Изобретение относится к полигонным испытаниям и может быть использовано для определения баллистических характеристик снарядов.
Известен способ для измерения скорости метаемого тела, заключающийся в измерении скорости метаемого тела на основе измерения временного интервала между моментами срабатывания двух пространственно разнесенных датчиков, изготовлении датчиков в виде двух перпендикулярных линеек фотоприемников, определении комбинации сработавших элементов фотоприемников, определении координат пролета метаемого тела на основе фиксации комбинации сработавших элементов фотоприемников, выдачи информации о скорости метаемого тела и координат его пролета относительно первого и второго датчиков (Ефанов В.В., Мужичек С.М., патент РФ на изобретение №2285267 от 10.10.2006 г.).
Известно устройство для измерения скорости метаемого тела, которое содержит два разнесенных датчика, первый и второй измерительные приборы, связанные с выходами датчиков первый, второй, третий, четвертый элемент ИЛИ, первый и второй блок логики, а каждый из датчиков выполнен в виде двух перпендикулярно расположенных линеек излучающих диодов и линеек фотоприемников, причем выходы горизонтально расположенной линейки фотоприемников первого датчика соединены одновременно с входами первого элемента ИЛИ и первыми входами первого блока логики, выходы вертикально расположенной линейки фотоприемников первого датчика соединены одновременно с входами второго элемента ИЛИ и вторыми входами первого блока логики, выходы горизонтально расположенной линейки фотоприемников второго датчика соединены одновременно с входами третьего элемента ИЛИ и первыми входами второго блока логики, выходы вертикально расположенной линейки фотоприемников второго датчика соединены одновременно с входами четвертого элемента ИЛИ и вторыми входами второго блока логики, выход первого и второго элемента ИЛИ соединены соответственно с первыми входами первого и второго измерительных приборов, выходы третьего и четвертого элемента ИЛИ соединены соответственно со вторыми входами первого и второго измерительных приборов, выход источника питания соединен с линейками излучающих диодов, блок логики состоит из матрицы элементов И, из матрицы триггеров, блока индикации, причем первые входы матрицы элементов И соединены с первыми входами блока логики, а вторые входы соединены со вторыми входами блока логики, а выходы элементов И соединены с входами триггеров, выходы которых соединены с блоком индикации (Ефанов В.В., Мужичек С.М., патент РФ на изобретение №2285267 от 10.10.2006 г.).
Недостатком данного способа и устройства является невозможность определения параметров движения снарядов относительно центра массы.
Одним из основных параметров движения снаряда относительно центра массы является угол нутации и угловая скорость нутационного движения.
Технической задачей изобретения является повышения информативности за счет определения параметров движения снарядов относительно центра масс.
Решение технической задачи достигается тем, что в способе определения баллистических характеристик снарядов, заключающемся в измерении скоростей снарядов на основе фиксации временных интервалов при пролете снарядов относительно двух разнесенных между собой неконтактных датчиков, формировании измерительного поля неконтактных датчиков в виде двухмерной сетки на основе выполнения конструкция неконтактных датчиков в виде двух линеек излучателей и фотоприемников, размещенных в вертикальной и горизонтальной плоскостях, определении координат пролета снарядов на основе фиксации комбинации сработавших элементов фотоприемников, дополнительно определяют углы нутации на основе измерения основных элементов движения снаряда относительно центра массы, при этом устанавливают на пути движения снарядов некоторое количество неконтактных датчиков и определяют характерные размеры пробоин на каждой мишени, определяют вид пробоин на основе сравнения комбинации сработавших элементов фотоприемников с заданными значениями, определяют нулевое значение угла нутации, в случае если пробоина имеет форму окружности, при этом данный вид пробоины образуется в случае совпадении оси снаряда с вектором скорости центра массы, определяют значения углов нутации при увеличении размера пробоины в направлении отклонения оси снаряда от касательной к траектории, определяют динамику нутационного движения на основе измерения величины большой оси пробоины, определяют время пролета снарядов относительно неконтактных датчиков, осуществляют запись данных о результатах испытаний в блок памяти, с выхода которого данные о результатах испытаний поступают на вычислитель, который определяет опытные зависимости углов нутации от расстояний от некоторого начала отсчета до соответствующего измерительного поля неконтактного датчика, определяют опытные зависимости угла нутации от времени и определяют характер изменения угловых скоростей нутационного движения, определяют состояние стволов оружия на основе сравнения текущих углов нутации с заданными значениями, осуществляют выдачу информации о состоянии стволов на индикатор.
Решение технической задачи достигается тем, что в информационно-вычислительной системе для определения баллистических характеристик снарядов, содержащей два разнесенных в пространстве неконтактных датчика, блок определения скорости и координат движения снарядов, который содержит первый и второй измерительные приборы, связанные с выходами датчиков, первый, второй, третий, четвертый элементы ИЛИ, первый и второй блоки логики, каждый из датчиков выполнен в виде двух перпендикулярно расположенных линеек излучающих диодов и линеек фотоприемников, причем выходы горизонтально расположенной линейки фотоприемников первого датчика соединены одновременно с входами первого элемента ИЛИ и первыми входами первого блока логики, выходы вертикально расположенной линейки фотоприемников первого датчика соединены одновременно с входами второго элемента ИЛИ и вторыми входами первого блока логики, выходы горизонтально расположенной линейки фотоприемников второго датчика соединены одновременно с входами третьего элемента ИЛИ и первыми входами второго блока логики, выходы вертикально расположенной линейки фотоприемников второго датчика соединены одновременно с входами четвертого элемента ИЛИ и вторыми входами второго блока логики, выход первого и второго элементов ИЛИ соединены соответственно с первыми входами первого и второго измерительных приборов, выходы третьего и четвертого элементов ИЛИ соединены соответственно со вторыми входами первого и второго измерительных приборов, выход источника питания соединен с линейками излучающих диодов, блок логики состоит из матрицы элементов И, из матрицы триггеров, причем первые и вторые входы блока логики являются соответственно первыми и вторыми входами матрицы элементов И, выходы которых соединены с первыми входами матрицы триггеров, выходы которых являются выходами блока логики, первым, вторым, группой третьих и четвертых выходов блока определения скорости и координат пролета снарядов являются соответственно выходы первого и второго измерительных приборов, первого и второго блоков логики, дополнительно введены n-2 неконтактных датчиков, блок определения баллистических характеристик снарядов, блок обработки сигналов и кнопка «Пуск», а в блок логики дополнительно введена дифференцирующая цепь, при этом группы первых и вторых выходов каждого из n-неконтактных датчиков соединены группой первых и вторых η входов блока определения баллистических характеристик снарядов, третий вход которого соединен с выходом кнопки «Пуск», а выходы соединены с n-входами блока обработки сигналов, блок определения баллистических характеристик снарядов содержит n-блок определения параметров движения снарядов, каждый из которых содержит блок определения скорости и координат пролета снарядов, первый и второй блоки идентификации вида пробоин, блок идентификации вида пробоин содержит первый и второй задатчики сигналов, первую, вторую и третью матрицу элементов И, матрицу триггеров, матрицу дешифраторов, блок обработки сигналов содержит согласующее устройство, блок памяти, вычислитель, индикатор, группа первых и вторых выходов нечетных и четных n-неконтактных датчиков, выход кнопки «Пуск» являются соответственно первыми, вторыми и третьими, четвертыми группами и пятым входами n-блоков определения параметров движения снарядов, входы которых в свою очередь являются первыми, вторыми, третьими, четвертыми группами и пятым входами блоков определения скорости и координат движения снарядов, кроме того, первый, второй и пятый входы блоков определения скорости и координат движения снарядов являются первыми, вторыми и третьими входами первого блока идентификации вида пробоин, а третий, четвертый и пятый входы блоков определения скорости и координат движения снарядов являются первыми, вторыми и третьими входами второго блока идентификации вида пробоин, пятые входы блоков определения скорости и координат движения снарядов являются третьими входами первого и второго блоков логики, третий вход каждого из которых в свою очередь является входами дифференцирующей цепи, выходы которой соединены с вторыми входами матрицы триггеров, первая, вторая группа и третьи входы блока определения вида пробоин являются соответственно первыми входами второй, первой группы матриц элементов И и второй группой входов матрицы триггеров, выходы первого и второго задатчиков сигналов соединены с первыми входами соответственно первой и второй групп матриц элементов И, выходы которых соединены соответственно с первыми и вторыми входами третьей группы матриц элементов И, выходы которой соединены с первой группой триггеров, выходы которых соединены с входами n дешифраторов, выходы которых являются выходами блока идентификации пробоин.
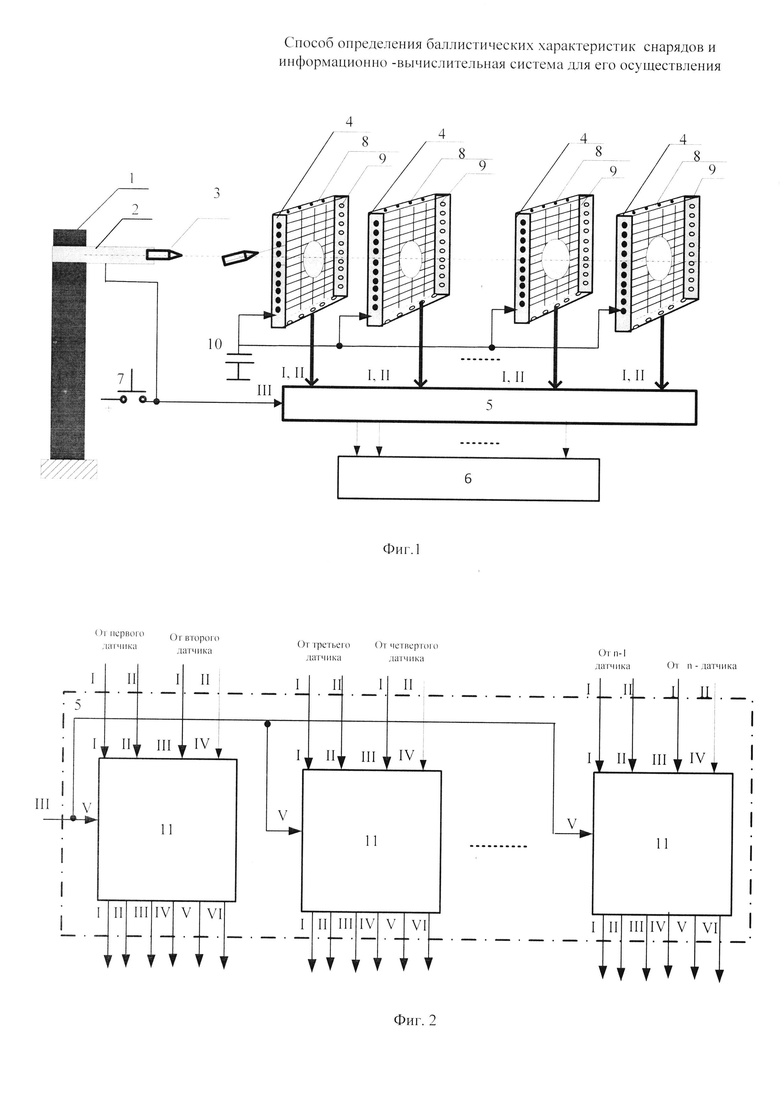
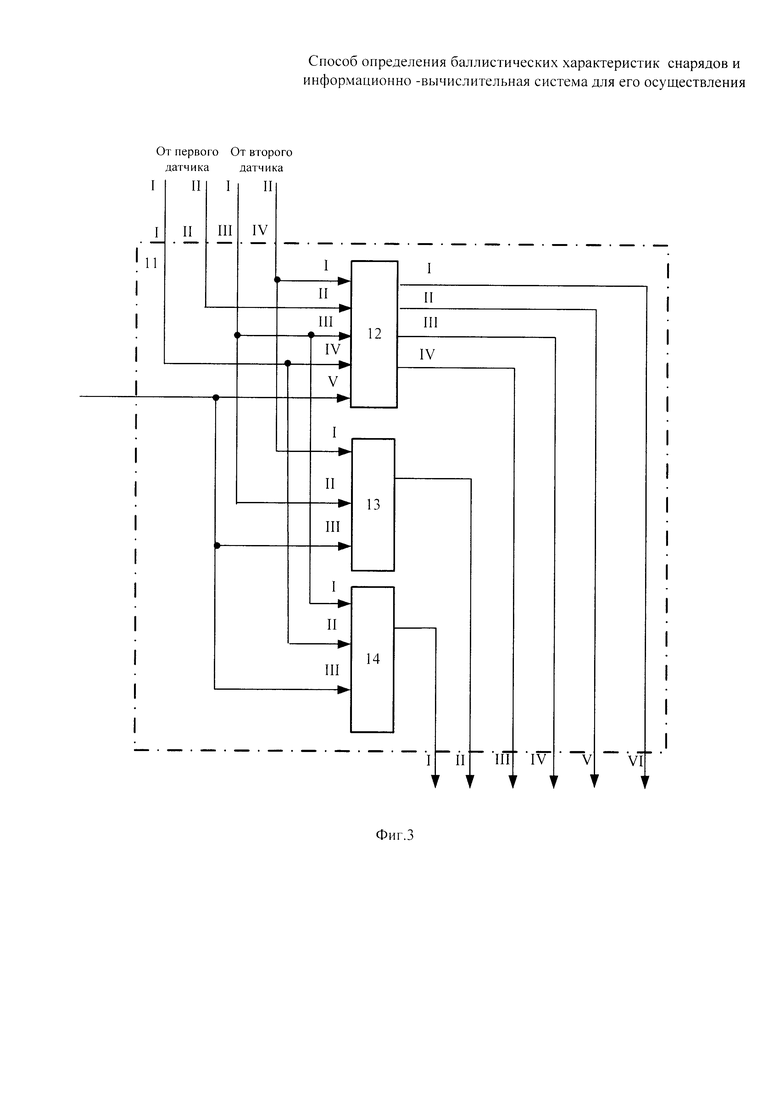
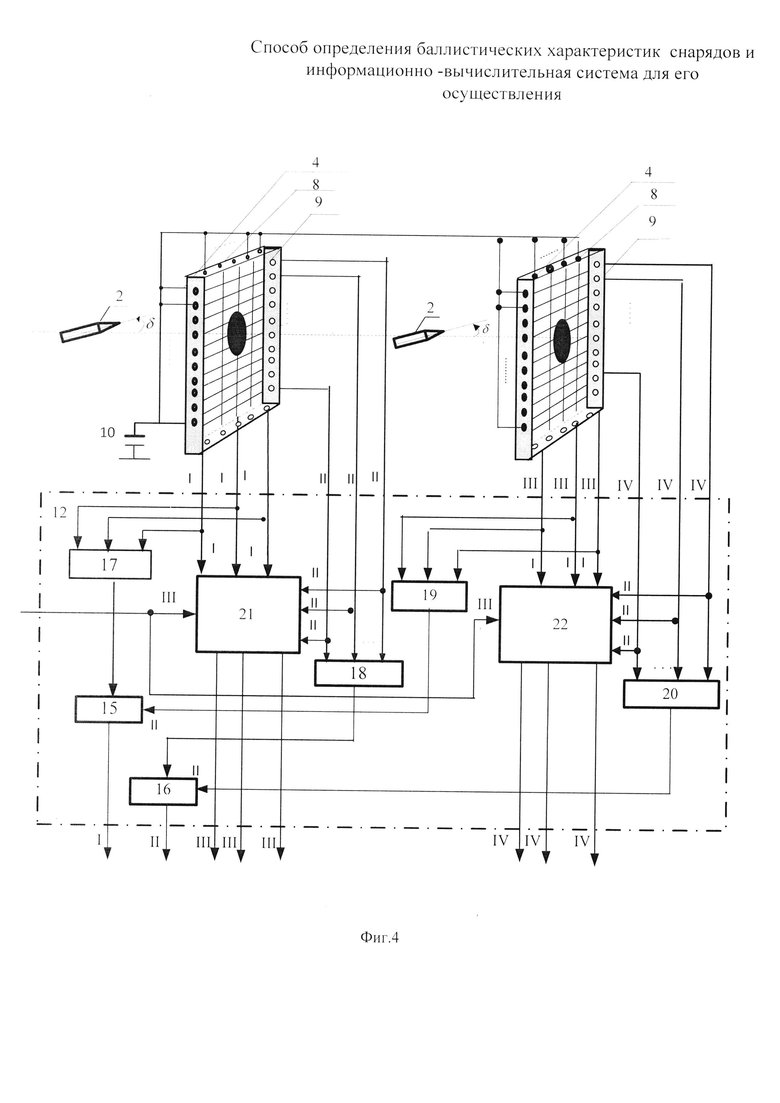
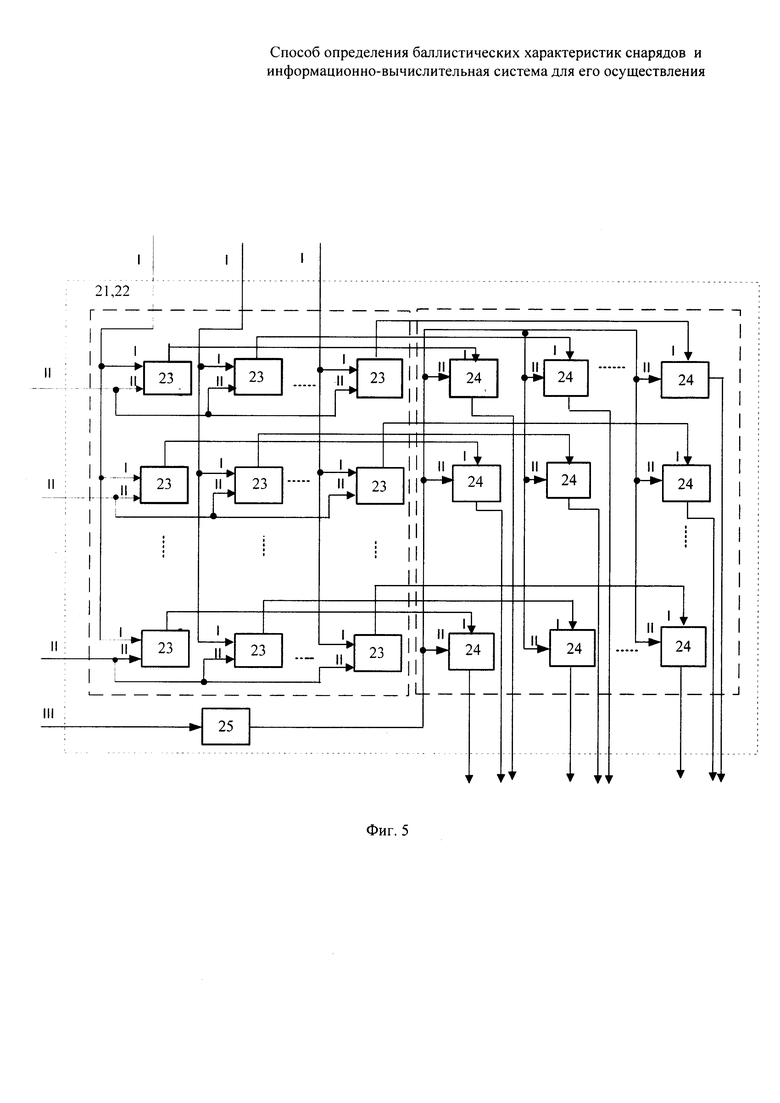
На фиг. 1 приведена структурная схема информационно-вычислительной системы определения баллистических характеристик снарядов, на фиг. 2 - структурная схема блока определения баллистических характеристик снарядов, на фиг. 3 - блока определения параметров движения снарядов, на фиг. 4 - структурная схема блока определения скорости и координат снарядов, на фиг. 5 - структурная схема блока логики, на фиг. 6 - вид пробоины, на фиг. 7 - зависимость угла нутации от расстояний, на фиг. 8 - структурная схема блока идентификации вида пробоин, на фиг. 9 - структурная схема блока обработки сигналов.
Для определения углов нутации на пути движения снарядов устанавливается некоторое количество неконтактных датчиков, закрепленных на рамах. Снаряд дает на измерительных сетках неконтактных датчиков отчетливые пробоины в общем случае в виде овалов, при этом в случае совпадения оси снаряда с вектором скорости центра массы (угол нутации δ=0) пробоина имеет форму окружности, а в случае появление угла нутации увеличивается размер пробоины в направлении отклонения оси снаряда от касательной к траектории.
Информационно-вычислительная система определения баллистических характеристик снарядов содержит артиллерийскую установку 1, оружие 2, снаряды 3, n-неконтактных датчиков 4, которые разнесены в пространстве, блок 5 определения баллистических характеристик снарядов, блок 6 обработки сигналов, кнопку «Пуск».
Конструкция неконтактных датчиков выполнена в виде двух перпендикулярных излучающих диодов 8 и фотоприемников 9, при этом излучающие диоды 8 подсоединены к источнику питания 10.
Блок 5 определения баллистических характеристик снарядов содержит n-блоков 11 определения параметров движения снарядов.
Блок 11 определения параметров движения снарядов содержит блок 12 определения скорости и координат пролета снарядов, первый 13 и второй 14 блоки идентификации вида пробоин.
Блок 12 определения скорости и координат пролета снарядов содержит первый 15 и второй 16 измерительные приборы, первый 17, второй 18, третий 19, четвертый 20 элементы ИЛИ, первый 21 и второй 22 блоки логики.
Блоки 21, 22 логики состоят из матрицы элементов И 23, из матрицы триггеров 24, дифференцирующей цепи 25.
Блок (13, 14) идентификации вида пробоин содержит первый 26 и второй 27 задатчики сигналов, первую 28, вторую 29 и третью 30 матрицу элементов И, матрицу 31 триггеров, дифференцирующую цепь 32, матрицу 33 дешифраторов.
Блок 6 обработки сигналов содержит согласующее устройство 34, блок памяти 35, вычислитель 36, индикатор 37. Описание работы устройства.
Для определения баллистических характеристик снарядов создается мишенная обстановка в виде n-неконтактных датчиков 4, блока 5 определения баллистических характеристик снарядов и блока обработки сигналов, при этом выходы неконтактных датчиков соединены с входами блока 5 определения баллистических характеристик снарядов, выходы которого соединены с входами блока обработки сигналов (фиг. 1).
Наклеивается на первый из n-неконтактных датчиков 4 картон, с центром прицеливания в виде перекрестия, в канал ствола вставляется трубка холодной пристрелки (ТХП) и наводятся стволы по центру перекрестия. Затем вынимается ТХП из канала ствола и производится Np опытных стрельб.
При нажатии кнопки 7 «Пуск» сигнал подается на блок управления стрельбой оружием и на третий вход блока 5 определения баллистических характеристик снарядов, и соответственно через пятый вход блока 11 определения параметров движения цели, на пятый вход блока 12 определения скорости и координат движения снарядов и на третьи входы блоков 13, 14 идентификации вида пробоин (фиг. 2, фиг. 3).
При этом сигнал с пятого входа блоков 12 определения скорости и координат движения снарядов поступает на третьи входы блоков логики и соответственно через дифференцирующую цепь 25 поступает на вторые входы матрицы триггеров 24 и с третьих входов блоков 13, 14 идентификации вида пробоин поступает через дифференцирующую цепь 32 на вторые входы матрицы 31 триггеров (фиг. 3 … фиг. 6).
Таким образом, при нажатии кнопки «Пуск» происходит обнуление матриц триггеров (24, 31) в блоках (21, 22) логики и блоках (13, 14) идентификации видов пробоин.
Каждый из n-блоков 11 определения параметров движения снарядов (входящих в состав блока 5), определяет время и скорость пролета снарядов относительно двух из n неконтактных датчиков 4 и осуществляет идентификацию вида пробоин относительно одного из n неконтактных датчиков 4 (фиг. 2, фиг. 3).
Скорость движения снаряда определяется блоком 12 определения скорости и координат пролета снарядов на основе фиксации временного интервала при пролете снарядов относительно двух датчиков.
В момент пролета снарядов относительно первого из n-неконтактных датчиков 4 происходит срабатывание определенной комбинации чувствительных элементов линейки фотоприемников 9 (фиг. 1, фиг. 4). Сигналы с выходов фотоприемников 9, первого из n-датчиков через первые 17 и вторые 18 элементы ИЛИ поступают одновременно на запуск первого 15 и второго 16 измерительного прибора и на первые и вторые входы первого 21 блока логики (фиг. 4, фиг. 5).
В момент пролета снаряда относительно второго из n-датчиков 4 происходит срабатывание следующей комбинации чувствительных элементов линейки фотоприемников 9 (фиг. 1, фиг. 4). Сигналы с выходов фотоприемников 9, второго из n-датчиков через третий 19 и четвертый 20 элементы ИЛИ поступают одновременно на остановку первого 15 и второго 16 измерительного прибора и на первые и вторые входы второго 22 блока логики (фиг. 4).
Таким образом, обеспечивается определение скоростей движения снарядов на всей баллистической трассе.
Координаты пролета снарядов определяются на основе формирования двухмерной измерительной сетки неконтактными датчиками 4 и фиксации комбинации сработавших линеек фотоприемников 9, при пролете снарядов.
Код сигнала, поступающий на первые и вторые входы блока 21 логики, соответствует координатам пролета снаряда относительно первого из n-неконтактных датчиков (фиг. 4) и обеспечивает срабатывания определенной комбинации матрицы элементов И 23, сигналы с выхода которых обеспечивают срабатывания комбинации матрицы триггеров 24, сигналы с выхода которой обеспечивают определения координат пролета снаряда относительно первого из n-датчиков (фиг. 4).
Аналогично определяются координаты пролета снарядов относительно второго из n-неконтактных датчиков 4.
Вид пробоин, формируемых снарядами, определяется на основе сравнения комбинаций сработавших элементов фотоприемников 9 неконтактных датчиков 24 с эталонными значениями в блоках (13, 14) идентификации вида пробоин.
Снаряд формирует на измерительных двухмерных сетках отчетливые пробоины в общем случае в виде овалов, при этом при совпадении оси снаряда с вектором скорости центра массы (угол нутации δ=0) пробоина имеет форму окружности. Появление угла нутации приводит к увеличению размера пробоины в направлении отклонения оси снаряда от касательной к траектории.
Для определения величины угла нутации по большому размеру пробоины «предварительно строится график зависимости:
δ=f(l),
для чего изготовляется плоская модель снаряда, устанавливается под разными углами на бумаге к горизонтали n-n (фиг. 6) и отмечается проекция l этой плоской модели на перпендикуляр к горизонтали.
Примерный вид графика δ=f(l) изображен на фиг. 7.
При достаточно большом количестве неконтактных датчиков, размещенных на сравнительно коротком участке баллистической трассы, можно получить опытные зависимости
δ=F1(x)
где x - расстояние от некоторого начала отсчета до соответствующего датчика.
При пролете снарядов относительно каждого из n-нечетных и четных неконтактного датчиков 4 сигналы с выходов их измерительных полей поступают на первые и вторые входы n-первых 8 и n-вторых 9 блоков идентификации вида пробоин и соответственно на вторые входы первой 28 и второй 29 групп матриц элементов И, на первые входы которых поступают сигналы с выходов первого 26 и второго 27 задатчиков сигналов.
В результате сравнения текущих сигналов с эталонными значениями с выходов первой 28 и второй 29 групп матриц сигналы поступают соответственно на первые и вторые входы третьей 30 группы матриц, с выходов которых поступают на первую группу матриц 31 триггеров, с выходов которых поступают на входы n дешифраторов 33 (фиг. 8).
В зависимости от вида пробоины с одного из n-дешифраторов 33, которые являются выходами n-блоков (13, 14) идентификации пробоин, сигналы поступают на вход блока 6 обработки сигналов.
Таким образом, на входы блока 6 обработки сигналов, с выходов каждого из n-блоков 11 измерения параметров движения снарядов, поступает информация о времени, скоростях и координатах движения снарядов, а также информация о видах пробоин.
Данная информация через согласующее устройство 34 поступает на блок памяти 35, с выхода которого поступает на вход вычислителя 36 (фиг. 9).
Вычислитель 36 обеспечивает построения зависимостей угла нутации от расстояний:
где x - расстояние от некоторого начала отсчета до соответствующего датчика, зависимость угла нутации от времени:
δ=f1(t),
и характер изменений угловых скоростей нутационного  движения.
движения.
Кроме того, вычислитель 36 определяет состояние стволов оружия на основе сравнения текущих углов нутации с заданными значениями.
Результаты испытаний высвечиваются на экране индикатора 37.
Предлагаемое изобретение позволяет повысить информативность за счет определения скорости, координат движения снарядов, а также определения зависимости углов нутации от расстояний, зависимости углов нутации от времени и характера изменений угловой скорости нутационного движения.
Изобретение относится к области полигонных испытаний, в частности для определений баллистических характеристик снарядов. Способ заключается в измерении скоростей снарядов на основе фиксации временных интервалов при пролете снарядов относительно двух разнесенных между собой неконтактных датчиков, формировании измерительного поля неконтактных датчиков в виде двухмерной сетки на основе выполнения конструкция неконтактных датчиков в виде двух линеек излучателей и фотоприемников, размещенных в вертикальной и горизонтальной плоскостях, определении координат пролета снарядов на основе фиксации комбинации сработавших элементов фотоприемников, определении углов нутации на основе измерения основных элементов движения снаряда относительно центра массы, определении опытных зависимостей углов нутации от расстояний, определении опытных зависимостей угла нутации от времени и определении характера изменения угловых скоростей нутационного движения, определении состояния стволов оружия на основе сравнения текущих углов нутации с заданными значениями, при этом устанавливают на пути движения снарядов некоторое количество неконтактных датчиков и определяют характерные размеры пробоин на каждой мишени и вид пробоин на основе сравнения комбинации сработавших элементов фотоприемников с заданными значениями. Техническим результатом изобретения является повышение информативности за счет определения параметров движения снарядов относительно центра масс. 9 ил.
Способ определения баллистических характеристик снарядов, заключающийся в измерении скоростей снарядов на основе фиксации временных интервалов при пролете снарядов относительно двух разнесенных между собой неконтактных датчиков, формировании измерительного поля неконтактных датчиков в виде двухмерной сетки на основе выполнения конструкции неконтактных датчиков в виде двух линеек излучателей и фотоприемников, размещенных в вертикальной и горизонтальной плоскостях, определении координат пролета снарядов на основе фиксации комбинации сработавших элементов фотоприемников, отличающийся тем, что дополнительно определяют углы нутации на основе измерения основных элементов движения снаряда относительно центра массы, при этом устанавливают на пути движения снарядов некоторое количество неконтактных датчиков и определяют характерные размеры пробоин на каждой мишени, определяют вид пробоин на основе сравнения комбинации сработавших элементов фотоприемников с заданными значениями, определяют нулевое значение угла нутации, в случае если пробоина имеет форму окружности, при этом данный вид пробоины образуется в случае совпадения оси снаряда с вектором скорости центра массы, определяют значения углов нутации при увеличении размера пробоины в направлении отклонения оси снаряда от касательной к траектории, определяют динамику нутационного движения на основе измерения величины большой оси пробоины, определяют время пролета снарядов относительно неконтактных датчиков, осуществляют запись данных о результатах испытаний в блок памяти, с выхода которого данные о результатах испытаний поступают на вычислитель, который определяет опытные зависимости углов нутации от расстояний от некоторого начала отсчета до соответствующего измерительного поля неконтактного датчика, определяют опытные зависимости угла нутации от времени и определяют характер изменения угловых скоростей нутационного движения, определяют состояние стволов оружия на основе сравнения текущих углов нутации с заданными значениями, осуществляют выдачу информации о состоянии стволов на индикатор.
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СКОРОСТИ МЕТАЕМОГО ТЕЛА | 2005 |
|
RU2285267C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК ОСКОЛОЧНОГО ПОЛЯ СНАРЯДА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2498317C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ВНЕШНЕБАЛЛИСТИЧЕСКИХ ПАРАМЕТРОВ МЕТАТЕЛЬНОГО ЭЛЕМЕНТА С ПОМОЩЬЮ ФОТОЛИНЕЕК И СВЕТОВЫХ ЭКРАНОВ | 2005 |
|
RU2278388C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СКОРОСТИ МЕТАЕМОГО ТЕЛА | 2006 |
|
RU2326388C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УСЛОВИЙ ПОДХОДА СНАРЯДА К МИШЕНИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2518853C2 |
| US 3727069 A1 10.04.1973. | |||

