Изобретение относится к области космической техники, а конкретно к космическим аппаратам (КА) орбитального обслуживания, предназначенным для решения одной из задач, относящихся к целям орбитального обслуживания, а именно: к осуществлению увода объектов космического мусора преимущественно техногенной природы с рабочих орбит на безопасные орбиты.
Другие, относящиеся к данному типу КА, выполняют иные операции: дозаправки, ремонта, замены функциональных систем и др. Все КА этого типа осуществляют схожие маневры, включающие в автоматическом режиме: сближение с объектом-целью, взаимодействие с не кооперируемым или частично кооперируемым объектом–целью, в частности стыковку и совместный полет с ним, повторные маневры по подлету к следующему объекту–цели. Соответственно, все КА орбитального обслуживания имеют общие или подобные архитектуру, энерговооруженность, двигательные установки и средства обнаружения объекта–цели.
Предлагаемый КА за счет наличия бортовой системы бесконтактного воздействия на основе инжектора ионов осуществляет отличный от других типов КА орбитального обслуживания тип взаимодействия с объектом космического мусора, как с некооперируемым объектом: он придает ему необходимый для увода с рабочей орбиты суммарный импульс силы, действуя и сопровождая его с некоторого расстояния, то есть, не вступая с ним в непосредственный контакт. Это позволяет сделать конструкцию КА более простой за счет отсутствия средств захвата и удержания некооперируемого объекта, а также повысить надежность выполнения задачи (исключен непосредственный контакт с объектом–целью, находящемся в неуправляемом движении относительно его центра масс, что угрожает катастрофическим столкновением объектов).
Аналог
Известен космический аппарат (КА) для очистки околоземного космического пространства от космического мусора, путем воздействия на удаляемый объект космического мусора ионным пучком, содержащий двигательную установку и систему бесконтактного воздействия на удаляемый объект космического мусора ионным пучком [Bombardelli and J. Pelaez, PCT patent application WO 2011/110701, A1, Int. Cl. B64G 1/24, filed 11.03.2010 (15.09.2011)]. Работа КА осуществляется следующим образом. КА выводится на близкое к удаляемому объекту расстояние, такое, чтобы генерируемый с борта КА поток ионов достигал удаляемый объект и создавал силу в направлении этого объекта, требуемую для его увода с орбиты пребывания в сторону безопасной орбиты. В качестве двигательной установки может использоваться электроракетная двигательная установка (ЭРДУ), которая должна не только создавать тягу, обеспечивающую сопровождение удаляемого объекта, но и поддерживать расстояние между КА и удаляемым объектом в заданных пределах. Для этого КА оснащен системой определения расстояния между объектами и системой управления тягой двигательной установки для решения этой задачи.
Недостатком известного решения является то, что в нем не определены конкретные технические средства, касающиеся архитектуры КА и его подсистем, типов и свойств их исполнительных органов, обеспечивающих увод космического мусора с рабочей орбиты. По этой причине техническое решение не раскрыто и не может быть оценено с точки зрения эффективности способа увода объектов космического мусора (ОКМ) ионным пучком.
Прототип
Ближайшим техническим решением является космический аппарат для очистки околоземного космического пространства от космического мусора, путем воздействия на удаляемый объект космического мусора ионным пучком, содержащий корпус с силовыми элементами, формирующими платформу, имеющую в своем составе энергетическую установку, включающую панели солнечных батарей, систему бесконтактного воздействия на удаляемый объект космического мусора, содержащую газоразрядный инжектор ионов с трехэлектродной электростатической системой ускорения ионов, выходной электрод которой электрически соединен с корпусом космического аппарата, и управляющую электроракетную двигательную установку, установленную с противоположной от системы бесконтактного воздействия стороны, при этом ось инжектора ионов совпадает с продольной осью связанной системы координат, проходящей через центр масс космического аппарата, систему электропитания и управления электроракетной двигательной установки и систему электропитания и управления системы бесконтактного воздействия, включающую источники электропитания разряда и источники электропитания, подключенные к электродам трехэлектродной электростатической системы ускорения ионов [F. Cichoci, M. Merino, E. Ahedo, M. Smirnova, A. Mingoand M. Dobkevicius, Electric propulsion subsystem optimization for “Ion Beam Shepherd” missions, J. Propul. Power 33 (3) (2017) 9].
Использование в прототипе конкретных технических средств, а именно: систему бесконтактного воздействия на удаляемый объект космического мусора в виде высокочастотного ионного двигателя, и ЭРДУ на основе одного ионного двигателя с разрядом постоянного тока, позволило установить взаимосвязь характеристик указанных технических средств с физическими особенностями воздействия ионным пучком на удаляемый объект, а также с массогабаритными параметрами КА и удаляемого объекта.
Недостатком известного решения является то, что при его реализации резко падает эффективность передачи импульса силы ионным пучком ОКМ при увеличении рабочего расстояния между КА и ОКМ. Недостатком известного решения является также использование в составе управляющей ЭРДУ одного ионного двигателя. При таком исполнении ЭРДУ управление движением КА при сближении с ОКМ и его уводе с орбиты не может быть осуществлено.
Указанные недостатки можно объяснить, рассмотрев особенности реализации способа увода ОКМ ионным пучком.
Ионный пучок является средством воздействия на объект космического мусора (ОКМ) путем передачи ему импульса силы. КА при этом должен сопровождать ОКМ на некотором расстоянии d. Для этого, в среднем, ускорения КА и ОКМ должны быть равны. Из этого условия можно получить необходимую для реализации способа связь между массой КА MКА, массой ОКМ МОКМ, силой тяги инжектора ионов FСИ и тягой двигательной установки FДУ

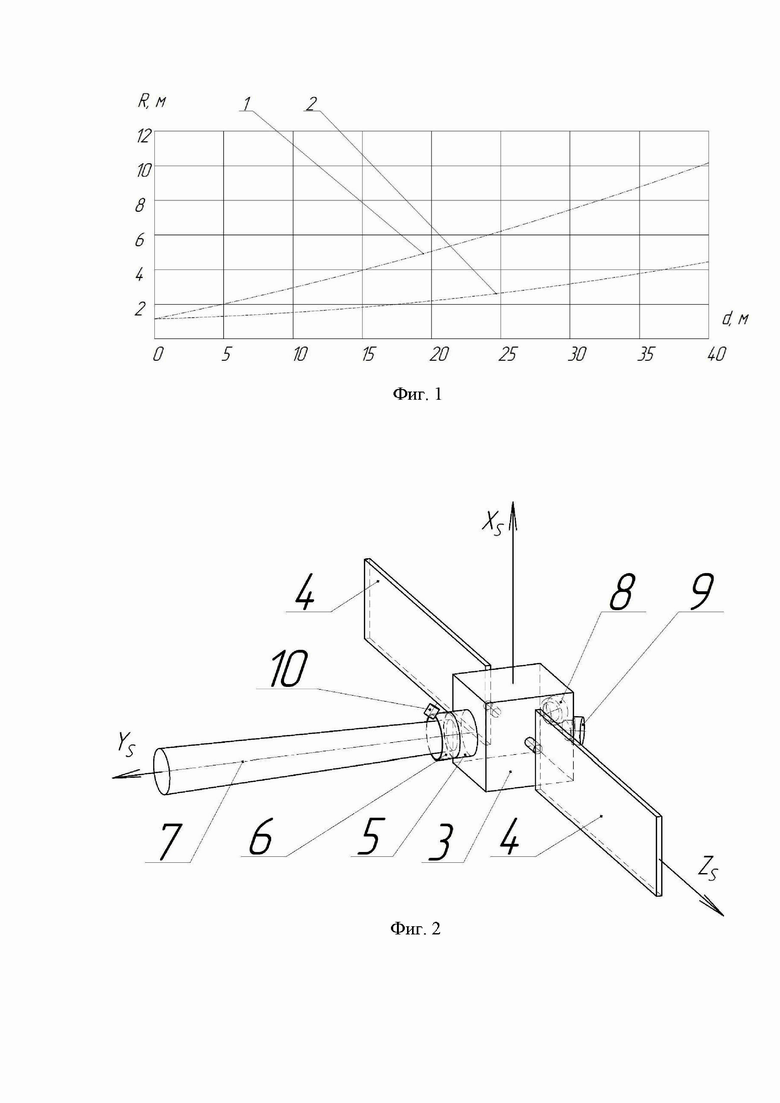
В этой формуле k=Fd/FСИ≤1 - коэффициент, равный отношению силы Fd, передаваемой ионным пучком ОКМ, к силе, создаваемой системой инжекции ионного пучка FСИ. Эффективность способа увода ионным пучком главным образом определяется значением коэффициента k, который зависит от расстояния между КА и ОКМ: k(d). Характер данной зависимости определяется эволюцией квазинейтрального ионного пучка при его истечении в вакуум космического пространства. Физике процессов в ионном пучке посвящено много работ. Обзор этих работ можно найти в [C. Bombardelli, M. Merino-Martinez, E.A. Galilea, et al. Ariadna Call for Ideas: Active Removal of Space Debris. Ion Beam Shepherd for Contactless Debris Removal // Advanced Concept Team, ESTEC-ESA, 2011. – Ariadna ID: 10-4611. – 91 p.]. При стендовых испытаниях измерения параметров плазмы в пучке производят в сечении (или сечениях) на расстоянии от среза двигателя, соизмеримом с диаметром пучка (в ближней зоне). Экспериментальные данные по характеристикам ионного пучка в дальней зоне на расстоянии 10-20 м от среза источника ионного пучка (ИИП) отсутствуют, поэтому при оценке силы Fd приходится опираться на расчеты. Параметры пучка на выходе из ближней зоны являются начальными параметрами при рассмотрении задачи об эволюции пучка при его инжекции в вакуум. В [V.A. Obukhov, V.A. Kirillov, V.G. Petukhov, G.A. Popov, V.V. Svotina, N. A. Testoyedov, and I.V. Usovik. Problematic issues of spacecraft development for contactless removal of space debris by ion beam. Acta Astronaut., 181(2021), pp. 569-578, DOI: 10.1016/j.actaastro.2021.01.043] приведена изображенная на Фиг. 1 зависимость радиуса ионного пучка R от расстояния d между КА и ОКМ при различных начальных полу углах расходимости пучка α0.
Из расчетов следует, что ионный пучок даже с малой начальной расходимостью α0≈4° на расстоянии d от КА свыше 20 м будет иметь диаметр свыше 2 м, а при d=40 м – около 4 м. При этом характерный размер ОКМ массой до 2 тонн не превышает 1,5 м. Очевидно, что большая часть ионов пролетят мимо ОКМ. Расчеты показали, что использование в качестве системы инжекции ионного пучка серийного ионного двигателя с полу углом расходимости около 12°, как в прототипе, приводит к быстрой расходимости пучка. При d=20 м радиус ионного пучка по прототипу составит более 5,5 м (кривая 1 на Фиг.1). С увеличением радиуса пучка коэффициент k снижается.
Для характеристик системы инжекции по прототипу авторы получили приемлемые значения k>0,5 при значении d<7,5 м. Однако при таких малых расстояниях существует опасность механического взаимодействия КА с ОКМ (например, с ОКМ техногенной природы – в виде выработавшего ресурс эксплуатации КА) с учетом размаха панелей солнечных батарей обоих объектов. Кроме того, на таких расстояниях может произойти быстрое засорение рабочих поверхностей оптических приборов и солнечных батарей КА продуктами эрозии ОКМ под действием ионного пучка. В результате характеристики важнейших подсистем КА деградируют.
Использование системы инжекции ионов со слабо расходящимся ионным пучком, как это предложено в [V.A. Obukhov, V.A. Kirillov, V.G. Petukhov, G.A. Popov, V.V. Svotina, N. A. Testoyedov, and I.V. Usovik. Problematic issues of spacecraft development for contactless removal of space debris by ion beam. Acta Astronaut., 181(2021), pp. 569-578, DOI: 10.1016/j.actaastro.2021.01.043 позволяет увеличить рабочее расстояние между КА и ОКМ согласно кривой 2 Фиг. 1. Однако радикально проблему увеличения рабочего расстояния между КА и ОКМ можно решить только, по возможности, максимально снизив влияние расходимости пучка частиц, воздействующего на ОКМ, с расстоянием между объектами.
Наличие в составе управляющей ЭРДУ одного ионного двигателя, практически не позволяют решить задачу управления виртуальной (без механической связи) связкой КА-ОКМ, так как не ясны алгоритмы и технические средства управления вектором тяги такой ЭРДУ.
Техническим результатом является повышение эффективности передачи импульса силы ионным пучком удаляемому ОКМ на больших расстояниях КА от ОКМ за счет преобразования ионного пучка в пучок быстрых атомов, а также возможность управления движением связки КА-ОКМ путем выполнения ЭРДУ определенной архитектуры, а именно: за счет применения ЭРДУ, содержащей два двигателя, каждый из которых установлен на двухкоординатном подвесе согласованно с расположением панелей солнечных батарей солнечной энергетической установки КА и введения соответствующих обратных связей.
Заявленный технический результат достигается тем, что в известном космическом аппарате для очистки околоземного космического пространства от космического мусора, путем воздействия на удаляемый объект космического мусора ионным пучком, содержащий корпус с силовыми элементами, формирующими платформу, имеющую в своем составе энергетическую установку, включающую панели солнечных батарей, систему бесконтактного воздействия на удаляемый объект космического мусора, содержащую газоразрядный инжектор ионов с трехэлектродной электростатической системой ускорения ионов, выходной электрод которой электрически соединен с корпусом космического аппарата, и управляющую электроракетную двигательную установку, установленную с противоположной от системы бесконтактного воздействия стороны, при этом ось инжектора ионов совпадает с продольной осью связанной системы координат, проходящей через центр масс космического аппарата, систему электропитания и управления электроракетной двигательной установки и систему электропитания и управления системы бесконтактного воздействия, включающую источники электропитания разряда и источники электропитания, подключенные к электродам трехэлектродной электростатической системы ускорения ионов, согласно заявляемому изобретению система бесконтактного воздействия оснащена преобразователем ионного пучка в виде цилиндрического насадка, установленного на выходе из инжектора ионов, охватывающим ионный пучок, гальванически соединенный с корпусом космического аппарата, длина L насадка выбирается из условия задаваемого коэффициента преобразования пучка ионов высокой энергии в пучок атомов высокой энергии с учетом характеристик инжектора ионов.
В частном случае реализации преобразователь гальванически соединен с корпусом космического аппарата независимо от инжектора ионов и введена система управления коэффициентом преобразования пучка ионов в пучок быстрых атомов в виде обратной связи между током в цепи преобразователя и током ионного пучка, включающая датчик тока в цепи преобразователя, датчик тока в цепи питания эмиссионного электрода трехэлектродной электростатической системы ускорения ионов, при этом оба датчика подключены к блоку управления мощностью источника электропитания разрядом в инжекторе ионов.
Оси панелей солнечных батарей солнечной энергетической установки могут быть установлены с возможностью их вращения вокруг оси, параллельной оси (OZ)S связанной системы координат космического аппарата, электроракетная двигательная установка содержит два электроракетных двигателя в плоскости OXSYS ортогонально оси (OZ)S, каждый из двигателей установлен на поворотном устройстве на расстоянии LYE относительно оси (OX)S и на равном расстоянии LXE относительно оси (OY)S с возможностью их независимого отклонения в двух взаимно перпендикулярных направлениях на углы ±α1 и ±α2 относительно осей (OX)S и (OZ)S, соответственно.
Фиг. 1. Зависимость радиуса ионного пучка от расстояния между КА и ОКМ и начального полуугла расходимости 1-α=12°, 2-α=4°.
Фиг. 2. Конструктивная схема космического аппарата.
Фиг. 3. Схема расположения двигателей электроракетной двигательной установки.
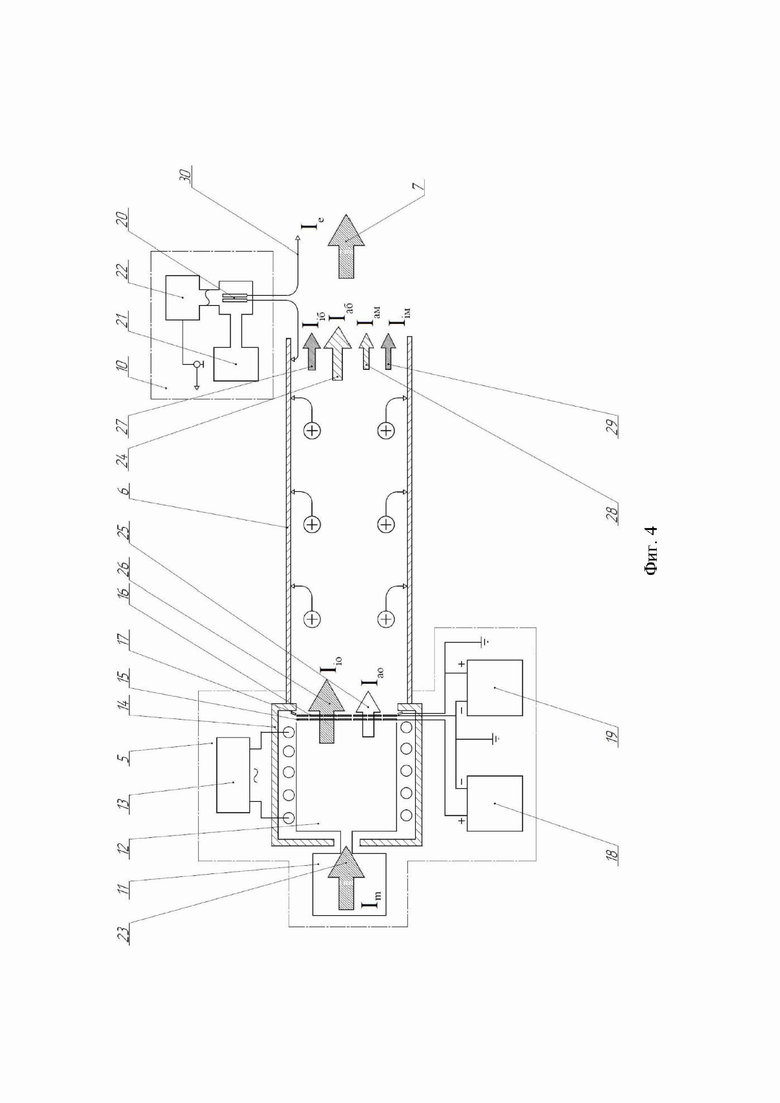
Фиг. 4. Система инжекции пучка ионов.
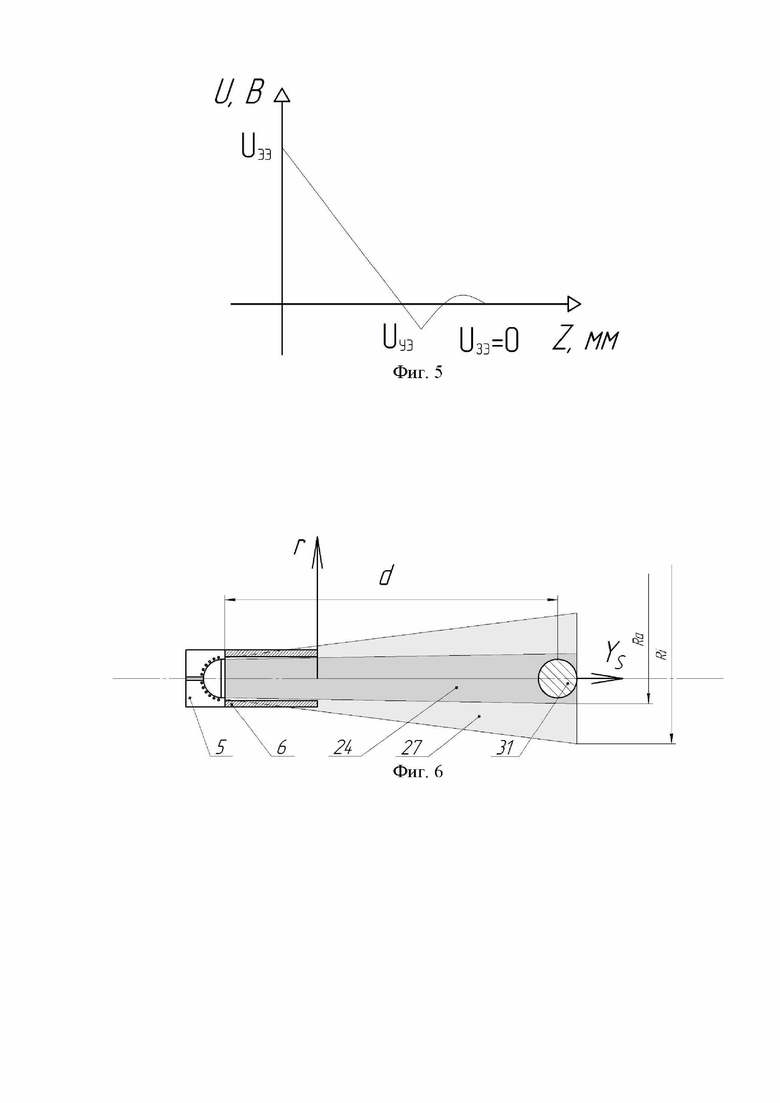
Фиг. 5. Распределение электрического потенциала в ионно-оптической системе.
Фиг. 6. Структура ионно-атомного потока частиц высокой энергии.
Фиг. 7. Схема управления разрядом.
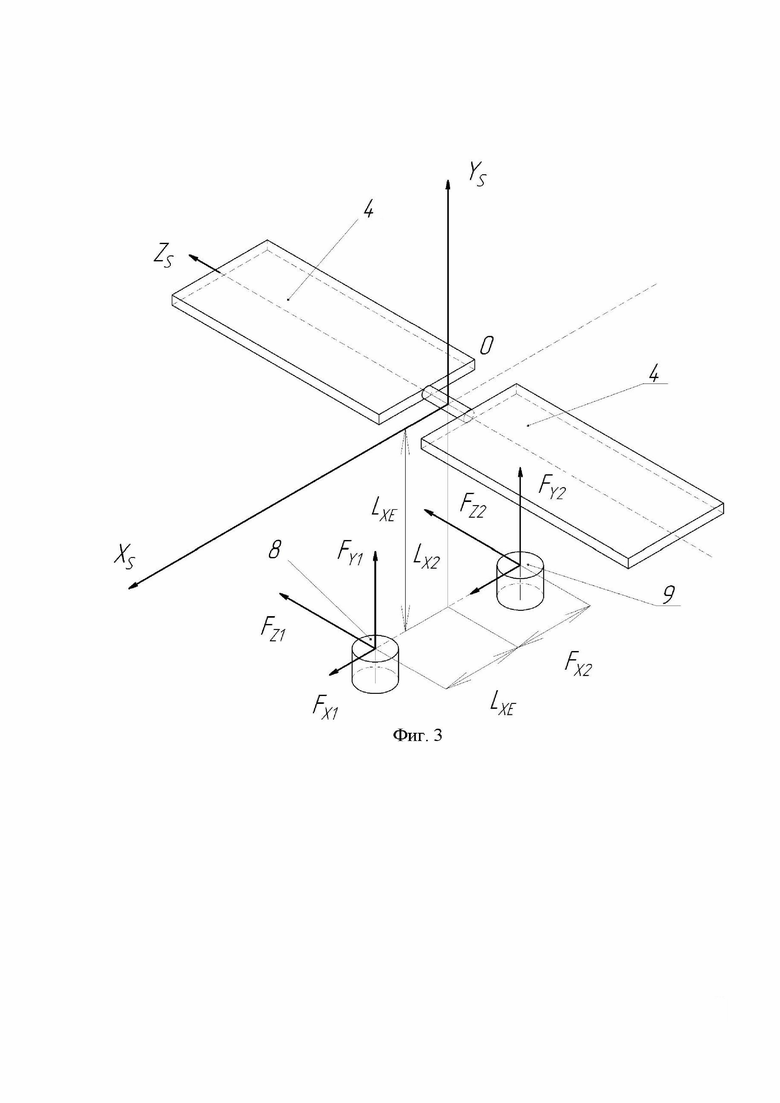
Принципиальная конструктивная схема предлагаемого КА и связанная с ним система координат приведена на Фиг. 2.
КА содержит корпус 3 с силовыми элементами, формирующими платформу, имеющую в своем составе солнечную энергетическую установку, включающую панели солнечных батарей (ПСБ) 4, систему инжекции пучка частиц высокой энергии для бесконтактного воздействия на ОКМ, содержащую газоразрядный инжектор ионов 5 и преобразователь ионного пучка 6, при этом ось инжектора ионов и преобразователя ионного пучка совпадает с продольной осью (OY)S связанной системы координат КА, проходящей через центр масс космического аппарата, ось (OX)S лежит в плоскости, ортогональной оси вращения ПСБ 4 солнечной энергетической установки, параллельной оси (OZ)S, дополняющей связанную систему координат КА до правой. Система инжекции пучка частиц высокой энергии формирует смешанный ионно-атомный пучок частиц 7. Электроракетная двигательная установка (ЭРДУ) содержит два электроракетных двигателя (ЭРД) 8 и 9. ЭРД установлены с противоположной от системы инжекции пучка частиц высокой энергии стороны корпуса 3 в плоскости OXSYS ортогонально оси (OZ)S, каждый из двигателей 8 и 9 установлен на поворотном устройстве (на чертеже не показано), соответственно, на расстоянии LYE относительно оси (OX)S и на равном расстоянии LXE относительно оси (OY)S с возможностью их независимого вращения относительно двух ортогональных осей поворота, создавая при этом проекции сил и моментов на оси связанной с КА системы координат, как это показано на Фиг. 3.
Инжектор ионов 5 системы инжекции пучка частиц высокой энергии, выполненный одного из известных типов, например, с высокочастотным разрядом, осуществляет ионизацию рабочего газа, например, ксенона, криптона, йода и др., а также ускорение ионов до заданной энергии с помощью, например, трехэлектродной электростатической системы ускорения. На выходе из инжектора ионов 5 установлен преобразователь ионного пучка 6, выполненный в виде трубчатого насадка, охватывающего ионный пучок длиной L и диаметром D. На выходе из преобразователя ионного пучка 6 установлен нейтрализатор 10 ионного пучка в виде источника электронов одного из известных типов, например, на основе полого катода.
Пример реализации
Предлагаемый КА может быть создан, например, на базе одной из известных космических платформ телекоммуникационных геостационарных спутников, располагающих энергоустановкой необходимой мощности, системой хранения рабочего тела ЭРДУ и инжектора ионов. Такая платформа должна быть оснащена ЭРДУ описанной архитектуры и системой инжекции описанного состава. В качестве двигателей ЭРДУ могут использоваться, например, стационарные плазменные двигатели (СПД), имеющие богатую историю применения на отечественных и зарубежных космических аппаратах, или ионные двигатели одного из известных типов. В качестве примера рассмотрено применение пары СПД.
Согласно изобретению, система инжекции пучка частиц высокой энергии (Фиг. 4) включает инжектор ионов 5, содержащий газоразрядный источник ионов одного из известных типов, систему хранения и подачи рабочего газа 11, разрядную камеру 12, источник 13 электропитания разряда, подключенного к индуктору 14, электростатическую систему ускорения ионов, образованную эмиссионным электродом 15, ускоряющим электродом 16 и замедляющим электродом 17. Трехэлектродная система ускорения ионов позволяет реализовать систему «ускорение-замедление» с распределением электрического потенциала на электродах, приведенным на Фиг. 5, где UЭЭ – потенциал эмиссионного электрода 15, UУЭ – потенциал ускоряющего электрода 16, UЗЭ-потенциал замедляющего электрода 17. Равенство его 0 означает, что он находится под потенциалом корпуса КА «заземлен». Для задания указанного распределения потенциала используются источник 18 электропитания цепи эмиссионного электрода 15, источник 19 электропитания цепи ускоряющего электрода 16. Система инжекции заряженных частиц содержит также нейтрализатор 10 в виде источника электронов одного из известных типов, например, на основе полого катода 20, требующего для своей работы систему 21 подачи рабочего газа и источник 22 электропитания. На Фиг. 4 условно различными знаками в виде «стрелок» показаны: стрелкой 23 - расход газа Im в разрядную камеру 12, стрелкой 26 - ток Ii0 ионного пучка из инжектора ионов 5 на входе в преобразователь ионного пучка 6, стрелкой 25 - ток Iа0 неионизованных атомов, стрелкой 24 - ток IаБ, атомов высокой энергии, стрелкой 27 ток IiБ - ионов высокой энергии, стрелкой 28 - ток IаМ атомов низкой энергии, стрелкой 29 - ток IiM ионов низкой энергии, стрелкой 30 - ток Ie электронов.
Описание работы КА
Работа КА при уводе ОКМ осуществляется следующим образом. КА ракетной системой выведения доставляется на орбиту уводимого объекта космического мусора, после чего осуществляется этап сближения КА с ОКМ с использованием управляющей ЭРДУ. Управление ориентацией КА осуществляется при этом (как обычно) с помощью бортовой системы ориентации КА, являющейся штатной частью платформы КА.
Управление КА при выполнении маневров по сближению с ОКМ и при уводе ОКМ с орбиты решается с помощью двух поворотных двигателей ЭРДУ. Предложенная архитектура ЭРДУ позволяет управлять вектором тяги ЭРДУ. Проблема заключается в том, что электроракетные двигатели (ЭРД) являются однорежимными по тяге (в редких случаях двухрежимными). Поэтому предлагается управлять вектором тяги ЭРДУ путем согласованного поворота двигателей, что приводит к управлению компонент сил FXi, FYi, FZi, как это показано на Фиг. 3. Предложенная архитектура ЭРДУ позволяет реализовать алгоритм управления, основанный на управлении относительной дальности между КА и ОКМ и боковым движением КА. За счет поворота двигателей ЭРДУ следует смещать КА таким образом, чтобы вектор относительной дальности между КА и ОКМ совпадал с направлением трансверсали орбитальной системы координат. В качестве параметров управления боковым движением КА могут рассматриваться либо значения смещений ОКМ в проекциях на оси XS и ZS, при которых относительная дальность становится параллельной трансверсали, либо углы между направлением трансверсали и осями XS и ZS связанной системы координат КА, ортогональными продольной оси КА в случае разгона ОКМ. При управлении относительным расстоянием между КА и ОКМ используется информация об отклонении относительного расстояния между КА и ОКМ от некоторого среднего значения, а также о производных изменения относительной дальности.
Предложенная конструктивная схема КА, при которой ось инжектора ионов и преобразователя ионного пучка проходит через центр масс КА и лежит в плоскости, ортогональной оси вращения ПСБ 4 солнечной энергетической установки, параллельной оси (OZ)S позволяет минимизировать паразитные моменты, накапливающиеся относительно осей связанной системы координат и нагружающих штатную систему ориентации КА.
После сближения КА с ОКМ на расстояние 40-60 м начинается этап увода ОКМ. Для этого включается система инжекции пучка («быстрых») частиц высокой энергии для бесконтактного воздействия на ОКМ. Для этого производится запуск и работа инжектора ионного пучка. Формируемый инжектором ионов ионный пучок с током Ii0, входит в преобразователь ионного пучка 6, в котором он преобразуется за счет резонансной перезарядки в смешанный ионно-атомный пучок 7 высокой энергии. Этот пучок воздействует на ОКМ, передавая ему импульс силы и придавая, тем самым, ускорение в направлении действия пучка. Если увод ОКМ осуществляется с повышением орбиты, как например, в случае очистки области геостационарной орбиты (ГСО), то КА должен быть расположен позади ОКМ. За счет действия импульса силы ОКМ постепенно переходит на более высокую орбиту (в случае ГСО безопасная орбита, согласно международному регламенту, находится на 300 км выше ГСО). В случае, если безопасная орбита находится ниже орбиты ОКМ, как это имеет место при очистке области нижних орбит, КА при сближении располагают перед ОКМ и воздействие на него ионным пучком приводит к переходу на более низкую орбиту. Длительность воздействия и передаваемый суммарный импульс силы определяется временем, необходимым для придания ОКМ требуемой характеристической скорости Vхар, соответствующей переходу на заданную безопасную орбиту. Основная задача при этом состоит, с одной стороны, в поддержании направления оси инжекции в направлении на ОКМ, а с другой стороны, в обеспечении ориентации ПСБ в сторону Солнца.
Управление движением КА на этапе увода производится по описанному выше алгоритму.
Система инжекции пучка быстрых частиц работает следующим образом. В разрядную камеру 12 подается рабочий газ с расходом Im 23. Далее будет удобно выражать все составляющие потока частиц в токовых единицах (в Амперах). В частности, расход газа в токовых единицах выразится следующим образом:

здесь e - элементарный заряд в Кл, m - расход газа в кг/с, M - масса иона в кг. Например, для ксенона e/M=7,32⋅105 Кл/кг.
После подачи газа к разрядной камере 12 от источника 13 электропитания разряда подводится мощность к индуктору 14 и зажигается разряд. В результате в газоразрядной камере 12 образуется и поддерживается плазма, содержащая ионы, электроны и неионизованные атомы. Для формирования ионного пучка на электроды электростатической трехэлектродной системы ускорения ионного пучка от источников электропитания 18 и 19 подаются электрические потенциалы, схематично показанные на Фиг. 5. На эмиссионный электрод 15 от источника 18 электропитания подается положительный относительно корпуса КА (потенциал корпуса КА условно изображен символом «земля») потенциал UЭЭ, на ускоряющий электрод 16 – от источника 19 электропитания отрицательный по величине потенциал UУЭ, замедляющий электрод гальванически соединен с корпусом КА («заземлен»). Как следует из Фиг. 4 и Фиг. 5, на выходе из источника формируется ионный пучок с током Ii0 и энергией ионов eUЭЭ, соответствующей потенциалу эмиссионного электрода 15. Ток Ii0 условно изображен на Фиг. 4 затушеванной стрелкой 26. Потенциал ускоряющего электрода, отрицательный по величине, UУЭ необходим, чтобы создать потенциальный барьер, препятствующий прохождению электронов из нейтрализатора 10 в разрядную камеру 12. Величину этого потенциала выбирают минимальной так, чтобы условие «отсечки» электронов выполнялось. Мощность Ni0 ионного пуча на выходе из источника ионов перед входом в преобразователь 6 ионного пучка равна:
Ni0=Ii0⋅UЭЭ (3),
а создаваемая им сила (тяга) Pi0:
Pi0=Ii0⋅M/evi (4)
где
скорость ионов на выходе из источника ионов.
Из (4) и (5) тяга ионного пучка рассчитывается по формуле:

Однако в разряде рабочий газ ионизуется не полностью. И кроме ионного пучка из разрядной камеры выходит поток незаряженных атомов. Этот поток обозначен на Фиг. 4 стрелкой Iа0 25. Величина токов Ii0 и Iа0 определяется коэффициентом ионизации β рабочего газа в разрядной камере 12 так, что:
Ii0=βIm; Iа0=(1-β)Im (7)
При заданном расходе Im коэффициент ионизации β зависит от подведенной к разряду мощности, отнесенной к расходу (в токовых единицах) Ci, измеряемой в Вт/А. Чем выше Ci, тем выше β. Однако всегда β<1.
За счет потока атомов, поступающих в преобразователь 6 ионного пучка, в нем устанавливается равновесная концентрация атомов na. Пучок ускоренных ионов с током Ii0 при прохождении расстояния L, равной длине преобразователя, испытывает резонансную перезарядку, частично преобразуясь в поток быстрых атомов с током I0Б, имеющих ту же энергию, что и ионы на входе в преобразователь. Преобразование потока быстрых ионов в быстрые атомы проходит в соответствии с формулой:
Iаб=Ii0⋅[1-exp(-σianaL)] (8)
Здесь σia - сечение резонансной перезарядки иона на атоме. Величину, заключенную в квадратные скобки, можно назвать коэффициентом преобразования ионного пучка в поток быстрых атомов.
В результате каждого акта перезарядки образуется один быстрый атом и один медленный ион. Образующиеся в объеме преобразователя 6 медленные ионы, обозначенные на Фиг. 4 символом IiМ, в основном, выпадают на внутренние стенки преобразователя 6, превращаясь в медленные атомы. Их уход на стенки объясняется следующими физическими процессами. Медленные ионы создают значительный положительный заряд в объеме преобразователя, под действием которого электроны из нейтрализатора 10 поступают в преобразователь 6, компенсируя этот положительный объемный заряд, так что в объеме преобразователя поддерживается квазинейтральная плазма, в которой концентрации ионов и электронов равны. При этом плазма находится под положительным по отношению к стенкам потенциале Upl, определяемым условием удержания электронов в объеме. При этом устанавливается радиальное электрическое (так называемое амбиполярное) поле E в соответствие с известным соотношением:

здесь Te - температура электронов в эВ, ne, ne0 - концентрация электронов, текущее значение и величина на оси преобразователя, соответственно.
Электрическое поле по (9) действует в ионном пучке и при истечении в вакуум. Именно оно приводит к расходимости ионного пучка, В данном техническом решении на малом расстоянии L воздействие электрического поля происходит на медленные ионы, образующиеся в результате перезарядки быстрых ионов на медленных атомах.
В результате описанных процессов на выходе из преобразователя получаются следующие компонентов потока частиц:
• Атомов высокой энергии с током IаБ (в единицах электрического тока). На Фиг 4 обозначен незаштрихованной стрелкой 24;
• Неперезарядившихся при прохождении преобразователя 6 ионов высокой энергии с током IiБ На Фиг. 4 обозначен заштрихованной стрелкой 27;
• Ионов низкой энергии, не выпавших на стенки с током Iiм. На Фиг. 4 обозначен заштрихованной стрелкой 29;
• Атомов низкой энергии IаМ. На Фиг. 4 обозначен незаштрихованной стрелкой 28.
В силу неразрывности потока частиц выполняются равенства:
Iаб+ Iiб=Ii0; Iiм+Iам=Iа0 (10)
С точки зрения воздействия потока частиц на ОКМ интерес представляют компоненты потока быстрых ионов и атомов. Их соотношение определяется уравнением (8) и при заданной длине преобразователя – концентрацией атомов na.
Без подвода газа непосредственно в преобразователь концентрация атомов определяется только режимом работы инжектора ионов, так как нейтральный газ поступает в него в результате неполной ионизации в источнике (β<1).
Расчет na может быть произведен на основе соотношения:

где va - тепловая скорость атомов при температуре Та (в энергетических единицах - эВ), S - сечение преобразователя потока ионов. После преобразований получим:
здесь D - диаметр преобразователя 6 при его выполнении в виде круглого цилиндрического патрубка.
Приведем оценку преобразования потока при следующих параметрах:
Ii0=1А, β=0,6, D=0,2 м; Ta=0,03 эВ, L=1м, σia=5⋅10-19 м2.
Расчет по формуле (12) даёт значение na=0.9⋅1018 м-3. Из формулы (8) расчетом получаем, что при приведенных параметрах поток быстрых атомов на выходе из преобразователя будет составлять: Iaб=0,7Ii0.
Таким образом, на выходе из преобразователя 6 70% силы потока частиц будет переноситься атомами высокой энергии и 30% - ионами высокой энергии. Отмеченное выше амбиполярное поле будет воздействовать на ионы, вызывая расходимость ионного пучка, но не будет действовать на нейтральные атомы.
На ОКМ будет воздействовать смешанный двухкомпонентный ионно-атомный поток. Схематично, расходимость смешанного ионно-атомного потока частиц высокой энергии в зависимости от расстояния d между КА и ОКМ показан на Фиг. 6. Расходимость ионного компонента потока 27 будет происходить под действием амбиполярного электрического поля, и он достаточно быстро теряет свою компактность, что приведет к низкому значению коэффициента k передачи импульса ОКМ 31 (уравнение (1)). Поток атомов 24 будет сохранять свою компактность при истечении в вакуум космического пространства, так как на него амбиполярное поле не действует, чем и достигается заявленный эффект – возможность увеличения рабочего расстояния между КА и ОКМ за счет более слабой зависимости коэффициента k от расстояния d.
Значение коэффициента β целиком определяется задаваемым режимом работы источника ионов. При заданном расходе газа подвод большей мощности к разрядной камере будет приводить к более высокому значению β. При этом доля непроизводительного расхода газа с компонентами IiМ и I0М будет снижаться, но также и коэффициент преобразования ионов пучка в быстрые атомы будет снижаться.
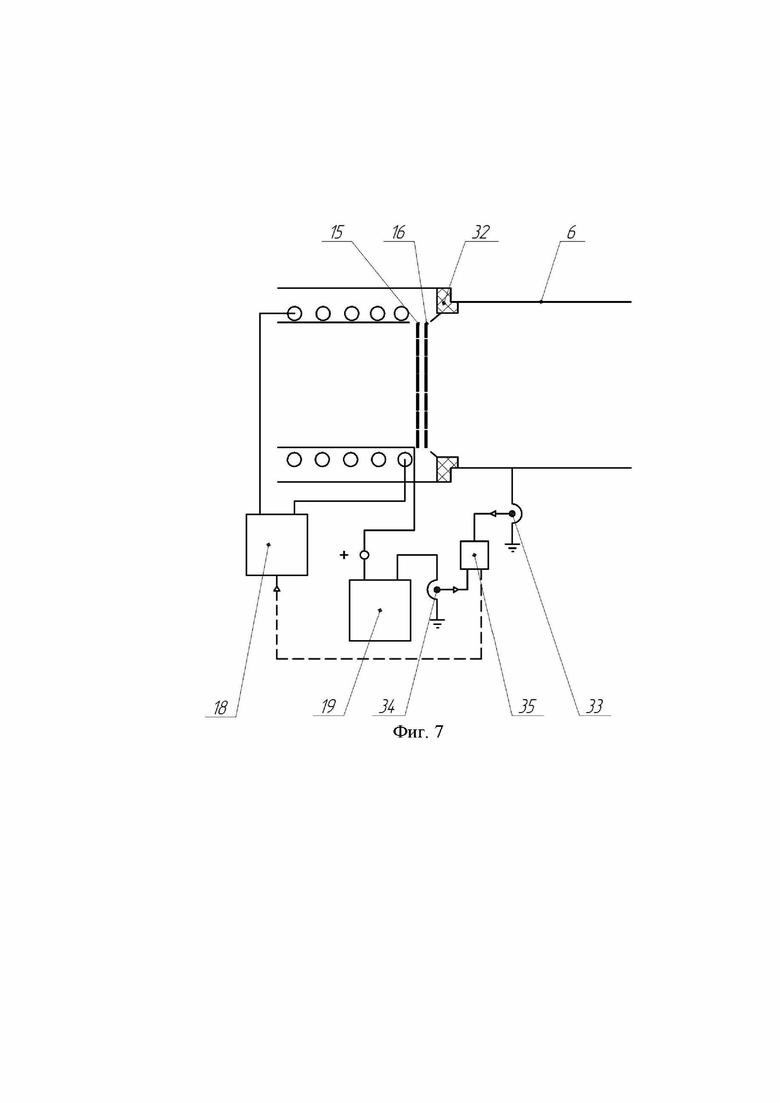
Для более эффективной передачи импульса силы ОКМ необходимо иметь возможность менять режим работы инжектора, оптимизируя его в зависимости от заданной длины преобразователя пучка ионов 6 и расстояния d между КА и ОКМ. Для этого можно использовать обратную связь между величиной потока быстрых атомов и мощностью источника электропитания разряда. Однако, поскольку атомы не несут заряда, величину потока быстрых атомов необходимо определить, как разность тока в цепи электропитания эмиссионного электрода Ii0 и тока Iip ионов перезарядки, выпадающих на стенки преобразователя потока ионов. Этот ток может быть измерен, если преобразователь 6 потока ионов будет гальванически изолирован, для чего в конструкцию инжектора надо ввести разделительный изолятор 32 от замедляющего электрода и установлен датчик 33 ионного тока в цепи его заземления, как показано на Фиг. 7. Обратная связь между преобразователем 6, источниками электропитания 18 и 19 показана пунктирными линиями. Она включает датчик 33 тока в цепи преобразователя 6, датчик тока 34 в цепи источника электропитания 19 эмиссионного электрода 15, блок управления 35. Система работает следующим образом. Сигналы с датчиков 33 и 34 поступают в блок 35, где определяется разность между ними. Полученная величина сравнивается с величиной, задаваемой системой управления КА. На основании разницы этих значений вырабатывается импульс, управляющий мощностью источника 13 электропитания разряда.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ БЕСКОНТАКТНОЙ ТРАНСПОРТИРОВКИ КОСМИЧЕСКИХ ОБЪЕКТОВ | 2014 |
|
RU2568960C1 |
| Способ управления сервисным космическим аппаратом при бесконтактном удалении фрагментов космического мусора | 2019 |
|
RU2720606C1 |
| СПОСОБ ЭЛЕКТРОМАГНИТНОЙ УБОРКИ ЭЛЕКТРОПРОВОДЯЩЕГО КОСМИЧЕСКОГО МУСОРА В ОКОЛОЗЕМНОМ ПРОСТРАНСТВЕ И УСТРОЙСТВО ДЛЯ БЕСКОНТАКТНОГО ЗАХВАТА И УДЕРЖАНИЯ ОДНОГО И БОЛЕЕ ЭЛЕКТРОПРОВОДЯЩИХ ОБЪЕКТОВ КОСМИЧЕСКОГО МУСОРА | 2020 |
|
RU2769807C1 |
| ДВУНАПРАВЛЕННЫЙ ВОЛНОВОЙ ПЛАЗМЕННЫЙ ДВИГАТЕЛЬ ДЛЯ КОСМИЧЕСКОГО АППАРАТА | 2020 |
|
RU2764823C1 |
| СПОСОБ ОЧИСТКИ ОРБИТ ОТ КОСМИЧЕСКОГО МУСОРА | 2012 |
|
RU2531679C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СЕРВИСНОГО КОСМИЧЕСКОГО АППАРАТА | 2019 |
|
RU2714475C1 |
| ГИБРИДНЫЙ ВОЛНОВОЙ ПЛАЗМЕННЫЙ ДВИГАТЕЛЬ ДЛЯ НИЗКООРБИТАЛЬНОГО КОСМИЧЕСКОГО АППАРАТА | 2021 |
|
RU2764487C1 |
| Космический комплекс для утилизации группы объектов крупногабаритного космического мусора | 2018 |
|
RU2695155C1 |
| Способ обнаружения объектов космического мусора и наведения на них космического аппарата с использованием лазерного сканирования пространства | 2023 |
|
RU2813696C1 |
| СПОСОБ КОСМИЧЕСКОГО ЗАХОРОНЕНИЯ РАДИОАКТИВНЫХ ОТХОДОВ В ДАЛЬНЕМ КОСМОСЕ И КОСМИЧЕСКИЙ АППАРАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2492537C1 |
Изобретение относится к области космической техники, а конкретно, к космическим аппаратам (КА) для очистки околоземного пространства от космического мусора (КМ). КА содержит корпус с силовыми элементами, энергетическую установку, систему бесконтактного воздействия на удаляемый объект КМ, содержащую газоразрядный инжектор ионов с трехэлектродной электростатической системой ускорения ионов, и управляющую электроракетную двигательную установку. Система бесконтактного воздействия оснащена преобразователем ионного пучка в виде цилиндрического насадка, установленного на выходе из инжектора ионов, охватывающим ионный пучок, гальванически соединенный с корпусом КА. Длина насадка выбирается из условия задаваемого коэффициента преобразования пучка ионов высокой энергии в пучок атомов высокой энергии. КА содержит систему управления коэффициентом преобразования пучка ионов в пучок быстрых атомов в виде обратной связи между током в цепи преобразователя и током ионного пучка. Достигается повышение эффективности передачи импульса силы ионным пучком удаляемому КМ на больших расстояниях КА от КМ, а также возможность управления движением связки КА-ОКМ. 2 з.п. ф-лы, 7 ил.
1. Космический аппарат для очистки околоземного космического пространства от космического мусора, путем воздействия на удаляемый объект космического мусора ионным пучком, содержащий корпус с силовыми элементами, формирующими платформу, имеющую в своем составе энергетическую установку, включающую панели солнечных батарей, систему бесконтактного воздействия на удаляемый объект космического мусора, содержащую газоразрядный инжектор ионов с трехэлектродной электростатической системой ускорения ионов, выходной электрод которой электрически соединен с корпусом космического аппарата, и управляющую электроракетную двигательную установку, установленную с противоположной от системы бесконтактного воздействия стороны, при этом ось инжектора ионов совпадает с продольной осью связанной системы координат, проходящей через центр масс космического аппарата, систему электропитания и управления электроракетной двигательной установки и систему электропитания и управления системы бесконтактного воздействия, включающую источники электропитания разряда и источники электропитания, подключенные к электродам трехэлектродной электростатической системы ускорения ионов, отличающийся тем, что система бесконтактного воздействия оснащена преобразователем ионного пучка в виде цилиндрического насадка, установленного на выходе из инжектора ионов, охватывающим ионный пучок, гальванически соединенный с корпусом космического аппарата, длина L насадка выбирается из условия задаваемого коэффициента преобразования пучка ионов высокой энергии в пучок атомов высокой энергии с учетом характеристик инжектора ионов.
2. Космический аппарат по п. 1, отличающийся тем, что преобразователь гальванически соединен с корпусом космического аппарата независимо от инжектора ионов и введена система управления коэффициентом преобразования пучка ионов в пучок быстрых атомов в виде обратной связи между током в цепи преобразователя и током ионного пучка, включающая датчик тока в цепи преобразователя, датчик тока в цепи питания эмиссионного электрода трехэлектродной электростатической системы ускорения ионов, при этом оба датчика подключены к блоку управления мощностью источника электропитания разрядом в инжекторе ионов.
3. Космический аппарат по п. 1, отличающийся тем, что оси панелей солнечных батарей солнечной энергетической установки установлены с возможностью их вращения вокруг оси, параллельной оси (OZ)S связанной системы координат космического аппарата, электроракетная двигательная установка содержит два электроракетных двигателя в плоскости OXSYS ортогонально оси (OZ)S, каждый из двигателей установлен на поворотном устройстве на расстоянии LYE относительно оси (OX)S и на равном расстоянии LXE относительно оси (OY)S с возможностью их независимого отклонения в двух взаимно перпендикулярных направлениях на углы ±α1 и ±α2 относительно осей (OX)S и (OZ)S, соответственно.
| WO 2011110701 A1, 15.09.2011 | |||
| СПОСОБ БЕСКОНТАКТНОЙ ТРАНСПОРТИРОВКИ КОСМИЧЕСКИХ ОБЪЕКТОВ | 2014 |
|
RU2568960C1 |
| Способ управления сервисным космическим аппаратом при бесконтактном удалении фрагментов космического мусора | 2019 |
|
RU2720606C1 |
| СПОСОБ ПОЛУЧЕНИЯ И УСКОРЕНИЯ ПЛАЗМЫ И УСКОРИТЕЛЬ ПЛАЗМЫ С ЗАМКНУТЫМ ДРЕЙФОМ ЭЛЕКТРОНОВ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2156555C1 |
| US 10384812 B1, 20.08.2019. | |||

