Изобретение относится к области преобразовательной техники и предназначено для управления автономными инверторами с широтно-импульсной модуляцией (ШИМ) и может быть использовано для частотного регулирования скорости асинхронного двигателя. Предложенный способ может быть использован для управления как полумостовыми, так и мостовыми инверторами с различным числом фаз, а также инверторами, управляемыми посредством однополярных модулирующих и опорных сигналов. Кроме того, предложенный способ управления может быть использован для управления трехфазными автономными инверторами с введенными в синусоидальный модулирующий сигнал компонентами нулевой последовательности.
Известен способ управления автономным инвертором, заключающийся в сравнении высокочастотного опорного напряжения треугольной или пилообразной формы и низкочастотного модулирующего напряжения прямоугольной формы, результатом которого является формирование серии импульсов одинаковой длительности, величина которой зависит от амплитуды прямоугольного модулирующего напряжения [Руденко B.C., Сенько В.И., Чиженко И.М. Основы преобразовательной техники: Учебник для вузов. - М.: Высш. школа, 1980. - 424 с. (стр.267, рис.4.63)].
Недостатком известного способа управления является низкое качество выходного напряжения, а именно неудовлетворительный спектральный состав напряжения во всем диапазоне его регулирования.
Известен способ управления автономным инвертором (прототип), заключающийся в сравнении высокочастотного опорного напряжения треугольной или пилообразной формы и низкочастотного модулирующего напряжения, например синусоидальной формы, результатом которого является формирование серии импульсов, длительность которых изменяется по закону модулирующего сигнала [Руденко B.C., Сенько В.И., Чиженко И.М. Основы преобразовательной техники: Учебник для вузов. - М.: Высш. школа, 1980. - 424 с. (стр.244, рис.4.45)].
Недостатком этого способа управления является ограниченный диапазон регулирования амплитуды 1-й гармонии выходного напряжения, что приводит к недоиспользованию источника питания и ограничению момента и мощности управляемого инвертором асинхронного двигателя.
Рабочий диапазон регулирования 1-й гармонии имеет место до тех пор, пока амплитуда модулирующего напряжения не превышает амплитуды опорного сигнала. При дальнейшем увеличении модулирующего напряжения (область перемодуляции) амплитуда 1-й гармоники также будет возрастать, но по резко выраженному нелинейному закону, что мало приемлемо для целей управления двигателем. Упомянутая нелинейность в области перемодуляции обусловлена тем, что по мере увеличения амплитуды модулирующего напряжения происходит слияние соседних импульсов управления ключами автономного инвертора и, соответственно, импульсов выходного напряжения инвертора. И на этих участках теряется управляемость - зависимость ширины импульсов от амплитуды модулирующего сигнала. В пределе все импульсы сливаются в один 180-градусный (на полупериоде выходного напряжения) импульс. Данный режим характеризуется отсутствием широтно-импульсной модуляции, но максимально возможной амплитудой 1-й гармоники выходного напряжения автономного инвертора.
Задача заключается в расширении рабочего диапазона регулирования амплитуды 1-й гармоники выходного напряжения автономного инвертора вплоть до режима 180-градусного управления, обеспечивающего ее максимально возможное значение.
Указанная задача достигается тем, что в известном способе управления автономным инвертором, основанном на сравнении высокочастотного опорного напряжения треугольной или пилообразной формы и низкочастотного модулирующего напряжения, предварительно производят модуляцию амплитуды опорного напряжения в соответствии с величиной и формой модулей фазных модулирующих напряжений и далее полученные опорные напряжения сравнивают с соответствующими фазными модулирующими напряжениями.
Сущность изобретения поясняется графическими материалами, где: на фиг.1 - устройство для реализации предложенного способа модуляции, на фиг.2 - схема автономного, например трехфазного, инвертора для реализации способа, на фиг.3 - диаграммы сигналов системы управления и напряжений и тока автономного инвертора, на фиг.4 - выходные характеристики трехфазного автономного инвертора.
Устройство управления трехфазным автономным инвертором (фиг.1) содержит: источник 1 эталонного постоянного напряжения, генератор 2 опорного напряжения, потенциометр 3, трехфазный генератор 4 модулирующего напряжения, сумматор 5, три канала 6-8 сравнения. Каждый канал сравнения в свою очередь содержит формирователь 9 модуля, сумматор 10, блок 11 перемножения, компаратор 12 с прямым и инверсным выходами.
Выход источника 1 эталонного постоянного напряжения подключен к входу генератора 2 опорного напряжения, к первому входу сумматора 5, а также через потенциометр 3 к второму (вычитающему) входу сумматора 5 и к входу трехфазного генератора 4 модулирующего напряжения, три выхода последнего подключены к первым входам (нумерация - снизу) соответствующих каналов 6-8 сравнения, выход сумматора 5 подключен к вторым входам каналов 6-8 сравнения, выход генератора 2 опорного сигнала подключен к третьим входам каналов 6-8 сравнения. Внутри каждого из каналов 6-8 сравнения первый вход подключен к формирователю 9 модуля и к первому входу компаратора 12, второй вход каналов 6-8 сравнения подключен к второму входу сумматора 10, выход которого подключен к одному из входов блока 11 перемножения, третий вход каналов 6-8 сравнения подключен к другому входу блока 11 перемножения, выход которого подключен к второму входу компаратора 12. Прямой и инверсный выходы компараторов 12 далее подключаются соответственно к управляющим входам 1-го и 2-го ключа соответствующего полумоста автономного инвертора.
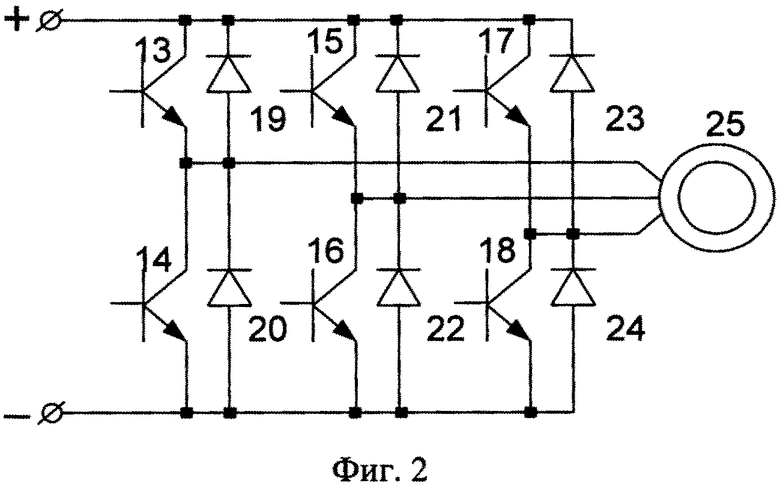
Автономный инвертор (фиг.2) содержит три полумоста полностью управляемых ключей 13-18 и три полумоста неуправляемых обратных вентилей 19-24. Каждый из полумостов фазы инвертора содержит последовательно соединенные первый и второй ключ, подключенных соответственно к положительному и отрицательному выводу источника питания, а средней точкой к соответствующей фазе асинхронного двигателя 25.
Способ управления автономным инвертором осуществляют следующим образом. Регулирование скорости асинхронного двигателя осуществляют путем изменения частоты его питающих напряжений с одновременным пропорциональным изменением их амплитудных значений. Формирование напряжений осуществляют инвертором (фиг.2) за счет коммутации силовых ключей 13-18, порядок работы которых определяет направление тока в обмотках двигателя, а рассогласование времен включения между верхним и нижним ключом фазы инвертора величину среднего напряжения фазы на периоде опорного напряжения. Для формирования синусоидальных токов в фазах двигателя используют широтно-импульсную модуляцию напряжений по заданному, например, синусоидальному закону. Расширение рабочего диапазона регулирования амплитуды 1-й гармоники выходного напряжения автономного инвертора вплоть до режима 180-градусного управления достигают за счет предварительной модуляции амплитуды опорного напряжения в соответствии с величиной и формой модулей фазных модулирующих напряжений и дальнейшего сравнения полученных опорных напряжений с соответствующими фазными модулирующими напряжениями. В результате этого формируют модулированные по длительности импульсы управления ключами автономного инвертора. Вариант устройства управления автономным, например трехфазным, инвертором для реализации предложенного способа при использовании ШИМ, например синусоидальной (далее СШИМ), показан на фиг.1.
Напряжение с источника 1 эталонного постоянного напряжения задает амплитуду треугольного опорного напряжения, а также через потенциометр 3 амплитуду и частоту выходных сигналов трехфазного генератора 4 синусоидального модулирующего напряжения. Примем для простоты величину эталонного напряжения в относительных величинах равной единице. Пусть амплитуда опорного напряжения равна величине эталонного напряжения, т.е. единице. Также пусть амплитуда модулирующих напряжений будет, в соответствии с величиной входного управляющего сигнала, меняться от нуля до единицы, а их частота, пропорционально амплитуде, - от заданного минимального до заданного максимального значений. Напомним, что отношение амплитуды модулирующего сигнала к амплитуде опорного сигнала называется глубиной модуляции, и выражение для нее имеет вид
M=Eм/Eоп,
где Eм - амплитуда модулирующих напряжений;
Еоп - амплитуда опорного напряжения.
Как известно, 1-я гармоника выходного напряжения автономного инвертора пропорциональна глубине модуляции.
Поскольку Еоп=1, то Eм=M. На выходе сумматора 5 будет формироваться разность между амплитудами опорного и модулирующих сигналов. Назовем ее для определенности разностным напряжением. В каналах 6-8 сравнения формирователем 9 формируется модуль соответствующего модулирующего сигнала, к которому в сумматоре 10 добавляется упомянутое разностное напряжение. В результате получается сигнал модуляции опорного напряжения, амплитуда которого всегда равна 1, а огибающая равна абсолютной величине соответствующего фазного модулирующего сигнала. Таким образом, мгновенное значение сигнала модуляции амплитуды опорного сигнала для j-го канала сравнения можно выразить следующим образом:

где φj - фазовый сдвиг модулирующего сигнала j-го канала относительно начала координат;
j - индекс фазы (=A, B, C).
Такая форма опорного треугольного напряжения и ее изменение в зависимости от глубины модуляции, а также число опорных напряжений, равное числу фаз модулирующих напряжений, обеспечивают следующее. Во-первых, при малых значениях глубины модуляции (а значит и на малых выходных частотах автономного инвертора) опорное напряжение мало деформируется, и предложенный способ управления обеспечивает характеристики автономного инвертора, близкие к способу СШИМ, т.е. обеспечивает хорошее качество выходного напряжения.
Во-вторых, при больших значениях глубины модуляции (а, значит, и на высоких выходных частотах автономного инвертора) опорное напряжение деформируется уже существенным образом. Уменьшение амплитуды соответствующего треугольного опорного напряжение по краям соответствующего полупериода модулирующего напряжения приводит, согласно выражению для глубины модуляции (см. выше), к локальному ее увеличению, а значит, и к увеличению амплитуды 1-й гармоники фазного напряжения.
При глубине модуляции М, стремящейся к единице, разностное напряжение стремится к нулю, и сигнал модуляции амплитуды опорного напряжения практически становится равным абсолютному значению соответствующего модулирующего напряжения. При этом импульсы на выходе компаратора перестают модулироваться по синусоидальному закону. Они практически становятся постоянными по длительности, что характерно для способа широтно-импульсного регулирования (ШИР).
Таким образом, с использованием предлагаемого способа управления автономным инвертором при увеличении глубины модуляции происходит плавный переход от СШИМ к ШИР. Последнее в свою очередь обеспечивает плавный переход к режиму 180-градусного управления при M=1. Причем выход на максимально возможный уровень 1-й гармоники обеспечивают без режима перемодуляции, т.к. при регулировании амплитуда модулирующего напряжения никогда не превышает амплитуды опорного напряжения.
Однако плавный переход из режима СШИМ в режим ШИР одновременно приводит к ухудшению качества выходного напряжения. Но на работе асинхронного двигателя это сказывается мало. При управлении двигателем важным является не столько качество его входного тока, сколько равномерность вращения вала. При использовании предложенного способа управления на низких частотах (т.е. на малых глубинах модуляции и при малой деформации опорного напряжения), когда инерционные свойства двигателя малы, равномерность вращения обеспечивают хорошим качеством выходного напряжения (тока) автономного инвертора, а на высоких частотах (т.е. при больших глубинах модуляции и большой деформации опорного напряжения) это обеспечивается уже за счет возросших (из-за высокой скорости вращения) инерционных свойств самого двигателя.
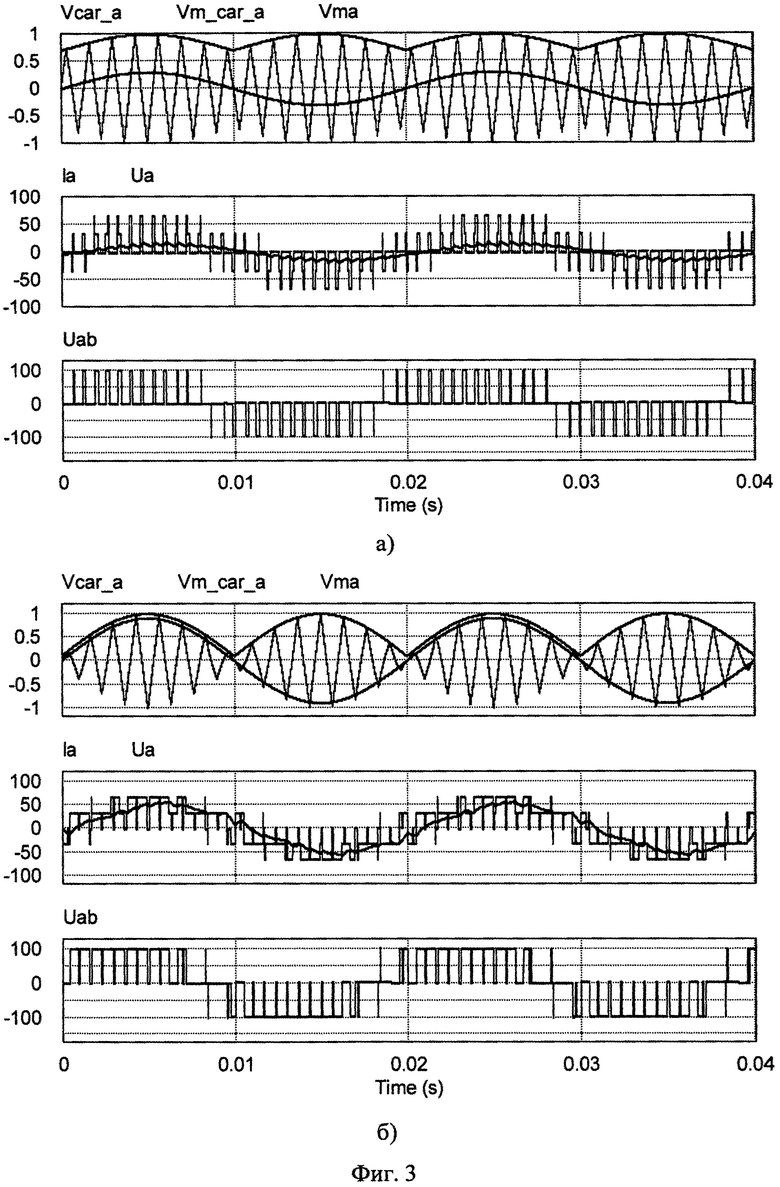
На фиг.3 показаны диаграммы сигналов системы управления, а также выходных напряжений и токов автономного инвертора для разных величин глубины модуляции: M=0.3 (фиг.3а) и M=0.9 (фиг.3б). Данные кривые получены в процессе моделирования предлагаемого способа управления в среде моделирования PSIM, при работе на пассивную RL-нагрузку. На диаграммах используют следующие обозначения, обусловленные особенностями синтаксиса использованной программы:
Vma - синусоидальное модулирующее напряжение фазы A;
Vcar_a - опорное треугольное напряжение фазы A;
Vm_car_a - сигнал модуляции амплитуды опорного напряжения фазы A;
Ua - напряжение на нагрузке фазы A;
Ia - ток в нагрузке фазы А;
Uab - линейное напряжение автономного инвертора (разность между напряжениями фазы A и фазы B).
Из диаграмм видно, что при глубине модуляции M=0.3 форма тока более соответствует синусоиде, чем при M=0.9.
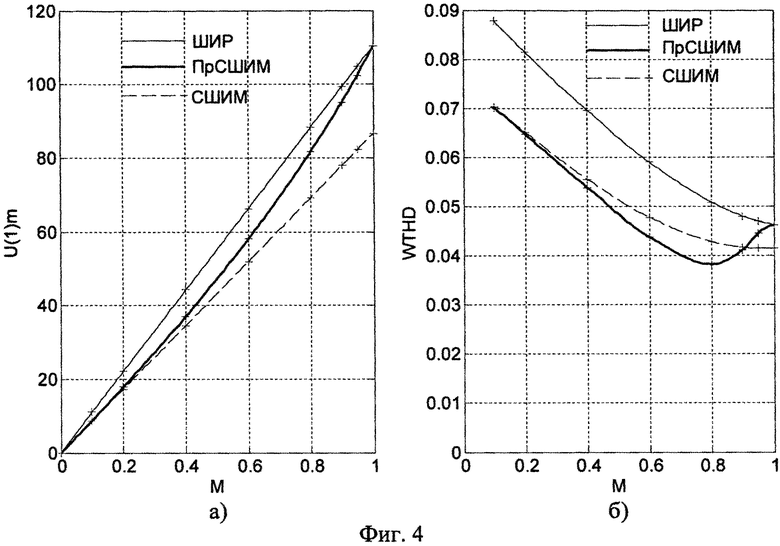
На фиг.4 приведены выходные характеристики трехфазного автономного инвертора напряжения, также снятые в PSIM, для способов управления ШИР, СШИМ и предложенного способа (ПрСШИМ) в зависимости от глубины модуляции М. Кривые сняты при отношении частот опорного и модулирующего напряжений, равном 15, частоте выходного напряжения 50 Гц, напряжении источника питания автономного инвертора 100 В.
На фиг.4а представлены зависимости амплитуды 1-й гармоники линейного напряжения автономного инвертора (U(1)m) от глубины модуляции. Предложенный способ управления обеспечивает прямую зависимость между упомянутыми величинами, с некоторой нелинейностью. Однако пропорциональное регулирование амплитуды и частоты 1-й гармоники выходного напряжения, необходимое для управления асинхронным двигателем, обеспечивается не системой управления автономного инвертора, а внешней системой регулирования электроприводом, формирующей для системы управления инвертором сигналы задания на частоту и глубину модуляции (на фиг.1 эти сигналы формируют с помощью потенциометра 3).
На приведенных графиках для ШИР и ПрСШИМ ординаты при М=1 совпадают и соответствуют режиму 180-градусного управления.
Кроме того, в широком диапазоне изменения глубины модуляции предложенный способ управления обеспечивает и лучшее качество выходного тока по сравнению с СШИМ. На фиг.4б для упомянутых выше способов управления и условий представлены графики зависимости от глубины модуляции взвешенного коэффициента гармоник (WTHD) выходного напряжения. Последний учитывает как амплитуду гармоник, так и их номер в спектре выходного напряжения. Коэффициент определяется следующим образом:
где k - номер гармоники в спектре выходного напряжения,
U(1)m и U(k)m - соответственно амплитуды 1-й и k-й гармоники.
Данный коэффициент по своему значению близок к коэффициенту гармоник тока в RL-нагрузке, поэтому он более информативен, чем обычный коэффициент гармоник. Из приведенных кривых видно, что в диапазоне изменения глубины модуляции 0.3<M<0.9 предложенный способ управления обеспечивает меньшее значение взвешенного коэффициента WTHD (а значит и выходного тока) по сравнению со способом СШИМ. Следовательно, ухудшение качества выходного напряжения автономного инвертора, о котором говорилось выше, при использовании предложенного способа управления имеет место только при M≥0.9.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ТРЕХФАЗНЫМ АВТОНОМНЫМ ИНВЕРТОРОМ | 2014 |
|
RU2558722C1 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНЫМ ИНВЕРТОРОМ | 2014 |
|
RU2564991C1 |
| Способ управления автономным инвертором напряжения | 2016 |
|
RU2654295C1 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНЫМ ИНВЕРТОРОМ НАПРЯЖЕНИЯ | 2016 |
|
RU2620129C1 |
| СПОСОБ ФОРМИРОВАНИЯ ШИРОТНО-ИМПУЛЬСНЫХ СИГНАЛОВ УПРАВЛЕНИЯ АВТОНОМНОГО ИНВЕРТОРА | 2007 |
|
RU2326486C1 |
| СПОСОБ ФОРМИРОВАНИЯ ШИРОТНО-ИМПУЛЬСНЫХ СИГНАЛОВ УПРАВЛЕНИЯ АВТОНОМНОГО ИНВЕРТОРА | 2008 |
|
RU2389128C1 |
| СПОСОБ СНИЖЕНИЯ ВИБРАЦИИ ЭЛЕКТРОДВИГАТЕЛЯ | 2002 |
|
RU2234184C1 |
| СПОСОБ УПРАВЛЕНИЯ МНОГОФАЗНЫМ ВЫПРЯМИТЕЛЬНЫМ АГРЕГАТОМ | 2007 |
|
RU2333589C1 |
| СПОСОБ УПРАВЛЕНИЯ МНОГОФАЗНЫМ ВЫПРЯМИТЕЛЬНЫМ АГРЕГАТОМ | 2009 |
|
RU2402143C1 |
| СПОСОБ УПРАВЛЕНИЯ МНОГОФАЗНОЙ СИСТЕМОЙ ЭЛЕКТРОСНАБЖЕНИЯ ПОТРЕБИТЕЛЕЙ ПОСТОЯННОГО ТОКА | 2009 |
|
RU2410830C1 |
Изобретение относится к области электротехники и может быть использовано для управления автономными инверторами с широтно-импульсной модуляцией (ШИМ) для частотного регулирования скорости асинхронного двигателя. Технический результат заключается в расширении рабочего диапазона регулирования амплитуды 1-й гармоники выходного напряжения автономного инвертора вплоть до режима 180-градусного управления, обеспечивающего ее максимально возможное значение. Способ управления трехфазными автономными инверторами основан на сравнении высокочастотного опорного напряжения треугольной или пилообразной формы и низкочастотного многофазного модулирующего напряжения, в котором предварительно производят модуляцию амплитуды опорного напряжения в соответствии с величиной и формой модулей фазных модулирующих напряжений. Полученные опорные напряжения сравнивают с соответствующими фазными модулирующими напряжениями. 4 ил.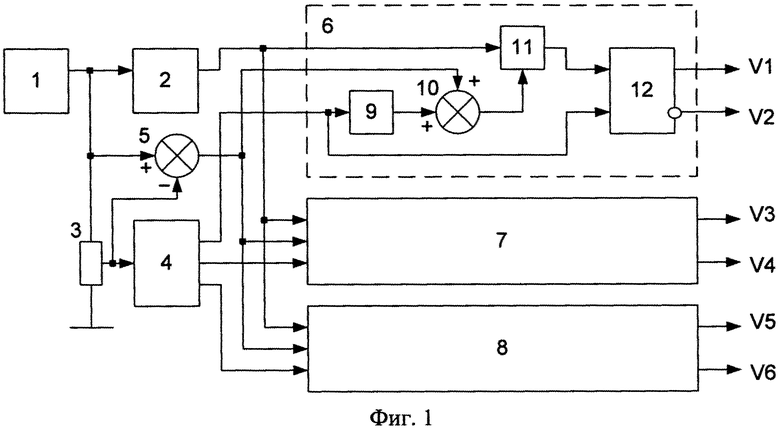
Способ управления автономным инвертором, основанный на сравнении высокочастотного опорного напряжения треугольной или пилообразной формы и низкочастотного модулирующего напряжения, отличающийся тем, что предварительно производят модуляцию амплитуды опорного напряжения в соответствии с величиной и формой модулей фазных модулирующих напряжений и далее полученные опорные напряжения сравнивают с соответствующими фазными модулирующими напряжениями.
| СПОСОБ ФОРМИРОВАНИЯ ШИРОТНО-ИМПУЛЬСНЫХ СИГНАЛОВ УПРАВЛЕНИЯ АВТОНОМНОГО ИНВЕРТОРА | 2008 |
|
RU2389128C1 |
| СПОСОБ ШИРОТНО-ИМПУЛЬСНОГО УПРАВЛЕНИЯ СТАТИЧЕСКИМ ПРЕОБРАЗОВАТЕЛЕМ | 2008 |
|
RU2350007C1 |
| RU 2011147439 Ф, 27.05.2013 | |||
| РУДЕНКО В.С | |||
| и др., Основы преобразовательной техники: Учебник для вузов, Москва, Высшая школа, 1980, с.244, РИС.4.45 | |||
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛЕТОМ ВЫСОКОМАНЕВРЕННОГО САМОЛЕТА | 2008 |
|
RU2373111C1 |
| Способ диагностики Desulfovibrio spp. при нарушениях микробиоценоза желудочно-кишечного тракта | 2023 |
|
RU2821995C1 |
| US 7031172 B2, 18.04.2006 | |||
| СПОСОБ ИЗГОТОВЛЕНИЯ РАЗВЕРТОК СЛОЖНОЙ КОНФИГУРАЦИИ ПО ПЕРИМЕТРУ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1995 |
|
RU2114003C1 |

