Область техники
Изобретение относится к транспортному средству, в котором только два колеса с одной стороны, из двух колес с передней стороны и двух колес с задней стороны, каждое снабжено амортизатором, имеющим механизм, который изменяет коэффициент демпфирования, который служит в качестве опорного значения демпфирующего усилия, оказываемого на перемещение сближения и отдаления подрессоренной части и неподрессоренной части.
Уровень техники
Системы подвески для транспортных средств включают в себя системы подвески, которые снабжены амортизаторами, соответствующими соответствующим колесам, причем каждый амортизатор имеет механизм изменения коэффициента демпфирования, который изменяет коэффициент демпфирования, который служит в качестве опорного значения демпфирующего усилия, оказываемого на перемещение сближения и отдаления подрессоренной части и неподрессоренной части. Например, система, раскрытая в патентном документе 1, является системой подвески, в которой соответствующие амортизаторы гидравлического типа, коэффициент демпфирования которых может быть изменен посредством оказания сопротивления по отношению к циркуляции рабочей текучей среды, сопровождающей скольжение поршня в корпусе, и изменения оказываемого сопротивления предоставляются на каждом из четырех колес. В последние годы были изучены системы подвески, в которых коэффициенты демпфирования могут быть изменены через предоставление возможности управления демпфирующим усилием посредством предоставления, на соответствующих колесах, амортизаторов электромагнитного типа, являющихся устройствами, которые, полагаясь на усилие, формируемое электромагнитным мотором, формируют усилие, которое воздействует на подрессоренную часть и на неподрессоренную часть, в направлении, в котором подрессоренная часть и неподрессоренная часть перемещаются ближе или дальше друг от друга.
Патентный документ 1: Публикация заявки на патент Японии №2009-274644.
Сущность изобретения
Как стабильность при рулении, так и характеристика плавности хода, которые являются взаимоисключающими, могут быть улучшены в транспортных средствах, оборудованных такой системой подвески, в которой амортизаторы, имеющие механизм изменения коэффициента демпфирования, обеспечиваются соответственно всем четырем колесам. Однако система подвески, раскрытая в патентном документе 1, то есть система подвески, в которой амортизаторы гидравлического типа, имеющие механизм изменения коэффициента демпфирования, предоставляются соответственно всем четырем колесам, является сравнительно дорогостоящей, и, таким образом, трудно оснастить все транспортные средства такой системой. В свете вышеприведенных причин задачей изобретения является создание транспортного средства, в котором как стабильность при рулении, так и характеристика плавности хода улучшаются сравнительно недорогим образом.
Для решения вышеупомянутой задачи транспортное средство характеризуется тем, что жесткость пружины каждой из четырех пружин подвески и распределенная нагрузка на каждое из четырех колес регулируются так, что резонансная частота колебаний подрессоренных масс, соответствующая двум передним колесам, и резонансная частота колебаний подрессоренных масс, соответствующая двум задним колесам, отличаются друг от друга; и из четырех амортизаторов только два амортизатора, которые обеспечиваются соответственно для двух колес с пониженной резонансной частотой колебаний подрессоренных масс, среди двух передних колес и двух задних колес, имеют, соответственно, механизмы изменения коэффициента демпфирования, которые изменяют коэффициент демпфирования, который служит в качестве опорного значения величины демпфирующего усилия, формируемого двумя амортизаторами.
Более низкая резонансная частота колебаний подрессоренных масс переводится в большее перемещение между соответствующей подрессоренной частью и неподрессоренной частью. В транспортном средстве управляются только амортизаторы, соответствующие двум колесам с более низкой резонансной частотой колебаний подрессоренных масс из передних колес и задних колес, то есть амортизаторы, соответствующие двум колесам, в которых перемещение подрессоренной части и неподрессоренной части имеет тенденцию быть большим. Поведение всего кузова транспортного средства может эффективно ограничиваться посредством управления демпфирующим усилием, оказываемым на сравнительно большое перемещение подрессоренных частей, соответствующих этим двум колесам. В транспортном средстве, следовательно, можно улучшать как стабильность при рулении, так и характеристику плавности хода, которые являются взаимноисключающими, сравнительно недорогим образом, поскольку амортизаторы, коэффициент демпфирования которых может быть изменен, предоставляются не на всех колесах.
Различные аспекты изобретения в заявке, которые, как полагается, могут быть предметом формулы изобретения (далее в данном документе также называемые "заявляемым изобретением") будут проиллюстрированы и объяснены далее. Аналогично формуле изобретения далее изложены аспекты, разделенные на пронумерованные разделы, которые могут ссылаться на номера других разделов при необходимости. Это делается для того, чтобы упрощать понимание заявляемого изобретения, и комбинации составляющих элементов, которые составляют изобретение, не предполагают быть ограниченными составляющими элементами, изложенными в различных разделах ниже. То есть заявляемое изобретение должно интерпретироваться с учетом раскрытия, ассоциированного с каждым разделом, и раскрытия вариантов осуществления и т.д. Пока эта интерпретация соблюдается, аспекты, получающиеся в результате дополнительного добавления других составных элементов к аспектам соответствующих разделов, а также аспекты, получающиеся в результате удаления некоторых составных элементов из аспектов соответствующих разделов, могут аналогично составлять аспекты заявляемого изобретения. Разделы (1)-(11) ниже соответствуют, соответственно, пп. 1-11 формулы изобретения.
(1) Транспортное средство включает в себя:
четыре колеса, которые являются двумя передними колесами, расположенными с передней стороны транспортного средства, и двумя задними колесами, расположенными с задней стороны транспортного средства;
четыре пружины подвески, предусмотренные, соответственно, для четырех колес, причем каждая из пружин подвески упруго соединяет подрессоренную часть и неподрессоренную часть, соответствующие каждой пружине подвески; и
четыре амортизатора, предусмотренных, соответственно, для четырех колес, при этом каждый из амортизаторов формирует демпфирующее усилие, оказываемое на перемещение сближения и отдаления подрессоренной части и неподрессоренной части, соответствующих каждому амортизатору,
причем жесткость пружины каждой из четырех пружин подвески и распределяемая нагрузка на каждое из четырех колес регулируются так, что резонансная частота колебаний подрессоренных масс, соответствующая двум передним колесам, и резонансная частота колебаний подрессоренных масс, соответствующая двум задним колесам, отличаются друг от друга;
при этом из четырех амортизаторов только два амортизатора, которые предоставляются соответственно для двух колес с пониженной резонансной частотой колебаний подрессоренных масс, из двух передних колес и двух задних колес, имеют, соответственно, механизмы изменения коэффициента демпфирования, которые изменяют коэффициент демпфирования, который служит в качестве опорного значения величины демпфирующего усилия, формируемого двумя амортизаторами.
Как задано посредством формулы ниже, резонансная частота со колебаний подрессоренных масс определяется по жесткости K пружины для пружины подвески и по массе m подрессоренной части (получающейся в результате деления распределенной нагрузки на кузов транспортного средства, поддерживаемой соответствующим колесом, на ускорение свободного падения):
ω=(K/m)½
В транспортном средстве, изложенном в этом разделе, соответственно, распределенная нагрузка на два передних колеса и жесткость пружины для пружин подвески, соответствующих передним колесам, а также распределенная нагрузка на два задних колеса и жесткость пружины для пружин подвески, соответствующих задним колесам, каждая регулируются таким образом, что резонансная частота колебаний подрессоренных масс, соответствующая двум передним колесам (далее в данном документе также называемая "резонансной частотой колебаний подрессоренных масс на стороне передних колес"), и резонансная частота колебаний подрессоренных масс, соответствующая двум задним колесам (далее в данном документе также называемая "резонансной частотой колебаний подрессоренных масс на стороне задних колес"), отличаются друг от друга. Перемещение кузова транспортного средства, например, после проезда по неровностям на поверхности дороги, имеет тенденцию становиться более ощутимым по мере того, как резонансная частота колебаний подрессоренных масс становится ниже.
В транспортном средстве, изложенном в этом разделе, коэффициент демпфирования может быть изменен только в этих двух амортизаторах, соответствующих двум колесам с пониженной резонансной частотой колебаний подрессоренных масс, из двух передних колес и двух задних колес. В транспортном средстве, изложенном в этом разделе, в частности, предоставляется возможность управления демпфирующим усилием между неподрессоренной частью и подрессоренной частью стороны кузова транспортного средства, из вариантов передней стороны и задней стороны, при котором поведение кузова транспортного средства является более выраженным. Демпфирующее усилие, созданное амортизаторами, коэффициент демпфирования которых может быть изменен (далее в данном документе также называемыми "амортизаторами с переменным коэффициентом демпфирования"), не оказывается, если нет относительного перемещения между подрессоренной частью и неподрессоренной частью. То есть поведение всего кузова транспортного средства может сдерживаться (контролироваться) до большей степени при управлении демпфирующим усилием (коэффициентом демпфирования), оказываемым на перемещение между подрессоренной частью и неподрессоренной частью для большого перемещения кузова транспортного средства, чем при управлении демпфирующим усилием (коэффициентом демпфирования), оказываемым на перемещение между подрессоренной частью и неподрессоренной частью для небольшого перемещения кузова транспортного средства. Действие, при помощи которого демпфирующее усилие, созданное амортизаторами, ограничивает перемещение кузова транспортного средства, является более выраженным, когда перемещение кузова транспортного средства больше, чем когда перемещение небольшое. В транспортном средстве этого раздела, следовательно, предоставляются только два амортизатора с переменным коэффициентом демпфирования. Однако поведение всего кузова транспортного средства может быть эффективно сглажено через ограничение посредством двух амортизаторов с переменным коэффициентом демпфирования, перемещения подрессоренной части, в которой перемещение кузова транспортного средства имеет тенденцию быть большим. В транспортном средстве, изложенном в этом разделе, только два амортизатора из четырех амортизаторов имеют механизм изменения коэффициента демпфирования. Соответственно, можно улучшать как стабильность при рулении, так и характеристику плавности хода, которые являются взаимно исключающими, сравнительно недорогим образом.
Структура и конфигурация "амортизатора с переменным коэффициентом демпфирования" конкретно не ограничиваются. То есть структура и конфигурация "механизма изменения коэффициента демпфирования", изложенные в этом параграфе, конкретно не ограничиваются. Хотя объяснено более подробно дальше, амортизатор с переменным коэффициентом демпфирования, который используется, может быть, например, амортизатором гидравлического типа, коэффициент демпфирования которого может изменяться через изменение величины сопротивления, которое оказывается по отношению к циркуляции рабочей текучей среды, или амортизатором электромагнитного типа, коэффициент демпфирования которого может быть изменен посредством предоставления возможности формирования произвольного демпфирующего усилия, на основе усилия, сформированного электромагнитным мотором. Амортизатор с переменным коэффициентом демпфирования может быть амортизатором, коэффициент демпфирования которого может изменяться непрерывно, или амортизатором, коэффициент демпфирования которого может изменяться ступенчато по множеству заданных значений. Два амортизатора, исключая вышеупомянутые амортизаторы с переменным коэффициентом демпфирования, из вышеупомянутых четырех амортизаторов, являются амортизаторами, коэффициент демпфирования которых не может быть изменен. С точки зрения конфигурирования транспортного средства недорогим образом последние являются традиционными амортизаторами гидравлического типа, которые широко используются в обычных транспортных средствах.
(2) Транспортное средство согласно разделу (1), в котором
жесткость пружины каждой из четырех пружин подвески и распределенная нагрузка на каждое из четырех колес регулируются так, что резонансная частота колебаний подрессоренных масс, соответствующая двум задним колесам, ниже резонансной частоты колебаний подрессоренных масс, соответствующей двум передним колесам; и
только два амортизатора, соответствующие двум задним колесам, из четырех амортизаторов, имеют механизмы изменения коэффициента демпфирования соответственно.
В обычных транспортных средствах резонансная частота колебаний подрессоренных масс на стороне задних колес задается более высокой, чем резонансная частота колебаний подрессоренных масс на стороне передних колес, для того, чтобы предотвращать увеличения продольных колебаний кузова транспортного средства, которые возникают, когда транспортное средство проезжает по неровностям на поверхности дороги. В транспортном средстве, изложенном в этом разделе, наоборот, резонансная частота колебаний подрессоренных масс на стороне задних колес задается более низкой, чем резонансная частота колебаний подрессоренных масс на стороне передних колес. В частности, транспортное средство, изложенное в этом параграфе, конфигурируется так, что перемещение подрессоренной части на стороне задних колес является сравнительно более значительным, и амортизаторы с изменяемым коэффициентом демпфирования предоставляются, соответственно, для задних колес. Множество обычных транспортных средств имеют двигатель, расположенный с передней стороны. В таких транспортных средствах на вес подрессоренной части на стороне передних колес незначительно влияют пассажиры или перевозимый груз, и он не колеблется слишком сильно. Вес подрессоренной части на стороне задних колес, наоборот, колеблется значительно в зависимости от пассажиров и перевозимого груза. В транспортном средстве этого раздела амортизаторы с переменным коэффициентом демпфирования предоставляются на задних колесах; соответственно, поведение кузова транспортного средства может более эффективно ограничиваться, даже при колебании веса подрессоренной части на стороне задних колес, чем в транспортном средстве, имеющем конфигурацию, в которой амортизаторы с переменным коэффициентом демпфирования предоставляются на передних колесах.
(3) Транспортное средство согласно разделу (1) или разделу (2), в котором каждый из двух амортизаторов, имеющих механизм изменения коэффициента демпфирования, из четырех амортизаторов, является амортизатором гидравлического типа, имеющим:
(A) корпус, который соединяется с одной из подрессоренной части и неподрессоренной части и который содержит рабочую текучую среду;
(B) поршень, который делит внутреннее пространство корпуса на две камеры для рабочей текучей среды и который может скользить через внутреннее пространство корпуса;
(C) шток поршня, который имеет одну концевую часть, соединенную с поршнем, и другую концевую часть, выступающую из корпуса и соединяющуюся с другой частью из подрессоренной части и неподрессоренной части;
(D) механизм, обеспечивающий циркуляцию рабочей текучей среды, который предусмотрен в поршне и который обеспечивает циркуляцию рабочей текучей среды между двумя камерами для рабочей текучей среды, получающихся в результате скольжения поршня, в состоянии оказания сопротивления по отношению к циркуляции; и
(E) механизм изменения сопротивления потока, который функционирует как механизм изменения коэффициента демпфирования посредством конфигурирования, чтобы изменять коэффициент демпфирования через изменение величины сопротивления, которое механизм, обеспечивающий циркуляцию рабочей текучей среды, оказывает по отношению к циркуляции рабочей текучей среды.
(4) Транспортное средство согласно разделу (1) или разделу (2), в котором каждый из двух амортизаторов, имеющих механизм изменения коэффициента демпфирования, из четырех амортизаторов, является амортизатором электромагнитного типа, который имеет электромагнитный мотор и который формирует усилие сближения и отдаления, которое является усилием, которое основано на усилии, формируемом электромагнитным мотором, и которое оказывается на подрессоренную часть и неподрессоренную часть, соответствующую амортизатору, чтобы передвигать подрессоренную часть и неподрессоренную часть ближе или дальше друг от друга; и
транспортное средство имеет механизм изменения коэффициента демпфирования посредством конфигурирования так, что при создании усилия сближения или отдаления в качестве демпфирующего усилия демпфирующее усилие определяется произведением скорости перемещения сближения и отдаления подрессоренной части и неподрессоренной части и коэффициента усиления, соответствующего этому, и посредством конфигурирования так, что коэффициент усиления может изменяться.
Аспект, изложенный в вышеприведенных двух разделах, осуществляется как амортизатор с переменным коэффициентом демпфирования.
(5) Транспортное средство согласно разделу (3) или разделу (4), в котором каждый из двух амортизаторов, исключая два амортизатора, имеющих механизм изменения коэффициента демпфирования, из четырех амортизаторов, является амортизатором гидравлического типа, в котором коэффициент демпфирования не может быть изменен.
В аспекте, изложенном в этом разделе, так называемые традиционные амортизаторы гидравлического типа используются в качестве двух амортизаторов, коэффициент демпфирования которых не может быть изменен. То есть амортизаторы различных структур и конфигураций, которые используются в обычных транспортных средствах, могут быть здесь использованы.
(6) Транспортное средство по любому из разделов (1)-(5), при этом транспортное средство включает в себя устройство управления, которое управляет механизмом изменения коэффициента демпфирования каждого из двух амортизаторов из четырех амортизаторов; и устройство управления:
делит колебание, формируемое в кузове транспортного средства, на компонент вертикального колебания, компонент поперечного колебания и компонент продольного колебания, каждый из которых является одним компонентом колебания, определяет целевое демпфирующее усилие, которое является демпфирующим усилием, которое должно быть создано каждым из четырех амортизаторов, в соответствии с правилом управления, так что каждый из компонентов колебания демпфируется четырьмя амортизаторами согласованно, и
управляет механизмом изменения коэффициента демпфирования каждого из двух амортизаторов, из четырех амортизаторов с тем, чтобы выполнять изменение в коэффициенте демпфирования согласно соответствующему целевому демпфирующему усилию.
Аспект, изложенный в этом разделе, осуществляется в форме схемы управления механизма изменения коэффициента демпфирования. Схема управления, используемая в транспортном средстве, которое снабжено четырьмя амортизаторами с переменным коэффициентом демпфирования, соответствующими каждому из четырех колес, используется как есть в транспортном средстве аспекта в этом разделе. Транспортное средство конфигурируется таким образом, что перемещение подрессоренной части, соответствующей амортизаторам с переменным коэффициентом демпфирования, является более значительным, а перемещение подрессоренной части, соответствующей амортизаторам, коэффициент демпфирования которых не может быть изменен, - менее значительным. Поведение кузова транспортного средства может в достаточной степени ограничиваться даже при использовании как есть схемы управления, которая спроектирована традиционным образом, таким как вышеупомянутая. Аспект в этом разделе, следовательно, обеспечивает легкое конфигурирование транспортного средства, поскольку в таком случае не нужно проектировать специализированную схему управления транспортного средства.
Колебание кузова транспортного средства может рассматриваться как получающееся в результате компонента вертикального колебания, являющегося колебанием центра тяжести кузова транспортного средства в вертикальном направлении, компонента поперечного колебания, являющегося вращательным колебанием вокруг оси продольного направления, которая проходит через центр тяжести кузова транспортного средства, и компонента продольного колебания, являющегося вращательным колебанием вокруг оси поперечного направления, которая проходит через центр тяжести кузова транспортного средства. В качестве "правила управления", изложенного в этом разделе, может быть использовано, например, правило, которое подразумевает определение компонентов силы, необходимых для всего кузова транспортного средства, для демпфирования каждого из компонента вертикального колебания, компонента поперечного колебания и компонента продольного колебания, распределяющее затем каждый из компонентов на четыре амортизатора и суммирующее компоненты для каждого амортизатора, чтобы определять, таким образом, соответствующее целевое демпфирующее усилие для каждого из четырех амортизаторов. Как объяснено подробно ниже, например, может быть спроектирована система управления с обратной связью, в которой вертикальное ускорение, поперечное ускорение и продольное ускорение используются в качестве выходных данных управления, и может быть принято правило управления, согласно которому целевые демпфирующие усилия определяются таким образом, что вышеупомянутые ускорения ограничиваются.
(7) Транспортное средство согласно разделу (6), в котором устройство управления конфигурируется, чтобы определять, в качестве правила управления, целевое демпфирующее усилие при использовании управления с обратной связью по состоянию, имеющего в качестве выходных данных управления вертикальное ускорение, которое является ускорением кузова транспортного средства в вертикальном направлении, поперечного ускорения, которое является угловым ускорением кузова транспортного средства вокруг оси продольного направления, и продольного ускорения, которое является угловым ускорением кузова транспортного средства вокруг оси поперечного направления, с тем, чтобы ограничивать вертикальное ускорение, поперечное ускорение и продольное ускорение.
Правило управления для определения целевых демпфирующих усилий ограничивается в аспекте, изложенном в этом разделе. Например, объект управления (модель управления), в котором нелинейные части коэффициентов демпфирования амортизаторов выбираются в качестве входных данных управления, и вертикальное ускорение, поперечное ускорение и продольное ускорение выбираются в качестве выходных данных управления, может быть постулирован в качестве правила управления, изложенного в этом параграфе. Затем может быть использована система управления, которая предназначена для такого объекта управления. Эта система управления может быть создана в соответствии с теорией H∞-управления, в которой влияние неопределенности объекта управления ограничивается посредством обработки неопределенных фрагментов объекта управления как сигналов помехи. Здесь теория H∞-управления является средством проектирования для уменьшения нормы передаточной функции, из возмущающего входного воздействия в выходную оценку (нормы для оценки передаточной функции), с вышеупомянутым объектом управления в качестве цели, посредством передачи соответствующей обратной связи от выхода управления на вход управления.
(8) Устройство согласно разделу (7), в котором правило управления соответствует теории нелинейного H∞-управления.
Аспект, изложенный в этом разделе, предусматривает транспортное средство, имеющее превосходную характеристику демпфирования и в котором целевое демпфирующее усилие может управляться непрерывно, даже с помощью амортизаторов гидравлического типа, которые не могут создавать толкающее усилие, поскольку целевое демпфирующее усилие определяется в диапазоне сил, которые могут быть сформированы амортизаторами гидравлического типа. Аспект в этом разделе, как объяснено выше, подходит для амортизаторов гидравлического типа, коэффициент демпфирования которых может быть изменен через изменение величины сопротивления, оказываемого в отношении циркуляции рабочей текучей среды.
(9) Транспортное средство согласно разделу (7) или разделу (8), в котором правило управления, согласно которому управление с обратной связью по состоянию выполняется, устанавливается на основе уравнений состояния, которые получаются на основе уравнения движения кузова транспортного средства в вертикальном направлении, уравнения движения кузова транспортного средства вокруг оси продольного направления и уравнения движения кузова транспортного средства вокруг оси поперечного направления.
Аспект, изложенный в этом параграфе, осуществляется как способ для определения объекта управления, в котором вертикальное ускорение, поперечное ускорение и продольное ускорение являются выходными значениями управления.
(10) Транспортное средство согласно любому из разделов (7)-(9), в котором устройство управления конфигурируется, чтобы использовать, в качестве параметров состояния при управлении с обратной связью по состоянию, (a) ускорение подрессоренных масс, которое является ускорением подрессоренной части в вертикальном направлении, (b) скорость подрессоренных масс, которая является скоростью подрессоренной части в вертикальном направлении, (c) относительную величину смещения между подрессоренной частью и неподрессоренной частью в направлении приближения и отдаления, и (d) относительную скорость между подрессоренной частью и неподрессоренной частью в направлении приближения и отдаления, соответствующие каждому из четырех колес.
Входные значения, используемые для управления амортизаторами с переменным коэффициентом демпфирования, ограничиваются в аспекте, изложенном в этом разделе. То есть показатели, требуемые для определения целевого демпфирующего усилия, ограничиваются. В аспекте этого раздела ускорение подрессоренных масс может быть обнаружено датчиком, который обнаруживает вертикальное ускорение, являющееся ускорением подрессоренной части в вертикальном направлении; скорость подрессоренных масс может быть получена посредством интегрирования результата обнаружения. Величина относительного смещения может быть обнаружена датчиком, который обнаруживает расстояние между подрессоренной частью и неподрессоренной частью в направлении передвижения ближе или дальше друг от друга; относительная скорость может быть получена посредством интегрирования результата обнаружения.
(11) Транспортное средство согласно разделу (10), при этом транспортное средство имеет три датчика вертикального ускорения, включающих в себя два датчика, которые обнаруживают вертикальное ускорение подрессоренных масс, которое является ускорением подрессоренной части в вертикальном направлении, соответствующим каждому из двух передних колес, и датчик, который обнаруживает ускорение, в вертикальном направлении, фрагмента кузова транспортного средства, расположенного между двумя задними колесами; и
устройство управления конфигурируется, чтобы вычислять ускорение подрессоренных масс и скорость подрессоренных масс, соответствующие каждому из двух задних колес, на основе результатов обнаружения трех датчиков вертикального ускорения.
Перемещение плоскости, то есть перемещение кузова транспортного средства, может быть оценено по данным результатам обнаружения трех датчиков вертикального ускорения. Аспект, изложенный в этом разделе, подразумевает конфигурацию, в которой вертикальное ускорение подрессоренных масс и скорость подрессоренных масс для двух задних колес оцениваются, полагаясь на этот признак. Ускорение подрессоренных масс подрессоренных частей, соответствующих каждому из двух передних колес, может быть получено посредством интегрирования результатов обнаружения датчиков, которые обнаруживают вертикальное ускорение подрессоренных масс и которые предусмотрены соответствующими каждому из двух передних колес.
Краткое описание чертежей
Фиг. 1 - схематичный чертеж, иллюстрирующий общую конфигурацию транспортного средства, являющегося первым вариантом осуществления заявляемого изобретения;
Фиг. 2 - передний вид в разрезе, иллюстрирующий устройство подвески, соответствующее передним колесам, изображенным на фиг. 1;
Фиг. 3 - вид спереди в разрезе, иллюстрирующий увеличенный вид амортизатора, изображенного на фиг. 2;
Фиг. 4 - вид спереди в разрезе, иллюстрирующий устройство подвески, соответствующее задним колесам, изображенным на фиг. 1;
Фиг. 5 - вид спереди в разрезе, иллюстрирующий увеличенный вид амортизатора, изображенного на фиг. 4;
Фиг. 6 - блок-схема управления для обычного управления на основе теории нелинейного H∞-управления, которое выполняется электронным блоком управления (ECU), в качестве устройства управления, изображенного на фиг.1;
Фиг. 7 - схематичный чертеж, иллюстрирующий процесс, где передние колеса и задние колеса проезжают последовательно по ухабу на поверхности дороги, в качестве примера случая, когда создается продольное колебание;
Фиг. 8 - схема, иллюстрирующая колебания подрессоренной части на стороне передних колес и подрессоренной части на стороне задних колес, когда передние колеса и задние колеса проезжают последовательно по ухабу на поверхности дороги;
Фиг. 9 - схема, иллюстрирующая взаимосвязь между резонансной частотой колебаний подрессоренных масс и амплитудой движения кузова транспортного средства; и
Фиг. 10 - вид спереди в разрезе, иллюстрирующий устройство подвески, соответствующее задним колесам в транспортном средстве, являющемся вторым вариантом осуществления заявляемого изобретения.
Способы осуществления изобретения
Далее следует пояснение со ссылкой на прилагаемые чертежи различных вариантов осуществления в качестве режимов осуществления заявляемого изобретения. В отличие от вариантов осуществления, ниже заявляемое изобретение может быть выполнено также в форме различных аспектов, таких как аспекты, описанные в предыдущих параграфах, и аспекты, полученные посредством различных модификаций и изменений на основе знаний, которыми владеет специалист в области техники. Модификации вариантов осуществления ниже могут аналогично быть получены посредством обращения к техническим признакам, изложенным в объяснении в предыдущих параграфах.
Первый вариант осуществления изобретения
Конфигурация устройства
Фиг. 1 иллюстрирует схематично транспортное средство 10, являющееся вариантом осуществления заявляемого изобретения. Система подвески устанавливается в транспортном средстве 10. Система подвески состоит из четырех устройств 20 подвески, независимого типа подвески, соответствующих, соответственно, четырем колесам 12, которые располагаются в четырех углах транспортного средства 10. Каждое устройство 20 подвески предоставляется между нижним рычагом 22 подвески, который удерживает колесо 12 и который составляет фрагмент неподрессоренной части, и крепежной частью 24, которая предоставляется в кузове транспортного средства и которая составляет фрагмент подрессоренной части, так что нижний рычаг 22 подвески и крепежная часть 24 соединяются посредством устройства 20 подвески. Здесь колеса 12 и устройства 20 подвески являются общими терминами. В тех случаях, где необходимо пояснить, какому из четырех колес соответствует данное колесо 12 или данное устройство 20 подвески, суффикс FL, FR, RL или RR, соответствующий, соответственно, левому переднему колесу, правому переднему колесу, левому заднему колесу и правому заднему колесу, будет добавлен к соответствующему колесу или устройству подвески, как проиллюстрировано на чертежах. Когда необходимо различать между стороной передних колес и стороной задних колес, будут использованы суффиксы Fr и Rr.
Каждое устройство 20 подвески имеет цилиндрическую пружину 30, в качестве пружины подвески, и амортизатор 32 гидравлического типа. Цилиндрическая пружина 30 и амортизатор 32 гидравлического типа располагаются параллельно друг другу между нижним рычагом 22 и крепежной частью 24. Как объяснено подробно далее, два амортизатора 32Fr, соответствующих передним колесам 12FR, 12FL, являются традиционными амортизаторами, то есть амортизаторами, коэффициент демпфирования которых не может быть изменен, тогда как два амортизатора 32Rr, соответствующие задним колесам 12RR, 12RL, являются амортизаторами, сконфигурированными так, что их коэффициент демпфирования может быть изменен. Структура амортизаторов будет объяснена подробно ниже в других амортизаторах 32Fr, соответствующих передним колесам 12Fr (далее также называемых "амортизаторами 32Fr со стороны передних колес" в объяснении ниже), и амортизаторах 32Rr, соответствующих задним колесам 12Rr (далее в данном документе также называемых "амортизаторами 32Rr со стороны задних колес" в объяснении ниже).
Структура амортизаторов 32Fr со стороны передних колес будет объяснена подробно далее со ссылкой на фиг. 2 и фиг. 3. Как проиллюстрировано на фиг. 2, каждый из амортизаторов 32Fr со стороны передних колес конфигурируется посредством включения в него корпуса 40, который содержит рабочую текучую среду, поршня 42, который вставляется с возможностью скольжения и герметичным образом в корпус 40, и штока 44 поршня, так что его нижняя концевая часть соединяется с поршнем 42, а верхняя концевая часть протягивается вверх из корпуса 40. Корпус 40 соединяется с нижним рычагом 22 через втулку 46, которая предоставляется в нижней концевой части корпуса 40, и шток 44 поршня соединяется с крепежной частью 24 через верхнюю опору 48, имеющую виброустойчивую резиновую деталь. Шток 44 поршня ходит сквозь часть 50 крышки, которая предусмотрена на вершине корпуса 40, и находится в скользящем соприкосновении с частью 50 крышки через герметизирующий уплотнитель 52.
Как проиллюстрировано на фиг. 3, корпус 40 конфигурируется посредством включения в него внешнего цилиндра 60 и внутреннего цилиндра 62 с буферной камерой 64, формируемой между внешним цилиндром 60 и внутренним цилиндром 62. Поршень 42 вставляется с внутренней стороны внутреннего цилиндра 62 и делит внутреннее пространство внутреннего цилиндра 62 на верхнюю камеру 66 и нижнюю камеру 68. Соединяющие каналы 70, 72, которые соединяют верхнюю камеру 66 и нижнюю камеру 68, предоставляются концентрически в поршне 42, на множестве соответствующих участков (два участка, каждый изображен на фиг. 3). Круглая пластина 74 клапана, сделанная из упругого материала, располагается на нижней поверхности поршня 42. Соединяющие каналы 70 на внутренней периферийной стороне поршня 42 закупорены пластиной 74 клапана, так что рабочей текучей среде предоставляется возможность перетекать из верхней камеры 66 в нижнюю камеру 68, когда пластина 74 клапана сгибается вследствие разности гидравлического давления между верхней камерой 66 и нижней камерой 68. Две круглые пластины 76, 78 клапана, выполненные из упругого материала, располагаются на верхней поверхности поршня 42. Соединительные каналы 72 на внешней периферийной стороне поршня 42 закупориваются пластинами 76, 78 клапана, при этом соединительные каналы 70 на внутренней периферийной стороне поршня 42 обычно не закупориваются благодаря отверстиям, предусмотренным в пластинах 76, 78 клапана. Рабочей текучей среде предоставляется возможность перетекать из нижней камеры 68 в верхнюю камеру 66, когда пластина 76 клапана сгибается вследствие разности гидравлического давления между верхней камерой 66 и нижней камерой 68. Корпус 80 клапана основания, имеющий соединительные каналы и пластины клапана, аналогичные каналам и пластинам поршня 42, предоставляется между нижней камерой 68 и буферной камерой 64.
Кольцеобразный нижний ограничитель 82 предоставляется на внешней периферийной части корпуса 40. Кольцеобразный верхний ограничитель 84 предоставляется на стороне нижней поверхности крепежной секции 24. Цилиндрическая пружина 30 поддерживается нижним ограничителем 82 и верхним ограничителем 84 в состоянии, когда цилиндрическая пружина 30 сжимается нижним ограничителем 82 и верхним ограничителем 84. Кольцеобразный элемент 86 предоставляется неподвижным образом на внешней периферийной части штока 44 поршня во фрагменте последнего, который размещается в верхней камере 66. Кольцеобразная амортизационная резиновая деталь 88 присоединяется к верхней поверхности кольцеобразного элемента 86. Цилиндрическая амортизационная резиновая деталь 90 присоединяется к верхней концевой части штока 44 поршня. Нижняя поверхность части 50 крышки корпуса 40 упирается в амортизационную резиновую деталь 88, когда кузов транспортного средства и колесо движутся относительно друг друга на заданное расстояние в направлении продвижения друг от друга (далее в данном документе также называемом "направлением обратного хода"); наоборот, верхняя поверхность части 50 крышки упирается в амортизационную резиновую деталь 90, когда кузов транспортного средства и колесо движутся относительно друг друга на заданное расстояние в направлении продвижения друг к другу (далее в данном документе также называемом "направлением прямого хода"). Амортизаторы 32Fr со стороны передних колес, таким образом, имеют стопоры, так называемые стопор прямого хода и стопор обратного хода, для приближения и отдаления кузова транспортного средства и колес друг к/от друга.
Вследствие такой структуры, например, давление текучей среды в верхней камере 66 увеличивается, если нижний рычаг 22 и крепежная часть 24 раздвигаются друг от друга, и поршень 42 движется вверх относительно корпуса 40. В результате часть рабочей текучей среды в верхней камере 66 перетекает в нижнюю камеру 68, через соединительные каналы 70, а часть рабочей текучей среды в буферной камере 64 перетекает в нижнюю камеру 68, через соединительные каналы корпуса 80 клапана основания. Наоборот, давление текучей среды в нижней камере 68 увеличивается, когда нижний рычаг 22 и крепежная часть 24 продвигаются ближе друг к другу, и поршень 42 перемещается вниз относительно корпуса 40. В результате часть рабочей текучей среды в нижней камере 68 перетекает в верхнюю камеру 66 через соединительные каналы 72 и вытекает в буферную камеру 64 через соединительные каналы корпуса 80 клапана основания. Сила сопротивления оказывается по отношению к циркуляции рабочей текучей среды в этих случаях, и сила сопротивления оказывается, таким образом, по отношению к относительному перемещению поршня 42 и корпуса 40. То есть амортизаторы 32Fr со стороны передних колес структурированы так, чтобы создавать демпфирующее усилие по отношению к перемещению сближения и отдаления подрессоренной части и неподрессоренной части. Коэффициент демпфирования амортизаторов 32Fr со стороны передних колес принимает значение, то есть фиксированное значение, соответствующее площади поперечного сечения канала, через который рабочая текучая среда проходит, после того как скорость перемещения сближения и отдаления подрессоренной части и неподрессоренной части становится больше заданной скорости.
Структура амортизаторов 32Rr, соответствующих задним колесам 12Rr, будет объяснена далее подробно со ссылкой на фиг. 4 и 5. Аналогично амортизаторам 32Fr со стороны передних колес амортизаторы 32Rr со стороны задних колес являются амортизаторами гидравлического типа. Составные элементы, идентичные элементам амортизаторов 32Fr со стороны передних колес, будут идентифицированы как соответствующие элементы посредством использования идентичных ссылочных символов, и объяснение элементов будет опущено или упрощено.
Как и в случае амортизаторов 32Fr со стороны передних колес, амортизаторы 32Rr со стороны задних колес конфигурируются посредством включения в них корпуса 100, поршня 102 и штока 104 поршня. Амортизаторы 32Rr со стороны задних колес структурируются так, что сила сопротивления оказывается по отношению к относительному перемещению корпуса 100 и поршня 102, то есть структурируется так, что демпфирующее усилие создается по отношению к перемещению сближения и отдаления подрессоренной части и неподрессоренной части.
Как указано выше, амортизаторы 32Rr со стороны задних колес, каждый, имеют механизм 110 изменения коэффициента демпфирования. Механизм 110 изменения коэффициента демпфирования конфигурируется посредством включения в него электромагнитного мотора 120 роторного типа (далее в данном документе также просто называемого "мотором 120"), регулирующего штока 122, который может перемещаться в осевом направлении, и механизма 124 преобразования движения, который преобразует вращательное движение мотора 120 в движение в осевом направлении регулирующего штока 122. Мотор 120 размещается в корпусе 126 мотора, который соединяется с крепежной частью 24 посредством верхней опоры 128, сконфигурированной посредством включения в нее виброустойчивой резиновой детали, на внешней периферийной части корпуса 126 мотора. Шток 104 поршня прикрепляется к корпусу 126 мотора в верхней концевой части штока 104 поршня. В результате шток 104 поршня соединяется с крепежной частью 24 посредством корпуса 126 мотора. Сквозное отверстие 130, протягивающееся в осевом направлении, формируется в штоке 104 поршня. Регулировочный шток 122 вставляется через сквозное отверстие 130 таким образом, чтобы иметь возможность перемещаться в осевом направлении. Регулировочный шток 122 соединяется с мотором 120 посредством механизма 124 преобразования движения, в верхней концевой части регулировочного штока 122, так что последний должен перемещаться в осевом направлении в ответ на вращательное приведение в движение мотора 120.
Как проиллюстрировано на фиг. 5, сквозное отверстие 130 штока 104 поршня имеет ступенчатую форму, где верхний фрагмент составляет часть 132 большого диаметра, а нижний фрагмент составляет часть 134 малого диаметра. Часть 132 большого диаметра открывается в верхнюю камеру 66 посредством соединительных каналов 136, а часть 134 малого диаметра открывается в нижнюю камеру 68. Верхняя камера 66 и нижняя камера 68 сообщаются, таким образом, друг с другом. Помимо фрагмента нижней концевой части 138 внешний диаметр регулирующего штока 122 меньше внутреннего диаметра части 132 большого диаметра и больше внутреннего диаметра части 134 малого диаметра. Нижняя концевая часть 138 регулирующего штока 122 формируется как конус, внешний диаметр которого уменьшается вниз так, чтобы иметь возможность вхождения в часть 134 малого диаметра. Герметизирующий уплотнитель 140 предоставляется выше фрагмента, в котором соединительные каналы 136 сквозного отверстия 130 соединяются, чтобы обеспечивать жидкостную герметичность между внутренней периферийной поверхностью сквозного отверстия 130 и внешней периферийной поверхностью регулирующего штока 122.
Регулирующий шток 122 может перемещаться в осевом направлении в результате движения мотора 120. Регулирующий шток 122 может изменять размер (площадь поперечного сечения) просвета 150 сквозного отверстия 130. Когда рабочая текучая среда протекает сквозь просвет 150, сила сопротивления оказывается по отношению к перемещению поршня 102 в вертикальном направлении, как описано выше. Величина этой силы сопротивления изменяется в зависимости от размера просвета 150. Соответственно, амортизаторы 32Rr со стороны задних колес имеют структуру, в которой регулирующий шток 122 должен перемещаться в осевом направлении, посредством движения мотора 120, чтобы изменять, таким образом, просвет 150; в результате становится возможным изменять характеристику демпфирования при перемещении сближения и отдаления подрессоренной части и неподрессоренной части, то есть изменять коэффициент демпфирования. В более подробных выражениях амортизаторы 32Rr со стороны задних колес имеют структуру, в которой мотор 120 управляется таким образом, что угол его поворота становится углом поворота, соответствующим коэффициенту демпфирования, который амортизаторы 32Rr со стороны задних колес должны иметь, и коэффициент демпфирования амортизаторов 32Rr со стороны задних колес, таким образом, изменяется.
Транспортное средство 10 конфигурируется таким образом, что резонансная частота ωFr колебаний подрессоренных масс, соответствующая передним колесам Fr, и резонансная частота ωRr колебаний подрессоренных масс, соответствующая задним колесам Rr, отличаются друг от друга. В частности, резонансная частота ωRr колебаний подрессоренных масс, соответствующая задним колесам, на которых соответствующие амортизаторы 32 имеют механизм 110 изменения коэффициента демпфирования, задается более низкой, чем резонансная частота ωFr колебаний подрессоренных масс со стороны передних колес. Как задано посредством формулы ниже, резонансная частота со колебаний подрессоренных масс определяется по жесткости K пружины для пружины 30 подвески и по массе m подрессоренной части (получающейся в результате деления распределенной нагрузки ω кузова транспортного средства, поддерживаемой соответствующим колесом, на ускорение g свободного падения):
ω=(K/m)½
В транспортном средстве 10, соответственно, распределенная нагрузка на передние колеса Fr и жесткость KFr пружины для цилиндрических пружин 30Fr устройств 20 подвески со стороны передних колес, а также распределенная нагрузка на задние колеса Rr и жесткость KRr пружины для цилиндрических пружин 30Rr устройств 20 подвески со стороны задних колес регулируются таким образом, что резонансная частота ωRr колебаний подрессоренных масс на стороне задних колес является более низкой, чем резонансная частота ωFr колебаний подрессоренных масс на стороне передних колес. В частности, жесткость KFr пружины для каждой пружины 30Fr на стороне передних колес устанавливается таким образом, что резонансная частота ωFr колебаний подрессоренных масс на стороне передних колес равна 1,2 Гц, на основе распределенной нагрузки на передние колеса Fr, которая определяется посредством спроектированного кузова транспортного средства, а жесткость KRr пружины для каждой пружины 30Rr на стороне задних колес устанавливается таким образом, что резонансная частота ωRr колебаний подрессоренных масс на стороне задних колес равна 1,0 Гц, на основе распределенной нагрузки на задние колеса Rr.
В системе подвески, установленной в транспортном средстве 10, механизм 110 изменения коэффициента демпфирования в каждом из амортизаторов 32Rr на стороне задних колес управляется посредством электронного блока управления (ECU) 200 подвески в качестве устройства управления. ECU 200 конфигурируется посредством наличия, в качестве главной составляющей, компьютера, который снабжен центральным процессором (ЦП), постоянным запоминающим устройством (ПЗУ), оперативным запоминающим устройством (ОЗУ) и т.д. ECU 200 имеет подключенные к нему два инвертора [INV] 2 02, которые предоставляются, соответственно, для соответствующих моторов 120 амортизаторов 32Rr на стороне задних колес и которые функционируют как соответствующие схемы возбуждения соответствующих моторов 120. Инверторы 202 соединяются с аккумулятором [ВАТ] 206 через преобразователь [CONV] 204. Мощность подается к моторам 120 амортизаторов 32Rr источником мощности, который конфигурируется посредством включения в него преобразователя 204 и аккумулятора 206.
Транспортное средство 10 снабжается, например, датчиком [Gx] 220 продольного ускорения, который обнаруживает продольное ускорение, формируемое в кузове транспортного средства; датчиком [Gy] 222 поперечного ускорения, который обнаруживает поперечное ускорение, формируемое в кузове транспортного средства; тремя датчиками [Gz] 224 вертикального ускорения, которые обнаруживают вертикальное ускорение (ускорение вверх-вниз) каждой крепежной части 24 кузова транспортного средства, соответствующей правому переднему колесу 12FR и левому переднему колесу 12FL, и фрагмента кузова транспортного средства, расположенного по центру между двумя задними колесами 12Rr; четырьмя датчиками [St] 226 хода, которые обнаруживают расстояние (далее в данном документе также называемое "ходом", поскольку расстояние является величиной растяжения и сжатия амортизаторов 32) между подрессоренной частью и неподрессоренной частью на каждом колесе 12; датчиком [δ] 228 угла поворота рулевого колеса, который обнаруживает угол поворота рулевого колеса; и датчиком [v] 230 скорости транспортного средства, который обнаруживает скорость движения транспортного средства (далее в данном документе также называемую "скоростью транспортного средства" для краткости). Эти датчики соединяются с компьютером ECU 200. ECU 200 управляет работой амортизаторов 32Rr на стороне задних колес на основе сигналов от этих переключателей и датчиков. ROM компьютера ECU 200 хранит в себе, например, программу и различные элементы данных, принадлежащие управлению амортизаторами 32Rr на стороне задних колес.
Управление амортизаторами
Схема управления, обычно выполняемая в транспортном средстве 10, соблюдает закон управления, который основан на теории нелинейного H∞-управления (например, теории нелинейного H∞-управления, раскрытой в японском патенте №3787038). Вышеупомянутая теория нелинейного H∞-управления уже является традиционной теорией и будет рассматриваться как удобно объясненная. Фиг. 6 иллюстрирует блок-схему обычного управления, основанного на теории нелинейного H∞-управления. При обычном управлении сначала соответствующая величина St хода каждого из четырех амортизаторов 32 получается от соответствующих четырех датчиков 226 хода, и соответствующая скорость Vst хода каждого из четырех амортизаторов 32 вычисляется на основе обнаруженных ходов St, как проиллюстрировано на фиг. 6. Три вертикальных ускорения подрессоренных масс, обнаруженных тремя датчиками 224 вертикального ускорения, преобразуются в соответствующие вертикальные ускорения Gz подрессоренных масс подрессоренных частей, соответствующих каждому из четырех колес 12. Абсолютная скорость Vb подрессоренных масс подрессоренной части, соответствующей каждому из четырех колес 12, вычисляется на основе преобразованного вертикального ускорения Gz подрессоренных масс, соответствующего каждому из четырех колес 12.
Закон управления, основанный на теории нелинейного H∞-управления и который используется для управления в обычные моменты времени, сохранен в компьютере ECU 200. В этом законе управления вкратце колебание, формируемое в кузове транспортного средства, делится на соответствующие компоненты колебания, а именно вертикальное колебание, являющееся колебанием положения центра тяжести кузова транспортного средства в вертикальном направлении, поперечное колебание, являющееся вращательным колебанием вокруг оси продольного направления, которая проходит через центр тяжести кузова транспортного средства, и продольное колебание, являющееся вращательным колебанием вокруг оси поперечного направления, которая проходит через центр тяжести кузова транспортного средства, и вышеупомянутые компоненты колебания демпфируются четырьмя амортизаторами 32 согласованно. Вводятся величины St хода и скорости Vst хода, соответствующие каждому из четырех амортизаторов 32, и вертикальные ускорения Gz подрессоренных масс и абсолютные скорости Vb подрессоренных масс, соответствующие каждому из четырех колес 12, и целевые демпфирующие усилия F*, которые являются демпфирующими усилиями, которые должны быть созданы соответствующими четырьмя амортизаторами 32, вычисляются в соответствии с вышеупомянутым законом управления, основанным на теории нелинейного H∞-управления.
В транспортном средстве 10 только амортизаторы 32Rr со стороны задних колес предоставляют возможность изменения демпфирующего усилия относительно скорости хода. Каждый из амортизаторов 32Rr на стороне задних колес управляется на основе целевого демпфирующего усилия F*, которое соответствует соответствующему амортизатору 32Rr на стороне задних колес, среди целевых демпфирующих усилий F*, вычисленных, как описано выше. В частности, ECU 200 выполняет управление, которое подразумевает определение соответствующих целевых коэффициентов C* демпфирования посредством деления целевых демпфирующих усилий F*, соответствующих каждому из амортизаторов 32Rr на стороне задних колес, на скорости Vst хода, соответствующие целевым демпфирующим усилиям F*, чтобы управлять, таким образом, механизмом 110 изменения коэффициента демпфирования каждого из амортизаторов 32Rr на стороне задних колес, и которое подразумевает управление мотором 120 механизма 110 изменения коэффициента демпфирования, чтобы добиваться соответствующего целевого коэффициента C* демпфирования. То есть транспортное средство конфигурируется так, что управление, которое должно выполняться по четырем амортизаторам, которые предоставляются соответствующим четырем колесам, выполняется только по амортизаторам 32Rr на стороне задних колес, которые имеют механизм 110 изменения коэффициента демпфирования.
Закон управления, основанный на теории нелинейного H∞-управления, будет объяснен далее. В теории нелинейного H∞-управления обобщенный объект управления прежде всего предполагается как модель управления, имеющая четыре входа и выхода, а именно входные данные управления, входное возмущение, входные данные управления и выходные данные управления. Постулированный обобщенный объект управления транспортного средства 10 полагается на уравнение движения, свойственное движению положения центра тяжести кузова транспортного средства в вертикальном направлении, уравнение движения, свойственное вращательному движению вокруг оси продольного направления, которая проходит через центр тяжести кузова транспортного средства, и уравнение движения, свойственное вращательному движению вокруг оси поперечного направления, которое проходит через центр тяжести кузова транспортного средства. Уравнения движения обозначают, соответственно, соотношение между ускорением положения центра тяжести кузова транспортного средства в вертикальном направлении (вертикальное ускорение), угловым ускорением вокруг оси продольного направления, которая проходит через центр тяжести кузова транспортного средства (угловое ускорение наклона относительно продольной оси), угловым ускорением вокруг оси поперечного направления, которая проходит через центр тяжести кузова транспортного средства (угловое ускорение наклона относительно поперечной оси), а также величинами St хода, скоростями Vst хода, вертикальными ускорениями Gz подрессоренных масс и абсолютными скоростями Vb подрессоренных масс, полученными, как описано выше. Уравнения движения соблюдают представление пространства состояний, из которого получаются уравнения состояния и уравнения выхода. Здесь величины St хода, скорости Vst хода, вертикальные ускорения Gz подрессоренных масс и абсолютные скорости Vb подрессоренных масс используются в качестве параметров состояния, и вертикальное ускорение, поперечное угловое ускорение и продольное угловое ускорение выбираются в качестве выходных данных управления (выходных данных измерения). Произведения, получающиеся в результате умножения вертикального ускорения, поперечного углового ускорения, продольного углового ускорения на весовую функцию (7,0 Гц низкочастотный фильтр), являющуюся взвешиванием частоты, выбираются в качестве выводов оценки, и входные данные управления (нелинейная часть соответствующего коэффициента демпфирования) также умножается на весовую функцию, чтобы определять обобщенный объект управления. Далее вычисляется решение, которое удовлетворяет уравнению Риккати, и нелинейная часть коэффициента демпфирования, которая является входными данными управления, вычисляется на основе вычисленного решения. При вычислении нелинейной части коэффициента демпфирования существует множество соответствующих коэффициентов усиления (взвешенных значений), соответствующих каждому из вертикального колебания, поперечного колебания и продольного колебания, и коэффициенты усиления используются для того, чтобы определять, какое демпфирование среди вертикального колебания, поперечного колебания и продольного колебания должно быть приоритетным.
Проще говоря, вертикальное ускорение, поперечное угловое ускорение и продольное угловое ускорение, которые являются входными данными управления, вычисляются на основе величин St хода, скоростей Vst хода, вертикальных ускорений Gz подрессоренных масс и абсолютных скоростей Vb подрессоренных масс, являющихся параметрами состояния, и нелинейная часть коэффициента демпфирования, являющаяся входными данными управления, вычисляется таким образом, что вертикальное ускорение, поперечное угловое ускорение и продольное угловое ускорение становятся нулевыми. Соответствующее целевое демпфирующее усилие F* вычисляется на основе нелинейной части вычисленного коэффициента демпфирования.
Отличительные признаки транспортного средства Возникающее колебание определяется в транспортном средстве, когда два передних колеса и два задних колеса последовательно проезжают по ухабу на поверхности дороги, как проиллюстрировано на фиг. 7. В этом случае подрессоренная часть со стороны передних колес и подрессоренная часть со стороны задних колес испытывают демпфирование колебания частоты (частоты ωd демпфируемого колебания), которая дана посредством выражения ниже.
ωd=(1-ζ2)½·ω (для случая, когда относительное демпфирование ζ<1)
Здесь относительное демпфирование равно ζ=C/Cc, а критический коэффициент демпфирования равен Cc=2·(m-k)½ для коэффициента C демпфирования амортизатора. В обычном транспортном средстве колебание при проезде колеса по ухабу или выбоине на поверхности дороги задается так, чтобы сходиться в какой-то степени в течение одного периода. Если частота демпфируемого колебания со стороны передних колес и частота демпфируемого колебания со стороны задних колес, по существу, идентичны, тогда смещение подрессоренных частей со стороны передних колес и со стороны задних колес достигают максимального значения в этом порядке, и колебание сходится в этом порядке, как проиллюстрировано на фиг. 8. В обычном транспортном средстве резонансная частота ωRr колебаний подрессоренных масс со стороны задних колес задается большей, чем резонансная частота ωFr колебаний подрессоренных масс со стороны передних колес. В обычном транспортном средстве, в частности, продольное колебание в кузове транспортного средства легко не возникает вследствие совпадения моментов времени, в которые смещение колебания со стороны передних колес и колебания со стороны задних колес в направлении обратного хода становится максимальным.
В транспортном средстве 10, наоборот, резонансная частота ωRr колебаний подрессоренных масс на стороне задних колес устанавливается ниже резонансной частоты ωFr колебаний подрессоренных масс на стороне передних колес, как описано выше. В транспортном средстве 10, в частности, наклон кузова транспортного средства относительно поперечной оси легко происходит в случае, когда транспортное средство 10 проезжает по ухабам на поверхности дороги в состоянии, когда коэффициенты демпфирования амортизаторов 32Rr на стороне задних колес фиксируются в коэффициент демпфирования, который служит в качестве опорного значения, без управления амортизаторами 32Rr на стороне задних колес, поскольку моменты времени, в которые смещения колебания на стороне передних колес и колебания на стороне задних колес в направлении обратного хода становятся максимальными, сдвинуты относительно друг друга. Как проиллюстрировано на фиг. 9, поведение кузова транспортного средства имеет тенденцию становиться более выраженным, когда резонансная частота колебаний подрессоренных масс становится более низкой. В транспортном средстве 10 поведение подрессоренной части со стороны передних колес сравнительно менее выражено, тогда как поведение подрессоренной части со стороны задних колес сравнительно более выражено. В транспортном средстве 10 только амортизаторы 32Rr на стороне задних колес имеют механизм 110 изменения коэффициента демпфирования, и только амортизаторы 32Rr на стороне задних колес являются управляемыми. Таким образом, поведение всего кузова транспортного средства может быть эффективно ограничено посредством управления демпфирующим усилием, оказываемым на сравнительно большое перемещение подрессоренной части со стороны задних колес. В транспортном средстве 10 используется управление, которое должно выполняться в транспортном средстве, которое снабжено четырьмя амортизаторами, соответствующими каждому из четырех колес, и так, что коэффициенты демпфирования амортизаторов могут быть изменены. Таким образом, достигается действие, посредством которого поведение кузова транспортного средства подавляется без создания новой специализированной системы управления для транспортного средства 10.
В транспортном средстве 10 резонансная частота ωRr колебаний подрессоренных масс на стороне задних колес задается более низкой, чем резонансная частота ωFr со стороны передних колес, и только амортизаторы 32Rr, соответствующие двум задним колесам 12Rr, являющимся колесами с пониженной резонансной частотой колебаний подрессоренных масс из двух передних колес 12Fr и двух задних колес 12Rr, могут иметь свой изменяемый коэффициент демпфирования. Однако амортизаторы, коэффициент демпфирования которых может быть изменен, могут быть предусмотрены только так, чтобы соответствовать двум колесам более низкой резонансной частоты колебаний подрессоренных масс из передних колес 12Fr и задних колес 12Rr. То есть амортизаторы, коэффициенты демпфирования которых могут быть изменены, могут быть предусмотрены так, чтобы соответствовать соответствующим передним колесам 12Fr, в обычном транспортном средстве, где резонансная частота ωRr колебаний подрессоренных масс со стороны задних колес задается более высокой, чем резонансная частота ωFr со стороны передних колес. Однако многие транспортные средства имеют двигатель, расположенный с передней стороны. В таких транспортных средствах на вес подрессоренной части на стороне передних колес незначительно влияют пассажиры или перевозимый груз, и она не колеблется слишком сильно. Вес подрессоренной части на стороне задних колес наоборот изменяется значительно в зависимости от пассажиров и перевозимого груза. В транспортном средстве 10 варианта осуществления задние колеса 12Rr снабжаются амортизаторами, коэффициент демпфирования которых может быть изменен даже при изменении веса подрессоренной части со стороны задних колес. Соответственно, поведение кузова транспортного средства может ограничиваться более эффективно даже при изменении веса подрессоренной части со стороны задних колес, чем в транспортном средстве, имеющем конфигурацию, в которой амортизаторы, коэффициент демпфирования которых может быть изменен, предоставляются, соответственно, для передних колес 12Fr. В транспортном средстве 10, следовательно, становится возможным улучшать как стабильность при рулении, так и характеристику плавности хода, которые являются взаимно исключающими, сравнительно недорогим образом, поскольку амортизаторы, коэффициент демпфирования которых может быть изменен, не предоставляются на всех колесах.
Второй вариант осуществления изобретения
В транспортном средстве второго варианта осуществления, как и в случае транспортного средства 10 первого варианта осуществления, резонансная частота ωRr колебаний подрессоренных масс со стороны задних колес задается более низкой, чем резонансная частота ωFr со стороны передних колес, и только амортизаторы, соответствующие задним колесам 12Rr, задаются как имеющие изменяемый коэффициент демпфирования. В транспортном средстве второго варианта осуществления, однако, амортизаторы 250, которые предоставляются, соответственно, для задних колес 12Rr, не являются амортизаторами гидравлического типа, а являются амортизаторами электромагнитного типа, каждый из которых имеет электромагнитный мотор 252, который создает приближающие и отдаляющие усилия, которые являются усилиями, которые полагаются на усилия, формируемые электромагнитным мотором 252, и которые воздействуют на подрессоренную часть и неподрессоренную часть, соответствующие амортизаторам 250, для продвижения подрессоренной части и неподрессоренной части ближе или дальше друг относительно друга. За исключением структуры амортизаторов на стороне задних колес и схемы их управления, транспортное средство варианта осуществления идентично транспортному средству 10 первого варианта осуществления. Соответственно, составные элементы, идентичные элементам транспортного средства 10 первого варианта осуществления, будут идентифицированы как соответствующие элементы посредством использования идентичных ссылочных символов, и объяснение элементов будет опущено или упрощено.
Конструкция амортизаторов на стороне задних колес Фиг. 10 иллюстрирует вид в разрезе устройства 260 подвески, соответствующего задним колесам 12Rr. Устройство 260 подвески, соответствующее задним колесам 12Rr, конфигурируется посредством включения в него амортизатора 250 электромагнитного типа и цилиндрической пружины 262 в качестве пружины подвески. Вышеупомянутые элементы объединяются вместе.
Амортизатор 250 снабжается: механизмом шарикового винта, сконфигурированным посредством включения в него резьбового штока 270, в качестве части с наружной резьбой, имеющей канавку резьбы, сформированную на ней, и гайки 272, в качестве части с внутренней резьбой, которая удерживает шарик подшипника и которая свинчивается с резьбовым стержнем 270; электромагнитным мотором 252 (далее в данном документе также называемый просто "мотором 252") в качестве источника движущей энергии и корпусом, который вмещает в себя мотор 252. Корпус 276 удерживает с возможностью вращения резьбовой шток 270 и соединяется с крепежной частью 24 через виброустойчивую резиновую деталь 278, на внешней периферийной части корпуса 276. Мотор 252 имеет полый вал 280 мотора, так что резьбовой шток 270 прикрепляется, в своей верхней концевой части, к валу 280 мотора посредством прохождения через внутреннюю сторону последнего. В частности, мотор 252 передает крутящий момент к резьбовому штоку 270.
Амортизатор 250 имеет цилиндр 294, сконфигурированный посредством включения в него внешней трубы 290 и внутренней трубы 292, которая вставляется во внешнюю трубу 290 и которая протягивается выше верхней концевой части внешней трубы 290. Внешняя труба 290 соединяется с нижним рычагом 22 через крепежную втулку 296, которая предоставляется в нижней концевой части внешней трубы 290. Верхняя концевая часть внутренней трубы 292 прикрепляется к корпусу 276 в состоянии, где резьбовой шток 270 вставлен сквозь внутреннюю трубу 292. Труба 298 опоры гайки монтируется на внутреннюю нижнюю часть внутренней трубы 292, так что гайка 272 прикрепляется в состоянии, где последняя завинчивается на резьбовой шток 270, к внутренней стороне верхней концевой части трубы 298 опоры гайки.
Амортизатор 250 дополнительно имеет закрывающую трубу 300, так что верхняя концевая часть закрывающей трубы 300 соединяется со стороной нижней поверхности крепежной части 24 через виброустойчивую резиновую деталь 302 в состоянии, где цилиндр 294 вставлен сквозь закрывающую трубу 300. Фланец 304 (функционирующий в качестве верхнего ограничителя) формируется на верхней концевой части закрывающей трубы 300. Цилиндрическая пружина 262, в качестве пружины подвески, поддерживается в состоянии сжатия посредством фланца 304 и кольцеобразного нижнего ограничителя 306, который предоставляется на внешней периферийной поверхности внешней трубы 290.
Когда подрессоренная часть и неподрессоренная часть приводятся ближе или дальше друг относительно друга, резьбовой шток 270 и гайка 272 амортизатора 250 могут перемещаться относительно в осевом направлении благодаря вышеописанной структуре, так что резьбовой шток 270 вынуждается вращаться относительно гайки 272 в результате этого относительного движения. Вал 280 мотора также вращается в результате. Мотор 252 устанавливается, чтобы иметь возможность сообщать крутящий момент вращения резьбовому штоку 270, так что, вследствие этого крутящего момента вращения, может создаваться сила сопротивления, которая оказывается по отношению к относительному вращению резьбового штока 270 и гайки 272 в направлении, препятствующем этому относительному вращению. Эта сила сопротивления может быть использована в качестве демпфирующего усилия, оказываемого на перемещение сближения и отдаления подрессоренной части и неподрессоренной части. Амортизатор 250 устанавливается, чтобы иметь возможность создания толкающего усилия, оказываемого на относительное перемещение подрессоренной части и неподрессоренной части. Демпфирующее усилие выражается как произведение коэффициента демпфирования и скорости хода. Коэффициент демпфирования амортизатора 250 на стороне задних колес может быть произвольно изменен, и, следовательно, считается, что коэффициент демпфирования может быть изменен на произвольный коэффициент демпфирования для данной скорости хода. То есть амортизатор 250 на стороне задних колес имеет механизм изменения коэффициента демпфирования.
Управление амортизатором
В транспортном средстве варианта осуществления выполняются параллельно управление, чтобы вынуждать колебание кузова транспортного средства демпфироваться посредством четырех амортизаторов согласованно (далее в данном документе также называемое "управлением амортизацией колебания кузова транспортного средства"), управление для подавления наклона кузова транспортного средства относительно продольной оси, вызванного поворотом транспортного средства (далее в данном документе также называемое "управлением подавлением наклона относительно продольной оси при повороте"), и управление для подавления наклона кузова транспортного средства относительно поперечной оси, вызванного ускорением и замедлением транспортного средства (далее в данном документе также называемое "управлением подавлением наклона относительно поперечной оси при ускорении и замедлении"). Для каждого из соответствующих четырех амортизаторов, в частности, соответствующее целевое усилие F* сближения и отдаления, являющееся целевым значением управления, определяется посредством суммирования компонентов усилия сближения или отдаления для каждого из управления демпфированием колебания кузова транспортного средства, управления подавлением наклона относительно продольной оси при повороте и управления подавлением наклона относительно поперечной оси при ускорении и замедлении, и угол θ поворота каждого мотора 252 каждого из двух амортизаторов 250 управляется таким образом, что амортизаторы 250, соответствующие двум задним колесам 12Rr, создают целевое усилие F* сближения и отдаления. Далее следует объяснение способа для определения компонентов усилия сближения или отдаления, которое должно быть сформировано, в каждом из вышеупомянутых случаев управления.
а) Управление демпфированием колебания кузова транспортного средства
В управлении демпфированием колебания кузова транспортного средства прежде всего соответствующие скорости перемещения кузова транспортного средства для вертикального колебания, поперечного колебания и продольного колебания, а именно вертикальная скорость Vh, поперечная скорость Vr и продольная скорость Vp, оцениваются на основе абсолютной скорости Vb (VFR, VFL, VRR, VRL) подрессоренных масс, соответствующей каждому из четырех колес 12. В частности, вышеупомянутое вычисляется в соответствии с выражениями ниже относительно расстояния каждого из четырех колес 12 от положения центра тяжести.



В вышеприведенных формулах расстояния от положения центра тяжести кузова транспортного средства до четырех колес 12 являются идентичными и взяты в качестве единичного расстояния. Далее усилие FVh демпфирования вертикального колебания, усилие FVr демпфирования поперечного колебания и усилие FVp демпфирования продольного колебания, которые должны быть сформированы в кузове транспортного средства, для вертикального колебания, поперечного колебания и продольного колебания, соответственно, определяются в соответствии с формулами ниже.


Здесь Ch, Cr и Cp являются коэффициентами демпфирования для вертикального колебания, поперечного колебания и продольного колебания соответственно.
Усилие FVh демпфирования вертикального колебания, усилие FVr демпфирования поперечного колебания и усилие FVp демпфирования продольного колебания, определенные таким образом, распределяются на соответствующие амортизаторы, соответствующие четырем колесам 12, и компоненты FV демпфирования колебания кузова транспортного средства для амортизаторов, соответствующих четырем колесам 12, определяются на основе суммы вышеупомянутых усилий. В частности, соответствующие компоненты FV (FVFR, FVFL, FVRR, FVRL) усилия демпфирования колебания кузова транспортного средства для амортизаторов, соответствующих четырем колесам 12, определяются в соответствии с формулами ниже.




b) Управление подавлением наклона относительно продольной оси при повороте
В управлении подавлением наклона относительно продольной оси при повороте формируется усилие сближения и отдаления в направлении прямого хода в качестве усилия, подавляющего наклон относительно продольной оси, на амортизаторе со стороны внутреннего относительно поворота колеса, и создается усилие сближения и отдаления в направлении обратного хода в качестве усилия, подавляющего наклон относительно продольной оси, на амортизаторе со стороны внешнего относительно поворота колеса. Более конкретно управляющее поперечное ускорение Gy*, являющееся поперечным ускорением, которое используется для управления, определяется в соответствии с формулой ниже, на основе оцененного поперечного ускорения Gyc, которое оценивается на основе скорости v транспортного средства и угла δ поворота рулевого колеса и на основе фактического поперечного ускорения Gyr, которое измеряется посредством датчика 222 поперечного ускорения, в качестве поперечных ускорений, которые являются показателем момента наклона относительно продольной оси, принимаемого кузовом транспортного средства.
Gy*=K1·Gyc+K2·Gyr (K1, K2: коэффициенты усиления) Компонент FR усилия, подавляющего наклон относительно продольной оси, определяется в соответствии с формулой ниже на основе управляющего поперечного ускорения Gy*, определенного таким образом.
FR=K3·Gy* (K3:коэффициент усиления)
с) Управление для подавления наклона относительно поперечной оси при ускорении и замедлении
В управлении для подавления наклона относительно поперечной оси при ускорении и замедлении создается усилие сближения и отдаления в качестве усилия, подавляющего наклон относительно поперечной оси, чтобы подавлять колебание расстояния между подрессоренной и неподрессоренной частями в случае, когда "клевок" возникает во время замедления транспортного средства, например во время торможения, или в случае, когда транспортное средство "приседает" во время ускорения. В частности, фактическое продольное ускорение Gx, измеренное датчиком 220 продольного ускорения, используется в качестве продольного ускорения, которое является показателем момента наклона относительно поперечной оси, действующего на кузов транспортного средства. Компонент FP усилия, подавляющего наклон относительно поперечной оси, определяется в соответствии с выражением ниже на основе фактического продольного ускорения Gx.
FP=K5·Gx (K5: коэффициент усиления) Выполнение управления для подавления наклона относительно поперечной оси при ускорении и замедлении запускается, когда степень открытия дроссельной заслонки, которая обнаруживается посредством датчика дроссельной заслонки, или давление главного тормозного цилиндра, обнаруженное посредством датчика тормозного давления, превышает заданное пороговое значение.
d) Определение целевых значений управления
Целевое усилие F* сближения и отдаления амортизаторов, соответствующих двум задним колесам 12Rr, определяется в соответствии с формулой ниже на основе компонента FV усилия демпфирования колебания кузова транспортного средства, компонента FR усилия, подавляющего наклон относительно продольной оси, и компонента FP усилия, подавляющего наклон относительно поперечной оси усилия сближения или отдаления, после того как вышеупомянутые компоненты были определены, как описано выше.

Целевой угол θ* поворота определяется на основе целевого усилия F* сближения или отдаления благодаря соотношению соответствия между приближающим и отдаляющим усилием и углом поворота мотора. Мотор 252 управляется таким образом, что фактический угол θ поворота мотора, являющийся углом поворота мотора в действительности, становится целевым углом θ* поворота мотора.
Отличительные признаки транспортного средства
В транспортном средстве варианта осуществления, как и в случае транспортного средства 10 первого варианта осуществления, только амортизаторы 250, соответствующие двум задним колесам 12Rr, имеют механизм изменения коэффициента демпфирования, и только амортизаторы 250 со стороны задних колес являются управляемыми. Таким образом, поведение всего кузова транспортного средства может быть эффективно ограничено посредством управления усилием, оказываемым на сравнительно большое перемещение подрессоренной части со стороны задних колес. В транспортном средстве используется управление, которое должно выполняться в транспортном средстве, которое снабжено четырьмя амортизаторами электромагнитного типа, соответствующими четырем колесам, таким образом, достигается действие, посредством которого поведение кузова транспортного средства подавляется без создания новой специализированной системы управления для транспортного средства 10. В транспортном средстве, таким образом, становится возможным улучшать как стабильность при рулении, так и характеристику плавности хода, которые являются взаимно исключающими, сравнительно недорогим образом, поскольку амортизаторы электромагнитного типа не нужно предоставлять на всех колесах.
Перечень ссылочных позиций
10: транспортное средство; 12FR: правое переднее колесо; 12FL: левое переднее колесо; 12RR: правое заднее колесо; 12RL: левое заднее колесо; 20: устройство подвески; 22: нижний рычаг подвески (неподрессоренная часть); 24: крепежная часть (подрессоренная часть); 30: цилиндрическая пружина (пружина подвески); 32Fr: амортизатор со стороны передних колес; 32Rr: амортизатор со стороны задних колес; 40: корпус; 42: поршень; 44: шток поршня; 100: корпус; 102: поршень; 104: шток поршня; 110: механизм изменения коэффициента демпфирования; 120: электромагнитный мотор; 150: просвет; 200: ECU подвески (устройство управления); 220: датчик [Gx] продольного ускорения; 222: датчик [Gy] поперечного ускорения; 224: датчик [Gz] вертикального ускорения; 226: датчик [St] хода; 250: амортизатор; 252: электромагнитный мотор; 262: цилиндрическая пружина (пружина подвески); 270: резьбовой шток; 272: гайка;
ωFr: резонансная частота колебаний подрессоренных масс на стороне передних колес; ωRr: резонансная частота колебаний подрессоренных масс на стороне задних колес; KFr: жесткость пружины на стороне передних колес; KRr: жесткость пружины на стороне задних колес; St: величина хода; Vst: скорость хода; Gz: вертикальное ускорение подрессоренных масс; Vb: абсолютная скорость подрессоренных масс; F*: целевое демпфирующее усилие; C* целевой коэффициент демпфирования.
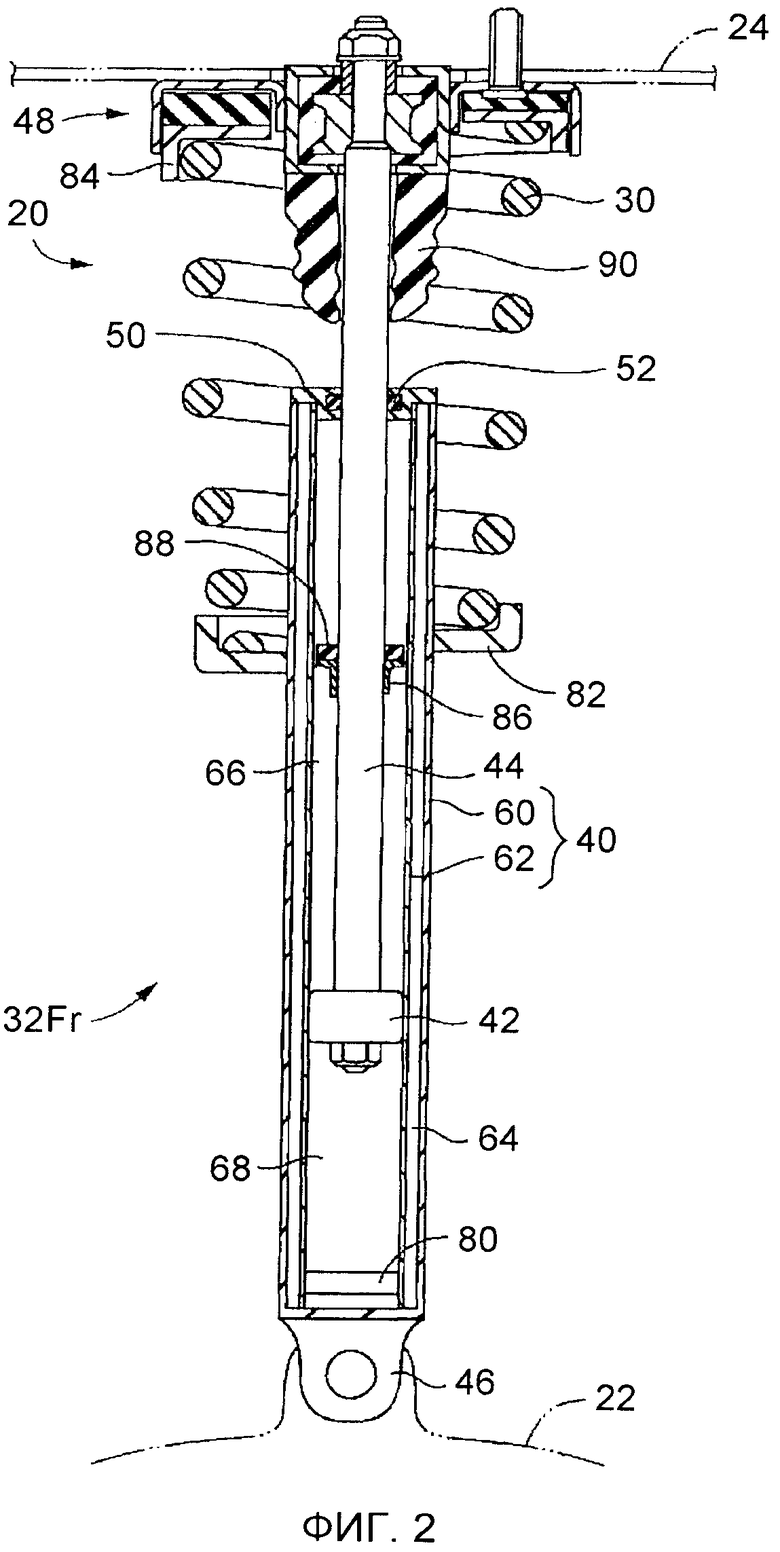



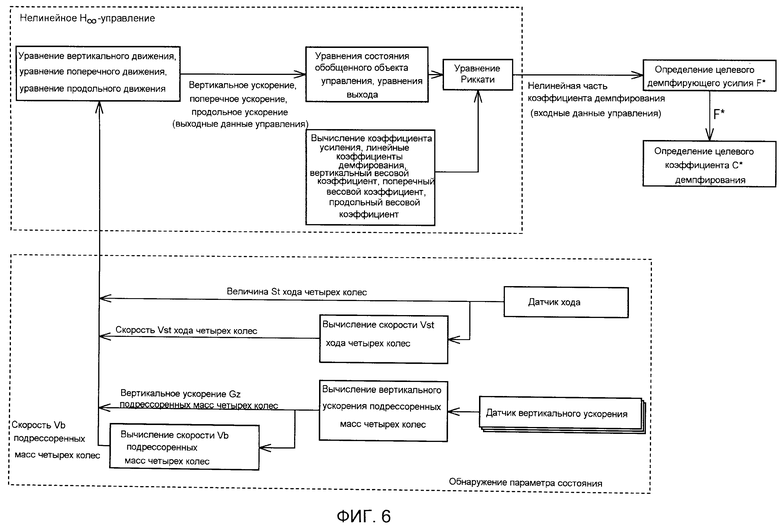
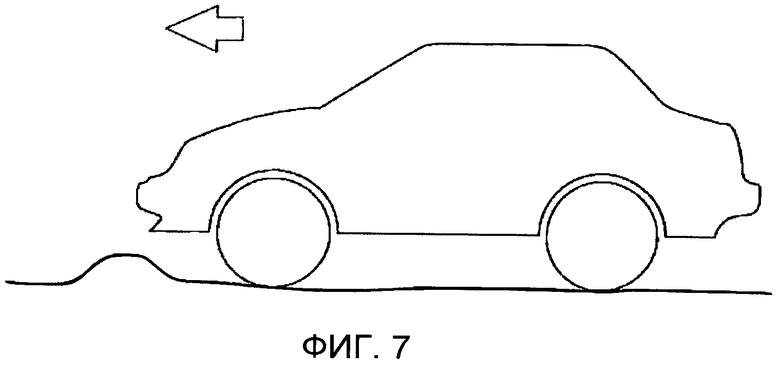

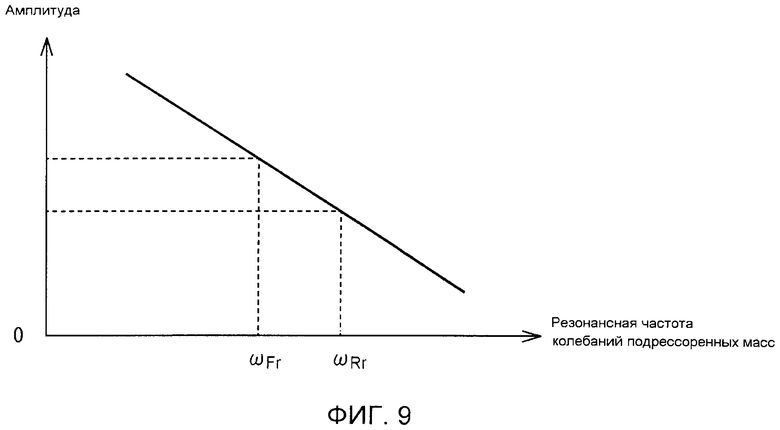
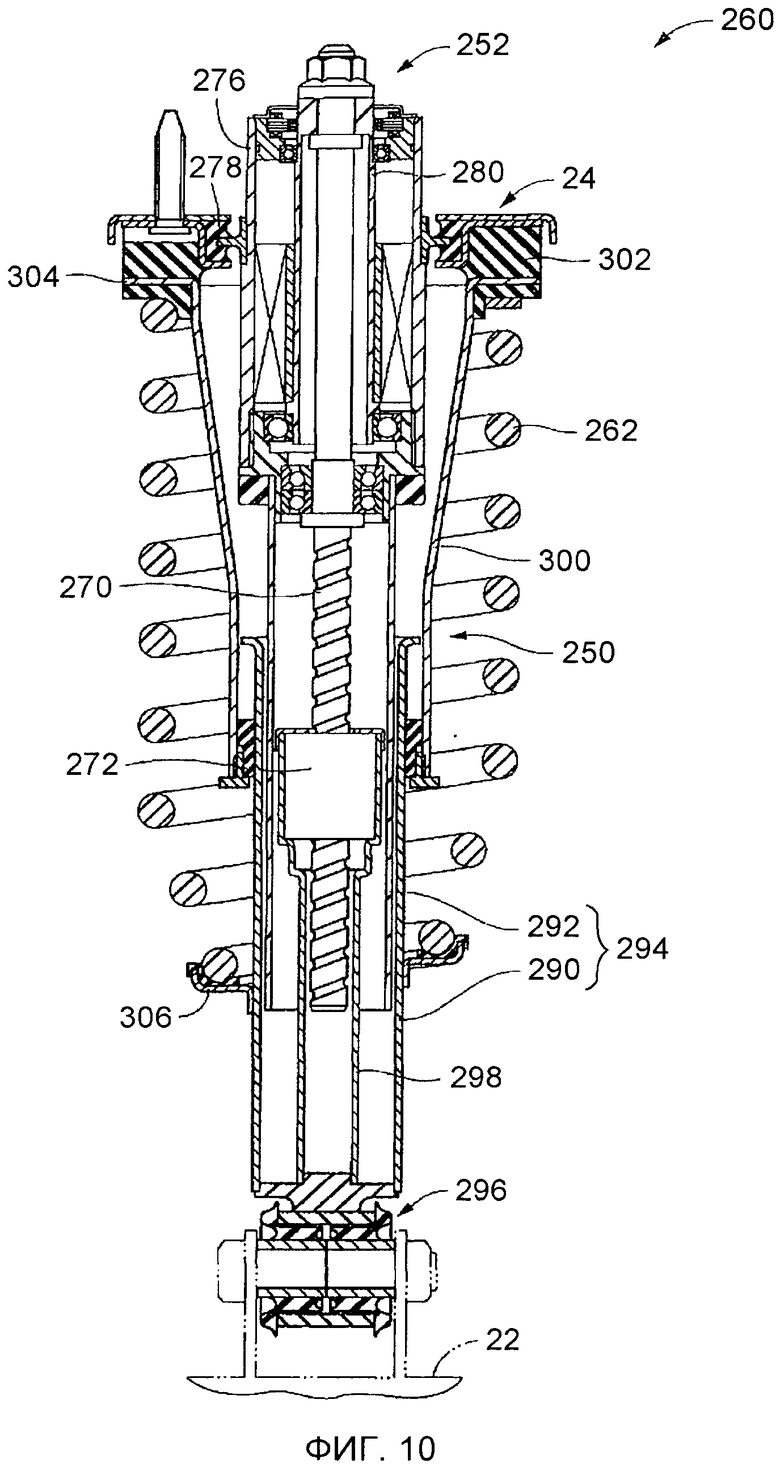
Изобретение относится к транспортному средству. Транспортное средство содержит четыре колеса, четыре пружины подвески и четыре амортизатора. Каждый из амортизаторов формирует демпфирующее усилие, оказываемое на перемещение сближения и отдаления подрессоренной части и неподрессоренной части, соответствующих каждому амортизатору. Жесткость каждой из четырех пружин подвески и распределяемая нагрузка на каждое из четырех колес регулируются таким образом, что резонансная частота колебаний подрессоренных масс со стороны передних колес, соответствующая двум передним колесам, и резонансная частота колебаний подрессоренных масс со стороны задних колес, соответствующая двум задним колесам, отличаются друг от друга. Из четырех амортизаторов только два амортизатора, которые обеспечиваются соответственно для двух колес с пониженной резонансной частотой колебаний подрессоренных масс, из двух передних колес и двух задних колес, имеют соответственно механизмы изменения коэффициента демпфирования, которые изменяют коэффициент демпфирования, который служит в качестве опорного значения величины демпфирующего усилия, формируемого двумя амортизаторами. Достигается улучшение стабильности при рулении и плавности хода. 10 з.п. ф-лы, 10 ил.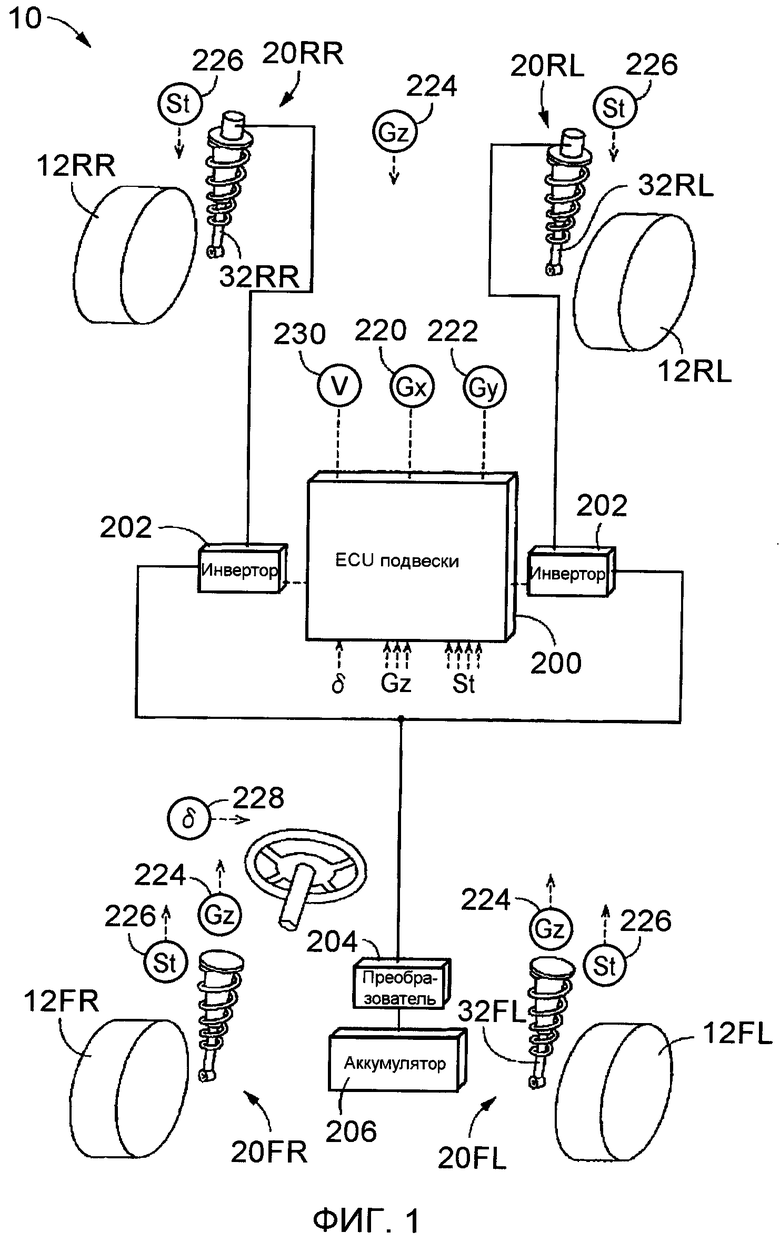
1. Транспортное средство, содержащее:
четыре колеса, два из которых являются передними колесами, расположенными с передней стороны транспортного средства, и два - задними колесами, расположенными с задней стороны транспортного средства;
четыре пружины подвески, обеспеченные соответственно для четырех колес, причем каждая из пружин подвески упруго соединяет подрессоренную часть и неподрессоренную часть, соответствующие каждой пружине подвески; и
четыре амортизатора, обеспеченных соответственно для четырех колес, при этом каждый из амортизаторов формирует демпфирующее усилие, оказываемое на перемещение сближения и отдаления подрессоренной части и неподрессоренной части, соответствующих каждому амортизатору,
причем жесткость пружины каждой из четырех пружин подвески и распределяемая нагрузка на каждое из четырех колес регулируются таким образом, что резонансная частота колебаний подрессоренных масс со стороны передних колес, соответствующая двум передним колесам, и резонансная частота колебаний подрессоренных масс со стороны задних колес, соответствующая двум задним колесам, отличаются друг от друга;
при этом из четырех амортизаторов только два амортизатора, которые обеспечиваются соответственно для двух колес с пониженной резонансной частотой колебаний подрессоренных масс, из двух передних колес и двух задних колес, имеют соответственно механизмы изменения коэффициента демпфирования, которые изменяют коэффициент демпфирования, который служит в качестве опорного значения величины демпфирующего усилия, формируемого двумя амортизаторами.
2. Транспортное средство по п. 1, в котором
жесткость пружины каждой из четырех пружин подвески и распределенная нагрузка на каждое из четырех колес регулируются таким образом, что резонансная частота колебаний подрессоренных масс со стороны задних колес ниже резонансной частоты колебаний подрессоренных масс со стороны передних колес; и
только два амортизатора, соответствующих двум задним колесам, из четырех амортизаторов имеют механизмы изменения коэффициента демпфирования.
3. Транспортное средство по п. 1 или 2, в котором каждый из амортизаторов, имеющих механизм изменения коэффициента демпфирования, из четырех амортизаторов является амортизатором гидравлического типа, имеющим:
(A) корпус, который соединяется с одной из подрессоренной части и неподрессоренной части и который содержит рабочую текучую среду;
(B) поршень, который делит внутреннее пространство корпуса на две камеры для рабочей текучей среды и который выполнен с возможностью скольжения через внутреннее пространство корпуса;
(C) шток поршня, который имеет одну концевую часть, соединенную с поршнем, и другую концевую часть, выступающую из корпуса и соединяющуюся с другой частью из подрессоренной части и неподрессоренной части;
(D) механизм, обеспечивающий циркуляцию рабочей текучей среды, который выполнен в поршне и который обеспечивает циркуляцию рабочей текучей среды между двумя камерами для рабочей текучей среды, получающихся в результате скольжения поршня, в состоянии оказания сопротивления по отношению к циркуляции; и
(E) функционирующий как механизм изменения коэффициента демпфирования механизм изменения сопротивления потока посредством конфигурирования для изменения коэффициента демпфирования посредством изменения величины сопротивления, которое механизм, обеспечивающий циркуляцию рабочей текучей среды, оказывает на циркуляцию рабочей текучей среды.
4. Транспортное средство по п. 1 или 2, в котором каждый из двух амортизаторов, имеющих механизм изменения коэффициента демпфирования, из четырех амортизаторов является амортизатором электромагнитного типа, который имеет электромагнитный мотор и который создает усилие сближения и отдаления, которое является усилием, которое основано на усилии, формируемом электромагнитным мотором и которое оказывается на подрессоренную часть и неподрессоренную часть, соответствующую амортизатору, чтобы передвигать подрессоренную часть и неподрессоренную часть ближе или дальше друг от друга;
при этом механизм изменения коэффициента демпфирования выполнен так, что при создании усилия сближения или отдаления в качестве демпфирующего усилия демпфирующее усилие определяется произведением скорости перемещения сближения и отдаления подрессоренной части и неподрессоренной части и коэффициента усиления, соответствующего этому, и выполнен так, что коэффициент усиления может изменяться.
5. Транспортное средство по п. 3, в котором каждый из двух амортизаторов, исключая два амортизатора, имеющих механизм изменения коэффициента демпфирования, из четырех амортизаторов является амортизатором гидравлического типа, в котором коэффициент демпфирования не может быть изменен.
6. Транспортное средство по п. 1, дополнительно содержащее устройство управления, которое управляет механизмом изменения коэффициента демпфирования каждого из двух амортизаторов из четырех амортизаторов, при этом устройство управления выполнено с возможностью
деления колебания, формируемого в кузове транспортного средства, на компонент вертикального колебания, компонент поперечного колебания и компонент продольного колебания, каждый из которых является одним компонентом колебания, определения целевого демпфирующего усилия, которое является демпфирующим усилием, которое должно быть создано каждым из четырех амортизаторов в соответствии с правилом управления, так что каждый из компонентов колебания демпфируется четырьмя амортизаторами согласованно, и
управления механизмом изменения коэффициента демпфирования каждого из двух амортизаторов таким образом, чтобы выполнять изменение в коэффициенте демпфирования согласно соответствующему целевому демпфирующему усилию.
7. Транспортное средство по п. 6, в котором устройство управления выполнено с возможностью определения, в качестве правила управления, целевого демпфирующего усилия при использовании управления с обратной связью по состоянию, имеющего, в качестве выходных данных управления, вертикальное ускорение, которое является ускорением кузова транспортного средства в вертикальном направлении, поперечного ускорения, которое является угловым ускорением кузова транспортного средства вокруг оси продольного направления, и продольного ускорения, которое является угловым ускорением кузова транспортного средства вокруг оси поперечного направления, для того, чтобы ограничивать вертикальное ускорение, поперечное ускорение и продольное ускорение.
8. Транспортное средство по п. 7, в котором правило управления соответствует теории нелинейного H∞-управления.
9. Транспортное средство по п. 7, в котором правило управления, согласно которому выполняется управление с обратной связью по состоянию, устанавливается на основе уравнений состояния, которые получаются на основе уравнения движения кузова транспортного средства в вертикальном направлении, уравнения движения кузова транспортного средства вокруг оси продольного направления и уравнения движения кузова транспортного средства вокруг оси поперечного направления.
10. Транспортное средство по п. 7, в котором устройство управления выполнено с возможностью использования, в качестве параметров состояния в управлении с обратной связью по состоянию, (a) ускорения подрессоренных масс, которое является ускорением подрессоренной части в вертикальном направлении, (b) скорости подрессоренных масс, которая является скоростью подрессоренной части в вертикальном направлении, (c) относительной величины смещения между подрессоренной частью и неподрессоренной частью в направлении приближения и отдаления и (d) относительной скорости между подрессоренной частью и неподрессоренной частью в направлении приближения и отдаления, соответствующие каждому из четырех колес.
11. Транспортное средство по п. 10, дополнительно содержащее:
три датчика вертикального ускорения, включающих в себя два датчика, которые определяют вертикальное ускорение подрессоренных масс, которое является ускорением подрессоренной части в вертикальном направлении, соответствующим каждому из двух передних колес, и датчик, который определяет ускорение в вертикальном направлении сегмента кузова транспортного средства, расположенного между двумя задними колесами,
причем устройство управления выполнено с возможностью вычисления ускорения подрессоренной части и скорости подрессоренной части, соответствующих каждому из двух задних колес, на основе результатов определения трех датчиков вертикального ускорения.
| JP 2009274644 A, 26.11.2009 | |||
| JP 2009137515 A, 25.06.2009 | |||
| JP 2007038918 A, 15.02.2007 | |||
| JP 2007320363 A, 13.12.2007; |

