Область техники
Настоящее изобретение относится к самоходной сельскохозяйственной рабочей машине в соответствии с ограничительной частью пункта 1 формулы изобретения.
Уровень техники
Из патентного документа ЕР 1321025 А известна выполненная в виде зерноуборочного комбайна самоходная сельскохозяйственная рабочая машина с автоматическим устройством управления для регулирования скорости движения. Устройство управления изменяет скорость движения для регулирования расхода убранной массы через комбайн и активизируется, когда устройство восприятия высоты слоя убранной массы сообщает о поступлении убранной массы в транспортирующее устройство комбайна.
Из патентного документа DE 102004059543 А1 данного заявителя известна самоходная сельскохозяйственная рабочая машина, в которой скорость движения регулируется с помощью приоритетного регулятора движения в зависимости от различных ситуаций эксплуатации в соответствии различными стратегиями движения. Принцип действия и преимущества регулирования скорости движения посредством такого приоритетного регулятора движения описаны в данном документе, так что признаки такого решения включены в данное описание в качестве ссылки.
Практические испытания показали, что регулирование скорости движения с помощью приоритетного регулятора движения в целях регулирования расхода убранной массы в самоходной сельскохозяйственной рабочей машине ограничивается различными параметрами убранной массы и/или рабочими параметрами машины. Так, например, при очень редкой убираемой растительности расход падает, и приоритетный регулятор движения вынужденным образом повышал бы скорость движения. Однако для обеспечения стабильного движения и надежности рабочей машины она может эксплуатироваться во время рабочего процесса только с определенной максимальной скоростью. После повышения скорости движения до максимальной допустимой скорости рабочего движения приоритетный регулятор движения не может повышать ее дальше. Поскольку оператору рабочей машины понятно, что желаемый расход убранной массы не соответствует действительному получаемому расходу, он пытается настроить рабочие параметры рабочей машины в соответствии с действительным расходом. Однако это требует от водителя значительной компетенции. Кроме того, максимальная допустимая скорость рабочего движения является только одним из множества ограничивающих факторов для регулирования скорости движения с помощью приоритетного регулятора движения, так что перед оператором встает та проблема, что он не знает, какой рабочий параметр выгодно отрегулировать, чтобы получить оптимальный рабочий результат.
Раскрытие изобретения
Задачей изобретения является устранение описанных недостатков известных решений уровня техники и в особенности усовершенствование самоходной сельскохозяйственной рабочей машины в соответствии с ограничительной частью пункта 1 формулы изобретения таким образом, что при регулировании скорости движения машины посредством приоритетного регулятора движения оператор рабочей машины получает в распоряжение целенаправленную информацию о режиме и возможности воздействия на приоритетный регулятор движения.
В соответствии с изобретением решение поставленной задачи достигается за счет признаков по пункту 1 формулы изобретения.
Согласно изобретению для оператора рабочей машины в блоке управления, обслуживания и отображения отображается непосредственно параметр убранной массы и/или рабочий параметр рабочей машины, который фактически ограничивает регулирование скорости движения посредством приоритетного регулятора движения. За счет этого оператор всегда получает в распоряжение фактическую и целенаправленную информацию о том, какой параметр убранной массы и/или рабочий параметр рабочей машины воздействует ограничивающим образом на автоматическое регулирование скорости движения приоритетным регулятором движения. При этом оператор может целенаправленно решать, следует ли ему отрегулировать отдельный рабочий параметр в соответствии с изменившейся скоростью движения и, следовательно, в соответствии с изменившимся расходом убранной массы, или ему следует изменить настройки, чтобы они не оказывали такого серьезного воздействия на рабочий результат рабочей машины.
Для того, чтобы оператор мог быстро и интуитивно воспринимать отображаемые для него различные ограничивающие параметры убранной массы и/или рабочие параметры рабочей машины, в предпочтительном решении по развитию изобретения параметр убранной массы и/или рабочий параметр рабочей машины, который фактически ограничивает регулирование скорости движения посредством приоритетного регулятора движения, отображается в блоке управления, обслуживания и отображения в виде пиктограммы. Здесь под отображением имеется в виду, например, представление на имеющемся на рабочей машине дисплее и/или активизация соответствующих предупредительных световых индикаторов, причем как дисплей, так и предупредительные световые индикаторы являются элементами блока управления, обслуживания и отображения.
Для того, чтобы оператор мог быстро и просто воспринимать отображаемые для него различные ограничивающие параметры убранной массы и/или рабочие параметры рабочей машины, в предпочтительном решении по развитию изобретения параметр убранной массы и/или рабочий параметр рабочей машины, который фактически ограничивает регулирование скорости движения посредством приоритетного регулятора движения, отображается в блоке управления, обслуживания и отображения в виде обозначения. Здесь под отображением имеется в виду, например, представление на имеющемся на рабочей машине дисплее и/или активизация соответствующих предупредительных световых индикаторов, причем как дисплей, так и предупредительные световые индикаторы являются элементами блока управления, обслуживания и отображения.
Само собой разумеется, что параметр убранной массы и/или рабочий параметр рабочей машины, который фактически ограничивает регулирование скорости движения посредством приоритетного регулятора движения, может отображаться для оператора в блоке управления, обслуживания и отображения как в виде пиктограммы, так и в виде обозначения, так что оператор может очень легко и целенаправленно воспринять информацию. Альтернативно он может с помощью соответствующей настройки блока управления, обслуживания и отображения выбрать, в каком виде будет отображаться предназначенная для него информация.
В предпочтительном примере выполнения параметр убранной массы и/или рабочий параметр рабочей машины, который фактически ограничивает регулирование скорости движения посредством приоритетного регулятора движения, отображается в выделенном окне экрана блока управления, обслуживания и отображения, что упрощает восприятие информации оператором. Оператор воспринимает информацию особенно быстро и интуитивно, когда выделенное окно экрана, по меньшей мере, временно и/или частично перекрывает другие окна экрана блока управления, обслуживания и отображения, так что важная для оператора актуальная информация помещается на первом плане.
В предпочтительном примере выполнения для, по меньшей мере, одного параметра убранной массы и/или рабочего параметра рабочей машины может быть установлен, по меньшей мере, нижний предел регулирования, или верхний предел регулирования, или нижний и верхний пределы регулирования. Таким образом, регулирование скорости движения посредством приоритетного регулятора движения производится в четко определенных пределах, которые могут зависеть как от надежности или безопасности, так и от стабильности движения рабочей машины и от внешних рамочных условий. В предпочтительном примере выполнения соответствующие пределы регулирования могут быть введены и/или изменены посредством блока управления, обслуживания и отображения, так что оператор может индивидуально устанавливать наиболее подходящие на его взгляд пределы регулирования.
Для того, чтобы не только предоставить в распоряжение оператора рабочей машины информацию о том, какой параметр убранной массы и/или рабочий параметр воздействует ограничивающим образом, но также дополнительно обеспечить ему возможность сделать заключение о том, насколько оптимально выбраны установленные пределы регулирования, в предпочтительном примере по развитию изобретения для него в блоке управления, обслуживания и отображения отображается как параметр убранной массы и/или рабочий параметр рабочей машины, который фактически ограничивает регулирование скорости движения посредством приоритетного регулятора движения, так и пределы регулирования, установленные для соответствующего параметра убранной массы и/или рабочего параметра рабочей машины.
В предпочтительном примере выполнения рабочим параметром рабочей машины, ограничивающим регулирование скорости движения посредством приоритетного регулятора движения, является скорость движения. При этом во все время движения в ходе рабочего процесса обеспечивается стабильность и безопасность движения рабочей машины.
В предпочтительном примере выполнения рабочим параметром рабочей машины, ограничивающим регулирование скорости движения посредством приоритетного регулятора движения, является нагрузка двигателя. За счет этого предотвращается перегрузка двигателя и/или двигатель может работать в диапазоне чисел оборотов, в котором обеспечивается по возможности минимальный расход топлива. В этом случае пределы регулирования устанавливаются соответствующим образом.
В предпочтительном примере выполнения рабочим параметром рабочей машины, ограничивающим регулирование скорости движения посредством приоритетного регулятора движения, является состояние одного или нескольких рабочих аппаратов и/или их рабочих сред. За счет этого, например, предотвращается перегрев двигателя из-за недостаточного количества охлаждающей жидкости в системе охлаждения двигателя, или, например, предотвращается работа гидронасоса всухую из-за недостаточности гидравлической жидкости в питающей системе, или, например, предотвращается недостаточная смазка двигателя из-за того, что температура моторного масла находится в критической области. Указанные здесь примеры являются представителями множества состояний одного или нескольких рабочих аппаратов и/или их рабочих сред, которые могут ограничивать регулирование скорости движения посредством приоритетного регулятора движения. Под рабочими средами имеются в виду необходимые для функционирования рабочих аппаратов газы и/или жидкости, такие как воздух под давлением, гидравлическое масло, смазочное масло и/или охлаждающая жидкость.
В предпочтительном примере выполнения рабочим параметром рабочей машины, ограничивающим регулирование скорости движения посредством приоритетного регулятора движения, является эффективность очистки убранной массы очистным устройством рабочей машины. При этом, например, как только датчики потерь очистки распознают, что потери очистки достигают нежелательной области, регулирование скорости движения посредством приоритетного регулятора движения ограничивается таким образом, что она не может быть повышена дальше, и благодаря этому ограничивается количество убранной массы, загружаемой на решета очистного устройства. Повышение потерь очистки здесь является представителем множества ограничивающих состояний эффективности очистки убранной массы очистным устройством.
В предпочтительном примере выполнения рабочим параметром рабочей машины, ограничивающим регулирование скорости движения посредством приоритетного регулятора движения, является эффективность сепарации убранной массы сепарирующим устройством рабочей машины. При этом, например, как только датчики потерь сепарации распознают, что потери сепарации достигают нежелательной области, регулирование скорости движения посредством приоритетного регулятора движения ограничивается таким образом, что она не может быть повышена дальше, и благодаря этому ограничивается количество убранной массы, загружаемой в сепарирующее устройство. Повышение потерь сепарации здесь является представителем множества ограничивающих состояний эффективности сепарации убранной массы сепарирующим устройством.
В предпочтительном примере выполнения рабочим параметром рабочей машины, ограничивающим регулирование скорости движения посредством приоритетного регулятора движения, является процесс перегрузки убранной массы на внешнее транспортное средство. Для предотвращения потерь в процессе перегрузки убранной массы на внешнее транспортное средство важно, чтобы рабочая машина и транспортное средство двигались примерно с одинаковой скоростью для целенаправленной перегрузки убранной массы. Поскольку теперь скорость движения ограничена в течение процесса перегрузки, приоритетный регулятор движения не может осуществлять регулирование скорости движения, например, в зависимости от наличия растительности, так что регулирование ограничивается процессом перегрузки.
В предпочтительном примере выполнения рабочим параметром рабочей машины, ограничивающим регулирование скорости движения посредством приоритетного регулятора движения, является воспринимаемое рабочей машиной удаление от конца или начала полосы прохода или поля. При этом при восприятии рабочей машиной малого удаления от конца или начала полосы прохода или поля регулирование скорости движения посредством приоритетного регулятора движения ограничивается таким образом, что, например, перед въездом на поле или на полосу прохода скорость движения не повышается резко приоритетным регулятором движения, чтобы в начале поля или полосы прохода не нужно было резко тормозить рабочую машину. Кроме того, например, вблизи конца поля или полосы прохода даже при небольшом увеличении количества убранной массы скорость движения замедляется, поскольку иначе это приводило бы к излишнему разгону рабочей машины на конце поля или полосы прохода. Таким образом, воспринимаемое удаление ограничивает регулирование скорости движения посредством приоритетного регулятора движения.
В предпочтительном примере выполнения параметром убранной массы, ограничивающим регулирование скорости движения посредством приоритетного регулятора движения, является расход убранной массы, подаваемой к рабочим органам рабочей машины. За счет этого, например, при достижении установленного максимального количества убранной массы приоритетный регулятор движения не повышает дальше скорость движения рабочей машины, хотя для этого, например, имеются резервы мощности двигателя. Таким образом, расход убранной массы ограничивает регулирование скорости движения.
В предпочтительном примере выполнения параметром убранной массы, ограничивающим регулирование скорости движения посредством приоритетного регулятора движения, является содержание зерна в убранной массе, находящейся в устройстве возврата на обработку рабочей машины. За счет этого, например, при повышении содержания зерна в убранной массе в устройстве возврата на обработку за установленный предел регулирования скорость движения дальше не повышается приоритетным регулятором движения, чтобы предотвратить дельнейшее повышение содержания зерна в убранной массе в устройстве возврата на обработку.
В предпочтительном примере выполнения параметром убранной массы, ограничивающим регулирование скорости движения посредством приоритетного регулятора движения, является объем убранной массы, находящейся в устройстве возврата на обработку рабочей машины. За счет этого, например, при повышении объема убранной массы в устройстве возврата на обработку за установленный предел регулирования скорость движения дальше не повышается приоритетным регулятором движения, чтобы предотвратить дельнейшее повышение объема убранной массы в устройстве возврата на обработку.
В предпочтительном примере выполнения регулирование скорости движения посредством приоритетного регулятора движения всегда автоматически настраивается на предел регулирования ограничивающего параметра убранной массы и/или рабочего параметра рабочей машины. Это означает, что приоритетный регулятор движения, несмотря на ограничение на основании параметра убранной массы и/или рабочего параметра рабочей машины, постоянно автоматически пытается настроить скорость движения на заданную скорость движения, определенную или установленную приоритетным регулятором движения. При этом приоритетный регулятор движения постоянно ведет скорость движения «вдоль» предела регулирования, обусловленного ограничением. Так, например, если ограничивающим параметром является нагрузка на решета очистного устройства, как только эта ограничивающая нагрузка незначительно улучшается, приоритетный регулятор движения пытается снова повысить скорость движения. Таким образом, скорость движения всегда регулируется в соответствии с фактической нагрузкой на решета очистного устройства. Данный пример является представителем множества пределов регулирования, которые приоритетный регулятор движения учитывает в качестве величин регулирования при регулировании скорости движения.
В предпочтительном примере осуществления самоходная сельскохозяйственная рабочая машина выполнена в виде зерноуборочного комбайна.
Краткий перечень чертежей
Далее со ссылками на прилагаемые чертежи будут подробно описаны примеры осуществления изобретения. На чертежах:
фиг.1 изображает на виде сбоку рабочую машину, выполненную в виде зерноуборочного комбайна,
фиг.2 изображает отображение на дисплее устройства отображения в первом примере выполнения,
фиг.3 изображает отображение на дисплее устройства отображения во втором примере выполнения.
Осуществление изобретения
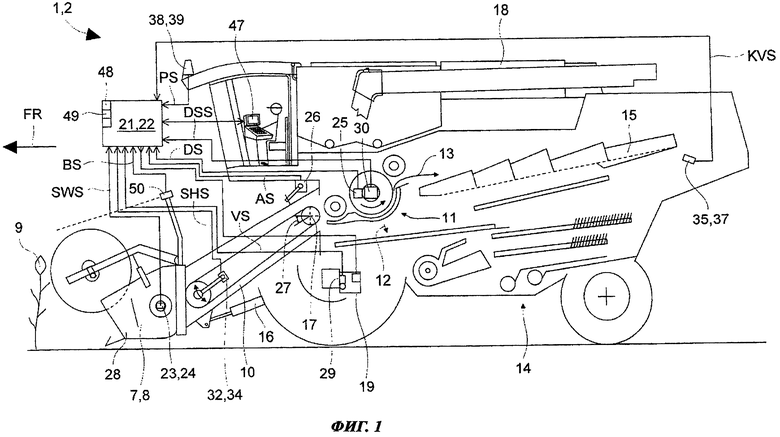
Показанная на фиг.1 выполненная в виде зерноуборочного комбайна 1 самоходная сельскохозяйственная рабочая машина 2 оснащена передним навесным аппаратом 8 в виде жатвенного аппарата 7, который срезает растущую на поле убираемую массу 9 и подает ее к наклонному питателю 10. Наклонный питатель 10 передает убранную массу 9 на расположенный позади него молотильный аппарат 11, который обрабатывает убранную массу 9 и разделяет ее на смесь 12 зерна с половой и поток 13 убранной массы, состоящий из обмолоченной соломы. Смесь 12 зерна с половой транспортируется к очистному устройству 14, которое отделяет зерно от не содержащих зерна фракций, то есть от соломенной трухи и половы. Поток 13 обмолоченной соломы поступает на сепарирующее устройство в виде клавишного соломотряса 15, который транспортирует поток 13 убранной массы к задней части комбайна и при этом отделяет содержащиеся в нем зерна, соломенную труху и полову, которые также направляются к очистному устройству 14. В рамках изобретения сепарирующее устройство может быть выполнено также в виде осевого ротора. Кроме того, в рамках изобретения молотильный аппарат и сепарирующее устройство могут быть выполнены также в виде связанных между собой осевых роторов.
Наклонный питатель 10 соединен с комбайном с помощью подъемного цилиндра 16, который со стороны корпуса шарнирно прикреплен к комбайну 1, а со стороны поршневого штока шарнирно прикреплен к наклонному питателю 10, так что последний может поворачиваться относительно комбайна вокруг оси 17 поворота, поперечной направлению FR движения. Комбайн 1 оснащен двигателем 18 внутреннего сгорания, который обеспечивает привод 19 хода для привода передних колес 20 комбайна 1, привод молотильного аппарата для привода молотильного аппарата 11 и привод жатвенного аппарата для привода жатвенного аппарата 7.
Привод 19 хода оснащен регулятором скорости движения, который получает управляющие сигналы от приоритетного регулятора 21 движения, который полностью автоматически регулирует скорость движения комбайна 1. Приоритетный регулятор 21 движения содержит блок 22 управления и регулирования, связанный с несколькими датчиками 23, 25, 26, 29, 30, 34, 37, 39, 50, расположенными в комбайне 1 и на жатвенном аппарате 7.
На переднем конце жатвенного аппарата 7 расположен датчик 50 растительности, который воспринимает наличие растительности в направлении FR движения перед комбайном 1. В зависимости от наличия растительности на поле датчик 50 растительности генерирует сигналы BS растительности. Следующий датчик 25 контролирует выключатель молотильного аппарата 11 и в зависимости от статуса эксплуатации молотильного аппарата 11 генерирует сигнал DS молотильного аппарата. Следующий датчик 23 контролирует выключатель жатвенного аппарата 7 и в зависимости от статуса эксплуатации жатвенного аппарата 7 генерирует сигнал SWS жатвенного аппарата.
Датчик 26 угла поворота расположен на оси 17 поворота наклонного питателя 10 и известным образом детектирует угол 27 поворота между наклонным питателем 10 и комбайном 1. При определенной величине угла 27 поворота, при которой жатвенный аппарат 7 занимает рабочее положение, датчик 26 угла поворота генерирует сигнал AS рабочего положения.
Для привода 19 хода предназначен датчик 20 числа оборотов, который известным образом детектирует скорость и направление FR движения комбайна 1. Датчик 29 числа оборотов генерирует сигнал VS скорости движения, пропорциональный скорости движения комбайна 1 при переднем ходе.
Датчик 30 расхода расположен известным образом на приводе молотильного аппарата и детектирует крутящий момент молотильного барабана, который зависит от расхода убранной массы через молотильный аппарат 11. Датчик 30 расхода генерирует сигнал DSS, пропорциональный расходу убранной массы через молотильный аппарат 11.
Наклонный питатель 10 оснащен известным устройством 32, детектирующим высоту слоя убранной массы в наклонном питателе 10. Устройство 32 детектирования высоты слоя убранной массы снабжено датчиком 34, который генерирует сигнал SHS высоты слоя, пропорциональный высоте слоя.
На конце клавишного соломотряса 15 расположено устройство 35 измерения зернового потока, которое воспринимает потери сепарации в потоке 13 убранной массы. Устройство 35 содержит несколько датчиков 37 механических ударов, которые известным образом генерируют сигналы KVS зерновых потерь, пропорциональные потерям сепарации.
Дополнительно комбайн оснащен устройством 38 определения положения, которое воспринимает положение комбайна 1. Это устройство содержит датчики 39, генерирующие сигнал PS положения в зависимости местонахождения комбайна 1.
Блок 22 управления и регулирования сравнивает сигналы SHS высоты слоя от датчиков 34 с предварительно заданной минимальной высотой слоя. Если действительная величина высоты слоя равна или больше минимальной высоты слоя, блок 22 управления и регулирования генерирует сигнал рабочего режима, который передается на приоритетный регулятор 21 движения. При получении сигнала рабочего режима приоритетный регулятор 21 движения распознает, что комбайн 1 находится в рабочем режиме. При отсутствии такого сигнала приоритетный регулятор 21 движения распознает, что комбайн 1 находится в холостом режиме.
Для повышения качества распознавания возможен вариант осуществления, в котором приоритетный регулятор 21 движения, например, распознает рабочий режим и холостой режим только после передачи на него других сигналов режима.
Блок 22 управления и регулирования сравнивает сигналы DS молотильного аппарата от датчика 25 с предварительно заданной величиной включения и определяет состояние эксплуатации молотильного аппарата 11. Если молотильный аппарат 11 включен, блок 22 управления и регулирования генерирует первый сигнал рабочего режима.
Возможен вариант осуществления, в котором блок 22 управления и регулирования сравнивает получаемый от датчика 23 сигнал SWS жатвенного аппарата с величиной включения для жатвенного аппарата 7 и определяет состояние эксплуатации жатвенного аппарата 7. Если жатвенный аппарат 7 включен, блок 22 управления и регулирования генерирует второй сигнал рабочего режима.
Возможен вариант осуществления, в котором блок 22 управления и регулирования сравнивает получаемый от датчика 26 угла поворота сигнал AS рабочего положения с предварительно заданной величиной рабочего положения и за счет этого определяет рабочее положение 28 жатвенного аппарата 7. Если жатвенный аппарат 7 находится в рабочем положении 28, блок 22 управления и регулирования генерирует третий сигнал рабочего режима.
Далее, возможен вариант осуществления, в котором блок 22 управления и регулирования сравнивает получаемые от датчика 29 числа оборотов сигналы VS скорости движения с заданной величиной скорости движения и распознает, движется ли комбайн 1 с минимальной скоростью движения. Если скорость движения комбайна 1 равна или больше минимальной скорости движения, блок 22 управления и регулирования генерирует четвертый сигнал рабочего режима.
В следующем примере осуществления возможно, что приоритетный регулятор 21 движения через посредство блока 22 управления и регулирования связан с датчиком 50 растительности и в зависимости от генерируемых датчиком 50 растительности сигналов BS растительности распознает, движется ли комбайн 1 среди растительности или за ее пределами, то есть находится ли комбайн в рабочем или холостом режиме эксплуатации.
Возможен далее вариант осуществления, в котором приоритетный регулятор 21 движения связан с устройством 38 определения положения. При этом приоритетный регулятор 21 движения в зависимости от уже пройденного пути, а также ширины захвата жатвенного аппарата 7 и карты участка распознает, находится ли комбайн в рабочем или холостом режиме эксплуатации.
Когда приоритетный регулятор 21 движения распознает, что комбайн 1 находится в рабочем режиме эксплуатации, далее он регулирует скорость движения в зависимости параметров убранной массы, например, таких как потери сепарации, определяемые устройством 35 измерения зернового потока, и/или рабочих параметров комбайна 1, например, таких как высота слоя убранной массы в наклонном питателе 10.
С помощью блоков 22, 47 управления, обслуживания и отображения, связанных с приоритетным регулятором 21 движения, водитель задает предел 48 зерновых потерь, по которой приоритетный регулятор 21 движения вычисляет заданную высоту слоя убранной массы для наклонного питателя 10. Приоритетный регулятор 21 движения регулирует скорость движения таким образом, чтобы высота слоя достигла расчетной заданной высоты 49 слоя. Приоритетный регулятор 21 движения сравнивает потери сепарации с пределом 48 зерновых потерь. Если потери сепарации в течение определенного промежутка времени превышают предел 48 зерновых потерь, скорость движения снижается до тех пор, пока потери сепарации не сравняются с пределом 48 зерновых потерь, и одновременно при этом устанавливается новая заданная высота 49 слоя. Если потери сепарации в течение определенного промежутка времени остаются меньше предела 48 зерновых потерь, скорость движения повышается до тех пор, пока потери сепарации не сравняются с пределом 48 зерновых потерь. В процессе эксплуатации приоритетный регулятор 21 непрерывно актуализирует высоту слоя убранной массы путем изменения скорости движения для адаптации к различным условиям уборки.
Однако описанное автоматическое регулирование скорости движения посредством приоритетного регулятора 21 движения с целью регулирования расхода убранной массы в комбайне 1 ограничено различными параметрами убранной массы и/или рабочими параметрами машины. Поэтому для оператора в блоке 47 отображения, связанном с блоком 22 управления и регулирования, отображаются ограничивающие элементы, или ограничивающие параметры настройки, или ограничивающие параметры убранной массы, так что он посредством блоков 22, 47 управления, обслуживания и отображения может предпринять соответствующие изменения в настройке комбайна 1.
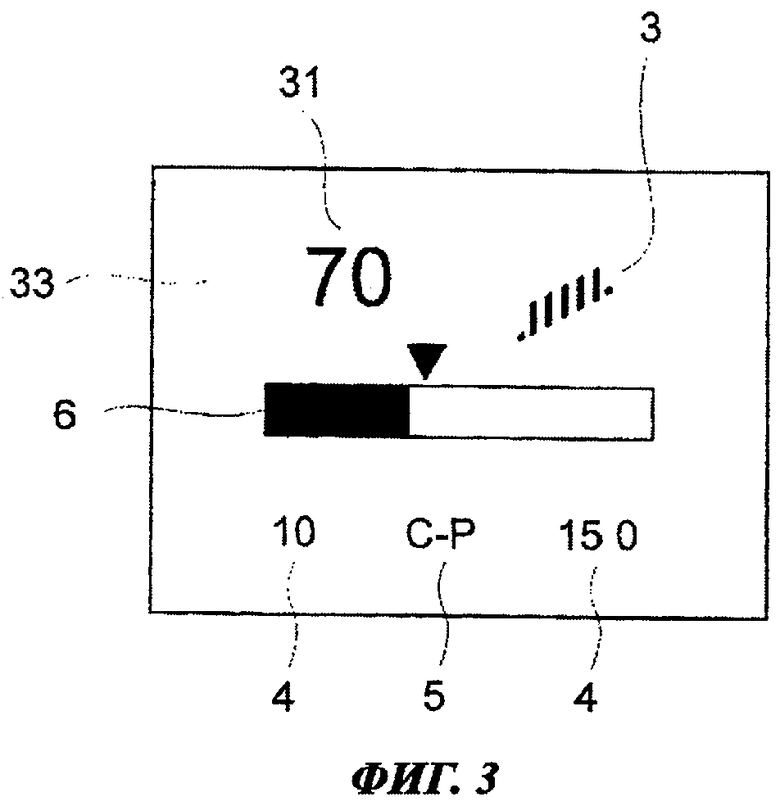
На фиг.2 показан пример отображения на дисплее 46 блока 47 отображения в случае осуществляемого ограничения автоматического регулирования скорости движения посредством приоритетного регулятора движения на основании рабочих параметров комбайна 1. Основное поле 45 отображения подразделено на несколько областей 42, 43, 44, на которых для оператора отображаются наиболее важные данные во время рабочего процесса и холостого хода. Это отображение данных может осуществляться как на основе графических элементов отображения, так и на основе числовых величин 40.
В верхней области дисплея 46 показаны функциональные окна 36. В них заложены параметры машины и/или убранной массы, которые не должны одновременно присутствовать на основном поле 45 отображения, а могут быть вызваны с помощью меню и субменю. В этих окнах 36 предпочтительно могут быть собраны сводные рабочие параметры машины и/или параметры убранной массы. Оператор может свободно выбирать отдельные функциональные окна 36 для загрузки рабочими параметрами и/или параметрами убранной массы. В данном примере выполнения функциональные окна 36 могут быть адаптированы к потребностям и представляют характерные рабочие параметры и характерные параметры убранной массы для комбайна 1 в процессе уборки.
В том случае, когда регулирование скорости движения посредством приоритетного регулятора движения ограничиваются параметрами убранной массы и/или рабочими параметрами, для оператора либо автоматически, либо по его соответствующему выбору отображается дополнительное окно 33 экрана, временно и частично перекрывающее основное поле 45 отображения. В окне 33 экрана для оператора отображается установленный им предел регулирования для максимальной скорости движения при рабочем процессе в качестве заданной величины 31 и стрелки на соответствующем месте полосы 6, представляющей действительную величину скорости движения. Дополнительно у концов полосы 6 указаны возможные минимальный и максимальный определяемые или устанавливаемые пределы 4 регулирования, а также фактический режим 5 движения, в соответствии с которым действует приоритетный регулятор движения. Показанный здесь знак "km/h" обозначает режим 5 движения "Tempomat", при котором скорость движения регулируется посредством приоритетного регулятора движения в зависимости от скорости движения. Альтернативно знак для режима 5 движения может быть представлен в виде пиктограммы. Поскольку в показанном примере действительная скорость на полосе 6 меньше заданной величины 31 скорости движения, оператор получает информацию о том, что автоматическое регулирование скорости движения ограничено приоритетным регулятором движения.
Для предоставления оператору дополнительной информации о том, кокой параметр убранной массы и/или рабочий параметр комбайна действует ограничительным образом, на дополнительном поле 33 экрана имеется соответствующая пиктограмма 3. Альтернативно или дополнительно пиктограмма 3 может отображаться в любой другой области дисплея 46. В данном примере для оператора отображается пиктограмма 3 ограничения регулирования скорости движения на основе рабочего параметра «защита двигателя». Защита двигателя может означать, например, что вследствие различных пограничных условий используемая для охлаждения двигателя 18 внутреннего сгорания охлаждающая жидкость имеет высокую температуру, что может создавать угрозу эффективному охлаждению двигателя. Для защиты двигателя 18 от перегрева скорость движения снижена, чтобы понизить нагрузку на двигатель 18 и его систему охлаждения, пока охлаждающая жидкость не примет снова температуру, обеспечивающую эффективное охлаждение двигателя 18 внутреннего сгорания. Приведенный пример представляет множество возможных условий эксплуатации, которые могут активизировать рабочий параметр «защита двигателя» и связанное с ним ограничение скорости движения посредством приоритетного регулятора движения. Поскольку теперь оператор на основе пиктограммы 3 знает, что рабочий параметр «защита двигателя» ограничивает регулирование скорости движения, он может целенаправленно оказать противодействие этому ограничению без необходимости настройки других параметров убранной массы и/или рабочих параметров. Оператор может оказать воздействие на ограничение на основе рабочего параметра «защита двигателя», например, тем, что повышает число оборотов охлаждающего вентилятора системы охлаждения и/или при низком уровне охлаждающей жидкости увеличить ее количество для обеспечения эффективного охлаждения двигателя внутреннего сгорания. За счет такого целенаправленного воздействия оператора рабочий параметр ограничительного воздействия регулируется таким образом, что перестает ограничиваться автоматическое регулирование скорости движения посредством приоритетного регулятора 21 движения.
Далее, под параметром «защита двигателя» может подразумеваться, например, защита двигателя от остановки вследствие перегрузки. Под перегрузкой двигателя имеется в виду, что из-за высокой нагрузки падает число оборотов двигателя 18 внутреннего сгорания. Когда при нагрузке комбайна 1 нагрузка на двигатель становится настолько высокой, что возникает опасность остановки двигателя, приоритетный регулятор 21 движения учитывает ограничительный параметр путем снижения скорости движения. В этом случае для оператора также отображается пиктограмма 3 ограничивающего параметра «защита двигателя». Поскольку теперь оператор на основе пиктограммы 3 знает, что рабочий параметр «защита двигателя» ограничивает регулирование скорости движения, он может целенаправленно оказать противодействие этому ограничению без необходимости настройки других параметров убранной массы и/или рабочих параметров.
Описанный в данном примере осуществления рабочий параметр «защита двигателя» является представителем множества возможных параметров убранной массы и/или рабочих параметров, которые могут ограничивать автоматическое регулирование скорости движения посредством приоритетного регулятора движения.
На фиг.3 показано во втором примере выполнения дополнительное окно 33 экрана, показанное на фиг.2. В окне 33 для оператора отображается установленный им предел регулирования для максимальной высоты слоя убранной массы в наклонном питателе комбайна в качество заданной величины 31 и стрелки на соответствующем месте полосы 6, представляющей действительную величину. Дополнительно у концов полосы 6 указаны возможные минимальный и максимальный определяемые пределы 4 регулирования, а также фактический режим 5 движения, в соответствии с которым действует приоритетный регулятор движения. Показанный здесь знак "С-Р" обозначает режим 5 движения «расход», при котором скорость движения регулируется, посредством приоритетного регулятора движения в зависимости от расхода убранной массы. Расход убранной массы определяется высотой слоя убранной массы в наклонном питателе. Поскольку в показанном примере на полосе 6 действительная высота слоя меньше заданной величины 31 высоты слоя, оператор получает информацию о том, что автоматическое регулирование скорости движения ограничено приоритетным регулятором движения. В ином случае приоритетный регулятор движения повысил бы скорость движения, пока действительная высота слоя не сравнялась бы с заданной величиной 31 высоты слоя.
Для предоставления оператору дополнительной информации о том, кокой параметр убранной массы и/или рабочий параметр комбайна действует ограничительным образом, на дополнительном поле 33 экрана имеется соответствующая пиктограмма 3. В данном примере для оператора отображается пиктограмма 3 ограничения регулирования скорости движения на основе рабочего параметра «потери на решетах». Потери на решетах означают, например, что достигнут установленный оператором предел регулирования для потерь на решетах, то есть количества зерна, которое сходит с очистного устройства комбайна и остается на поле. Поскольку предел регулирования достигнут уже при пониженном расходе убранной массы, то есть при пониженной высоте слоя в наклонном питателе, приоритетный регулятор движения ограничен тем, что не повышает дальше скорость движения, что привело бы к дальнейшему повышению расхода и высоты слоя в наклонном питателе и в конечном счете к еще большему повышению потерь на решетах. Поскольку теперь оператор на основе пиктограммы 3 знает, что рабочий параметр «потери на решетах» ограничивает регулирование скорости движения, он может целенаправленно оказать противодействие этому ограничению без необходимости настройки других параметров убранной массы и/или рабочих параметров. Оператор может воздействовать на ограничение на основе рабочего параметра «потери на решетах», например, тем, что снижает число оборотов очистного вентилятора, и/или увеличивает размер проходов между пластинами решет очистного устройства, и/или изменяет предел регулирования для потерь решет. За счет целенаправленного вмешательства оператора производится настройка ограничивающего рабочего параметра и устраняется ограничение автоматического регулирования скорости движения посредством приоритетного регулятора движения.
Описанный в данном примере осуществления рабочий параметр «потери на решетах» является представителем множества возможных параметров убранной массы и/или рабочих параметров, которые могут ограничивать автоматическое регулирование скорости движения посредством приоритетного регулятора движения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ РАБОЧАЯ МАШИНА С УСТРОЙСТВОМ ОТОБРАЖЕНИЯ | 2014 |
|
RU2664316C2 |
| СПОСОБ УПРАВЛЕНИЯ РАБОЧЕЙ СЕЛЬХОЗМАШИНОЙ | 2008 |
|
RU2482654C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ МАШИНА | 2005 |
|
RU2389171C2 |
| CИСТЕМА ПОМОЩИ ДЛЯ ВОДИТЕЛЯ СЕЛЬСКОХОЗЯЙСТВЕННОЙ РАБОЧЕЙ МАШИНЫ | 2011 |
|
RU2565225C2 |
| СПОСОБ ЭКСПЛУАТАЦИИ СИСТЕМЫ "АССИСТЕНТ ВОДИТЕЛЯ" ДЛЯ СЕЛЬСКОХОЗЯЙСТВЕННОЙ РАБОЧЕЙ МАШИНЫ | 2014 |
|
RU2566990C9 |
| СПОСОБ ЭКСПЛУАТАЦИИ СИСТЕМЫ "АССИСТЕНТ ВОДИТЕЛЯ" ДЛЯ СЕЛЬСКОХОЗЯЙСТВЕННОЙ РАБОЧЕЙ МАШИНЫ | 2014 |
|
RU2566658C9 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПОВЕРХНОСТНОЙ ВЛАЖНОСТИ | 2005 |
|
RU2361385C2 |
| СИСТЕМА "АССИСТЕНТ ВОДИТЕЛЯ" ДЛЯ СЕЛЬСКОХОЗЯЙСТВЕННОЙ РАБОЧЕЙ МАШИНЫ | 2010 |
|
RU2533922C2 |
| СПОСОБ НАСТРОЙКИ, ПО МЕНЬШЕЙ МЕРЕ, ОДНОГО РАБОЧЕГО ОРГАНА САМОХОДНОЙ УБОРОЧНОЙ МАШИНЫ | 2011 |
|
RU2569958C2 |
| САМОХОДНАЯ УБОРОЧНАЯ МАШИНА И СПОСОБ УПРАВЛЕНИЯ САМОХОДНОЙ УБОРОЧНОЙ МАШИНОЙ | 2014 |
|
RU2638189C2 |
Изобретение относится к самоходной сельскохозяйственной рабочей машине. Самоходная сельскохозяйственная рабочая машина содержит рабочие органы с регулируемыми рабочими параметрами и выполнена с возможностью движения. Скорость движения автоматически регулируется в зависимости от, по меньшей мере, одного параметра убранной массы и/или одного рабочего параметра рабочей машины посредством регулятора движения. Также машина содержит, по меньшей мере, блок управления, обслуживания и отображения, с помощью которого могут регулироваться и отображаться параметры убранной массы и/или рабочие параметры рабочей машины. Для оператора рабочей машины в блоке управления, обслуживания и отображения отображается непосредственно параметр убранной массы и/или рабочий параметр рабочей машины, который ограничивает регулирование скорости движения посредством регулятора движения. Решение направлено на обеспечение стабильного движения и надежности рабочей машины. 19 з.п. ф-лы, 3 ил.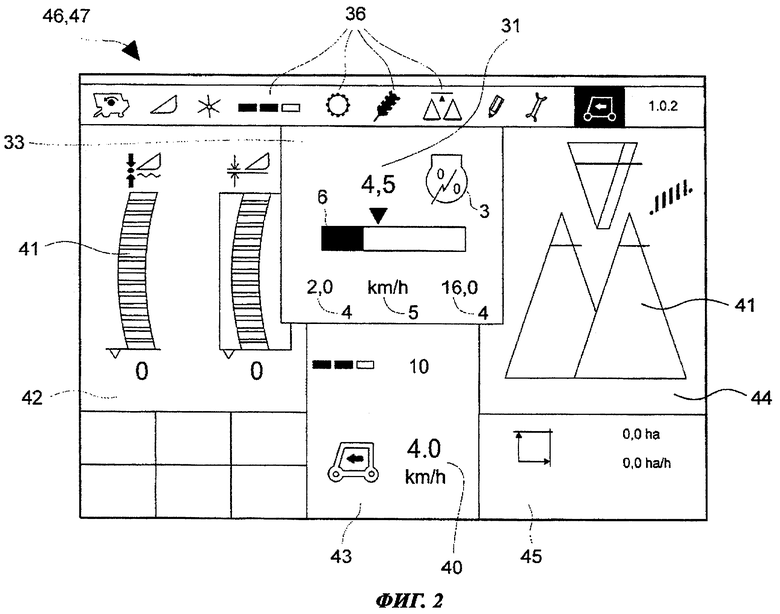
1. Самоходная сельскохозяйственная рабочая машина (2), содержащая рабочие органы с регулируемыми рабочими параметрами и выполненная с возможностью движения со скоростью движения, причем скорость движения автоматически регулируется в зависимости от, по меньшей мере, одного параметра убранной массы и/или одного рабочего параметра рабочей машины (2) посредством приоритетного регулятора (21) движения, а также содержащая, по меньшей мере, блок (22, 47) управления, обслуживания и отображения, с помощью которого могут регулироваться и отображаться параметры убранной массы и/или рабочие параметры рабочей машины (2), отличающаяся тем, что для оператора рабочей машины в блоке (22, 47) управления, обслуживания и отображения отображается непосредственно параметр убранной массы и/или рабочий параметр рабочей машины (2), который фактически ограничивает регулирование скорости движения посредством приоритетного регулятора (21) движения.
2. Самоходная сельскохозяйственная рабочая машина по п.1, отличающаяся тем, что параметр убранной массы и/или рабочий параметр рабочей машины (2), который фактически ограничивает регулирование скорости движения посредством приоритетного регулятора (21) движения, отображается в блоке (22, 47) управления, обслуживания и отображения в виде пиктограммы.
3. Самоходная сельскохозяйственная рабочая машина по п.1, отличающаяся тем, что параметр убранной массы и/или рабочий параметр рабочей машины (2), который фактически ограничивает регулирование скорости движения посредством приоритетного регулятора (21) движения, отображается в блоке (22, 47) управления, обслуживания и отображения в виде обозначения.
4. Самоходная сельскохозяйственная рабочая машина по любому из предыдущих пунктов, отличающаяся тем, что параметр убранной массы и/или рабочий параметр рабочей машины (2), который фактически ограничивает регулирование скорости движения посредством приоритетного регулятора (21) движения, отображается в выделенном окне (33) экрана блока (22, 47) управления, обслуживания и отображения.
5. Самоходная сельскохозяйственная рабочая машина по п.4, отличающаяся тем, что выделенное окно (33) экрана, по меньшей мере, временно и/или частично перекрывает другие окна (45) экрана блока (22, 47) управления, обслуживания и отображения.
6. Самоходная сельскохозяйственная рабочая машина по любому из пп.1-3, отличающаяся тем, что выполнена с возможностью установления для, по меньшей мере, одного параметра убранной массы и/или рабочего параметра рабочей машины, по меньшей мере, нижнего предела регулирования, или верхнего предела регулирования, или нижнего и верхнего пределов регулирования.
7. Самоходная сельскохозяйственная рабочая машина по п.6, отличающаяся тем, что соответствующие пределы регулирования могут быть введены и/или изменены посредством блока (22, 47) управления, обслуживания и отображения.
8. Самоходная сельскохозяйственная рабочая машина по п.6, отличающаяся тем, что для оператора рабочей машины в блоке (22, 47) управления, обслуживания и отображения отображается как параметр убранной массы и/или рабочий параметр рабочей машины (2), который фактически ограничивает регулирование скорости движения посредством приоритетного регулятора (21) движения, так и пределы регулирования, установленные для соответствующего параметра убранной массы и/или рабочего параметра рабочей машины.
9. Самоходная сельскохозяйственная рабочая машина по любому из пп.1-3, отличающаяся тем, что рабочим параметром рабочей машины, ограничивающим регулирование скорости движения посредством приоритетного регулятора (21) движения, является скорость движения.
10. Самоходная сельскохозяйственная рабочая машина по любому из пп.1-3, отличающаяся тем, что рабочим параметром рабочей машины, ограничивающим регулирование скорости движения посредством приоритетного регулятора (21) движения, является нагрузка двигателя.
11. Самоходная сельскохозяйственная рабочая машина по любому из пп.1 -3, отличающаяся тем, что рабочим параметром рабочей машины, ограничивающим регулирование скорости движения посредством приоритетного регулятора (21) движения, является состояние одного или нескольких рабочих аппаратов и/или их рабочих сред.
12. Самоходная сельскохозяйственная рабочая машина по любому из пп.1-3, отличающаяся тем, что рабочим параметром рабочей машины, ограничивающим регулирование скорости движения посредством приоритетного регулятора (21) движения, является эффективность очистки убранной массы очистным устройством (14) рабочей машины (2).
13. Самоходная сельскохозяйственная рабочая машина по любому из пп.1-3, отличающаяся тем, что рабочим параметром рабочей машины, ограничивающим регулирование скорости движения посредством приоритетного регулятора (21) движения, является эффективность сепарации убранной массы сепарирующим устройством рабочей машины (2).
14. Самоходная сельскохозяйственная рабочая машина по любому из пп.1-3, отличающаяся тем, что рабочим параметром рабочей машины, ограничивающим регулирование скорости движения посредством приоритетного регулятора (21) движения, является процесс перегрузки убранной массы на внешнее транспортное средство.
15. Самоходная сельскохозяйственная рабочая машина по любому из пп.1-3, отличающаяся тем, что рабочим параметром рабочей машины, ограничивающим регулирование скорости движения посредством приоритетного регулятора (21) движения, является воспринимаемое рабочей машиной (2) удаление от конца или начала полосы прохода или поля.
16. Самоходная сельскохозяйственная рабочая машина по любому из пп.1-3, отличающаяся тем, что параметром убранной массы, ограничивающим регулирование скорости движения посредством приоритетного регулятора (21) движения, является расход убранной массы, подаваемой к рабочим органам рабочей машины (2).
17. Самоходная сельскохозяйственная рабочая машина по любому из пп.1-3, отличающаяся тем, что параметром убранной массы, ограничивающим регулирование скорости движения посредством приоритетного регулятора (21) движения, является содержание зерна в убранной массе, находящейся в устройстве возврата на обработку рабочей машины (2).
18. Самоходная сельскохозяйственная рабочая машина по любому из пп.1-3, отличающаяся тем, что параметром убранной массы, ограничивающим регулирование скорости движения посредством приоритетного регулятора (21) движения, является объем убранной массы, находящейся в устройстве возврата на обработку рабочей машины (2).
19. Самоходная сельскохозяйственная рабочая машина по п.6, отличающаяся тем, что регулирование скорости движения посредством приоритетного регулятора (21) движения всегда автоматически настраивается на предел регулирования ограничивающего параметра убранной массы и/или рабочего параметра рабочей машины (2).
20. Самоходная сельскохозяйственная рабочая машина по любому из пп.1-3, 5, 7, 8, отличающаяся тем, что рабочей машиной (2) является зерноуборочный комбайн (1).
| DE 102004059543 A1, 29.06.2006 | |||
| JP 2007295932 A, 15.11.2007 | |||
| US 2007149265 A1, 28.06.2007 | |||
| ГАЗОВЫЙ ЛАЗЕР С ЗАМКНУТОЙ СИСТЕМОЙ ЦИРКУЛЯЦИИ ГАЗА | 1982 |
|
SU1769667A1 |
| СЕЛЬСКОХОЗЯЙСТВЕННОЕ НЕСУЩЕЕ ТРАНСПОРТНОЕ СРЕДСТВО | 1990 |
|
RU2037284C1 |

