Область техники, к которой относится изобретение
Настоящее изобретение относится к сельскохозяйственной машине в соответствии с ограничительной частью пункта 1 формулы изобретения.
Уровень техники
В патентном документе ЕР 1321025 описан зерноуборочный комбайн с автоматическим устройством управления для регулирования скорости движения. Устройство управления изменяет скорость движения для регулирования пропускной способности зерноуборочного комбайна и активируется, как только датчик высоты слоя убранной массы сигнализирует о поступлении убранной массы в подающее устройство зерноуборочного комбайна. Это техническое решение является ближайшим аналогом заявляемого изобретения.
Недостаток этой известной уборочной машины состоит в том, что система автоматического регулирования скачкообразно изменяет скорость движения, когда зерноуборочный комбайн въезжает в растительность и включается регулятор скорости движения.
В известных комбайнах регулятор скорости движения остается включенным также и при выезде из растительности или при переезде пустых участков на поле и при этом он ускоряет движение зерноуборочного комбайна для компенсации падающего расхода убранной массы. В этих случаях водитель отключает систему автоматического регулирования и регулирует скорость движения вручную, - например, для того, чтобы произвести на конце поля поворот с подходящей скоростью движения. Скачкообразное изменение скорости движения при въезде в растительность или выезде из нее часто приводит к чрезмерной реакции водителя, который как можно быстрее производит торможение вплоть до остановки, что раскачивает комбайн. Кроме того, перед въездом в растительность скорость движения комбайна не ускоряется или замедляется оптимальным для этого въезда образом.
Раскрытие изобретения
Задача, на решение которой направлено настоящее изобретение, заключается в создании уборочной машины, в которой за счет регулятора водитель разгружен от необходимости регулирования скорости движения.
В соответствии с изобретением решение поставленной задачи достигается за счет отличительных признаков, изложенных в пункте 1 формулы изобретения. Другие особенности изложены в зависимых пунктах.
В самоходной сельскохозяйственной машине, содержащей рабочие аппараты, рабочие параметры которых являются регулируемыми, и движущейся со скоростью (V) движения, согласно изобретению скорость движения регулируется по меньшей мере в соответствии с двумя стратегиями движения, так что водитель освобожден от регулирования скорости движения в различных ситуациях эксплуатации. Регулятор скорости движения производит регулирование скорости движения таким образом, что зерноуборочный комбайн не совершает внезапного ускорения или торможения, что создает удобство для водителя и позволяет ему полагаться на надежное автоматическое регулирование.
За счет того, что стратегия движения является изменяемой в зависимости от холостого режима или рабочего режима, регулирование скорости движения индивидуально адаптируется к конкретному режиму эксплуатации.
Предпочтительно в холостом режиме связь регулирования скорости движения с параметрами убираемой массы и/или рабочими параметрами сельскохозяйственной машины прерывается, так что в холостом режиме скорость движения может регулироваться отдельно, независимо от расхода убранной массы и/или от эффективности обработки убранной массы.
За счет того, что регулирование скорости движения в рабочем режиме осуществляется в зависимости по меньшей мере от одного параметра убираемой массы и/или по меньшей мере одного рабочего параметра сельскохозяйственной машины, при установке скорости движения может учитываться требуемый расход убранной массы и одновременно требуемая эффективность обработки убранной массы.
Благодаря тому, что скорость движения регулируется полностью автоматически посредством регулятора, водитель во время рабочего движения уборки на поле полностью освобожден от регулирования скорости движения.
Регулирование скорости движения производится в зависимости по меньшей мере от одного параметра убираемой массы и/или по меньшей мере от одного рабочего параметра сельскохозяйственной машины, когда регулятор скорости движения распознает, что сельскохозяйственная машина находится в рабочем режиме, так что регулятор учитывает величины, существенные для скорости движения.
Предпочтительно связь регулирования скорости движения с параметрами убираемой массы и/или рабочими параметрами сельскохозяйственной машины прерывается, когда регулятор скорости движения распознает, что сельскохозяйственная машина находится в холостом режиме, так что регулятор скорости движения регулирует скорость движения независимо от величин, которые в этом случае не являются существенными.
Для дальнейшей разгрузки водителя и для того, чтобы регулятор скорости движения автоматически менял стратегию движения при изменении режима эксплуатации, регулятор скорости движения связан с одним или несколькими датчиками и по сигналам, генерируемым этим датчиком или датчиками, распознает, находится ли сельскохозяйственная машина в холостом режиме или в рабочем режиме.
Предпочтительно датчик или датчики детектируют по меньшей мере рабочий режим рабочих аппаратов сельскохозяйственной машины. За счет этого регулятор скорости движения распознает, включен ли или настроен ли оптимальным образом рабочий аппарат, требуемый для данного режима.
В следующем примере осуществления изобретения датчик или датчики детектируют скорость движения и направление движения сельскохозяйственной машины. За счет этого регулятор скорости движения распознает, в каком направлении движется зерноуборочный комбайн и движется ли он по меньшей мере с минимальной скоростью.
В следующем примере осуществления датчик или датчики детектируют расход убранной массы в сельскохозяйственной машине, и за счет этого регулятор скорости движения распознает, убирает ли зерноуборочный комбайн зерновые в процессе рабочего движения уборки.
Предпочтительно скорость движения в холостом режиме является постоянной и имеет величину, по существу соответствующую величине скорости движения в конце движения в рабочем режиме при переходе к холостому режиму. Благодаря этому регулятор скорости движения не производит внезапного ускорения или торможения сельскохозяйственной машины.
В предпочтительном примере осуществления изобретения сельскохозяйственная машина является зерноуборочным комбайном, который в рабочем режиме движется через растительность, а в холостом режиме осуществляет разворот на краю поля.
Когда по меньшей мере один из сигналов, генерируемый датчиком или датчиками, является зависимым от положения органов управления, характерного для холостого режима или рабочего режима, и определяемого водителем, может быть определено, включены ли рабочие аппараты, требуемые для данного режима, и/или имеются ли регулировки, требуемые для данного режима.
Когда по меньшей мере один из сигналов, генерируемый датчиком или датчиками, является зависимым от положения сельскохозяйственной машины, на основе данных о пройденном пути может быть установлено, какой участок поля уже обойден, и, следовательно, на нем больше нет растительности, так что пустые участки в растительности могут быть распознаны уже перед рабочим движением.
В дальнейшем предпочтительном примере осуществления изобретения обработка сигналов осуществляется в устройстве управления и регулирования.
Другие особенности изобретения являются предметом защиты в дальнейших зависимых пунктах формулы изобретения.
Перечень фигур чертежей
Далее со ссылками на прилагаемые чертежи будет подробно описан пример осуществления изобретения. На чертежах:
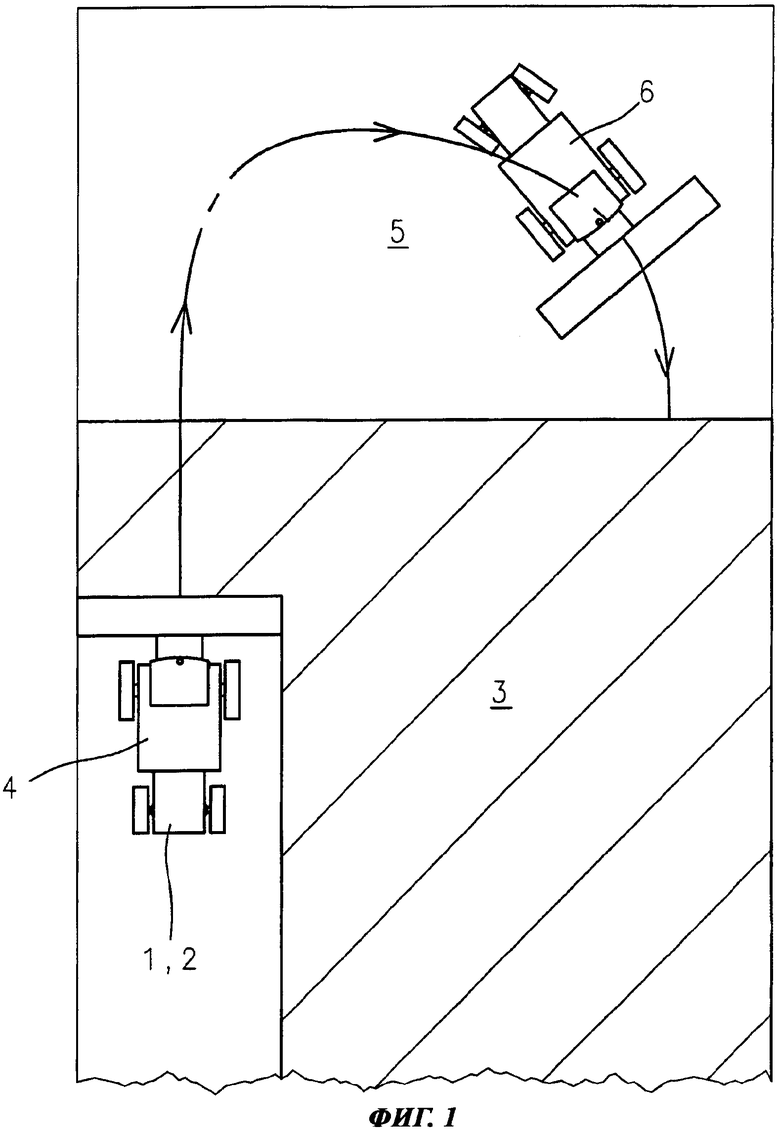
фиг.1 изображает на виде сверху зерноуборочный комбайн при рабочем движении уборки на поле,
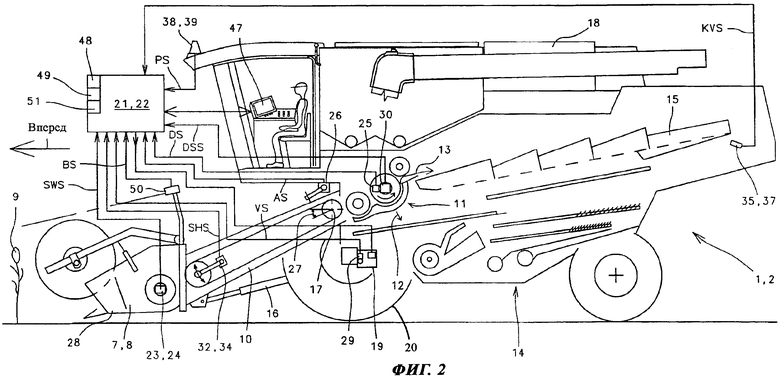
фиг.2 изображает на виде сбоку зерноуборочный комбайн по изобретению,
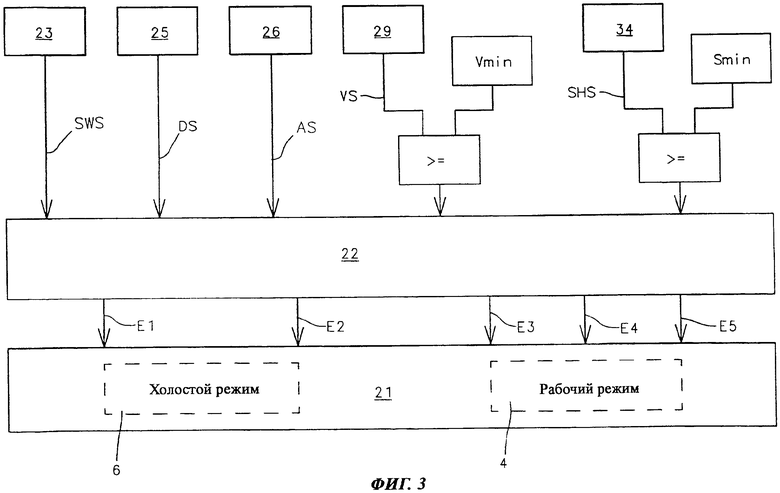
фиг.3 изображает блок-схему регулятора скорости движения с устройством управления и регулирования.
Сведения, подтверждающие возможность осуществления изобретения
На фиг.1 показана в процессе рабочего движения уборки на поле сельскохозяйственная машина 2, выполненная в виде зерноуборочного комбайна 1. Когда зерноуборочный комбайн 1 движется в растущей на поле растительности 3 в виде зерновой культуры, он находится в рабочем режиме 4 эксплуатации, при котором производит срезание, прием и обработку зерновой культуры. Как только комбайн 1 выезжает из растительности 3 для осуществления разворота 5 на краю поля или, например, если растительность прерывается пустым участком, он движется в холостом режиме 6 эксплуатации, так как растительность отсутствует.
Показанная частично на фиг.2 самоходная сельскохозяйственная машина 2 в виде зерноуборочного комбайна 1 оснащена спереди навесным аппаратом 8, выполненным в виде жатвенного аппарата 7, который срезает растущую на поле убираемую массу 9 и затем передает ее на наклонный питатель 10. Наклонный питатель 10 передает убранную массу 9 на расположенный сзади молотильный аппарат 11, который обрабатывает убранную массу 9, разделяя ее на смесь 12 зерна с половой и поток 13, состоящий из обмолоченной соломы. Смесь 12 зерна с половой транспортируется к очистному устройству 14, в котором зерно отделяется от не содержащих зерна фракций, то есть от частиц соломы и половы. Состоящий из обмолоченной соломы поток 13 убранной массы поступает на клавишный соломотряс 15, который транспортирует его в заднюю область зерноуборочного комбайна 1 и при этом отделяет содержащееся в потоке зерно, соломенную труху и полову. Эти фракции также направляются к очистному устройству 14.
При движении комбайна наклонный питатель 10 ведется с возможностью поворота вокруг оси 17 поворота, расположенной поперечно направлению ВПЕРЕД движения, посредством подъемного цилиндра 16. Подъемный цилиндр 16 одним концом шарнирно соединен с комбайном 1, а его шток шарнирно соединен с наклонным питателем 10. Зерноуборочный комбайн 1 оснащен двигателем 18 внутреннего сгорания, который приводит в движение привод 19 ходовой части для привода передних колес комбайна 1, привод молотильного аппарата 11 и привод жатвенного аппарата 7.
Привод 19 ходовой части оснащен регулятором 21 скорости движения, в дальнейшем называемым для краткости «регулятором 21», который полностью автоматически регулирует скорость V движения зерноуборочного комбайна 1. Регулятор 21 содержит устройство 22 управления и регулирования, связанное с несколькими датчиками 23, 25, 26, 29, 30, 34, 37, 39, 50, расположенными на зерноуборочном комбайне 1 и на жатвенном аппарате 7.
На переднем конце жатвенного аппарата 7 расположен датчик 50 растительности, воспринимающий растительность, которая находится перед комбайном 1 в направлении его движения "ВПЕРЕД". Датчик 50 растительности генерирует сигналы BS растительности в зависимости от зеленого покрова поля. Следующий датчик 25 контролирует включатель-выключатель молотильного аппарата 11 и генерирует сигналы DS молотильного аппарата в зависимости от его рабочего статуса. Третий датчик 23 контролирует включатель-выключатель 24 жатвенного аппарата 7 и генерирует сигнал SWS жатвенного аппарата в зависимости от его рабочего статуса.
Датчик 26 угла поворота расположен в оси 17 поворота наклонного питателя 10 и известным образом детектирует угол 27 поворота между наклонным питателем 10 и комбайном 1. При определенной величине угла поворота, при которой жатвенный аппарат 7 занимает рабочее положение 28, датчик 26 угла поворота генерирует сигнал AS рабочего положения.
На приводе 19 ходовой части расположен датчик 29 числа оборотов, который известным образом детектирует скорость V движения и направление "ВПЕРЕД" движения зерноуборочного комбайна 1. Датчик 29 числа оборотов генерирует сигнал VS скорости движения, пропорциональный скорости V движения комбайна 1.
Датчик 30 расхода известным образом расположен на приводе молотильного аппарата и детектирует крутящий момент на молотильном барабане, зависящий от расхода потока убранной массы через молотильный аппарат 11. Датчик 30 расхода генерирует сигнал DSS расхода, пропорциональный расходу потока убранной массы через молотильный аппарат 11.
Наклонный питатель 10 снабжен устройством 32 определения высоты слоя убранной массы, которое само по себе известно и детектирует высоту слоя убранной массы в наклонном питателе. Устройство 32 определения высоты слоя снабжено датчиком 34, генерирующим сигнал SHS высоты слоя, пропорциональный высоте слоя убранной массы.
На конце клавишного соломотряса 15 расположено устройство 35 измерения зернового потока, воспринимающее потери очистки в потоке 13 убранной массы. Устройство 35 измерения зернового потока содержит несколько датчиков 37 ударов, которые известным образом генерируют сигналы KVS потерь зерна, пропорциональные потерям очистки.
Дополнительно зерноуборочный комбайн оснащен устройством 38 определения положения, определяющим положение зерноуборочного комбайна 1. Устройство 38 определения положения содержит датчики 39, которые генерируют сигнал PS положения, зависящий от местоположения комбайна 1.
На фиг.3 схематично представлен регулятор 21 с устройством 22 управления и регулирования и частью связанных с ним датчиков 23, 25, 26, 29, 30, 34, 37, 39, 50.
Устройство 22 управления и регулирования сравнивает вырабатываемые датчиками 34 сигналы SHS высоты слоя с предварительно заданной минимальной высотой Smin слоя. Если установленная высота слоя равна или больше минимальной высоты Smin, устройство 22 управления и регулирования генерирует сигнал Е5 рабочего режима, передаваемый на регулятор 21. При приеме сигнала Е5 рабочего режима регулятор 21 распознает, что зерноуборочный комбайн 1 находится в рабочем режиме 4, а если он не получает сигнала Е5 рабочего режима, то он определяет, что комбайн находится в холостом режиме 6.
Для повышения качества распознавания возможен вариант осуществления, при котором регулятор 21, например, распознает рабочий режим 4 или холостой режим 6 только тогда, когда на него передаются другие сигналы Е1-Е4.
Устройство 22 управления и регулирования сравнивает генерируемый датчиком 25 сигнал DS молотильного аппарата с предварительно заданной величиной для включения и за счет этого определяет рабочее состояние молотильного аппарата 11. Если молотильный аппарат 11 включен, устройство 22 управления и регулирования генерирует первый сигнал Е1 рабочего режима.
Возможен также вариант осуществления, при котором устройство 22 управления и регулирования сравнивает генерируемый датчиком 23 сигнал SWS жатвенного аппарата с заданной величиной для включения жатвенного аппарата 7 и за счет этого определяет рабочее состояние жатвенного аппарата 7. Если жатвенный аппарат 7 включен, устройство 22 управления и регулирования генерирует второй сигнал Е2 рабочего режима.
Возможен также вариант осуществления, при котором устройство 22 управления и регулирования сравнивает генерируемый датчиком 26 угла поворота сигнал AS рабочего положения с предварительно заданной величиной рабочего положения и за счет этого определяет рабочее положение жатвенного аппарата 7. Если жатвенный аппарат 7 находится в рабочем положении 28, устройство 22 управления и регулирования генерирует третий сигнал ЕЗ рабочего режима.
Далее, возможен вариант осуществления, при котором устройство 22 управления и регулирования сравнивает генерируемые датчиком 29 числа оборотов сигналы VS скорости движения с заданной величиной скорости движения и распознает, движется ли зерноуборочный комбайн 1 с минимальной скоростью Vmin. Если скорость движения зерноуборочного комбайна 1 равна или больше минимальной скорости Vmin, устройство 22 управления и регулирования генерирует четвертый сигнал Е4 рабочего режима.
В дальнейшем примере выполнения изобретения регулятор 21 может быть связан посредством устройства 22 управления и регулирования с датчиком 50 растительности. В зависимости от генерируемых датчиком 50 сигналов BS растительности регулятор 21 распознает, находится ли зерноуборочный комбайн среди растительности или за ее пределами, то есть находится ли он в холостом режиме 6 или в рабочем режиме 4.
Возможен также вариант, при котором регулятор 21 связан с устройством 38 определения положения. В этом случае в зависимости от уже пройденного пути, а также ширины захвата жатвенного аппарата 7 и карты участка регулятор 21 распознает, находится ли комбайн в холостом режиме 6 или в рабочем режиме 4.
В соответствии с изобретением в зависимости от рабочего режима 4 или холостого режима 6 скорость V движения зерноуборочного комбайна 1 регулируется согласно различным стратегиям движения.
Когда регулятор 21 распознает, что зерноуборочный комбайн 1 находится в рабочем режиме 4, он регулирует скорость V движения в зависимости от параметра убираемой массы, такого как, например, потери очистки, определяемые устройством 35 измерения зернового потока, и/или в зависимости от рабочего параметра зерноуборочного комбайна 1, такого как, например, высота слоя массы в наклонном питателе 10. С помощью устройства 47 ввода команд, связанного с регулятором 21, водитель задает граничную величину 48 потерь зерна, по которой регулятор 21 вычисляет заданную высоту слоя для наклонного питателя 10. Регулятор 21 регулирует скорость V движения таким образом, что высота слоя достигает расчетной заданной высоты 49 слоя. Регулятор 21 сравнивает потери очистки с граничной величиной 48 потерь зерна. Если потери очистки в течение определенного промежутка времени превышают граничную величину 48 потерь зерна, скорость V движения снижается до тех пор, пока потери очистки не станут соответствовать граничной величине 48 потерь зерна, при этом одновременно устанавливается новая заданная высота 49 слоя. Если потери очистки в течение заданного промежутка времени остаются меньше граничной величины 48 потерь зерна, скорость V движения повышается до тех пор, пока потери зерна не станут соответствовать граничной величине 48 потерь зерна. Во время рабочего режима 4 регулятор 21 непрерывно актуализирует высоту слоя путем изменения скорости V движения, чтобы адаптироваться к различным условиям уборки.
Когда регулятор 21 распознает, что зерноуборочный комбайн 1 находится в холостом режиме 6, связь регулирования скорости V движения регулятором 21 с параметрами убираемой массы или рабочими параметрами зерноуборочного комбайна 1 прерывается. В холостом режиме 6 скорость V движения может управляться в соответствии с любой характеристической кривой в регуляторе 21. В первом примере осуществления изобретения скорость движения является по существу постоянной и имеет величину, по существу соответствующую величине скорости V движения в конце движения в рабочем режиме 4, когда комбайн 1 выезжает из растительности. Возможно также перед въездом в растительность торможение или ускорение скорости движения комбайна до величины скорости въезда.
Как только жатвенный аппарат 7 и/или молотильный аппарат 11 выключаются и/или жатвенный аппарат 7 поворачивается вверх из рабочего положения и/или зерноуборочный комбайн 1 движется с минимальной скоростью Vmin, это означает, что комбайн не находится ни в рабочем режиме 4, ни в холостом режиме 6, и один или несколько сигналов Е1-Е4 не передаются на регулятор 21. При этом регулятор 21 отключается, и водитель регулирует скорость V движения вручную с помощью рычага 51 скоростей. Однако имеется также возможность отключения регулятора 21 водителем посредством привода в действие рычага 51 скоростей.
На индикаторном устройстве водителю указывается, находится ли зерноуборочный комбайн 1 в рабочем режиме 4 или в холостом режиме 6 и с использованием какой стратегии движения регулятор 21 регулирует скорость V движения комбайна.
Для специалиста в данной области понятно, что при осуществлении изобретения возможны различные изменения и модификации, не выходящие за пределы объема защиты, а также использование его в других машинах для получения описанных преимуществ.
Так, например, изобретение может использоваться в тракторе по меньшей мере с одним рабочим орудием, соединенным с трактором. Таким рабочим орудием может быть плуг, который в рабочем режиме находится в нижнем положении и врезается в почву, а в холостом режиме поднят над землей в верхнее положение.
| название | год | авторы | номер документа |
|---|---|---|---|
| САМОХОДНАЯ СЕЛЬСКОХОЗЯЙСТВЕННАЯ РАБОЧАЯ МАШИНА | 2008 |
|
RU2477038C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПОВЕРХНОСТНОЙ ВЛАЖНОСТИ | 2005 |
|
RU2361385C2 |
| CИСТЕМА ПОМОЩИ ДЛЯ ВОДИТЕЛЯ СЕЛЬСКОХОЗЯЙСТВЕННОЙ РАБОЧЕЙ МАШИНЫ | 2011 |
|
RU2565225C2 |
| САМОХОДНАЯ УБОРОЧНАЯ МАШИНА | 2016 |
|
RU2711340C2 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ УБОРОЧНОЙ СЕЛЬХОЗМАШИНОЙ | 2006 |
|
RU2402191C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННОЕ РАБОЧЕЕ ТРАНСПОРТНОЕ СРЕДСТВО И УСТРОЙСТВО ОТОБРАЖЕНИЯ ДЛЯ НЕГО | 2010 |
|
RU2527759C2 |
| СЕЛЬХОЗМАШИНА С ФУНКЦИЕЙ ЭКСТРЕННОЙ ОСТАНОВКИ | 2009 |
|
RU2492619C2 |
| ЗЕРНОУБОРОЧНЫЙ КОМБАЙН И СПОСОБ ЕГО ЭКСПЛУАТАЦИИ | 2005 |
|
RU2384994C2 |
| СПОСОБ ЭКСПЛУАТАЦИИ СЕЛЬСКОХОЗЯЙСТВЕННОЙ РАБОЧЕЙ МАШИНЫ | 2013 |
|
RU2621252C2 |
| СПОСОБ ЭКСПЛУАТАЦИИ СИСТЕМЫ "АССИСТЕНТ ВОДИТЕЛЯ" ДЛЯ СЕЛЬСКОХОЗЯЙСТВЕННОЙ РАБОЧЕЙ МАШИНЫ | 2014 |
|
RU2566990C9 |
Изобретение относится к сельскохозяйственному машиностроению. Самоходная сельскохозяйственная машина содержит рабочие аппараты, рабочие параметры которых являются регулируемыми. Скорость движения сельскохозяйственной машины регулируется автоматически в соответствии с несколькими стратегиями движения. Стратегия движения является изменяемой в зависимости от холостого или рабочего режимов работы сельскохозяйственной машины. Использование изобретения позволяет освободить водителя от регулирования скорости движения. 14 з.п. ф-лы, 3 ил.
1. Самоходная сельскохозяйственная машина (2), содержащая рабочие аппараты (7, 11, 14), рабочие параметры которых являются регулируемыми, и движущаяся со скоростью (V) движения, отличающаяся тем, что скорость (V) движения автоматически регулируется, по меньшей мере, в соответствии с двумя стратегиями движения, причем стратегия движения является изменяемой в зависимости от холостого режима (6) или рабочего режима (4) сельскохозяйственной машины (2).
2. Сельскохозяйственная машина по п.1, отличающаяся тем, что в холостом режиме (6) связь регулирования скорости (V) движения с параметрами убираемой массы и/или рабочими параметрами сельскохозяйственной машины (2) прерывается.
3. Сельскохозяйственная машина по п.1, отличающаяся тем, что регулирование скорости (V) движения в рабочем режиме осуществляется в зависимости, по меньшей мере, от одного параметра убираемой массы и/или, по меньшей мере, одного рабочего параметра сельскохозяйственной машины (2).
4. Сельскохозяйственная машина по любому из пп.1 и 3, отличающаяся тем, что скорость (V) движения регулируется полностью автоматически посредством регулятора (21) скорости движения.
5. Сельскохозяйственная машина по п.4, отличающаяся тем, что скорость (V) движения регулируется в зависимости, по меньшей мере, от одного параметра убираемой массы и/или, по меньшей мере, от одного рабочего параметра сельскохозяйственной машины (2), когда регулятор (21) скорости движения распознает, что сельскохозяйственная машина (2) находится в рабочем режиме (4).
6. Сельскохозяйственная машина по п.2, отличающаяся тем, что связь регулирования скорости (V) движения с параметрами убираемой массы и/или рабочими параметрами сельскохозяйственной машины (2) прерывается, когда регулятор (21) скорости движения распознает, что сельскохозяйственная машина (2) находится в холостом режиме (6).
7. Сельскохозяйственная машина по п.1, отличающаяся тем, что регулятор (21) скорости движения связан с одним или несколькими датчиками (23, 25, 26, 29, 30, 34, 37, 39, 50) и посредством обработки генерируемых, по меньшей мере, одним датчиком (23, 25, 26, 29, 30, 34, 37, 39, 50) сигналов (BS, SHS, DSS, VS, AS, SWS, DS, KVS) распознает, находится ли сельскохозяйственная машина (2) в холостом режиме (6) или в рабочем режиме (4).
8. Сельскохозяйственная машина по п.7, отличающаяся тем, что датчик или датчики (23, 25, 26) детектируют, по меньшей мере, рабочий режим рабочих аппаратов (11, 7) сельскохозяйственной машины (2).
9. Сельскохозяйственная машина по п.7, отличающаяся тем, что датчик или датчики (29) детектируют скорость (V) движения и направление «ВПЕРЕД» движения сельскохозяйственной машины (2).
10. Сельскохозяйственная машина по п.7, отличающаяся тем, что датчик или датчики (30, 34) детектируют расход убранной массы в сельскохозяйственной машине (2).
11. Сельскохозяйственная машина по п.1, отличающаяся тем, что скорость (V) движения в холостом режиме (6) является постоянной и имеет величину, по существу, соответствующую величине скорости (V) движения в конце движения в рабочем режиме (4) при переходе к холостому режиму (6).
12. Сельскохозяйственная машина по п.1, отличающаяся тем, что сельскохозяйственная машина (2) является зерноуборочным комбайном (1), который в рабочем режиме (4) движется через растительность, а в холостом режиме (6) осуществляет разворот на краю поля.
13. Сельскохозяйственная машина по п.7, отличающаяся тем, что, по меньшей мере, один из сигналов (DS, SWS), генерируемый датчиком или датчиками (23, 25), является зависимым от положения органов управления, характерного для холостого режима или рабочего режима и определяемого водителем.
14. Сельскохозяйственная машина по п.7, отличающаяся тем, что, по меньшей мере, один из сигналов (PS), генерируемый датчиком или датчиками (39), является зависимым от положения сельскохозяйственной машины (2).
15. Сельскохозяйственная машина по п.7, отличающаяся тем, что обработка сигналов (BS, SHS, DSS, VS, AS, SWS, DS, KVS) осуществляется в устройстве (22) управления и регулирования.
| US 4513562 А, 30.04.1985 | |||
| US 4487002 А, 11.12.1984 | |||
| US 6336051 В1, 01.01.2002 | |||
| СПОСОБ ЭКСПЛУАТАЦИИ КОМБАЙНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2152147C1 |
| СПОСОБ УПРАВЛЕНИЯ РАБОТОЙ УБОРОЧНОЙ МАШИНЫ | 1994 |
|
RU2078170C1 |

