Изобретение относится к средствам управления электрическими ракетными двигателями (ЭРД), в частности высокочастотными (ВЧ) ионными двигателями с индукционным возбуждением разряда в газоразрядной камере. Система управления ЭРД может использоваться в составе двигательной установки (ДУ) на борту космического аппарата (КА).
Для управления работой ЭРД и поддержания заданных тяговых характеристик ЭРД с индукционным возбуждением электрического разряда применяются системы управления, обеспечивающие требуемые параметры ВЧ разряда в процессе длительной работы двигателя. Известна система управления ионным источником (двигателем), описанная в патенте RU 2461908 C2 (опубликован 20.09.2012). Система содержит устройство для ввода энергии в газоразрядную камеру с индуктивным или индуктивно-емкостным возбуждением ВЧ разряда, ВЧ генератор и электрическую цепь связи ВЧ генератора с устройством ввода энергии. ВЧ генератор включает контур автоматической подстройки частоты сигнала. Данное техническое решение обеспечивает автоматическое согласование сопротивления (импеданса) устройства ввода энергии с ВЧ генератором с учетом линии связи между ними. Устройство ввода энергии выполняется в виде индуктора, последовательно соединенного с конденсатором связи. Индуктор и конденсатор связи образуют последовательный колебательный контур. Контур автоподстройки частоты ВЧ сигнала соединен с выходом фазового детектора. На входы фазового детектора подаются сигналы, пропорциональные току и напряжению в колебательном контуре. Данное выполнение системы управления направлено на обеспечение эффективного ввода энергии в газоразрядную камеру двигателя.
Ионный двигатель включает в свой состав разрядную камеру, заполняемую рабочим газом, например ксеноном, через патрубок подвода газа. Стенки камеры выполняются из диэлектрического материала. С внешней стороны разрядной камеры установлен индуктор, с помощью которого осуществляется ввод ВЧ энергии в разрядный объем. За счет ввода электромагнитной энергии в разрядный объем происходит возбуждение индукционного ВЧ разряда и ионизация рабочего газа. Индуктор может быть выполнен в виде однослойной, многослойной или бифилярной обмотки. Извлечение сфокусированного ионного потока из разрядной камеры и ускорение ионов осуществляется с помощью ионно-оптической системы, содержащей два перфорированных электрода, каждый из которых выполнен в виде металлической решетки.
Используемая система управления ионного двигателя позволяет снизить фазовое расхождение по току и напряжению ВЧ сигнала в резонансном контуре. Принцип регулирования основан на непрерывном сравнении по фазе выходного синусоидального тока и напряжения и уменьшении их фазового расхождения путем автоматической подстройки ВЧ генератора на частоту резонансного контура. При синфазности тока и напряжения в резонансном контуре обеспечивается высокая эффективность ввода энергии в газоразрядную камеру за счет чисто активного сопротивления нагрузки контура.
Наиболее близким аналогом изобретения является система управления ионным двигателем, входящим в состав ДУ КА (Lebeda Anton, Lebeda Arnold. Radio Frequency Ion Thruster - Radio Frequency Generator, Power Supply, and High Voltage Converter. Электронный журнал «Труды МАИ». 2012. Выпуск №60. URL: http://www.mai.ru/science/trady/published.php?ID=35339). Известная система управления ЭРД с индукционным возбуждением электрического разряда в газоразрядной камере содержит устройство генерации ВЧ энергии, выходы которого соединены с устройством ввода энергии в газоразрядную камеру. В качестве устройства ввода энергии используется индуктор. Система содержит также следующие управляемые источники электропитания узлов и блоков ЭРД: источник электропитания нейтрализатора пространственного заряда ионного потока, источник электропитания ускоряющего электрода, отрицательный полюс которого подключен к ускоряющему электроду ионно-оптической системы двигателя, и источник электропитания эмиссионного электрода, положительный полюс которого подключен к эмиссионному электроду ионно-оптической системы. К источнику электропитания ВЧ генератора подключен блок управления током генерируемого ионного пучка, выполняющий функцию системы управления ДУ.
Устройство генерации ВЧ энергии включает в свой состав ВЧ генератор с устройством автоподстройки частоты сигнала, управляемый источник электропитания ВЧ генератора и электрическую цепь связи с индуктором. Принцип работы системы управления основан на регулировании параметров источников электропитания, влияющих на генерацию ионного потока с заданной величиной силы тока, определяющей величину реактивной тяги двигателя. Требуемая эффективность ввода ВЧ энергии в газоразрядную камеру двигателя обеспечивается за счет автоподстройки частоты сигнала на резонансную частоту контура, включающего ВЧ генератор, индуктор и электрическую цепь, связывающую ВЧ генератор с индуктором. Автоподстройка частоты сигнала необходима из-за изменения полного сопротивления нагрузки, возникающего в результате изменения параметров генерируемой в газоразрядной камере плазмы. Генерируемая плазма является эквивалентным элементом резонансного контура и влияет на резонансную частоту контура вследствие электромагнитного взаимодействия плазмы с индуктором.
Использование в составе ВЧ генератора устройства автоподстройки частоты сигнала позволяет согласовать собственную частоту резонансного контура с частотой возбуждаемого ВЧ сигнала и обеспечить работу ВЧ генератора на полностью активную нагрузку, включающую активные сопротивления электрических цепей и индуктора, а также активное сопротивление, вносимое газоразрядной плазмой. Под действием вводимой электромагнитной энергии в разрядном объеме возбуждается и поддерживается индукционный ВЧ разряд. Образующиеся в плазме ВЧ разряда ионы извлекаются и ускоряются с помощью электродов ионно-оптической системы, создавая реактивную тягу.
Используемый в составе системы управления ВЧ генератор с устройством автоподстройки частоты ВЧ сигнала имеет сложную многокаскадную структуру. При изменении режима работы двигателя известная система управления не обеспечивает одновременное регулирование мощности разряда и расход рабочего газа, подаваемого в газоразрядную камеру и нейтрализатор пространственного заряда ионного потока, в соответствии с расчетными регулировочными характеристиками. Взаимосвязанное регулирование параметров питания узлов и блоков ЭРД, наряду с автоподстройкой частоты ВЧ сигнала, необходимо для обеспечения широкого диапазона регулирования величины тяги двигателя при высокой эффективности использования рабочего тела, которая характеризуется величиной удельного импульса двигателя.
Объектом управления для известной системы является регулируемое по величине мощности устройство генерации ВЧ энергии с контуром автоподстройки частоты выходного ВЧ сигнала. Однако, вместе с рассогласованием по частоте резонансного контура, существуют и другие причины нарушения стабильности генерируемого ионного пучка и, соответственно, стабильности реактивной тяги. К числу таких причин относится возможное несоответствие вводимой в газоразрядную камеру ВЧ мощности и расхода рабочего газа, подаваемого в газоразрядную камеру и разрядную камеру нейтрализатора пространственного заряда ионного потока, расчетным значениям, которые определяется в рабочих точках регулировочной характеристики двигателя.
Кроме того, величина ионного тока может изменяться в процессе длительного функционирования ЭРД из-за эрозии электродов ионно-оптической системы, нестабильности характеристик систем электропитания и подачи рабочего газа, а также в результате действия внешних факторов, влияющих на концентрацию плазмы, являющейся активной нагрузкой резонансного контура. Известная система управления обеспечивает подстройку частоты сигнала под собственную частоту резонансного контура, но не позволяет согласованно регулировать параметры питания других узлов и блоков ЭРД в зависимости от режимов работы двигателя, включая нештатные ситуации. В частности, система управления не позволяет одновременно регулировать частоту и мощность сигнала в устройстве ввода энергии, а также расход газа, подаваемого в газоразрядную камеру и в камеру нейтрализатора. Согласованное регулирование перечисленных параметров необходимо как для выбора расчетной рабочей точки на регулировочной характеристике двигателя, так и для стабилизации тока ионного пучка и, соответственно, тяги двигателя (в соответствии с выбранной рабочей точкой регулировочной характеристики).
Изобретение направлено на исключение из системы управления ВЧ генератора со сложной многокаскадной схемой формирования ВЧ сигнала и обеспечение возможности согласованного одновременного регулирования частоты ВЧ сигнала, вводимой ВЧ мощности и расхода рабочего газа, подаваемого в газоразрядную камеру двигателя и разрядную камеру нейтрализатора пространственного заряда. Такое согласованное регулирование параметров необходимо для расширения диапазона регулирования тяги двигателя при выборе, согласно регулировочной характеристике двигателя, расчетных значений регулируемых параметров, при которых обеспечивается максимальная эффективность двигателя (максимальный удельный импульс) на рабочем режиме работы.
Решение перечисленных задач обеспечивает достижение технического результата, заключающегося в повышении эффективности ЭРД (увеличении удельного импульса ЭРД) при регулировании тяги, расширении диапазона регулирования тяги при обеспечении высокого уровня удельного импульса и повышении стабильности тяги двигателя за счет автоматического поддержания расчетных значений токов и напряжений в цепях питания узлов и блоков ЭРД в процессе его длительной эксплуатации.
Достижение указанного технического результата обеспечивается с помощью системы управления ЭРД с индукционным возбуждением электрического разряда в газоразрядной камере. Система управления содержит устройство генерации ВЧ энергии, выходы которого соединены через линию связи с устройством ввода энергии в газоразрядную камеру двигателя. Устройство ввода энергии выполняется в виде индуктора. В состав системы управления входит также источник электропитания нейтрализатора пространственного заряда ионного потока, источник электропитания ускоряющего электрода, отрицательный полюс которого подключен к ускоряющему электроду ионно-оптической системы двигателя, источник электропитания эмиссионного электрода, положительный полюс которого подключен к эмиссионному электроду ионно-оптической системы двигателя.
Согласно изобретению система управления включает в свой состав фазовый детектор в виде отдельного блока, датчики тока и напряжения, по меньшей мере, один регулятор расхода газа и, по меньшей мере, один источник электропитания регулятора расхода газа. Устройство генерации ВЧ энергии содержит микроконтроллер (процессор с периферийными устройствами), усилитель мощности ВЧ сигнала и источник электропитания усилителя мощности ВЧ сигнала. Микроконтроллер, представляющий собой систему на кристалле SoC (System-on-a-Chip), содержит аналого-цифровой преобразователь входных управляющих сигналов, цифроаналоговый преобразователь выходных сигналов и тактовый генератор сигнала с перестраиваемой частотой.
Датчики тока и напряжения включены в электрическую линию связи с индуктором, выходы датчиков тока и напряжения подключены к входам фазового детектора и к сигнальным входам микроконтроллера. Выход фазового детектора соединен с сигнальным входом микроконтроллера. Управляющие выходы микроконтроллера соединены с входами источника электропитания усилителя мощности ВЧ сигнала, усилителя мощности ВЧ сигнала, источника электропитания ускоряющего электрода, источника электропитания эмиссионного электрода, источника электропитания нейтрализатора и источника электропитания регулятора расхода газа.
При описанном составе системы управления ЭРД и связях между микроконтроллером и источниками электропитания узлов и блоков ЭРД исключается необходимость использования ВЧ генератора со сложной многокаскадной схемой и обеспечивается возможность согласованного изменения токов и напряжений в цепях питания сразу нескольких узлов и блоков ЭРД в соответствии с заранее заданными расчетными характеристиками. На выходе из микроконтроллера формируются меандровые сигналы заданной частоты, которая устанавливается согласно выбранному режиму работы ЭРД. Далее сформированный сигнал усиливается до заданного уровня мощности (амплитуды) и поступает в контур питания индуктора в виде усиленного ВЧ сигнала. Усиление мощности (амплитуды) сигнала до заданного уровня производится с помощью усилителя мощности ВЧ сигнала, коэффициент усиления которого изменяется с помощью источника электропитания усилителя мощности, управляемого сигналами, поступающим с выхода микроконтроллера.
Фазовая автоподстройка частоты ВЧ сигнала производится с помощью контура автоматического регулирования, включающего датчики тока и напряжения, фазовый детектор и процессор микроконтроллера, осуществляющий программно-регулируемое управление частотой встроенного тактового генератора для настройки контура индуктора в резонанс.
Управляющие выходы микроконтроллера подключены к управляемым источникам электропитания узлов и блоков ЭРД. Согласно изобретению выходы микроконтроллера подключены к источникам электропитания нейтрализатора пространственного заряда, регулятора расхода газа и электродов ионно-оптической системы. На сигнальные входы микроконтроллера поступает информация о текущих значениях тока и напряжении с датчиков тока и напряжения, включенных в электрическую линию связи с индуктором, и о фазовом рассогласовании тока и напряжения - с выхода фазового детектора.
Использование общего для всех узлов и блоков ЭРД управляющего процессора в составе микроконтроллера обеспечивает эффективный ввод ВЧ энергии в газоразрядную камеру двигателя и регулирование параметров электропитания регулятора расхода газа, нейтрализатора пространственного заряда и электродов ионно-оптической системы. Микроконтроллер осуществляет одновременное и взаимосвязанное регулирование параметров, влияющих на происходящие в газоразрядной камере процессы ионизации рабочего вещества (газа), извлечения и ускорения ионов рабочего вещества и нейтрализации пространственного заряда генерируемого ионного потока. Согласованное программное регулирование электрических параметров источников электропитания обеспечивает эффективное управление ЭРД как в штатных режимах работы (во всем диапазоне расчетных значений параметров), так и при нештатных ситуациях.
Для управления током ионного пучка и оперативного аварийного отключения источников электропитания электродов ионно-оптической системы при нештатных ситуациях, например при электрическом пробое межэлектродного зазора, система управления может включать в свой состав дополнительный датчик тока. Сигнальный выход датчика тока подключается к соответствующему входу микроконтроллера. В этом случае положительный полюс источника электропитания ускоряющего электрода и отрицательный полюс источника электропитания эмиссионного электрода соединяются с общим выводом системы электропитания через дополнительный датчик тока. По величине регистрируемого датчиком тока определяется ток ионного пучка. Если величина тока отличается от заданного значения, то по сигналам микроконтроллера синхронно изменяются мощность ВЧ сигнала, поступающего на индуктор, и расход рабочего газа, подаваемого в газоразрядную камеру и в нейтрализатор. В случае превышения порогового (предельного) значения тока рабочая ситуация рассматривается как межэлектродный пробой ионно-оптической системы и производится аварийное включение источников электропитания, подключенных к электродам.
Возможен вариант выполнения системы управления ЭРД с двумя дополнительными датчиками. В данном варианте выполнения системы управления положительный полюс источника электропитания ускоряющего электрода соединяется с общим выводом системы электропитания через первый дополнительный датчик тока, а отрицательный полюс источника электропитания эмиссионного электрода соединяется с общим выводом системы электропитания через второй дополнительный датчик тока. Выходы датчиков тока раздельно подключаются к сигнальным входам микроконтроллера. При использовании двух датчиков появляется возможность раздельной регистрации текущих значений токов в цепях эмиссионного и ускоряющего электродов. С помощью датчика тока, включенного в цепь ускоряющего электрода, регистрируется ток перехвата, по величине которого микроконтроллер регулирует напряжение, подаваемое на ускоряющий электрод. Такая возможность регулирования позволяет минимизировать величину тока перехвата в цепи ускоряющего электрода.
При использовании термоэмиссионного катода в составе нейтрализатора пространственного заряда ионного потока система управления содержит источник электропитания термоэмиссионного катода. В данном варианте реализации изобретения вход управления источника электропитания термоэмиссионного катода подключается к соответствующему выходу микроконтроллера.
Регулятор расхода газа предпочтительно выполняется в виде термодросселя, который подключается к источнику электропитания регулятора расхода газа. Выходной проточный канал термодросселя параллельно соединяется с газоразрядной камерой двигателя и нейтрализатором пространственного заряда ионного потока. За счет подбора диаметров трубопроводов и жиклеров обеспечивается предварительно устанавливаемое расчетное соотношение расходов газа через газоразрядную камеру и нейтрализатор пространственного заряда.
Для независимого регулирования расхода газа, подаваемого в газоразрядную камеру и в нейтрализатор пространственного заряда ионного потока, целесообразно включать в состав системы управления два регулятора расхода газа. Каждый регулятор выполняется в виде термодросселя с источником электропитания регулятора расхода. Первый термодроссель, выходной канал которого соединен с газоразрядной камерой двигателя, подключается к первому источнику электропитания регулятора расхода. Второй термодроссель, выходной канал которого соединен с нейтрализатором пространственного заряда ионного потока, подключается ко второму источнику электропитания регулятора расхода.
При работе ЭРД в составе двигательной установки микроконтроллер подключается через внешний интерфейс к системе управления двигательной установки или непосредственно к бортовому комплексу управления КА.
Далее изобретение поясняется описанием конкретных примеров выполнения системы управления ЭРД, работающего в составе двигательной установки КА.
На поясняющих чертежах изображено следующее:
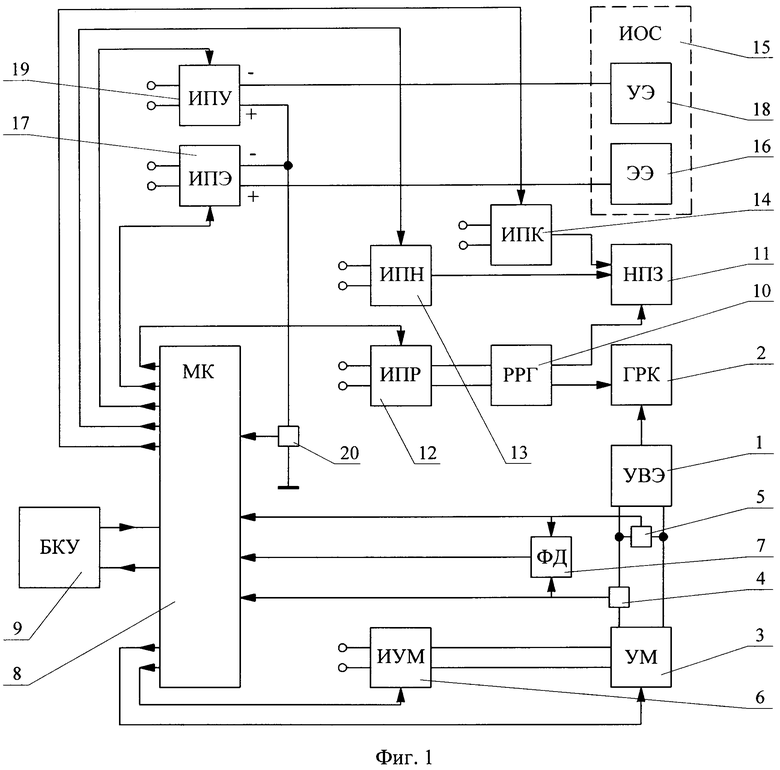
на фиг. 1 - структурная схема системы управления ЭРД при использовании одного регулятора расхода газа и одного дополнительного датчика тока;
на фиг. 2 - структурная схема системы управления ЭРД при использовании двух регуляторов расхода газа и двух дополнительных датчиков тока.
Система управления ЭРД, структурная схема которой изображена на фиг. 1 чертежей, включает в свой состав устройство ввода энергии (УВЭ) 1. УВЭ 1 выполнено в виде индуктора, имеющего спиралеобразную форму. Индуктор установлен с внешней стороны газоразрядной камеры (ГРК) 2, стенки которой выполнены из проницаемого для электромагнитного поля диэлектрического материала. Витки индуктора охватывают ГРК 2 и образуют спиральную намотку вокруг боковой поверхности камеры. Спиральная намотка повторяет пространственный объем ГРК 2 и может иметь различные формы: цилиндрическую, коническую, полусферическую либо комбинированную, включающую различные сопряженные поверхности.
УВЭ 1 подключено к усилителю мощности ВЧ сигнала (УМ) 3 через линию связи, в которую включен датчик тока 4 и датчик напряжения 5. УМ 3 выполнен по полумостовой схеме инвертора тока (см., например, Зиновьев Г.С. Основы силовой электроники: Учебник. - Новосибирск: Изд-во НГТУ, 2000. Ч. 2, стр. 76, рис. 2.2.13а). Управление выходными транзисторами осуществляется через скоростной драйвер, например, МАХ5064 ВАТС (125V/2A, High-Speed, Half-Bridge MOSFET Drivers, Maxim Integrated Products, 2007). В качестве выходных транзисторов для ЭРД мощностью ~500 Вт применяются транзисторы типа IRFS3806 (IRFB3806PbF IRFS3806PbF IRFSL3806PbF HEXFET® Power MOSFET, International Rectifier, 2008).
УМ 3 подключен к источнику электропитания усилителя мощности ВЧ сигнала (ИУМ) 6, который подключен к бортовой системе электропитания. ИУМ 6 выполняется в виде схемы понижающего преобразователя напряжения. Для диапазона мощностей до 500 Вт применяются драйвер и транзисторы, аналогичные используемым в схеме УМ 3.
Система управления содержит в качестве отдельного блока фазовый детектор (ФД) 7, с помощью которого определяется разность фаз сигналов тока и напряжения в резонансном контуре УВЭ 1. К входам ФД 7 подключены выходы датчика тока 4 и датчика напряжения 5.
Управляющим элементом устройства генерации ВЧ энергии, включающего УМ 3 и ИУМ 6, и всей системы управления ЭРД в целом является микроконтроллер (МК) 8. В качестве МК 8 используется микросхема типа C8051F568 (C8051F55x/56x/57x. Mixed Signal ISP Flash MCU Family. Silicon Laboratories. 2010. Rev. 1.0 3/10). В состав МК 8, как и любого микроконтроллера, входит процессор с периферийными устройствами. МК 8 содержит аналого-цифровой преобразователь входных управляющих сигналов, цифроаналоговый преобразователь выходных сигналов и встроенный тактовый RC-генератор, позволяющий программно изменять частоту сигнала. Микросхема выполнена с логическими входами и выходами общего назначения. К сигнальным входам МК 8. которые являются входами входящего в состав МК 8 аналого-цифрового преобразователя входных сигналов, подключены выходы ФД 7, датчика тока 4 и датчика напряжения 5. МК 8 подключен через внешний интерфейс к бортовому комплексу управления (БКУ) 9.
Система управления содержит регулятор расхода газа (РРГ) 10, обеспечивающий одновременную подачу рабочего газа с заданным расходом в ГРК 2 и в камеру нейтрализатора пространственного заряда ионного потока (НПЗ) 11. В качестве рабочего газа в рассматриваемом примере используется ксенон. РРГ 10 выполнен в виде управляемого термодросселя, подключенного к источнику электропитания регулятора расхода газа (ИПР) 12. ИПР 12 подключается к бортовой системе электропитания.
НПЗ 11 включает в свой состав термоэмиссионный катод (на чертеже не показан). Электропитание НПЗ 11 и термоэмиссионного катода осуществляется с помощью двух источников: источника электропитания нейтрализатора пространственного заряда ионного потока (ИПН) 13 и источника электропитания термоэмиссионного катода (ИПК) 14. ИПР 13 и ИПК 14 подключаются к бортовой системе электропитания.
ИПН 13 выполнен в виде источника тока по схеме повышающего преобразователя постоянного напряжения на MOSFET-транзисторах типа IRF4127S (см., например, Зиновьев Г.С. Основы силовой электроники: Учебник. - Новосибирск: Изд-во НГТУ, 2000. Ч. 2, стр. 21, рис. 1.2.1). ИПК 14 выполнен в виде источника тока по схеме понижающего преобразователя напряжения на MOSFET-транзисторах типа IRFS3806 (см., например, Зиновьев Г.С. Основы силовой электроники: Учебник. - Новосибирск: Изд-во НГТУ, 2000. Ч. 2, стр. 12, рис. 1.1.4а). Управление транзисторами в схемах источников ИПН 13 и ИПК 14 осуществляется собственными регуляторами типа TL494ID (TL494 Pulse-Width-Modulation Circuit, Texas Instruments, 2005) через драйверы типа IR2184S (IR2184/IR21844 HIGH AND LOW SIDE DRIVER, International Rectifier, 2000).
Система управления ЭРД включат в свой состав управляемые источники электропитания электродов ионно-оптической системы двигателя (ИОС) 15. Эмиссионный электрод (ЭЭ) 16 подключен к положительному полюсу источника электропитания эмиссионного электрода (ИПЭ) 17. Ускоряющий электрод (УЭ) 18 подключен к отрицательному полюсу источника электропитания ускоряющего электрода (ИПУ) 19. В варианте выполнения системы управления, изображенном на фиг. 1 чертежей, положительный полюс ИПУ 19 и отрицательный полюс ИПЭ 17 соединены с общим выводом системы электропитания через дополнительный датчик тока 20. Сигнальный выход датчика тока 20 подключен к соответствующему сигнальному входу МК 8. Источники ИПЭ 17 и ИПУ 19 подключаются к бортовой системе электропитания.
ИПУ 19 выполнен в виде источника напряжения с номинальной величиной напряжения ~300 В. ИПУ 19 имеет схему обратноходового преобразователя с трансформаторной развязкой на MOSFET-транзисторах типа IRF4127S (см., например, Зиновьев Г.С. Основы силовой электроники: Учебник. - Новосибирск: Изд-во НГТУ, 2000. Ч. 2, стр. 31, рис. 1.2.13).
ИПЭ 17 является основным потребителем мощности в системе электропитания ЭРД. Данный источник электропитания выполнен в виде источника напряжения по схеме с квазирезонансной нагрузкой (LLC converter) на MOSFET-транзисторах типа IRFS3806. Для управления транзисторами используется специальный контроллер типа UCC25600. Номинальная величина напряжения ИПЭ 17 составляет ~2000 В.
Управление перечисленными выше источниками электропитания осуществляется сигналами с широтно-импульсной модуляцией (ШИМ сигналами). Для этого управляющие выходы МК 8 подключены к входам управления блоков: УМ 3, ИУМ 6, ИПР 12, ИПН 13, ИПК 14, ИПЭ 17 и ИПУ 19.
Вариант выполнения системы управления ЭРД, структурная схема которой изображена на фиг. 2 чертежей, отличается от варианта выполнения системы управления, структурная схема которой изображена на фиг. 1 чертежей, наличием двух регуляторов расхода газа, выполненных в виде термодросселей. Данное выполнение обеспечивает эффективное использование рабочего газа для нейтрализации пространственного заряда ионного потока за счет точной регулировки расхода рабочего газа в процессе длительной эксплуатации ЭРД.
Первый регулятор расхода газа (РРГ1) 21, выходной газовый канал которого соединен с ГРК 2, подключен к первому источнику электропитания регулятора расхода газа (ИПР1) 22. Второй регулятор расхода газа (РРГ2) 23, выходной канал которого соединен с камерой НПЗ 11, подключен ко второму источнику электропитания регулятора расхода газа (ИПР2) 24. Оба источника ИПР1 22 и ИПР2 24 подключаются к бортовой системе электропитания.
Кроме того, в данном варианте выполнения системы управления реализовано раздельное подключение источников электропитания электродов ИПЭ 17 и ИПУ 19 к общему выводу системы электропитания двигателя через отдельные датчики тока. Положительный полюс ИПУ 19 соединен с общим выводом системы электропитания двигателя через первый дополнительный датчик тока 25. Отрицательный полюс ИПЭ 17 соединен с общим выводом системы электропитания двигателя через второй дополнительный датчик тока 26. С помощью датчиков тока 25 и 26 обеспечивается контроль текущих значений тока в цепях питания, подключенных к электродам ИОС 15.
Работа системы управления ЭРД, схема которой изображена на фиг. 1 чертежей, осуществляется следующим образом.
С помощью системы управления производится воздействие на исполнительные органы, которыми являются узлы и блоки ЭРД и их источники электропитания, в процессе штатной работы ЭРД и при возникновении аварийных ситуаций. По команде, поступающей из БКУ 9, происходит включение двигателя по определенной циклограмме. Выбор циклограммы запуска двигателя зависит от процесса инициации ВЧ разряда в ГРК 2. На практике применяются два варианта запуска двигателя. Первый вариант осуществляется в процессе поступления рабочего газа в ГРК 2. При малых давлениях рабочего газа инициация ВЧ разряда происходит при минимальных рабочих параметрах, характерных для левой части кривой Пашена. Второй вариант запуска двигателя осуществляется с использованием электронов, генерируемых в НПЗ 11, которые предварительно направляются в ГРК 2 с помощью ИОС 15.
При выборе первого варианта запуска двигателя одновременно включается питание УВЭ 1, НПЗ 11 и ИОС 15. Рабочий газ одновременно подается в ГРК 2 и НПЗ 11. При первичном включении ЭРД предусматривается предварительный вывод НПЗ 11 на расчетный режим работы. Для этого выполняется серия циклических включений НПЗ 11 с термоэмиссионным катодом с помощью ИПН 13 и ИПК 14, управляемых сигналами МК 8. Длительность данного процесса составляет десятки минут.
Инициация ВЧ разряда происходит при наличии достаточного количества свободных электронов в разрядном объеме ГРК 2. Вероятность запуска двигателя в этом случае зависит от вводимой в разрядный объем ВЧ мощности. Если в процессе нарастания давления рабочего газа в ГРК 2 соотношение рабочих параметров выходит за пределы минимума кривой Пашена (по правой ветви кривой Пашена) свободных электронов будет недостаточно для инициации ВЧ разряда. Кроме того, рассматриваемый вариант циклограммы не обеспечивает быстрый повторный запуск при отключении двигателя. Для повторного запуска двигателя в этом случае требуется снижение давления рабочего газа в ГРК 2.
При использовании второго варианта запуска двигателя инициация разряда происходит с помощью электронов, генерируемых в камере НПЗ 11. Для этого НПЗ 11 включается за 5÷10 минут до инициации ВЧ разряда, прогревается и выводится на рабочий режим работы. Предварительная подача рабочего газа в ГРК 2 и НПЗ 11 производится через управляемые электромагнитные клапаны (на чертежах не показаны). После заполнения газовых магистралей МК 8 формирует сигналы заданной частоты, которые передаются в УМ 3, и включается ИУМ 6. После завершения переходных процессов в контуре УВЭ 1 включается ИПЭ 17 и на ЭЭ 16 подается положительное напряжение. Вследствие созданной разности потенциалов электроны из НПЗ 11 направляются в ГРК 2. При этом поток электронов попадает не только в ГРК 2, но и на поверхность ЭЭ 16, разогревая электрод и создавая ток в цепи питания. Для защиты ЭЭ 16 от потока электронов через ~100 мс на УЭ 18 подается отрицательное напряжение Величина отрицательного напряжения, подаваемого на УЭ 18, составляет ~10% от величины положительного напряжения, подаваемого на ЭЭ 16. В результате действия приложенной разности потенциалов ограничивается дальнейшее поступление электронов в ГРК 2 и на ЭЭ 16. Выбранный интервал времени (~100 мс) между подачей положительного и запирающего отрицательного напряжения на электроды ИОС 15 обеспечивает устойчивое развитие ВЧ разряда в разрядном объеме ГРК 2.
Инициация и поддержание индукционного разряда в ГРК 2 производится путем ввода ВЧ энергии с помощью УВЭ 1, выполненного в виде индуктора. ВЧ энергия передается в разрядный объем через проницаемые для электромагнитного поля диэлектрические стенки ГРК 2. Мощность ВЧ разряда в рассматриваемом примере реализации изобретения составляет ~500 Вт. В результате инициации ВЧ индукционного разряда в ГРК 2 образуется газоразрядная плазма с расчетной концентрацией ионов, которая достаточна для создания реактивной тяги заданной величины. При работе ЭРД с индукционным возбуждением электрического разряда одновременно осуществляются процессы ионизации рабочего газа в ГРК 2, извлечения и ускорения ионов рабочего газа с помощью электродов ИОС 15 и нейтрализации пространственного заряда ионного потока с помощью НПЗ 11.
Извлечение и ускорение ионов происходит за счет разности потенциалов между газоразрядной плазмой, находящейся в ГРК 2, и электродами ИОС 15. На ЭЭ 16 подается напряжение +2000 В от ИПЭ 17. На УЭ 18 подается напряжение -300 В от ИПУ 19. Под действием приложенной разности потенциалов формируется направленный поток ионов рабочего газа.
Управление работой ИПУ 19 осуществляется ШИМ сигналом, поступающим с выхода МК 8. Стабилизация выходного напряжения ИПЭ 17 обеспечивается за счет изменения частоты преобразования относительно резонансной частоты нагрузки. Нагрузкой моста в ИПЭ 17 является последовательная цепь, включающая индуктивность, конденсатор и первичную обмотку повышающего трансформатора. К вторичной обмотке повышающего трансформатора подключен выпрямитель. Данная схема обеспечивает облегченные условия переключения и, как следствие, малые динамические потери транзисторов и диодов выпрямителя. Включение и выключение ИПЭ 17 осуществляется по управляющим сигналам, поступающим с выхода МК 8.
Свободное истечение направленного ионного потока в окружающее пространство производится за счет нейтрализации пространственного заряда ионов потоком электронов, генерируемым НПЗ 11. Для инициации разряда НПЗ 11 включает в свой состав термоэмиссионный катод. При зажигании электрического разряда в разрядной камере НПЗ 11 предварительно производится включение термоэмиссионного катода. Термоэлектронная эмиссия происходит при нагреве катода с помощью источника тока ИПК 14. Электропитание остальных элементов НПЗ 11 производится от источника тока ИПН 13. ИПК 14 включается по управляющему сигналу МК 8 на короткий промежуток времени. После зажигания газового разряда ИПК 14 выключается по управляющему сигналу МК 8.
На выходе из камеры НПЗ 11 формируется направленный поток электронов, инжектируемый в ионный поток за электродами ИОС 15. Концентрация электронов поддерживается достаточной для компенсации пространственного заряда ионов. Требуемая концентрация электронов обеспечивается за счет подачи в НПЗ 11 расчетного количества рабочего газа через газовую магистраль, соединенную с выходом РРГ 10. Расход рабочего газа через данную магистраль выбран в рассматриваемом примере реализации изобретения равным ~10% от расхода газа через параллельно подключенную магистраль питания ГРК 2.
Перед включением источников электропитания ГРК 2 и камера НПЗ 11 предварительно заполняются рабочим газом (ксеноном). Подача газа в ГРК 2 и НПЗ 11 производится через регулятор РРГ 10, выполненный в виде управляемого термодросселя. Из выходного канала термодросселя рабочий газ подается по параллельным магистралям в ГРК 2 и НПЗ 11. Соотношение расходов газа между ГРК 2 и НПЗ 11 в рассматриваемом варианте системы управления (см. фиг. 1 чертежей) устанавливается заранее и не регулируется в процессе работы ЭРД.
Управление режимами работы источников электропитания (ИУМ 6, ИПР 12, ИПН 13, ИПК 14, ИПЭ 17 и ИПУ 19) и органами управления УМ 3 происходит по управляющим ШИМ сигналам, поступающим с выходов МК 8. Информация о текущих значениях тока и напряжения в цепях питания УВЭ 1 и электродов ИОС 15 поступает на сигнальные входы МК 8 с датчиков тока 4 и 20, датчика напряжения 5 и ФД 7. Обмен информацией между МК 8 и БКУ 9 производится через внешний интерфейс, через который в БКУ 9 передается телеметрическая информация о работе ЭРД. Управляющие команды на включение и выключение ЭРД поступают из БКУ 9 в МК 8 также через внешний интерфейс.
ВЧ сигнал первоначально формируется в виде меандрового сигнала, генерируемого в МК 8. Далее сформированный сигнал усиливается в УМ 3 до расчетного уровня мощности (амплитуды) и передается через линию связи в УВЭ 1. С помощью УВЭ 1 осуществляется ввод электромагнитной энергии в разрядный объем ГРК 2, заполненный рабочим газом. Регулировка мощности ВЧ сигнала в УМ 3 производится путем изменения напряжения питания с помощью источника ИУМ 6, который управляется ШИМ сигналами, формируемыми в МК 8.
В процессе работы ЭРД происходит изменение электрических характеристик газоразрядной плазмы в ГРК 2, например, из-за колебаний расхода рабочего газа, подаваемого в ГРК 2 и НПЗ 1, изменения характеристик источников электропитания и/или изменения внешних условий. Вследствие влияния внутренних и внешних факторов изменяется концентрация заряженных частиц в газоразрядной плазме и, следовательно, изменяется импеданс нагрузки в контуре УВЭ 1. Из-за этого нарушается условие резонанса контура электропитания, что связано с разностью фаз между сигналами тока и напряжения в контуре УВЭ 1. Подстройка частоты ВЧ сигнала при изменении характеристик нагрузки, представляющей собой газоразрядную плазму, производится автоматически с помощью встроенного в МК 8 тактового генератора. Данный генератор позволяет программно перестраивать (изменять) частоту генерируемого сигнала.
Информация о рассогласовании фаз тока и напряжения в цепи электропитания УВЭ 1 поступает с датчика тока 4, датчика напряжения 5 и ФД 7. С помощью ФД 7, входы которого подключены к датчикам 4 и 5, определяется текущая разность фаз сигналов тока и напряжения в резонансном контуре. Оцифрованные параметры обрабатываются в МК 8. В соответствии с заданной программой для выбранного режима работы ЭРД в МК 8 происходит изменение частоты тактового RC-генератора, формирующего меандровые сигналы. Генерируемые сигналы усиливаются до заданного уровня мощности в УМ 3 и передаются через линию связи в УВЭ 1. В результате автоматической подстройки частоты ВЧ сигнала контур УВЭ 1 настраивается в резонанс, что обеспечивает эффективную передачу энергии из УВЭ 1 в разрядный объем ГРК 2.
Одновременно с автоподстройкой частоты ВЧ сигнала МК 8 обеспечивает взаимосвязанное управление узлами и блоками ЭРД в соответствии с программой, учитывающей взаимную связь параметров процессов ионизации рабочего газа, ускорения ионов и нейтрализации пространственного заряда ионного потока. Заданные значения тяги двигателя и стабилизация тока ионного пучка, определяющего величину тяги, обеспечиваются за счет одновременной автоматической подстройки мощности ВЧ сигнала и расхода рабочего газа, подаваемого в ГРК 2 и НПЗ 11.
Мощность ВЧ сигнала и расход газа регулируются с помощью блоков питания ИУМ 6 и ИПР 12, в которых управляющие сигналы, поступающие с выходов МК 8, преобразуются в значения тока и напряжения в контурах УВЭ 1 и РРГ 10. Критерием регулирования в штатном режиме работы ЭРД является поддержание расчетного значения тока ионного пучка. Данное значение (рабочая точка) характеризуется оптимальным соотношением расхода рабочего газа и мощности ВЧ сигнала. Значения данных рабочих параметров рассчитываются с помощью процессора, входящего в состав МК 8. В соответствии с алгоритмом расчета значения рабочих параметров выбираются в зависимости от текущего значения тока ионного пучка на основании регулировочных характеристик конкретного ЭРД (см., например, Важенин Н.А., Обухов В.А., Плохих А.П., Попов Г.А. Электрические ракетные двигатели космических аппаратов и их влияние на радиосистемы космической связи. М. ФИЗМАТЛИТ, 2013, стр. 89, рис. 2.28).
Таким образом, с помощью МК 8 одновременно осуществляется автоподстройка частоты ВЧ сигнала и автоматическое программно-расчетное регулирование мощности ВЧ сигнала и расхода рабочего газа, подаваемого в ГРК 2 и НПЗ 11. Согласованное регулирование в каждый текущий момент времени сразу нескольких рабочих параметров позволяет регулировать величину тяги в широком диапазоне значений. При этом в процессе регулирования тяги поддерживаются расчетные значения рабочих параметров в соответствии с регулировочной характеристикой ЭРД.
Регулирование тяги обеспечивается за счет управления токами и напряжениями в цепях питания узлов и блоков ЭРД на основании предварительно полученных расчетных данных (регулировочных характеристик ЭРД), которые хранятся в элементах памяти (постоянном запоминающем устройстве) микросхемы МК 8 и используются для формирования управляющих сигналов. Кроме того, с помощью микроконтроллера обеспечивается стабилизация величины тяги двигателя за счет поддержания заданного значения тока ионного пучка при рабочих параметрах, соответствующих выбранной рабочей точке регулировочной характеристики ЭРД.
В процессе работы ЭРД с помощью системы управления осуществляется защита источников электропитания ИПЭ 17 и ИПУ 19 от короткого замыкания, которое может возникнуть при пробое межэлектродного промежутка электродов ИОС 15. Для этого используются контуры защиты и стабилизации с дополнительным датчиком тока 20, через который положительный полюс ИПУ 19 и отрицательный полюс ИПЭ 17 соединены с общим выводом системы электропитания ЭРД. Текущее значение тока в контурах защиты и стабилизации фиксируется датчиком тока 20. Информация о величине тока передается в МК 8, в котором происходит программная обработка полученных данных и формирование управляющего сигнала на временное отключение ИПЭ 17 и ИПУ 19 от электродов ИОС 15.
По информации, поступающей с датчика тока 20, МК 8 оценивает временные интервалы снижения величины тока в электрической цепи. В случае снижения величины тока ниже порогового значения и/или его отсутствии в течение заданного (предельного) интервала времени производится перезапуск системы и повторное выполнение циклограммы включения ЭРД. При работе ЭРД на малых расходах рабочего газа в случае снижения тока ионного пучка ниже порогового значения для сохранения работоспособности двигателя происходит снижение напряжения питания ЭЭ 16 по управляющему сигналу МК 8. Данная операция выполняется с целью предотвращения возможных электрических пробоев, возникающих при относительно низком давления рабочего газа в магистралях между изолированными проводящими элементами системы подачи рабочего газа.
По величине тока, регистрируемой датчиком 20, определяется текущее значение тока ионного пучка. Если измеренное значение тока отличается от расчетного значения, МК 8 передает управляющий сигнал в УМ 3 для изменения мощности сигнала в контуре УВЭ 1. За счет увеличения или уменьшения вводимой в ГРК 2 ВЧ мощности соответствующим образом изменяется концентрация заряженных частиц в разрядном объеме, что, в свою очередь, влияет на изменение тока ионного пучка и тягу двигателя. Одновременно с изменением ВЧ мощности МК 8 обеспечивает программно-расчетное регулирование расхода рабочего газа, подаваемого в ГРК 2 и НПЗ 11 для достижения требуемых значений, соответствующих выбранной рабочей точке регулировочной характеристики. Взаимосвязанное изменение ВЧ мощности и расхода рабочего газа позволяет расширить диапазон регулирования тяги двигателя при высокой эффективности использования рабочего газа.
При нештатном выключении ЭРД, сопровождающемся прекращением генерации направленного ионного потока, система управления производит перезапуск двигателя в автоматическом режиме с учетом значений токов и напряжений перед выключением двигателя. В случае возникновения межэлектродных пробоев в цепи датчика 20 возникают пульсации тока. Регистрируемая датчиком 20 информация передается в МК 8, в котором происходит программная обработка данных и формируются, в случае необходимости, управляющие сигналы на отключение источников электропитания ИПЭ 17 и ИПУ 19. При этом все остальные узлы и блоки ЭРД, включая ИУМ 6 и УМ 3, остаются в рабочем состоянии. После этого двигатель переходит в предстартовое состояние.
При повторном запуске двигателя подается положительное напряжение на ЭЭ 16, и электроны из НПЗ 11 под действием приложенной разности потенциалов направляются в ГРК 2, в которой происходит инициация ВЧ разряда. Через интервал времени длительностью не более 100 мс подается отрицательное напряжение на УЭ 18. После этого заканчивается процедура запуска и двигатель переходит в рабочий режим. В случае если разряд в ГРК 2 не погас на момент повторного запуска, то напряжение на электроды ИОС 15 подается одновременно.
Важным параметром, определяющим циклограмму запуска двигателя, является состояние рабочего вещества в ГРК 2: «разряд горит» либо «разряд не горит». Состояние рабочего вещества определяется по величинам напряжения и тока, которые регистрируются датчиками 4 и 5 в контуре УВЭ 1. Информация с датчиков 4 и 5 передается в МК 8 для последующей обработки.
При отсутствии разряда в ГРК 2 («холостой» режим) в контуре УВЭ 1 устанавливаются номинальные значения тока и напряжения. После инициации ВЧ разряда («разряд горит») в контуре УВЭ 1 появляется дополнительная активная нагрузка. В результате ток увеличивается, а напряжение падает. Изменение тока и напряжения в контуре УВЭ 1 регистрируется датчиками 4 и 5. На основании информации, полученной с выходов датчиков 4 и 5, МК 8 определяет текущее состояние процесса в ГРК 2 как «разряд горит». При погасании разряда в ГРК 2 по аналогичным критериям МК 8 определяет текущее состояние как «разряд не горит».
На основании информации о процессах в ГРК 2 с помощью МК 8 выбирается оптимальная циклограмма запуска двигателя после его отключения. Например, может быть осуществлена многократная процедура кратковременного отключения отрицательного напряжения, подаваемого на УЭ 18, для ввода дополнительных потоков электронов из НПЗ 11 в ГРК 2. В случае отключения питания электродов ИОС 15 при возникновении пробоев между ЭЭ 16 и УЭ 18 и определении состояния процессов в ГРК 2 как «разряд горит» МК 8 формирует управляющий сигнал для повторной одновременной подачи напряжения на электроды от источников питания ИПЭ 17 и ИПУ 19.
Работа второго варианта выполнения системы управления (см. фиг. 2 чертежей) осуществляется аналогичным образом. Отличия работы рассматриваемого варианта системы управления связаны с использованием двух регуляторов расхода РРГ1 21 и РРГ2 23 с источниками питания ИПР1 22 и ИПР2 24 и двух независимых контуров с дополнительными датчиками тока 25 и 26.
При использовании двух регуляторов расхода газа МК 8 формирует управляющие сигналы, обеспечивающие раздельное регулирование расхода рабочего газа, поступающего в ГРК 2 и в камеру НПЗ 11. Вследствие независимого регулирования расхода газа в двух параллельных магистралях производится точная подстройка расхода газа, определяющего расчетную величину концентрации электронов, компенсирующих пространственный заряд ионного потока. Необходимость в раздельном регулировании расхода рабочего газа, поступающего в ГРК 2 и НПЗ 11, возникает в случае отклонения предварительно рассчитанного соотношения от текущего оптимального соотношения расходов газа через ГРК 2 и НПЗ 11. Такая ситуация возникает при глубоком регулировании тяги, когда рабочие параметры изменяются в пределах всей регулировочной характеристики двигателя.
При отклонении соотношения расходов газа от оптимального значения концентрация электронов оказывается недостаточной либо она превышает расчетное значение, соответствующее условию полной компенсации (нейтрализации) пространственного заряда ионного потока. Вследствие отклонения соотношения расходов от оптимального значения в цепях электродов ЭЭ 16 и УЭ 18 возникают колебания тока, регистрируемые датчиками тока 25 и 26. С помощью датчиков 25 и 26 осуществляется раздельное измерение токов в цепях питания электродов ИОС 15. Измеренные текущие значения токов передаются в МК 8. Поступающая информация программно обрабатывается и формируются управляющие сигналы, направляемые в источники электропитания ИПР1 22 и ИПР2 24.
За счет изменения режимов электропитания термодросселей изменяется соотношение расходов газа через ГРК 2 и НПЗ 11 до достижения расчетного значения, оптимального для текущего режима работы ЭРД. Применение параллельно включенных регуляторов РРГ1 21 и РРГ2 23, которые независимо управляются сигналами МК 8, позволяет повысить точность стабилизации ионного тока и эффективность использования рабочего газа. В результате дополнительно увеличивается диапазон регулирования тяги при требуемом уровне эффективности использования рабочего газа и повышается стабильность тяги двигателя.
При использовании двух дополнительных датчиков тока 25 и 26, независимо подключенных в цепи питания электродов ИОС 15, появляется возможность минимизировать ток перехвата, протекающий через цепь питания УЭ 18. С помощью датчика тока 25, включенного в контур между положительным полюсом ИПУ 19 и общим выводом системы электропитания ЭРД, регистрируются текущие значения тока в цепи питания УЭ 18. МК 8 программно обрабатывает информацию о величине тока и вычисляет текущее значение производной тока по времени в контуре питания. На основании расчетных данных в МК 8 формируется сигнал, управляющий работой ИПУ 19. Программно-расчетное изменение напряжения в цепи питания УЭ 18 приводит к снижению тока перехвата, протекающего через электрод. Регулирование осуществляется таким образом, чтобы производная тока по времени в контуре стремилась к нулю. В результате такого регулирования снижаются непроизводительные потери энергии и рабочего газа, что обеспечивает дополнительное увеличение эффективности двигателя.
Применение двух дополнительных датчиков тока позволяет контролировать ток в цепи питания ЭЭ 16. Уменьшение тока в этой цепи характеризует ситуацию, при которой часть электронов, генерируемых в НПЗ 11, преодолевает потенциальный барьер, создаваемый потенциалом УЭ 18, и попадает в межэлектродное пространство ИОС 15. В результате рекомбинации образуются нейтральные атомы рабочего газа. В этом случае по управляющему сигналу МК 8, который передается в ИПУ 19, прекращается снижение напряжения на УЭ 18.
Представленные примеры осуществления изобретения подтверждают возможность повышения эффективности ЭРД (увеличения удельного импульса двигателя) при регулировании тяги, расширения диапазона регулирования тяги и повышения стабильности тяги двигателя за счет автоматического поддержания расчетных значений токов и напряжений в цепях питания узлов и блоков ЭРД. Кроме того, использование в составе системы управления микроконтроллера с тактовым генератором сигнала изменяемой частоты, усилителя мощности ВЧ сигнала и фазового детектора (в виде отдельного блока) с соответствующими связями с объектами управления позволяет расширить функциональные возможности системы управления за счет взаимосвязанного регулирования параметров электропитания различных узлов и блоков ЭРД.
Вышеописанные примеры осуществления изобретения основываются на применении в составе системы управления конкретных элементов, микросхем, источников электропитания, датчиков и средств регулирования параметров системы электропитания и системы подачи рабочего газа. Однако представленное описание примеров реализации системы управления ЭРД не исключает возможности достижения технического результата и в других частных случаях реализации изобретения в том виде, как оно охарактеризовано в независимом пункте формулы.
В зависимости от конкретных задач, решаемых с помощью ЭРД и ДУ в целом, выбираются соответствующие элементы, узлы и блоки системы управления ЭРД. При использовании нескольких двигателей в составе ДУ либо при наземной экспериментальной или стендовой отработке ЭРД МК 8 подключается через внешний интерфейс к системе управления ДУ. Система управления может быть реализована без дополнительных датчиков тока, включенных в контуры электропитания электродов ИОС 15. В этом случае для регистрации тока генерируемого пучка ионов могут применяться иные известные средства диагностики пучков заряженных частиц.
Для нейтрализации пространственного заряда ионного потока, наряду с термоэмиссионным катодом, могут применяться нейтрализаторы пространственного заряда с различными типами средств инициации газового разряда. В качестве исполнительного органа регулятора расхода может использоваться, например, управляемый электропневмоклапан с регулируемым элементом сопротивления газовому потоку. Конкретная конструкция регулятора расхода газа выбирается в зависимости от величины номинального расхода газа и требуемого диапазона регулирования.
Система управления может применяться с использованием вспомогательного емкостного разряда для генерации плазмы в газоразрядной камере ЭРД. В этом случае в состав системы управления должен быть включен дополнительный управляемый источник электропитания, который подключается к одному или нескольким электродам, размещаемым в объеме газоразрядной камеры.
Система управления ЭРД с индукционным возбуждением электрического разряда в газоразрядной камере может применяться в составе ДУ на борту КА различного назначения, в том числе на телекоммуникационных КА, работающих на геостационарной орбите Земли. ДУ с одним или несколькими управляемыми ЭРД может выполнять ряд функций, требующих создания стабильной реактивной тяги в течение длительного срока эксплуатации КА при различных циклограммах включения ЭРД. К таким функциям ДУ, в частности, относятся: ориентация и стабилизация КА при кратковременных цикличных включениях ЭРД, коррекция рабочей орбиты и довыведение КА на заданную орбиту при непрерывном включении ЭРД в течение нескольких месяцев. Наиболее эффективно применение системы управления для реализации с помощью ЭРД задач, связанных с довыведением КА, коррекцией рабочих орбит КА и работой в составе маршевой ДУ КА при осуществлении режимов с переменной тягой и удельным импульсом. Данные режимы работы ДУ позволяют существенно сократить время перелета КА и запас рабочего тела.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИОННЫЙ ДВИГАТЕЛЬ | 2014 |
|
RU2565646C1 |
| ИОННЫЙ ДВИГАТЕЛЬ | 2013 |
|
RU2543103C2 |
| Прямоточный релятивистский двигатель | 2020 |
|
RU2776324C1 |
| Ионный ракетный двигатель космического аппарата | 2018 |
|
RU2682962C1 |
| ЭЛЕКТРИЧЕСКИЙ ИМИТАТОР СТАЦИОНАРНОГО ПЛАЗМЕННОГО ДВИГАТЕЛЯ | 2024 |
|
RU2830092C1 |
| Источник ионов | 2020 |
|
RU2749668C1 |
| Космический аппарат для очистки околоземного космического пространства от космического мусора | 2022 |
|
RU2784740C1 |
| СПОСОБ НЕЙТРАЛИЗАЦИИ ОБЪЕМНОГО ЗАРЯДА ИОННОГО ПОТОКА | 2012 |
|
RU2520270C2 |
| ЭЛЕКТРОВЗРЫВНОЙ РАКЕТНЫЙ ДВИГАТЕЛЬ | 2000 |
|
RU2193100C2 |
| СПОСОБ ЗАПУСКА И ЭЛЕКТРОПИТАНИЯ ЭЛЕКТРОРЕАКТИВНОГО ПЛАЗМЕННОГО ДВИГАТЕЛЯ (ЕГО ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ЕГО ВАРИАНТЫ) | 2008 |
|
RU2366123C1 |
Изобретение относится к средствам управления электрическими ракетными двигателями с индукционным возбуждением разряда в газоразрядной камере. Устройство генерации ВЧ энергии содержит микроконтроллер (8), усилитель мощности (3) и источник (6) электропитания усилителя мощности. Микроконтроллер (8) выполнен с аналого-цифровым преобразователем входных управляющих сигналов, цифроаналоговым преобразователем выходных сигналов и тактовым генератором сигнала с перестраиваемой частотой. Выходы усилителя мощности (3) соединены через линию связи с устройством ввода энергии (1), которое выполнено в виде индуктора. Устройство (1) установлено с внешней стороны стенок газоразрядной камеры (2). В линию связи с устройством ввода энергии (1) включены датчики тока (4) и напряжения (5). Выходы датчиков подключены к входам фазового детектора (7) и к сигнальным входам микроконтроллера (8). Выход фазового детектора (7) подключен к сигнальному входу микроконтроллера (8). Электропитание нейтрализатора (11) пространственного заряда ионного потока и входящего в его состав термоэмиссионного катода осуществляется с помощью источников (13) и (14). Положительный полюс источника напряжения (19) и отрицательный полюс источника напряжения (17) раздельно подключены через датчики тока (25) и (26) к общему выводу системы электропитания двигателя. Расход рабочего газа, подаваемого в газоразрядную камеру и в камеру нейтрализатора, регулируется с помощью двух независимо управляемых регуляторов. Электропитание регуляторов расхода газа осуществляется с помощью управляемых источников тока. Технический результат заключается в повышении эффективности двигателя, расширении диапазона регулирования тяги при высоком удельном импульсе и повышении стабильности тяги за счет автоматического поддержания расчетных значений токов и напряжений в цепях питания узлов и блоков двигателя в процессе его длительной эксплуатации. 6 з.п. ф-лы, 2 ил.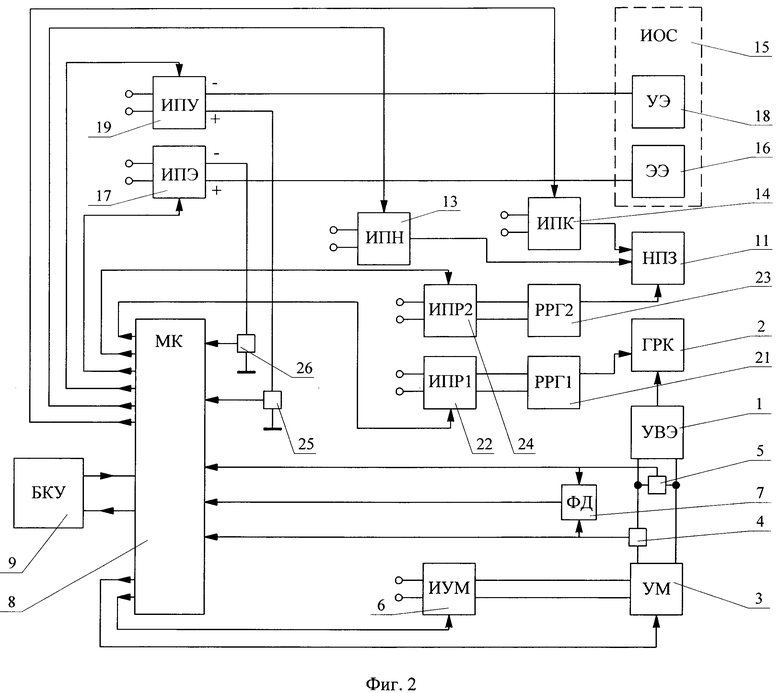
1. Система управления электрическим ракетным двигателем с индукционным возбуждением электрического разряда в газоразрядной камере, содержащая устройство генерации высокочастотной энергии, выходы которого соединены через линию связи с устройством ввода энергии в газоразрядную камеру, выполненным в виде индуктора, источник электропитания нейтрализатора пространственного заряда ионного потока, источник электропитания ускоряющего электрода, отрицательный полюс которого подключен к ускоряющему электроду ионно-оптической системы двигателя, источник электропитания эмиссионного электрода, положительный полюс которого подключен к эмиссионному электроду ионно-оптической системы двигателя, отличающаяся тем, что включает в свой состав фазовый детектор, датчики тока и напряжения, по меньшей мере один регулятор расхода газа и по меньшей мере один источник электропитания регулятора расхода газа, при этом устройство генерации высокочастотной энергии содержит микроконтроллер с аналого-цифровым преобразователем входных управляющих сигналов, цифроаналоговым преобразователем выходных сигналов и тактовым генератором сигнала с перестраиваемой частотой, усилитель мощности высокочастотного сигнала и источник электропитания усилителя мощности высокочастотного сигнала, причем датчики тока и напряжения включены в линию связи с индуктором, выходы датчиков тока и напряжения подключены к входам фазового детектора и к сигнальным входам микроконтроллера, выход фазового детектора соединен с сигнальным входом микроконтроллера, управляющие выходы микроконтроллера соединены с входами источника электропитания усилителя мощности высокочастотного сигнала, усилителя мощности высокочастотного сигнала, источника электропитания ускоряющего электрода, источника электропитания эмиссионного электрода, источника электропитания нейтрализатора пространственного заряда ионного потока и источника электропитания регулятора расхода газа.
2. Система по п. 1, отличающаяся тем, что содержит дополнительный датчик тока, при этом положительный полюс источника электропитания ускоряющего электрода и отрицательный полюс источника электропитания эмиссионного электрода соединены с общим выводом системы электропитания двигателя через дополнительный датчик тока, выход дополнительного датчика тока соединен с сигнальным входом микроконтроллера.
3. Система по п. 1, отличающаяся тем, что содержит два дополнительных датчика тока, при этом положительный полюс источника электропитания ускоряющего электрода соединен с общим выводом системы электропитания двигателя через первый дополнительный датчик тока, отрицательный полюс источника электропитания эмиссионного электрода соединен с общим выводом системы электропитания через второй дополнительный датчик тока, причем выходы дополнительных датчиков тока раздельно соединены с сигнальными входами микроконтроллера.
4. Система по п. 1, отличающаяся тем, что при использовании термоэмиссионного катода в составе нейтрализатора пространственного заряда ионного потока содержит источник электропитания термоэмиссионного катода, при этом вход управления источника электропитания термоэмиссионного катода подключен к управляющему выходу микроконтроллера.
5. Система по п. 1, отличающаяся тем, что регулятор расхода газа выполнен в виде термодросселя, подключенного к источнику электропитания регулятора расхода газа, при этом выходной канал термодросселя параллельно соединен с газоразрядной камерой двигателя и нейтрализатором пространственного заряда ионного потока.
6. Система по п. 1, отличающаяся тем, что содержит два регулятора расхода газа, каждый из которых выполнен в виде термодросселя, и два источника электропитания регулятора расхода газа, при этом первый термодроссель, выходной канал которого соединен с газоразрядной камерой двигателя, подключен к первому источнику электропитания регулятора расхода газа, второй термодроссель, выходной канал которого соединен с нейтрализатором пространственного заряда ионного потока, подключен ко второму источнику электропитания регулятора расхода газа, управляющие выходы микроконтроллера соединены с каждым источником электропитания регулятора расхода газа.
7. Система по п. 1, отличающаяся тем, что микроконтроллер соединен через внешний интерфейс с системой управления двигательной установкой или с бортовым комплексом управления космического аппарата.
| Lebeda Anton, Lebeda Arnold | |||
| Radio Frequency Ion Thruster - Radio Frequency Generator, Power Supply, and High Voltage Converter | |||
| Электронный журнал "Труды МАИ" | |||
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
| УСТРОЙСТВО ЗАПУСКА И ЭЛЕКТРОПИТАНИЯ ЭЛЕКТРОРЕАКТИВНОГО ПЛАЗМЕННОГО ДВИГАТЕЛЯ | 2003 |
|
RU2265135C2 |
| СТАЦИОНАРНЫЙ ПЛАЗМЕННЫЙ ДВИГАТЕЛЬ | 1991 |
|
RU2009374C1 |
| EP 0909894 A1, 21.04.1999 | |||
| US 4766724 A, 30.08.1988 | |||

