Изобретение относится к области преобразовательной техники, предназначено для управления автономными инверторами с широтно-импульсной модуляцией (ШИМ) и может быть использовано для частотного регулирования скорости асинхронного двигателя. Предложенный способ может быть использован для управления как полумостовыми, так и мостовыми инверторами с различным числом фаз, а также инверторами, управляемыми посредством однополярных модулирующих и опорных сигналов. Кроме того, предложенный способ управления может быть использован для управления трехфазными автономными инверторами с введенными в синусоидальный модулирующий сигнал компонентами нулевой последовательности.
Известен способ управления автономным инвертором, заключающийся в сравнении высокочастотного опорного напряжения треугольной или пилообразной формы и низкочастотного модулирующего напряжения прямоугольной формы, результатом которого является формирование серии импульсов одинаковой длительности, величина которой зависит от амплитуды прямоугольного модулирующего напряжения [Руденко B.C., Сенько В.И., Чиженко И.М. Основы преобразовательной техники: Учебник для вузов. - М.: Высш. школа, 1980. - 424 с. (стр.267, рис.4.63)].
Недостатком известного способа управления является низкое качество выходного напряжения, а именно неудовлетворительный спектральный состав напряжения во всем диапазоне его регулирования.
Известен способ управления автономным инвертором (прототип), заключающийся в сравнении высокочастотного опорного напряжения треугольной или пилообразной формы и низкочастотного модулирующего напряжения, например синусоидальной формы, результатом которого является формирование серии импульсов, длительность которых изменяется по закону модулирующего сигнала [Руденко B.C., Сенько В.И., Чиженко И.М. Основы преобразовательной техники: Учебник для вузов. - М.: Высш. школа, 1980. - 424 с. (стр.244, рис.4.45)].
Недостатком этого способа управления является ограниченный линейный диапазон регулирования амплитуды 1-й гармонии выходного напряжения автономного инвертора, что приводит к недоиспользованию его источника питания.
Линейный диапазон регулирования 1-й гармонии имеет место до тех пор, пока амплитуда модулирующего напряжения не превышает амплитуды опорного сигнала. При дальнейшем увеличении модулирующего напряжения (область перемодуляции) амплитуда 1-й гармоники также будет возрастать, но по резко выраженному нелинейному закону, что мало приемлемо для целей управления выходным напряжением. Упомянутая нелинейность в области перемодуляции обусловлена тем, что по мере увеличения амплитуды модулирующего напряжения происходит слияние соседних импульсов управления ключами автономного инвертора и, соответственно, импульсов выходного напряжения инвертора. И на этих участках теряется управляемость - зависимость ширины импульсов от амплитуды модулирующего сигнала. В пределе все импульсы управления сливаются в один 180-градусный (на полупериоде выходного напряжения) импульс. Данный режим характеризуется отсутствием широтно-импульсной модуляции, но максимально возможной амплитудой 1-й гармоники выходного напряжения автономного инвертора.
Задача изобретения заключается в расширении линейного диапазона регулирования амплитуды 1-й гармоники выходного напряжения автономного инвертора вплоть до максимально возможного значения.
Указанная задача достигается тем, что в известном способе управления автономным инвертором, основанном на сравнении высокочастотного опорного напряжения треугольной или пилообразной формы и низкочастотного модулирующего напряжения, при амплитуде последнего больше амплитуды опорного напряжения в модулирующее напряжение вводят дополнительный сигнал прямоугольной биполярной формы той же частоты и фазы с амплитудой, пропорциональной разности амплитуд модулирующего и опорного напряжений, причем исходный модулирующий сигнал соответствующим образом ослабляют, так чтобы амплитуда суммарного модулирующего напряжения оставалась равной амплитуде опорного напряжения.
Сущность изобретения поясняется графическими материалами, где на фиг.1 - устройство для реализации предложенного способа управления, на фиг.2 - схема автономного, например трехфазного, инвертора для реализации способа, на фиг.3-7 - графики, поясняющие реализацию предлагаемого способа управления при разной глубине модуляции, на фиг.8 - регулировочные характеристики трехфазного автономного инвертора при управлении предложенным способом управления и способом-прототипом.
Устройство управления трехфазным автономным инвертором (фиг.1) содержит: источник 1 эталонного постоянного напряжения, блок 2 делителя напряжения, потенциометр 3, генератор 4 опорного напряжения, трехфазный генератор 5 модулирующего напряжения, сумматоры 6 и 7, компаратор 8, блок 9 усиления, блок 10 деления, каналы 11-13 сравнения, каждый из которых в свою очередь содержит блок 14 перемножения, компаратор 15, сумматор 16, блок 17 перемножения, мультиплексор 18, компаратор 19 с прямым и инверсным выходами.
Выход источника 1 эталонного постоянного напряжения подключен к входу блока 2 делителя напряжения и к потенциометру 3, выход блока 2 делителя напряжения подключен к входу генератора 4 опорного напряжения, к вычитающему входу сумматора 6, к суммирующему входу сумматора 7, выход (бегунок) потенциометра 3 подключен к одному из входов компаратора 8, к суммирующему входу сумматора 6, к входу трехфазного генератора 5 модулирующего напряжения и к входу делителя (знаменателя) блока 10 деления, выход генератора 4 опорного напряжения подключен к первым входам (нумерация сверху) каналов 11-13 сравнения, выход компаратора 8 подключен к вторым входам каналов 11-13 сравнения, выход сумматора 6 подключен к входу блока 9 усиления, выход которого подключен к вычитающему входу сумматора 7 и к пятым входам каналов 11-13 сравнения, выход сумматора 7 подключен к входу делимого блока 10 деления, выход которого подключен к третьим входам каналов 11-13 сравнения, три выхода генератора 5 модулирующего напряжения подключены к четвертым входам соответствующих каналов 11-13 сравнения. Внутри каждого из каналов 11-13 сравнения первый вход подключен к второму входу компаратора 19, второй вход каналов 11-13 сравнения подключен к управляющему входу мультиплексора 18, третий вход каналов 11-13 сравнения подключен к одному из входов блока 14 перемножения, четвертый вход каналов 11-13 сравнения подключен к второму входу блока 14 перемножения, к первому входу компаратора 15, второй выход которого подключен к нулю, а также к первому входу мультиплексора 18, пятый вход каналов 11-13 сравнения подключен к одному из входов блока 17 перемножения, ко второму входу которого подключен выход компаратора 15, выход блока 17 перемножения подключен к одному из входов сумматора 16, к второму входу которого подключен выход блока 14 перемножения, выход сумматора 16 подключен к второму входу мультиплексора 18, выход которого подключен к первому входу компаратора 19. Прямой и инверсный выходы компараторов 19 далее подключаются соответственно к управляющим входам 1-го и 2-го ключа соответствующего полумоста автономного инвертора.
Генератор опорного напряжения, например, треугольной формы может быть построен по схеме RC-генератора на операционном усилителе [Казьмерковский М., Вуйцак А. Схемы управления и измерения в промышленной электронике: Пер с польск. - М.: Энергоатомиздат, 1983. - 224 с. (стр.84, рис.3.14)]. Трехфазный генератор модулирующего напряжения, например синусоидальной формы, может быть реализован, на основе ступенчатой аппроксимации гармонического сигнала путем использования постоянной программируемой памяти и цифроаналогового преобразователя [Казьмерковский М., Вуйцак А. Схемы управления и измерения в промышленной электронике: Пер с польск. - М.: Энергоатомиздат, 1983. - 224 с. (стр.121, рис.3.49)].
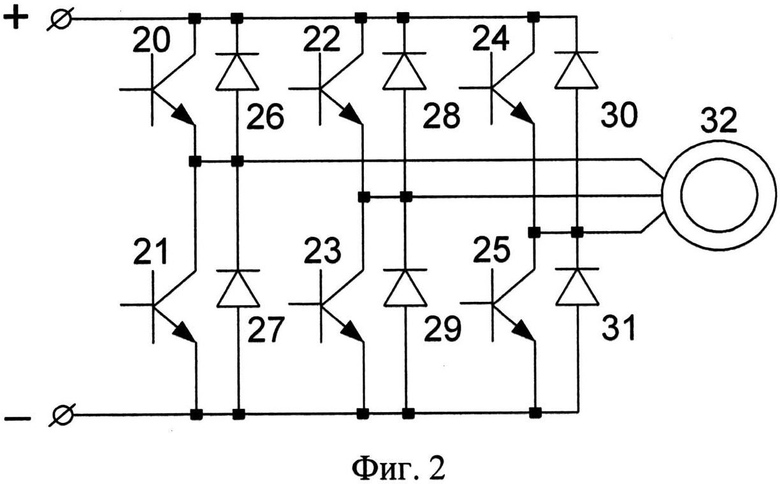
Автономный инвертор (фиг.2) содержит три полумоста полностью управляемых ключей 20-25 и три полумоста неуправляемых обратных вентилей 26-31. Каждый из полумостов фазы инвертора содержит последовательно соединенные первый и второй ключ, подключенные соответственно к положительному и отрицательному выводу источника питания, а средней точкой к соответствующей фазе асинхронного двигателя 32.
В устройстве для реализации предложенного способа управления (см. фиг.1) напряжение с источника 1 эталонного постоянного напряжения через блок 2 деления напряжения задает амплитуду треугольного опорного напряжения, а также через потенциометр 3 амплитуду и частоту выходных сигналов трехфазного генератора 5 синусоидального модулирующего напряжения. Примем для простоты величину сигнала на выходе блока 2 деления напряжения в относительных величинах равной единице. Пусть амплитуда опорного напряжения равна величине этого сигнала, т.е. единице. Также пусть амплитуда фазных синусоидальных модулирующих напряжений, равная величине входного управляющего сигнала, меняется от нуля до величины (в относительных единицах), большей единицы (например, до 1.3), а их частота, пропорционально амплитуде, будет меняться от заданного минимального до заданного максимального значений. Как известно, отношение амплитуд модулирующего и опорного напряжений называется глубиной модуляции, и выражение для нее имеет вид
М=ЕМ/Eоп,
где Ем - амплитуда модулирующих напряжений;
Еоп - амплитуда опорного напряжения.
Также известно, что 1-я гармоника выходного напряжения автономного инвертора, управляемого методом ШИМ, пропорциональна глубине модуляции, когда значение последней меньше либо равно единице.
Поскольку Eоп=1, то Ем=М. Сигнал с потенциометра, равный, согласно допущению, также М, в компараторе 8 сравнивается с единичным уровнем напряжения, поступающим с блока 2 делителя напряжения. При условии М>1 на выходе компаратора 8 формируется единичный дискретный сигнал, далее поступающий на второй вход каналов 11-13 сравнения и, соответственно, разделяющий работу устройства на режим при «М<1» и режим при «М>1». В сумматоре 6, на вход которого подаются единичный сигнал и сигнал текущей глубины модуляции М, формируется разностный сигнал
ΔM=M-1,
необходимый в режиме «М>1». Эта разность усиливается блоком 9 усиления в К раз (обоснование величины коэффициента К приведено ниже). Усиленный разностный сигнал
ΔM·K
далее вычитается в сумматоре 10 из единичного уровня и затем делится на величину глубины модуляции в блоке 10 деления, сигнал с выхода которого
(1-ΔM·K)/М
поступает на третий вход каналов 11-13 сравнения, в которых происходит следующее. Соответствующее фазное модулирующее напряжение с четвертого входа сравнивается с нулем в компараторе 15, на выходе которого формируется единичный прямоугольный биполярный сигнал sq(ωf) той же частоты и фазы, что и входное модулирующее напряжение. Далее сформированный сигнал в блоке 17 умножения умножается на усиленный разностный сигнал, поступающий с пятого входа. Тем самым формируется прямоугольная составляющая модулирующего напряжения для зоны перемодуляции.

где sq(ωt) - условное обозначение биполярного меандра единичной амплитуды
как временной функции;
ω - круговая частота синусоидального модулирующего напряжения.
Фазное модулирующее напряжение с четвертого входа также в блоке 14 умножения умножается на сигнал, поступающий с третьего входа. Тем самым формируется синусоидальная составляющая модулирующего напряжения для зоны перемодуляции
uM_sin=eм(t)[1-ΔM·K]/M=Msin(ωt)[1-ΔMK]/М=[1-ΔMK]sin(ωt)
Затем сформированные две составляющие суммируются в сумматоре 16, формируя тем самым модулирующее напряжение для зоны перемодуляции

Далее оно подается на второй вход мультиплексора 18, управляемого сигналом со второго вход соответствующего канала сравнения. При нулевом уровне последнего на выход мультиплексора проходит синусоидальное модулирующее напряжение, а при единичном уровне - суммарное модулирующее напряжение, сформированное для зоны перемодуляции. Тот или иной сигнал с мультиплексора подается на первый вход компаратора 19, где сравнивается с опорным напряжением, поступающим с первого входа канала сравнения. В результате на прямом и инверсном выходах компаратора 19 появляются две противофазные последовательности импульсов, длительность которых меняется по закону соответствующего модулирующего напряжения. Сформированные последовательности импульсов далее поступают на управляющие вход 1-го и 2-го ключа соответствующего полумоста автономного инвертора.
Регулирование скорости асинхронного двигателя осуществляют путем изменения частоты его питающих напряжений с одновременным пропорциональным изменением их амплитудных значений. Формирование напряжений осуществляют инвертором (фиг.2) за счет коммутации силовых ключей 20-25, порядок работы которых определяет направление тока в обмотках двигателя, а рассогласование времен включения между верхним и нижним ключом фазы инвертора величину среднего напряжения фазы на периоде опорного напряжения. Для формирования синусоидальных токов в фазах двигателя используют широтно-импульсная модуляция напряжений по заданному, например синусоидальному, закону. Расширение линейного диапазона регулирования амплитуды 1-й гармоники выходного напряжения автономного инвертора вплоть до режима 180-градусного управления обеспечивает более эффективное использование управляемого им асинхронного двигателя.
В обоснование предложенного способа управления и описанного выше устройства (см. фиг.1) приведем математические выкладки.
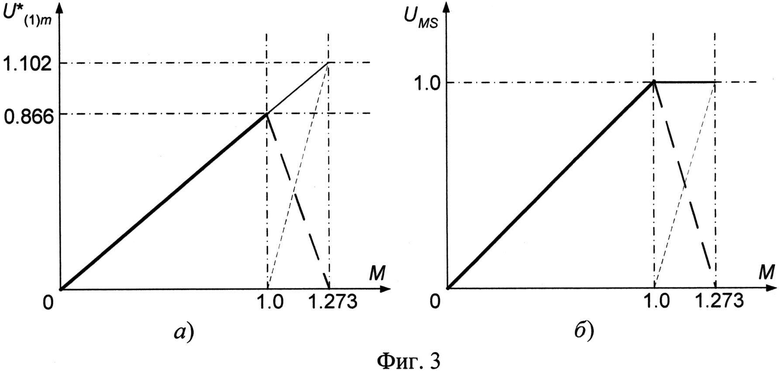
Зависимость амплитуды 1-й гармоники линейного напряжения U(1)m автономного инвертора от глубины модуляции М называется регулировочной характеристикой (РХ). На фиг.3а она изображена в относительных единицах (символ звездочка) для 3-фазного АИН с СШИМ. Базовая величина - напряжение источника питания. Аналитически в этом случае РХ описывается соотношением

Данное выражение справедливо для М<1 (на фиг.3,а этот диапазон выделен утолщенной линией). Далее начинается диапазон перемодуляции (ПМ), для которого характерен резко нелинейный характер РХ (не показан).
Таким образом, максимальное значение 1-й гармоники в линейном диапазоне соответствует величине √3/2=0.866. В то же время максимально возможное значение амплитуды 1-й гармоники, которое имеет место в режиме 180-градусного управления, для 3-фазного инвертора равно 2√3/π=1.102. Задача способа управления состоит в том, чтобы «продолжить» данную РХ линейно до точки, соответствующей 180-градусного управления (см. тонкую сплошную линию на фиг.3а). Исходя из соотношений пропорции, можно показать, что в этом случае указанная точка будет достигнута при глубине модуляции М=4/π=1.273.
180-градусное управление для любого способа ШИМ теоретически является пределом при М→∞. Реально это происходит гораздо раньше при М=5-10 в зависимости от способа управления и кратности частот опорного и модулирующего напряжений. Еще раньше, при М=1, это происходит при широтно-импульсном регулировании (ШИР), когда форма модулирующих напряжений представляет собой биполярный прямоугольный импульс. Тогда при М=1 (амплитуды модулирующего и опорного напряжений равны) все импульсы управления сливаются в один (на полупериоде модулирующего напряжения) 180-градусный импульс и на выходе автономного инвертора имеет место максимальный уровень 1-й гармоники напряжения. Режим ШИР тоже обеспечивает практически линейную РХ, но он характеризуется, как было сказано выше при описании способа-аналога, неудовлетворительным качеством выходного напряжения во всем диапазоне регулирования.
Другими словами, в точке М=1.273 модулирующее напряжение должно иметь прямоугольную форму единичной амплитуды. Идея предложенного способа управления заключается во введении в диапазоне перемодуляции (ПМ), т.е. при М>1, в исходное, например синусоидальное, модулирующее напряжение прямоугольного биполярного компонента той же частоты и фазы с регулируемой амплитудой. Очевидно, что она должна зависеть в этом диапазоне от разности ΔМ - превышении текущей глубины модуляции над единицей
ΔM=М-1
Пусть амплитуда прямоугольного компонента (ПрК) меняется линейно от ДМ. Тогда коэффициент пропорциональности К для него будет равен

Для мгновенного значения ПрК можно записать выражение

где sq(ωt) - условное обозначение биполярного меандра единичной амплитуды как временной функции;
ω - круговая частота синусоидального модулирующего напряжения.
Очевидно, что на интервале ПМ (М=1…1.273) в модулирующем напряжении синусоидальный компонент должен оставаться, но его амплитуда должна меняться противоположным образом, а именно должна быть равна единице при М=1 и нулю при М=1.273. Пусть она меняется в обратной, по отношению к амплитуде ПрК, пропорции. Т.е. для синусоидального компонента модулирующего напряжения коэффициент пропорциональности должен быть равен «-К». Тогда выражение для мгновенного значения синусоидального компонента будет иметь вид

Следует отметить, что хотя, с точки зрения управления автономным инвертором, глубина модуляции больше единицы, амплитуда синусоидального компонента на интервале ПМ, выраженная соотношением (5), будет меньше единицы, следовательно, между ней и соответствующей ей составляющей амплитуды 1-й гармоники линейного напряжения автономного инвертора будет сохраняться линейная зависимость.
Для составляющей амплитуды 1-й гармоники выходного напряжения, определяемой ПрК, по той же причине (см. (4)), зависимость от его амплитуды тоже будет линейной. Таким образом, в предложенном способе управления на интервале ПМ имеют место два компонента модулирующего напряжения, каждому из которых будет линейно соответствовать своя составляющая амплитуды 1-й гармоники выходного напряжения. Выражение для мгновенных значений результирующего (суммарного) модулирующего напряжения можно записать:

Выражение (6) соответствует выражению (1), полученному на основании топологии рассмотренного выше устройства (см. фиг.1).
Коэффициенты при знакопеременных функциях в соотношении (6) есть соответствующие амплитуды. Если их просуммировать, то нетрудно видеть, что амплитуда суммарного модулирующего напряжения на интервале ПМ будет равна единице, т.е. амплитуде опорного сигнала.
Докажем, что при таком результирующем модулирующем напряжении результирующая РХ на интервале ПМ будет линейной и соответствовать выражению (2). Соотношения для составляющих амплитуды 1-й гармоники линейного напряжения от соответствующих компонентов модулирующего напряжения для трехфазного инвертора имеют вид:

Тогда выражение для суммарной амплитуды 1-й гармоники линейного напряжения автономного инвертора будет иметь вид:

С учетом (3) упрощаем уравнение (8), раскрываем разность AM и получаем окончательно:

Что и требовалось доказать.
Изменение амплитуд составляющих 1-й гармоники линейного напряжения от прямоугольного и синусоидального компонентов модулирующего напряжения и результирующей 1-й гармоники в диапазоне ПМ изображены на фиг. а: утолщенная падающая пунктирная линия - от синусоидального компонента, нарастающая пунктирная линия - от прямоугольного, сплошная тонкая линия - результирующая. На фиг.3б показаны зависимости от глубины модуляции на интервале ПМ амплитуд компонентов и амплитуды результирующего модулирующего напряжения: утолщенная падающая пунктирная линия - синусоидальный компонент, нарастающая пунктирная линия - прямоугольный компонент, сплошная утолщенная линия - амплитуда результирующего модулирующего напряжения.
Таким образом, с использованием предлагаемого способа управления автономным инвертором при увеличении глубины модуляции в диапазоне М=1.0…1.273 происходит плавный переход от СШИМ к ШИР и, в конечном итоге, к 180-градусному режиму. Причем этот переход обеспечивают без фактического режима перемодуляции, т.к. при регулировании амплитуда результирующего модулирующего напряжения никогда не превышает амплитуды опорного напряжения. Это обеспечивает не только линейность РХ, но и тот же коэффициент ее пропорциональности, что и для способа СШИМ.
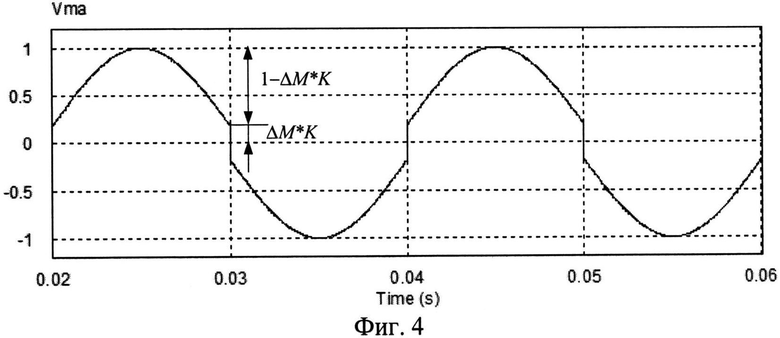
На фиг.4 показана диаграмма результирующего модулирующего напряжения Vma системы управления автономным инвертором при М=1.05 с обозначенными соотношениями для амплитуд его прямоугольного (ΔМ·K) и синусоидального (1-ΔМ·K) компонентов.
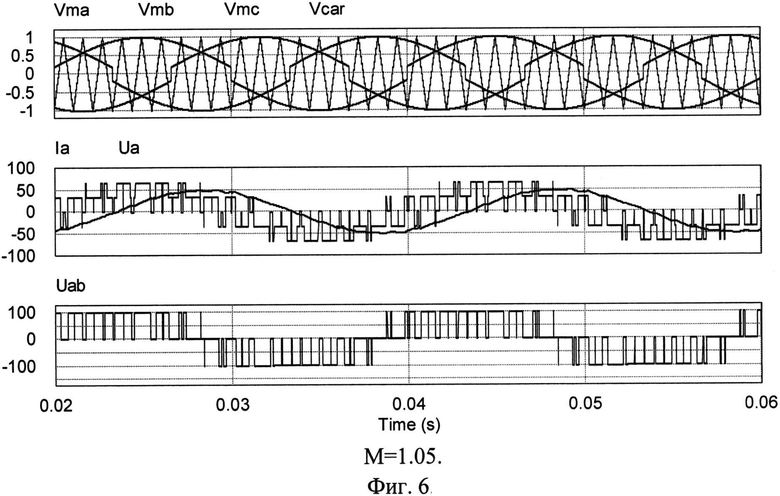
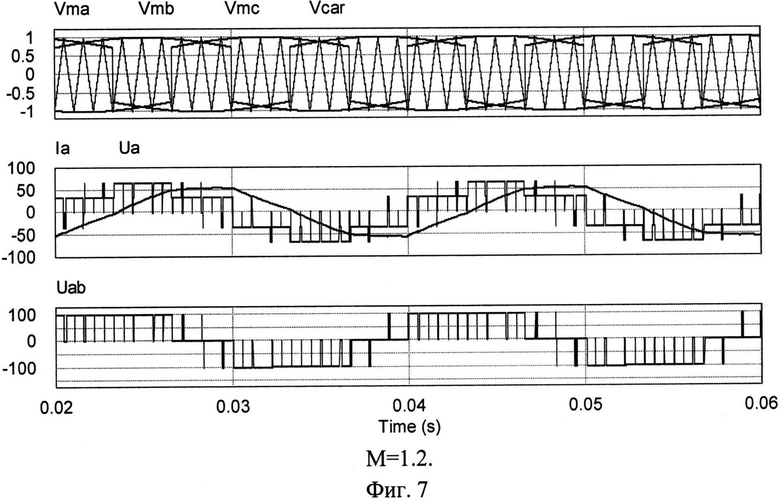
На фиг.5-7 показаны диаграммы сигналов системы управления, а также выходных напряжений и токов автономного инвертора для разных величин глубины модуляции: М=1 (фиг.5), М=1.05 (фиг.6) и М=1.2 (фиг.7). Данные кривые получены в процессе моделирования предлагаемого способа управления в среде моделирования PSIM при работе на трехфазную пассивную RL-нагрузку, а также при отношении частот опорного и модулирующего напряжений, равном 18, частоте выходного напряжения 50 Гц, напряжении источника питания автономного инвертора 100 В.
На диаграммах используют следующие обозначения, обусловленные особенностями синтаксиса использованной программы:
Vma - модулирующее напряжение фазы А;
Vcar - опорное треугольное напряжение;
Ua - напряжение на нагрузке фазы А;
Ia - ток в нагрузке фазы А;
Uab - линейное напряжение автономного инвертора (разность между напряжениями фазы А и фазы В).
Из диаграмм видно, что при глубине модуляции М=1.0 форма тока соответствует синусоиде, а М=1.05 и М=1.2 имеются искажения. Но на работе асинхронного двигателя это скажется мало. При управлении двигателем важным является не столько качество его входного тока, сколько равномерность вращения вала. При использовании предложенного способа управления на низких и средних частотах (М≤1), когда инерционные свойства двигателя малы, равномерность вращения обеспечивают хорошим качеством выходного напряжения (тока) автономного инвертора, а на высоких частотах (М>1) это обеспечивается уже за счет возросших (из-за высокой скорости вращения) инерционных свойств самого двигателя.
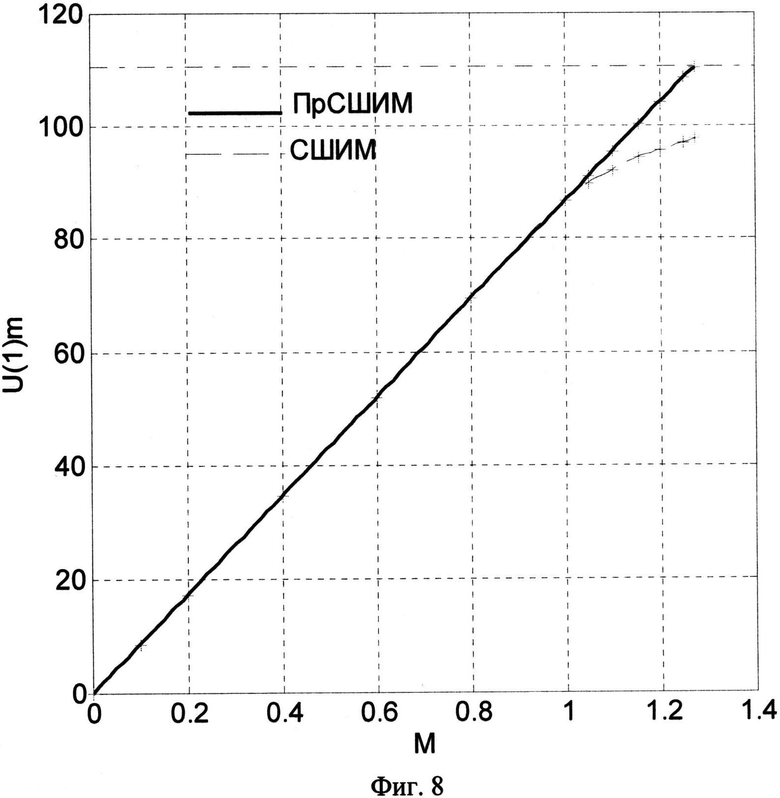
На фиг.8 приведены регулировочные характеристики линейного напряжения трехфазного автономного инвертора, также полученные в результате моделирования в PSIM при описанных выше условиях, для способов управления СШИМ (прототипа) и предложенного способа (ПрСШИМ). Из фиг.8 видно следующее. Во-первых, в зоне ПМ предложенный способ управления, в отличие от способа СШИМ, имеет линейный характер РХ. Во-вторых, предложенный способ управления обеспечивает линейную зависимость между 1-й гармоникой линейного напряжения трехфазного автономного инвертора и глубиной модуляции во всем диапазоне регулирования вплоть до значения 2√3/π=1.102 (на фиг.8 эта величина обозначена горизонтальной штрих-пунктирной линией), которая соответствует 180-градусному управлению, причем с тем же коэффициентом пропорциональности, что и способ СШИМ (прототип).
Таким образом, предложенный способ управления автономным инвертором обеспечивает расширение линейного диапазона регулирования амплитуды 1-й гармоники выходного напряжения автономного инвертора вплоть до максимально возможного значения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ТРЕХФАЗНЫМ АВТОНОМНЫМ ИНВЕРТОРОМ | 2014 |
|
RU2558722C1 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНЫМ ИНВЕРТОРОМ | 2014 |
|
RU2556874C1 |
| Способ управления автономным инвертором напряжения | 2016 |
|
RU2654295C1 |
| Способ управления матричным преобразователем частоты | 2016 |
|
RU2641653C1 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНЫМ ИНВЕРТОРОМ НАПРЯЖЕНИЯ | 2016 |
|
RU2620129C1 |
| Устройство для управления инвертором напряжения | 1984 |
|
SU1319207A1 |
| СПОСОБ ФОРМИРОВАНИЯ ШИРОТНО-ИМПУЛЬСНЫХ СИГНАЛОВ УПРАВЛЕНИЯ АВТОНОМНОГО ИНВЕРТОРА | 2008 |
|
RU2389128C1 |
| СПОСОБ ФОРМИРОВАНИЯ ШИРОТНО-ИМПУЛЬСНЫХ СИГНАЛОВ УПРАВЛЕНИЯ АВТОНОМНОГО ИНВЕРТОРА | 2007 |
|
RU2326486C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ И СПОСОБ УПРАВЛЕНИЯ, ИСПОЛЬЗУЕМЫЕ ПРИ ШУНТИРОВАНИИ БЛОКОВ ПИТАНИЯ | 2012 |
|
RU2518093C1 |
| Способ управления трехфазным мостовым инвертором | 1988 |
|
SU1684891A1 |

Изобретение относится к области преобразовательной техники и предназначено для управления автономными инверторами с широтно-импульсной модуляцией (ШИМ) и может быть использовано для частотного регулирования скорости асинхронного двигателя. Предложенный способ может быть использован для управления как полумостовыми, так и мостовыми инверторами с различным числом фаз, а также инверторами, управляемыми посредством однополярных модулирующих и опорных сигналов. Кроме того, предложенный способ управления может быть использован для управления трехфазными автономными инверторами с введенными в синусоидальный модулирующий сигнал компонентами нулевой последовательности. Предложен способ управления автономным инвертором, основанный на сравнении высокочастотного опорного напряжения треугольной или пилообразной формы и низкочастотного модулирующего напряжения, в котором при амплитуде модулирующего напряжения больше амплитуды опорного напряжения в модулирующее напряжение вводят дополнительный сигнал прямоугольной биполярной формы той же частоты и фазы с амплитудой, пропорциональной разности амплитуд модулирующего и опорного напряжений, причем исходное модулирующее напряжение соответствующим образом ослабляют, так чтобы амплитуда суммарного модулирующего напряжения оставалась равной амплитуде опорного напряжения. Технический результат заключается в расширении линейного диапазона регулирования амплитуды 1-й гармоники выходного напряжения автономного инвертора вплоть до максимально возможного значения. 8 ил.
Способ управления автономным инвертором, основанный на сравнении высокочастотного опорного напряжения треугольной или пилообразной формы и низкочастотного модулирующего напряжения, отличающийся тем, что при амплитуде модулирующего напряжения больше амплитуды опорного напряжения в модулирующее напряжение вводят дополнительный сигнал прямоугольной биполярной формы той же частоты и фазы с амплитудой, пропорциональной разности амплитуд модулирующего и опорного напряжений, причем исходное модулирующее напряжение соответствующим образом ослабляют, так чтобы амплитуда суммарного модулирующего напряжения оставалась равной амплитуде опорного напряжения.
| Способ управления инвертором | 1988 |
|
SU1661936A1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2004 |
|
RU2254666C1 |
| GB1604067A, 02.12.1981 | |||

