Изобретение относится к медицинской технике и может быть использовано при выполнении различных медицинских процедур.
Известна функциональная структура горизонтального разворота функционального элемента УЗИ выдвижной системы сферического корпуса многофункционального диагностико-хирургической робототехнической системы с возможностью информационно компьютерного управления (см. Патент UA №72487), которое включает вертикальный корпус операционного стола с возможностью изменения высоты, который позиционно расположен в основании вертикального корпуса, которое закреплено на неподвижной поверхности и выполнено в виде цилиндра с внешними ребрами жесткости, внутри которого зафиксирована нижняя часть вертикального корпуса, выполненного в виде двух соосных цилиндров внешнего и внутреннего с возможностью поворотно-поступательного сдвига внутреннего цилиндра корпуса относительно внешнего цилиндра корпуса с помощью линейного повода, а также включает дополнительный вертикальный корпус с крышкой и повод для ее разворота, к которой с разворотом на 120° зафиксированы три подъемных устройства индивидуального подъема корпусов с сферической внешней поверхностью с диагностическим выдвижным устройством с зажимом и возможностью горизонтального разворота и хирургическими элементами, который отличается тем, что устройство горизонтального разворота аппарата диагностики выдвижной его части выполнено в виде Г-образного корпуса, который состоит из верхней части и нижней его части для приема и содержания диагностического аппарата УЗИ, верхняя часть корпуса которого выполнена в виде стержня с осевым отверстием для расположения контактной первой пружины с направляющими стержнем, который закреплен внутри вертикальной половины Г-образного корпуса горизонтального разворота диагностического аппарата УЗИ, при этом соосно на направляющем стержне в верхней его части расположена вторая контактная пружина, которая верхней своей частью закреплена внутри вертикальной половины Г-образного корпуса горизонтального разворота, а нижней ее частью соединена с упругой втулкой, зафиксированной на верхней части стержня с осевым отверстием, которые совместно выполняют функцию зажима, при этом в горизонтальной части Г-образного корпуса выполнено сквозное отверстие, в котором расположена верхняя часть осевого стержня конической шестеренки, которая расположена внутри выдвижного устройства, а крайняя горизонтальная часть Г-образного корпуса соединена с конической шестеренкой, которая функционально связана с конической шестеренкой редуктора повода разворота, корпус которого закреплен внутри выдвижного устройства (прототип).
Известный прототип имеет технические возможности, которые заключаются в том, что диагностический аппарат, в частности устройство УЗИ, расположен в отдельном корпусе, который функционально связан с выдвижными элементами робототехнической системы.
Недостатком известной функциональной структуры корпуса хирургических и диагностических устройств является отсутствие конструктивной независимости их от отдельных выдвижных элементов хирургической робототехнической системы.
Техническим результатом предложенного изобретения является усовершенствование известной функциональной структуры хирургической робототехнической системы.
Указанный технический результат достигается следующей функциональной структурой.
Функциональная структура электромагнитного корпуса хирургических и диагностических устройств тороидальной хирургической робототехнической системы с выдвижной крышкой, включающая выдвижные элементы робототехнической системы для выполнения медицинских процедур над медицинским столом, а также включает инструментальный стол с возможностью подъема и возвратно-поступательного разворота с корпусами, в которых зафиксированы хирургические и диагностические устройства, при этом корпус хирургических и диагностических устройств выполнен из двух половин с возможностью совместной фиксации, в верхней и нижней части которых с двух противоположных сторон и ортогонально их совместному соединению выполнены прямоугольные пазы для удержания их в двух смещенных друг относительно друга двух П-образных пластинах с упругими сторонами для удержания корпусов хирургических и диагностических устройств, которые последовательно с равным шагом по кругу зафиксированы на внешней поверхности медицинского стола, при этом между прямоугольными пазами и ортогонально им на внешней стороне корпуса хирургических и диагностических устройств закреплены две активные круглые ферримагнитные контактные пластины с соосным коническим или сферическим пазом, которые электрически соединены с хирургическими и диагностическими устройствами для подачи на них напряжения в контакте с выдвижными элементами робототехнической системы.
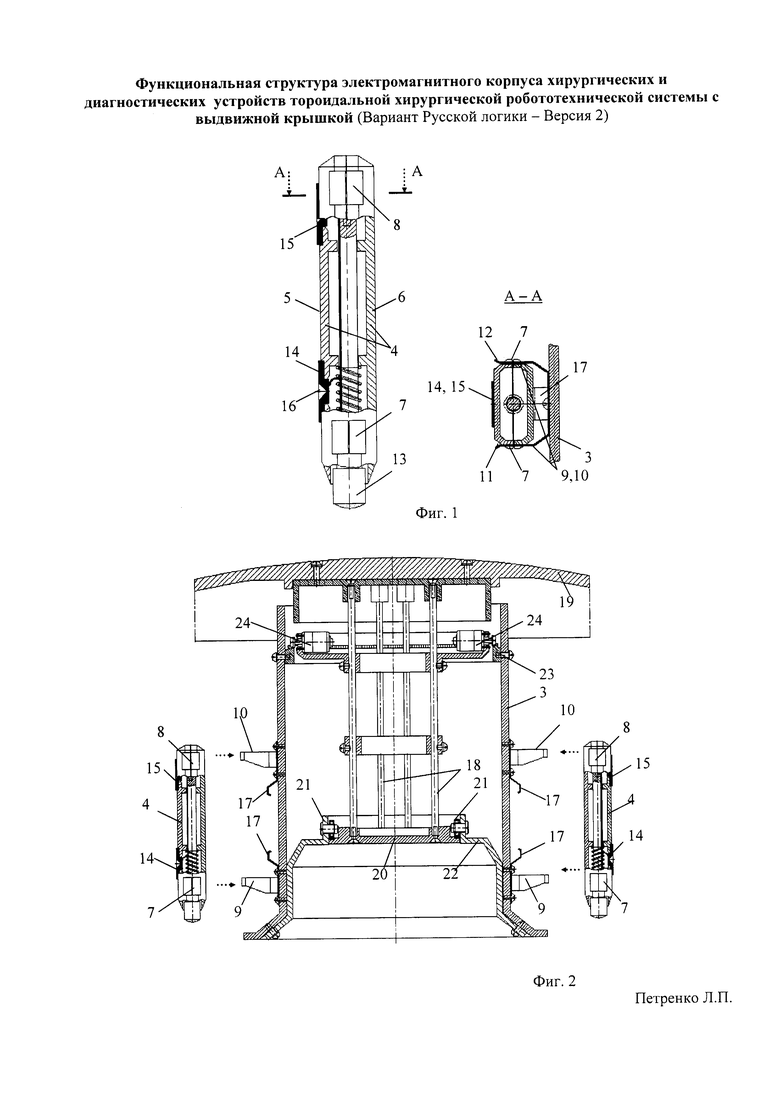
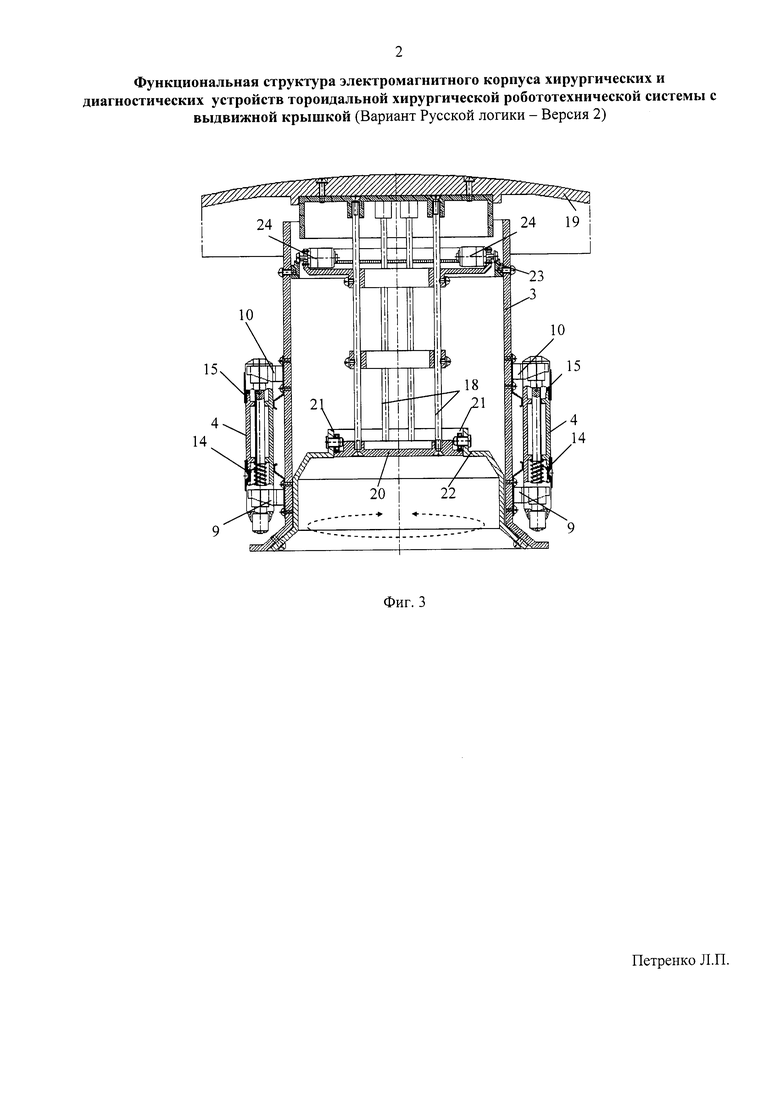
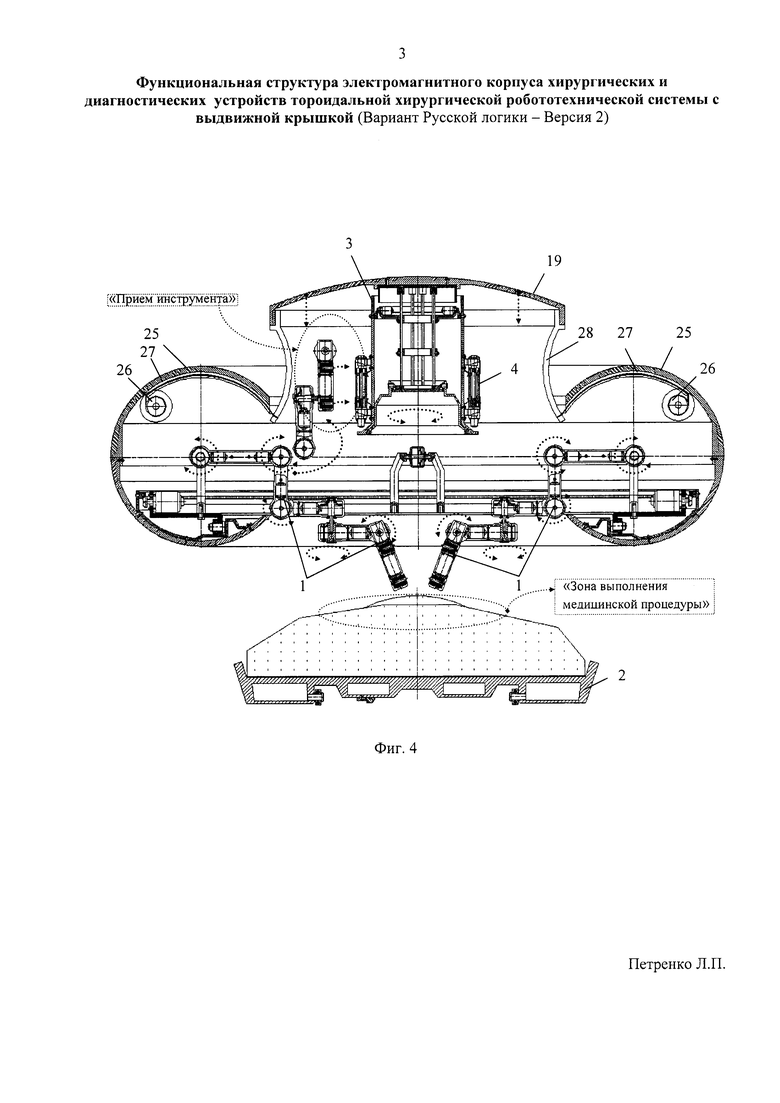
На фиг. 1 изображена функциональная структура электромагнитного корпуса хирургических и диагностических устройств тороидальной хирургической робототехнической системы с выдвижной крышкой с двумя активными круглыми ферримагнитными контактными пластинами, которые электрически подключены к хирургическим и диагностическим устройствам для подачи на них напряжения. На фиг. 2 изображен цилиндрический или многогранный корпус инструментального стола, в котором на внешней поверхности по кругу с равным шагом закреплены в вертикальных плоскостях и смещенные друг относительно друга два П-образных фиксатора с двумя упругими сторонами удержания корпусов хирургических и диагностических устройств и позиционное положение до момента их фиксации. На фиг. 3 изображена конструкция инструментального стола с корпусами хирургических и диагностических устройств. На фиг. 4 изображено позиционное положение тороидальной хирургической робототехнической системы с выдвижной крышкой с инструментальным столом и выдвижными элементами удержания корпусов хирургических и диагностических устройств в зоне «Прием инструмента» и позиционное положение выдвижных элементов удержания корпусов хирургических и диагностических устройств в «Зона выполнения медицинской процедуры» над верхней частью подвижной частью медицинского стола.
Функциональная структура электромагнитного корпуса хирургических и диагностических устройств тороидальной хирургической робототехнической системы с выдвижной крышкой, включающая (фиг. 4) выдвижные элементы 1 робототехнической системы для выполнения медицинских процедур над медицинским столом 2, а также включает инструментальный стол 3 с возможностью подъема и возвратно-поступательного разворота с корпусами 4, в которых зафиксированы хирургические и диагностические устройства, при этом корпус 4 хирургических и диагностических устройств выполнен (фиг. 1) из двух половин 5 и 6 с возможностью совместной фиксации, в верхней и нижней части которых с двух противоположных сторон и ортогонально их совместному соединению выполнены прямоугольные пазы 7 и 8 для удержания их в (фиг. 2) двух смещенных друг относительно друга двух П-образных пластинах 9 и 10 с упругими сторонами 11 и 12 (фиг. 1) для удержания корпусов 4 хирургических и диагностических устройств 13, которые (фиг. 2 и 3) последовательно с равным шагом по кругу зафиксированы на внешней поверхности медицинского стола 3, при этом между прямоугольными пазами 7 и 8 и ортогонально им (фиг. 1) на внешней стороне корпуса 4 хирургических и диагностических устройств 13 закреплены две активные круглые ферримагнитные контактные пластины 14 и 15 с соосным коническим или сферическим пазом 16, которые электрически соединены с хирургическими и диагностическими устройствами 13 для подачи на них напряжения в контакте с выдвижными элементами 1 робототехнической системы. При этом П-образные пластины 9 и 10 с упругими сторонами 11 и 12 удержания корпусов 4 выполнены (фиг. 2) с ограничительными пластинами 17, ограничивающими смещения хирургических и диагностических устройств 4 в радиальной плоскости медицинского стола 3. При этом (фиг. 2) внутри и соосно инструментальному столу 3 по кругу расположены стержни 18, верхние концы которых закреплены в нижней части выдвижной крышки 19 робототехнической системы, а нижние концы стержней 18 зафиксированы на верхней части круглой пластины 20, на краю верхней поверхности которой расположены опорные подшипники 21 возвратно-поступательного разворота инструментального стола 3, которые посредством втулки 22 функционально связаны с нижней частью корпуса инструментального стола 3, а внутри в верхней части инструментального стола 3 закреплена шестеренка 23, которая функционально соединена с шестеренкой одного или нескольких приводов с редуктором 24, которые зафиксированы в верхней части стержней 18 для возвратно-поступательного разворота инструментального стола 3. На фиг. 3 изображен инструментальный стол 3 с зафиксированными корпусами 4 хирургических и диагностических устройств. На фиг. 4 изображено позиционное положение тороидальной хирургической робототехнической системы с общим тороидальном корпусом 25 с выдвижной крышкой 19 с инструментальным столом 3 и выдвижными элементами 1 удержания корпусов 4 хирургических и диагностических устройств в зоне «Прием инструмента» и позиционное положение выдвижных элементов 1 удержания корпусов 4 хирургических и диагностических устройств в «Зоне выполнения медицинской процедуры» над верхней частью подвижной частью медицинского стола 2. При этом внутри верхней части тороидального корпуса 25 для поднятия выдвижной крышки 19 в секторе 120° расположены три привода подъема 26 с тросами 27, которые с одной стороны зафиксированы на цилиндрическом устройстве привода подъема 26, а с другой стороны три троса 27 закреплены в нижней части выдвижной внутренней части 28 тороидального корпуса 25. При этом выдвижная крышка 19 с инструментальным столом 3 выполнена с возможностью снятия с выдвижной внутренней части 28 тороидального корпуса 25 для установки в соответствующих фиксаторах корпусов 4 хирургических и диагностических устройств и последующего возвращения выдвижной крышки 19 в исходное положение для выполнения конкретной медицинской процедуры в зоне ее выполнения над верхней подвижной частью медицинского стола 2.
Процедура фиксации корпуса хирургических и диагностических устройств тороидальной хирургической робототехнической системы с выдвижной крышкой заключается в следующем.
Перед выполнением медицинской процедуры (фиг. 4) до поднятия выдвижной крышки 19 с инструментальным столом 3 и выдвижной внутренней части 28 тороидального корпуса 25 или после их поднятия посредством тросов 27 и привода подъема 26 выполняют снятие выдвижной крышки 19 с инструментальным столом 3 и (фиг. 2 и 3) выполняют последовательную установку корпусов 4 хирургических и диагностических устройств в прямоугольных пазах 7 и 8 (фиг. 1) П-образных пластин 9 и 10 пассивных фиксаторов для их удержания, после чего выполняют необходимые действия (фиг. 4) в зоне «Прием инструмента» и в «Зоне выполнения медицинской процедуры» над медицинским столом 2.
Использование предложенного технического решения позволяет расширить процедурные возможности функциональной структуры тороидальной хирургической робототехнической системы с выдвижной крышкой, поскольку любой корпус хирургических и диагностических устройств в зоне «Прием инструмента» доступен любому выдвижному элементу робототехнической системы.
Изобретение относится к медицинской технике и может быть использовано при выполнении различных медицинских процедур. Функциональная структура электромагнитного корпуса хирургических и диагностических устройств тороидальной хирургической робототехнической системы с выдвижной крышкой, включающая выдвижные элементы робототехнической системы для выполнения медицинских процедур над медицинским столом, а также включает инструментальный стол с возможностью подъема и возвратно-поступательного разворота с корпусами, в которых зафиксированы хирургические и диагностические устройства, при этом корпус хирургических и диагностических устройств выполнен из двух половин с возможностью совместной фиксации, в верхней и нижней части которых с двух противоположных сторон и ортогонально их совместному соединению выполнены прямоугольные пазы для удержания их в двух смещенных друг относительно друга двух П-образных пластинах с упругими сторонами для удержания корпусов хирургических и диагностических устройств, которые последовательно с равным шагом по кругу зафиксированы на внешней поверхности медицинского стола, при этом между прямоугольными пазами и ортогонально им на внешней стороне корпуса хирургических и диагностических устройств закреплены две активные круглые ферромагнитные контактные пластины с соосным коническим или сферическим пазом, которые электрически соединены с хирургическими и диагностическими устройствами для подачи на них напряжения в контакте с выдвижными элементами робототехнической системы. 4 ил.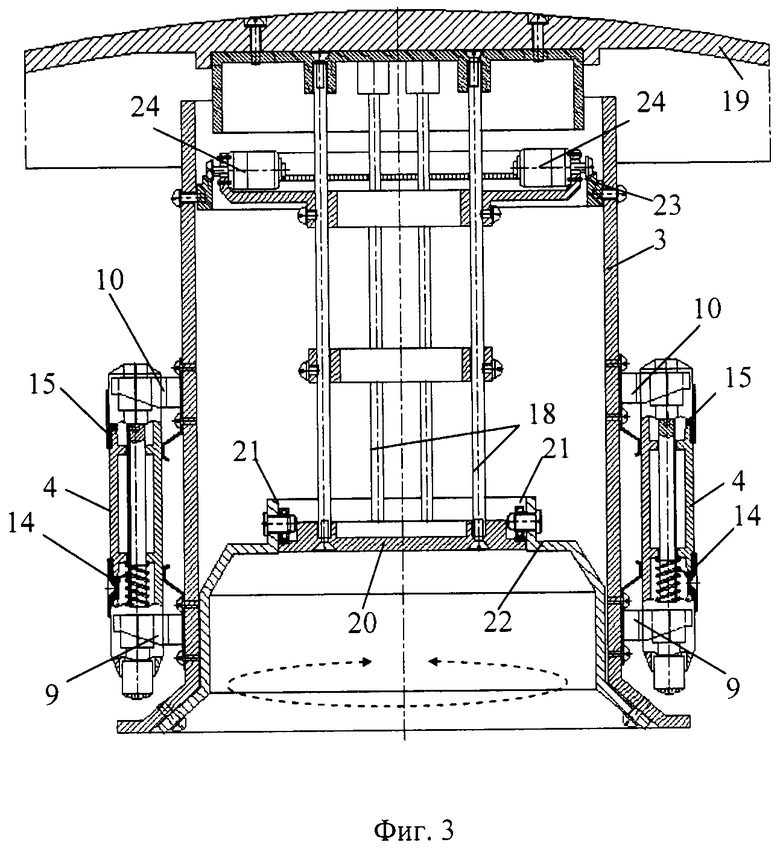
Функциональная структура электромагнитного корпуса хирургических и диагностических устройств тороидальной хирургической робототехнической системы с выдвижной крышкой, включающая выдвижные элементы робототехнической системы для выполнения медицинских процедур над медицинским столом, а также включает инструментальный стол с возможностью подъема и возвратно-поступательного разворота с корпусами, в которых зафиксированы хирургические и диагностические устройства, отличающаяся тем, что корпус хирургических и диагностических устройств выполнен из двух половин с возможностью совместной фиксации, в верхней и нижней части которых с двух противоположных сторон и ортогонально их совместному соединению выполнены прямоугольные пазы для удержания их в двух смещенных друг относительно друга двух П-образных пластинах с упругими сторонами для удержания корпусов хирургических и диагностических устройств, которые последовательно с равным шагом по кругу зафиксированы на внешней поверхности медицинского стола, при этом между прямоугольными пазами и ортогонально им на внешней стороне корпуса хирургических и диагностических устройств закреплены две активные круглые ферромагнитные контактные пластины с соосным коническим или сферическим пазом, которые электрически соединены с хирургическими и диагностическими устройствами для подачи на них напряжения в контакте с выдвижными элементами робототехнической системы.
| Способ получения альфа-оксиантрахинонсульфоновых кислот | 1947 |
|
SU72484A1 |
| Способ борьбы с искажениями телеграфных сигналов | 1946 |
|
SU72485A1 |
| Метод распознавания окисляющих углеводороды бактерий при геомикробиологической разведке нефтяных и газовых месторождений | 1947 |
|
SU72498A1 |
| JP 2010206495 A, 16.09.2010 | |||
| JPH 06205809 A, 26.07.1994 | |||
| US 4872657 A, 10.10.1989 | |||
| Устройство для стереотаксических операций | 1985 |
|
SU1306572A1 |

