ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Хирургические сшивающие устройства используются для одновременного выполнения продольного разреза ткани и установления рядов скоб на противолежащих сторонах разреза. Такие инструменты обычно имеют концевой захват, состоящий из двух совместно действующих браншей, которые, если инструмент предназначен для эндоскопического или лапароскопического применения, могут быть проведены через просвет канюли. В одной из браншей установлен картридж со скобками, содержащий по меньшей мере два расположенных по бокам ряда скоб: по одному с каждой стороны от желоба скальпеля. Другая бранша представляет собой упорную пластину с формирующими скобу углублениями, расположенными соответственно рядам скоб в картридже. Инструмент содержит множество клиньев, которые, совершая возвратно-поступательные движения наружу, проходят через отверстия в картридже со скобами и приводят в действие направляющие, в которых находятся скобы, так что последние выталкиваются в направлении упорной пластины. Одновременно режущий инструмент (скальпель) перемещается по бранше в дистальном направлении так, что зажатая ткань одновременно рассекается и фиксируется (например, скобами).
Пример хирургического сшивающего устройства, применяемого в эндоскопической хирургии, описан в заявке на патент США № 2004/0232196 A1 «Хирургические сшивающие устройства с раздельными зажимающей и сшивающей системами», который включен в настоящий документ путем ссылки. Во время работы хирург может сомкнуть бранши сшивающего аппарата на ткани, чтобы придать ей надлежащее положение перед наложением скоб. Когда хирург сочтет, что ткань захвачена надлежащим образом, он может привести в действие хирургический сшивающий аппарат, таким образом разрезая и сшивая ткань. Одновременное разрезание и сшивание тканей исключает осложнения, которые могут возникать при последовательном выполнении этих действий различными хирургическими инструментами, которые соответственно только рассекают или только сшивают ткани.
Специалистам известны режущие эндоскопические аппараты с приводом. В таких устройствах режущее и сшивающее действия инструмента выполняются с помощью электропривода. Также известно использование расположенной в рукоятке инструмента батареи для подачи энергии на привод. Один из таких хирургических инструментов с приводом описан в опубликованной заявке на патент США № 2007/0175952 A1 «Хирургический режущий и сшивающий инструмент с приводом с обратной связью по усилию нагрузки», полностью включенной в настоящий документ путем ссылки.
КРАТКОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
В одном общем аспекте настоящее изобретение направлено на создание хирургического инструмента с фиксирующим ткань концевым зажимом, в котором инструмент блокируется, когда толщина ткани, зафиксированной в концевом зажиме, находится за пределами предусмотренного диапазона толщины. В соответствии с различными вариантами осуществления концевой зажим содержит модуль анализа толщины ткани, который определяет толщину ткани, фиксируемой в концевом зажиме. Хирургический инструмент также содержит цепь управления, которая обменивается данными (например, беспроводным образом) с модулем анализа толщины ткани. Цепь управления препятствует приведению в действие рабочей части концевого зажима, когда толщина ткани, зафиксированной в концевом зажиме, находится за пределами предусмотренного диапазона толщины. Таким образом становится возможным заблокировать инструмент, когда в концевом зажиме зафиксировано слишком мало или слишком много ткани. Это препятствует использованию инструмента в ситуациях, когда его нельзя использовать.
В соответствии с различными вариантами осуществления концевой зажим содержит противолежащие первую и вторую бранши и одноразовый картридж (например, одноразовый картридж со скобами), размещенный в первой бранше. Модуль анализа толщины ткани может являться частью одноразового картриджа и может содержать датчик Холла. Вторая бранша может содержать магнит, при этом указанный датчик Холла определяет силу магнитного поля магнита, которая характеризует толщину ткани, зафиксированной в концевом зажиме. Модуль анализа толщины ткани обеспечивает передачу данных в цепь управления, при этом данные включают в себя: (i) данные, характеризующие толщину ткани, зафиксированной в концевом зажиме, (ii) данные, характеризующие тип одноразового картриджа. Цепь управления может содержать процессорное устройство, запрограммированное для определения того, находится ли толщина зафиксированной в концевом зажиме ткани в диапазоне толщины, предусмотренном для одноразового картриджа, на основе данных, переданных модулем анализа толщины ткани в цепь управления. В этой связи цепь управления также может содержать твердотельный накопитель, в котором хранится информация о допустимых диапазонах толщины для одного или нескольких типов картриджей. Процессорное устройство может быть запрограммировано для определения того, находится ли толщина зафиксированной в концевом зажиме ткани в диапазоне толщины, предусмотренном для одноразового картриджа, на основе данных, переданных модулем анализа толщины ткани в цепь управления, путем сравнения данных, характеризующих толщину зафиксированной в концевом зажиме ткани, с сохраненными данными о диапазоне толщины для типа одноразового картриджа в концевом зажиме.
ФИГУРЫ
В настоящем документе приведено описание различных вариантов осуществления настоящего изобретения на примерах, которые проиллюстрированы следующими фигурами.
На Фиг.1, 2 и 12 представлены изображения хирургического инструмента в соответствии с различными вариантами осуществления настоящего изобретения.
На Фиг.3-5 представлены изображения концевого зажима и вала хирургического инструмента в разобранном виде в соответствии с различными вариантами осуществления настоящего изобретения.
На Фиг.6-7 представлены изображения концевого зажима в соответствии с различными вариантами осуществления настоящего изобретения.
На Фиг.8 представлена блок-схема модуля анализа толщины ткани в соответствии с различными вариантами осуществления настоящего изобретения.
На Фиг.9 представлена блок-схема цепи управления приводом в соответствии с различными вариантами осуществления настоящего изобретения.
На Фиг.10 представлена блок-схема радиомодуля в соответствии с различными вариантами осуществления настоящего изобретения.
На Фиг.11 представлена схема процесса, выполняемого цепью управления приводом в соответствии с различными вариантами осуществления настоящего изобретения.
ОПИСАНИЕ
Для более полного понимания конструкции, принципов работы, технологии производства и использования устройств и способов, описанных в настоящем документе, ниже приведено описание некоторых вариантов осуществления настоящего изобретения. Один или несколько примеров вариантов осуществления настоящего изобретения представлены на сопроводительных иллюстрациях. Специалистам в данной области будет понятно, что конкретные устройства и способы, описанные в настоящем документе и проиллюстрированные на сопроводительных фигурах, не являются ограничивающими вариантами осуществления настоящего изобретения, а также что объем данных вариантов осуществления определяется только формулой изобретения. Особенности, проиллюстрированные или описанные применительно к одному варианту осуществления, могут сочетаться с особенностями других вариантов осуществления. Предполагается, что объем прилагаемой формулы изобретения охватывает все такие модификации и изменения.
Как правило, варианты осуществления настоящего изобретения направлены на создание хирургического инструмента, в котором инструмент блокируется, если толщина зафиксированной в концевом зажиме инструмента ткани выходит за допустимые пределы (например, толщина ткани слишком велика или слишком мала). Таким образом можно предотвратить использование инструмента в ситуациях, когда его нельзя использовать. Если толщина ткани находится за пределами допустимого для инструмента диапазона, оператор (например, хирург) может, например, скорректировать толщину зафиксированной ткани или заменить картридж.
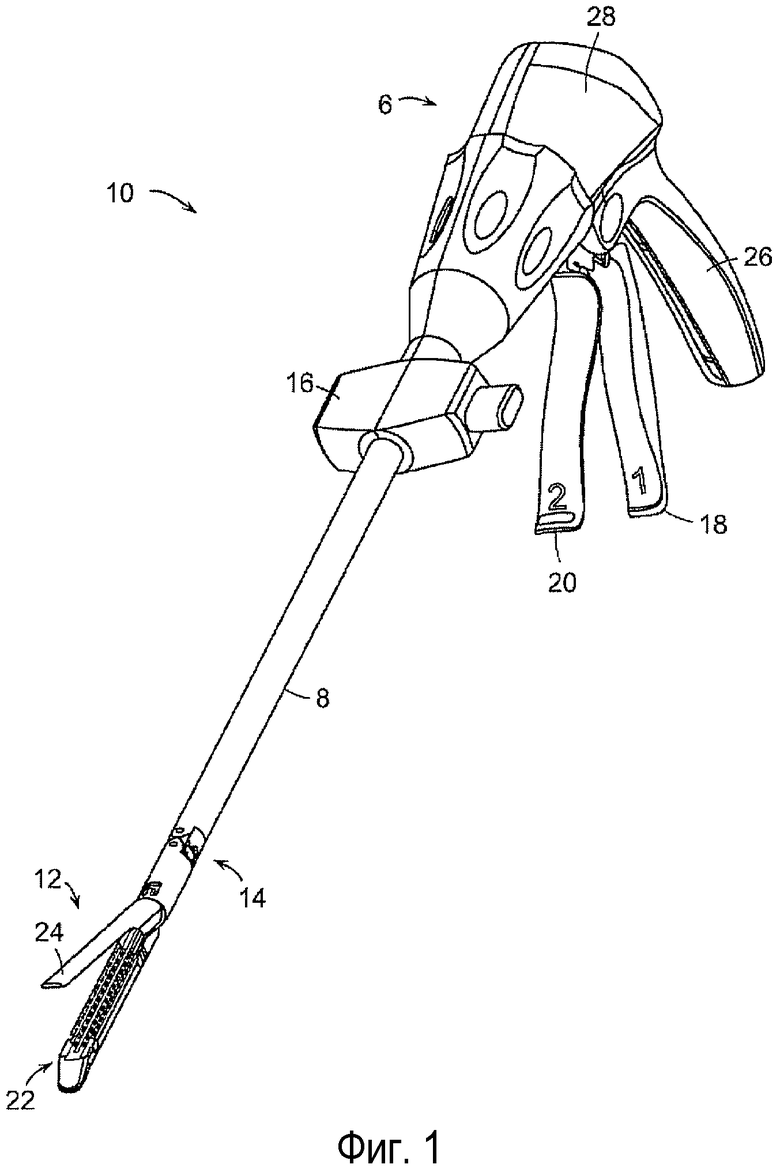
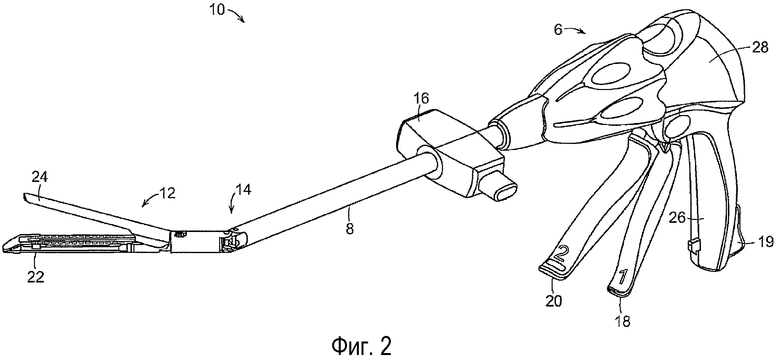
В соответствии с различными вариантами осуществления указанный инструмент может приводиться в действие приводом или вручную. На Фиг.1 и 2 представлен режущий и сшивающий хирургический инструмент 10 с приводом в соответствии с различными вариантами осуществления настоящего изобретения. Изображенный на фигурах вариант осуществления представляет собой линейный эндоскопический инструмент, а также, как правило, варианты осуществления инструмента 10, описанные в настоящем документе, представляют собой линейные эндоскопические режущие и сшивающие хирургические инструменты. Необходимо отметить, что настоящее изобретение не ограничивается этим, и что в соответствии с другими вариантами осуществления настоящего изобретения указанный инструмент может представлять собой эндоскопический инструмент другого типа, такой как круговой или изогнутый режущий эндоскопический аппарат. Кроме того, описанный инструмент может представлять собой неэндоскопический хирургический режущий и сшивающий инструмент, такой как инструмент для лапароскопической или открытой хирургии.
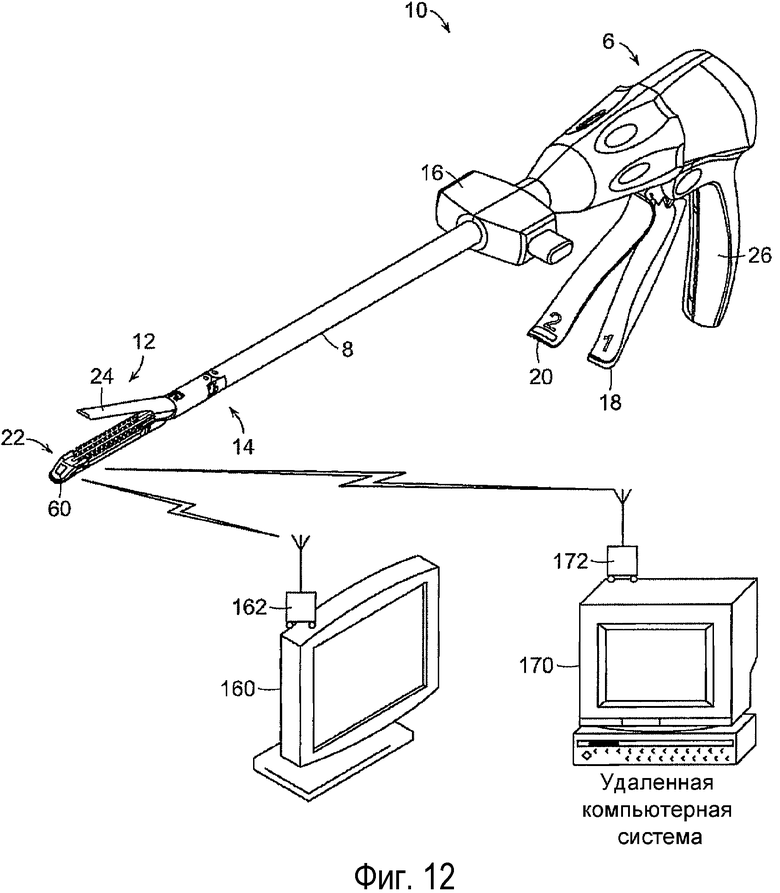
Хирургический инструмент 10, изображенный на Фиг.1 и 2, содержит рукоятку 6, вал 8 и концевой зажим 12, соединенный с валом 8. В различных вариантах осуществления концевой зажим 12 может быть шарнирно закреплен на шарнирном сочленении 14. Рядом с рукояткой 6 может располагаться устройство управления шарнирным сочленением 16, обеспечивающее вращение концевого зажима 12 на шарнирном сочленении 14. В представленном варианте осуществления концевой зажим 12 выполнен в виде режущего эндоскопического аппарата, предназначенного для фиксации, рассечения и сшивания тканей, однако в других вариантах осуществления могут использоваться иные типы концевых зажимов, предназначенные для других типов хирургических манипуляций, такие как зажимы, щипцы, рассекатели, клипсонакладыватели, устройства доступа, устройства для введения медикаментов/генной терапии, проведения ультразвуковых, радиочастотных или лазерных процедур и т.д. Более подробное описание радиочастотных устройств приведено в патенте США № 5403312 и заявке на патент США с регистрационным № 12/031573 «Хирургический режущий и сшивающий инструмент с РЧ-электродами», поданной 14 февраля 2008 года, которые полностью включены в настоящий документ путем ссылки.
Рукоятка 6 инструмента 10 может иметь закрывающее спусковое устройство 18 и пусковое устройство 20, приводящее в действие концевой зажим 12. Необходимо понимать, что инструменты с концевыми зажимами, предназначенные для выполнения различных хирургических манипуляций, могут иметь разное количество и типы пусковых устройств или иных соответствующих средств управления концевым зажимом 12. На фигуре показано, что концевой зажим 12 отделен от рукоятки 6 удлиненным валом 8. В одном варианте осуществления хирург или оператор инструмента 10 может вращать концевой зажим 12 относительно вала 8, используя устройство управления шарнирным сочленением 16, как более подробно описано в опубликованной заявке на патент США № 2007/0158385 A1 «Хирургические инструменты с шарнирным концевым зажимом» (автор Geoffrey C. Hueil и др.), полностью включенной в настоящий документ путем ссылки.
В приведенном примере концевой зажим 12, помимо прочего, имеет желоб для скоб 22 и поворотный зажимный элемент, например, упорную пластину 24, между которыми поддерживается расстояние, обеспечивающее эффективное сшивание и рассечение тканей, захваченных концевым зажимом 12, когда упорная пластина 24 находится в зажатом положении. Рукоятка 6 включает направленную вниз пистолетную рукоятку 26, к которой хирург прижимает закрывающий спусковой крючок 18 для зажатия или прижатия упорной пластины 24 к желобу для скоб 22 концевого зажима 12, чтобы зажать ткань, размещенную между упорной пластиной 24 и желобом 22. Пусковое устройство 20 расположено снаружи относительно закрывающего спускового крючка 18. Когда закрывающий спусковой крючок 18 фиксируется в положении закрытия, пусковой крючок 20 может несколько проворачиваться к пистолетной рукоятке 26, так что оператор сможет достать его одной рукой. Затем оператор может прижать пусковой крючок 20 к пистолетной рукоятке 12, осуществляя сшивание и рассечение ткани, зажатой в концевом зажиме 12. В других вариантах осуществления могут использоваться другие типы зажимающих элементов, помимо упорной пластины 24. Рукоятка 6 также может включать верхнюю часть 28, расположенную поверх руки пользователя, когда пользователь захватывает пистолетную рукоятку 26 рукой.
Необходимо принять во внимание, что термины «проксимальный» и «дистальный» используются в настоящем документе по отношению к хирургу, удерживающему рукоятку 6 инструмента 10. Так, концевой зажим 12 расположен дистально по отношению к рукоятке 6, расположенной более проксимально. Необходимо также принять во внимание, что для удобства и ясности такие пространственные термины как «вертикальный» и «горизонтальный» используются в настоящем документе по отношению к фигурам. Однако использование хирургических инструментов предполагает множество ориентаций и положений, поэтому указанные термины не являются абсолютными и ограничивающими настоящее изобретение.
При использовании инструмента сначала может быть нажат закрывающий спусковой крючок 18. Когда хирурга устраивает положение концевого зажима 12, он может оттянуть закрывающий спусковой крючок 18 в фиксированное положение полного закрытия, вплотную к пистолетной рукоятке 26. Оттягивание закрывающего спускового крючка 18 приводит к повороту упорной пластины 24 вниз и зажатию ткани между упорной пластиной 24 и желобом 27. После этого может быть нажат пусковой крючок 20. Нажатие пускового крючка 20 приводит к тому, что режущий инструмент в концевом зажиме 12 рассекает зафиксированные ткани, а сшивающие устройства в концевом зажиме скрепляют рассеченные ткани. Когда хирург отпускает пусковой крючок 20, крючок возвращается в открытое положение (см. Фиг.1 и 2). Для того чтобы разблокировать закрывающий спусковой крючок 18, необходимо нажать фиксирующую кнопку 19 на рукоятке 6. Фиксирующая кнопка 19 может быть выполнена в различных формах, например, как описано в опубликованной заявке на патент США № 2007/0175955 «Хирургический режущий и сшивающий инструмент с механизмом фиксации закрывающего спускового крючка», которая полностью включена в настоящий документ путем ссылки.
Концевой зажим 12 может включать режущий инструмент, такой как скальпель, для рассечения зафиксированной в концевом зажиме 12 ткани при нажатии пользователем пускового крючка 20. Концевой зажим 12 может также содержать средства закрепления рассеченной режущим инструментом ткани, такие как скоби, РЧ-электроды, клеи и т.д. Более подробное описание возможных конфигураций концевого зажима 12 можно найти в следующих патентах и опубликованных заявках на патент, которые полностью включены в настоящий документ путем ссылки: патент № 5709680, патент № 5688270, патент № 7000818, заявка № 2005/0173490 A1, заявка № 2006/0025809 A1, заявка № 2007/0102453 A1, № 2007/0102452 A1, заявка № 2009/0206134 A1 и заявка № 2009/0206124 A1.
Инструмент 10 также может содержать закрывающую систему для закрытия (фиксации) концевого зажима при закрытии (прижимании) закрывающего спускового крючка 18. Более подробное описание вариантов осуществления возможной закрывающей системы для закрытия (или фиксации) упорной пластины 24 концевого зажима 12 при прижимании закрывающего спускового крючка 18 можно найти в следующих патентных документах США, которые полностью включены в настоящий документ путем ссылки: опубликованная заявка на патент № 2004/0232196 A1, опубликованная заявка на патент № 2007/0125956 A1, опубликованная заявка на патент № 2007/0158385 A1, опубликованная заявка на патент 2007/0175962 A1, патент № 7464849, а также в документах, процитированных в предыдущем параграфе.
Перемещаемый поступательно или вращательно приводной вал, расположенный внутри вала 8 инструмента 10, может приводить в действие режущий инструмент и средства скрепления ткани концевого зажима 12. Для прямого или непрямого (через цепь зубчатых передач) управления приводным валом может использоваться электропривод, расположенный в пистолетной рукоятке 26 рукоятки 6 инструмента 10. В различных вариантах осуществления привод может представлять собой коллекторный двигатель постоянного тока с максимальной скоростью вращения приблизительно 25000 об/мин. В других вариантах осуществления привод может представлять собой бесколлекторный двигатель, беспроводной двигатель, синхронный двигатель, шаговый двигатель или любой другой соответствующий электропривод. В пистолетной рукоятке 26 рукоятки 6, рядом с приводом, может быть размещена батарея (или источник энергии, или блок питания), например, литий-ионная батарея. Батарея обеспечивает подачу электроэнергии к приводу через цепь управления приводом. В соответствии с различными вариантами осуществления в качестве источника энергии для подачи энергии на привод может использоваться несколько последовательно соединенных элементов питания. Кроме того, источник энергии может быть сменным и/или перезаряжаемым.
Как более подробно описано ниже, работой привода может управлять цепь управления на основе процессора или микроконтроллера, которая может быть размещена в рукоятке 6 инструмента 10 рядом с приводом и батареей. Цепь управления может принимать от концевого зажима 12 сигнал, характеризующий толщину ткани, зажатой между противолежащими браншами (например, желоб для скоб 22 и упорная пластина 24) концевого зажима 12. Цепь управления может обмениваться данными с модулем анализа толщины ткани концевого зажима 12 через беспроводной или проводной канал. Если цепь управления определит, что толщина зафиксированной ткани выходит за рамки допустимых пределов (например, слишком велика или слишком мала), исходя из полученного от модуля анализа толщины ткани сигнала цепь управления может заблокировать работу привода, таким образом предотвращая использование инструмента. Перед обсуждением цепи управления ниже приведено обсуждение концевого зажима 12 и модуля анализа толщины ткани.
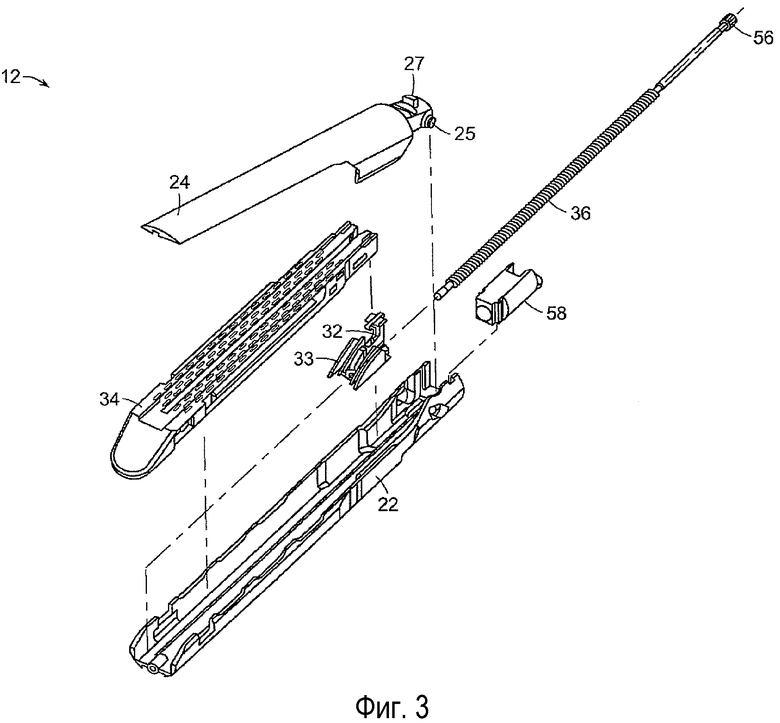
На Фиг.3 представлена блок-схема концевого зажима 12 в соответствии с различными вариантами осуществления настоящего изобретения. Как показано на фигуре, концевой зажим 12, помимо ранее указанного желоба 22 и упорной пластины 24, может включать режущий инструмент 32, салазки 33, съемный картридж со скобами 34, установленный в желобе 22, и винтовой вал 36. Режущий инструмент 32 может, например, являться скальпелем. Упорная пластина 24 может открываться и закрываться на оси шарнира 25, соединенной с проксимальным концом желоба 22. Упорная пластина 24 также может иметь на проксимальном конце язычок 27, вставленный в часть механизма закрытия для открытия и закрытия упорной пластины 24. Когда закрывающее пусковое устройство 18 приводится в действие, то есть пользователь инструмента 10 нажимает на него, упорная пластина 24 может поворачиваться вокруг оси шарнира 25 в фиксированное (или закрытое) положение, тем самым фиксируя ткань между желобом 22 и упорной пластиной 24. Если фиксация концевого зажима 12 является достаточной, оператор может привести в действие пусковой крючок 20, при этом скальпель 32 и салазки 33 перемещаются вдоль желоба 22, рассекая ткани, зафиксированные концевым зажимом 12. В результате движения салазок 33 вдоль желоба 22 скоби (не показаны) из картриджа 34 прошивают рассеченные ткани, упираясь в прижатую упорную пластину 24, которая сгибает их, фиксируя рассеченные ткани. В некоторых вариантах осуществления салазки 33 могут являться составным компонентом картриджа 34. Патент США № 6978921 «ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ ИНСТРУМЕНТ, ВКЛЮЧАЮЩИЙ ПУСКОВОЙ МЕХАНИЗМ С Е-ОБРАЗНЫМ ПОДВИЖНЫМ ЭЛЕМЕНТОМ» (авторы Shelton, IV et al.), который полностью включен в настоящий документ путем ссылки, дает более подробное описание таких двухтактных режущих и сшивающих инструментов. Салазки 33 могут являться частью картриджа 34, при этом, когда скальпель 32 втягивается после рассечения ткани, салазки 33 не втягиваются.
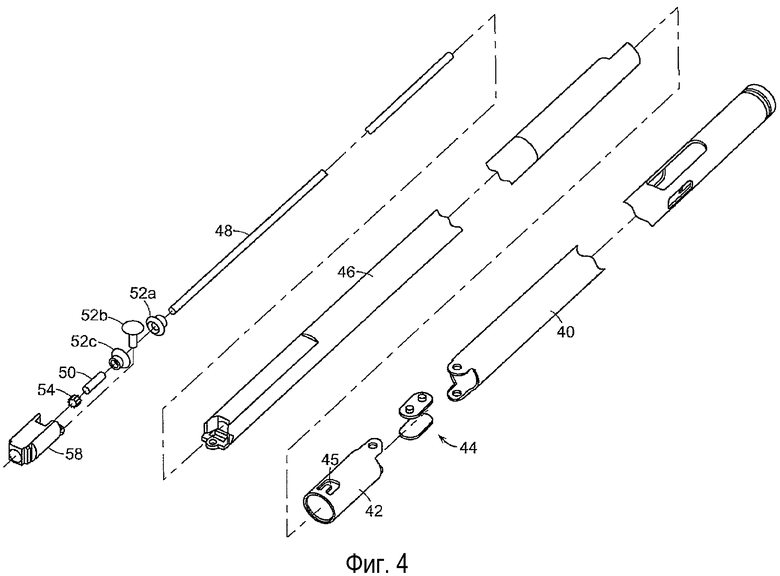
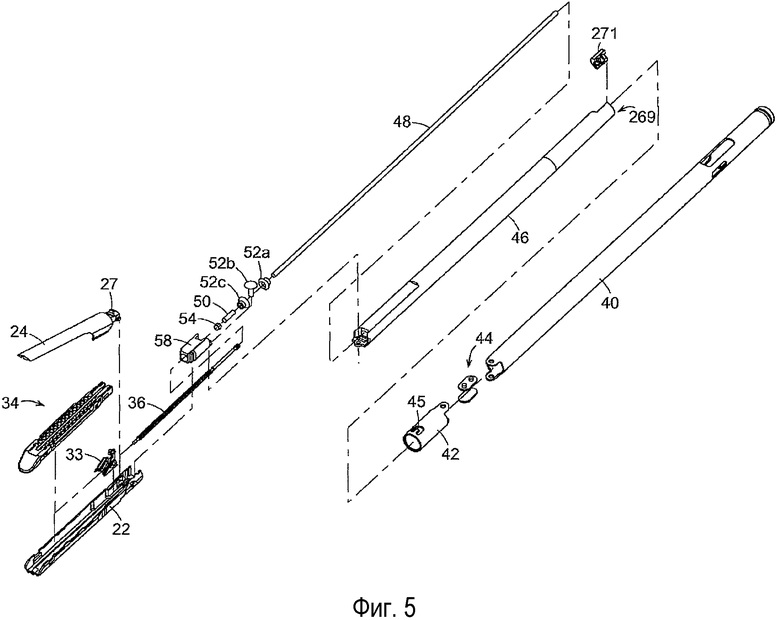
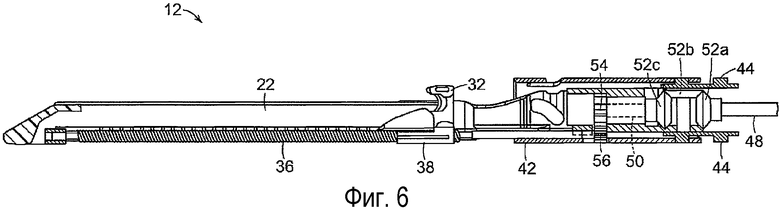
На Фиг.4-5 представлены в разобранном виде, а на Фиг.6 представлены в виде сбоку концевой зажим 12 и вал 8 в соответствии с различными неограничивающими вариантами осуществления изобретения. Как показано в проиллюстрированном варианте осуществления, вал 8 может включать проксимальную закрывающую трубку 40 и дистальную закрывающую трубку 42, связанные шарнирным звеном 44. Дистальная закрывающая трубка 42 имеет отверстие 45, в которое вставляют язычок 27 на упорной пластине 24, чтобы открывать и закрывать упорную пластину 24, как более подробно описано ниже. Непосредственно внутри закрывающих трубок 40 и 42 может быть расположена сердцевинная трубка 46. Непосредственно внутри сердцевинной трубки 46 может быть расположен основной вращательный (или проксимальный) приводной вал 48, который обменивается данными со вспомогательным (или дистальным) приводным валом 50 с помощью комплекта конических зубчатых колес 52. Вспомогательный приводной вал 50 соединен с приводным механизмом 54, который приводит в действие проксимальный приводной механизм 56 винтового вала 36. Вертикальное коническое зубчатое колесо 52 b может находиться и вращаться в отверстии 57 на дистальном конце проксимальной сердцевинной трубки 46. В дистальную сердцевинную трубку 58 могут быть вставлены вспомогательный приводной вал 50 и приводные механизмы 54 и 56. В совокупности основной приводной вал 48, вспомогательный приводной вал 50 и соединительный комплект (например, комплект конических зубчатых колес 52 a-c) в настоящем документе в некоторых случаях называют «комплектом основного приводного вала».
Приводной винт 36 посажен в подшипник 38, расположенный на дистальном конце желоба для скоб 22, что позволяет приводному винту 36 свободно вращаться относительно желоба 22. Винтовой вал 36 может стыковаться с резьбовым отверстием (не показано) скальпеля 32 таким образом, что при вращении вала 36 скальпель 32 перемещается дистально или проксимально (в зависимости от направления вращения) в желобе для скоб 22. Соответственно, когда основной приводной вал 48 при нажатии на пусковой крючок 20 вращается, комплект конических зубчатых колес 52 a-c вызывает вращение вспомогательного приводного вала 50, который в свою очередь, вследствие соединения приводных механизмов 54 и 56, вызывает вращение винтового вала 36, что заставляет продвигающий скальпель элемент 32 перемещаться вдоль желоба 22 и рассекать ткани, захваченные концевым зажимом. Салазки 33 могут быть выполнены, например, из пластика и могут иметь наклонную дистальную поверхность. Когда салазки 33 проходят желоб 22, наклоненная вперед поверхность может протолкнуть вверх или переместить скобы из картриджа для скоб через зажатую ткань, уперев их в упорную пластину 24. Упорная пластина 24 сгибает скобы, скрепляя таким образом рассеченные ткани. При втягивании скальпеля 32 обратно скальпель 32 и салазки 33 могут разъединяться, при этом салазки 33 остаются на дистальном конце желоба 22.
В проиллюстрированном варианте осуществления для приведения в действие режущего инструмента 32 в концевом зажиме используется вращающийся винтовой вал 36. Такой приводящий винтовой элемент может использоваться в вариантах осуществления, в которых используется вращающийся привод. В других вариантах осуществления для приведения в действие режущего инструмента может использоваться приводной элемент, совершающий продольное возвратно-поступательное движение. При использовании продольного возвратно-поступательного приводящего элемента концевой зажим 12 может быть соответствующим образом изменен. Более подробное описание таких концевых зажимов можно найти в патенте США № 7140528 и патенте США № 7000819, которые полностью включены в настоящий документ путем ссылки.
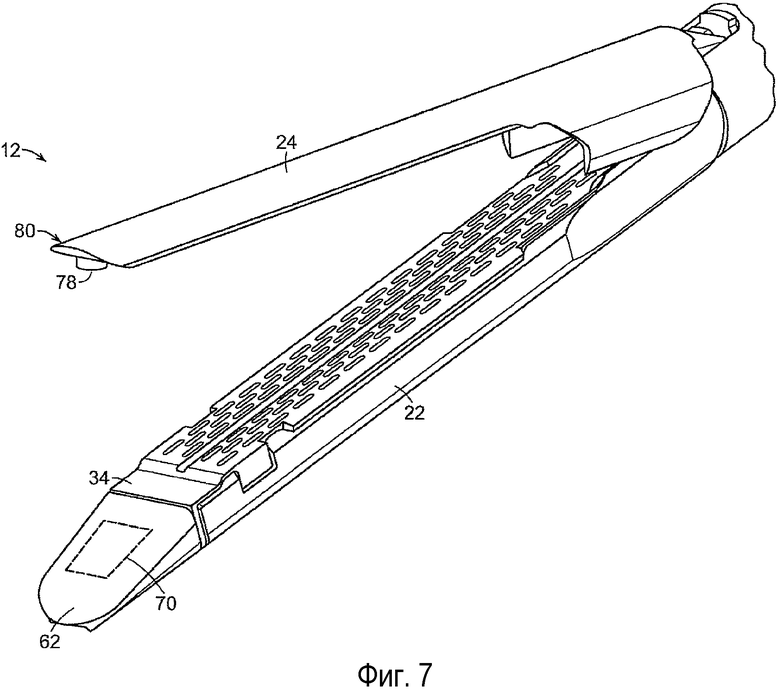
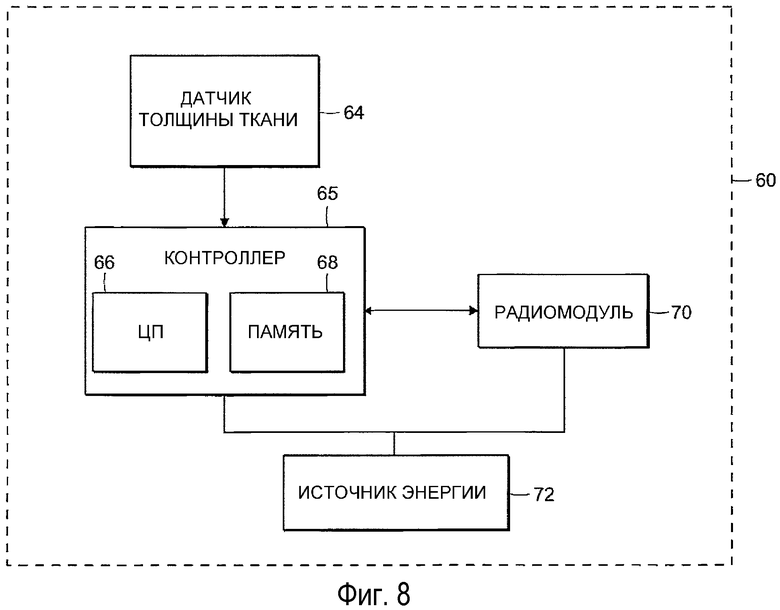
В соответствии с различными вариантами осуществления сменный картридж со скобами 34 может содержать модуль анализа толщины ткани, который определяет толщину ткани, зафиксированной в концевом зажиме 12 между желобом со скобами 22 (включающим картридж со скобами 34) и упорной пластиной 24. В соответствии с различными неограничивающими вариантами осуществления, как показано на Фиг.7, модуль анализа толщины ткани 60 может быть размещен на дистальном конце 62 картриджа со скобами 34 так, что он не препятствует прохождению скоб из картриджа со скобами 34 при наложении скоб. На Фиг.8 представлена блок-схема модуля анализа толщины ткани 60 в соответствии с различными вариантами осуществления настоящего изобретения. Как показано на Фиг.8, модуль анализа толщины ткани 60 может содержать датчик толщины ткани 64, контроллер 65, радиомодуль 70 и источник энергии 74. Контроллер 65 может содержать процессорное устройство (ЦП) 66 и устройство памяти 68. В различных вариантах осуществления датчик толщины ткани 64 может содержать датчик Холла, который определяет толщину ткани, зафиксированной в концевом зажиме 12 на основе величины магнитного поля магнита 78, расположенного, например, на дистальном конце 80 упорной пластины 24, как показано на Фиг.7. Когда хирург закрывает упорную пластину 24 путем прижимания закрывающего спускового крючка 18, магнит 78 поворачивается вниз и приближается к датчику 64, изменяя определяемое датчиком 64 магнитное поле при вращении упорной пластины 24 в закрытое (фиксированное) положение. Определяемая датчиком 64 сила магнитного поля магнита 78 характеризует расстояние между желобом 22 и упорной пластиной 24, которое в свою очередь характеризует толщину ткани, зафиксированной между желобом 22 и упорной пластиной 24, при переводе концевого зажима 12 в закрытое (фиксированное) положение.
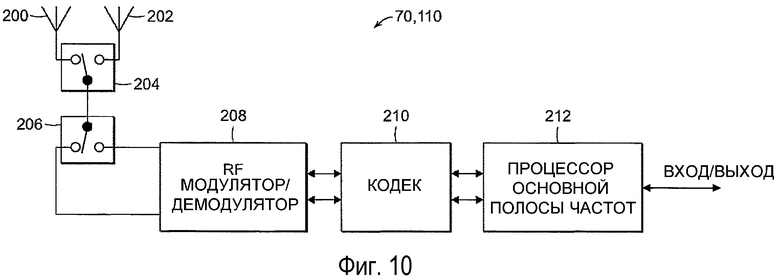
Устройство памяти 68 контроллера 65 может содержать один или несколько твердотельных накопителей постоянного запоминающего устройства (ПЗУ) и/или оперативного запоминающего устройства (ОЗУ). В различных вариантах осуществления ЦП 66 и устройства памяти 68 могут быть интегрированы в одну интегральную схему (ИС) или могут находиться в разных ИС. Устройство ПЗУ может содержать флеш-память. В устройстве ПЗУ может храниться код с инструкциями для выполнения ЦП 66 контроллера 65. Кроме того, в устройстве(-ах) ПЗУ могут храниться данные, характеризующие тип картриджа 34. Например, в устройстве(-ах) ПЗУ 68 могут храниться данные с указанием типа модели картриджа со скобами 34. Как более подробно указано ниже, расположенный в рукоятке 6 инструмента 10 цепь управления приводом может использовать информацию о толщине ткани и типе модели картриджа со скобами 34 для определения того, является ли зафиксированная в концевом зажиме 12 ткань слишком толстой или слишком тонкой, исходя из предусмотренного диапазона толщины ткани для конкретного картриджа со скобами 34. Радиомодуль 70 может представлять собой маломощный радиомодуль для двухстороннего обмена данными беспроводным образом с использованием протокола беспроводной передачи данных с расположенным в рукоятке 6 инструмента 10 цепь управления приводом. В соответствии с различными вариантами осуществления радиомодуль 70 может обмениваться данными с цепью управления приводом на частоте, при которой обеспечивается прохождение радиосигнала через ткани человека. Для обмена данными между радиомодулем 70 и цепью управления приводом может использоваться диапазон частот от 402 до 405 МГц, выделенный для обслуживания медицинских имплантатов (MICS), соответствующий промышленный/научный/медицинский диапазон (ISM), например, с центральной частотой 433 МГц или 915 МГц, либо любой другой диапазон частот, в котором обеспечивается прохождение радиосигнала через ткани человека. Источник энергии 74 может содержать соответствующую батарею для подачи энергии на компоненты модуля анализа толщины ткани 60, например, литий-ионную батарею или другую соответствующую батарею.
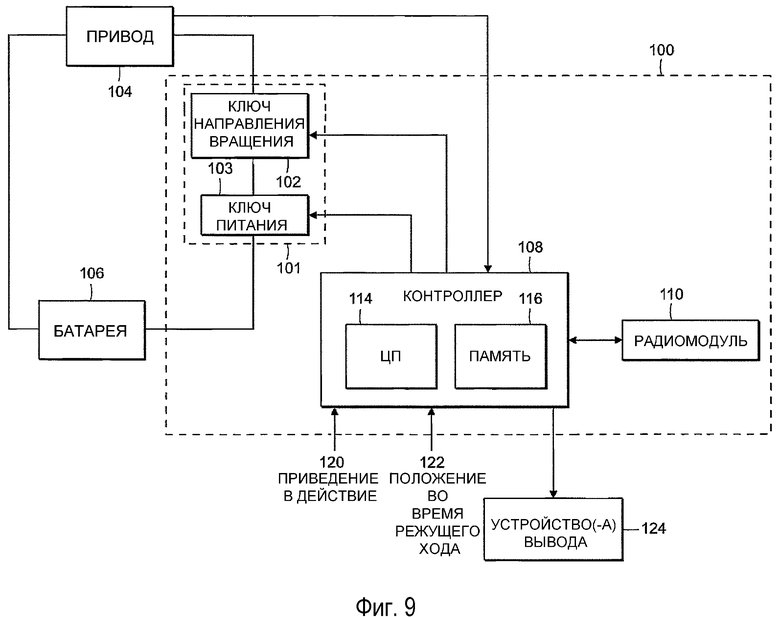
На Фиг.9 представлена блок-схема цепи управления приводом 100 в соответствии с различными неограничивающими вариантами осуществления настоящего изобретения. Цепь управления приводом 100 может быть расположен в рукоятке 6 инструмента 10, например, в непосредственной близости от привода 104 и батареи 106, и может быть отделен от модуля анализа толщины ткани 60 в концевом зажиме 12 валом 8. Таким образом, цепь управления приводом 100 может беспроводным образом обмениваться данными с модулем анализа толщины ткани 60, как описано в настоящем документе, хотя в других вариантах осуществления может использоваться и проводной канал обмена данными. Провода могут проходить через вал 8 и соединять цепь управления приводом 100 с модулем анализа толщины ткани 60 для обмена данными между ними.
Как показано на Фиг.9, цепь управления приводом 100 может содержать, в соответствии с различными вариантами осуществления, схему мощного ключа 101, контроллер 108 и радиомодуль 110. Радиомодуль 110 может обмениваться данными с радиомодулем 70 модуля анализа толщины ткани 60. Таким образом, радиомодуль 100 может представлять собой маломощный модуль, работающий на той же частоте, что и радиомодуль 70, и использующий тот же протокол передачи данных. Радиомодули 70 и 100, как показано на Фиг.10, в соответствии с различными вариантами осуществления, могут содержать передающую и принимающую антенны 200 и 202, антенный ключ 204, ключ режимов прием/передача 206, РЧ-модулятор/демодулятор 208, кодер/декодер (кодек) 210 и процессор основной полосы частот 212. Антенны 200 и 2002 цепи управления приводом 100 и модуля анализа толщины ткани 60 могут, например, являться микрополосковыми антеннами.
Схема мощного ключа 101 может содержать, в соответствии с различными вариантами осуществления, ключ питания 103 и ключ смены направления движения 102, которые обеспечивают подключение привода 104 к батарее 106 для подачи энергии от батареи 106 к приводу 104. В различных вариантах осуществления ключ смены направления движения 102 может содержать реле с двумя группами переключающих контактов, которые, в зависимости от полярности включения, определяют направление вращения привода 104 - вперед или назад. Контроллер 108 может управлять работой ключей 102 и 103. В различных вариантах осуществления контроллер 108 может быть реализован в виде микроконтроллера, который содержит процессорное устройство (ЦП) 114 и память 116. Память 116 может содержать твердотельные накопители ПЗУ и/или ОЗУ. Устройства ПЗУ могут содержать код с инструкциями для выполнения процессорным устройством 114. Процессорное устройство 114 и память 116 могут быть интегрированы в одну интегральную схему (ИС) или могут находиться в разных ИС. Контроллер 108 и радиомодуль 112 цепи управления приводом 100 могут питаться от батареи 106.
Как показано на Фиг.9, контроллер 108 может принимать ряд входных сигналов и, в зависимости от результатов обработки этих сигналов, может управлять ключами 102 и 103, обеспечивая надлежащее управление приводом 104 инструмента 10. Входные сигналы для контроллера 108 могут включать сигнал приведения в действие 120, сигнал положения режущего инструмента 122 и любые иные соответствующие сигналы. Сигнал приведения в действие 120 может отражать состояние пускового крючка 20, например, могут отражать, нажал ли хирург пусковой крючок 20 для начала режущего хода скальпеля в концевом зажиме 12 и отпустил ли хирург пусковой крючок 20 для окончания режущего хода. Сигнал приведения в действие 120 может поступать от датчика, такого как пропорциональный ключ, реагирующего на пусковой крючок 20. Сигнал положения режущего инструмента 122 может отражать текущее положение режущего инструмента 34 в концевом зажиме 12 во время режущего хода. Контроллер 108 может использовать этот сигнал для определения положения режущего инструмента 34 во время режущего хода, например, для определения того, находится ли режущий инструмент 34 около конца или в конце режущего хода. Когда режущий инструмент 34 приближается к концу режущего хода, контроллер 108 может снизить скорость вращения привода 104 и может изменить направление вращения привода 104 на обратное, когда режущий инструмент 34 достигает конца режущего хода. Контроллер 108 может также снизить скорость вращения привода 104, когда режущий инструмент приближается к исходному базовому положению у проксимального конца концевого зажима 12 при втягивании режущего инструмента, и может остановить привод 104 при полном втягивании режущего инструмента. Более подробное описание пропорционального ключа пускового крючка можно найти в следующих патентных документах США, которые полностью включены в настоящий документ путем ссылки: опубликованная заявка на патент № 2007/0175957, опубликованная заявка на патент № 2007/0175958 и опубликованная заявка на патент № 2007/0175959. Более подробное описание инструментов с датчиками положения режущего инструмента можно найти в следующих патентных документах США, которые полностью включены в настоящий документ путем ссылки: заявка на патент с регистрационным № 12/235782 и заявка на патент с регистрационным № 12/235972.
Разумеется, контроллер 108 также принимает входные данные от модуля анализа толщины ткани 60 через радиомодуль 110. Входные данные от модуля анализа толщины ткани 60 могут включать: (i) данные о толщине ткани по результатам измерения датчиком 64 модуля анализа толщины ткани 60 и (ii) данные о модели картриджа, характеризующие тип модели картриджа со скобами 34, которые хранятся в памяти 68 модуля анализа толщины ткани 60. На основе этих данных контроллер 108 цепи управления приводом 100 может определить, находится ли толщина ткани, зафиксированной в концевом зажиме 12, в предусмотренном диапазоне для конкретного картриджа со скобами 34. Если толщина ткани находится в предусмотренном диапазоне, контроллер 108 может направить на ключи 102 и 103 управляющие сигналы, обеспечивающие подачу энергии на привод 104 (при условии что остальные данные также соответствуют требуемым). С другой стороны, если толщина ткани выходит за пределы предусмотренного диапазона, контроллер 108 может перевести ключ 103 в такое положение, что энергия не будет поступать к приводу 104, блокируя работу привода 104 на основе анализа толщины ткани и предотвращая использование инструмента 10.
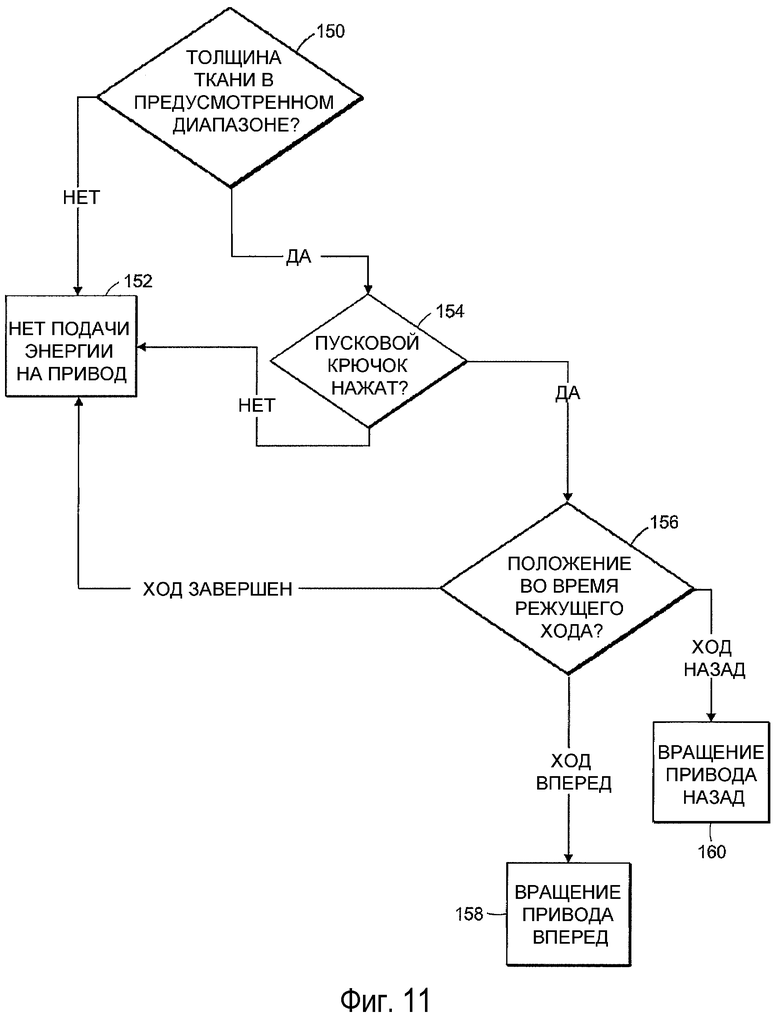
На Фиг.11 представлена схема процесса, выполняемого контроллером 108 в соответствии с различными вариантами осуществления настоящего изобретения. Процесс может быть реализован процессорным устройством 114 путем выполнения кода, который хранится в памяти 116. Процесс может начаться на шаге 150, на котором контроллер 108 определяет, находится ли толщина зафиксированной в концевом зажиме 12 ткани в предусмотренном диапазоне для конкретного картриджа со скобами 34. Контроллер 108 может определить это путем сравнения данных по толщине ткани с датчика 64 с предусмотренным диапазоном для конкретного картриджа со скобами 34. Контроллер 108 может определить предусмотренный диапазон толщины для картриджа со скобами, с помощью (i) данных по модели картриджа со скобами, переданных из модуля анализа толщины ткани 60, и (ii) таблицы (или иной структуры хранения данных) в памяти 116 контроллера, в которой хранятся данные, характеризующие предусмотренные диапазоны толщины для ряда типов моделей картриджей со скобами. Предусмотренный диапазон толщины может включать минимальную толщину и максимальную толщину для каждого типа моделей картриджа. Например, в разных типах моделей картриджей могут использоваться скобы различной длины. Более длинные скобы позволяют использовать большую толщину ткани в концевом зажиме по сравнению с картриджами, использующими более короткие скобы. Таким образом, для картриджей с более длинными скобами верхний предел допустимой толщины может быть больше, а для картриджей с более короткими скобами верхний предел допустимой толщины может быть меньше. Если толщина фиксированной ткани меньше минимальной или больше максимальной толщины для типа модели картриджа 34, толщина ткани выходит за пределы предусмотренного диапазона.
Если толщина ткани выходит за пределы предусмотренного диапазона толщины для картриджа со скобами 34, процесс переходит к шагу 152, на котором контроллер 108 переводит ключ питания 103 в открытое (непроводящее) состояние, так что энергия от батареи 106 не поступает к приводу 104. В результате привод 104 не принимает энергию, и его работа блокируется, тем самым предотвращая приведение в действие концевого зажима 12. С другой стороны, если толщина ткани находится в пределах предусмотренного диапазона толщины для картриджа со скобами 34, процесс переходит к шагу 154, на котором контроллер 108 по сигналу приведения в действие 120 определяет, нажат ли пусковой крючок 20. Если пусковой крючок не нажат, процесс переходит к шагу 152, и энергия от батареи 106 не поступает к приводу 104. С другой стороны, если пусковой крючок 20 нажат, процесс переходит к шагу 156, на котором контроллер 108 определяет положение режущего инструмента 34 во время режущего хода, исходя из сигнала положения режущего инструмента 22. Если положение режущего инструмента соответствует ходу вперед, процесс переходит к шагу 158, на котором контроллер 108 направляет управляющий сигнал на ключ смены направления движения 102, переводя ключ смены направления движения 102 в такое состояние, в котором энергия поступает на привод 104 в такой полярности, что привод 104 вращается вперед. И наоборот, если положение режущего инструмента во время режущего хода требует вращения привода 104 назад, процесс переходит к шагу 160, на котором контроллер 108 направляет управляющий сигнал на ключ смены направления движения 102, переводя ключ смены направления движения 102 в такое состояние, в котором энергия поступает на привод 104 в такой полярности, что привод 104 вращается назад. Процесс может выполняться описанным образом во время хирургической процедуры, связанной с использованием инструмента 10. Таким образом, если по какой-либо причине во время процедуры толщина ткани выходит за пределы диапазона, контроллер 108 может предпринять соответствующие действия в ответ на принимаемые в реальном времени от модуля анализа толщины ткани 60 данные по толщине ткани.
Возвращаясь к Фиг.9, контроллер 108 может также принимать сигнал обратной связи от привода 104, отражающий параметры состояния привода 104, такие как скорость вращения, направление вращение и т.д. Контроллер 108 может использовать эти данные для управления приводом 104. Контроллер 108 может также направлять управляющие сигналы на одно или несколько устройств вывода 124. Устройства вывода 124 могут содержать визуальные индикаторы, такие как оптические индикаторы (например, светодиоды) и/или звуковые индикаторы, такие как динамики. Например, устройства вывода 124 могут содержать несколько светодиодов, расположенных на внешней поверхности рукоятки 6 инструмента в поле зрения оператора устройства 10 при использовании инструмента 10. Один светодиод может загораться, если толщина фиксированной ткани в предусмотренном диапазоне толщины для картриджа со скобами, второй светодиод может загораться при выходе толщины фиксированной ткани за пределы предусмотренного диапазона толщины для картриджа со скобами, третий светодиод может загораться при вращении привода 104 вперед, четвертый светодиод может загораться при вращении привода 104 назад и т.д.
Кроме того, в других вариантах осуществления сигналы, передаваемые модулем анализа толщины ткани 60, могут приниматься приемником, отличным от цепи управления приводом 100. Например, как показано на Фиг.12, сигналы, передаваемые модулем анализа толщины ткани 60, могут приниматься блоком визуального отображения 160 и/или компьютерной системой 170. Блок визуального отображения 160 может содержать РЧ-радиомодуль 162 для обмена данными с модулем анализа толщины ткани 60. На дисплей 160 могут быть выведены изображения на основе данных, полученных от модуля анализа толщины ткани 60. Таким образом, хирург может в реальном времени видеть данные, характеризующие толщину зафиксированной ткани, в течение всей процедуры, связанной с использованием устройства 10. Блок визуального отображения 160 может содержать монитор, например, ЭЛТ-монитор, плазменный монитор, ЖК-монитор или любой другой соответствующий монитор для визуального отображения. Аналогичным образом, компьютерная система 170 может содержать РЧ-радиомодуль 172 для обмена данными с модулем анализа толщины ткани 60. Компьютерная система 170 может сохранять данные, полученные от модуля анализа толщины ткани 60, в устройстве памяти (например, в ПЗУ или на жестком диске) и может обрабатывать данные с помощью процессора.
Описанные в настоящем документе хирургические инструменты могут быть выполнены с возможностью утилизации после использования или могут быть выполнены с возможностью многоразового использования. Однако в обоих случаях после по меньшей мере одного использования устройство после соответствующей обработки и восстановления может использоваться повторно. Процедура восстановления может предусматривать любую комбинацию этапов разборки хирургического инструмента, после которой выполняется очистка и замена некоторых элементов и их последующая сборка. В частности, хирургический инструмент может быть разобран, и любое количество конкретных частей или компонентов устройства может быть выборочно заменено или удалено в любом сочетании. После очистки и/или замены отдельных частей хирургический инструмент может быть собран заново для последующего использования либо в специализированных организациях, занимающихся таким восстановлением, либо персоналом операционного блока непосредственно перед операцией. Специалистам в данной области будет понятно, что при восстановлении хирургического инструмента можно использовать различные способы разборки, чистки/замены и повторной сборки. Применение таких способов, как и восстановленный в итоге хирургический инструмент, входят в объем настоящего изобретения.
Предпочтительно перед выполнением хирургического вмешательства проводится обработка хирургического инструмента, описанного в настоящем документе. Во-первых, новый или уже использованный инструмент должен быть получен и при необходимости очищен. Затем инструмент может быть стерилизован. В одном способе стерилизации инструмент помещают в закрытый герметичный контейнер, такой как пластиковый пакет или пакет из материала Тайвек (TYVEK). Затем контейнер и инструмент помещаются в поле воздействия излучения, способного проникать в контейнер, такого как гамма-излучение, рентгеновское излучение или электроны высоких энергий. Излучение уничтожает бактерии, находящиеся на поверхности устройства и в контейнере. Стерилизованный таким образом инструмент может храниться в своем стерильном контейнере. Запечатанный контейнер сохраняет инструмент стерильным до его открытия в медицинском учреждении.
В различных вариантах осуществления некоторые компоненты инструмента 10 могут являться частью съемного заменяемого блока, который может вставляться в инструмент 10 после стерилизации инструмента 10. Например, как показано на Фиг.9, в различных вариантах осуществления батарея 106, контроллер 108 и радиомодуль 110 могут являться частью съемного заменяемого блока 140, который может вставляться в рукоятку 6 инструмента 10 после стерилизации инструмента. Например, съемный заменяемый блок 140 может быть асептически перенесен в инструмент 10 после стерилизации инструмента. В таком варианте осуществления блок 140 может иметь соответствующие внешние разъемы для подключения привода 104, схемы переключения 101, входных сигналов 120 и 122 и устройств вывода 124 и т.д. Таким образом, в таком варианте осуществления блок 140 может повторно использоваться со многими инструментами 10. Картридж 34 может быть утилизирован после каждого применения.
Приведенные выше варианты осуществления были описаны в контексте устройств типа линейного режущего эндоскопического аппарата с картриджем со скобами. Необходимо отметить, что модуль анализа толщины ткани 60 и соответствующая цепь управления 100 могут быть использованы в любом хирургическом инструменте, имеющем концевой зажим, используемый для фиксации ткани, в котором толщина зафиксированной ткани является важным фактором при проведении хирургической процедуры. Например, модуль анализа толщины ткани 60 и соответствующая цепь управления 100 могут быть использованы в круговом режущем эндоскопическом аппарате или режущем и сшивающем устройстве иного типа, таком как лапароскопические устройства. Кроме того, модуль анализа толщины ткани 60 и соответствующая цепь управления 100 не обязательно должны применяться в устройстве, использующем для скрепления рассеченных тканей скобы, но могут также применяться в инструментах с использованием других способов скрепления рассеченных тканей, как было указано выше. Кроме того, модуль анализа толщины ткани 60 и соответствующая цепь управления 100 не обязательно должны применяться в устройстве, использующем привод. В таких вариантах осуществления в инструменте 10 может использоваться механическая блокировка для предотвращения срабатывания инструмента. Один из таких механизмов блокировки описан в опубликованной заявке на патент США № 2006/0025811, которая полностью включена в настоящий документ путем ссылки.
Таким образом, в различных вариантах осуществления настоящее изобретение направлено на создание хирургического инструмента 10, который содержит фиксирующий ткань концевой зажим 12. В различных вариантах осуществления концевой зажим 12 содержит подвижный рабочий инструмент (например, режущий инструмент) 34 и модуль анализа толщины ткани 60, который определяет толщину ткани, зафиксированной в концевом зажиме 12. Хирургический инструмент 10 также содержит цепь управления 100, которая обменивается данными с модулем анализа толщины ткани, при этом цепь управления предотвращает приведение в действие рабочего инструмента, когда толщина ткани, зафиксированной в концевом зажиме, находится за пределами предусмотренного диапазона толщины. В соответствии с различными вариантами осуществления концевой зажим содержит противолежащие первую и вторую бранши 22 и 24, а также одноразовый картридж 34 (такой как одноразовый картридж со скобами), размещенный в первой бранше 22, при этом модуль анализа толщины ткани является частью одноразового картриджа. Кроме того, модуль анализа толщины ткани может содержать датчик Холла 64, а вторая бранша содержит магнит 78, при этом указанный датчик Холла определяет силу магнитного поля магнита, которая характеризует толщину ткани, зафиксированной в концевом зажиме, когда концевой зажим находится в закрытом (зафиксированном) положении. Кроме того, модуль анализа толщины ткани обеспечивает передачу данных в цепь управления, при этом данные включают в себя: (i) данные, характеризующие толщину ткани, зафиксированной в концевом зажиме, и (ii) данные, характеризующие тип одноразового картриджа.
Цепь управления может содержать процессорное устройство 114, запрограммированное для определения того, находится ли толщина зафиксированной в концевом зажиме ткани в диапазоне толщины, предусмотренном для одноразового картриджа, на основе данных, переданных модулем анализа толщины ткани в цепь управления, включая данные, характеризующие толщину ткани, зафиксированной в концевом зажиме, и данные, характеризующие тип одноразового картриджа. Кроме того, цепь управления может содержать твердотельный накопитель 116, в котором хранится информация о диапазонах толщины для одного или нескольких типов картриджей. Процессорное устройство может быть запрограммировано для определения того, находится ли толщина зафиксированной в концевом зажиме ткани в диапазоне толщины, предусмотренном для одноразового картриджа, на основе данных, переданных модулем анализа толщины ткани в цепь управления, путем сравнения данных, характеризующих толщину зафиксированной в концевом зажиме ткани, с сохраненными данными о диапазоне толщины для типа одноразового картриджа в концевом зажиме.
Кроме того, хирургический инструмент может дополнительно содержать электропривод 104, вращающий приводной вал 48 и 50, и батарею 106, подающую электроэнергию на электропривод. Цепь управления может предотвратить приведение в действие электропривода, когда толщина ткани, зафиксированной в концевом зажиме, находится за пределами предусмотренного диапазона толщины.
Кроме того, в различных вариантах осуществления модуль анализа толщины ткани беспроводном образом обменивается данными с цепью управления. Модуль анализа толщины ткани может содержать первый радиомодуль, а цепь управления может содержать второй радиомодуль, при этом первый радиомодуль беспроводным образом обменивается данными со вторым радиомодулем. Кроме того, модуль анализа толщины ткани может обмениваться данными с удаленным блоком визуального отображения или удаленной компьютерной системой.
Хотя настоящее изобретение было описано на примере конкретных вариантов осуществления, настоящее изобретение может быть изменено в рамках сущности и объема описания. Настоящая заявка охватывает все возможные вариации, способы применения или модификации изобретения, соответствующие его основным принципам. Кроме того, настоящая заявка охватывает такие отклонения от настоящего описания, которые подпадают под известную или общепринятую практику в области техники, к которой принадлежит настоящее изобретение.
Изобретение относится к медицине. Хирургический инструмент содержит фиксирующий ткань концевой зажим. Концевой зажим имеет модуль анализа толщины ткани, который определяет толщину ткани, зафиксированной в концевом зажиме. Хирургический инструмент содержит цепь управления, которая обменивается данными с модулем анализа толщины ткани. Цепь управления предотвращает приведение в действие рабочей части концевого зажима, когда толщина ткани, зафиксированной в концевом зажиме, находится за пределами предусмотренного диапазона толщины. 2 н. и 5 з.п. ф-лы, 12 ил.
1. Режущий и сшивающий хирургический инструмент, включающий в себя:
концевой зажим, при этом концевой зажим содержит:
первую и вторую противолежащие бранши, которые могут перемещаться между открытым и закрытым положением;
подвижный режущий инструмент, который рассекает ткань, зафиксированную между первой и второй браншами, когда бранши находятся в закрытом положении;
магнит на дистальном конце первой бранши;
одноразовый картридж во второй бранше, при этом одноразовый картридж содержит модуль анализа толщины ткани, который определяет толщину ткани, зафиксированной между первой и второй браншами, при этом модуль анализа толщины ткани содержит датчик Холла, который определяет силу магнитного поля магнита, при этом сила магнитного поля характеризует толщину ткани, зафиксированной между первой и второй браншами;
приводной вал, который приводит в движение режущий инструмент; и
цепь управления, которая обменивается данными с модулем анализа толщины ткани, при этом цепь управления содержит процессорное устройство, запрограммированное для определения того, находится ли толщина зафиксированной в концевом зажиме ткани в диапазоне толщины, предусмотренном для одноразового картриджа, на основе данных, переданных модулем анализа толщины ткани в цепь управления приводом, при этом цепь управления предотвращает приведение в действие приводного вала, когда
толщина ткани, зафиксированной в концевом зажиме, находится за пределами предусмотренного диапазона толщины.
2. Хирургический инструмент по п. 1, в котором модуль анализа толщины ткани обеспечивает передачу данных в цепь управления, при этом данные включают в себя:
данные, характеризующие толщину ткани, зафиксированной в концевом зажиме; и
данные, характеризующие тип одноразового картриджа.
3. Хирургический инструмент по п. 2, в котором цепь управления содержит твердотельный накопитель, при этом в твердотельном накопителе хранится информация о диапазоне толщины для одного или более типов картриджей.
4. Хирургический инструмент по п. 3, в котором процессорное устройство запрограммировано для определения того, находится ли толщина зафиксированной в концевом зажиме ткани в диапазоне толщины, предусмотренном для одноразового картриджа, на основе данных, переданных модулем анализа толщины ткани в цепь управления, путем сравнения данных, характеризующих толщину зафиксированной в концевом зажиме ткани, с сохраненными данными о диапазоне толщины для типа одноразового картриджа в концевом зажиме.
5. Хирургический инструмент по п. 1, в котором модуль анализа толщины ткани беспроводным образом обменивается данными с цепью управления.
6. Хирургический инструмент по п. 1, в котором инструмент дополнительно содержит:
электропривод, который приводит в движение приводной вал; и
батарею, подающую электроэнергию на привод;
при этом цепь управления предотвращает приведение в действие привода, когда толщина ткани, зафиксированной в концевом зажиме, находится за пределами предусмотренного диапазона толщины для одноразового картриджа.
7. Хирургический инструмент, включающий в себя:
фиксирующий ткань концевой зажим, содержащий:
первую и вторую противолежащие бранши;
подвижную рабочую часть;
картридж, размещенный в первой бранше;
датчик толщины на картридже, который определяет толщину ткани, зафиксированной между первой и второй браншами;
микроконтроллер, который обменивается данными с датчиком толщины, при этом микроконтроллер хранит в памяти данные, характеризующие тип картриджа; и
радиомодуль, который обменивается данными с микроконтроллером; и
цепь управления, которая обменивается данными с радиомодулем,
при этом: цепь управления принимает данные от радиомодуля, причем данные включают в себя:
данные, характеризующие толщину ткани, зафиксированной в концевом зажиме; и
данные, характеризующие тип одноразового картриджа;
при этом цепь управления определяет, находится ли толщина зафиксированной в концевом зажиме ткани в диапазоне толщины, предусмотренном для одноразового картриджа, на основе данных, переданных в цепь управления; и
цепь управления предотвращает приведение в действие подвижной рабочей части, когда толщина ткани, зафиксированной в концевом зажиме, находится за пределами предусмотренного диапазона толщины для одноразового картриджа.
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| Аппарат для механического сшивания тканей | 1978 |
|
SU674747A1 |
| Ушиватель органов | 1987 |
|
SU1509051A1 |

