Изобретение относится к медицинской технике и может быть использовано при выполнении различных медицинских процедур.
Известна функциональная структура выдвижных элементов зажима (удержания) и их позиционное расположение внутри сферического корпуса многофункциональной диагностико-хирургической робототехнической системы с возможностью информационно-компьютерного управления (см. Патент UA №72484), которое включает корпус и выдвижные элементы зажима, которые включают устройство зажима операционных элементов (инструментов) с возможностью двух разворотов и соединенного с устройством промежуточного разворота с помощью первого повода выполняющего функцию шарнира, который с помощью второго повода, который выполняет также функцию шарнира, соединенный с дополнительным устройством осевого разворота зажима, который соединен с корпусом роторной частью повода, закрепленной на выдвижной части линейного повода. При этом корпус робототехнической системы выполнен с внешней сферической поверхностью и с боковым отверстием круглой формы, напротив которого с внутренней стороны сферического корпуса последовательно по кругу расположены и закреплены пять корпусов линейного повода выдвижных элементов зажима, один из их расположен в верхней части сферического корпуса и его выдвижные элементы зажима расположены в вертикальной плоскости сферического корпуса в зоне отверстия круглой формы, по обе стороны вертикальной плоскости сферического корпуса друг над другом расположены по два линейных повода, при этом выдвижные элементы зажима расположены в зоне отверстия круглой формы сферического корпуса, при этом выдвижные элементы зажима верхних линейных поводов позиционно ориентированы к вертикальной плоскости сферического корпуса, а выдвижные элементы зажима нижних линейных поводов позиционно ориентированы от вертикальной плоскости сферического корпуса (прототип).
Известный прототип имеет технические возможности, которые заключаются в том, что выдвижные элементы удержания диагностических и хирургический элементов с линейными приводами в исходном положении находятся в закрытом корпусе робототехнической системы.
Недостатком известной функциональной структуры выдвижных элементов зажима (удержания) диагностических и хирургических корпусов (устройств) с зафиксированными линейными приводами в общем корпусе является функциональная незаконченность робототехнической системы, поскольку она не включает в единой своей конструкции функциональную структуру инструментального стола, где в определенной последовательности расположены диагностические и хирургические корпуса (устройства).
Техническим результатом предложенного изобретения является усовершенствование известной функциональной структуры возвратно-поступательного подъема и разворота элементов в выдвижном механизме удержания корпусов диагностических и хирургических устройств.
Указанный технический результат достигается следующей функциональной структурой.
Функциональная структура возвратно-поступательного подъема и разворота элементов в выдвижном механизме электромагнитного удержания корпусов диагностических и хирургических устройств в тороидальной хирургической робототехнической системе с выдвижной крышкой включает нижнюю и верхнюю части общего корпуса с боковым отверстием круглой формы с крышкой сферической формы, напротив которого с внутренней стороны корпуса последовательно по кругу расположены корпуса линейных поводов с выдвижными элементами с приводами разворота в «Зону приема инструмента» и в «Зону выполнения медицинской процедуры», с устройством удержания диагностических и хирургических устройств, при этом нижняя и верхняя части общего корпуса выполнены тороидальной формы, а боковое отверстие круглой формы выполнено с внутренней стороны тороидального общего корпуса, напротив которого и соосно ему расположена (в исходном положении) с возможностью подъема крышка тороидальной формы, над которой также с возможностью подъема соосно зафиксирована крышка сферической формы, при этом введена общая опорная пластина круглой формы с внутренним отверстием или несколько последовательных пластин в виде секторов, в которой или в которых внутренние и внешние края закреплены внутри нижней части тороидального общего корпуса, а в средней части опорной пластины зафиксированы ортогонально ориентированные корпуса линейных приводов 6, выдвижная часть которых ориентирована вертикально вверх.
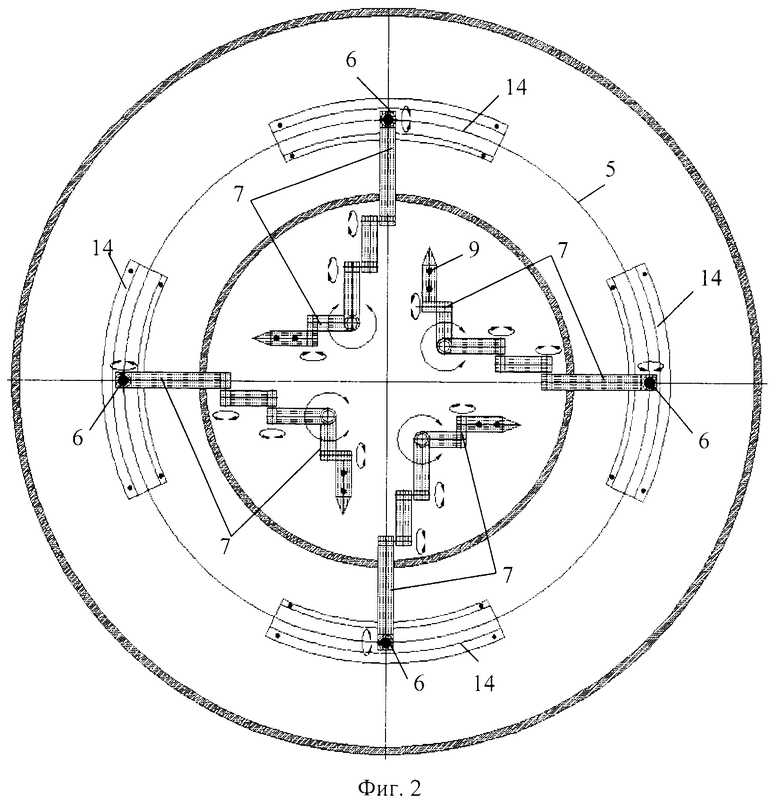
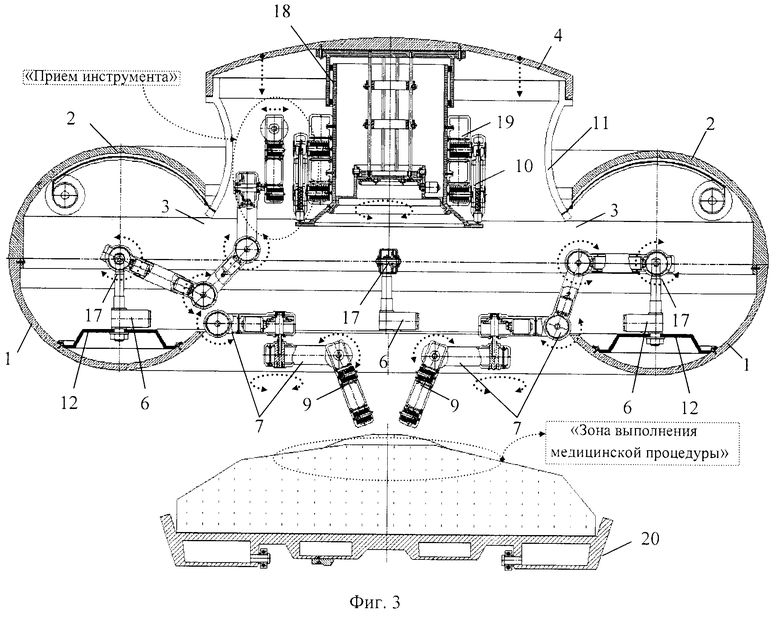
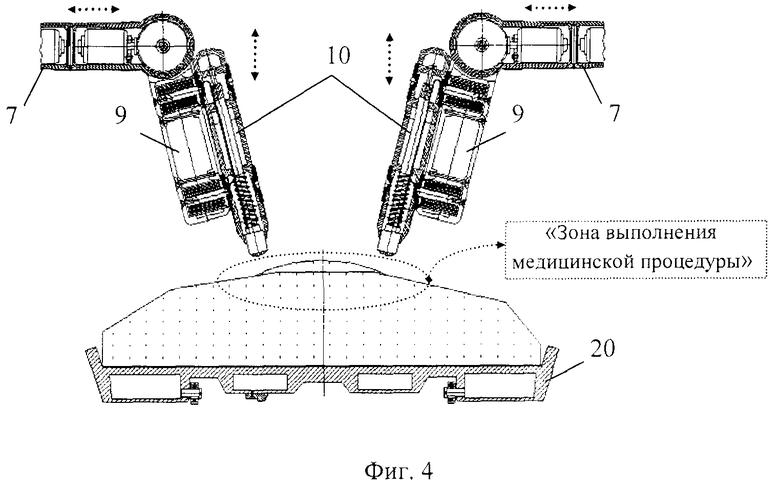
На фиг. 1 изображена общая опорная пластина круглой формы с последовательно закрепленными ортогонально ориентированными корпусами линейных приводов, выдвижная часть которых ориентирована вертикально вверх. На фиг. 2 изображено позиционно расположенными в нижней части общего тороидального корпуса несколько последовательных пластин в виде секторов с соответствующим линейным приводом и выдвижными элементами. На фиг. 3 изображена тороидальная хирургическая робототехническая система с выдвижной крышкой. На фиг. 4 изображено позиционное положение выдвижных механизмов электромагнитного удержания корпусов диагностических и хирургических устройств в «Зоне выполнения медицинской процедуры.
Функциональная структура возвратно-поступательного подъема и разворота элементов в выдвижном механизме электромагнитного удержания корпусов диагностических и хирургических устройств в тороидальной хирургической робототехнической системе с выдвижной крышкой включает (фиг. 3) нижнюю 1 и верхнюю 2 части общего корпуса с боковым отверстием 3 круглой формы с крышкой 4 сферической формы, напротив которого с внутренней стороны корпуса последовательно по кругу 5 (фиг. 2) расположены корпуса линейных поводов 6 (фиг. 1-2) с выдвижными элементами 7 с приводами разворота 8 в «Зону приема инструмента» и в «Зону выполнения медицинской процедуры» (фиг. 3), с устройством удержания 9 диагностических и хирургических устройств 10. При этом нижняя 1 (фиг. 3) и верхняя 2 части общего корпуса выполнены тороидальной формы, а боковое отверстие круглой формы 3 выполнено с внутренней стороны тороидального общего корпуса, напротив которого и соосно ему расположена (в исходном положении) с возможностью подъема крышка тороидальной формы 11, над которой также с возможностью подъема соосно зафиксирована крышка 4 сферической формы, при этом введена общая опорная пластина 12 (фиг. 1) круглой формы с внутренним отверстием 13 или несколько последовательных пластин 14 (фиг. 2) в виде секторов, в которой или в которых внутренние 15 (фиг. 1) и внешние 16 края закреплены внутри нижней части 1 (фиг. 1) тороидального общего корпуса, а в средней части опорной пластины 12 зафиксированы ортогонально ориентированные корпуса линейных приводов 6, выдвижная часть 17 которых ориентирована вертикально вверх. На фиг. 3 изображена тороидальная хирургическая робототехническая система с выдвижной крышкой 4 сферической формы, внутри которой и соосно ей закреплена цилиндрическая часть 18 инструментального стола с устройством соосного разворота электромагнитных устройств 19 фиксации диагностических и хирургических устройств 10. На фиг. 4 изображено одно из возможных позиционных положений электромагнитных устройств удержания 9 выдвижной системы 7 с хирургическими и диагностическими устройствами 10 в «Зоне выполнения медицинской процедуры» над подвижной частью медицинского стола 20, которая реализована с возможностью возвратно-поступательного смещения относительно тороидальной робототехнической системы (фиг. 3).
Процедура возвратно-поступательного подъема и разворота элементов в выдвижном механизме электромагнитного удержания корпусов диагностических и хирургических устройств в тороидальной хирургической робототехнической системе с выдвижной крышкой заключается в следующем.
Перед началом выполнения медицинских процедур (в исходном положении) в тороидальной хирургической робототехнической системе крышка тороидальной формы 11 с крышкой 4 сферической формы, которая включает устройство соосного разворота электромагнитных устройств 19 фиксации диагностических и хирургических устройств 10, позиционно расположена напротив бокового отверстия круглой формы 3, которое выполнено с внутренней стороны нижней 1 (фиг. 3) и верхней 2 части тороидального общего корпуса, внутри которого в средней части опорной пластины 12 зафиксированы ортогонально ориентированные корпуса линейных приводов 6, выдвижная часть 17 которых ориентирована вертикально вверх. А на конце выдвижной части 17 в «свернутом» состоянии закреплены с возможностью разворота четыре последовательных выдвижных элемента с приводами разворота 8 (фиг. 1). При выполнении медицинской процедуры выполняют поднятие (фиг. 3) крышки тороидальной формы 11 с устройством соосного разворота электромагнитных устройств 19 фиксации диагностических и хирургических устройств 10 для формирования зоны «Приема инструмента» и разворачивают выдвижные элементы 7 предварительно в зону «Приема инструмента» для выбора необходимого хирургического или диагностического устройства 10 и посредством электромагнитных устройств удержания 9 выдвижной системы 7 фиксируют их, а затем разворачивают выдвижные элементы 7 в «Зону выполнения медицинской процедуры», которая может быть смещена над подвижной частью медицинского стола 20, поскольку она выполнена с возможностью возвратно-поступательного смещения относительно тороидальной хирургической робототехнической системы. При этом поперечное смещение диагностических и хирургических устройств 10 относительно подвижной частью медицинского стола 20 выполняют посредством соответствующего разворота выдвижных элементов 7, а вертикальное смещение диагностических и хирургических устройств 10 выполняют посредством линейных выдвижной части 17 приводов 6.
Использование предложенного технического решения позволяет расширить процедурные возможности функциональной структуры возвратно-поступательного подъема и разворота элементов в выдвижном механизме электромагнитного удержания корпусов диагностических и хирургических устройств в тороидальной хирургической робототехнической системе с выдвижной крышкой.
Изобретение относится к медицинской технике и может быть использовано при выполнении различных медицинских процедур. Функциональная структура возвратно-поступательного подъема и разворота элементов в выдвижном механизме электромагнитного удержания корпусов диагностических и хирургических устройств в тороидальной хирургической робототехнической системе с выдвижной крышкой включает нижнюю и верхнюю части общего корпуса с боковым отверстием круглой формы с крышкой сферической формы, напротив которого с внутренней стороны корпуса последовательно по кругу расположены корпуса линейных приводов с выдвижными элементами с приводами разворота в «Зону приема инструмента» и в «Зону выполнения медицинской процедуры», с устройством удержания диагностических и хирургических устройств, при этом нижняя и верхняя части общего корпуса выполнены тороидальной формы, а боковое отверстие круглой формы выполнено с внутренней стороны тороидального общего корпуса, напротив которого и соосно ему расположена (в исходном положении) с возможностью подъема крышка тороидальной формы, над которой также с возможностью подъема соосно зафиксирована крышка сферической формы, при этом в нижней части общего тороидального корпуса ее нижняя часть выполнена плоской формы, в средней части которой выполнен вертикальный выступ, ориентированный вверх, а в средней части его зафиксированы ортогонально ориентированные корпуса линейных приводов, выдвижная часть которых ориентирована вертикально вверх. 4 ил.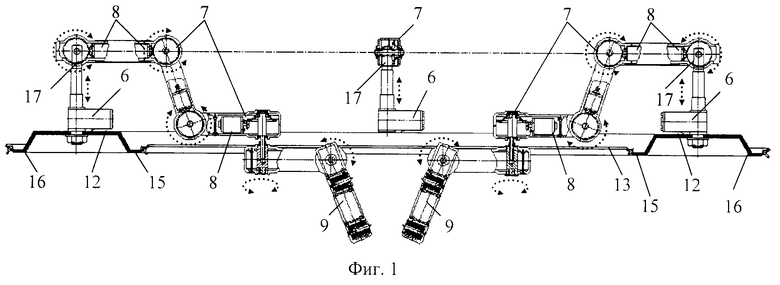
Функциональная структура возвратно-поступательного подъема и разворота элементов в выдвижном механизме электромагнитного удержания корпусов диагностических и хирургических устройств в тороидальной хирургической робототехнической системе с выдвижной крышкой, включающая нижнюю и верхнюю части общего корпуса с боковым отверстием круглой формы с крышкой сферической формы, напротив которого с внутренней стороны корпуса последовательно по кругу расположены корпуса линейных приводов с выдвижными элементами с приводами разворота в «Зону приема инструмента» и в «Зону выполнения медицинской процедуры», с устройством удержания диагностических и хирургических устройств, отличающаяся тем, что нижняя и верхняя части общего корпуса выполнены тороидальной формы, а боковое отверстие круглой формы выполнено с внутренней стороны тороидального общего корпуса, напротив которого и соосно ему расположена (в исходном положении) с возможностью подъема крышка тороидальной формы, над которой также с возможностью подъема соосно зафиксирована крышка сферической формы, при этом введена общая опорная пластина круглой формы с внутренним отверстием или несколько последовательных пластин в виде секторов, в которой или в которых внутренние и внешние края закреплены внутри нижней части тороидального общего корпуса, а в средней части опорной пластины зафиксированы ортогонально ориентированные корпуса линейных приводов, выдвижная часть которых ориентирована вертикально вверх.
| Электронно-лучевая лампа | 1941 |
|
SU72848A1 |
| Метод распознавания окисляющих углеводороды бактерий при геомикробиологической разведке нефтяных и газовых месторождений | 1947 |
|
SU72498A1 |
| Прибор для микроскопического анализа минералов по методу точек | 1940 |
|
SU72499A1 |
| Устройство для стереотаксических операций | 1985 |
|
SU1306572A1 |
| JPH 06205809 A, 26.07.1994 | |||

