v
flfej
rgjbW; ду j4-4rgji
СД O CO 4
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения скорости линейного перемещения объекта | 1987 |
|
SU1661644A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СКОРОСТИ ОБЪЕКТА | 1992 |
|
RU2046343C1 |
| Устройство для измерения скорости перемещения объекта | 1989 |
|
SU1737345A1 |
| ИМПУЛЬСНО-ФАЗОВАЯ РАДИОВЫСОТОМЕРНАЯ СИСТЕМА | 2013 |
|
RU2551448C1 |
| Устройство для измерения скорости перемещения | 1987 |
|
SU1615618A1 |
| Устройство для измерения положения и диаметра объекта | 1987 |
|
SU1441200A1 |
| РАДИОНАВИГАЦИОННАЯ СИСТЕМА (БАГИС-А) | 1995 |
|
RU2097780C1 |
| Гидрологический измеритель скорости звука | 1986 |
|
SU1465715A2 |
| Способ определения путевой скорости объекта | 1991 |
|
SU1807429A1 |
| Ультразвуковой уровнемер | 1985 |
|
SU1364889A1 |
Изобретение относится к контрольно-измерительной технике и может быть использовано для измерения линейной скорости технологических и транспортных объектов, а также при проведении баллистических экспериментов. Цель изобретения - повышение точности и информативности измерений на фиксированном участке траектории движения объекта. Излучение источника 1 распространяется внутри многопроходового оптического резонатора, состоящего из отражателей 3, попарно расположенных по обеим сторонам его продольной оси. Выходящее из резонатора излучение, многократно пересекающее под прямым углом продольную ось, попадает в приемник 2, выход которого подключен к программируемому измерителю временных интервалов. Движение объекта вдоль оси резонатора приводит к поочередному экранированию излучения и появлению электрических импульсов на входе измерителя временных интервалов. По измеренным значениям периода сигнала в вычислителе определяются как средняя скорость объекта, так и распределение скорости на заданном участке траектории его движения. 2 ил.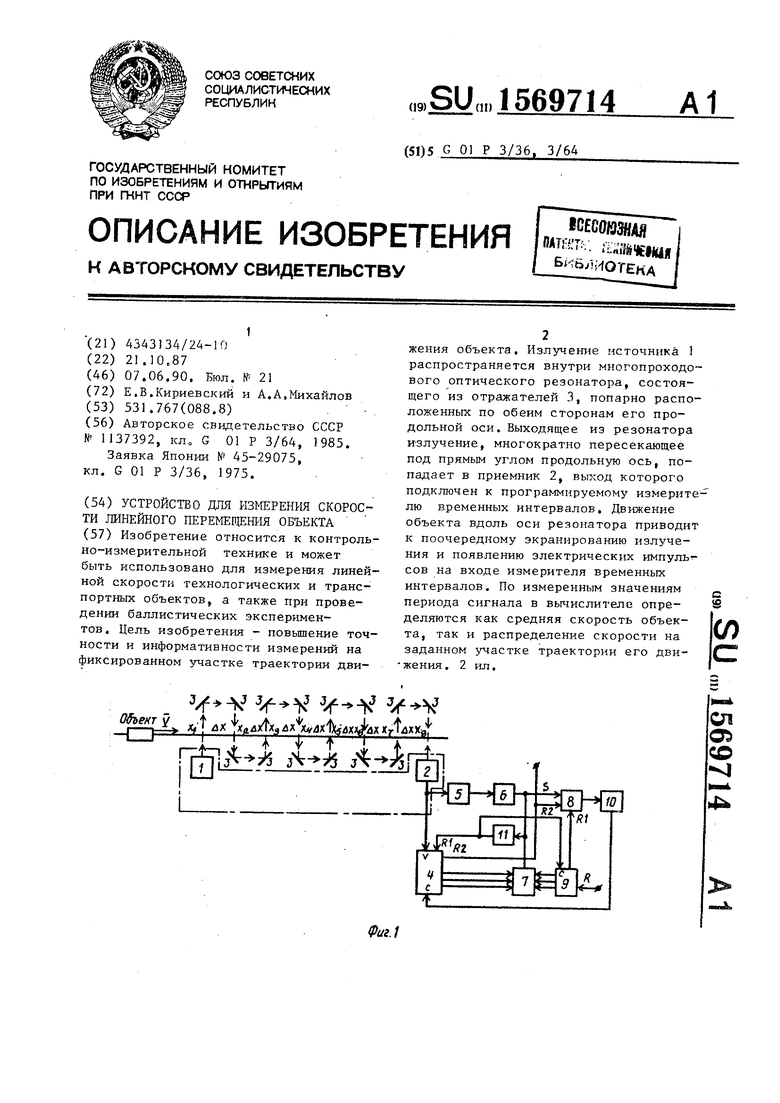
Изобретение относится к контрольно-измерительной технике„ предназначено для измерения скорости линейного перемещения движущегося объекта в фик сированной области пространства и может быть использовано при проведении баллистических экспериментов.
Целью изобретения является повышение точности измерения средней скорости на заданном отрезке траектории объекта и повышение информативности измерений за счет повышения пространственного разрешения путем увеличения.
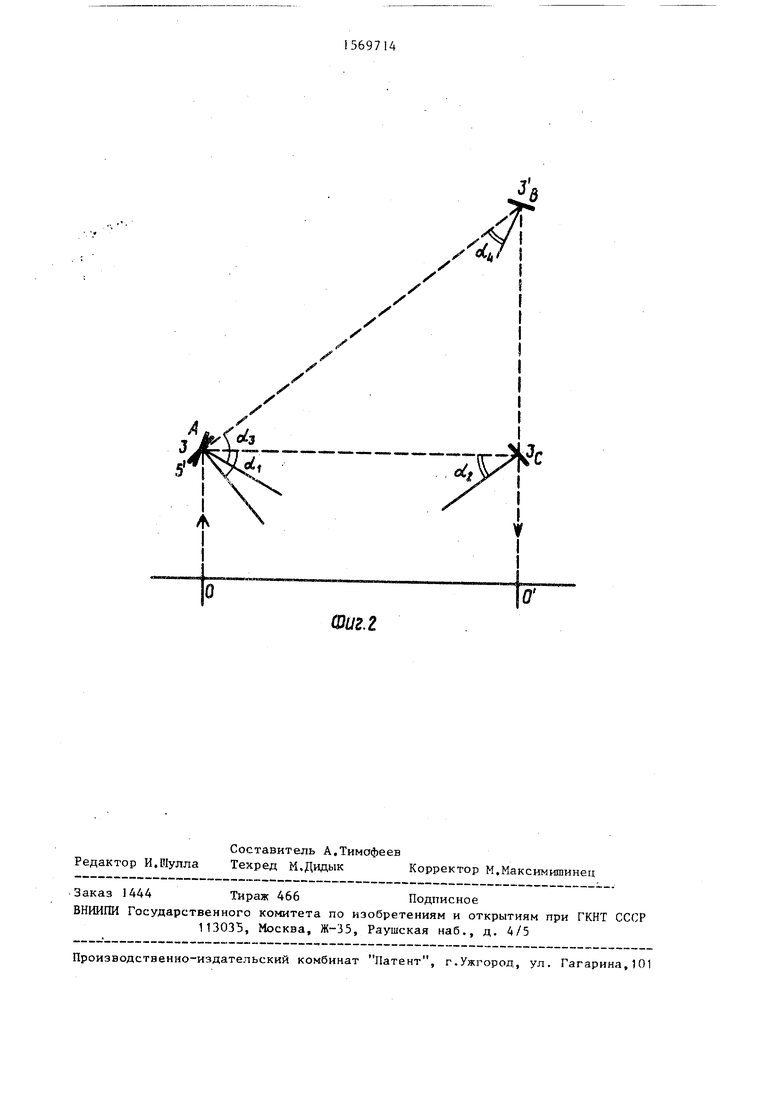
На фиг.1 приведена блок-схема устройства; на фиг.2 - геометро-оптические построения и вывод условия для суммы углов падения (отражения) для каждой из пар отражателей.
Устройство содержит датчик, состоя гций из источника 1 и приемника 2 излучения света, две системы 3 отражателей, составляющих многопроходовый оптический резонатор одна из которых расположена по.одну, а другая - по другую стороны .траектории движения объекта, измеритель временных интервалов (ИВИ), состоящий,, например,. из счетчика 4, одновибратора 5, первого элемента 6 задержки, вычислителя 7, RS-триггера 8, делителя 9 частоты, генератора 10 импульсов и второго элемента 11 задержки
Выход приемника излучения датчика 2 соединен с управляющим входом счетчика 4 и через одновибратор 5 и первый элемент б задержки с входом стробирования вычислителя 7 и с S- входом RS-триггера 8, а через второй элемент 11 задержки с первым R-вхо- дом счетчика 4 и с С-входом делителя
9частоты. Выход триггера 8 соединен с управляющим входом генератора
10импульсов, выход которого соединен с С-входом счетчика 4 Первый RS-триггера 8 соединен с основным выходом делителя 9 частоты, счетные выходы которого соединены
с вторыми информационными входами вычислителя 7, к первым информационным входам которого подключены информационные выходы счетчика 4. Вторые R-входы RS-триггера 8 и счетчика 4, R-вход делителя 9 частоты подключены к входу установки устройства в исходное состояние,,
Отражатели резонатора выполнены в виде дискретных зеркальных призмен
ных элементов, расположенных так, что сумма углов падения (отражения) луча на первое и второе, третье и четвертое, пятое и шестое и так далее зеркала, входящие в каждую из двух отражателей ,равны 90 , На фиг.2 показаны два частных случая взаимного расположения зеркал (первого и второго, третьего и четвертого и так далее), входящих в одну из двух систем от- ражателей, обеспечивающих параллельность падающего и отраженного пучков.
Устройство работает следующим образом.
В делителе 9 частоты ИВИ в исходном состоянии установлен коэффициент деления, равный количеству то5
0
5
0
5
0
5
0 чек (Фиг.1, восемь точек: X,, X
Xg) измерения скорости. В память вычислителя 7 занесены значения длин отрезков ИХ; траектории между точками измерения скорости. В исходном состоянии триггер 7 и г.четчик 4 обнулены. При появлении на контролируемой траектории объекта, длина которого вдоль траектории ИХ -, последний пересекает луч в точке Х1 траектории движения и перекрывает его, затемняя вход приемника 20 В результате на выходе последнего формируется первый импульс, который вторично сбрасывает счетчик 4 в исходное состояние (через элементы 6 и Il задержки и одновибратор 5). При исчезновении импульса на выходе приемника 2 (переход объекта в точку (Х X Х траектории) включается счетчик 4 для накопления импульсов по счетному входу счетчика 4, Передним фронтом первого импульса (объект в точке X , ) включается по S-входу триггер 8, который включает генератор 10 импульсов, а при включении счетчика 4 в нем начинают накапливаться импульсы эталонной частоты в течение времени прохождения объекта от одного пересечения с лучом (точка X.,) до другого пересечения с лучом (точка Х), При вторичном пересечении объектом луча в точке Хг вследствие очередного прерывания светового сигнала на входе приемника 2 на его выходе формируется сигнал, который выключает по управляющему входу счетчик 4, а передним фронтом, выделенным одновибратором 5 и задержанным первым элементом 6 эадержкир переписывает состояние счет51
чика 4 по входной регистр вычислителя 7. После этого через временную задержку, задаваемую элементом 11, счетчик 4 сбрасывается в исходное состояние и после исчезновения сигна ла на выходе приемника 2 (переход объекта в точку Х3 7Х X ) начинается измерение интервала времени между двумя пересечениями объектом луча (X и Х3). После сброса счетчика 4 в точке X . в делитель 9 частоты поступает счетная единица, и по его счетным выходам задается адрес ячейки памяти вычислителя, в кото- рой занесена информация о значении данного отрезка Л X . траектории Эта информация используется для установлния соответствия между расстоянием АХ и временем ut прохождения это- го расстояния объектом, для вычисления в вычислителе 7 скорости Vf на данном отрезке ЛХ- траектории по формуле
V; 4X.ykt;,
Выборка соответствующего значения интервала траектории ДХ ; из памяти вьгчислителя 7 осуществляется, например, импульсом по стробирующему вхо- ду вычислителя 7„ После прохождения последней точки траектории движения на выходе делителя 9 частоты формируется сигнал, сбрасывающий тригер 8 в исходное состояние и блокирующий работу генератора 10 импуль146
сов. При этом устройство приходит в
исходное состояние. I
Таким образом, в устройстве осу- ществляется измерение скорости перемещения объекта одним датчиком (источник излучения - приемник излучения) с повышенной точностью за счет обеспечения возможности многократного пересечения траектории движения объекта зондирующим лучом от одного датчика. При этом измеряется набор значений средних скоростей на существенно меньших интервалах траектории, лежащих внутри заданного интервала наблюдения, что повышает информативность измерений, например, при ускоренном движении объекта.
Формула изобретения
Устройство для измерения скорости линейного перемещения объекта, содер- жаиее источник и приемник излучения, оптически согласованные через мното- проходовый оптический резонатор, измеритель временных интервалов и вычислитель, отличающееся тем, что, с целью повышения точности и информативности измерений, резонатор состоит из N отражателей , установленных по обеим сторонам продольной оси резонатора, так что сумма углов падения (2п)-го и 2п-го отражателей равна 90°, где ,2, . ,.,N.
X
X
X
X
X
Шг.2
X
X
X &ь
| Устройство для измерения скорости транспортного средства | 1983 |
|
SU1137392A1 |
| Железобетонный фасонный камень для кладки стен | 1920 |
|
SU45A1 |
