Предполагаемое изобретение относится к электротехнике и может быть использовано для управления электромагнитными клапанами (ЭМК).
Известны различные способы управления ЭМК. Например, в [1] описаны способ и устройство, в котором осуществляется регулирование тока в обмотке катушки для управления работой ЭМК. Приведенные в [1] на FIG. 8 и FIG. 9 алгоритмы требуют для своей реализации контроля сразу трех параметров - напряжения на обмотке, тока протекающего через нее и ее сопротивления, что значительно усложняет схему управляющего устройства и предъявляет высокие требования к его вычислительным ресурсам. Кроме того, приведенные в [1] на FIG. 1, 3, 5, 6 схемы вариантов построения силового каскада управления не позволяют регулировать ток в обмотке при выключении ЭМК, так как в этом состоянии схемы ток не будет протекать через чувствительный элемент измерителя тока.
Для схем управления с одним силовым ключом проблема регулирования тока при выключении ЭМК может быть решена переносом датчика тока в цепь обмотки ЭМК и охвата его цепью возврата энергии, например, с использованием диода, как показано в [2] на FIG. 1 и FIG. 7. Подобное решение предполагает использование усилителя с высоким допустимым значением синфазного напряжения на входе и одновременно с высоким значением коэффициента подавления синфазной помехи, величина которой для схемы, приведенной в [2] на FIG. 7, в этом случае может превышать напряжение питания ЭМК, что сильно ограничивает возможности по выбору усилителя.
Для схем управления с тремя силовыми ключами (использующими дополнительный источник форсирующего напряжения) [3] и [4] используется датчик тока, включенный относительно нулевого (общего) потенциала, что позволяет решить проблему с использованием синфазного напряжения, но не позволяет измерять ток во время отключения ЭМК.
Способ управления ЭМК и устройство для его осуществления, описанный в [5], включает измерение напряжения на ЭМК и тока через него, а также использование результатов этих измерений в качестве вспомогательного средства для управления ЭМК. Например, одно или оба измеренных значения могут использоваться для определения момента фактического включения электромагнитного клапана. Характерные изменения тока ЭМК возникающие при срабатывании и отпускании ЭМК приведены в [5] на FIG. 7 и FIG. 8. Однако включение измерительного резистора (Sense Resistor) (52) над нижним ключом (24) (см. схему на FIG. 1 в описании [5]) предполагает использование усилителя с высоким допустимым значением синфазного напряжения на входе аналогично приведенному в [2] на FIG. 7.
Наиболее близким к предлагаемому техническому решению является способ управления электромагнитным клапаном и устройство для его осуществления по патенту RU 2756292 С1 [6]. Это техническое решение позволяет осуществлять управление ЭМК на основании непрерывного измерения тока в обмотке электромагнита (ЭМ) во время всего рабочего цикла ЭМК. При этом используется полумостовая схема управления и обеспечивается управление временем включенного состояния клапана. Такой способ управления ЭМК преимущественно может использоваться, когда необходимо включать клапан на короткое время, и предъявляются высокие требования к точности регулирования времени включенного состояния. Кроме того, для этого способа располагаемый диапазон регулирования времени включенного состояния находится в жестких пределах.
Задачей предполагаемого изобретения является расширение диапазона и повышение точности регулирования времени включенного состояния ЭМК.
Решение этой задачи достигается тем, что момент окончания движения якоря электромагнита в процессе срабатывания определяют при достижении локального минимума тока в обмотке электромагнита клапана при срабатывании, после чего отключают его обмотку от положительного вывода источника питания, размыкая верхний ключ. А при достижении током нижнего порогового значения, если к этому моменту не поступает сигнал на отключение клапана, замыкают верхний ключ, подключая обмотку электромагнита к положительному выводу источника питания, обеспечивая увеличение тока в обмотке. Когда ток в обмотке достигает верхнего порогового значения, опять размыкают верхний ключ. Причем замыкание верхнего ключа при достижении нижнего порогового значения тока и размыкание его при достижении его верхнего порогового значения производят до тех пор, пока не поступает сигнал на отключение клапана. А при поступлении сигнала на отключение клапана размыкают верхний ключ, если он был замкнут в момент поступления сигнала на отключение клапана, а затем с некоторой задержкой размыкают нижний ключ, обеспечивая равенство времени срабатывания и времени отпускания клапана. Причем, время включенного состояния клапана определяют как отрезок времени от момента окончания движения якоря электромагнита при срабатывании до момента достижения якорем электромагнита конечного положения при отпускании.
Проверку достижения локального минимума тока в обмотке электромагнита клапана при срабатывании осуществляют, например, путем сравнения текущего измеренного значения тока в обмотке с предыдущим и, если для последовательных измерений тока в обмотке текущее измеренное значение больше предыдущего, то считают, что локальный минимум тока достигнут.
Для обеспечения надежного срабатывания ЭМК верхнее пороговое значение тока в обмотке электромагнита клапана от момента получения команды на включение электромагнита до момента определения его срабатывания принимают равным 1,25 локального максимума тока в обмотке электромагнита клапана при срабатывании. А после срабатывания электромагнита для обеспечения экономии электроэнергии верхнее пороговое значение тока принимают равным величине локального минимума на этом участке.
Нижнее пороговое значение тока в обмотке электромагнита клапана принимают равным 1,25 значения тока отпускания, полученного при проведении лабораторных или заводских испытаний электромагнитного клапана при замкнутом нижнем и разомкнутом верхнем ключах.
Чтобы обеспечить равенство времени включения и выключения ЭМК, момент времени размыкания нижнего ключа при отпускании выбирается при выполнении неравенства

где  - интервал времени (задержка) между моментом размыкания верхнего ключа и моментом размыкания нижнего ключа;
- интервал времени (задержка) между моментом размыкания верхнего ключа и моментом размыкания нижнего ключа;
Ton - измеренное значение времени включения клапана в текущем рабочем цикле (значение интервала времени от момента подачи напряжения на обмотку электромагнита до окончания движения якоря электромагнита при срабатывании);
Т2 - расчетная величина интервала времени от момента размыкания нижнего ключа до окончания движения якоря электромагнита при выключении клапана, текущее значение которой в каждый момент времени / после поступления команды на выключение клапана определяется соотношением

где I(t) - текущее значение тока в обмотке электромагнита клапана;
С0, С1, С2 - постоянные коэффициенты, определяемые, например, методом наименьших квадратов при аппроксимации экспериментальной зависимости значений интервала времени от момента размыкания нижнего ключа до окончания движения якоря электромагнита при выключении клапана от текущего значения тока в обмотке электромагнита клапана в момент выключения нижнего ключа.
Для оптимального использования ресурсов микроконтроллера и обеспечения максимального быстродействия при цифровой реализации во время испытаний в лабораторных или заводских условиях формируют и сохраняют таблицу, содержащую полное множество возможных дискретных значений интервала времени от момента размыкания нижнего ключа до окончания движения якоря электромагнита, соответствующих каждому возможному текущему дискретному значению тока в обмотке электромагнита. Причем эту таблицу рассчитывают по аппроксимирующей зависимости для всего конечного множества допустимых значений дискретных отсчетов тока в обмотке электромагнита, которые он может принимать при выключении клапана. Затем эту таблицу используют в процессе эксплуатации для определения по текущему дискретному значению тока в обмотке электромагнита расчетной величины интервала времени от момента размыкания нижнего ключа до окончания движения якоря электромагнита при выключении клапана.
В предлагаемом устройстве для управления электромагнитным клапаном в качестве основного счетно-решающего управляющего блока используется микроконтроллер PIC16F1778-I/SO [7].
Для решения поставленной задачи предполагаемого изобретения в устройство для управления электромагнитным клапаном дополнительно введены второй, третий, четвертый и пятый резисторы. Причем, выход инвертирующего усилителя соединен с выводом 4 микроконтроллера. Первый вывод третьего резистора соединен с выводами 13, 22, 25 и 26 микроконтроллера, с выводом 24 которого соединены первые выводы второго и пятого резисторов. Вторые выводы второго и четвертого резисторов соединены с отрицательным выводом источника питания, второй вывод третьего резистора соединен с первым выводом четвертого резистора и выводом 23 микроконтроллера, а второй вывод пятого резистора соединен с выходом нижнего ключа.
Основная часть схемы устройства для управления ЭМК, обеспечивающая обработку сигналов измерения тока в обмотке электромагнита и формирование сигналов управления выполнена с использованием ресурсов микроконтроллера и его внутренних периферийных модулей.
При этом внутренние периферийные модули микроконтроллера задействованы и сконфигурированы так, что конфигурируемая логическая ячейка CLC1 используется в качестве логического элемента «И», первый вход которого соединен с разрядом «RC4» регистра порта ввода/вывода PORTC, соединенным также с модулем центрального процессора CPU и выводом 15 микроконтроллера, настроенным как цифровой вход. Второй вход логического элемента «И» соединен с выходом компаратора СМР5, неинвертирующий вход которого соединен с выходом цифроаналогового преобразователя DAC5. Инвертирующий вход компаратора СМР5 соединен с выводом 13 микроконтроллера, настроенным как аналоговый вход порта ввода/вывода PORTC. Конфигурируемая логическая ячейка CLC2 используется в качестве последовательно соединенных элемента «ИЛИ» и RS-триггера, вход установки «S» которого соединен с выходом логического элемента «И», а вход сброса «R» соединен с выходом элемента «ИЛИ». Прямой вход элемента «ИЛИ» соединен с инверсным выходом компаратора СМР4, а инверсный вход - с разрядом «RC4» регистра порта ввода/вывода PORTC. Неинвертирующий вход компаратора СМР4 соединен с выходом цифроаналогового преобразователя DAC2, а инвертирующий вход компаратора СМР4 соединен с выводом 26 микроконтроллера, настроенным как аналоговый вход порта ввода/вывода PORTC. Прямой выход «Q» RS-триггера соединен с разрядом «RC0» регистра порта ввода/вывода PORTC, соединенным также с выводом 11 микроконтроллера, настроенным как цифровой выход порта ввода/вывода PORTC. Разряд «RC1» регистра порта ввода/вывода PORTC, соединенный с двунаправленной шиной, соединен также с выводом 12 микроконтроллера, настроенным как цифровой выход порта ввода/вывода PORTC. Первый вход «AN2» аналого-цифрового преобразователя ADC соединен с выводом 4 микроконтроллера, настроенным как аналоговый вход порта ввода/вывода PORTA. Второй вход «AN11» аналого-цифрового преобразователя ADC соединен с выводом 25 микроконтроллера, настроенным как аналоговый вход порта ввода/вывода PORTB. Выход таймера Timer2 соединен с входом триггера автозапуска (Auto-conversion Trigger) аналого-цифрового преобразователя ADC. Неинвертирующий вход операционного усилителя ОРА2 соединен с выводом 24 микроконтроллера, настроенным как аналоговый вход порта ввода/вывода PORTB. Инвертирующий вход операционного усилителя ОРА2 соединен с выводом 23 микроконтроллера, настроенным как аналоговый вход порта ввода/вывода PORTB, а выход операционного усилителя ОРА2 соединен с выводом 22 микроконтроллера, настроенным как аналоговый выход порта ввода/вывода PORTB. Причем, модуль центрального процессора CPU, таймер Timer2, аналого-цифровой преобразователь ADC и цифроаналоговые преобразователи DAC2 и DAC5 (как это принято по умолчанию для микроконтроллера PIC16F1778-I/SO) соединены также с двунаправленной шиной (см. описание [7], FIGURE 1-1).
Сущность предлагаемого технического решения поясняется чертежами.
Фиг. 1. Варианты протекания тока в обмотке электромагнита ЭМК при разном возможном состоянии коммутации верхнего и нижнего ключей в используемой полумостовой схеме управления.
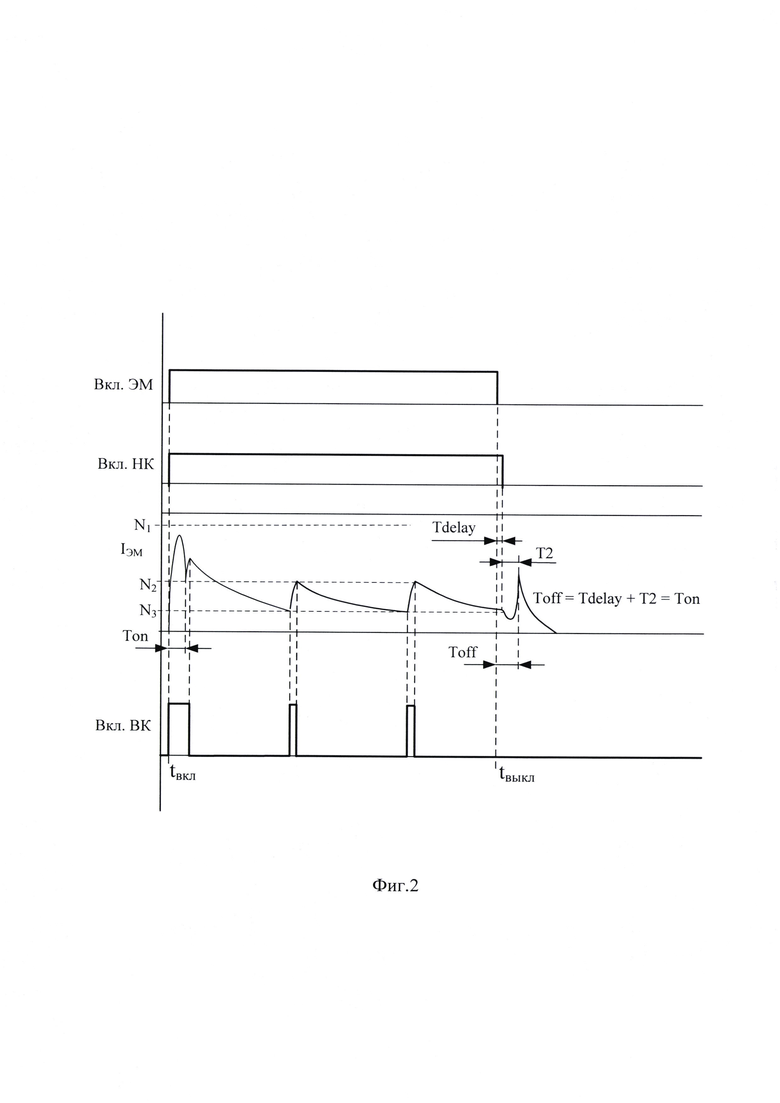
Фиг. 2. Временная диаграмма, поясняющая формирование управляющих сигналов и поведение тока в обмотке электромагнита при использовании предлагаемого способа управления ЭМК.
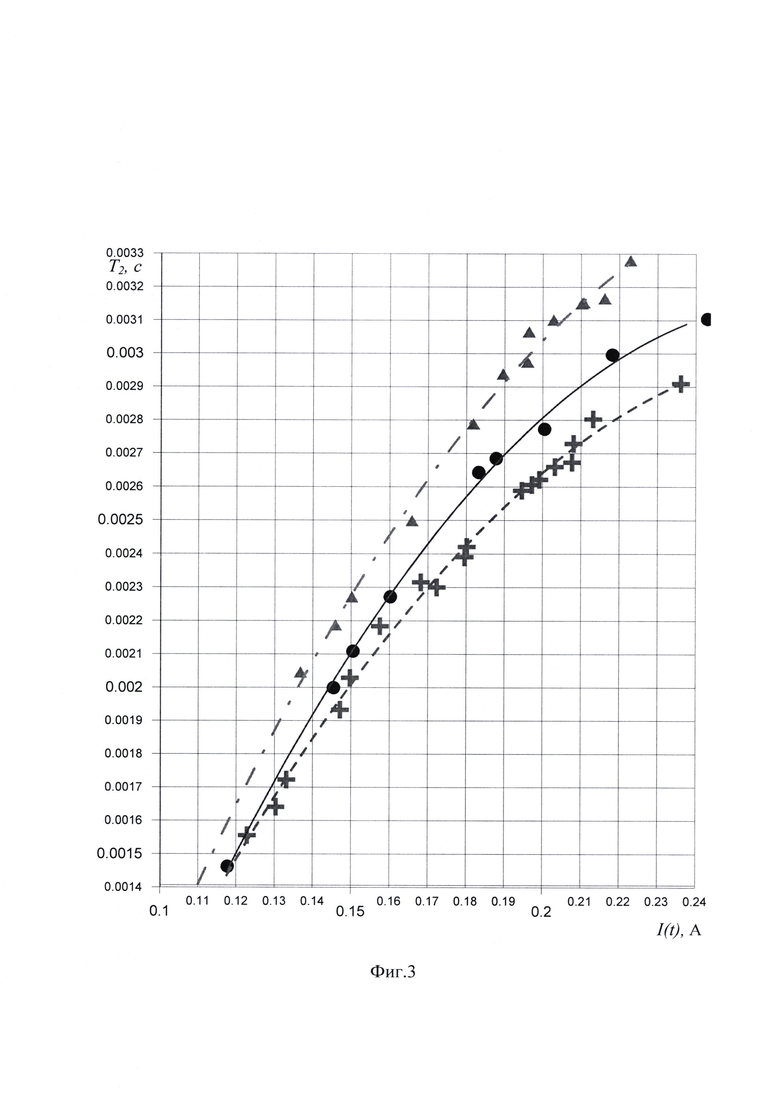
Фиг. 3. Экспериментальные и аппроксимирующие зависимости величины интервала времени от момента размыкания нижнего ключа до окончания движения якоря электромагнита при выключении клапана от текущего значения тока в обмотке ЭМ клапана.
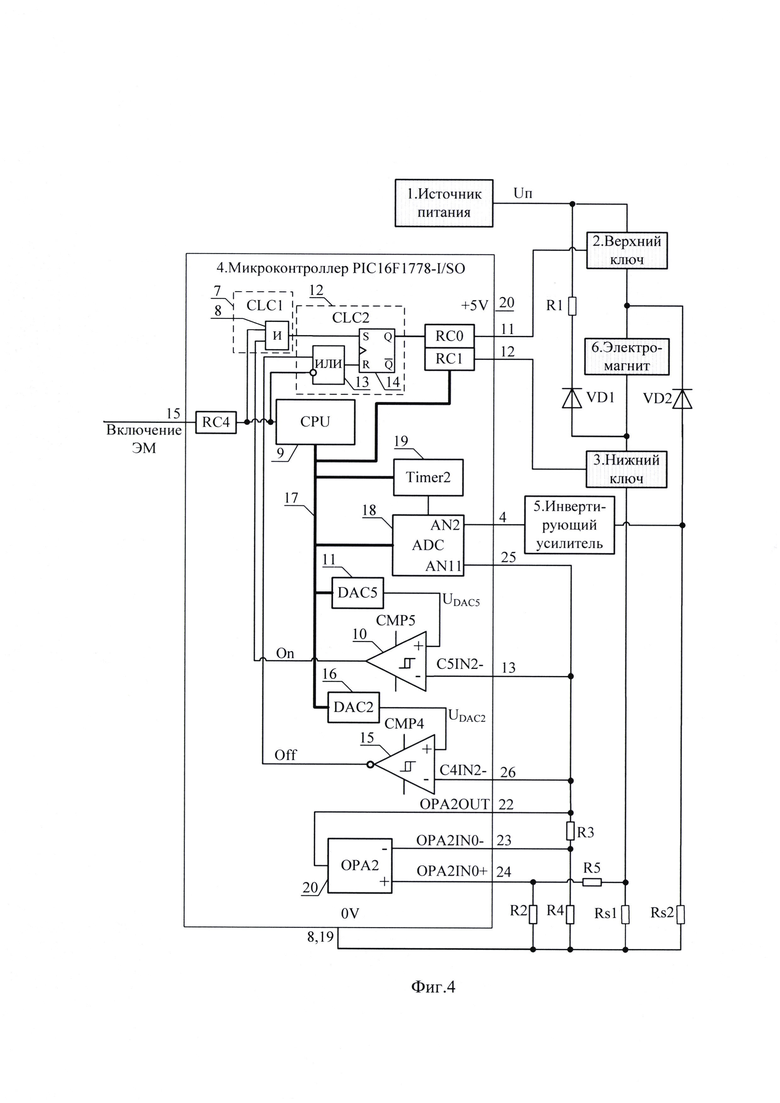
Фиг. 4. Функциональная схема предлагаемого устройства для управления ЭМК, включающая схему соединений внутренних периферийных модулей микроконтроллера PIC16F1778-I/SO, задействованных при решении задачи управления ЭМК с использованием предлагаемого способа.
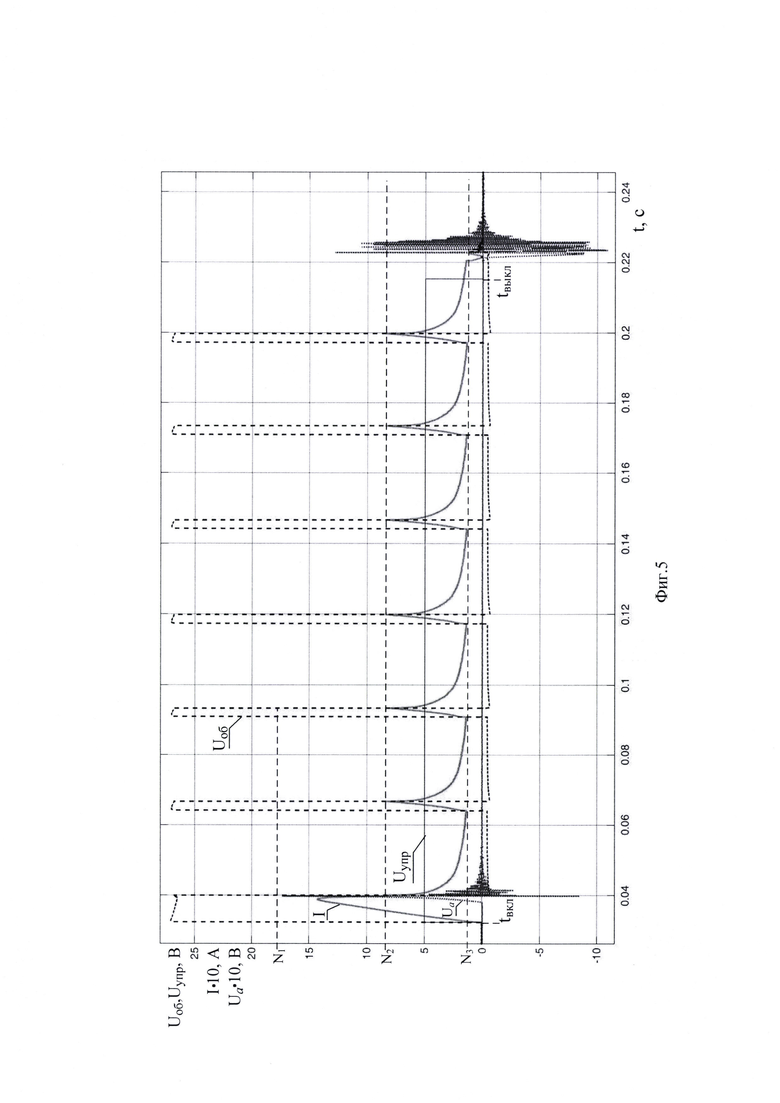
Фиг. 5. Экспериментальные переходные процессы изменения управляющего сигнала, напряжения, подаваемого на обмотку ЭМ, тока в обмотке и выходного сигнала акселерометра, жестко связанного с якорем, в одном рабочем цикле ЭМК.
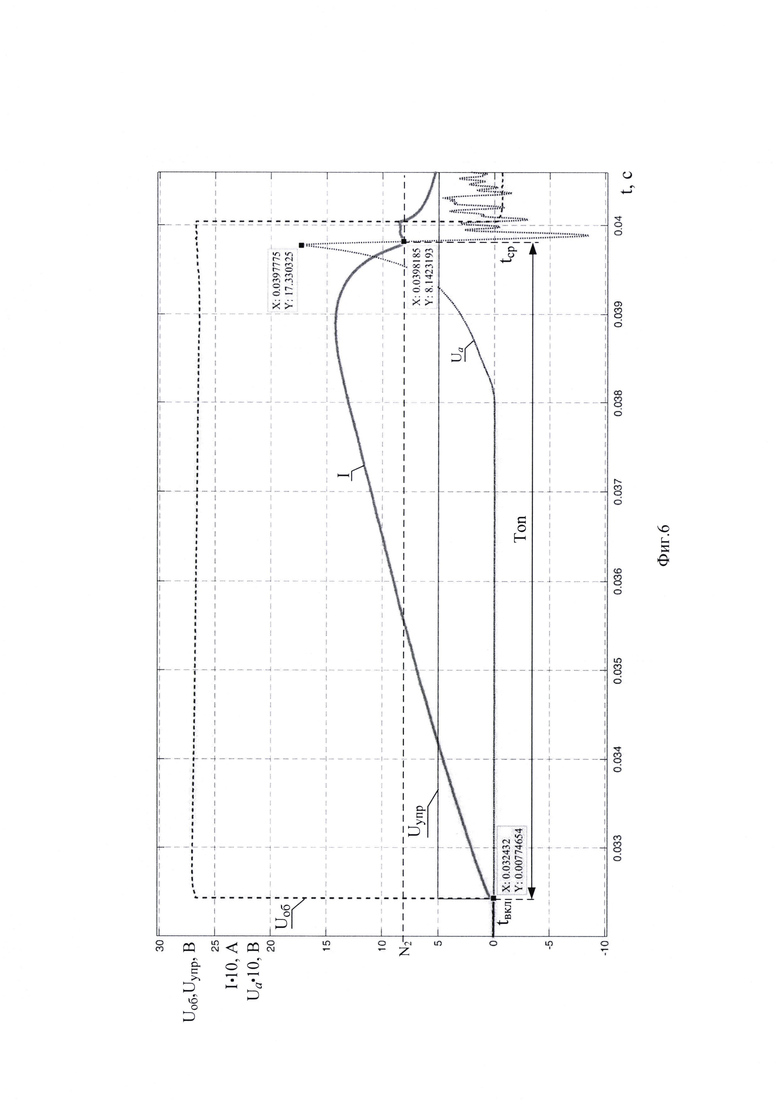
Фиг. 6. Экспериментальные переходные процессы изменения управляющего сигнала, напряжения, подаваемого на обмотку ЭМ, тока в обмотке и выходного сигнала акселерометра, жестко связанного с якорем, на участке срабатывания ЭМ в увеличенном масштабе.
Фиг. 7. Экспериментальные переходные процессы изменения управляющего сигнала, напряжения, подаваемого на обмотку ЭМ, тока в обмотке и выходного сигнала акселерометра, жестко связанного с якорем, на участке отпускания ЭМ в увеличенном масштабе.
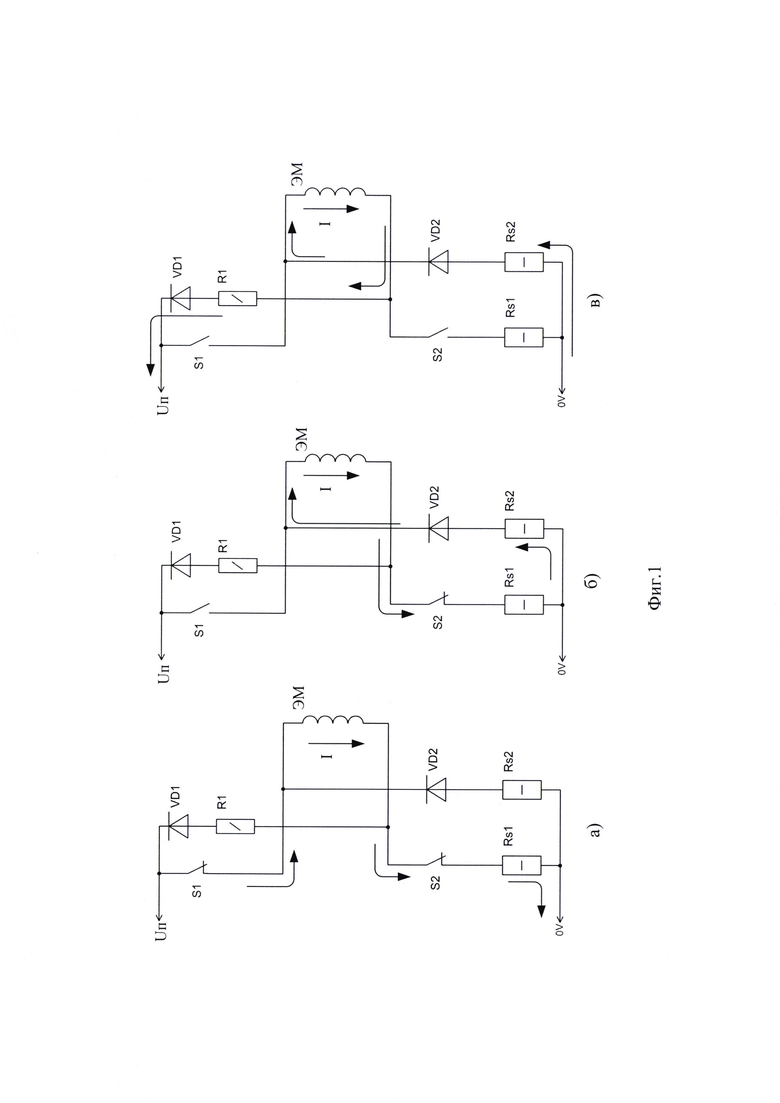
Использование полумостовой схемы управления ЭМ предполагает, что один вывод обмотки ЭМ с использованием верхнего ключа и, возможно, некоторых элементов схемы подключается к положительному выводу источника питания, а второй вывод обмотки ЭМ с использованием нижнего ключа и, возможно, некоторых других элементов схемы подключается к отрицательному выводу источника питания. На фиг. 1 представлены три возможных состояния упрощенной электрической принципиальной схемы силового каскада питания ЭМ клапана, используемые при управлении ЭМК с помощью заявляемого способа с применением полумостовой схемы управления.
На фиг. 1,а показана цепь протекания тока при замыкании обоих ключей при включении клапана и ожидании срабатывания ЭМ. Когда ток в обмотке ЭМ достигает в процессе срабатывания локального максимума, можно с уверенностью сказать, что началось движение якоря ЭМ. Ток через обмотку ЭМ течет в этом случае по цепи: положительный вывод источника питания Uп, верхний ключ S1, обмотка ЭМ, нижний ключ S2, первый измерительный резистор Rs1, отрицательный вывод источника питания 0 V.
Чтобы быть уверенным, что обнаруженный локальный максимум не является результатом действия помех и движение якоря ЭМ в направлении стопа стало необратимым, необходимо произвести проверку достижения локального максимума.
Обеспечить эту проверку при цифровой реализации способа можно, например, путем сравнения текущего измеренного значения тока в обмотке с предыдущим. Экспериментально установлено: если для трех последовательных измерений тока в обмотке текущее измеренное значение меньше предыдущего, то можно считать, что локальный максимум тока достигнут и движение якоря ЭМ при срабатывании стало необратимым. Определение времени срабатывания выполняется по обнаружению локального минимума в процессе изменения тока ЭМ при срабатывании.
Для обеспечения регулирования времени выключения клапана с помощью заявляемого способа управления ЭМК предлагается снятие напряжения с обмотки ЭМ для обеспечения отпускания производить в два этапа, используя формирование двух цепей рекуперации магнитной энергии ЭМ.
При отключении на первом этапе обмотки ЭМ от положительного вывода источника питания путем размыкания верхнего ключа формируется цепь так называемой медленной рекуперации, при которой ток, протекающий в обмотке ЭМ, замыкается по контуру (см. фиг. 1,6): обмотка ЭМ, нижний ключ S2, первый измерительный резистор Rs1, второй измерительный резистор Rs2, второй диод VD2.
Если требуется ускорить процесс отпускания ЭМ, то на втором этапе отключают обмотку ЭМ от отрицательного вывода источника питания, размыкая нижний ключ и формируя цепь быстрой рекуперации магнитной энергии. Верхний ключ оставляют разомкнутым. В этом случае накопленная энергия возвращается в источник питания, и ток протекает по цепи (см. фиг. 1в): отрицательный вывод источника питания 0 V, второй измерительный резистор Rs2, второй диод VD2, обмотка ЭМ, резистор R1, первый диод VD1, положительный вывод источника питания Uп.
На фиг. 2 приведена временная диаграмма, поясняющая формирование управляющих сигналов и поведение тока в обмотке электромагнита при использовании предлагаемого способа управления ЭМК. Временная диаграмма отражает один рабочий цикл функционирования ЭМК.
На первой (верхней) эпюре «Вкл.ЭМ» показан внешний управляющий командный сигнал, поступающий от системы верхнего уровня и определяющий момент времени поступления команды на включение ЭМК tвкл и момент времени поступления команды на выключение ЭМК tвыкл. Когда поступает команда на включение ЭМК, производится одновременное замыкание верхнего и нижнего ключей (см. вторую и четвертую эпюры «Вкл.НК» и «Вкл.ВК»), и напряжение питания подается на обмотку ЭМ. При этом начинается нарастание тока в обмотке ЭМ (см. третью эпюру «IЭМ»)- Когда ток в обмотке достигает своего локального максимума (вернее чуть раньше) начинается движение якоря ЭМ, которое продолжается вплоть до достижения током в обмотке его локального минимума. Будем считать, что достижение током в обмотке ЭМ на участке срабатывания локального минимума, соответствует моменту окончания движения якоря при срабатывании ЭМ. Обоснование этого явления будет дано ниже. Таким образом, отрезок времени от момента подачи напряжения на обмотку ЭМ до достижения током в обмотке локального минимума при срабатывании будем обозначать Ton и называть временем открывания клапана или временем срабатывания ЭМ.
При цифровой реализации проверку достижения локального минимума тока в обмотке электромагнита клапана при срабатывании осуществляют, например, путем сравнения текущего измеренного значения тока в обмотке с предыдущим и, если для последовательных измерений тока в обмотке текущее измеренное значение больше предыдущего, то считают, что локальный минимум тока достигнут. Когда принято решение о достижении локального минимума тока, производится размыкание верхнего ключа (см. эпюру «Вкл.ВК» на фиг. 2). При этом обмотка ЭМ отключается от положительного вывода источника питания, и ток в обмотке ЭМ будет протекать по цепи, показанной на фиг. 1,б. В результате ток в обмотке будет медленно снижаться (см. эпюру «IЭМ» на фиг.2). С этого момента начинается участок удержания ЭМК во включенном состоянии.
Работа схемы управления ЭМК на этом участке определяется установленными верхним и нижним пороговыми значениями тока в обмотке ЭМ. Схема работает таким образом, что при достижении током нижнего порогового значения замыкается верхний ключ и обмотка ЭМ подключается к источнику питания (см. эпюры «IЭМ» и «Вкл.ВК» на фиг. 2), что приводит к довольно резкому нарастанию тока. Когда ток достигает верхнего порогового значения, верхний ключ размыкается, и начинается медленное уменьшение тока в обмотке. Периодическое повторение участков нарастания и спадания тока в обмотке ЭМ продолжается до тех пор, пока от системы верхнего уровня не поступает команда на выключение клапана и не заканчивается участок удержания в рабочем цикле ЭМК.
Верхнее и нижнее пороговые значения тока выбираются таким образом, чтобы, во-первых, обеспечить надежное удержание якоря ЭМ в положении, соответствующем открытому состоянию клапана, а во-вторых, добиться возможно низкого потребления электроэнергии на этом участке рабочего цикла ЭМК. Предложено нижнее пороговое значение тока в обмотке ЭМ (обозначено N3 на эпюрах фиг. 2) принимать равным 1,25 значения тока отпускания, полученного при проведении лабораторных или заводских испытаний ЭМК при замкнутом нижнем и разомкнутом верхнем ключах. Верхнее пороговое значение тока в обмотке ЭМ на участке от момента получения команды на включение ЭМ до момента определения его срабатывания принимают равным 1,25 локального максимума тока в обмотке ЭМ при срабатывании (обозначено N1 на эпюрах фиг. 2). При этом значение локального максимума тока в обмотке ЭМ при срабатывании определяется при проведении лабораторных или заводских испытаний ЭМК. Такой выбор верхнего порогового значения тока на этом участке рабочего цикла ЭМК обеспечивает надежное срабатывание ЭМ. После срабатывания ЭМ верхнее пороговое значение тока для уменьшения тока потребления снижают и принимают равным величине локального минимума тока на этом участке (обозначено N2 на эпюрах фиг. 2).
Предложенный режим работы ЭМК на участке удержания обеспечивает надежное удержание якоря ЭМ в положении, соответствующем открытому состоянию клапана, и позволяет снизить потребление энергии не менее чем в 2 раза и частоту коммутации верхнего ключа на два порядка по сравнению с традиционно применяемым для стабилизации тока режимом широтно-импульсной модуляции.
После поступления от системы верхнего уровня команды на выключение ЭМК с некоторой задержкой (на эпюрах фиг. 2 она обозначена Tdelay) размыкается нижний ключ, и происходит отпускание ЭМ и закрытие клапана. Если на момент поступления команды на выключение ЭМК верхний ключ был в замкнутом положении, то по этой команде он размыкается. После размыкания нижнего ключа через интервал времени Т2 якорь ЭМ перемещается в положение, соответствующее закрытому состоянию клапана.
Таким образом, время выключения клапана Toff (интервал времени от поступления команды на выключение ЭМК до перемещения якоря ЭМ в положение, соответствующее закрытому состоянию клапана) складывается из двух отрезков: задержки между поступлением команды на выключение ЭМК и размыканием нижнего ключа Tdelay и интервала времени Т2 между размыканием нижнего ключа и моментом достижения якорем ЭМ положения, соответствующего закрытому состоянию клапана (см. эпюры на фиг. 2). Предложено считать, что момент достижения якорем ЭМ положения, соответствующего закрытому состоянию клапана, соответствует локальному максимуму тока в обмотке при отпускании ЭМ.
Экспериментально установлено, что интервал времени Т2 зависит главным образом от величины тока в обмотке ЭМ в момент размыкания нижнего ключа. Значит, измеряя текущее значение тока в обмотке ЭМ и текущее значение времени от поступления команды на выключение клапана, можно прогнозировать величину времени выключения ЭМК Toff, и, на этом основании, выбирать момент размыкания нижнего ключа для обеспечения желаемой величины времени выключения ЭМК. Поскольку одной из задач предполагаемого изобретения является обеспечение равенства времен включения и выключения ЭМК нужно обеспечить выполнение соотношения

При проведении лабораторных испытаний ЭМК получены экспериментальные зависимости интервала времени Т2 от текущего значения тока в обмотке ЭМ I(t) в момент размыкания нижнего ключа для трех значений напряжения питания -номинального, минимально допустимого и максимально допустимого. Эти зависимости приведены на фиг. 3. На этом графике экспериментальные точки, соответствующие номинальному значению напряжения питания, нанесены кружочками; точки, соответствующие минимально допустимому значению напряжения питания нанесены треугольниками; а точки, соответствующие максимально допустимому значению напряжения питания нанесены крестиками. Все три зависимости были аппроксимированы с использованием выражения вида (2) методом наименьших квадратов. Получены кривые, нанесенные на график сплошной, штрихпунктирной и штриховой линиями соответственно. Для номинального значения напряжения питания получены следующие величины постоянных коэффициентов: С0=-0.002257; С1=0.04032 и С2= -0.07499. Экспериментально установлено, что для использованного при проведении испытаний ЭМК погрешность определения интервала времени Т2 с использованием кривой, соответствующей номинальному значению напряжения питания, обеспечит точность выполнения соотношения (3) не хуже 1%.
При цифровой реализации для оптимального использования ресурсов микроконтроллера и обеспечения максимального быстродействия удобно при проведении лабораторных или заводских испытаний ЭМК формировать таблицу, в которой каждому возможному дискретному значению, которое может приобретать ток в обмотке ЭМ на участке отпускания, будет соответствовать расчетное значение интервала времени Т2, полученное, например, с использованием аппроксимирующей зависимости вида (2). Эту таблицу можно занести в память микроконтроллера. Тогда при эксплуатации ЭМК можно будет определять расчетное значение интервала времени Т2 без выполнения каких либо вычислительных операций, что позволит повысить быстродействие устройства для управления ЭМК и точность его работы.
Функциональная схема устройства для управления ЭМК, реализующего предлагаемый способ с использованием микроконтроллера PIC16F1778-I/SO, приведена на фиг. 4.
Устройство для управления электромагнитным клапаном содержит (см. функциональную схему фиг. 4) источник питания (1), верхний ключ (2), нижний ключ (3), первый резистор R1, первый и второй диоды VD1 и VD2, первый и второй измерительные резисторы Rs1 и Rs2, микроконтроллер PIC16F1778-I/SO (4) и инвертирующий усилитель (5), вход которого соединен с анодом второго диода VD2 и первым выводом второго измерительного резистора Rs2, второй вывод которого соединен с вторым выводом первого измерительного резистора Rs1 и с отрицательным выводом источника питания (1), с которым также соединены выводы 8 и 19 микроконтроллера (4), вывод 15 которого соединен с дискретным выходом системы верхнего уровня. Вход верхнего ключа (2) соединен с положительным выводом источника питания (1), а его выход с катодом второго диода VD2 и первым выводом электромагнита клапана (6), второй вывод которого соединен с входом нижнего ключа (3) и анодом первого диода VD1. Выводы 11 и 12 микроконтроллера (4) соединены с управляющими входами соответственно верхнего и нижнего ключей (2) и (3), катод первого диода VD1 соединен с первым выводом первого резистора R1, второй вывод которого соединен с положительным выводом источника питания (1). Выход нижнего ключа (3) соединен с первым выводом первого измерительного резистора Rs1. Устройство также содержит второй, третий, четвертый и пятый резисторы R2, R3, R4 и R5. Выход инвертирующего усилителя (5) соединен с выводом 4 микроконтроллера (4). Первый вывод третьего резистора R3 соединен с выводами 13, 22, 25 и 26 микроконтроллера (4), с выводом 24 которого соединены первые выводы второго и пятого резисторов R2 и R5. Вторые выводы второго и четвертого резисторов R2 и R4 соединены с отрицательным выводом источника питания (1). Второй вывод третьего резистора R3 соединен с первым выводом четвертого резистора R4 и выводом 23 микроконтроллера (4), а второй вывод пятого резистора R5 соединен с выходом нижнего ключа (3).
Предложенное техническое решение позволяет значительно снизить нагрузку на вычислительные ресурсы микроконтроллера (МК) и уменьшить габариты устройства, что достигается использованием для построения схемы интегрированных периферийных модулей, таких как операционный усилитель, цифроаналоговый преобразователь (ЦАП), аналогово-цифровой преобразователь (АЦП), компаратор, таймер и конфигурируемая логическая ячейка CLC (Configurable Logic Cell). Для построения контура управления током с использованием МК используются его внутренние периферийные модули Периферии Независимой от Ядра (ПНЯ) (Core Independent Peripheral - CIP). В этом случае функционирование контура управления не зависит (или почти не зависит) от тактовой частоты МК и его состояния. Подобная периферия конфигурируется программой МК, но дальнейшее ее функционирование может быть совершенно независимым. В концепции ПНЯ периферийные модули могут соединяться внутри МК и не иметь выходов наружу, что дает возможность синтеза функциональных блоков, т.е. совместного использования нескольких периферийных модулей для решения конкретных задач. Это позволяет минимизировать количество используемых выводов корпуса МК и размеры изделия в целом.
Источник питания (1) обеспечивает питание силовых цепей управления ЭМ (6) и формирование напряжения 5 В для питания МК (4). Верхний и нижний ключи (2) и (3) выполняют коммутацию обмотки ЭМ (6) по сигналам, поступающим от МК (4). Измерительные резисторы Rs1, Rs2 служат для контроля величины тока в обмотке ЭМ (6) (Rs1 при срабатывании и Rs2 при отпускании). Демпфирующие цепи VD1, R1 и VD2 обеспечивают защиту верхнего и нижнего ключей (2) и (3) от воздействия ЭДС самоиндукции, возникающей в обмотке ЭМ (6) при размыкании верхнего или нижнего ключей. В качестве верхнего ключа (2) в устройстве может быть использован ключ верхнего уровня AUIPS7221R [8], содержащий в своем составе драйвер MOSFET, управляемый логическим сигналом. В качестве нижнего ключа (3) можно применить управляемый логическим уровнем транзистор IRLR2905 [9], который допускает для управления им использовать выходной сигнал МК (4). Инвертирующий усилитель (5) обеспечивает нормирование сигнала, пропорционального величине тока в обмотке ЭМ (6). Он может быть выполнен, например, по схеме, приведенной в описании [10].
Внутренние периферийные модули МК (4) задействованы и сконфигурированы так, что (см. функциональную схему соединений внутренних периферийных модулей микроконтроллера PIC16F1778-I/SO на фиг. 4) конфигурируемая логическая ячейка CLC1 (7) используется в качестве логического элемента «И» (8), первый вход которого соединен с разрядом «RC4» регистра порта ввода/вывода PORTC, соединенным также с модулем центрального процессора CPU (9) и выводом 15 МК, настроенным как цифровой вход порта ввода/вывода PORTC. Второй вход логического элемента «И» (8) соединен с выходом компаратора СМР5 (10), неинвертирующий вход которого соединен с выходом цифроаналогового преобразователя DAC5 (11). Инвертирующий вход C5IN2-компаратора СМР5 (10) соединен с выводом 13 МК, настроенным как аналоговый вход порта ввода/вывода PORTC. Конфигурируемая логическая ячейка CLC2 (12) используется в качестве последовательно соединенных элемента «ИЛИ» (13) и RS-триггера (14), вход установки «S» которого соединен с выходом логического элемента «И» (8), а вход сброса «R» соединен с выходом элемента «ИЛИ» (13), прямой вход которого соединен с инверсным выходом компаратора СМР4 (15), а инверсный вход - с разрядом «RC4» регистра порта ввода/вывода PORTC. Положительный вход компаратора СМР4 (15) соединен с выходом цифроаналогового преобразователя DAC2 (16), а отрицательный вход C4IN2- компаратора СМР4 (15) соединен с выводом 26 МК, настроенным как аналоговый вход порта ввода/вывода PORTC. Прямой выход «Q» RS-триггера (14) соединен с разрядом «RC0» регистра порта ввода/вывода PORTC, соединенным также с выводом 11 МК, настроенным как цифровой выход порта ввода/вывода PORTC. Разряд «RC1» регистра порта ввода/вывода PORTC, соединенный с двунаправленной шиной (17), соединен также с выводом 12 МК, настроенным как цифровой выход порта ввода/вывода PORTC. Первый вход «AN2» аналого-цифрового преобразователя ADC (18) соединен с выводом 4 МК, настроенным как аналоговый вход порта ввода/вывода PORTA. Второй вход «AN11» аналого-цифрового преобразователя ADC (18) соединен с выводом 25 МК, настроенным как аналоговый вход порта ввода/вывода PORTB. Выход таймера Timer2 (19) соединен с входом триггера автозапуска (Auto-conversion Trigger) аналого-цифрового преобразователя ADC (18). Неинвертирующий вход OPA2IN0+операционного усилителя ОРА2 (20) соединен с выводом 24 МК, настроенным как аналоговый вход порта ввода/вывода PORTB. Инвертирующий вход OPA2IN0- операционного усилителя ОРА2 (20) соединен с выводом 23 МК, настроенным как аналоговый вход порта ввода/вывода PORTB. Выход OPA2OUT операционного усилителя ОРА2 (20) соединен с выводом 22 МК, настроенным как аналоговый выход порта ввода/вывода PORTB. Причем, модуль центрального процессора CPU (9), таймер Timer2 (19), аналого-цифровой преобразователь ADC (18) и цифроаналоговые преобразователи DAC2 (16) и DAC5 (11) соединены также (как это принято по умолчанию для микроконтроллера PIC16F1778-I/SO) с двунаправленной шиной (17) (см. описание [7], FIGURE 1-1).
Работает схема следующим образом. Выходной сигнал операционного усилителя ОРА2 (20) через вывод 4 МК (4) поступает на вход AN2 аналого-цифрового преобразователя ADC (18), работающего в режиме периодического измерения без вмешательства программы по сигналу таймера Timer2 (19), поступающему на вход триггера автозапуска (Auto-conversion Trigger) аналого-цифрового преобразователя ADC (18). Нормирование тока при срабатывании ЭМ (6) осуществляется неинвертирующим усилителем, построенным на операционном усилителе ОРА2 (20) и резисторах R2 - R5. Неинвертирующий вход OPA2IN0+операционного усилителя ОРА2 (20) соединен с 24 выводом МК (4). Инвертирующий вход OPA2IN0- операционного усилителя ОРА2 (20) соединен с выводом 23 МК (4), а выход - с выводом 22 МК (4). С выхода операционного усилителя ОРА2 (20) через вывод 22 МК (4) сигнал, пропорциональный величине тока в обмотке ЭМ (6), через выводы 26 и 13 МК (4) поступает на инвертирующие входы компараторов СМР4 (15) и СМР5 (10), где он сравниваются с пороговыми значениями напряжений, поступающими с выходов ЦАП DAC2 (16) и DAC5 (11) соответственно. Кроме того, выходной сигнал с выхода операционного усилителя ОРА2 (20) через вывод 25 МК (4) поступает на вход AN11 аналого-цифрового преобразователя ADC (18), что позволяет контролировать ток в обмотке ЭМ (6) при его срабатывании.
Сигнал с выхода компаратора СМР5 (10) поступает на вход элемента «И» (8), выполненного на конфигурируемой логической ячейке CLC1 (7), и при наличии на его втором входе логической «1», соответствующей сигналу включения ЭМ, поступающему с вывода 15 МК (4), попадает на вход установки «S» (Set) RS-триггера (14), что приводит к формированию сигнала, соответствующего логической «1», на его выходе «Q».
Проинвертированный сигнал с выхода компаратора СМР4 (15) через элемент ИЛИ (13) поступает на вход «R» (Reset) сброса RS-триггера (14) и обнуляет его выход «Q».
Сигнал с выхода «Q» RS-триггера (14), через вывод 11 МК (4) обеспечивает прямое управление верхним ключом (2). Управление нижним ключом (3) осуществляется программно через бит «RC1» регистра порта ввода/вывода PORTC и вывод 12 МК (4) в зависимости от состояния бита «RC4» регистра порта ввода/вывода PORTC.
Управление работой ЭМ (6) выполняется силовым каскадом, выполненным, как уже отмечалось, по полумостовой схеме. Величина тока, протекающего через обмотку ЭМ (6), при срабатывании оценивается по падению напряжения на первом измерительном резисторе Rs1.
При включении источника питания (1) МК (4) выполняет инициализацию периферийных модулей, их внутреннее соединение, загружает в ЦАП DAC5 (11) значение, соответствующее величине N3=1,25*Ioff (Ioff - минимальное значение тока на участке отпускания при отключении ЭМ (6) верхним ключом (2)), в ЦАП DAC2 (16) загружает значение, соответствующее величине N1=1,25*Ionmax (Ionmax - максимальное значение локального максимума тока при срабатывании ЭМ (6) в случае наихудшего сочетания внешних воздействий на него), и переходит к ожиданию от системы верхнего уровня команды «Вкл.ЭМ» на включение ЭМК. При этом логическая «1» на выходе компаратора СМР5 (10) разрешает прохождение сигнала включения ЭМ «Вкл.ЭМ» через элемент «И» (8) на вход «S» RS-триггера. При поступлении такого сигнала на выходе «Q» RS-триггера (14) появится логическая «1» которая через вывод 11 МК (4) включит верхний ключ (2).
Кроме того, сигнал «Вкл.ЭМ», поступивший на вывод 15 МК (4) будет обработан модулем центрального процессора CPU (9) (например, с использованием функции прерывания Interrupt-on-Change (IOC) для данного цифрового входа (состояния бит «RC4»)). При этом модуль центрального процессора CPU (9) устанавливает на выводе 12 логическую «1» (разряд «RC1»), обеспечивая включение нижнего ключа (3).
Одновременно с этим производится запуск таймера Timer2 (19) для циклического запуска преобразования сигнала аналого-цифрового преобразователя ADC (18) по входу AN11 для контроля тока в обмотке ЭМ (6) при срабатывании. Факт срабатывания ЭМ (6) определяется по обнаружению локального минимума тока после прохождения им локального максимума. Измерение времени срабатывания ЭМ (6) выполняется по числу запусков сигнала аналого-цифрового преобразователя ADC (18), то есть по числу срабатываний таймера Timer2 (19). Время срабатывания Ton ЭМ (6) определяется по соотношению Ton=(n-1)* ТТ2, где n - количество срабатываний, а ТТ2 - время цикла таймера Timer2 (19).
После определения факта срабатывания в ЦАП DAC5 (11) загружается значение N2, соответствующее полученному в результате преобразования аналого-цифровым преобразователем ADC (18) значению локального минимума тока ЭМ (6) при срабатывании. При использовании в качестве опорного напряжения для АЦП и ЦАП одного источника напряжения (напряжения питания микроконтроллера +5 V), преобразования данных при передаче не требуется, что дополнительно сокращает загрузку модуля центрального процессора CPU (9). Кроме того, такое решение позволяет получить результат независимый от точности источника опорного напряжения. При достижении током в обмотке верхнего порогового значения N2 верхний ключ (2) отключается, и далее работа устройства продолжается в автоматическом режиме. При достижении током в обмотке ЭМ (6) величины N3, на выходе компаратора СМР5 (10) формируется логическая «1», которая при наличии сигнала «Вкл.ЭМ» поступает на вход «S» RS-триггера (14) и устанавливает его выход «Q» в состояние логическая «1», что приводит к замыканию верхнего ключа (2).
При обнулении сигнала «Вкл.ЭМ» МК (4) (в зависимости от величины тока в обмотке ЭМ) отсчитывает задержку в циклах таймера Timer2 (19) для обеспечения равенства времен отпускания и срабатывания, после чего устанавливает в логический «0» бит «RC1», обеспечивая выключение нижнего ключа (3). После чего аналого-цифровой преобразователь ADC (18) переключается на преобразование тока в обмотке ЭМ (6) с входа AN2 (вывода 4 МК (4)). Сигнал, пропорциональный величине тока в обмотке ЭМ (6) поступает на данный вывод МК (4) с выхода инвертирующего усилителя (5). Данный усилитель обеспечивает инвертирование и нормирование напряжения с второго измерительного резистора Rs2, и может быть выполнен, например, на микросхеме MCP6V01T-E/SN [10]. По полученным значениям определяются сначала локальный минимум, а затем локальный максимум тока в обмотке ЭМ (6) при отпускании. В момент обнаружения локального максимума определяется значение времени отпускания, и таймер Timer2 (19) останавливается.
Работоспособность предлагаемого технического решения подтверждена экспериментально.
На фиг. 5 приведены полученные в одном полном цикле работы ЭМК экспериментальные переходные процессы изменения сигнала (Uупр - тонкая сплошная линия), управляющего включением и выключением клапана, напряжения (Uоб - штриховая линия), подаваемого на обмотку ЭМ, тока в обмотке (I - толстая сплошная линия), и выходного сигнала акселерометра (Ua - пунктирная линия), жестко связанного с якорем. На этом же графике показаны нижнее (N3) и верхнее (N1 и N2) пороговые значения тока в обмотке ЭМ и моменты времени tвкл и tвыкл, соответствующие поступлению команд на включение и выключение клапана.
Из этого графика видно, что в момент времени tвыкл подается напряжение на обмотку ЭМ. При этом верхнее пороговое значение тока имеет значение N1. После срабатывания ЭМ напряжение с обмотки снимается, устанавливается верхнее пороговое значение тока N2 и начинается участок удержания в рабочем цикле ЭМК. Далее следует относительно продолжительный участок уменьшения тока, направление протекания которого соответствует схеме медленной рекуперации магнитной энергии, показанной на фиг. 1,б. При достижении током нижнего порогового значения N3 замыкается верхний ключ и на обмотку ЭМ опять подается напряжение, что приводит к новому увеличению тока в обмотке. Когда величина тока в обмотке достигает верхнего порогового значения N2, размыкается верхний ключ, и начинается снижение тока до нижнего порогового значения. Такие периодические замыкания и размыкания верхнего ключа, сопровождающиеся изменением тока в обмотке между нижним и верхним пороговыми значениями, продолжаются до прихода команды на выключение клапана в момент времени tвыкл, после чего начинается участок отпускания рабочего цикла ЭМК.
Через некоторую задержку во времени после поступления команды на выключение клапана производится размыкание нижнего ключа, и схема питания ЭМ переходит в показанное на фиг. 1, в состояние, и соответствующее быстрой рекуперации магнитной энергии. После размыкания нижнего ключа падение тока в обмотке ускоряется, что приводит к достаточно быстрому отпусканию ЭМ.
Имеет смысл дальнейшее рассмотрение полученных экспериментальных процессов производить в более крупном масштабе и отдельно для участков срабатывания и отпускания.
На фиг. 6 показаны экспериментальные переходные процессы изменения управляющего сигнала, напряжения, подаваемого на обмотку ЭМ, тока в обмотке и выходного сигнала акселерометра, жестко связанного с якорем, на участке срабатывания ЭМ в увеличенном масштабе. Типы линий, которыми показаны все процессы изменения переменных параметров, полностью соответствуют фиг. 5.
В таком масштабе становится понятным, зачем при проведении испытаний использовался сигнал с выхода акселерометра, жестко связанного с якорем ЭМ. Ось чувствительности акселерометра при этом ориентирована в направлении перемещения якоря. Такой способ диагностики состояния якоря ЭМ подробно описан в [11]. Сигнал с выхода акселерометра позволяет точно определять момент времени окончания движения якоря ЭМ при срабатывании и отпускании ЭМ. В момент удара якоря о препятствие происходит резкое изменение и смена знака его ускорения, что четко видно на графиках переходных процессов.
Из графиков, приведенных на фиг.6, хорошо видно, что момент времени удара якоря о стоп при срабатывании почти совпадает с моментом времени достижения током в обмотке локального минимума. Разница между этими моментами времени составляет 41 мкс. Таким образом, погрешность определения времени срабатывания tcp по локальному минимуму тока составляет 0.56%, а величина времени срабатывания ЭМ при этом составляет Ton=0.0073455 с.
Не менее интересно рассмотреть в увеличенном масштабе зарегистрированные переходные процессы на участке отпускания. Это позволяют сделать графики, приведенные на фиг. 7. Все обозначения на графиках сохранены.
Из этого графика видно, что разница между моментом удара якоря ЭМ о корпус и моментом достижения током локального максимума при отпускании составляет 8.7 мкс, что приводит к погрешности определения времени отпускания 0.12%. Величина времени отпускания при его определении по локальному максимуму тока в обмотке составляет Toff=0.007381 с.
На графике показаны интервалы времени Tdelay и Т2 (Toff=Tdelay+Т2), а также момент поступления команды на выключение клапана tвыкл, момент выключения нижнего ключа tвыкл.НК и момент окончания движения якоря tотп. Момент выключения нижнего ключа выбирался с использованием соотношения (1) при определении расчетного значения интервала времени Т2 по аппроксимирующей кривой, приведенной на фиг. 3.
Таким образом, разность между временем срабатывания и отпускания в рассматриваемом рабочем цикле ЭМ составила 35.5 мкс, т.е. время отпускания больше времени срабатывания на 0.48%.
Приведенные на фиг. 5-7 экспериментальные результаты наглядно подтверждают работоспособность и эффективность предлагаемого технического решения. Его использование позволяет практически неограниченно расширить диапазон регулирования времени открытого состояния ЭМК. При этом достигается высокая точность обеспечения значения времени открытого состояния клапана, задаваемого длительностью сигнала управления, что особенно важно, если ЭМК используется для регулирования расхода жидкого или газообразного рабочего тела.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. US 6249418 B1 SYSTEM FOR CONTROL OF AN ELECTROMAGNETIC ACTUATOR. Date of Patent: Jun. 19, 2001.
2. EP 0882303 B1 SOLENOID DRIVER AND METHOD FOR DETERMINING SOLENOID OPERATIONAL STATUS 21.04.2004 Bulletin 2004/17.
3. US 10,161,339 B2 DRIVE DEVICE FOR FUEL INJECTION. Date of Patent: Dec. 25,2018.
4. US 010605190 B2 INJECTION CONTROL UNIT. Date of Patent: Mar. 31, 2020.
5. US 8,681,468 B2 METHOD OF CONTROLLING SOLENOID VALVE. Date of Patent: Mar. 25, 2014.
6. RU 2756292 C1 СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ КЛАПАНОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ. 29.09.2021. Бюл. №28.
7. PIC16(L)F 1777/8/9 28/40/44-Pin, 8-Bit Flash Microcontroller [Электронный ресурс] //
URL: https://wwl.microchip.com/downloads/en/DeviceDoc/PIC16(L)F1777_8_9_Family_Data _Sheet_40001819D.pdf (дата обращения 20.01.2022).
8. [Электронный ресурс] // URL: https//www/Infineon.com/dgdl/auisp7221t.pdf (дата обращения 20.01.2022).
9. [Электронный ресурс] // URL: Infineon-IRLR2905-DataSheet-v01_01-EN.pdf https://www.infineon.com/dgdl/Infineon-IRLR2905-DataSheet-v01_01-EN.pdf?fileId=5546d462533600a40153566cc2bb2679 (дата обращения 20.01.2022).
10. [Электронный ресурс] // URL: MCP6V01/2/3 300 μA, Auto-Zeroed Op Amps https://wwl.microchip.com/downloads/en/DeviceDoc/22058c.pdf (дата обращения 20.01.2022).
11. RU 2746964 С1 СПОСОБ ДИАГНОСТИКИ СОСТОЯНИЯ ЯКОРЯ ЭЛЕКТРОМАГНИТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ. 22.04.2021. Бюл. №12.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ МОНИТОРИНГА ДАВЛЕНИЯ НА ВХОДЕ ГАЗОВОГО ЭЛЕКТРОМАГНИТНОГО КЛАПАНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2024 |
|
RU2832565C1 |
| СПОСОБ МОНИТОРИНГА ДАВЛЕНИЯ НА ВХОДЕ ГАЗОВОГО ЭЛЕКТРОМАГНИТНОГО КЛАПАНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2023 |
|
RU2802294C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЯКОРЯ ЭЛЕКТРОМАГНИТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2022 |
|
RU2793305C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЯКОРЯ ЭЛЕКТРОМАГНИТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2023 |
|
RU2802271C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЯКОРЯ ЭЛЕКТРОМАГНИТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2746039C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ КЛАПАНОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2756292C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ КЛАПАНОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2022 |
|
RU2795208C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЯКОРЯ ЭЛЕКТРОМАГНИТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2747003C1 |
| СПОСОБ ДИАГНОСТИКИ СОСТОЯНИЯ ЯКОРЯ ЭЛЕКТРОМАГНИТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2746964C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЯКОРЯ ЭЛЕКТРОМАГНИТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2717952C1 |

Изобретение относится к электротехнике и может быть использовано для управления электромагнитными клапанами (ЭМК). Технический результат заключается в расширении диапазона и повышении точности регулирования времени включенного состояния ЭМК. Для управления ЭМК используется полумостовая схема управления, особенности которой влияют на свойства предлагаемого способа. Момент окончания движения якоря электромагнита в процессе срабатывания определяют при достижении локального минимума тока в обмотке электромагнита клапана при срабатывании, после чего отключают его обмотку от положительного вывода источника питания, размыкая верхний ключ. А при достижении током нижнего порогового значения, если к этому моменту не поступает сигнал на отключение клапана, замыкают верхний ключ, подключая обмотку электромагнита к положительному выводу источника питания, обеспечивая увеличение тока в обмотке. Когда ток в обмотке достигает верхнего порогового значения, опять размыкают верхний ключ. Причем замыкание верхнего ключа при достижении нижнего порогового значения тока и размыкание его при достижении его верхнего порогового значения производят до тех пор, пока не поступает сигнал на отключение клапана. А при поступлении сигнала на отключение клапана размыкают верхний ключ, если он был замкнут в момент поступления сигнала на отключение клапана, а затем с некоторой задержкой размыкают нижний ключ, обеспечивая равенство времени срабатывания и времени отпускания клапана. Для реализации заявляемого способа предложена функциональная схема устройства, особенность построения которой состоит в том, что ее основная часть, обеспечивающая обработку сигналов измерения тока в обмотке электромагнита клапана и формирование сигналов управления, выполнена с использованием ресурсов микроконтроллера и его внутренних периферийных модулей. 2 н. и 6 з.п. ф-лы, 7 ил.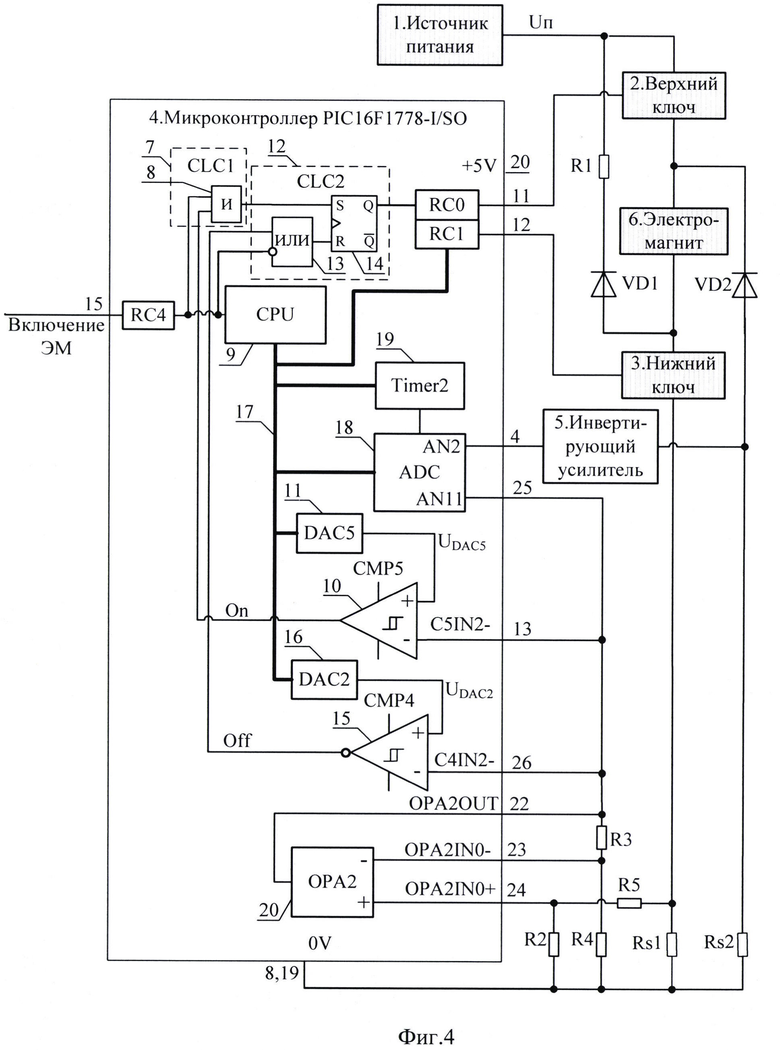
1. Способ управления электромагнитным клапаном при использовании полумостовой схемы управления, включающий подачу напряжения на обмотку электромагнита путем замыкания обоих ключей для обеспечения срабатывания клапана, мониторинг текущего значения тока в обмотке электромагнита, снятие напряжения с обмотки электромагнита, определение момента достижения якорем электромагнита конечного положения при отпускании при достижении локального максимума тока в обмотке электромагнита клапана в процессе отпускания, определение времени включенного состояния клапана и управление временем включенного состояния клапана, причем, снятие напряжения с обмотки электромагнита для обеспечения отпускания клапана производится путем размыкания обоих ключей в два этапа: сначала отключают обмотку электромагнита от положительного вывода источника питания, размыкая верхний ключ и формируя цепь медленной рекуперации магнитной энергии электромагнита, при которой эта накопленная энергия выделяется в виде тепла на активном сопротивлении этой цепи, а затем отключают обмотку электромагнита от отрицательного вывода источника питания, размыкая нижний ключ и формируя цепь быстрой рекуперации магнитной энергии, при которой эта накопленная энергия возвращается в источник питания, отличающийся тем, что момент окончания движения якоря электромагнита в процессе срабатывания определяют при достижении локального минимума тока в обмотке электромагнита клапана при срабатывании, после чего отключают его обмотку от положительного вывода источника питания, размыкая верхний ключ, а при достижении током нижнего порогового значения, если к этому моменту не поступает сигнал на отключение клапана, замыкают верхний ключ, подключая обмотку электромагнита к положительному выводу источника питания, обеспечивая увеличение тока в обмотке, и, когда ток в обмотке достигает верхнего порогового значения, опять размыкают верхний ключ, причем замыкание верхнего ключа при достижении нижнего порогового значения тока и размыкание его при достижении его верхнего порогового значения производят до тех пор, пока не поступает сигнал на отключение клапана, а при поступлении сигнала на отключение клапана размыкают верхний ключ, если он был замкнут в момент поступления сигнала на отключение клапана, а затем с некоторой задержкой размыкают нижний ключ, обеспечивая равенство времени срабатывания и времени отпускания клапана, причем, время включенного состояния клапана определяют как отрезок времени от момента окончания движения якоря электромагнита при срабатывании до момента достижения якорем электромагнита конечного положения при отпускании.
2. Способ управления электромагнитным клапаном по п. 1, отличающийся тем, что проверку достижения локального минимума тока в обмотке электромагнита клапана при срабатывании осуществляют после достижения локального максимума, например, путем сравнения текущего измеренного значения тока в обмотке с предыдущим, и если для последовательных измерений тока в обмотке текущее измеренное значение больше предыдущего, то считают, что локальный минимум тока достигнут.
3. Способ управления электромагнитным клапаном по п. 1, отличающийся тем, что верхнее пороговое значение тока в обмотке электромагнита клапана от момента получения команды на включение электромагнита до момента определения его срабатывания принимают равным 1,25 локального максимума тока в обмотке электромагнита клапана при срабатывании, а после срабатывания электромагнита верхнее пороговое значение тока принимают равным величине локального минимума на этом участке.
4. Способ управления электромагнитным клапаном по п. 1, отличающийся тем, что нижнее пороговое значение тока в обмотке электромагнита клапана принимают равным 1,25 значения тока отпускания, полученного при проведении лабораторных или заводских испытаний электромагнитного клапана при замкнутом нижнем и разомкнутом верхнем ключах.
5. Способ управления электромагнитным клапаном по п. 1, отличающийся тем, что момент времени размыкания нижнего ключа при отпускании выбирается при выполнении неравенства

где  - интервал времени (задержка) между моментом размыкания верхнего ключа и моментом размыкания нижнего ключа;
- интервал времени (задержка) между моментом размыкания верхнего ключа и моментом размыкания нижнего ключа;
TON - измеренное значение времени включения клапана в текущем рабочем цикле (значение интервала времени от момента подачи напряжения на обмотку электромагнита до окончания движения якоря электромагнита при срабатывании);
Т2 - расчетная величина интервала времени от момента размыкания нижнего ключа до окончания движения якоря электромагнита при выключении клапана, текущее значение которой в каждый момент времени t после поступления команды на выключение клапана определяется соотношением

где I(t) - текущее значение тока в обмотке электромагнита клапана;
С0, С1, С2 - постоянные коэффициенты, определяемые, например, методом наименьших квадратов при аппроксимации экспериментальной зависимости значений интервала времени от момента размыкания нижнего ключа до окончания движения якоря электромагнита при выключении клапана от текущего значения тока в обмотке электромагнита клапана в момент выключения нижнего ключа.
6. Способ управления электромагнитным клапаном по п. 5, отличающийся тем, что при цифровой реализации во время испытаний в лабораторных или заводских условиях формируют и сохраняют таблицу, содержащую полное множество возможных дискретных значений интервала времени от момента размыкания нижнего ключа до окончания движения якоря электромагнита, соответствующих каждому возможному текущему дискретному значению тока в обмотке электромагнита, причем эту таблицу рассчитывают по аппроксимирующей зависимости для всего конечного множества допустимых значений дискретных отсчетов тока в обмотке электромагнита, которые он может принимать при выключении клапана, затем эту таблицу используют в процессе эксплуатации для определения по текущему дискретному значению тока в обмотке электромагнита расчетной величины интервала времени от момента размыкания нижнего ключа до окончания движения якоря электромагнита при выключении клапана.
7. Устройство для управления электромагнитным клапаном, содержащее источник питания, верхний ключ, нижний ключ, первый резистор, первый и второй диоды, первый и второй измерительные резисторы, микроконтроллер PIC16F1778-I/SO и инвертирующий усилитель, вход которого соединен с анодом второго диода и первым выводом второго измерительного резистора, второй вывод которого соединен со вторым выводом первого измерительного резистора и с отрицательным выводом источника питания, с которым также соединены выводы 8 и 19 микроконтроллера, вывод 15 которого соединен с дискретным выходом системы верхнего уровня, вход верхнего ключа соединен с положительным выводом источника питания, а его выход с катодом второго диода и первым выводом электромагнита клапана, второй вывод которого соединен с входом нижнего ключа и анодом первого диода, выводы 11 и 12 микроконтроллера соединены с управляющими входами соответственно верхнего и нижнего ключей, катод первого диода соединен с первым выводом первого резистора, второй вывод которого соединен с положительным выводом источника питания, выход нижнего ключа соединен с первым выводом первого измерительного резистора, отличающееся тем, что в него дополнительно введены второй, третий, четвертый и пятый резисторы, причем, выход инвертирующего усилителя соединен с выводом 4 микроконтроллера, первый вывод третьего резистора соединен с выводами 13, 22, 25 и 26 микроконтроллера, с выводом 24 которого соединены первые выводы второго и пятого резисторов, вторые выводы второго и четвертого резисторов соединены с отрицательным выводом источника питания, второй вывод третьего резистора соединен с первым выводом четвертого резистора и выводом 23 микроконтроллера, а второй вывод пятого резистора соединен с выходом нижнего ключа.
8. Устройство для управления электромагнитным клапаном по п. 7, отличающееся тем, что внутренние периферийные модули микроконтроллера задействованы и сконфигурированы так, что конфигурируемая логическая ячейка CLC1 используется в качестве логического элемента «И», первый вход которого соединен с разрядом «RC4» регистра порта ввода/вывода PORTC, соединенным также с модулем центрального процессора CPU и выводом 15 микроконтроллера, настроенным как цифровой вход порта ввода/вывода PORTC, второй вход логического элемента «И» соединен с выходом компаратора СМР5, неинвертирующий вход которого соединен с выходом цифро-аналогового преобразователя DAC5, а инвертирующий вход компаратора СМР5 соединен с выводом 13 микроконтроллера, настроенным как аналоговый вход порта ввода/вывода PORTC, конфигурируемая логическая ячейка CLC2 используется в качестве последовательно соединенных элемента «ИЛИ» и RS-триггера, вход установки «S» которого соединен с выходом логического элемента «И», а вход сброса «R» соединен с выходом элемента «ИЛИ», прямой вход которого соединен с инверсным выходом компаратора СМР4, а инверсный вход - с разрядом «RC4» регистра порта ввода/вывода PORTC, неинвертирующий вход компаратора СМР4 соединен с выходом цифроаналогового преобразователя DAC2, а инвертирующий вход компаратора СМР4 соединен с выводом 26 микроконтроллера, настроенным как аналоговый вход порта ввода/вывода PORTC, прямой выход «Q» RS-триггера соединен с разрядом «RC0» регистра порта ввода/вывода PORTC, соединенным также с выводом 11 микроконтроллера, настроенным как цифровой выход порта ввода/вывода PORTC, разряд «RC1» регистра порта ввода/вывода PORTC, соединенный с двунаправленной шиной, соединен также с выводом 12 микроконтроллера, настроенным как цифровой выход порта ввода/вывода PORTC, первый вход «AN2» аналого-цифрового преобразователя ADC соединен с выводом 4 микроконтроллера, настроенным как аналоговый вход порта ввода/вывода PORTA, а второй вход «AN11» аналого-цифрового преобразователя ADC соединен с выводом 25 микроконтроллера, настроенным как аналоговый вход порта ввода/вывода PORTB, выход таймера Timer2 соединен с входом триггера автозапуска аналого-цифрового преобразователя ADC, неинвертирующий вход операционного усилителя ОРА2 соединен с выводом 24 микроконтроллера, настроенным как аналоговый вход порта ввода/вывода PORTB, инвертирующий вход операционного усилителя ОРА2 соединен с выводом 23 микроконтроллера, настроенным как аналоговый вход порта ввода/вывода PORTB, а выход операционного усилителя ОРА2 соединен с выводом 22 микроконтроллера, настроенным как аналоговый выход порта ввода/вывода PORTB, причем, модуль центрального процессора CPU, таймер Timer2, аналого-цифровой преобразователь ADC и цифро-аналоговые преобразователи DAC2 и DAC5 соединены также с двунаправленной шиной.
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ КЛАПАНОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2756292C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЯКОРЯ ЭЛЕКТРОМАГНИТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2717952C1 |
| US 8681468 B2, 25.03.2014 | |||
| US 10605190 B2, 31.03.2020 | |||
| US 10161339 B2, 25.12.2018. | |||

