Изобретение относится к полигонным испытаниям и может быть использовано для определения влияния условий стрельбы на характеристики рассеивания снарядов.
Известен способ для измерения скорости метаемого тела, заключающийся в измерении временного интервала при пролете метаемого тела относительно двух пространственно разнесенных неконтактных датчиков, формировании измерительного поля неконтактных датчиков в виде двухмерной лазерной сетки, на основе изготовление конструкции неконтактных датчиков в виде двух перпендикулярно расположенных линеек излучателей и фотоприемников, определении координат пролета метаемого тела, на основе фиксации комбинации сработавших элементов фотоприемников, выдачи информации о скорости метаемого тела и координат его пролета относительно первого и второго датчиков (Ефанов В.В., Мужичек С.М., патент РФ на изобретение №2285267 от 10.10.2006 г.).
Известно устройство для измерения скорости метаемого тела, которое содержит два разнесенных датчика, первый и второй измерительные приборы, связанный с выходами датчиков, первый, второй, третий, четвертый элемент ИЛИ, первый и второй блок логики, а каждый из датчиков выполнен в виде двух перпендикулярно расположенных линеек излучающих диодов и линеек фотоприемников, причем выходы горизонтально расположенной линейки фотоприемников первого датчика соединены одновременно с входами первого элемента ИЛИ и первыми входами первого блока логики, выходы вертикально расположенной линейки фотоприемников первого датчика соединены одновременно с входами второго элемента ИЛИ и вторыми входами первого блока логики, выходы горизонтально расположенной линейки фотоприемников второго датчика соединены одновременно с входами третьего элемента ИЛИ и первыми входами второго блока логики, выходы вертикально расположенной линейки фотоприемников второго датчика соединены одновременно с входами четвертого элемента ИЛИ и вторыми входами второго блока логики, выход первого и второго элемента ИЛИ соединены соответственно с первыми входами первого и второго измерительных приборов, выходы третьего и четвертого элемента ИЛИ соединены соответственно со вторыми входами первого и второго измерительных приборов, выход источника питания соединен с линейками излучающих диодов, блок логики состоит из матрицы элементов И, из матрицы триггеров, блока индикации, причем первые входы матрицы элементов И соединены с первыми входами блока логики, а вторые входы соединены со вторыми входами блока логики, а выходы элементов И соединены с входами триггеров, выходы которых соединены с блоком индикации (Ефанов В.В., Мужичек С.М., патент РФ на изобретение №2285267 от 10.10.2006 г.).
Недостатком данных способа и устройства является невозможность определения влияния условий стрельбы на характеристики рассеивания снарядов. Одним из важнейших факторов, определяющих случайный характер ущерба, наносимого стрельбой цели, является рассеивания средств поражения - снарядов, бомб, ракет, торпед и др. Рассеиванием называется случайное отклонение относительной траектории снаряда от расчетной точки. Обычно в качестве расчетной точки рассматривается центр цели. Рассеивание имеет место при любом виде стрельбы и вызывается различными ошибками, сопровождающими прицеливание и стрельбу.
Источников ошибок стрельбы, вызывающих рассеивание снарядов, существует много. Наибольший удельный вес в суммарном рассеивании имеют ошибки стрельбы, связанные с прицеливанием и наведением снаряда в точку встречи с целью. Точное положение точки встречи в пространстве описывается сложной системой уравнений. Для решения их на борту ЛА имеются информационная система, получающая необходимую информацию, бортовая ЭВМ, которая обрабатывает полученную информацию, решает систему уравнений и передает соответствующие сигналы на исполнительные органы, реализующие управляющие команды. Ошибки в измерении параметров цели, в упрощении алгоритмов прицеливания приводят к ошибкам стрельбы и называются соответственно информационными и методическими ошибками. Ошибки стрельбы, вызывающие случайные условия отделения средств поражения от орудия или летательного аппарата, которые определяются индивидуальными конструктивными особенностями подвески его на ЛА и колебаниями установки под влиянием сил отдачи при стрельбе из автоматического оружия, называются техническими ошибками (Калабухова Е.П. Основы теории эффективности воздушной стрельбы и бомбометания: Учебник для студентов вузов. М.: изд. Машиностроение, 1991 г., - 332 с.).
При этом технические ошибки являются одним из основных факторов, влияющих на рассеивания снарядов.
Технической задачей изобретения является повышение информативности за счет определения влияния условий стрельбы на характеристики рассеивания снарядов.
Решение технической задачи достигается тем, что в способе определения характеристик рассеивания снарядов, заключающемся в измерении скоростей снарядов, на основе фиксации временных интервалов при пролете снарядов двух разнесенных между собой неконтактных датчиков, формировании измерительного поля неконтактных датчиков в виде двухмерной лазерной сетки, на основе изготовление конструкции неконтактных датчиков в виде двух перпендикулярно расположенных линеек излучателей и фотоприемников, определении координат пролета снарядов, на основе фиксации комбинации сработавших элементов фотоприемников, дополнительно определяют вибрацию лафета артиллерийской установки, определяют координаты попадания снарядов в мишень на основе фиксации сработавших элементов линеек фотоприемников, определяют математическое ожидание центра рассеивания снарядов в виде выражений

где Np - количество выстрелов, ZK Уk - координаты попадания снаряда при одном выстреле,
определяют средние квадратичные отклонения в виде выражений:

осуществляют запись данных о результатах испытаний в блок памяти, осуществляют передачу данных на микроЭВМ, фиксируют изменения координат снаряда относительно первого и второго датчиков и на этой основе прогнозируют координаты попадания снаряда в мишень в виде выражений:
где x1, y1, x2, y2 - координаты пролета снаряда относительно первого и второго датчиков, 
Решение технической задачи достигается тем, что в информационно-вычислительную систему для определения характеристик рассеивания снарядов при стрельбе из артиллерийского оружия, содержащую два разнесенных в пространстве неконтактных датчика, блок определения параметров движения снарядов, который содержит первый и второй измерительные приборы, связанные с выходами датчиков, первый, второй, третий, четвертый элементы ИЛИ, первый и второй блоки логики, каждый из неконтактных датчиков выполнен в виде двух перпендикулярно расположенных линеек излучающих диодов и линеек фотоприемников, причем выходы горизонтально расположенной линейки фотоприемников первого датчика соединены одновременно с входами первого элемента ИЛИ и первыми входами первого блока логики, выходы вертикально расположенной линейки фотоприемников первого датчика соединены одновременно с входами второго элемента ИЛИ и вторыми входами первого блока логики, выходы горизонтально расположенной линейки фотоприемников второго датчика соединены одновременно с входами третьего элемента ИЛИ и первыми входами второго блока логики, выходы вертикально расположенной линейки фотоприемников второго датчика соединены одновременно с входами четвертого элемента ИЛИ и вторыми входами второго блока логики, выход первого и второго элементов ИЛИ соединены соответственно с первыми входами первого и второго измерительных приборов, выходы третьего и четвертого элементов ИЛИ соединены соответственно со вторыми входами первого и второго измерительных приборов, выход источника питания соединен с линейками излучающих диодов, блок логики состоит из матрицы элементов И, из матрицы триггеров, причем первые входы матрицы элементов И соединены с первыми входами блока логики, а вторые входы соединены со вторыми входами блока логики, а выходы элементов И соединены с первыми входами триггеров, выходы которых являются выходами блока логики, первым, вторым, группой третьих и четвертых выходов блока определения параметров движения снарядов являются соответственно выходы первого и второго измерительных приборов, первого и второго блоков логики, дополнительно введены последовательно соединенные датчик вибрации и блок контроля уровня вибрации, а также электронная мишень, блок обработки сигналов, приемное устройство, блок сопряжения, микроЭВМ, индикатор, а в блок логики дополнительно введена дифференцирующая цепь, при этом датчик вибрации размещен на лафете артиллерийского оружия и обеспечивает контроль работы амортизатора артиллерийского оружия, который содержит корпус амортизатора силы отдачи, внутри которого расположен шток, на котором между регулировочной шайбой и гайкой размещен упругий элемент в виде пружины, причем корпус амортизатора соединен с корпусом артиллерийского оружия специальным наплывом в виде зуба, а с лафетом установки проточкой, которая вырезана в задней части штока, в передней части штока расположена гайка, которая накручивается на шток до совмещения отверстия в штоке и крепится штифтом, подбором толщины шайбы обеспечивается предварительное поджатие пружины, кнопка «Огонь» соединена с входом управления стрельбой артиллерийского оружия, пятым входом блока определения параметров движения снарядов и седьмым входом блока обработки сигналов, при этом данные входы являются третьими входами первого и второго блока логики, входящих в состав блока определения параметров движения цели, и третьими входами блока логики, входящего в состав блока обработки сигналов, третьи входы блоков логики соединены с входами дифференцирующей цепи, выход которой соединен со вторыми входами матрицы триггеров, выход блока контроля уровня вибрации соединен с восьмым входом блока обработки сигналов, блок контроля уровня вибрации содержит последовательно соединенные согласующее устройство, вычислитель и блок памяти, первая и вторая группы выходов электронной мишени, а также первый, второй, группа третьих и четвертых выходов блока определения параметров движения снарядов соединены соответственно с группой первых, вторых, третьим, четвертым, группой пятых и шестых входов блока обработки сигналов, выход которого соединен по бесконтактной линии связи с входом приемного устройства, выход которого через устройство согласования соединен с входом микроЭВМ, выход которой соединен с выходом индикатора, блок обработки сигналов содержит блок логики, блок определения характеристик рассеивания снарядов, блок памяти, передающее устройство, причем группа первых и вторых входов, а также третий, четвертый, группа пятых и шестых входов блока обработки сигналов является соответственно группой первых и вторых входов блока логики, а также третьим, четвертым, группой пятых и шестых входов блока памяти, группа выходов блока логики соединена одновременно с входами блока определения характеристик рассеивания снарядов и группой вторых входов блока памяти, выход блока определения характеристик рассеивания снарядов соединен с первым входом блока памяти, выход которого соединен с входом передающего устройства, выход которого является бесконтактным выходом блока обработки сигналов.
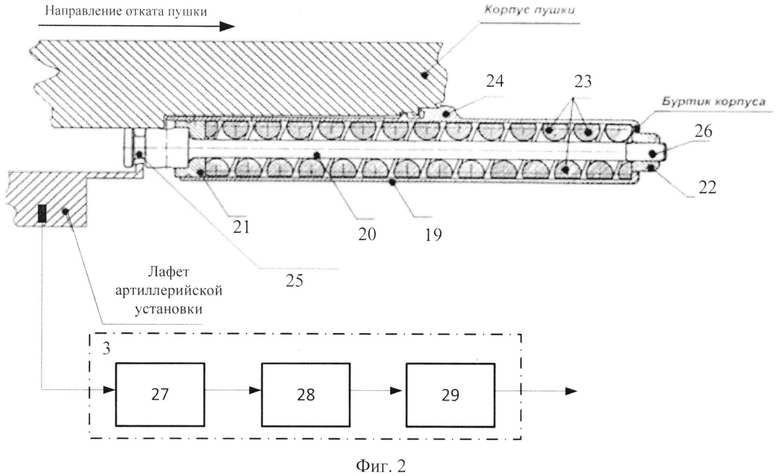
На фиг. 1 приведена структурная схема информационно-вычислительной системы определения характеристик рассеивания снарядов при стрельбе из артиллерийского оружия, на фиг. 2 - конструктивная схема амортизатора и структурная схема определения уровня вибрации артиллерийской установки, на фиг. 3 - схема движения корпуса оружия относительно артиллерийской установки, на фиг. 4 - структурная схема блока определения параметров движения снарядов, на фиг. 5 - структурная схема блока обработки сигналов, на фиг. 6 - структурная схема блока логики.
Информационно-вычислительная система определения характеристик рассеивания снарядов содержит лафет 1, последовательно соединенные датчик 2 вибрации и блок 3 контроля уровня вибрации, артиллерийское оружие 4, на котором закреплен амортизатор 5 силы отдачи, снаряды 6, первый 7 и второй 8 неконтактные датчики, которые разнесены в пространстве, электронную мишень 9, блок 10 определения параметров движения снарядов, блок 11 обработки сигналов, приемное устройство 12, устройство 13 сопряжения, микроЭВМ 14, индикатор 15, конструкция неконтактных датчиков выполнена в виде двух перпендикулярных излучающих диодов 16 и фотоприемников 17, при этом излучающие диоды подсоединены к источнику питания 18.
Амортизатор 5 силы отдачи артиллерийского оружия содержит корпус 19 амортизатора, внутри которого расположен шток 20, на котором между регулировочной шайбой 21 и гайкой 22 размещен упругий элемент в виде пружины 23, причем корпус 19 амортизатора соединен с корпусом артиллерийского оружия специальным наплывом в виде зуба 24, а с лафетом установки проточкой 25, которая вырезана в задней части штока 20, в передней части штока 20 расположена гайка 22, которая накручивается на шток 20 до совмещении отверстия в штоке 20 и крепится штифтом 26, подбором толщины шайбы 21 обеспечивается предварительное поджатие пружины 23.
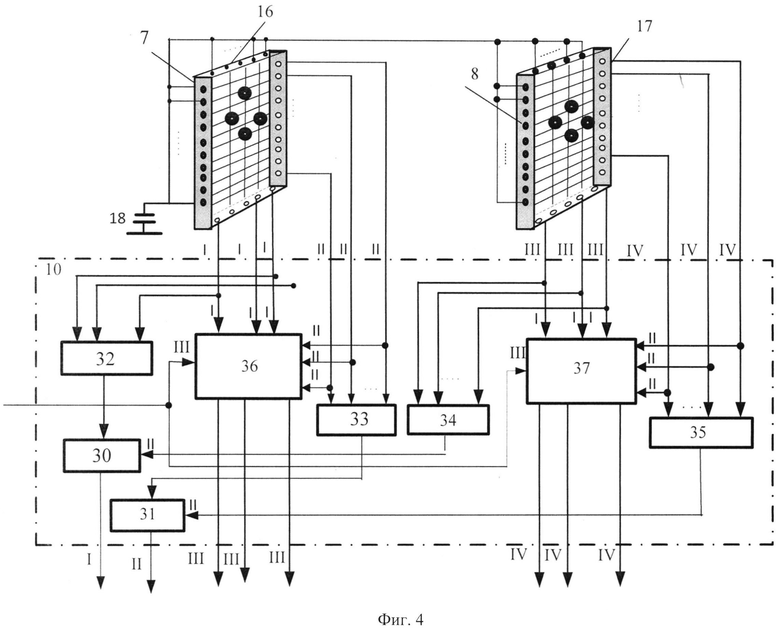
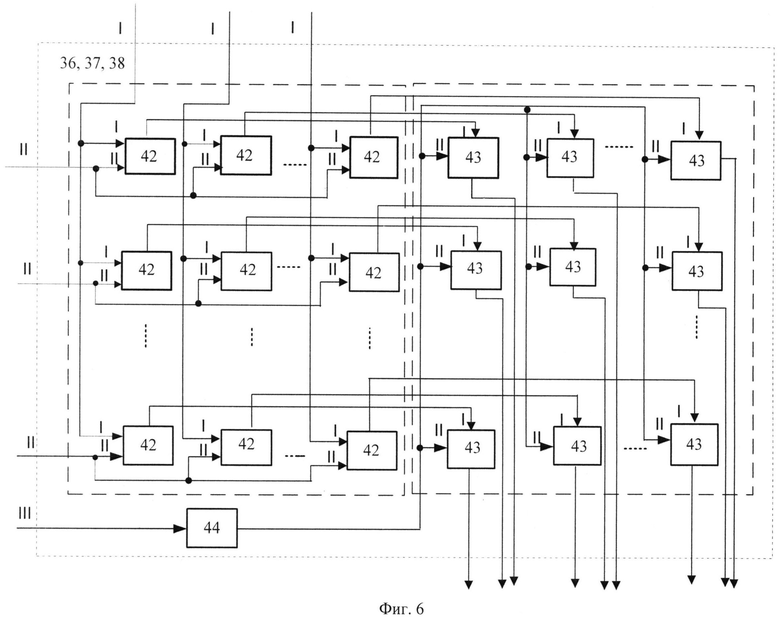
Блок 3 контроля уровня вибрации содержит устройство 27 сопряжения, вычислитель 28, блок 29 памяти. Блок 10 определения параметров движения снарядов содержит первый 30 и второй 31 измерительный прибор, первый 32, второй 33, третий 34, четвертый 35 элемент ИЛИ, первый 36 и второй 37 блок логики. Блок 11 обработки сигналов содержит блок 38 логики, блок 39 определения характеристик рассеивания снарядов, блок 40 памяти, передающее устройство 41. Блоки 36, 37, 38 логики состоят из матриц элементов И 42, из матриц триггеров 43, дифференцирующей цепи 44.
Амортизатор 5 силы отдачи предназначен для снижения силового воздействия оружия на артиллерийскую установку. Амортизатор 5 силы отдачи в процессе стрельбы преобразует кратковременное, но значительное по величине действие сил отдачи в более продолжительное по времени действия, но менее значительную по величине реакцию пружины. Значительные по амплитуде колебания артиллерийского оружия на амортизаторе 5 силы отдачи негативно влияют на точность стрельбы, ухудшают условия подачи патронной ленты в автоматику и, кроме того, могут вызвать преждевременную поломку основного узла крепления оружия на лафете.
Таким образом, в процессе стрельбы необходимо осуществлять мониторинг работы амортизатора 5 как основного источника технических ошибок.
Если закрепить артиллерийское оружие 2 на стационарной артиллерийской установке 1 (лафете) в полигонных условиях и осуществлять стрельбу с постоянным контролем уровня вибраций артиллерийской установки, то можно оценить работу амортизатора 5 и определить зависимость технических ошибок на характеристики рассеивания снарядов.
Описание работы устройства.
Для определения характеристик рассеивания снарядов создается мишенная обстановка в виде двух неконтактных, датчиков (7, 8) и электронной мишени (9), выходы которых соединены соответственно с входами блока 10 определения параметров движения снарядов и блока 11 обработки сигналов (фиг. 1).
Наклеивается на электронную мишень 9 бумага, на которую наносится центр прицеливания в виде перекрестия, в канал ствола вставляется трубка холодной пристрелки (ТХП) и наводятся стволы по центру электронной мишени 9. Затем вынимается ТХП из канала ствола и производится Np опытных стрельб в одинаковых условиях и на выбранной картинной плоскости в виде электронной мишени 9 фиксируются декартовые координаты точек попадания.
В процессе стрельбы корпус оружия, откатываясь под действием силы отдачи, деформирует упругий элемент. В результате к артиллерийской установке (к летательному аппарату) будет приложена не сила отдачи, а реакция (Па упругого элемента, пропорциональная его деформации.
Величина реакции упругого элемента значительно меньше величины силы отдачи, Па<R0 или Па<Рдн.
Пружина в АСО может быть различной конструкции. Чаще используется витая пружина (пушки ГШ-23, ГШ-6-23М, ГШ-6-30А, пулемет ЯкБ-12,7). В амортизаторах пушек ГШ-30, ГШ-30К применяются кольцевые пружины. Возникающая в процессе стрельбы из оружия и приложенная к артиллерийской установке реакция (Па) пружины АСО - называется силой отдачи амортизатора 5. Ее значение определяется главным образом упругими свойствами пружины (Авиационное артиллерийское вооружение, под редакцией Н.А. Лобачева, Издание ВВИА имени профессора Н.Е. Жуковского, 2005 г., стр.182).
В соответствии с законом Гука сила упругости (Fy), возникающая в пружине при сжатии, определяется выражением
Fy=c·x,
где c - коэффициент жесткости пружины, x - величина сжатия пружины.
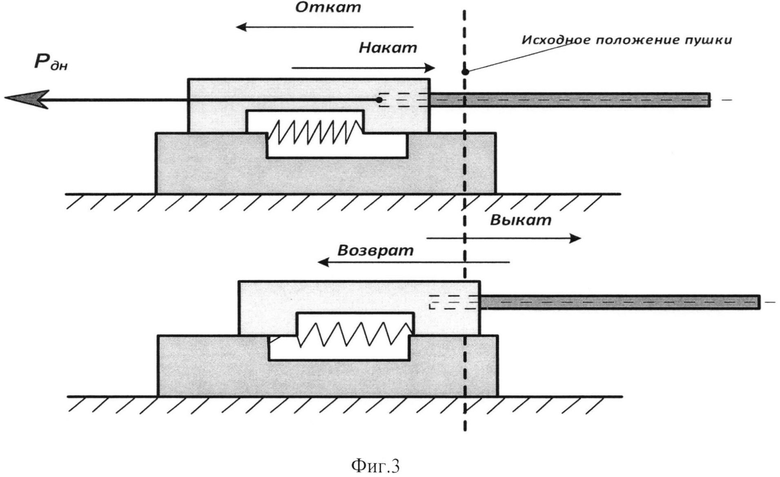
При выстреле, под действием силы Рдн, корпус оружия 4 из исходного положения перемещается относительно артиллерийской установки 1 назад (фиг. 2). Это движение называется откатом. Оно продолжается до момента выравнивания по величине силы Рдн и силы упругости пружины. После того как последняя станет больше, чем Рдн, начнется движение корпуса оружия вперед. Оно называется накатом.
Придя в исходное положение, оружие 4 не останавливается, а под действием силы инерции продолжает движение вперед, которое называется выкатом. Выкат заканчивается, когда сила инерции сравнивается по величине с силой упругости пружины. Под действием последней оружие начинает движение назад, которое называется возвратом.
На практике жесткость пружины АСО подбирается такой, что в процессе очереди выстрелов выкат и возврат не происходят. Они имеют место только по окончании стрельбы.
Пружины во всех АСО имеют предварительное поджатие. Это делается для надежного удержания оружия на артиллерийской установке 1 (летательном аппарате) в исходном, до стрельбы, положении.
В процессе стрельбы сжатие пружины амортизатора 5 происходит между шайбой 21 и гайкой 22. При окончании стрельбы, в процессе выката, сжатие пружины происходит между буртиком корпуса амортизатора и шайбой 21.
Следует отметить, что при сжатии в витой пружине АСО, кроме силы упругости FY, действует еще, вторая по значимости, сила вязкого (линейного) сопротивления. Ее значение пропорционально скорости сжатия пружины:
где в - коэффициент вязкости, 
Наличие силы F является характерной особенностью витых пружин.
Таким образом, значение силы отдачи АСО с витой пружиной определяется как сумма сил

Для контроля коэффициента жесткости и вязкости пружины используется вибрационный датчик 2, который закреплен на лафете 1.
В процессе стрельбы сигналы с выхода датчика вибрации 2 поступают на вход блока 3 контроля уровня вибрации, которое является входом согласующего устройства 27, с выхода которого поступают на вход вычислителя 28, с выхода которого поступают на вход блока памяти, с выхода которого поступают на седьмой вход блока памяти 40.
Вычислитель 33 обеспечивает определение частоты и амплитуды вибрации.
В момент пролета снарядов относительно первого 7 датчика происходит срабатывание определенной комбинации элементов линейки фотоприемников 17 (фиг. 1, фиг. 4). Сигналы с выходов фотоприемников 17, датчика 7 через первые 32 и вторые 33 элементы ИЛИ поступают одновременно на запуск первого 30 и второго 31 измерительных приборов и на первые и вторые входы первого 36 блока логики (фиг. 4).
В момент пролета снаряда относительно второго 8 датчика происходит срабатывание следующей комбинация чувствительных элементов линейки фотоприемников 17 (фиг. 1, фиг. 4). Сигналы с выходов фотоприемников 17, второго 8 датчика через третий 34 и четвертый 35 элементы ИЛИ поступают одновременно на остановку первого 31 и второго 32 измерительных приборов и на первые и вторые входы второго 37 блока логики (фиг. 4).
Таким образом, обеспечивается определение скоростей снарядов на основе измерения временного интервала его движения относительно двух разнесенных в пространстве датчиков.
Код сигнала, поступающий на первые и вторые входы блока 36 логики, соответствует координатам пролета снаряда относительно первого 7 датчика (фиг. 4, фиг. 6) и обеспечивает срабатывания определенной комбинации матрицы элементов И 42, сигналы с выхода которой обеспечивают срабатывания комбинации матрицы триггеров 43, сигналы с выхода которых поступают на пятые группы входов блока 40 памяти (фиг. 6).
Предварительное обнуление матрицы триггеров 43 осуществляется по команде «Огонь», при нажатии кнопки «Огонь» сигнал обнуления поступает на входы дифференцирующей цепи, с выхода которой поступает на вторые входы матрицы триггеров 43 (фиг. 1, фиг. 6).
Аналогично определяются координаты пролета снарядов относительно второго 8 датчика и сигналы с выходов второго 37 блока логики поступают на шестую группу входов блока 40 памяти.
В дальнейшем при движении снарядов они попадают в электронную мишень 9, с первого и второго выходов которой поступают на первый и второй входы блока 11 обработки сигналов (фиг. 4).
Причем группа первых и вторых входов, а также третий, четвертый, группа пятых и шестых входов блока обработки сигналов является соответственно группой первых и вторых входов блока логики, а также третьим, четвертым, группой пятых и шестых входов блока памяти.
Причем на третий и четвертые входы, группу пятых и шестых входов блока 40 памяти поступает соответственно информация о скоростях движения снарядов и координатах их пролета относительно первого 7 и второго 8 датчиков.
С группы выходов блока 38 логики сигналы поступают одновременно на группу вторых входов блока 40 памяти и входы блока 39 определения характеристик рассеивания снарядов (фиг. 4).
На вторые входы блока 40 памяти поступают сигналы, соответствующие координатам попадания снарядов в электронную 9 мишень.
Блок 39 определения характеристик рассеивания снарядов на основе информации о координатах попадания снарядов в электронную мишень и количестве произведенных выстрелов, которые определяются на основе подсчета количества пробоин в электронную мишень, определяет математическое ожидание центра рассеивания снарядов в виде выражений

где Np - количество выстрелов, ZK Уk - координаты попадания снаряда при одном выстреле,
определяет средние квадратичные отклонения в виде выражений:

Блок 40 памяти осуществляют запись данных о результатах испытаний. С выхода блока 40 памяти информация о результатах испытаний через передающее устройство 41 по линии бесконтактной линии связи передается на приемное устройство 12, с выхода которого через устройство 13 согласование поступает на вход микроЭВМ 14.
МикроЭВМ 14 осуществляет прогнозирование координат попадания снарядов в мишень в виде выражений:
где x1, y1, x2, y2 - координаты пролета снаряда относительно первого и второго датчиков, 
Информация о результатах испытаний высвечивается на индикаторе 15. Таким образом, предлагаемое изобретение обеспечивает определения зависимости уровня вибрации артиллерийской установки и скорости движения снарядов на характеристики их рассеивания.
Источники информации
1. Ефанов В.В., Мужичек С.М., патент РФ на изобретение №2285267 от 10.10.2006 г.
2. Калабухова Е.П. Основы теории эффективности воздушной стрельбы и бомбометания: Учебник для студентов вузов. М.: изд. Машиностроение, 1991 г., - 332 с.
3. Авиационное артиллерийское вооружение, под редакцией Н.А. Лобачева, Издание ВВИА имени профессора Н.Е. Жуковского, 2005 г., стр.182.

Изобретение относится к области полигонных испытаний, в частности для определений влияний условий стрельбы на характеристики рассеивания снарядов. Способ определения характеристик рассеивания снарядов заключается в измерении скоростей снарядов, на основе фиксации временных интервалов при пролете снарядов двух разнесенных между собой неконтактных датчиков, формировании измерительного поля неконтактных датчиков в виде двухмерной лазерной сетки, на основе изготовление конструкции неконтактных датчиков в виде двух перпендикулярно расположенных линеек излучателей и фотоприемников, определении координат пролета снарядов, на основе фиксации комбинации сработавших элементов фотоприемников, определении вибрации лафета артиллерийской установки, определении координат попадания снарядов в мишень на основе фиксации сработавших элементов линеек фотоприемников, определении математического ожидания и средних квадратичных отклонений, осуществлении записи данных о результатах испытаний в блок памяти, осуществлении передачи данных на микроЭВМ, прогнозировании координат попаданий снарядов в мишень на основе фиксации координат их пролета относительно датчиков, определении ошибок, связанных с движением снарядов относительно центра масс на основе сравнения координат попаданий, полученных от разных датчиков, определении зависимости характеристик рассеивания снарядов от вибрации лафета и движения снарядов относительно центра масс, осуществлении индикации результатов испытаний. Информационно-вычислительная система для определения характеристик рассеивания снарядов при стрельбе из артиллерийского оружия содержит два разнесенных в пространстве неконтактных датчика, блок определения параметров движения снарядов, датчик вибрации и блок контроля уровня вибрации, а также электронную мишень, блок обработки сигналов, приемное устройство, блок сопряжения, микроЭВМ, индикатор. Изобретение позволяет повысить информативность за счет определения влияния условий стрельбы на характеристики рассеивания снарядов. 2 н.п. ф-лы, 6 ил.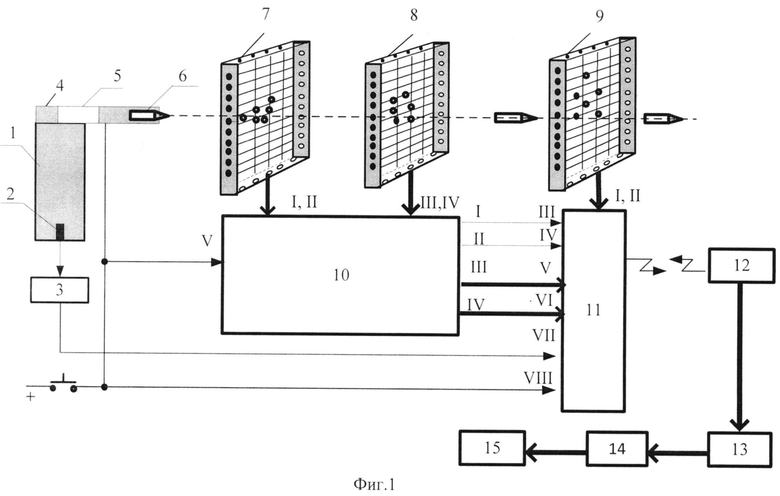
1. Способ определения характеристик рассеивания снарядов, заключающийся в измерении скоростей снарядов, на основе фиксации временных интервалов при пролете снарядов двух разнесенных между собой неконтактных датчиков, формировании измерительного поля неконтактных датчиков в виде двухмерной лазерной сетки, на основе изготовление конструкции неконтактных датчиков в виде двух перпендикулярно расположенных линеек излучателей и фотоприемников, определении координат пролета снарядов, на основе фиксации комбинации сработавших элементов фотоприемников, отличающийся тем, что дополнительно определяют вибрацию лафета артиллерийской установки, определяют координаты попадания снарядов в мишень на основе фиксации сработавших элементов линеек фотоприемников, определяют математическое ожидание центра рассеивания снарядов в виде выражений

где Np - количество выстрелов, ZK Уk - координаты попадания снаряда при одном выстреле,
определяют средние квадратичные отклонения в виде выражений:

осуществляют запись данных о результатах испытаний в блок памяти, осуществляют передачу данных на микроЭВМ, фиксируют изменения координат снаряда относительно первого и второго датчиков и на этой основе прогнозируют координаты попадания снаряда в мишень в виде выражений:
где x1, y1, x2, y2 - координаты пролета снаряда относительно первого и второго датчиков,  - коэффициент, определяющий отношения расстоянии между первым и вторым неконтактным датчиками относительно мишени, определяют ошибки, связанные с движением снаряда относительно центра массы на основе сравнения координат попаданий, полученных от разных датчиков, определяют зависимость характеристик рассеивания снарядов от вибрации лафета и движения снарядов относительно центра масс, осуществляют индикацию результатов испытаний.
- коэффициент, определяющий отношения расстоянии между первым и вторым неконтактным датчиками относительно мишени, определяют ошибки, связанные с движением снаряда относительно центра массы на основе сравнения координат попаданий, полученных от разных датчиков, определяют зависимость характеристик рассеивания снарядов от вибрации лафета и движения снарядов относительно центра масс, осуществляют индикацию результатов испытаний.
2. Информационно-вычислительная система для определения характеристик рассеивания снарядов при стрельбе из артиллерийского оружия содержит два разнесенных в пространстве неконтактных датчика, блок определения параметров движения снарядов, который содержит первый и второй измерительные приборы, связанные с выходами датчиков, первый, второй, третий, четвертый элементы ИЛИ, первый и второй блоки логики, каждый из неконтактных датчиков выполнен в виде двух перпендикулярно расположенных линеек излучающих диодов и линеек фотоприемников, причем выходы горизонтально расположенной линейки фотоприемников первого датчика соединены одновременно с входами первого элемента ИЛИ и первыми входами первого блока логики, выходы вертикально расположенной линейки фотоприемников первого датчика соединены одновременно с входами второго элемента ИЛИ и вторыми входами первого блока логики, выходы горизонтально расположенной линейки фотоприемников второго датчика соединены одновременно с входами третьего элемента ИЛИ и первыми входами второго блока логики, выходы вертикально расположенной линейки фотоприемников второго датчика соединены одновременно с входами четвертого элемента ИЛИ и вторыми входами второго блока логики, выход первого и второго элементов ИЛИ соединены соответственно с первыми входами первого и второго измерительных приборов, выходы третьего и четвертого элементов ИЛИ соединены соответственно со вторыми входами первого и второго измерительных приборов, выход источника питания соединен с линейками излучающих диодов, блок логики состоит из матрицы элементов И, из матрицы триггеров, причем первые входы матрицы элементов И соединены с первыми входами блока логики, а вторые входы соединены со вторыми входами блока логики, а выходы элементов И соединены с первыми входами триггеров, выходы которых являются выходами блока логики, первым, вторым, группой третьих и четвертых выходов блока определения параметров движения снарядов являются соответственно выходы первого и второго измерительных приборов, первого и второго блоков логики, дополнительно введены последовательно соединенные датчик вибрации и блок контроля уровня вибрации, а также электронная мишень, блок обработки сигналов, приемное устройство, блок сопряжения, микроЭВМ, индикатор, а в блок логики дополнительно введена дифференцирующая цепь, при этом датчик вибрации размещен на лафете артиллерийского оружия и обеспечивает контроль работы амортизатора артиллерийского оружия, который содержит корпус амортизатора силы отдачи, внутри которого расположен шток, на котором между регулировочной шайбой и гайкой размещен упругий элемент в виде пружины, причем корпус амортизатора соединен с корпусом артиллерийского оружия специальным наплывом в виде зуба, а с лафетом установки проточкой, которая вырезана в задней части штока, в передней части штока расположена гайка, которая накручивается на шток до совмещения отверстия в штоке и крепится штифтом, подбором толщины шайбы обеспечивается предварительное поджатие пружины, кнопка «Огонь» соединена с входом управления стрельбой артиллерийского оружия, пятым входом блока определения параметров движения снарядов и седьмым входом блока обработки сигналов, при этом данные входы являются третьими входами первого и второго блоков логики, входящих в состав блока определения параметров движения цели, и третьими входами блока логики, входящего в состав блока обработки сигналов, третьи входы блоков логики соединены с входами дифференцирующей цепи, выход которой соединен со вторыми входами матрицы триггеров, выход блока контроля уровня вибрации соединен с восьмым входом блока обработки сигналов, блок контроля уровня вибрации содержит последовательно соединенные согласующее устройство, вычислитель и блок памяти, первая и вторая группы выходов электронной мишени, а также первый, второй, группа третьих и четвертых выходов блока определения параметров движения снарядов соединены соответственно с группой первых, вторых, третьим, четвертым, группой пятых и шестых входов блока обработки сигналов, выход которого соединен по бесконтактной линии связи с входом приемного устройства, выход которого через устройство согласования соединен с входом микроЭВМ, выход которой соединен с выходом индикатора, блок обработки сигналов содержит блок логики, блок определения характеристик рассеивания снарядов, блок памяти, передающее устройство, причем группа первых и вторых входов, а также третий, четвертый, группа пятых и шестых входов блока обработки сигналов являются соответственно группой первых и вторых входов блока логики, а также третьим, четвертым, группой пятых и шестых входов блока памяти, группа выходов блока логики соединена одновременно с входами блока определения характеристик рассеивания снарядов и группой вторых входов блока памяти, выход блока определения характеристик рассеивания снарядов соединен с первым входом блока памяти, выход которого соединен с входом передающего устройства, выход которого является бесконтактным выходом блока обработки сигналов.
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СКОРОСТИ МЕТАЕМОГО ТЕЛА | 2005 |
|
RU2285267C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2147727C1 |
| Устройство для измерения скорости линейного перемещения объекта | 1987 |
|
SU1569714A1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2271014C2 |
| US 5552883 A1 03.09.1996 | |||
| US 8629981 B2 14.01.2014 | |||

