Область техники, к которой относится изобретение
Изобретение относится к системе помощи для водителя сельскохозяйственной рабочей машины в соответствии с ограничительной частью пункта 1 формулы изобретения.
Уровень техники
Из патентного документа DE 10147733 известна система помощи водителю, которая является средством поддержки для оператора сельскохозяйственной рабочей машины при оптимизации рабочих параметров рабочих органов. Система помощи водителю содержит помимо сложного устройства отображения вычислительное устройство для обработки различных сигналов от датчиков. Выполненная в виде зерноуборочного комбайна сельскохозяйственная рабочая машина содержит большое число рабочих органов, таких как жатвенный аппарат, молотильное устройство, сепарирующие органы и, по меньшей мере, одно очистное устройство. Эти рабочие органы связаны с множеством датчиков, которые могут детектировать кроме рабочих параметров рабочих органов также и параметры эффективности сельскохозяйственной рабочей машины, такие как зерновые потери, качество зерна и количество возвращаемой массы.
Определяемые датчиками данные подаются на центральное вычислительное устройство, которое из этих сигналов выводит на устройство отображения визуально воспринимаемые данные. Эти визуализированные данные охватывают кроме рабочих параметров сельскохозяйственной рабочей машины, таких как число оборотов молотильного барабана, число оборотов вентилятора очистного устройства, расход убранной массы, ширина ячейки подбарабанья, также параметры эффективности как зерновые потери на очистном и сепарирующем устройствах. Для оптимизации различных рабочих параметров в DE 10147733 предложен способ, согласно которому оператор сельскохозяйственной рабочей машины на первом шаге способа проезжает через подлежащую уборке растительность со скоростью движения, скоординированной с ожидаемым расходом убранной массы, так что комбайн в течение определенного промежутка времени работает с примерно постоянным расходом убранной массы.
Вначале оператор должен подождать, пока комбайн не достигнет так называемого квазиустановившегося состояния, при котором получается примерно постоянный хороший или плохой рабочий результат. Этот рабочий результат регистрируется и отображается для оператора на устройстве отображения. Если рабочий результат неудовлетворителен, вначале оператор комбайна несколько раз изменяет представляющийся ему перспективным рабочий параметр рабочего органа и каждый раз ожидает установившейся фазы комбайна с измененным рабочим параметром. Все процессы получения рабочих результатов регистрируются, так что в заключение оператор может принять решение, при каком конкретном значении рабочего параметра был достигнут наилучший рабочий результат. Далее это конкретное значение устанавливается на соответствующем рабочем органе, что дает улучшенный рабочий результат сельскохозяйственной рабочей машины.
Такой способ имеет прежде всего тот недостаток, что требуется относительно много времени, пока будут отработаны различные рабочие параметры комбайна в оптимальном диапазоне параметров, поскольку для каждого рабочего параметра должна быть выполнена раскрытая в документе установочная процедура. Кроме того, при структурированном таким образом способе настройки быстрая и целенаправленная оптимизация в значительной степени зависит от уровня знаний оператора сельскохозяйственной рабочей машины, так как различные рабочие параметры имеют очень сложные взаимные влияния. К тому же при таком структурировании способа оптимизации почти невозможно обеспечивать выполнение специфических требований к убранной массе, задаваемых заказчиком.
Раскрытие изобретения
Соответственно, задачей изобретения является устранение указанных недостатков известных решений уровня техники и создание системы помощи водителю для оптимизации эффективности сельскохозяйственной рабочей машины, которая в пределах кратчайшего времени обеспечивает оптимизированный и адаптированный к желаниям заказчика рабочий режим сельскохозяйственной рабочей машины.
В соответствии с изобретением решение поставленной задачи достигается за счет отличительных признаков по пунктам 1 и 11 формулы изобретения.
Согласно изобретению выполненная в виде зерноуборочного комбайна сельскохозяйственная рабочая машина оснащена системой помощи водителю, которая содержит выбираемые стратегии управления процессом, причем критерием выбора стратегии управления процессом для определенной цели использования убранной массы является требуемое качество убранной массы и/или критерии оптимизации рабочих органов. Благодаря этому в пределах кратчайшего времени обеспечивается оптимизированный и адаптированный к желаниям заказчика рабочий режим сельскохозяйственной рабочей машины.
В предпочтительном примере осуществления изобретения редактируемый критерий выбора содержит критерии «пищевые культуры», «семенной материал», «кормовые культуры» и/или критерий «технические культуры», так что достигается согласованный с необходимым качеством убранной массы оптимизированный рабочий режим сельскохозяйственной рабочей машины практически для всех целей использования убранной массы.
В предпочтительном решении по развитию изобретения легко преобразуемая математически и обеспечивающая необходимое качество убранной массы стратегия управления процессом достигается, когда каждая из стратегий управления процессом учитывает один или несколько параметров убранной массы «битое зерно», «чистота» и «количество обмолоченного зерна» таким образом, что
- при активизации критерия выбора «пищевые культуры» регулирование направлено на оптимальное сочетание минимального значения параметра «битое зерно», максимального значения параметра «количество обмолоченного зерна» и максимального значения параметра «чистота»,
- при активизации критерия выбора «семенной материал» регулирование направлено на достижение минимального значения параметра «битое зерно», а параметр «чистота» и параметр «количество обмолоченного зерна» имеют второстепенный приоритет,
- при активизации критерия выбора «кормовые культуры» регулирование направлено на достижение максимального значения параметра «количество обмолоченного зерна», а параметр «чистота» и параметр «битое зерно» имеют второстепенный приоритет,
- при активизации критерия выбора «технические культуры» приоритет не отдается ни одному из параметров убранной массы, то есть параметру «битое зерно», параметру «чистота» и параметру «количество обмолоченного зерна».
Особенно гибкая и приспособляемая к специфическим требованиям заказчика система помощи водителю создается в том случае, когда заложенные в характеристических линиях или алгоритмах зависимости параметров убранной массы критерия выбора записаны в устройстве управления и регулирования с возможностью редактирования.
В следующем предпочтительном примере осуществления изобретения каждая стратегия управления процессом может дополнительно или альтернативно содержать критерии оптимизации, в том числе критерий «максимальное качество обмолота» и/или критерий «эффективный расход топлива» и/или критерий «максимальный расход убранной массы» и/или критерий «баланс». За счет этого помимо параметров качества, непосредственно ориентированных на качество убранной массы, учитываются также качественные параметры, относящиеся к рабочему режиму сельскохозяйственной рабочей машины. В результате сельскохозяйственная рабочая машина работает не только с требуемой точностью, но также по возможности с максимальной эффективностью.
Особенно простое и наглядное обращение оператора с системой помощи водителю обеспечивается, когда критерии выбора и/или критерии оптимизации отображаются с возможностью выбора для оператора зерноуборочного комбайна на устройстве отображения, при этом выбор может осуществляться с помощью сенсорного экрана или с помощью кнопок, а определяемая посредством активизированного критерия выбора и/или критерия оптимизации стратегия управления процессом преобразуется в заложенные в устройстве управления и регулирования характеристические кривые или алгоритмы.
В следующем предпочтительном примере осуществления изобретения параметры качества, относящиеся к рабочему режиму сельскохозяйственной рабочей машины, поддаются особенно эффективному влиянию, когда рабочий режим рабочих органов может регулироваться посредством регулирующих автоматов, а регулирующие автоматы охватывают, по меньшей мере, регулятор скорости движения и/или автомат обмолота и/или автомат сепарации и/или автомат очистки.
Для того, чтобы оператор сельскохозяйственной рабочей машины мог более оптимальным образом понимать оптимизацию, которая выполняется системой помощи водителю, в предпочтительном решении по развитию изобретения предусмотрено, что в поле подсказки устройства отображения помещается общая подсказка о том, что воздействие имеется и какие именно воздействия выбранная на основе критерия выбора или критерия оптимизации стратегия управления процессом оказывает на действие регулирующих автоматов и/или параметры убранной массы.
В предпочтительном примере осуществления изобретения особенно гибкая оптимизация сельскохозяйственной рабочей машины достигается благодаря тому, что действие регулирующих автоматов является редактируемым, а редактирование может осуществляться на основе диалога через посредство устройства отображения, при этом один или несколько регулирующих автоматов могут быть включены или выключены или отредактированы оператором или автоматически устройством управления и регулирования.
В следующем предпочтительном примере осуществления изобретения особенно эффективная поддержка оптимизации сельскохозяйственной рабочей машины достигается за счет того, что в устройстве управления и регулирования вырабатываются оптимизированные предложения по настройке одного или нескольких регулирующих автоматов и отображаются для оператора на диалоговом поле устройства отображения.
Предусмотренный изобретением способ эксплуатации сельскохозяйственной рабочей машины, оснащенной системой помощи водителю по изобретению содержит следующие шаги:
a) на первом шаге меню оператору сельскохозяйственной рабочей машины предлагают сделать выбор стратегии управления процессом, причем стратегия управления процессом альтернативно или одновременно предусматривает активизацию критерия выбора, определяющего качество убранной массы, и/или критерия оптимизации, определяющего рабочий режим рабочих органов,
b) в зависимости от выбранной стратегии управления процессом на следующем шаге меню оператору предлагают выбрать критерий выбора и/или активизировать регулирующий автомат и относящийся к нему критерий оптимизации,
с) в зависимости от активизированной оператором сельскохозяйственной рабочей машины стратегии управления процессом с помощью системы помощи водителю определяют оптимизированные рабочие параметры, по меньшей мере, для одного рабочего органа и осуществляют настройку оптимизированного рабочего параметра, по меньшей мере, на одном рабочем органе.
Благодаря этому оператор сельскохозяйственной рабочей машины может в пределах кратчайшего времени обеспечить оптимизированный и адаптированный к желаниям заказчика рабочий режим сельскохозяйственной рабочей машины.
Дальнейшие предпочтительные примеры осуществления и дополнительные решения по развитию изобретения являются предметом защиты в зависимых пунктах.
Краткий перечень чертежей
Далее со ссылками на прилагаемые чертежи будут подробно описаны примеры осуществления изобретения. На чертежах:
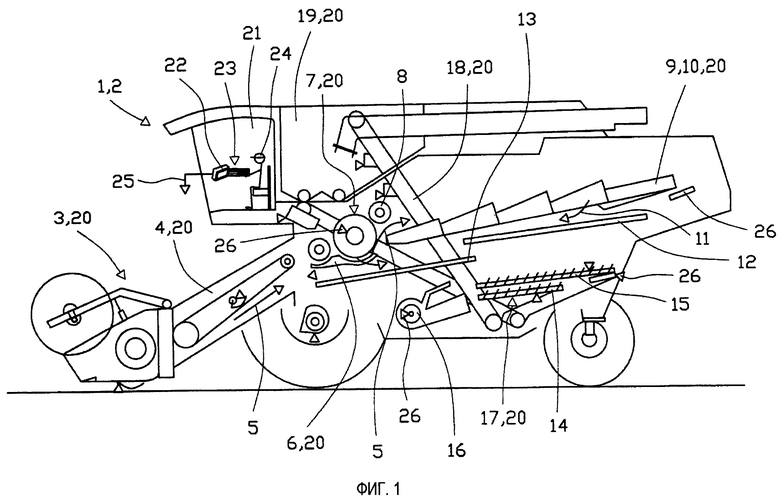
фиг.1 изображает выполненную в виде зерноуборочного комбайна, сельскохозяйственную рабочую машину, оснащенную системой помощи водителю в соответствии с изобретением,
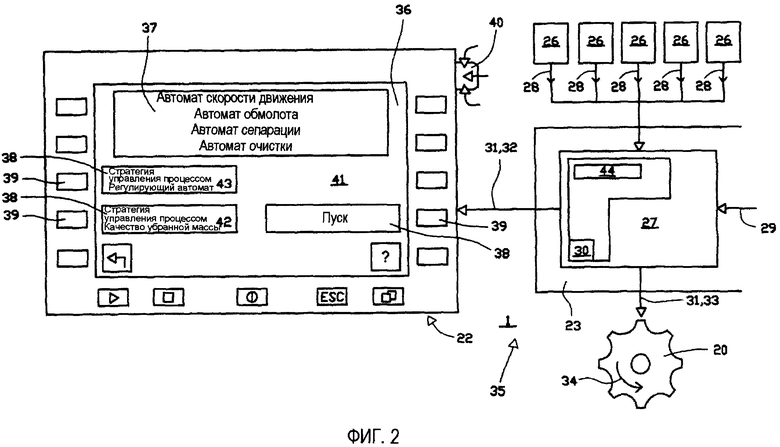
фиг.2 изображает блок-схему системы помощи водителю,
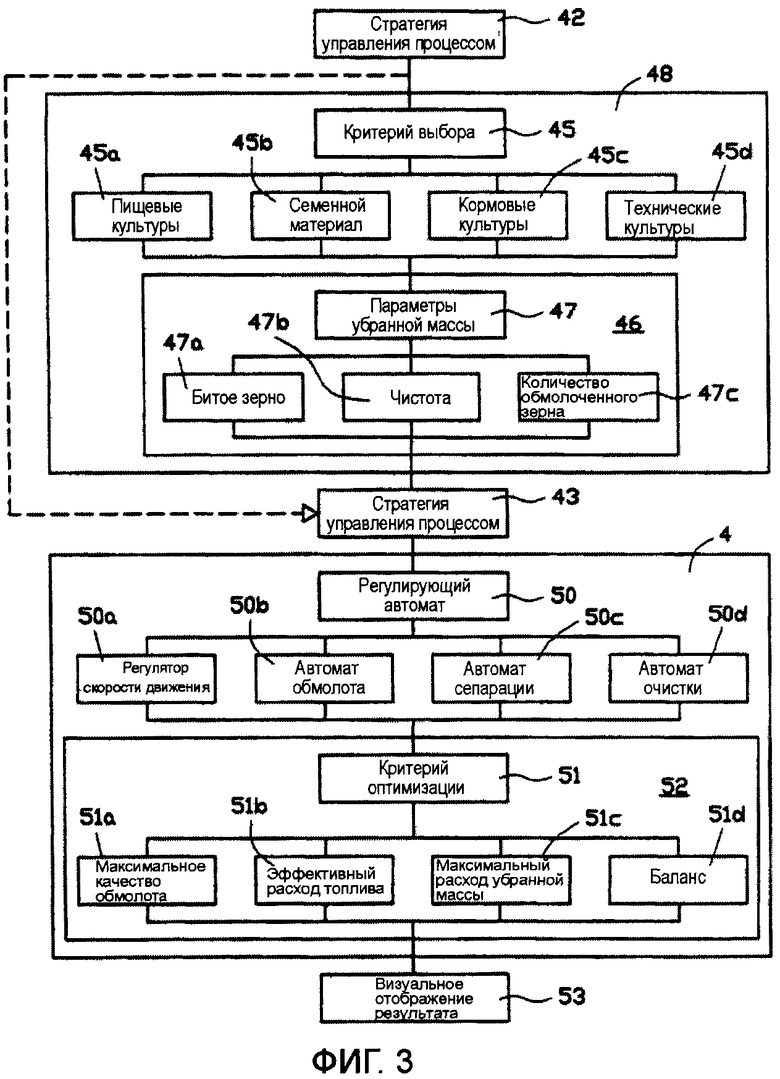
фиг.3 изображает блок-схему способа действия системы помощи водителю по изобретению,
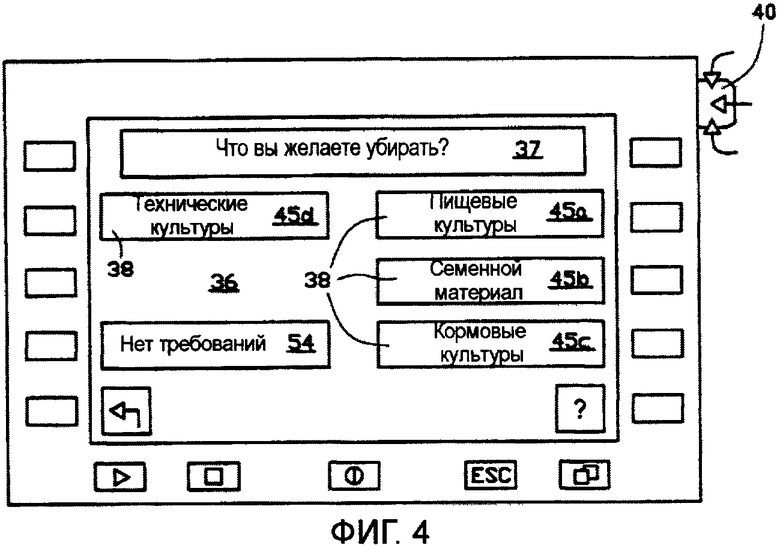
фиг.4 изображает структуру устройства отображения для определения критериев выбора первой стратегии управления процессом,
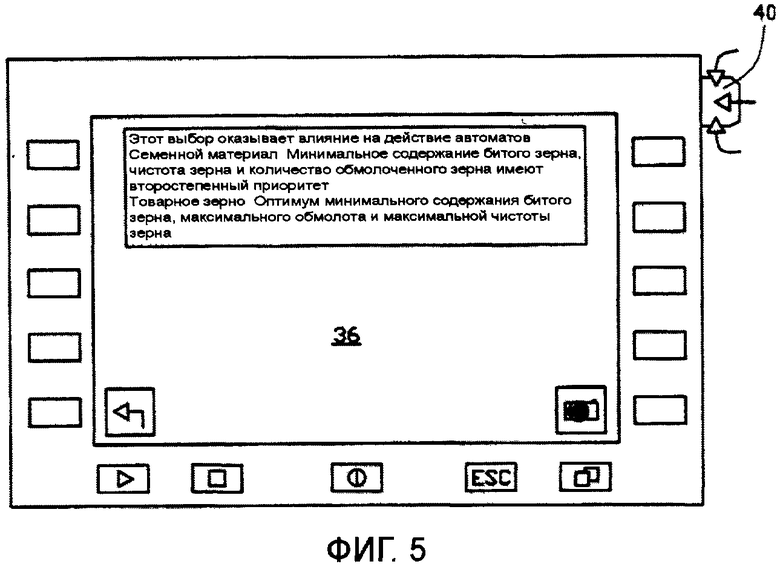
фиг.5 изображает структуру устройства отображения с активизированными полями подсказки в первой стратегии управления процессом,
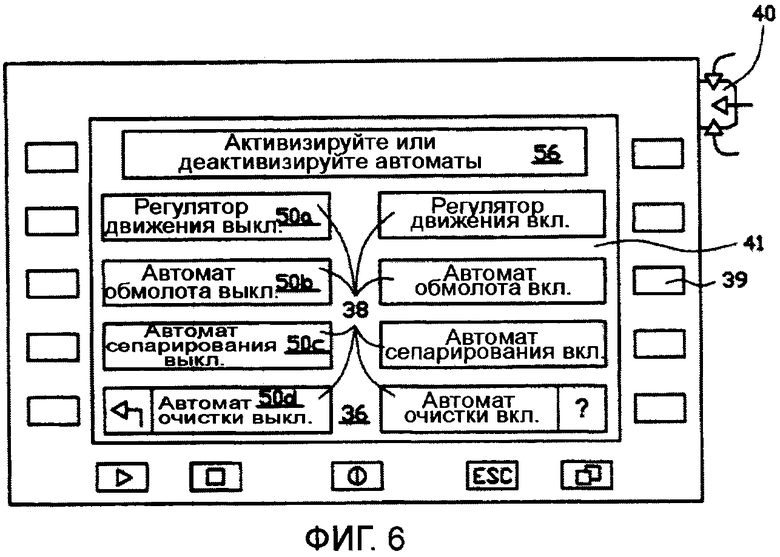
фиг.6 изображает структуру устройства отображения для определения регулирующих автоматов дополнительной стратегии управления процессом,
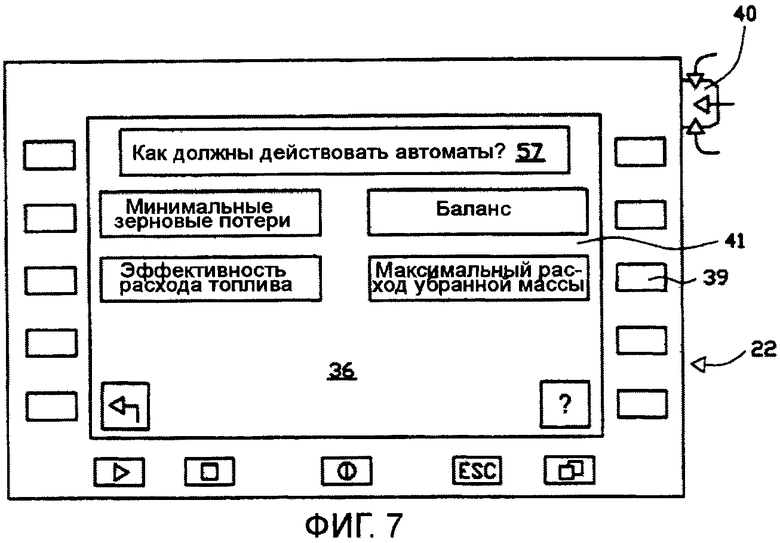
фиг.7 изображает структуру устройства отображения для определения критериев оптимизации регулирующих автоматов дополнительной стратегии управления процессом.
Осуществление изобретения
На фиг.1 схематично показана сельскохозяйственная рабочая машина 1, выполненная в виде зерноуборочного комбайна 2. В передней области комбайн 2 оснащен жатвенным аппаратом 3, который известным образом соединен с наклонным питателем 4 комбайна. Проходящий через наклонный питатель 4 поток 5 убранной массы в верхней задней области питателя передается на молотильные органы 7, которые, по меньшей мере, частично охватываются снизу подбарабаньем 6. Расположенный за молотильными органами 7 отбойный барабан 8 отклоняет выходящий из них поток 5 убранной массы, так что он непосредственно передается на сепарирующее устройство 10, которое в данной примере осуществления выполнено в виде клавишного соломотряса 9. В рамках изобретения комбайн 2 вместо клавишного соломотряса 9 может быть оснащен сепарирующим устройством 10 в виде известного и поэтому не показанного сепарирующего ротора. На совершающем круговые движения клавишном соломотрясе 9 поток 5 убранной массы транспортируется таким образом, что содержащиеся в нем свободные зерна 11 отделяются в нижней области клавишного соломотряса 9. Отделенные как на подбарабанье 6, так и на клавишном соломотрясе 9 зерна 11 направляются по обратному поддону 12 и подающему поддону 13 в очистное устройство 17, которое состоит из нескольких решетных плоскостей 14, 15 и вентилятора 16. Далее очищенный зерновой поток передается с помощью элеваторов 18 в зерновой бункер 19. В дальнейшем жатвенный аппарат 3, наклонный питатель 4, молотильные органы 7 с относящимся к ним подбарабаньем 6, сепарирующее устройство 10, очистное устройство 17, элеваторы 18 и зерновой бункер 19 будут называться рабочими органами сельскохозяйственной рабочей машины 1.
Далее, сельскохозяйственная рабочая машина 1 имеет кабину 21 водителя, в которой расположено, по меньшей мере, одно снабженное устройством 22 отображения устройство 23 управления и регулирования, с помощью которого автоматически или по инициативе оператора 24 сельскохозяйственной рабочей машины 1 может выполняться управление множеством процессов, которые будут подробно описаны ниже. Устройство 23 управления и регулирования известным образом связано посредством так называемой шины 25 с множеством систем 26 датчиков. Структура системы 26 датчиков подробно описана в патентном документе DE 10147733, содержание которого полностью включено в описание к настоящей заявке в качестве ссылки, так что в дальнейшем структура системы 26 датчиков подробно не описывается.
Фиг.2 изображает блок-схему устройства 22 отображения устройства 23 управления и регулирования и вычислительного устройства 27, которое предназначено для устройства 23 управления и регулирования и связано с устройством 22 отображения. Вычислительное устройство 27 выполнено таким образом, что может обрабатывать кроме данных 28, генерируемых системами 26 датчиков, также внешние данные 29 и записанные в самом вычислительном устройстве данные 30, такие как экспертные знания, и генерировать выходные сигналы 31. При этом выходные сигналы 31 генерируются таким образом, что содержат, по меньшей мере, управляющие сигналы 32 отображения и сигналы 33 управления рабочими органами. Первые из них определяют содержание отображения на устройстве 22 отображения, а последние вызывают изменение самых различных рабочих параметров 34 рабочих органов 20 сельскохозяйственной рабочей машины 1, причем стрелкой 34 символично обозначен параметр числа оборотов молотильного барабана. Устройство 23 управления и регулирования с предназначенным для него устройством 22 отображения и вычислительное устройство 27 являются компонентами системы 35 помощи водителю, устройство 22 отображения которого в области 36 отображения обеспечивает возможность интерактивной связи на обычном языке между оператором 24 и системой 35 помощи водителю.
Область 36 отображения устройства 22 отображения содержит помимо одного или нескольких полей 37 подсказки поля 38 выбора для активизации различных процессов, которые будут подробно описаны дальше. Активизация конкретного поля 38 выбора осуществляется либо непосредственно с помощью предназначенной для каждого поля 38 выбора кнопки 39 и/или с помощью центральной навигационной кнопки 40, которая путем поворота и нажима позволяет маневрировать между различными полями 38 выбора, и/или непосредственным касанием соответствующего поля 38 выбора оператором 24 при выполнении области 36 отображения в виде сенсорного монитора 41.
Фиг.2 показывает также пусковую структуру области 36 отображения. При этом поле выбора «стратегия 42 управления процессом - качество убранной массы» обеспечивает возможность выбора описываемых в дальнейшем стратегий ведения процессов в соответствии с изобретением, активизации поля выбора «стратегия 43 управления процессом - регулирующий автомат» обеспечивает возможность редактирования регулирующих автоматов в соответствии с изобретением, как это будет подробно описано дальше, а привод в действие кнопки выбора «Пуск» вызывает активизацию системы 35 помощи водителю. В представленном примере осуществления в поле 37 подсказки визуально отображаются данные для активизации описываемых в дальнейшем регулирующих автоматов и выбираемых стратегий 42, 43, с направленными оператору вопросами о том, что он желает сделать. После активизации поля 38 выбора в вычислительном устройстве 27 устройства 23 управления и регулирования активизируется записанный в нем программный модуль 44, который по активизированной стратегии 42, 43 управления процессом обеспечивает оптимизацию рабочих параметров 34 рабочих органов 20 с привлечением записанных в вычислительном устройстве данных 30, а также имеющихся в распоряжении внешних и внутренних данных 28, 29.
На фиг.3 на блок-схеме процесса показан ход способа по изобретению для выбора, редактирования и активизации одной из записанных в вычислительном устройстве 27 стратегий 42, 43 управления процессом, причем каждая из стратегий 42, 43 управления процессом может быть альтернативно или совместно с другими привлечена для оптимизации рабочих параметров 34 рабочих органов 20 сельскохозяйственной рабочей машины 1.
Если активизирована стратегия 42 управления процессом «Качество убранной массы», при данных условиях обеспечивается эффективный рабочий режим сельскохозяйственной рабочей машины 1 с необходимой точностью. Для этого оператор сельскохозяйственной рабочей машины 1 должен выбрать критерий 45a-45d выбора из множества предварительно определенных критериев 45 выбора. В зависимости от цели использования и связанного с ней требуемого качества подлежащей уборке культуры в системе 35 помощи водителю записаны стратегии 42 управления процессом для уборки пищевых культур (критерий 45а выбора), семенного материала (критерий 45b выбора), кормовых культур (критерий 45 с выбора) и технических культур (критерий 45а выбора). При программной обработке эти стратегии 42 управления процессом преобразуются в характеристические кривые или алгоритмы 46, которые в зависимости от соответствующего критерия 45a-45d выбора увязывают между собой различные параметры 47 убираемой массы. Затем подлежащие определению математические зависимости в характеристических кривых 46 могут быть относительно легко структурированы, когда подлежащие учету параметры 47 убираемой массы ограничены до одного или нескольких параметров: битое зерно - параметр 47а, чистота - параметр 47b и количество обмолоченного зерна - параметр 47с. При этом общие зависимости различных параметров 47а-47с в зависимости от выбранного критерия 45 выбора определяются следующим образом.
При активизации критерия 45а выбора «пищевые культуры» устанавливается оптимальный порядок регулирования; минимум значения для параметра 47а битого зерна, максимум значения для параметра 47с количества обмолоченного зерна и максимум значения для параметра 47b чистоты. Если активизируется критерий 45b выбора «семенной материал», регулирование выдвигает на первое место минимум по критерию 47а битого зерна, а параметр 47b чистоты и параметр 47с количества обмолоченного зерна имеют второстепенный приоритет. При активизации критерия 45 с выбора «кормовые культуры» стратегия 42 управления процессом выдвигает на первое место параметр 47с количества обмолоченного зерна, а параметр 47b чистоты и параметр 47а битого зерна имеют второстепенный приоритет. Если в отличие от этого активизируется критерий 45d выбора «технические культуры», ни одному из параметров 47а-47с не отдается приоритет. Здесь задачей является оптимальное сочетание параметров 47 убираемой массы.
Таким образом, при подлежащей выполнению оператором 24 активизации соответствующего критерия 45 выбора, как это было описано выше, проводится первая ступень 48 оптимизации в соответствии со стратегией 42 управления процессом, которая приводит к рабочему режиму выполненной в виде зерноуборочного комбайна 2 сельскохозяйственной рабочей машины 1, адаптированному к необходимому качеству убранной массы.
В рамках изобретения предусмотрено, что зависимости различных параметров 47 убираемой массы либо предварительно определены в виде характеристических кривых или алгоритмов 46, либо записаны в устройстве 23 управления и регулирования с возможностью редактирования. В последнем случае возможна также модификация записанных характеристических кривых 46 с помощью консультанта в соответствии со специфическими условиями данной сельскохозяйственной эксплуатации. При этом в качестве консультанта может выступать сам фермер, лучше всех знающий свои пахотные площади и специфические условия хозяйства, внешние эксперты или поставщик сельскохозяйственной рабочей машины 1.
Для дальнейшего повышения эффективности сельскохозяйственной рабочей машины 1 альтернативно или дополнительно может быть предусмотрена дальнейшая стратегия 43 управления процессом, представляющая следующую ступень 49 оптимизации, на которой оптимизируют режим действия регулирующих автоматов 50, как это будет подробно описано дальше. Регулирующие автоматы 50 относятся к функциональной области сельскохозяйственной рабочей машины 1 и в представленном примере осуществления охватывают регулятор 50а скорости движения и/или автомат 50b обмолота и/или автомат 50с сепарирования и/или автомат 50d очистки. В рамках изобретения могут быть предусмотрены и другие автоматы, такие как так называемый автомат сменного рабочего органа или автомат соломорезки. В этом случае они также могут не показанным образом быть выбраны и отредактированы с помощью дальнейшей стратегии 43 управления процессом. Способ действия каждого из регулирующих автоматов 50 может быть оптимизирован с помощью критериев 51 оптимизации, которые направлены на рабочий режим самой сельскохозяйственной рабочей машины 1 и на параметры 47 убираемой массы. В представленном примере осуществления критерии 51 оптимизации охватывают параметр 51а «максимальное качество обмолота», параметр 51b «работа сельскохозяйственной рабочей машины с эффективным расходом топлива», параметр 51с «максимальный расход убранной массы» и параметр 51d «баланс», причем параметр 51d «баланс» представляет оптимум остальных параметров 51а-51с. В рамках изобретения возможен вариант, при котором один, несколько или все параметры 51a-51d учитываются одновременно в стратегии 42 управления процессом.
Известные сами по себе и поэтому здесь не описываемые математические зависимости различных критериев 51 оптимизации в отношении соответствующих активизируемых регулирующих автоматов 50a-50d по аналогии с активизацией характеристических кривых или алгоритмов 52 записаны в вычислительном устройстве 27 устройства 23 управления и регулирования и могут быть описаны в общем виде следующим образом.
Если, например, активизируется критерий 51а оптимизации «максимальное качество обмолота», регулятор 50а скорости движения управляет скоростью движения сельскохозяйственной рабочей машины 1, а следовательно и расходом убранной массы в зависимости от зерновых потерь. При этом критерии 51а оптимизации автомат 50b обмолота регулирует параметры молотильных органов 7, такие как расстояние между подбарабаньем 6 и молотильными органами 7 и число оборотов молотильных органов 7, таким образом, что достигается интенсивный обмолот и низкое содержание битого зерна. При этом же критерии 51а оптимизации автомат 50с сепарирования обеспечивает низкое повреждение соломы в потоке 5 убранной массы в области сепарирующего устройства 10, предпочтительно при использовании вращающихся сепарирующих устройств, так что в области сепарирующего устройства 10 отсеиваются преимущественно зерна 11 с небольшим количеством соломы. И наконец, при выборе критерия 51а оптимизации «максимальное качество обмолота» автомат 50d обеспечивает высокое качество зерна и не допускает подачи в зерновой бункер необмолоченных колосьев культуры.
Когда активизируется критерий 51b оптимизации «эффективность расхода топлива», по сравнению с описанным выше критерием 51а автомат 50b обмолота отменяет критерий качества обмолота в пользу более низкого потребления топлива, однако обеспечивает низкое содержание битого зерна. Автомат 50с сепарации при активизации критерия 51b оптимизации действует в основном так же, как и при активизации критерия 51а оптимизации, однако стремится к наиболее низкому потреблению топлива вращающимся сепарирующим устройством 10, то есть устанавливает по возможности низкое число оборотов ротора. Автомат 50d очистки при задании рабочего режима с эффективным расходом топлива обеспечивает оптимум между качеством убранной массы и производительностью очистки, причем этот оптимум в основном зависит от описанного выше критерия 45 выбора. Поскольку рабочий режим с эффективным расходом топлива в основном определяется энергопотреблением рабочих органов, регулятор 50 скорости движения при активизации критерия 51b оптимизации «эффективность расхода топлива» имеет второстепенное значение и регулирует скорость движения в зависимости от потребностей остальных регулирующих автоматов 50b-50d. Однако когда параметры в остальных регулирующих автоматах 50b-50d находятся в оптимальном диапазоне, эффективный по расходу топлива рабочий режим, а именно наибольший возможный расход потока зерна на литр топлива, достигается при эксплуатации сельскохозяйственной рабочей машины с наибольшей возможной скоростью движения.
Когда активизируется критерий 51с оптимизации «максимальный расход убранной массы», все регулирующие автоматы 50 настраиваются на предельную производительность, то есть регулятор 50 скорости движения устанавливает максимально возможную и допустимую скорость движения, автомат 50b обмолота настраивает молотильные органы 7 на максимальную производительность обмолота, автомат 50с сепарирования обеспечивает максимально возможную производительность сепарирования, а автомат 50d очистки регулирует очистное устройство 17 аналогичным образом в диапазоне максимально возможной и допустимой производительности очистки. Вследствие того, что критерий «эффективность энергопотребления» при условии нахождения параметров различных регулирующих автоматов 50 в оптимальном диапазоне может означать также «максимально возможный расход убранной массы», может получаться, что критерии оптимизации 51b ««эффективность расхода топлива» и 51с «максимальный расход убранной массы» могут осуществлять одну и ту же стратегию регулирования.
Когда в отличие от этого активизируется критерий 51d оптимизации «баланс», автомат 50b регулируется таким образом, что, что обеспечивает оптимальный обмолот при низком содержании битого зерна при высоком расходе убранной массы. Автомат 50с сепарирования при активизации критерия 51d оптимизации действует таким образом, что устанавливает оптимум максимального расхода убранной массы при минимальном содержании битого зерна и минимальное измельчение соломы при высоком расходе убранной массы. Автомат 50d очистки регулирует очистное устройство 17 при сбалансированном действии регулирующих автоматов 50 на оптимум чистоты зерна и требуемую производительность очистки. Поскольку сбалансированный рабочий режим сельскохозяйственной рабочей машины 1 в значительной степени определяется принципами действия регулирующих автоматов 50b-50d, регулятор 50а скорости движения при активизированном критерии 51d оптимизации «баланс» имеет второстепенное значение и регулирует скорость движения в зависимости от потребностей остальных регулирующих автоматов 50b-50d.
На последнем шаге 53 способа определяемые параметры визуально отображаются в соответствии с фиг.3, причем вид и способ визуального отображения подробно описывается ниже.
Согласно фиг.2 и относящемуся к ней описанию система 35 помощи водителю запускается путем того, что оператор 24 активизирует одно из полей 38 выбора с помощью кнопок 39 или навигационной кнопки 40 или функции сенсорного экрана.
Когда оператор 24 активизирует поле выбора стратегии 42 управления процессом - «качество убранной массы», в соответствии с фиг.4 в области 36 отображения визуально отображаются критерии 45 выбора, которые могут быть активизированы. В данном примере осуществления это 45а - пищевые культуры, 45b - семенной материал, 45с - кормовые культуры и 45d - технические культуры. В зависимости от желания заказчика оператор определяет выбор одного из критериев 45a-45d выбора путем активизации соответствующего поля 38 выбора. В варианте осуществления оператор может вначале получить в поле 37 подсказки информацию о том, что он должен сделать. Кроме того, может быть предусмотрено дополнительное поле 54 выбора, при активизации которого определение критериев 45a-45d выбора не производится. Это может быть случай, когда либо уже активизирован правильный критерий 45a-45d выбора, либо определения критерия 45a-45d выбора не требуется.
После выбора критерия 45a-45d выбора в предпочтительном примере осуществления по фиг.5 может быть предусмотрено, что открывается следующее окно 55 подсказки, в котором для оператора 24 визуально отображаются зависимости и взаимосвязи между активизированным критерием 45a-45d выбора и одним или несколькими активизированным регулирующими автоматами 50a-50d.
На фиг.6 показана структура поля 36 отображения после того, как оператор 24 запустил систему 35 помощи водителю и в стартовой структуре отображения по фиг.2 активизировал поле выбора стратегии 43 управления и регулирования - «регулирующий автомат» с помощью кнопок 39, навигационной кнопки 40 или функции сенсорного экрана 41. Теперь отображаемые поля 38 выбора содержат активизацию или деактивизацию регулятора 50а скорости движения, автомата 50b обмолота, автомата 50с сепарирования и автомата 50d очистки. Кроме того, в поле 56 подсказки для оператора 24 может быть дана непосредственная подсказка, какие регулирующие автоматы 50 нужно активизировать или деактивизировать. В рамках изобретения может быть также предусмотрена возможность автоматической активизации или деактивизации регулирующих автоматов 50 устройством 23 управления и регулирования, причем эта автоматическая активизация или деактивизация, например, аннулируется при установлении ухудшения определенного параметра 47 убираемой массы или работы сельскохозяйственной рабочей машины 1 в целом.
В том случае, когда оператор 24 редактирует регулирующий автомат или регулирующие автоматы 50, устройство отображения 22 переключается на структуру поля 36 отображения по фиг.7. Теперь в поле 36 отображения визуально отображаются различные критерии 51a-51d оптимизации, причем каждый из критериев 51a-51d оптимизации вновь может быть активизирован с помощью кнопок 39 или навигационной кнопки 40 или функции сенсорного экрана. Кроме того, оператору 24 сообщается в поле 57 подсказки, что от него ожидается в визуализированной структуре отображения.
Когда все критерии 45 выбора и критерии 51 оптимизации определены, в соответствии с фиг.2 и 3, осуществляется выбор записанных в устройстве 23 управления и регулирования характеристических кривых 46, 52 и оптимизация рабочих параметров 34 рабочих органов 20 сельскохозяйственной рабочей машины 1 и в зависимости от варианта выполнения непосредственная передача генерируемых устройством 23 управления и регулирования сигналов 33 для рабочих органов на соответствующие рабочие органы 20. Одновременно устройство отображения 22 переключается на структуру поля 36 отображения по фиг.2.
Перечень позиций
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗЕРНОУБОРОЧНЫЙ КОМБАЙН | 2016 |
|
RU2708025C2 |
| ЗЕРНОУБОРОЧНЫЙ КОМБАЙН С СИСТЕМОЙ ПОМОЩИ ВОДИТЕЛЮ | 2015 |
|
RU2685153C2 |
| ЗЕРНОУБОРОЧНЫЙ КОМБАЙН | 2016 |
|
RU2708842C2 |
| САМОХОДНАЯ СЕЛЬСКОХОЗЯЙСТВЕННАЯ РАБОЧАЯ МАШИНА | 2008 |
|
RU2477038C2 |
| РАБОЧАЯ СЕЛЬСКОХОЗЯЙСТВЕННАЯ МАШИНА С ПО МЕНЬШЕЙ МЕРЕ ОДНИМ УСТРОЙСТВОМ УПРАВЛЕНИЯ И РЕГУЛИРОВАНИЯ | 2013 |
|
RU2622701C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ МАШИНА | 2005 |
|
RU2389171C2 |
| СПОСОБ ЭКСПЛУАТАЦИИ СИСТЕМЫ "АССИСТЕНТ ВОДИТЕЛЯ" ДЛЯ СЕЛЬСКОХОЗЯЙСТВЕННОЙ РАБОЧЕЙ МАШИНЫ | 2014 |
|
RU2566990C9 |
| СПОСОБ ЭКСПЛУАТАЦИИ СИСТЕМЫ "АССИСТЕНТ ВОДИТЕЛЯ" ДЛЯ СЕЛЬСКОХОЗЯЙСТВЕННОЙ РАБОЧЕЙ МАШИНЫ | 2014 |
|
RU2566658C9 |
| СИСТЕМА ПОМОЩИ ВОДИТЕЛЮ ДЛЯ СЕЛЬСКОХОЗЯЙСТВЕННОЙ РАБОЧЕЙ МАШИНЫ | 2013 |
|
RU2612444C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ УБОРОЧНАЯ МАШИНА | 2016 |
|
RU2727648C2 |
Группа изобретений относится к средствам помощи водителю при оптимизации рабочего режима сельскохозяйственной рабочей машины. Зерноуборочный комбайн включает систему помощи водителю и множество рабочих органов, обрабатывающих убранную массу. Система помощи водителю образована по меньшей мере одним устройством обработки данных и управления и по меньшей мере одним устройством отображения. Устройство обработки данных и управления обрабатывает данные, генерируемые системами датчиков машины, данные, записанные в устройстве обработки данных и управления, и/или внешние данные. Система помощи водителю содержит выбираемые стратегии управления процессом. Критерием выбора стратегии управления процессом для определенной цели использования убранной массы является требуемое качество убранной массы и/или критерии оптимизации рабочих органов. Группа изобретений обеспечивает в кратчайшее время оптимизированный рабочий режим сельскохозяйственной рабочей машины. 2 н. и 7 з.п. ф-лы, 7 ил.
1. Зерноуборочный комбайн, оснащенный системой помощи водителю, причем зерноуборочный комбайн содержит множество рабочих органов, обрабатывающих проходящую через комбайн убранную массу, а система помощи водителю образована, по меньшей мере, одним устройством обработки данных и управления и, по меньшей мере, одним устройством отображения, при этом устройство обработки данных и управления обрабатывает данные, генерируемые системами датчиков машины, данные, записанные в устройстве обработки данных и управления, и/или внешние данные, отличающийся тем, что система (35) помощи водителю содержит выбираемые стратегии (42, 43) управления процессом, при этом критерием (45) выбора стратегии (42, 43) управления процессом для определенной цели использования убранной массы (5, 11) является требуемое качество убранной массы и/или критерии (51) оптимизации рабочих органов (20), при этом критерий (45) выбора содержит такие критерии, как критерий (45a) «пищевые культуры», критерий (45b) «семенной материал», критерий (45c) «кормовые культуры» и/или критерий (45d) «технические культуры», а каждая стратегия (42) управления процессом учитывает один или несколько параметров (47) убранной массы из ряда параметров, содержащего параметр (47a) «битое зерно», параметр (47b) «чистота» и параметр (47c) «количество обмолоченного зерна», таким образом, что при активизации критерия (45a) выбора «пищевые культуры» регулирование направлено на оптимальное сочетание минимального значения параметра (47a) «битое зерно», максимального значения параметра (47c) «количество обмолоченного зерна» и максимального значения параметра (47b) «чистота», при активизации критерия (45b) выбора «семенной материал» регулирование направлено на достижение минимального значения параметра (47a) «битое зерно», а параметр (47b) «чистота» и параметр (47c) «количество обмолоченного зерна» имеют второстепенный приоритет,
при активизации критерия (45c) выбора «кормовые культуры» регулирование направлено на достижение максимального значения параметра (47c) «количество обмолоченного зерна», а параметр (47b) «чистота» и параметр (47a) «битое зерно» имеют второстепенный приоритет, при активизации критерия (45d) выбора «технические культуры» приоритет не отдается ни параметру (47a) «битое зерно», ни параметру (47b) «чистота», ни параметру (47c) «количество обмолоченного зерна».
2. Зерноуборочный комбайн по п. 1, отличающийся тем, что заложенные в характеристических линиях или алгоритмах (46) зависимости параметров (47) убранной массы критерия (45a-45d) выбора заложены в устройстве (23) управления и регулирования с возможностью редактирования.
3. Зерноуборочный комбайн по любому из пп. 1-2, отличающийся тем, что стратегии (42, 43) управления процессом могут дополнительно или альтернативно содержать критерии (51) оптимизации, в том числе критерий (51a) «максимальное качество обмолота», и/или критерий (51b) «эффективный расход топлива», и/или критерий (51c) «максимальный расход убранной массы», и/или критерий (51d) «баланс».
4. Зерноуборочный комбайн по любому из пп. 1-2, отличающийся тем, что критерии (45) выбора и/или критерии (51) оптимизации отображаются с возможностью выбора для оператора (24) зерноуборочного комбайна (2) на устройстве (22) отображения, при этом выбор может осуществляться с помощью сенсорного экрана (41) или с помощью кнопок (39, 40), а определяемая посредством активизированного критерия (45) выбора и/или критерия (51) оптимизации стратегия (42, 43) управления процессом преобразуется в записанные в устройстве (23) управления и регулирования характеристические кривые или алгоритмы (46, 52).
5. Зерноуборочный комбайн по п. 4, отличающийся тем, что рабочие органы (20) выполнены с возможностью регулирования рабочего режима посредством регулирующих автоматов (50), а регулирующие автоматы (50) охватывают, по меньшей мере, регулятор (50a) скорости движения, и/или автомат (50b) обмолота, и/или автомат (50c) сепарации, и/или автомат (50d) очистки.
6. Зерноуборочный комбайн по любому из пп. 1-2, 5, отличающийся тем, что в поле (55) подсказки устройства (22) отображения помещается общая подсказка о том, что воздействия имеются и какие именно воздействия выбранная на основе критерия (45) выбора или критерия (51) оптимизации стратегия (42, 43) управления процессом оказывает на действие регулирующих автоматов (50) и/или параметры (47) убранной массы.
7. Зерноуборочный комбайн по п. 5, отличающийся тем, что регулирующие автоматы (50) выполнены с возможностью редактирования их действия, а редактирование может осуществляться на основе диалога через посредство устройства (22) отображения, при этом один или несколько регулирующих автоматов (50) могут быть включены, или выключены, или отредактированы оператором (24) или автоматически посредством устройства (23) управления и регулирования.
8. Зерноуборочный комбайн по п. 7, отличающийся тем, что устройство (23) управления и регулирования выполнено с возможностью вырабатывать оптимизированные предложения по настройке одного или нескольких регулирующих автоматов (50) и отображать для оператора (24) на диалоговом поле устройства (22) отображения.
9. Способ эксплуатации зерноуборочного комбайна, заявленного в любом из пп. 1-8, отличающийся тем, что содержит следующие шаги:
a) на первом шаге меню оператору (24) сельскохозяйственной рабочей машины (1, 2) предлагают сделать выбор стратегии (42, 43) управления процессом, причем стратегия (42, 43) управления процессом альтернативно или одновременно предусматривает активизацию критерия (45) выбора, определяющего качество убранной массы (5, 11), и/или критерия (51) оптимизации, определяющего рабочий режим рабочих органов (20),
b) в зависимости от выбранной стратегии (42, 43) управления процессом на следующем шаге меню оператору (24) предлагают для выбора критерий (45а-45d) выбора и/или для активизации регулирующий автомат (50a-50d) и относящийся к нему критерий (51) оптимизации,
c) в зависимости от активизированной оператором (24) сельскохозяйственной рабочей машины (1, 2) стратегии (42, 43) управления процессом с помощью системы (35) помощи водителю определяют оптимизированные рабочие параметры (34), по меньшей мере, для одного рабочего органа (20) и осуществляют настройку оптимизированного рабочего параметра (34), по меньшей мере, на одном рабочем органе (20).
| US 6119442 A, 19.09.2000; |

