Область техники
Настоящее изобретение относится, в общем, к системе подвески, установленной на транспортном средстве и, в частности, к системе подвески для транспортного средства, включающей в себя электромагнитный исполнительный механизм для амортизации колебаний.
Уровень техники
В качестве системы подвески, включающей в себя электромагнитный исполнительный механизм, функционирующий как противоударный демпфер, а именно так называемая электромагнитная система подвески, известна система, описанная, например, в документе WO 02/08001 A1 (далее - Документ 1). Электромагнитная система подвески имеет преимущество в том, что колебания подрессоренной части могут эффективно амортизироваться на основе теории демпфирования типа «skyhook», и активно развивалась в области транспортных средств. В настоящее время реализованы различные теории относительно управления исполнительным механизмом. В электромагнитной системе подвески, описанной в документе JP 2004-237825 А (далее - Документ 2), разработано управление для компенсирования внутренней инерционной силы исполнительного механизма.
Раскрытие изобретения
(A) Сущность изобретения
Например, существует электромагнитный исполнительный механизм, применяемый в электромагнитной системе подвески. Электромагнитный исполнительный механизм включает в себя: (A) блок со стороны подрессоренной части, соединенный с подрессоренной частью; (B) блок со стороны неподрессоренной части, который соединяется с неподрессоренной частью, и который перемещается относительно блока со стороны подрессоренной части в связи с относительным перемещением подрессоренной части и неподрессоренной части по направлению друг к другу и друг от друга; (C) винтовой механизм, включающий в себя шток с резьбой и резьбовую муфту, которые свинчиваются друг с другом, и одна из деталей предусмотрена в блоке со стороны подрессоренной части, при этом другая из деталей предусмотрена со стороны неподрессоренной части, так что шток с резьбой и резьбовая муфта вращаются относительно друг друга в связи с относительным перемещением блока со стороны подрессоренной части и блока со стороны неподрессоренной части; и (D) электромагнитный двигатель, сконфигурированный таким образом, чтобы передавать, одному из штока с резьбой и резьбовой муфты, усилие в отношении относительного вращения штока с резьбой и резьбовой муфты. Исполнительный механизм сконфигурирован, чтобы формировать, на основе силы электромагнитного двигателя, усилие исполнительного механизма, т.е. усилие в отношении относительного перемещения блока со стороны подрессоренной части и блока со стороны неподрессоренной части.
В некоторых случаях электромагнитная система подвески дополнительно включает в себя соединяющий механизм, имеющий специальную структуру, для смягчения толчка или удара, который может наноситься, например, от неподрессоренной части по исполнительному механизму. Соединяющий механизм включает в себя опорную пружину, сконфигурированную так, чтобы разрешать одному из блока со стороны подрессоренной части и блока со стороны неподрессоренной части поддерживаться посредством одной из подрессоренной части и неподрессоренной части, с которой соединяется один из блока со стороны подрессоренной части и блока со стороны неподрессоренной части. Соединяющий механизм сконфигурирован так, чтобы соединять, вследствие силы упругости опорной пружины, один из блока со стороны подрессоренной части и блока со стороны неподрессоренной части и одну из подрессоренной части и неподрессоренной части, в то же время обеспечивая возможность относительного перемещения одного из блока со стороны подрессоренной части и блока со стороны неподрессоренной части и одной из подрессоренной части и неподрессоренной части. То есть соединяющий механизм сконфигурирован для поддержки плавающим образом одного из блока со стороны подрессоренной части и блока со стороны неподрессоренной части пружиной.
Однако в электромагнитной системе подвески, имеющей вышеуказанный соединяющий механизм, один из блока со стороны подрессоренной части и блока со стороны неподрессоренной части колеблется из-за силы инерции одного из блока со стороны подрессоренной части и блока со стороны неподрессоренной части и из-за структуры, в которой один из блока со стороны подрессоренной части и блока со стороны неподрессоренной части упруго поддерживается. Колебания могут снижать комфорт во время движения транспортного средства и мешать устойчивости при рулении транспортным средством, например. Соответственно, подавляя или сдерживания колебания, полезность электромагнитной системы подвески может быть улучшена. Изобретение разработано в свете ситуаций, описанных выше. Следовательно, целью изобретения является улучшение полезности электромагнитной системы подвески, имеющей соединяющий механизм, указанный выше.
Чтобы достигать цели, указанной выше, настоящее изобретение предоставляет систему подвески для транспортного средства, в которой один из блока со стороны подрессоренной части и блока со стороны неподрессоренной части электромагнитного исполнительного механизма упруго поддерживается посредством одной из подрессоренной части и неподрессоренной части, и которая сконфигурирована, чтобы выполнять, при управлении исполнительным механизмом, управление амортизацией колебаний одного из блока со стороны подрессоренной части и блока со стороны неподрессоренной части, которые вызваны структурой, в которой один из блока со стороны подрессоренной части и блока со стороны неподрессоренной части упруго поддерживается посредством одной из подрессоренной части и неподрессоренной части.
Согласно настоящей системе подвески колебания одного из блока со стороны подрессоренной части и блока со стороны неподрессоренной части могут эффективно подавляться, и, таким образом, комфорт во время движения транспортного средства, устойчивость при рулении транспортным средством и т.д. могут быть повышены. Следовательно, настоящее изобретение обеспечивает улучшенную полезность в системе подвески, в которой исполнительный механизм поддерживается посредством одной из подрессоренной части и неподрессоренной части опорной пружиной.
(B) Формы заявляемого изобретения
Будут пояснены различные формы изобретения, которое рассматривается как заявляемое (далее в данном документе называемое "заявляемое изобретение", где уместно). Каждая из форм изобретения нумеруется аналогично пунктам прилагаемой формулы изобретения и зависит от другой формы или форм, где уместно. Это сделано для упрощения понимания заявляемого изобретения, и следует понимать, что комбинации составляющих элементов, которые составляют изобретение, не ограничиваются описанными в последующих формах. То есть следует понимать, что заявляемое изобретение должно истолковываться в свете последующих описаний различных форм и предпочтительных вариантов осуществления. Дополнительно следует понимать, что любая форма, в которой один или более элементов добавляется/добавляются или удаляются из любой из последующих форм, может считаться одной формой заявляемого изобретения.
Форма, в которой признак формы (10) и признак формы (11) выборочно добавлены к форме (1) соответствуют пункту (1) формулы изобретения. Пункты формулы изобретения, соответствующие признакам форм (2)-(18), соответствуют пунктам 2-18 формулы изобретения соответственно.
(1) Система подвески для транспортного средства, содержащая:
электромагнитный исполнительный механизм, включающий в себя: (A) блок со стороны подрессоренной части, соединенный с подрессоренной частью; (B) блок со стороны неподрессоренной части, который соединяется с неподрессоренной частью и который перемещается относительно блока со стороны подрессоренной части в связи с относительным перемещением подрессоренной части и неподрессоренной части по направлении друг к другу и друг от друга; (C) винтовой механизм, включающий в себя шток с резьбой и резьбовую муфту, которые завинчиваются друг с другом, и одна из деталей предусмотрена в блоке со стороны подрессоренной части, при этом другая из деталей предусмотрена в блоке со стороны неподрессоренной части, так что шток с резьбой и резьбовая муфта вращаются относительно друг друга в соответствии с относительным перемещением блока со стороны подрессоренной части и блока со стороны неподрессоренной части; (D) электромагнитный двигатель, сконфигурированный так, чтобы передавать, одному из штока с резьбой и резьбовой муфты, усилие в отношении относительного вращения штока с резьбой и резьбовой муфты, исполнительный механизм сконфигурирован так, чтобы формировать, на основе силы электромагнитного двигателя, усилие исполнительного механизма, т.е. усилие в отношении относительного перемещения блока со стороны подрессоренной части и блока со стороны неподрессоренной части;
соединяющий механизм, который включает в себя опорную пружину для обеспечения возможности одному из блока со стороны подрессоренной части и блока со стороны неподрессоренной части поддерживаться одной из подрессоренной части и неподрессоренной части, с которой упомянутый один из блока со стороны подрессоренной части и блока со стороны неподрессоренной части соединяется, соединяющий механизм сконфигурирован, чтобы соединять, вследствие силы упругости опорной пружины, упомянутый один из блока со стороны подрессоренной части и блока со стороны неподрессоренной части и упомянутую одну из подрессоренной части и неподрессоренной части друг с другом, в то же время обеспечивая возможность относительного перемещения упомянутого одного из блока со стороны подрессоренной части и блока со стороны неподрессоренной части и упомянутой одной из подрессоренной части и неподрессоренной части; и
контроллер, сконфигурированный так, чтобы управлять усилием исполнительного механизма, управляя работой электромагнитного двигателя,
при этом контроллер включает в себя:
часть управления амортизацией колебаний подрессоренной части, сконфигурированную так, чтобы выполнять управление амортизацией колебаний подрессоренной части для формирования, в качестве составляющей усилия исполнительного механизма, усилия, имеющего величину в соответствии со скоростью перемещения подрессоренной части, с тем, чтобы амортизировать колебания подрессоренной части; и
часть управления амортизацией относительных колебаний, сконфигурированную так, чтобы выполнять управление амортизацией относительных колебаний для формирования, в качестве одной составляющей усилия силового исполнительного механизма, усилия, имеющего величину в соответствии с одним из: (a) скорости относительного перемещения блока со стороны подрессоренной части и блока со стороны неподрессоренной части; и (b) скорости относительного перемещения упомянутого одного из блока со стороны подрессоренной части и блока со стороны неподрессоренной части и упомянутой одной из подрессоренной части и неподрессоренной части, с тем, чтобы амортизировать колебания упомянутого одного из блока со стороны подрессоренной части и блока со стороны неподрессоренной части, которые вызываются опорной пружиной.
Система подвески согласно вышеописанной форме (1) имеет вышеуказанную структуру, в которой один из блока со стороны подрессоренной части и блока со стороны неподрессоренной части электромагнитного исполнительного механизма упруго поддерживается посредством одной из подрессоренной части и неподрессоренной части, и система подвески сконфигурирована, чтобы выполнять, при управлении исполнительным механизмом, управление для амортизации колебаний одного из блока со стороны подрессоренной части и блока со стороны неподрессоренной части, вызванных вследствие вышеуказанной упруго поддерживаемой структуры. Согласно форме (1) колебания одного из блока со стороны подрессоренной части и блока со стороны неподрессоренной части могут эффективно ограничиваться, таким образом, комфорт во время движения транспортного средства, устойчивость при рулении транспортным средством и т.д. могут быть повышены. То есть полезность улучшается в системе подвески, имеющей структуру, в которой исполнительный механизм поддерживается посредством одной из подрессоренной части и неподрессоренной части через опорную пружину.
"Электромагнитный исполнительный механизм" в вышеописанной форме (1) отдельно не ограничивается с точки зрения своей структуры, так что может применяться любой электромагнитный исполнительный механизм, который способен функционировать как так называемый электромагнитный противоударный демпфер. Можно применять электромагнитные исполнительные механизмы с известной структурой, которая применяет винтовой механизм. "Винтовой механизм" может быть сконфигурирован так, что любое одно из штока с резьбой и резьбовой муфты становится вращающимся, и исполнительный механизм может быть сконфигурирован так, что электромагнитный двигатель дает вращающую силу одному из штока с резьбой и резьбовой муфты, которое выполнено вращающимся. Каждый из блока со стороны подрессоренной части и блока со стороны неподрессоренной части может быть сконфигурирован, чтобы включать в себя, в качестве своего составляющего элемента, одно из штока с резьбой и резьбовой муфты, которое предусмотрено на нем.
В вышеописанной форме (1) "один из блока со стороны подрессоренной части и блока со стороны неподрессоренной части" исполнительного механизма плавающим образом поддерживается посредством "одной из подрессоренной части и неподрессоренной части" посредством соединяющего механизма, имеющего опорную пружину, указанную выше. В интересах краткости, один из блока со стороны подрессоренной части и блока со стороны неподрессоренной части будет далее в данном документе именоваться "плавающим блоком", при этом другой из блока со стороны подрессоренной части и блока со стороны неподрессоренной части будет далее в данном документе именоваться "неподвижным блоком". Дополнительно, одна из подрессоренной части и неподрессоренной части, с которой соединяется плавающий блок, будет далее в данном документе именоваться "частью поддержки плавающего блока", при этом другая из подрессоренной части и неподрессоренной части, с которой соединяется неподвижный блок, далее в данном документе будет называться "частью поддержки неподвижного блока".
"Часть управления амортизацией колебаний подрессоренной части" контроллера является его функциональной частью, которая выполняет вышеуказанное "управление амортизацией колебаний подрессоренной части", которое основано на так называемой теории работы амортизатора типа «skyhook». В частности, часть управления амортизацией колебаний подрессоренной части может быть сконфигурирована так, чтобы управлять электромагнитным двигателем так, что усилие исполнительного механизма становится равным усилию, полученному как произведение коэффициента усиления системы управления, соответствующего коэффициенту демпфирования амортизатора, который должен быть реализован, и скорости перемещения подрессоренной части, а именно абсолютной скорости подрессоренной части (абсолютной скорости подрессоренной части). Если управление амортизацией колебаний подрессоренной части выполняется для амортизации, в качестве главной цели, колебаний на резонансной частоте и около резонансной частоты подрессоренной части (резонансной частоты амортизации), в частности, комфорт во время движения транспортного средства значительно повышается.
Плавающий блок имеет инерциальную массу и упруго поддерживается плавающим образом частью поддержки плавающего блока посредством опорной пружины соединяющего механизма. Соответственно, плавающий блок колеблется относительно части поддержки плавающего блока. Другими словами, происходят относительные колебания плавающего блока и части поддержки плавающего блока. Вкратце, колебания могут рассматриваться как колебания плавающего блока относительно части поддержки неподвижного блока, а именно относительные колебания плавающего блока и неподвижного блока. Если такие колебания плавающего блока передаются подрессоренной части, водитель транспортного средства чувствует колебания, и комфорт во время движения транспортного средства снижается. Дополнительно, колебания действуют как колебания неподрессоренной части, чтобы вызывает изменение нагрузки, которую колесо передает на землю, и устойчивость при рулении транспортным средством ухудшается. Конструкция согласно форме (1) нацелена на амортизацию колебаний плавающего блока, вызванных опорной пружиной, в попытке пресечь такое явление.
В исполнительном механизме тело вращения, которое вращается в соответствии с относительным перемещением блока со стороны подрессоренной части и блока со стороны неподрессоренной части, состоит из одного из штока с резьбой и резьбовой муфты, которые выполнены вращающимися, ротора электромагнитного двигателя, вращающегося вала двигателя и т.д. Соответственно, вышеуказанная инерциальная масса плавающего блока интерпретируется как включающая в себя не только инерциальную массу в отношении относительного перемещения плавающего блока и части поддержки плавающего блока, а именно инерциальную массу в узком смысле, а также и инерционный момент тела вращения, строго, преобразованную массу, полученную преобразованием инерционного момента в инерциальную массу в отношении относительного перемещения. В зависимости от структуры исполнительного механизма преобразованная масса инерционного момента превышает инерциальную массу в узком смысле.
Функциональная часть контроллера для амортизации вышеуказанных колебаний плавающего блока соответствует "части управления амортизацией относительных колебаний". "Управление амортизацией относительных колебаний", выполняемое частью управления амортизацией относительных колебаний, является управлением для амортизации колебаний плавающего блока, вызванных опорной пружиной, посредством амортизации вышеуказанных относительных колебаний плавающего блока и части поддержки плавающего блока или относительных колебаний плавающего блока и неподвижного блока. Другими словами, выполняется управление, которое зависит от теоретической модели, в которой амортизатор, имеющий подходящий коэффициент демпфирования, расположен между плавающим блоком и частью поддержки плавающего блока или между плавающим блоком и неподвижным блоком. Более конкретно, исполнительный механизм может управляться так, чтобы формировать усилие, соответствующее усилию, которое должно быть сформировано амортизатором. То есть часть управления амортизацией относительных колебаний может быть сконфигурирована так, чтобы управлять электромагнитным двигателем для формирования усилия исполнительного механизма, полученного как произведение коэффициента усиления системы управления, соответствующего коэффициенту демпфирования амортизатора, и относительной скорости перемещения плавающего блока и части поддержки плавающего блока или относительной скорости плавающего блока и неподвижного блока.
(2) Система подвески согласно форме (1), в которой часть управления амортизацией относительных колебаний сконфигурирована так, чтобы выполнять, в качестве управления амортизацией относительных колебаний, управление для формирования усилия, имеющего величину в соответствии со скоростью относительного перемещения упомянутого одного из блока со стороны подрессоренной части и блока со стороны неподрессоренной части и упомянутой одной из подрессоренной части и неподрессоренной части.
В вышеупомянутой форме (2) колебания плавающего блока амортизируется посредством амортизации относительных колебаний плавающего блока и части поддержки плавающего блока. Поскольку опорная пружина размещается между плавающим блоком и частью поддержки плавающего блока, колебания плавающего блока, вызванные опорной пружиной, могут эффективно амортизироваться согласно форме (2).
(3) Система подвески согласно форме (2), в которой часть управления амортизацией относительных колебаний сконфигурирована так, чтобы формировать усилие, имеющее величину в соответствии со скоростью относительного перемещения упомянутого одного из блока со стороны подрессоренной части и блока со стороны неподрессоренной части и упомянутой одной из подрессоренной части и неподрессоренной части на основе скорости вращения электромагнитного двигателя и скорости относительного перемещения подрессоренной части и неподрессоренной части.
Вышеописанная форма (3) является более конкретной формой для амортизации относительных колебаний плавающего блока и части поддержки плавающего блока. В вышеописанной форме (3) выполняется управление, которое косвенно основано на скорости относительного перемещения плавающего блока и части поддержки плавающего блока, используя скорость относительного перемещения плавающего блока и неподвижного блока и скорость относительного перемещения части поддержки плавающего блока и части поддержки неподвижного блока, без непосредственного использования скорости относительного перемещения плавающего блока и части поддержки плавающего блока.
Величина вращения электромагнитного двигателя соответствует величине относительного перемещения блока со стороны подрессоренной части и блока со стороны неподрессоренной части. При управлении электромагнитным двигателем величина его вращения обычно обнаруживается. В то же время большинство электромагнитных систем подвески включают в себя датчик для измерения расстояния между подрессоренной частью и неподрессоренной частью (далее в данном документе называемого "расстоянием между подрессоренной и неподрессоренной частью", где уместно), а именно датчик величины хода. Согласно форме (3) управление амортизацией относительных колебаний может легко выполняться без обеспечения каких-либо дополнительных датчиков.
(4) Система подвески согласно форме (1), в которой часть управления амортизацией относительных колебаний сконфигурирована так, чтобы выполнять, в качестве управления амортизацией относительных колебаний, управление для формирования усилия, имеющего величину в соответствии со скоростью относительного перемещения блока со стороны подрессоренной части и блока со стороны неподрессоренной части.
В вышеупомянутой форме (4) колебания плавающего блока амортизируются посредством амортизации относительных колебаний плавающего блока и неподвижного блока. Пока опорная пружина размещается между плавающим блоком и частью поддержки плавающего блока, колебания плавающего блока, вызванные опорной пружиной, могут рассматриваться как относительные колебания плавающего блока и неподвижного блока. Следовательно, колебания плавающего блока могут быть легко амортизированы согласно форме (4).
(5) Система подвески согласно форме (4), в которой часть управления амортизацией относительных колебаний сконфигурирована так, чтобы формировать усилие, имеющее величину в соответствии со скоростью относительного перемещения блока со стороны подрессоренной части и блока со стороны неподрессоренной части, на основе скорости вращения электромагнитного двигателя.
Вышеописанная форма (5) является более конкретной формой для амортизации относительных колебаний плавающего блока и неподвижного блока. Как объяснено выше, величина вращения электромагнитного двигателя обычно обнаруживается при управлении им. Согласно форме (5) управление амортизацией относительных колебаний может выполняться более легко посредством простого получения скорости вращения электромагнитного двигателя без обеспечения каких-либо дополнительных датчиков.
(6) Система подвески согласно любой из форм (1)-(5), в которой часть управления амортизацией относительных колебаний сконфигурирована так, чтобы выполнять, в качестве управления амортизацией относительных колебаний, управление для ограничения явления резонанса упомянутого одного из блока со стороны подрессоренной части и блока со стороны неподрессоренной части, которое вызывается опорной пружиной соединяющего механизма.
В случае, когда тело с инерциальной массой поддерживается пружиной, явление резонанса происходит при колебаниях, имеющих собственную частоту, которая зависит от инерциальной массы тела с инерциальной массой и жесткости пружины. Колебания с и около частоты, где происходит явление резонанса, в значительной степени ухудшают выше поясненный комфорт во время движения и устойчивость при рулении транспортным средством. Соответственно, желательно ограничивать, по меньшей мере, явление резонанса. Наоборот, комфорт во время движения и устойчивость при рулении транспортным средством могут быть эффективно повышены посредством пресечения явления резонанса. В свете вышесказанного, цель управления амортизацией относительных колебаний направлена, в форме (6), на ограничение явления резонанса плавающего блока. В форме (6) коэффициент демпфирования амортизатора в теоретической модели, поясненной выше, может быть установлен в подходящее значение для ограничения явления резонанса. Другими словами, часть управления амортизацией относительных колебаний может быть сконфигурирована, чтобы управлять электромагнитным двигателем так, чтобы формировать усилие исполнительного механизма, которое получается как произведение коэффициента усиления системы управления, соответствующего подходящему коэффициенту амортизации, и скорости относительного перемещения плавающего блока и части поддержки плавающего блока или скорости относительного перемещения плавающего блока и неподвижного блока.
(7) Система подвески согласно любой из форм (1)-(6), в которой контроллер дополнительно включает в себя часть (370) управления амортизацией колебаний неподрессоренной части, сконфигурированную, чтобы выполнять управление амортизацией колебаний неподрессоренной части для формирования, в качестве одной составляющей усилия исполнительного механизма, усилия, имеющего величину в соответствии со скоростью перемещения неподрессоренной части, для амортизации колебаний неподрессоренной части.
В вышеописанной форме (7) "управление амортизацией колебаний неподрессоренной части" выполняется в дополнение к вышеуказанному управлению амортизацией колебаний подрессоренной части как основному управлению исполнительным механизмом. В частности, желательно иметь дело с колебаниями неподрессоренной части с или около резонансной частоты неподрессоренной части (резонансная частота неподрессоренной части). Когда передача колебаний неподрессоренной части к подрессоренной части подавляется, комфорт во время движения транспортного средства повышается. Дополнительно, когда колебания неподрессоренной части подавляются, устойчивость при рулении транспортным средством улучшается.
(8) Система подвески согласно любой из форм (1)-(7), в которой контроллер дополнительно включает в себя часть (202) управления ограничением изменения положения кузова, сконфигурированную так, чтобы выполнять, для ограничения, по меньшей мере, одного из наклона относительно поперечной оси и наклона относительно продольной оси кузова транспортного средства, управление ограничением изменения положения кузова для формирования, в качестве составляющей усилия исполнительного механизма, противодействующей силы против действующей силы, которая действует на кузов транспортного средства как причина, по меньшей мере, одного из наклона относительно поперечной оси и наклона относительно продольной оси, противодействующая сила имеет величину в соответствии с действующей силой.
В вышеупомянутой форме (8) система подвески снабжена функцией ограничения наклона относительно продольной оси кузова транспортного средства, который возникает из поворота транспортного средства, и наклона относительно поперечной оси кузова транспортного средства, который возникает от ускорения и торможения транспортного средства, например. Когда, по меньшей мере, одно из наклона относительно продольной оси и наклона относительно поперечной оси кузова транспортного средства ограничивается посредством "управления ограничением изменения положения кузова", комфорт во время движения транспортного средства становится гораздо выше.
(9) Система подвески согласно любой из форм (1)-(8), в которой опорная пружина сконфигурирована так, чтобы обеспечивать возможность блоку со стороны неподрессоренной части в качестве упомянутого одного из блока со стороны подрессоренной части и блока со стороны неподрессоренной части поддерживаться неподрессоренной частью в качестве упомянутой одной из подрессоренной части и неподрессоренной части, причем соединяющий механизм сконфигурирован так, чтобы соединять блок со стороны неподрессоренной части и неподрессоренную часть, вследствие силы упругости опорной пружины, в то же время обеспечивая возможность относительного перемещения блока со стороны неподрессоренной части и неподрессоренной части, при этом часть управления амортизацией относительных колебаний сконфигурирована так, чтобы выполнять, в качестве управления амортизацией относительных колебаний, управление для формирования усилия, имеющего величину в соответствии с одним из (a) скорости относительного перемещения блока со стороны подрессоренной части и блока со стороны неподрессоренной части; и (b) скорости относительного перемещения блока со стороны неподрессоренной части и неподрессоренной части с тем, чтобы амортизировать колебания блока со стороны неподрессоренной части.
В вышеописанной форме (9) блок со стороны неподрессоренной части функционирует как плавающий блок, указанный выше, при этом неподрессоренная часть функционирует как часть поддержки плавающего блока. Согласно форме (9) соединяющий механизм размещается между неподрессоренной частью и исполнительным механизмом, таким что удар, который должен наноситься от неподрессоренной части исполнительному механизму, особенно, удар, который должен наноситься электромагнитному двигателю, может быть эффективно смягчен соединяющим механизмом.
(10) Система подвески согласно любой из форм (1)-(9), дополнительно содержащая основную пружину (256), сконфигурированную так, чтобы соединять, вследствие своей силы упругости, подрессоренную часть и неподрессоренную часть.
(11) Система подвески согласно любой из форм (1)-(9) дополнительно содержит соединяющую пружину (46), сконфигурированную так, чтобы соединять, вследствие своей силы упругости, (a) упомянутый один из блока со стороны подрессоренной части и блока со стороны неподрессоренной части и (b) другую из подрессоренной части и неподрессоренной части, с которой другой из блока со стороны подрессоренной части и блока со стороны неподрессоренной части соединяется.
В вышеописанных двух формах (10) и (11) добавлено ограничение относительно пружины, которая соединяет подрессоренную часть и неподрессоренную часть, а именно ограничение относительно так называемой пружины подвески. В первой форме основная пружина функционирует как пружина подвески, а опорная пружина соединяющего механизма размещается параллельно с основной пружиной. В последней форме соединяющая пружина и опорная пружина располагаются последовательно друг с другом, и две пружины работают совместно друг с другом, чтобы функционировать как пружина подвески.
Последняя форма может рассматриваться как форма, в которой плавающий блок плавающим образом поддерживается также другим из блока со стороны подрессоренной части и блока со стороны неподрессоренной части через соединяющую пружину. То есть в последней форме вышеуказанные колебания плавающего блока формируются под влиянием силы упругости соединяющей пружины.
(12) Система подвески согласно любой из форм (1)-(11) дополнительно содержит гидравлический амортизатор (52), сконфигурированный так, чтобы формировать противодействующую силу против относительного перемещения подрессоренной части и неподрессоренной части.
(13) Система подвески согласно любой из форм (1)-(12), в которой соединяющий механизм включает в себя гидравлический амортизатор (290), сконфигурированный так, чтобы формировать противодействующую силу против относительного перемещения упомянутого одного из блока со стороны подрессоренной части и упомянутой одной из подрессоренной части и неподрессоренной части.
В каждой из вышеописанных двух форм (12) и (13) дополнительно размещается гидравлический амортизатор. В первой из двух форм гидравлический амортизатор размещается в позиции, аналогичной позиции, в которой размещается традиционный гидравлический противоударный демпфер. В последней из двух форм, наоборот, гидравлический амортизатор размещается параллельно с вышеуказанной опорной пружиной.
Поскольку колебания подрессоренной части способны амортизироваться посредством выполнения вышеуказанного управления амортизацией колебаний подрессоренной части, функционирование каждого из гидравлических амортизаторов в вышеописанных двух формах может быть приспособлено, чтобы иметь дело с колебаниями неподрессоренной части, например. Соответственно, каждый амортизатор может быть сконфигурирован, чтобы иметь коэффициент демпфирования, подходящий для ограничения передачи колебаний неподрессоренной части к подрессоренной части или для ограничения колебаний неподрессоренной части. Когда амортизатор работает, чтобы иметь дело с колебаниями, имеющими частоту, равную или находящуюся около резонансной частоты неподрессоренной части, в частности, такие характеристики, как комфорт во время вождения и устойчивость при рулении транспортным средством могут быть эффективно повышены. Гидравлический амортизатор в первой из двух форм может формировать определенное амортизирующее усилие в отношении относительных колебаний подрессоренной части и неподрессоренной части, даже когда происходит отказ исполнительного механизма. Соответственно, первая форма лучше с точки зрения отказоустойчивости.
В случае, когда исполнительный механизм плавающим образом поддерживается опорной пружиной, усилие исполнительного механизма действует на подрессоренную часть и неподрессоренную часть через опорную пружину. Соответственно, существует определенное временное запаздывание от момента времени, в который выдается команда формирования определенной величины усилия исполнительного механизма, до момента времени, в который усилие исполнительного механизма фактически действует на подрессоренную часть и неподрессоренную часть. Вкратце, присутствие опорной пружины ухудшает быстроту реакции в управлении исполнительным механизмом до определенной степени. Гидравлический амортизатор в последней из двух форм может быть расположен с целью улучшения быстроты реакции.
(14) Система подвески согласно любой из форм (1)-(13), в которой часть управления амортизацией относительных колебаний сконфигурирована так, чтобы выполнять управление амортизацией относительных колебаний только в ситуации, в которой составляющая интенсивности колебаний упомянутого одного из блока со стороны подрессоренной части и блока со стороны неподрессоренной части относительно конкретной частоты выше, чем пороговое значение.
(15) Система подвески согласно форме (14), в которой часть управления амортизацией относительных колебаний сконфигурирована так, чтобы выполнять, в качестве управления амортизацией относительных колебаний, управление для ограничения явления резонанса упомянутого одного из блока подрессоренной части и блока неподрессоренной части, которое вызывается опорной пружиной соединяющего механизма, и сконфигурирована так, чтобы выполнять управление только в ситуации, в которой составляющая интенсивности колебаний относительно резонансной частоты в явлении резонанса в качестве конкретной частоты выше, чем пороговое значение.
Кратко, в вышеописанных двух формах (14) и (15) выполнение управления амортизацией относительных колебаний ограничивается в связи с частотой колебаний плавающего блока. Когда управление амортизацией относительных колебаний приспособлено выполняться только в ситуации, в которой колебания плавающего блока происходят в конкретном частотном диапазоне или заметны, возможно уменьшать нагрузку, относящуюся к управлению. Например, одна конфигурация вышеописанных двух форм соответствует конфигурации, в которой управление амортизацией относительных колебаний выполняется только в ситуации, в которой комфорт во время движения транспортного средства, устойчивость при рулении транспортным средством и т.д., страдают от относительно большого неблагоприятного воздействия. В последней из двух форм выполнение управления амортизацией относительных колебаний ограничивается так, что управление амортизацией относительных колебаний выполняется, главным образом, для амортизации колебаний плавающего блока в диапазоне резонансных частот. Даже когда управление амортизацией относительных колебаний выполняется только в ситуации, в которой колебания происходят в диапазоне резонансных частот или заметны, как изложено в форме, комфорт во время движения транспортного средства и устойчивость при рулении транспортным средством могут быть обеспечены в достаточной степени.
Ситуация, в которой определенная частотная составляющая интенсивности колебаний плавающего блока становится выше, чем пороговое значение, может оцениваться с точки зрения амплитуды, скорости и т.д. определенных колебаний. Более конкретно, оценка может быть выполнена относительно абсолютных колебаний плавающего блока, относительных колебаний плавающего блока и части поддержки плавающего блока или части поддержки неподвижного блока, например. Дополнительно, оценка может быть выполнена на основе интенсивности, а именно амплитуды, скорости и т.д. каждого из колебаний подрессоренной части или неподрессоренной части, относительных колебаний подрессоренной части и неподрессоренной части, относительных колебаний блока со стороны подрессоренной части и блока со стороны неподрессоренной части и т.д. Следовательно, любое из этих различных колебаний может быть выбрано в качестве цели оценки того, допустимо выполнение управления амортизацией относительных колебаний или нет. Действительно ли конкретная частотная составляющая интенсивности колебаний плавающего блока выше, чем пороговое значение, или нет, может быть оценено на основе конкретной частотной составляющей интенсивности колебаний, выбранной в качестве цели для оценки того, допустимо или нет выполнение управления амортизацией относительных колебаний, или может быть оценено на основе составляющей интенсивности колебаний в подходящем частотном диапазоне, который включает в себя частоты вокруг частоты. Например, составляющая величина интенсивности колебаний в конкретном частотном диапазоне может быть получена или оценена первоначально посредством непрерывного обнаружения параметров, указывающих состояние колебаний, таких как скорость перемещения плавающего блока относительно части поддержки плавающего блока или неподвижного блока, скорости вращения электромагнитного двигателя и относительной скорости перемещения блока со стороны подрессоренной части и блока со стороны неподрессоренной части, и затем процесса фильтрации обнаруженного результата. На основе полученного таким образом или оцененного значения может быть оценено, допустимо или нет выполнение управления амортизацией относительных колебаний.
(16) Система подвески согласно любой из форм (1)-(15), дополнительно содержащая механизм (150, 314) ограничения относительного смещения, сконфигурированный так, чтобы ограничивать относительное смещение упомянутой одной из подрессоренной части и неподрессоренной части при их относительном перемещении.
Если диапазон перемещения, в пределах которого плавающий блок перемещается относительно части поддержки плавающего блока, выполнен большим, соединяющий механизм имеет тенденцию быть большим по размеру, например. То есть длина соединяющего механизма, которая измеряется в направлении, в котором подрессоренная часть и неподрессоренная часть соединяются, увеличивается, вызывая увеличение в размере системы подвески. Тем временем, если диапазон перемещения задается большим посредством уменьшения жесткости опорной пружины, может быть возможность того, что усилие исполнительного механизма не действует на подрессоренную часть и неподрессоренную часть с подходящей быстротой реакции. В свете вышесказанного диапазон перемещения плавающего блока желательно ограничивается до определенной степени. Вышеописанная форма (16) основана на таком требовании. Структура "механизма ограничения относительного смещения", в общем, не ограничена. Например, механизм ограничения относительного смещения может быть реализован посредством обеспечения стопора для препятствования перемещению плавающего блока за счет соприкосновением части плавающего блока со стопором.
(17) Система подвески согласно форме (16), в которой часть управления амортизацией относительных колебаний сконфигурирована так, что коэффициент усиления системы управления, установленный для усилия, которое должно быть сформировано исполнительным механизмом при управлении амортизацией относительных колебаний, задан большим в случае, когда величина относительного смещения упомянутого одного из блока со стороны подрессоренной части и блока со стороны неподрессоренной части и упомянутой одной из подрессоренной части и неподрессоренной части при их относительном перемещении превышает пороговое значение, чем в случае, когда величина относительного смещения не превышает пороговое значение.
(18) Система подвески согласно форме (16) или (17), в которой часть управления амортизацией относительных колебаний сконфигурирована так, что коэффициент усиления системы управления, установленный для усилия, которое должно быть сформировано исполнительным механизмом при управлении амортизацией относительных колебаний, увеличивается с увеличением величины относительного смещения упомянутого одного из блока со стороны подрессоренной части и блока со стороны неподрессоренной части и упомянутой одной из подрессоренной части и неподрессоренной части при их относительном перемещении.
В случае, когда вышеуказанный механизм ограничения относительного смещения предусмотрен, перемещение плавающего блока предотвращается на одном конце его диапазона перемещения. Когда механизм ограничения относительного смещения включает в себя стопор, описанный выше, происходит некоторый небольшой удар из-за стопора, который работает на одном конце диапазона перемещения. Если водитель ощущает удар как колебания и воспринимает удар как звук удара, комфорт во время вождения может ухудшаться. Таким образом, предоставление механизма ограничения относительного смещения может давать неблагоприятный эффект.
Вышеописанные две формы (17) и (18) реализованы для уменьшения неблагоприятного эффекта вследствие обеспечения механизма ограничения относительного смещения. Первая из двух форм включает в себя структуру, в которой, когда плавающий блок перемещается близко к одному концу диапазона перемещения, усилие исполнительного механизма, которое должно быть сформировано при управлении амортизацией относительных колебаний, становится большим, таким образом, относительно большая сила сопротивления действует на перемещение плавающего блока, например, по направлению к одному концу диапазона перемещения. Согласно структуре не допускается достижения плавающим блоком одного конца, или вышеуказанный удар, формируемый при достижении, может быть небольшим. Последняя из двух форм может быть реализована так, что усилие исполнительного механизма, которое должно быть сформировано при управлении амортизацией относительных колебаний, увеличивается, когда плавающий блок перемещается ближе к одному концу диапазона перемещения, а именно усилие исполнительного механизма увеличивается с уменьшением расстояния между плавающим блоком и одним концом диапазона перемещения. Согласно структуре, плавающий блок предохраняется от достижения одного конца или вышеуказанный удар, формируемый при достижении, может быть небольшим, как и в первой из двух форм.
Вышеописанные две формы могут быть объединены. То есть усилие исполнительного механизма, которое должно формироваться при управлении амортизацией относительных колебаний, может увеличиваться, когда величина относительного смещения плавающего блока и части поддержки плавающего блока превышает пороговое значение, и степень увеличения усилия исполнительного механизма может постепенно увеличиваться, когда плавающий блок перемещается ближе к одному концу диапазона перемещения.
Краткое описание чертежей
Фиг. 1 - схематический вид, показывающий общую структуру системы подвески транспортного средства согласно первому варианту осуществления;
Фиг. 2 - вид спереди, показывающий устройство подвески, предусмотренное для заднего колеса в системе подвески с фиг. 1;
Фиг. 3 - вид в поперечном разрезе, показывающий пружину подвески, электромагнитный исполнительный механизм и гидравлический амортизатор, которые составляют устройство подвески с фиг. 2;
Фиг. 4 - увеличенный вид в поперечном разрезе гидравлического амортизатора, показанного на фиг. 3;
Фиг. 5(a)-5(c) - схематические виды, каждый из которых показывает модель колебаний в отношении устройства подвески с фиг. 2;
Фиг. 6 - график, показывающий характеристику передачи колебаний устройства подвески с фиг. 2;
Фиг. 7 - график, схематически показывающий составляющую интенсивности относительных колебаний блока со стороны неподрессоренной части электромагнитного исполнительного механизма, показанного на фиг. 3, в конкретном частотном диапазоне;
Фиг. 8 - график, показывающий поправочный коэффициент усилия исполнительного механизма для амортизации относительных колебаний блока со стороны неподрессоренной части электромагнитного исполнительного механизма, показанного на фиг. 3, и неподрессоренной части;
Фиг. 9 - блок-схема последовательности операций программы управления исполнительным механизмом для управления электромагнитным исполнительным механизмом, показанным на фиг. 3;
Фиг. 10 - блок-схема последовательности операций подпрограммы для определения составляющей амортизации колебаний подрессоренной части, выполняемой в программе с фиг. 9;
Фиг. 11 - блок-схема последовательности операций подпрограммы для определения составляющей ограничения изменения положения кузова, выполняемой в программе с фиг. 9;
Фиг. 12 - блок-схема последовательности операций подпрограммы для определения первой составляющей амортизации относительных колебаний, выполняемой в программе с фиг. 9;
Фиг. 13 - блок-схема последовательности операций подпрограммы для определения второй составляющей амортизации относительных колебаний, выполняемой в программе с фиг. 9;
Фиг. 14 - блок-схема, показывающая функциональную структуру контроллера системы подвески с фиг. 1;
Фиг. 15 - вид в поперечном разрезе, показывающий узел "пружина-исполнительный механизм", применяемый в устройстве подвески системы подвески согласно второму варианту осуществления;
Фиг. 16(a)-16(b) - схематические виды, каждый из которых показывает модель колебаний в отношении устройства подвески системы подвески согласно второму варианту осуществления;
Фиг. 17 - блок-схема последовательности операций программы управления исполнительным механизмом для управления электромагнитным исполнительным механизмом узла "пружина-исполнительный механизм", показанного на фиг. 15;
Фиг. 18 - блок-схема последовательности операций подпрограммы для определения составляющей амортизации колебаний неподрессоренной части, выполняемой в программе с фиг. 17; и
Фиг. 19 - блок-схема, показывающая функциональную структуру контроллера системы подвески на фиг. 15.
Варианты осуществления изобретения
Далее будут подробно пояснены варианты осуществления согласно заявляемому изобретению со ссылкой на чертежи. Однако следует понимать, что заявляемое изобретение не ограничивается деталями последующих вариантов осуществления, а может быть осуществлено с различными изменениями и модификациями, такими как описанные в формах заявляемого изобретения, которые могут прийти на ум специалистам в области техники.
1. Первый вариант осуществления
(A) Структура системы подвески
Как показано на фиг. 1, система подвески для транспортного средства согласно первому варианту осуществления включает в себя четыре устройства 20 подвески, предусмотренных с тем, чтобы соответствовать соответствующим четырем колесам 12, т.е. переднему левому колесу, переднему правому колесу, заднему левому колесу и заднему правому колесу, и систему управления, которая контролирует управление устройств 20 подвески. Два из четырех устройств 20 подвески для соответствующих двух передних колес, которые могут управляться рулевым механизмом, по существу, идентичны по конструкции с другими двумя из четырех устройств 20 подвески для соответствующих двух задних колес, которые не могут управляться, кроме механизма, который позволяет колесам управляться рулевым механизмом. Соответственно, структура устройств 20 подвески будет пояснена, фокусируясь на одном из двух устройств 20 подвески для задних колес.
i) Структура устройства подвески
Как показано на фиг. 2, каждое устройство 20 подвески является устройством независимого типа и многорычажного типа. Устройство 20 подвески включает в себя первый верхний рычаг 30, второй верхний рычаг 32, первый нижний рычаг 34, второй нижний рычаг 36 и рычаг 38 регулирования схождения, каждый в качестве рычага подвески. Один конец каждого из пяти рычагов 30, 32, 34, 36, 38 соединен с возможностью поворота с кузовом транспортного средства, при этом его другой конец соединен с возможностью поворота со ступицей 40 полуоси, который удерживает с возможностью вращения соответствующее одно из четырех колес 12. Благодаря пяти рычагам 30, 32, 34, 36, 38 ступица 40 полуоси имеет возможность вертикально перемещаться относительно кузова транспортного средства, по существу, вдоль постоянной траектории.
Устройство 20 подвески включает в себя две винтовых пружины 46, 48 сжатия, расположенных последовательно друг с другом, электромагнитный исполнительный механизм 50; и гидравлический амортизатор 52. Две винтовые пружины 46, 48 сжатия работают совместно друг с другом, чтобы функционировать в качестве пружины подвески для упругого соединения подрессоренной части и неподрессоренной части. Исполнительный механизм 50 функционирует как противоударный демпфер и размещается между установочной частью 54 в качестве одного составляющего элемента подрессоренной части и вторым нижним рычагом 36 в качестве одного составляющего элемента неподрессоренной части.
ii) Структура электромагнитного исполнительного механизма
Как показано на фиг. 3, исполнительный механизм 50 каждого устройства 20 подвески включает в себя внешнюю трубу 60 и внутреннюю трубу 62, которая вставлена во внешнюю трубу 60 с тем, чтобы выдаваться вверх из верхней крайней части внешней трубы 60. Как далее пояснено более подробно, внешняя труба 60 соединяется со вторым нижним рычагом 36 через соединяющий механизм 64, который включает в себя винтовую пружину сжатия 48 в качестве своего составляющего элемента, при этом внутренняя труба 62 соединяется в своей верхней крайней части с установочной частью 54.
Внешняя труба 60 имеет на поверхности своей внутренней стенки пару направляющих пазов 66, которые проходят в направлении оси исполнительного механизма 50, при этом внутренняя труба 62 имеет пару направляющих выступов 68, прикрепленных к ее нижней крайней части. Пара направляющих выступов 68 вставляются в пару направляющих пазов 66, посредством чего внешней трубе 60 и внутренней трубе 62 предоставляется возможность относительно перемещаться в направлении оси, в то же время не имея возможности вращаться относительно друг друга. Пылезащитное уплотнение 70 прикрепляется к верхней крайней части внешней трубы 60 для предотвращения попадания пыли, грязи и т.п. извне.
Исполнительный механизм 50 включает в себя полость, шток 72 с наружной резьбой, резьбовую муфту 74, которая содержит в себе шарики подшипника и которая навинчивается на шток 72 с резьбой, и электромагнитный двигатель 76 (далее в данном документе просто именуемый "электродвигателем 76", где уместно).
Электродвигатель 76 неподвижно установлен в корпусе 78 электродвигателя. Корпус 78 электродвигателя прикрепляется своей фланцевой частью к верхней стороне установочной части 54, посредством чего корпус 78 электродвигателя прикрепляется к установочной части 54. К фланцевой части корпуса 78 электродвигателя прикрепляется верхняя крайняя часть внешней трубы 60, имеющая фланцевидную форму. Согласно структуре внешняя труба 60 неподвижно соединяется с установочной частью 54.
Вал 80 электродвигателя, который является вращающимся валом электродвигателя 76, является полым валом и соединяется, как неотъемлемая часть, с верхней крайней частью штока 72 с резьбой. То есть шток 72 с резьбой размещается во внутренней трубе 62 с тем, чтобы непрерывно протягиваться от вала 80 электродвигателя, и к нему прикладывается сила вращения от электродвигателя 76. Цилиндрический опорный элемент 82 прикреплен к внутренней нижней части внешней трубы 60 так, что шток 72 с резьбой размещается в цилиндрическом опорном элементе 82, а резьбовая муфта 74 прикрепляется к верхней крайней части цилиндрического опорного элемента 82. Шток 72 с резьбой завинчивается в резьбовую муфту 74, которая прикреплена к цилиндрическому опорному элементу 82, и работает совместно с резьбовой муфтой 74, чтобы составлять винтовой механизм 84.
Согласно структуре, указанной выше, исполнительный механизм 50 имеет блок 86 со стороны подрессоренной части, включающий в себя внутреннюю трубу 62, корпус 78 электродвигателя, электродвигатель 76, шток 72 с резьбой и т.д.; и блок 88 со стороны неподрессоренной части, включающий в себя внешнюю трубу 60, цилиндрический опорный элемент 82, резьбовую муфту 74 и т.д. Исполнительный механизм 50 сконфигурирован так, что блок 86 со стороны подрессоренной части и блок 88 со стороны неподрессоренной части движутся относительно друг друга, и шток 72 с резьбой и электродвигатель 76 вращаются, в связи с относительным перемещением подрессоренной части и неподрессоренной части. Дополнительно, исполнительный механизм 50 сконфигурирован так, чтобы формировать усилие исполнительного механизма, т.е. усилие в отношении относительного перемещения блока 86 со стороны подрессоренной части и блока 88 со стороны неподрессоренной части посредством силы вращения электродвигателя 76, которая прикладывается к штоку 72 с резьбой. Усилие исполнительного механизма действует на подрессоренную часть и неподрессоренную часть через винтовую пружину 48 сжатия.
iii) Структура гидравлического амортизатора
Амортизатор 52 каждого устройства 20 подвески составлен как цилиндрическое устройство и размещается между исполнительным механизмом 50 и вторым нижним рычагом 36. Амортизатор 52 включает в себя, как правило, цилиндрический корпус 90, который соединяется со вторым нижним рычагом 36 в месте 92 соединения, неподвижно предусмотренном на его нижнем конце. Корпус 90 содержит рабочую текучую среду внутри себя. Поршень 94 размещается внутри корпуса 90 так, что внутренность корпуса 90 делится на две камеры для текучей среды, а именно верхнюю камеру 96 для текучей среды и нижнюю камеру 98 для текучей среды. Поршень 94 имеет возможность скользить относительно корпуса 90.
Амортизатор 52 имеет шток 100 поршня, соединенный на своем нижнем конце с поршнем 94 и проходящий через часть крышки корпуса 90. Шток 100 поршня проходит через отверстие, сформированное в днище внешней трубы 60 и также проходит через шток 72 с резьбой и вал 80 электродвигателя так, чтобы прикрепляться на своем верхнем конце к корпусу 78 электродвигателя.
Амортизатор 52 имеет структуру, аналогичную структуре противоударного демпфера двутрубного типа. Структура амортизатора 52 будет пояснена подробно со ссылкой на фиг. 4. Как показано на фиг. 4, корпус 90 амортизатора 52 имеет двухтрубную структуру, состоящую из внешнего цилиндрического элемента 102 и внутреннего цилиндрического элемента 104, между которыми сформирована буферная камера 106. Вблизи внутренней нижней части корпуса 90 предусмотрена разделительная перегородка 108, и сформирована вспомогательная камера 112 для текучей среды, сообщающаяся с буферной камерой 106 через перепускные отверстия 110. Другими словами, нижняя камера 98 для текучей среды и буферная камера 106 поддерживают сообщение друг с другом через вспомогательную камеру 112 для текучей среды.
Поршень 94 имеет множество перепускных каналов 114, 116 (два из которых показаны на фиг. 4), которые сформированы в направлении толщины поршня 62 с тем, чтобы протягиваться в направлении оси, и через которые верхняя камера 96 для текучей среды и нижняя камера 98 для текучей среды сообщаются друг с другом. Дисковидные клапанные элементы 118, 120, каждый из которых сформирован из упругого материала, располагаются соответственно на нижней поверхности и верхней поверхности поршня 94. Отверстия перепускных каналов 114 со стороны нижней камеры 98 для текучей среды закрываются клапанным элементом 118, при этом отверстия перепускных каналов 116 со стороны верхней камеры 96 для текучей среды закрываются клапанным элементом 120.
Аналогично поршню 94, разделительная перегородка 108 имеет множество перепускных каналов 122, 124 (два из которых показаны на фиг. 4), которые сформированы в направлении толщины разделительной перегородки 108, и через которые нижняя камера 98 для текучей среды и вспомогательная камера 112 сообщаются друг с другом. Дисковидные клапанные элементы 126, 128, каждый из которых сформирован из упругого материала, располагаются соответственно на нижней поверхности и верхней поверхности разделительной перегородки 108. Отверстия перепускных каналов 122 со стороны вспомогательной камеры 112 для текучей среды закрываются клапанным элементом 126, при этом отверстия перепускных каналов 124 со стороны нижней камеры 98 для текучей среды закрываются клапанным элементом 128.
В структуре, описанной выше, когда поршень 94 движется вверх в корпусе 90, часть рабочей текучей среды в верхней камере 96 для текучей среды течет в нижнюю камеру 98 для текучей среды через перепускные каналы 114, при этом часть рабочей текучей среды в буферной камере 106 течет в нижнюю камеру 98 для текучей среды через перепускные каналы 124. В данной ситуации сопротивление оказывается перемещению поршня 94 вверх вследствие протекания рабочей текучей среды в нижнюю камеру 98 для текучей среды в результате отклонения клапанных элементов 118, 128, вызываемого рабочей текучей средой. С другой стороны, когда поршень 94 движется вниз в корпусе 90, часть рабочей текучей среды в нижней камере 98 для текучей среды течет в верхнюю камеру 96 для текучей среды через перепускные каналы 116, в то же время протекая в буферную камеру 106 через перепускные каналы 122. В данной ситуации сопротивление оказывается перемещению поршня 94 вниз вследствие протекания рабочей текучей среды из нижней камеры 98 для текучей среды в результате отклонения клапанных элементов 120, 126, вызываемого рабочей текучей средой.
Согласно структуре, описанной выше, амортизатор 52 сконфигурирован так, чтобы допускать сообщение по текучей среде между верхней камерой 96 для текучей среды и нижней камерой 98 для текучей среды и между нижней камерой 98 для текучей среды и буферной камерой 106 в связи с перемещением поршня 94 вверх и вниз относительно корпуса 90, и сконфигурирован так, чтобы включать в себя механизм оказания гидравлического сопротивления для оказания сопротивления движению текучей среды. То есть амортизатор 52 сконфигурирован так, чтобы формировать силу сопротивления против относительного перемещения подрессоренной части и неподрессоренной части, а именно демпфирующую силу в отношении относительного перемещения.
iv) Структуры пружины подвески и соединяющего механизма
Нижнее седло 140 пружины, имеющее фланцеобразную форму, прикрепляется к внешней круговой части корпуса 90, в то время как промежуточное седло 142 пружины, имеющее фланцеобразную форму, прикрепляется к внешней круговой части внешней трубы 60. Винтовая пружина 48 сжатия размещается в сжатом состоянии с тем, чтобы быть вставленной между нижним седлом 140 пружины и промежуточным седлом 142 пружины. Дополнительно, верхнее седло 146 пружины прикрепляется к нижней стороне установочной части 54 через резиновую деталь 144 для амортизации колебаний. Винтовая пружина 46 сжатия размещается в сжатом состоянии с тем, чтобы быть вставленной между промежуточным седлом 142 пружины и верхним седлом 146 пружины.
Согласно структуре, описанной выше, винтовая пружина 46 сжатия функционирует как соединяющая пружина для упругого соединения подрессоренной части и блока 88 со стороны неподрессоренной части, в то же время винтовая пружина 48 сжатия функционирует как опорная пружина, которая предоставляет возможность блоку 88 со стороны неподрессоренной части упруго поддерживаться неподрессоренной частью. Соответственно, винтовая пружина 46 сжатия и винтовая пружина 48 сжатия работают совместно друг с другом, чтобы функционировать в качестве пружины подвески для упругого соединения подрессоренной части и неподрессоренной части. Дополнительно, винтовая пружина 48 сжатия является одним составляющим элементом соединяющего механизма 64 для упругого соединения неподрессоренной части и блока 88 со стороны неподрессоренной части.
Другими словами, в настоящем устройстве 20 подвески блок 86 со стороны подрессоренной части исполнительного механизма 50 в качестве неподвижного блока неподвижно соединен с подрессоренной частью в качестве части поддержки неподвижного блока, в то время как блок 88 со стороны неподрессоренной части исполнительного механизма 50 в качестве плавающего блока плавающим образом поддерживается неподрессоренной частью в качестве части поддержки плавающего блока. В этом отношении в настоящем устройстве 20 подвески блок 88 со стороны неподрессоренной части также плавающим образом поддерживается подрессоренной частью через винтовую пружину 46 сжатия.
Соединяющий механизм 64 сконфигурирован так, чтобы обеспечивать возможность перемещения блока 88 со стороны неподрессоренной части относительно неподрессоренной части. Отметим, что относительное смещение блока 88 со стороны неподрессоренной части и неподрессоренной части при их относительном перемещении ограничивается механизмом 150 ограничения относительного смещения соединяющего механизма 64. Механизм 150 ограничения относительного смещения состоит из нижней части внешней трубы 60, верхней крайней части корпуса 90 амортизатора 52, цилиндрической юбки 152, прикрепленной к нижней части внешней трубы 60, стопорного кольца 154, прикрепленного к внешней круговой части корпуса 90 и т.д.
Более конкретно, когда блок 88 со стороны неподрессоренной части перемещается по направлению к неподрессоренной части, нижняя часть внешней трубы 60 приходит в соприкосновение с верхней крайней частью корпуса 90 амортизатора 52 через резиновую подушку 156, посредством чего перемещение блока 88 со стороны неподрессоренной части по направлению к неподрессоренной части ограничивается. С другой стороны, когда блок 88 со стороны неподрессоренной части перемещается от неподрессоренной части, нижняя крайняя часть юбки 152, имеющая форму внутреннего фланца, приходит в соприкосновение со стопорным кольцом 154 через резиновую подушку 158, посредством чего перемещение блока 88 со стороны неподрессоренной части от неподрессоренной части ограничивается.
Диапазон относительного перемещения, ограниченный механизмом 150 ограничения относительного смещения, а именно диапазон, в котором разрешено перемещение блока 88 со стороны неподрессоренной части относительно неподрессоренной части (далее в данном документе называемый "допустимым диапазоном относительного перемещения", где уместно), указывается как ∆W на фиг. 3. Тем временем перемещение подрессоренной части и неподрессоренной части по направлению друг к другу и перемещение подрессоренной части и неподрессоренной части друг от друга (далее в данном документе в совокупности называемое "ходом", где уместно) ограничиваются посредством ограничения диапазона поворота второго нижнего рычага 36 посредством стопора прямого хода и стопора обратного хода, которые не показаны. Соответственно, вышеуказанный допустимый диапазон относительного перемещения сделан меньшим, чем диапазон хода, в котором допустим ход.
v) Структура системы управления
Как показано на фиг. 1, система подвески согласно настоящему варианту осуществления имеет электронный блок 170 управления (далее в данном документе обозначенный аббревиатурой "ЭБУ 170", где уместно), в качестве контроллера для управления работой каждого из четырех исполнительных механизмов 50, а именно для управления приводным усилием каждого исполнительного механизма 50. ЭБУ 170 состоит, главным образом, из компьютера, оснащенного ЦП, ПЗУ, ОЗУ и т.д. С ЭБУ 170 соединяются четыре инвертера 172, каждый в качестве схемы возбуждения электродвигателя 76 соответствующего одного из исполнительных механизмов 50. Каждый инвертер 172 соединяется с аккумулятором 176 в качестве источника электроэнергии через преобразователь 174 и соединяется с электродвигателем 76 соответствующего исполнительного механизма 50. Каждый электродвигатель 76 является бесщеточным электродвигателем постоянного тока и сконфигурирован так, чтобы приводиться в действие при постоянном напряжении. Управление приводным усилием каждого исполнительного механизма 50 выполняется посредством управления электрическим током, текущим через электродвигатель 76. Электрический ток, текущий через электродвигатель 76, управляется изменением отношения (скважности) времени включения импульса к времени выключения импульса посредством широтно-импульсной модуляции (PWM). Угол и поворота каждого электродвигателя 76 обнаруживается соответствующим датчиком 178 угла поворота электродвигателя, а инвертер 172 сконфигурирован, чтобы управлять работой соответствующего электродвигателя 76 на основе обнаруженного угла поворота электродвигателя.
Вышеуказанные четыре датчика 178 углов поворота электродвигателей соединяются с ЭБУ 170. C ЭБУ 170 дополнительно соединяются датчик 180 рулевого управления для обнаружения рабочего угла δ рулевого колеса в качестве величины поворота руля; датчик 182 поперечного ускорения для обнаружения фактического поперечного ускорения GYR, которое фактически формируется в кузове транспортного средства; и датчик 184 продольного ускорения для обнаружения продольного ускорения GX, которое формируется в кузове транспортного средства. С ЭБУ 170 дополнительно соединяются различные датчики, предусмотренные для того, чтобы соответствовать соответствующим четырем устройствам 20 подвески, такие как датчики 186 вертикального ускорения подрессоренной части, каждый из которых необходим для обнаружения ускорения GU подрессоренной части, т.е. вертикального ускорения подрессоренной части, датчики 188 вертикального ускорения неподрессоренной части, каждый из которых необходим для обнаружения ускорения GL неподрессоренной части, т.е. вертикального ускорения неподрессоренной части, и датчики 190 хода, каждый из которых необходим для обнаружения величины S хода, которая соответствует расстоянию между подрессоренной частью и неподрессоренной частью (далее в данном документе называемому "расстоянием между подрессоренной и неподрессоренной частью", где уместно).
С ЭБУ 170 дополнительно соединяется электронный блок 192 управления тормозом (далее в данном документе называемый "ЭБУ 192 тормоза", где уместно), в качестве устройства управления для тормозной системы. С ЭБУ 192 тормоза соединяются четыре датчика 194 скорости колес, которые предусмотрены для того, чтобы соответствовать соответствующим четырем колесам для обнаружения соответствующих скоростей вращения соответствующих колес. ЭБУ 192 тормоза имеет функцию оценки скорости v движения транспортного средства (далее в данном документе называемой "скоростью v движения", где уместно) на основе значений, обнаруженных соответствующими датчиками 194 скорости колес. ЭБУ 170 сконфигурирован так, чтобы получать скорость транспортного средства от ЭБУ 192 тормоза, когда необходимо.
В системе управления системы подвески согласно настоящему варианту осуществления ЭБУ 170 выполняет управление работой электродвигателя 76 каждого исполнительного механизма 50 на основе сигналов, отправляемых от различных датчиков, указанных выше. Система управления снабжена переключателем 196 изменения управления, который должен задействоваться водителем транспортного средства для выбора требуемого одного из двух режимов управления, задаваемых в управлении амортизацией относительных колебаний, которые будут пояснены. Переключатель 196 изменения управления также соединен с ЭБУ 170. В ПЗУ компьютера ЭБУ 170 хранятся программы, относящиеся к управлению исполнительного механизмами 50, которые будут пояснены, различные данные и т.д.
(B) Управление электромагнитным исполнительным механизмом
В системе подвески согласно настоящему варианту осуществления следующие три вида управления выполняются посредством управления каждым исполнительным механизмом 50. Более конкретно, выполняются управление амортизацией колебаний подрессоренной части для амортизации колебаний подрессоренной части; управление ограничением изменения положения кузова для ограничения наклона относительно поперечной и относительно продольной оси кузова транспортного средства; и управление амортизацией относительных колебаний для амортизации колебаний блока 88 со стороны неподрессоренной части, вызванных винтовыми пружинами 46, 48 сжатия, а именно, для амортизации колебаний блока 88 со стороны неподрессоренной части относительно неподрессоренной части (далее в данном документе называемых "относительными колебаниями блока 88 со стороны неподрессоренной части", где уместно).
i) Управление амортизацией колебаний подрессоренной части
Модель колебаний на основе конструкции реального устройства (далее в данном документе называемой "моделью реального устройства", где уместно) устройства 20 подвески показана на фиг. 5(a).
Модель колебаний включает в себя массу MU подрессоренной части, которая является инерциальной массой подрессоренной части, массу ML неподрессоренной части, которая является инерциальной массой неподрессоренной части, и промежуточную массу MI, которая является инерциальной массой относительно работы блока 88 со стороны неподрессоренной части исполнительного механизма 50, как объяснено ниже. В этой модели между массой MU подрессоренной части и массой ML неподрессоренной части размещается амортизатор, соответствующий амортизатору 52, а именно амортизатор C1, имеющий коэффициент C1 демпфирования. Дополнительно, между массой MU подрессоренной части и промежуточной массой MI размещается пружина, соответствующая винтовой пружине 46 сжатия, а именно пружина K1, имеющая жесткость K1 пружины, и исполнительный механизм A, соответствующий исполнительному механизму 50, так, чтобы быть параллельными друг другу. Кроме того, между промежуточной массой MI и массой MU подрессоренной части размещается пружина, соответствующая винтовой пружине 48 сжатия, а именно пружина K2, имеющая жесткость K2 пружины. Кроме того, между массой ML неподрессоренной части и поверхностью дороги размещается пружина, соответствующая шине, а именно пружина K3, имеющая жесткость K3 пружины. Модель управления в качестве теоретической модели для управления исполнительным механизмом 50 указана на фиг. 5(b) и 5(c). В каждой из этих моделей масса MU подрессоренной части подвешена за счет амортизатора CS, имеющего коэффициент CS демпфирования. То есть такие модели управления основываются на теории работы амортизатора типа «skyhook». Разница между первой моделью управления, показанной на фиг. 5(b), и второй моделью управления, показанной на фиг. 5(c), будет пояснена позже.
Управление амортизацией колебаний подрессоренной части выполняется на исполнительных механизмах 50 соответствующих четырех устройств 20 подвески независимо друг от друга. При управлении амортизацией колебаний подрессоренной части исполнительный механизм 50 управляется согласно вышеуказанным двум моделям управления, в каждой из которых размещается амортизатор CS, так что усилие исполнительного механизма, которое должно быть сформировано исполнительным механизмом A в модели реального устройства, становится равным усилию, соответствующему демпфирующему усилию, которое должно быть сформировано амортизатором CS в моделях управления. Более конкретно, скорость VU подрессоренной части, т.е. скорость перемещения (абсолютная скорость) подрессоренной части первоначально вычисляется на основе вертикального ускорения GU подрессоренной части (далее в данном документе называемого "ускорением GU подрессоренной части", где уместно), обнаруженного датчиком 186 вертикального ускорения подрессоренной части, и работа электродвигателя 76 управляется так, чтобы формировать, в качестве составляющей FU амортизации колебаний подрессоренной части, усилие исполнительного механизма согласно следующей формуле, т.е. усилие исполнительного механизма, имеющее величину в соответствии со скоростью VU подрессоренной части
FU=CS•VU
Коэффициент CS демпфирования может рассматриваться как коэффициент усиления системы управления и устанавливается в значение, подходящее для эффективной амортизации колебаний на резонансной частоте и около резонансной частоты подрессоренной части. В системе подвески согласно настоящему варианту осуществления амортизатор 52 имеет дело с явлением резонанса неподрессоренной части. Другими словами, коэффициент C1 демпфирования амортизатора C1 в вышеуказанной модели реального устройства и моделях управления, а именно коэффициент демпфирования амортизатора 52, устанавливается в значение, подходящее для эффективной амортизации колебаний на резонансной частоте и около резонансной частоты неподрессоренной части.
ii) Управление ограничением изменения положения кузова
В системе подвески согласно настоящему варианту осуществления управление ограничением изменения положения кузова выполняется, в дополнение к вышеуказанному управлению амортизацией колебаний подрессоренной части, в попытке уменьшить наклон относительно продольной оси кузова транспортного средства, формируемый при повороте транспортного средства, и наклон относительно поперечной оси кузова транспортного средства, формируемый при ускорении и торможении транспортного средства. При управлении ограничением изменения положения кузова исполнительным механизмом 50 формируется противодействующая сила против поперечного момента в качестве действующей силы, которая действует на кузов транспортного средства как причина наклона относительно продольной оси кузова транспортного средства, и противодействующая сила против продольного момента в качестве действующей силы, которая действует на кузов транспортного средства как причина наклона относительно поперечной оси кузова транспортного средства.
Пояснение будет дано относительно наклона относительно продольной оси кузова транспортного средства. Каждый из двух исполнительных механизмов 50 соответствующих двух устройств 20 подвески, расположенных на внутренней стороне относительно поворота, управляется, чтобы формировать усилие исполнительного механизма в направлении, в котором подрессоренная часть и неподрессоренная часть перемещаются по направлению друг к другу (далее в данном документе называемом "направлением прямого хода", где уместно), в то время как каждый из двух исполнительных механизмов 50 соответствующих двух устройств 20 подвески, расположенных с внешней стороны относительно поворота, управляется, чтобы формировать усилие исполнительного механизма в направлении, в котором подрессоренная часть и неподрессоренная часть перемещаются друг от друга (далее в данном документе называемом "направлением обратного хода", где уместно), в соответствии с поперечным моментом, указанным выше. Каждое усилие исполнительного механизма формируется как составляющая FR ограничения наклона относительно продольной оси как один вид составляющей ограничения изменения положения кузова.
Более конкретно, поперечное ускорение GY, которое должно использоваться в управлении, определяется согласно следующей формуле на основе: (1) оцененного поперечного ускорения GYC, которое оценивается на основе угла поворота рулевого колеса, обнаруженного датчиком 180 рулевого управления, и скорости v транспортного средства, полученной ЭБУ 192 тормоза; и (2) фактического поперечного ускорения GYR, которое обнаруживается датчиком 182 поперечного ускорения
GY=αc•GYC+αR• GYR (αc, αR: коэффициенты усиления)
Определенное таким образом поперечное ускорение GY является величиной показателя поперечного момента, указывающей поперечный момент, который действует на кузов транспортного средства. Составляющая FR ограничения наклона относительно продольной оси определяется на основе поперечного ускорения GY согласно следующей формуле:
FR=β•GY (β: коэффициент усиления системы управления)
Пояснение будет приведено в отношении наклона относительно поперечной оси кузова транспортного средства. При внезапном "клевке" передней части кузова транспортного средства, формируемого при торможении кузова транспортного средства, каждый из двух исполнительных механизмов 50 соответствующих двух устройств 20 подвески, расположенных со стороны передних колес транспортного средства, управляется, чтобы формировать усилие исполнительного механизма в направлении обратного хода, в то время как каждый из двух исполнительных механизмов 50 соответствующих двух устройств 20 подвески, расположенных со стороны задних колес, управляется, чтобы формировать усилие исполнительного механизма в направлении прямого хода, в соответствии с продольным моментом. Каждое усилие исполнительного механизма формируется как составляющая FP ограничения наклона относительно поперечной оси как один вид составляющей ограничения изменения положения кузова. Для приседания кузова транспортного средства, формируемого при ускорении кузова транспортного средства, каждый из двух исполнительных механизмов 50 соответствующих двух устройств 20 подвески, расположенных со стороны задних колес транспортного средства, управляется, чтобы формировать усилие исполнительного механизма в направлении обратного хода, в то время как каждый из двух исполнительных механизмов 50 соответствующих двух устройств 20 подвески, расположенных со стороны передних колес транспортного средства, управляется, чтобы формировать усилие исполнительного механизма в направлении прямого хода, в соответствии с продольным моментом. Каждое усилие исполнительного механизма формируется как составляющая FP ограничения наклона относительно поперечной оси как один вид составляющей ограничения изменения положения кузова.
Более конкретно, продольное ускорение GX, обнаруженное датчиком 182 продольного ускорения, применяется в качестве величины показателя продольного момента, указывающей продольный момент, и составляющая FP ограничения наклона относительно поперечной оси определяется на основе фактического продольного ускорения GX согласно следующей формуле:
FP=γ•GX (γ: коэффициент усиления системы управления)
iii) Управление амортизацией относительных колебаний
a) Значение
Блок 88 со стороны неподрессоренной части исполнительного механизма 50 плавающим образом поддерживается неподрессоренной частью. Соответственно, блок 88 со стороны неподрессоренной части как плавающий блок колеблется относительно неподрессоренной части в качестве части поддержки плавающего блока. Когда колебания блока 88 со стороны неподрессоренной части относительно неподрессоренной части, а именно относительные колебания блока 88 со стороны неподрессоренной части, передаются подрессоренной части, водитель транспортного средства ощущает колебания. Соответственно, такие колебания вызывают ухудшение комфорта во время движения транспортного средства. Дополнительно, колебания становятся колебаниями неподрессоренной части, вызывая неустойчивость нагрузки, которую колесо оказывает на землю. В этом случае устойчивость при рулении транспортным средством ухудшается. Поскольку блок 88 со стороны неподрессоренной части имеет промежуточную массу MI, присущую ей, как показано в модели колебаний на фиг. 5, явление резонанса происходит относительно колебаний характерной частоты. Когда явление резонанса происходит при относительных колебаниях блока 88 со стороны неподрессоренной части, ухудшение комфорта во время движения и ухудшение устойчивости рулевого управления становятся заметными.
В связи с перемещением блока 88 со стороны неподрессоренной части относительно блока 86 со стороны подрессоренной части шток 72 с резьбой и электродвигатель 76 вращаются. Соответственно, имея дело с колебаниями блока 88 со стороны неподрессоренной части, действие инерционного момента тела вращения в случае, когда шток 72 с резьбой и роторная часть электродвигателя 76 рассматриваются как одно тело вращения, не должно исключаться. То есть желательно рассматривать, как часть инерциальной массы блока 88 со стороны неподрессоренной части, преобразованную массу, полученную преобразованием инерционного момента тела вращения в инерциальную массу при перемещении вверх и вниз блока 88 со стороны неподрессоренной части. Соответственно, в модели колебаний, показанной на фиг. 5, промежуточная масса MI трактуется как включающая в себя преобразованную массу.
b) Два управления амортизацией относительных колебаний
В системе подвески согласно настоящему варианту осуществления управление амортизацией относительных колебаний выполняется, чтобы иметь дело с вышеуказанными относительными колебаниями блока 88 со стороны неподрессоренной части. Аналогично управлению амортизацией колебаний подрессоренной части, управление амортизацией относительных колебаний выполняется на исполнительных механизмах 50 соответствующих четырех устройств 20 подвески независимо друг от друга. В настоящей системе подвески два взаимно разных управления устанавливаются в качестве управления амортизацией относительных колебаний, и одно из двух управлений выборочно выполняется.
Первое управление амортизацией относительных колебаний как одно из двух управлений зависит от первой модели управления, показанной на фиг. 5(b). В модели управления между промежуточной массой MI и массой ML неподрессоренной части размещается демпфирующий относительные колебания амортизатор CR1, имеющий коэффициент CR1 демпфирования, в качестве амортизатора для демпфирования относительных колебаний блока 88 со стороны неподрессоренной части. В первом управлении амортизацией относительных колебаний исполнительный механизм 50 управляется так, что усилие исполнительного механизма, которое должно быть сформировано исполнительным механизмом A в модели реального устройства, показанной на фиг. 5(a), становится равным усилию, которое соответствует демпфирующему усилию, которое должно быть сформировано амортизатором CR1. Более конкретно, на основе скорости VIL относительного перемещения блока 88 со стороны неподрессоренной части и неподрессоренной части, работа электродвигателя 76 управляется так, чтобы формировать, в качестве составляющей FI амортизации относительных колебаний, усилие исполнительного механизма согласно следующей формуле, т.е. усилие исполнительного механизма, имеющее величину в соответствии со скоростью VIL относительного перемещения
FI=CR1•VIL
Более конкретно, длина L исполнительного механизма первоначально вычисляется в качестве позиции при относительном перемещении блока 86 со стороны подрессоренной части и блока 88 со стороны неподрессоренной части на основе угла поворота электродвигателя, обнаруженного датчиком 178 угла поворота электродвигателя. На основе разности между вычисленной длиной L исполнительного механизма и величиной S хода, обнаруженной датчиком 190 хода, вычисляется расстояние (L-S) между исполнительным механизмом и неподрессоренной частью (далее в данном документе называемое "расстоянием между исполнительным механизмом и неподрессоренной частью", где уместно). Впоследствии, скорость VIL относительного перемещения блока 88 со стороны неподрессоренной части и неподрессоренной части вычисляется на основе быстроты изменения в расстоянии (L-S). На основе вычисленной скорости VIL относительного перемещения определяется составляющая FI амортизации относительных колебаний.
Второе управление амортизацией колебаний как другое из двух управлений, указанных выше, зависит от второй модели управления, показанной на фиг. 5(c). В модели управления между промежуточной массой MI и массой MU подрессоренной части размещается демпфирующий относительные колебания амортизатор CR2, имеющий коэффициент CR2 демпфирования, в качестве амортизатора для демпфирования относительных колебаний блока 88 со стороны неподрессоренной части. Во втором управлении амортизацией относительных колебаний исполнительный механизм 50 управляется так, что усилие исполнительного механизма, которое должно быть сформировано исполнительным механизмом A в модели реального устройства, показанной на фиг. 5(a), становится равным усилию, которое соответствует демпфирующему усилию, которое должно быть сформировано амортизатором CR2. Более конкретно, на основе скорости VIU относительного перемещения блока 88 со стороны неподрессоренной части и блока 86 со стороны подрессоренной части работа электродвигателя 76 управляется так, чтобы формировать, в качестве составляющей FI амортизации относительных колебаний, усилие исполнительного механизма согласно следующей формуле, т.е. усилие исполнительного механизма, имеющее величину в соответствии со скоростью VIU относительного перемещения
FI=CR2•VIU
Более конкретно, длина L исполнительного механизма первоначально вычисляется на основе угла и поворота электродвигателя, обнаруженного датчиком 178 угла поворота электродвигателя. На основе быстроты изменения в вычисленной длине L исполнительного механизма вычисляется скорость VIU относительного перемещения блока 88 со стороны неподрессоренной части и блока 86 со стороны подрессоренной части, и составляющая FI амортизации относительных колебаний определяется на основе вычисленной скорости VIU относительного перемещения.
Первое и второе управления амортизацией относительных колебаний выборочно выполняются путем задействования переключателя 196 изменения управления водителем. Относительные колебания блока 88 со стороны неподрессоренной части могут быть эффективно ограничены любым из двух управлений. Отметим, что каждый из коэффициентов CR1, CR2 демпфирования соответствующих демпфирующих относительные колебания амортизаторов CR1, CR2 в вышеуказанных моделях управления устанавливается в значение, подходящее для эффективной амортизации относительных колебаний блока 88 со стороны неподрессоренной части, частота которого равна или находится около резонансной частоты. Далее в данном документе демпфирующие относительные колебания амортизаторы CR1, CR2 и коэффициенты CR1, CR2 демпфирования в совокупности называются "демпфирующим относительные колебания амортизатором CR" и "коэффициентом CR демпфирования", соответственно, где уместно.
c) Результат управления амортизаций относительных колебаний
Фиг. 6 является графиком, на котором указывается интенсивность, с которой колебания, которые передаются с поверхности дороги на неподрессоренную часть, передаются подрессоренной части. То есть график показывает характеристику передачи колебаний относительно частоты колебаний. На графике вертикальная ось указывает интенсивность колебаний, а горизонтальная ось указывает частоту колебаний. Пунктирная линия на графике указывает характеристику, когда вышеуказанное управление амортизацией относительных колебаний не выполняется, в то время как сплошная линия на графике указывает характеристику, когда вышеуказанное управление амортизацией относительных колебаний выполняется.
Как видно из графика, в случае, когда управление амортизацией относительных колебаний не выполняется, пик интенсивности передачи колебаний присутствует относительно колебаний, имеющих частоту около 6 Гц. То есть происходит явление резонанса на частоте, которая является резонансной частотой. Явление резонанса возникает из структуры, в которой блок 88 со стороны неподрессоренной части упруго поддерживается неподрессоренной частью. Наоборот, в случае, когда управление амортизацией относительных колебаний выполняется, вышеуказанный пик не существует, и явление резонанса блока 88 со стороны неподрессоренной части эффективно ограничивается или подавляется. Соответственно, транспортное средство, на котором настоящая система подвески установлена, обладает улучшенным комфортом во время движения и устойчивостью при рулении благодаря управлению амортизацией относительных колебаний, указанному выше.
d) Условия для выполнения управления амортизацией относительных колебаний.
Управление амортизацией относительных колебаний выполняется только в ситуации, в которой конкретная частотная составляющая интенсивности относительных колебаний блока 88 со стороны неподрессоренной части выше, чем пороговое значение. Как показано на фиг. 7, диапазон ∆fR резонансных частот устанавливается так, чтобы включать в себя резонансную частоту fR и полосу частот вокруг резонансной частоты fR (т.е. полосу в пределах ±3 Гц от резонансной частоты в настоящей системе подвески), и составляющая IR интенсивности колебаний в диапазоне резонансных частот, т.е. интенсивность относительных колебаний блока 88 со стороны неподрессоренной части в диапазоне ∆fR резонансных частот, наблюдается. (Далее в данном документе составляющая IR интенсивности колебаний в диапазоне резонансных частот называется "составляющей IR интенсивности колебаний в диапазоне резонансных частот", где уместно). В случае, когда составляющая IR превышает пороговое значение IO, выполняется управление амортизацией относительных колебаний. Поскольку управление амортизацией относительных колебаний в настоящей системе подвески нацелено, главным образом, на пресечение явления резонанса блока со стороны неподрессоренной части, управление амортизацией относительных колебаний приспособлено выполняться на основе составляющей интенсивности относительных колебаний в диапазоне резонансных частот.
Более конкретно, в первом управлении амортизацией относительных колебаний относительные колебания блока 88 со стороны неподрессоренной части и неподрессоренной части являются непосредственной целью оценки, а составляющая относительных колебаний блока 88 со стороны неподрессоренной части в диапазоне ∆fR резонансных частот идентифицируется выполнением процесса фильтрации по скорости VIL относительного перемещения блока со стороны неподрессоренной части и неподрессоренной части. На основе значения амплитуды идентифицированной составляющей идентифицируется составляющая IR интенсивности колебаний в диапазоне резонансных частот. Во втором управлении амортизацией относительных колебаний, с другой стороны, относительные колебания блока 88 со стороны неподрессоренной части и блока 86 со стороны подрессоренной части являются непосредственной целью оценки, и составляющая относительных колебаний блока 88 со стороны неподрессоренной части в диапазоне ∆fR резонансных частот идентифицируется выполнением процесса фильтрации по скорости VIU относительного перемещения блока 88 со стороны неподрессоренной части и блока 86 со стороны подрессоренной части. На основе значения амплитуды идентифицированной составляющей идентифицируется составляющая IR интенсивности колебаний в диапазоне резонансных частот.
e) Корректировка составляющей амортизации относительных колебаний
Как объяснено выше, перемещение блока 88 со стороны неподрессоренной части относительно неподрессоренной части допускается соединяющим механизмом 64. Однако относительное перемещение ограничивается механизмом 150 ограничения относительного смещения с тем, чтобы сохраняться в допустимом диапазоне ∆W относительного перемещения. Соответственно, когда блок 88 со стороны неподрессоренной части перемещается по направлению к неподрессоренной части в случае, когда относительные колебания блока 88 со стороны неподрессоренной части являются интенсивными, существует высокая вероятность того, что нижняя часть внешней трубы 60 приходит в соприкосновение с верхней крайней частью корпуса 90 амортизатора 52. С другой стороны, когда блок 88 со стороны неподрессоренной части перемещается от неподрессоренной части, существует высокая вероятность того, что внутренняя фланцевидная нижняя крайняя часть юбки 152, прикрепленной к внешней трубе 60, приходит в соприкосновение со стопорным кольцом 154, прикрепленным к корпусу 90. В некоторых случаях такие соприкосновения сопровождаются ударом. Когда водитель ощущает удар как колебания или воспринимает удар как звук удара, комфорт во время вождения ухудшается. Соответственно, в настоящей системе подвески составляющая FI амортизации относительных колебаний корректируется, чтобы предотвращать или смягчать удар.
Фиг. 3 показывает состояние, в котором блок 88 со стороны неподрессоренной части помещается в нейтральное положение относительно неподрессоренной части. Нейтральное положение устанавливается в качестве положения, в котором транспортное средство удерживается неподвижно на плоской и горизонтальной поверхности дороги. Допустимый диапазон ∆W относительного перемещения устанавливается так, что допустимая величина смещения в направлении, в котором блок 88 со стороны неподрессоренной части перемещается от неподрессоренной части, и допустимая величина смещения в направлении, в котором блок 88 со стороны неподрессоренной части перемещается по направлению к неподрессоренной части, задаются равными друг другу с нейтральным положением в центре. Другими словами, эти допустимые величины смещения задаются равными ∆W/2.
Составляющая FI амортизации относительных колебаний корректируется так, чтобы увеличиваться, в случае, когда величина W относительного смещения от нейтрального положения блока 88 со стороны неподрессоренной части превышает пороговое значение WO, которое установлено в значение, меньшее, чем допустимая величина ∆W/2 смещения. То есть, когда блок 88 со стороны неподрессоренной части перемещается близко к каждому краю допустимого диапазона ∆W относительного перемещения до определенной степени, составляющая FI амортизации относительных колебаний увеличивается так, чтобы оказывать большое сопротивление дополнительному перемещению к краю. В частности, составляющая FIA амортизации относительных колебаний после корректировки (далее в данном документе называемая "скорректированной составляющей FIA амортизации относительных колебаний", где уместно) определяется согласно следующей формуле:
FIA=ε•FI (ε: поправочный коэффициент)
В этом отношении величина W относительного смещения блока 88 со стороны неподрессоренной части вычисляется на основе вышеуказанного расстояния (L-S) между исполнительным механизмом и неподрессоренной частью.
Поправочный коэффициент ε устанавливается, как указано на фиг. 8, и сохраняется в ПЗУ ЭБУ 170 в качестве карты регулировок. При определении составляющей FIA амортизации относительных колебаний после корректировки выполняется обращение к карте регулировок, посредством чего поправочный коэффициент ε получается в качестве значения в соответствии с величиной W относительного смещения блока 88 со стороны неподрессоренной части. Как видно из фиг. 8, поправочный коэффициент ε устанавливается в "1" прежде, чем величина W относительного смещения блока 88 со стороны неподрессоренной части превышает пороговое значение WO. Поправочный коэффициент ε приспособлен увеличиваться с увеличением величины W относительного смещения, когда величина W превышает пороговое значение WO.
iv) Синхронизация управлений
Вышеуказанное управление амортизацией колебаний подрессоренной части, управление ограничением изменения положения кузова и управление амортизацией относительных колебаний выполняются комплексно, и составляющая FU амортизации колебаний подрессоренной части в управлении амортизацией колебаний подрессоренной части, составляющая FR ограничений наклона относительно продольной оси и составляющая FP ограничений наклона относительно поперечной оси в управлении ограничением изменения положения кузова, и составляющая FI амортизации относительных колебаний (в частности, скорректированная составляющая FIA амортизации относительных колебаний) в управлении амортизацией относительных колебаний рассматриваются объединенным образом. Более конкретно, эти составляющие FU, FR, FP, FIA суммируются согласно следующей формуле, таким образом, комплексное усилие F исполнительного механизма, которое должно быть сформировано исполнительным механизмом 50, определяется как:
F=FU+FR+FP+FIA
В случае, когда управление амортизацией относительных колебаний не выполняется, составляющая FI становится равной "0", таким образом, составляющая FIA амортизации относительных колебаний после корректировки также становится равной "0".
Усилие исполнительного механизма, в котором составляющие FU, FR, FP, FIA объединены, является усилием исполнительного механизма, которое должно формироваться каждым из исполнительных механизмов 50 соответствующих четырех устройств 20 подвески. Работа электродвигателя 76 каждого исполнительного механизма 50 управляется так, чтобы формировать усилие исполнительного механизма. Более конкретно, скважность D импульсов для электродвигателя 76 каждого исполнительного механизма определяется на основе усилия F исполнительного механизма, которое должно формироваться каждым исполнительным механизмом 50, и команда относительно определенной скважности D отправляется соответствующему инвертеру 172. Каждый инвертер 172 выполняет управление работой электродвигателя 76 соответствующего исполнительного механизма 50.
v) Программа управления
Управление каждым исполнительным механизмом 50 выполняется так, что программа управления исполнительным механизмом, указанная блок-схемой последовательности операций на фиг. 9, осуществляется посредством ЭБУ 170. Программа циклически осуществляется в коротких интервалах времени (например, от нескольких миллисекунд до нескольких десятков миллисекунд), когда выключатель зажигания транспортного средства переведен во включенное состояние. В то время как обработка согласно программе осуществляется для каждого из четырех исполнительных механизмов 50, обработка осуществляется аналогичным образом для всех четырех исполнительных механизмов 50. Соответственно, следующее пояснение будет приведено в отношении одного исполнительного механизма.
В обработке согласно программе управления исполнительным механизмом этап S1 (слово "этап" опускается, где уместно) первоначально осуществляется, чтобы выполнять подпрограмму определения составляющей амортизации колебаний подрессоренной части, указанную блок-схемой последовательности операций на фиг. 10. Далее, осуществляется этап S2, чтобы выполнять подпрограмму для определения составляющей ограничения изменения положения кузова, указанную блок-схемой последовательности операций на фиг. 11. За S2 следует этап S3, чтобы оценивать, какое из первого управления амортизацией относительных колебаний и второго управления амортизацией относительных колебаний выбирается в качестве управления амортизацией относительных колебаний. Когда выбирается первое управление амортизацией относительных колебаний, поток управления переходит к этапу S4, на котором выполняется подпрограмма для определения первой составляющей амортизации относительных колебаний, указанная блок-схемой на фиг. 12. С другой стороны, когда выбирается второе управление амортизацией относительных колебаний, поток управления переходит к этапу S5, на котором выполняется подпрограмма для определения второй составляющей амортизации относительных колебаний, указанная блок-схемой последовательности операций на фиг. 13.
В вышеуказанных подпрограммах соответственно определяются составляющая FU амортизации колебаний подрессоренной части, составляющая FR ограничения наклона относительно продольной оси и составляющая FP ограничения наклона относительно поперечной оси и скорректированная составляющая FIA амортизации относительных колебаний (которая получается посредством корректировки составляющей FI амортизации относительных колебаний), каждая из которых является составляющей усилия исполнительного механизма, согласно методике, поясненной выше.
После того как все составляющие FU, FR, FP, FIA определены, осуществляется этап S6, чтобы суммировать составляющие FU, FR, FP, FIA, так что определяется комплексное усилие F исполнительного механизма. Потом, на этапе S7, команда относительно скважности D отправляется инвертеру 172 на основе определенного усилия F исполнительного механизма. После того как процесс на этапе S8 завершен, одно выполнение программы управления исполнительным механизмом заканчивается. Процесс на каждом из этапов, которые составляют программу управления исполнительным механизмом, и подпрограммы могут быть легко поняты посредством обращения к вышеприведенному объяснению, и мы обойдемся без подробного их объяснения.
(C) Функциональная структура контроллера
ЭБУ 170 в системе подвески согласно настоящему варианту осуществления функционирует как контроллер для управления усилием исполнительного механизма, которое должно быть сформировано каждым из электромагнитных исполнительных механизмов 50. ЭБУ 170 может рассматриваться как имеющий функциональную структуру, показанную на фиг. 17, с точки зрения его функции.
Как показано на фиг. 14, ЭБУ 170 включает в себя три части 200, 202, 204 определения составляющих для определения соответствующих составляющих усилия исполнительного механизма. Более конкретно, ЭБУ 170 включает в себя часть 200 определения составляющей амортизации колебаний подрессоренной части для определения составляющей FU амортизации колебаний подрессоренной части; часть 202 определения составляющей ограничения изменения положения кузова для определения составляющей FR ограничения наклона относительно продольной оси и составляющей FP ограничения наклона относительно поперечной оси; и часть 204 определения составляющей амортизации относительных колебаний для определения составляющей FI амортизации относительных колебаний (строго говоря, для определения скорректированной составляющей FIA амортизации относительных колебаний).
Более конкретно, часть 200 определения составляющей амортизации колебаний подрессоренной части соответствует части ЭБУ 170, которая выполняет процесс на этапе S1 программы управления исполнительным механизмом, а именно процесс согласно подпрограмме определения составляющей амортизации колебаний подрессоренной части. Часть 202 определения составляющей ограничения изменения положения кузова соответствует части ЭБУ 170, которая выполняет процесс на этапе S2, а именно процесс согласно подпрограмме определения составляющей ограничения изменения положения кузова. Часть 204 определения составляющей амортизации относительных колебаний соответствует части ЭБУ 170, которая выполняет процесс на этапах S3-S5, а именно процесс согласно одной из подпрограммы определения первой составляющей амортизации относительных колебаний и подпрограммы определения второй составляющей амортизации относительных колебаний, которая выбирается действием переключателя 196 изменения управления.
ЭБУ 170 дополнительно включает в себя часть 206 определения усилия исполнительного механизма в качестве части, которая выполняет процесс на этапе S6, а именно в качестве части для определения усилия F исполнительного механизма, которое должно формироваться каждым исполнительным механизмом 50, соединяя составляющие FU, FR, FP, FI, (FIA). Кроме того, ЭБУ 170 включает в себя часть 208 отправки команды скважности в качестве части, которая выполняет процесс на этапе S7, а именно в качестве части для отправки команды относительно скважности D инвертеру 172 соответствующего исполнительного механизма 50 на основе усилия F исполнительного механизма.
Согласно функциональной структуре, описанной выше, ЭБУ 170 может рассматриваться как содержащий следующие три части управления для выполнения соответствующих трех видов управления: часть управления амортизацией колебаний подрессоренной части, которая включает в себя часть 200 определения составляющей амортизации колебаний подрессоренной части и которая выполняет вышеуказанное управление амортизацией колебаний подрессоренной части; часть управления ограничением изменения положения кузова, которая включает в себя часть 202 определения составляющей ограничения изменения положения кузова и которая выполняет вышеуказанное управление ограничением изменения положения кузова; и часть управления амортизацией относительных колебаний, которая включает в себя часть 204 определения составляющей амортизации относительных колебаний и которая выполняет вышеуказанное управление амортизацией относительных колебаний.
2. Второй вариант осуществления изобретения
(A) Структура системы подвески
i) Общая структура
Аналогично системе подвески согласно иллюстрированному первому варианту осуществления, система подвески для транспортного средства согласно второму варианту осуществления имеет четыре устройства подвески. Однако каждое устройство подвески во втором варианте осуществления отличается по структуре от устройств 20 подвески согласно первому варианту осуществления.
Более конкретно, в каждом устройстве подвески согласно второму варианту осуществления узел 250 пружина-исполнительный механизм, показанный на фиг. 15, применяется вместо двух винтовых пружин 46, 48 сжатия, исполнительного механизма 50, амортизатора 52 и соединяющего механизма 64, применяемых в системе подвески первого варианта осуществления. В узле 250 пружина-исполнительный механизм основная пружина, которая упруго соединяет подрессоренную часть и неподрессоренную часть, а именно пружина подвески, и электромагнитный исполнительный механизм объединены. В этом отношении основная пружина является пневмобаллонной пружиной в качестве одного вида пружины с текучей средой в качестве рабочего элемента, которая использует давление воздуха.
Система управления системы подвески согласно второму варианту осуществления имеет функции, аналогичные функциям системы управления системы подвески согласно первому варианту осуществления, кроме функции управления основной пружиной, указанной выше. Другими словами, структура управления электромагнитным исполнительным механизмом, по существу, аналогична структуре системы управления, применяемой в системе подвески согласно первому варианту осуществления.
Соответственно, следующее пояснение структуры системы подвески согласно второму варианту осуществления сфокусируется на частях, которые отличаются от системы подвески согласно первому варианту осуществления, а подробное пояснение соответствующих или похожих составляющих элементов минимизируется, но при этом используются те же ссылочные номера, что и использованные в первом варианте осуществления, чтобы идентифицировать такие элементы.
ii) Структура и функционирование узла 250 пружина-исполнительный механизм
Как показано на фиг. 15, узел 250 пружина-исполнительный механизм размещается между установочной частью 54 в качестве одного составляющего компонента подрессоренной части и вторым нижним рычагом 36 в качестве одного составляющего компонента неподрессоренной части. Узел 250 пружина-исполнительный механизм включает в себя: электромагнитный исполнительный механизм 252, который функционирует в качестве электромагнитного противоударного демпфера; соединяющий механизм 254 для соединения исполнительного механизма 252 и второго нижнего рычага 36; и пневмобаллонную пружину 256, которые объединены.
a) Структура исполнительного механизма
Исполнительный механизм 252 включает в себя: шариковый винтовой механизм 266, включающий в себя шток 262 с резьбой в качестве части с наружной резьбой, на которой сформирована резьбовая канавка 260 и резьбовая муфта 264 в качестве части с внутренней резьбой, которая содержит в себе шарики подшипника и которая навинчивается на шток 262 с резьбой; электромагнитный двигатель 268 в качестве источника энергии (далее в данном документе называемый "электродвигателем 268", где уместно); и корпус 270, который размещает шариковый винтовой механизм 266 и электродвигатель 268. Корпус 270 соединяется в своей внешней круговой части с установочной частью 54. Электродвигатель 268, который является бесщеточным электродвигателем постоянного тока, имеет полый вал 272 электродвигателя, а муфта 264 закреплена во внутренней секции нижней крайней части вала 272 электродвигателя. То есть электродвигатель 268 сконфигурирован так, чтобы передавать вращающее усилие муфте 264. Шток 262 с резьбой расположен так, чтобы проходить вниз из вала 272 электродвигателя при скручивании с муфтой 264. В исполнительном механизме 252 настоящего варианта осуществления датчик 178 угла поворота электродвигателя размещается в корпусе 270 с тем, чтобы обнаруживать угол поворота вала 272 электродвигателя.
В корпусе 270 держатель 274 штока закреплен соосно с муфтой 264. В дополнение к резьбовой канавке 260 паз 276 шлицевого соединения сформирован на штоке 262 с резьбой, который является одним составляющим элементом шарикового винтового механизма 266, и шток 262 с резьбой и держатель 274 штока соединяются шлицевым способом. Шток 262 с резьбой сконфигурирован, чтобы не иметь возможности вращаться и быть подвижным в направлении оси относительно корпуса 270 за счет механизма 278 с пазами под шарики, составленным посредством включения в него штока 264 с резьбой и держателя 274 штока.
Шток 262 с резьбой проходит вниз из корпуса 270. На нижней крайней части штока 262 с резьбой размещается элемент 280 пружинной опоры, который имеет чашеобразную конфигурацию, открывающуюся вниз, и в которой исполнительный механизм 252 соединяется со вторым нижним рычагом 36 через соединяющий механизм 254, который будет объяснен подробно.
В структуре, описанной выше, исполнительный механизм 252 имеет блок 282 со стороны подрессоренной части, неподвижно соединенный с подрессоренной частью; и блок 284 со стороны неподрессоренной части, соединенный с неподрессоренной частью через соединяющий механизм 254. Блок 282 со стороны подрессоренной части включает в себя корпус 270, электродвигатель 268, резьбовую муфту 262 и держатель 274 штока, в то время как блок 284 со стороны неподрессоренной части включает в себя шток 262 с резьбой и элемент 280 пружинной опоры.
b) Структура соединяющего механизма
Соединяющий механизм 254 включает в себя гидравлический амортизатор 290. Амортизатор 290 имеет структуру, аналогичную структуре амортизатора 52 в иллюстрированном первом варианте осуществления. Вкратце, амортизатор 290 имеет корпус 292, имеющий двухтрубную структуру и содержащий рабочую текучую среду; и поршень 294, который делит внутреннее пространство внутреннего цилиндрического элемента корпуса 292 на две камеры для текучей среды и который вставлен с возможностью скольжения во внутренний цилиндрический элемент. Амортизатор 290 сконфигурирован так, чтобы оказывать, в связи с перемещением поршня 294, сопротивление потоку рабочей текучей среды между двумя камерами для текучей среды в корпусе 292 посредством клапанов, предусмотренных на поршне 294, и сконфигурирован так, чтобы оказывать сопротивление потоку рабочей текучей среды между буферной камерой и нижней камерой для текучей среды посредством клапанов, предусмотренных на разделительной перегородке 296, а именно, потоку рабочей текучей среды через вспомогательную камеру для текучей среды, сформированную в нижней части разделительной перегородки 296.
Корпус 292 соединяется через втулку 298, расположенную в его нижней крайней части, со вторым нижним рычагом 36. Шток 300 поршня, неподвижно соединенный с нижней крайней частью штока 262 с резьбой, проходит в корпус 292, а поршень 294 соединен с нижним концом штока поршня 300. Согласно структуре, шток 262 с резьбой, а именно блок 284 со стороны неподрессоренной части, соединяется со вторым нижним рычагом 36 через амортизатор 290.
Круглое нижнее седло 302 пружины прикрепляется к внешней круговой части корпуса 292 амортизатора. Цилиндрический опорный элемент 304 прикрепляется к нижнему седлу 302 пружины так, что цилиндрический опорный элемент 304 вмещает корпус 292. Внутреннее фланцевидное верхнее седло 306 пружины предусмотрено в верхней крайней части цилиндрического опорного элемента 304. Пружинный опорный элемент 280, поясненный выше, прикрепляется к штоку 262 с резьбой и штоку 290 поршня в месте соединения между ними. Пружинный опорный элемент 280 размещается в цилиндрическом опорном элементе 304, в то же время вмещая в себя верхнюю конечную часть корпуса 292. Поблизости от нижней крайней части пружинного опорного элемента 280 предусмотрено внешнее фланцевидное промежуточное седло 308 пружины.
Винтовая пружина 310 сжатия размещается в сжатом состоянии между верхним седлом 306 пружины и промежуточным седлом 308 пружины, в то же время винтовая пружина 312 сжатия размещается в сжатом состоянии между промежуточным седлом 308 пружины и нижним седлом 302 пружины. Две винтовых пружины 310, 312 сжатия работают совместно друг с другом, чтобы функционировать в качестве опорной пружины, чтобы обеспечивать возможность пружинному опорному элементу 280, а именно - блоку 284 со стороны неподрессоренной части, плавающим образом поддерживаться неподрессоренной частью, благодаря ее силе упругости.
В структуре, описанной выше, соединяющий механизм 254 допускает перемещение блока 284 со стороны неподрессоренной части относительно неподрессоренной части. Относительное смещение блока 284 со стороны неподрессоренной части и неподрессоренной части при их относительном перемещении ограничивается механизмом 314 ограничения относительного смещения, который включен в соединяющий механизм 254. Более конкретно, в случае, когда блок 284 со стороны неподрессоренной части и неподрессоренная часть перемещаются относительно друг друга в направлении друг от друга, резиновая подушка 316, прикрепленная к поршню 294, впритык соприкасается с нижней поверхностью внутренней крышки корпуса 292 амортизатора 290, таким образом, ограничивая относительное перемещение друг от друга. Другими словами, в случае, когда блок 284 со стороны неподрессоренной части и неподрессоренная часть перемещаются относительно друг друга в направлении друг к другу, резиновая подушка 318, прикрепленная к внутренней части пружинного опорного элемента 280 впритык соприкасается с верхней поверхностью внешней крышки корпуса 292, таким образом, ограничивая относительное перемещение друг к другу. То есть механизм 314 ограничения относительного смещения составляется посредством включения в него внутренней крышки и внешней крышки корпуса 292 и двух резиновых подушек 316, 318. Как и в иллюстрированном первом варианте осуществления, диапазон относительного перемещения ограничивается механизмом 314 ограничения относительного смещения так, чтобы удерживаться в допустимом диапазоне ∆W относительного перемещения, показанном на фиг. 15.
В настоящем устройстве 20 подвески механизм ограничителя прямого хода и механизм ограничителя обратного хода для хода перемещения подрессоренной части и неподрессоренной части предусмотрены в узле 250 пружина-исполнительный механизм. Перемещение подрессоренной части и неподрессоренной части по направлению друг к другу ограничивается соприкосновением стопорной пластины 320, предусмотренной на верхнем конце цилиндрического опорного элемента 304, впритык с резиновой подушкой 322, предусмотренной на корпусе 270 блока 282 со стороны неподрессоренной части, или соприкосновением нижней крайней поверхности секции корпуса 270, в которой размещается держатель 274 штока, впритык с резиновой подушкой 324, предусмотренной на верхней поверхности пружинного опорного элемента 280. С другой стороны, перемещение подрессоренной части и неподрессоренной части друг от друга ограничивается соприкосновением пластины 320 стопора впритык с резиновой подушкой 328, предусмотренной во внутренней фланцевой части на нижнем конце юбки 326, которая прикреплена к корпусу 270. Отметим, что вышеуказанный допустимый диапазон ∆W относительного перемещения сделан меньшим, чем допустимый диапазон хода.
c) Структура пневмобаллонной пружины
Пневмобаллонная пружина 256 включает в себя: оболочку 340 камеры, соединенную с установочной частью 54; поршень пневматического цилиндра 342, который прикрепляется к корпусу 292 амортизатора 290 и, таким образом, соединяется со вторым нижним рычагом 36; и диафрагму 344, соединяющую оболочку 340 камеры и поршень пневматического цилиндра 342.
Оболочка 340 камеры имеет часть 346 крышки, которая соединяется с корпусом 270 исполнительного механизма 252 через пружинную опору 348, включающую в себя резиновую деталь для амортизации колебаний. Часть 346 крышки соединяется с установочной частью 54 через верхнюю опору 350, включающую в себя резиновый элемент для амортизации колебаний. Поршень пневматического цилиндра 342 прикрепляется в своей нижней конечной части к внешней круговой части цилиндрического опорного элемента 304 соединяющего механизма 254, в то же время размещая в себе верхнюю часть цилиндрического опорного элемента 304 и юбку 326, прикрепленную к корпусу 270.
Диафрагма 344 прикрепляется на одном своем конце к нижней конечной части оболочки 340 камеры прикрепляется на другом своем конце к верхней конечной части поршня пневматического цилиндра 342. Оболочка 340 камеры, поршень пневматического цилиндра 342 и диафрагма 344 работают совместно друг с другом, чтобы образовывать компрессионную камеру 352, которая заполняется сжатым воздухом в качестве текучей среды.
В структуре, описанной выше, пневмобаллонная пружина 256 упруго соединяет, благодаря давлению сжатого воздуха, второй нижний рычаг 36 и установочную часть 54, а именно подрессоренную часть и неподрессоренную часть. Когда предполагается, что винтовые пружины 310, 312 сжатия составляют одну пружину, жесткость одной пружины задается большей, чем жесткость пневмобаллонной пружины 256.
d) Функционирование узла 250 пружина-исполнительный механизм
В настоящем устройстве 20 подвески блок 282 со стороны подрессоренной части исполнительного механизма 252 в качестве неподвижного блока неподвижно соединен с подрессоренной частью в качестве части поддержки неподвижного блока, в то время как блок 284 со стороны неподрессоренной части в качестве плавающего блока плавающим образом поддерживается неподрессоренной частью в качестве части поддержки плавающего блока.
Когда подрессоренная часть и неподрессоренная часть перемещаются по направлению друг к другу и друг от друга, блок 282 со стороны подрессоренной части и блок 284 со стороны неподрессоренной части перемещаются относительно друг друга в связи с величиной хода подрессоренной части и неподрессоренной части. Благодаря относительному перемещению резьбовая муфта 264 поворачивается вместе с валом 272 электродвигателя, при этом шток 262 с резьбой и резьбовая муфта 264 перемещаются относительно друг друга в направлении оси. Электродвигатель 268 сконфигурирован так, чтобы передавать вращающее усилие муфте 264. Благодаря вращательному усилию, передаваемому от электродвигателя 268, исполнительный механизм 252 формирует усилие исполнительного механизма в качестве противодействующего усилия или движущего усилия в отношении относительного перемещения блока 282 со стороны подрессоренной части и блока 284 со стороны неподрессоренной части.
Усилие исполнительного механизма действует на подрессоренную часть и неподрессоренную часть через соединяющий механизм 254. Соединяющий механизм 254 имеет структуру, в которой винтовые пружины 310, 312 сжатия вставлены между неподрессоренной частью и блоком 284 со стороны неподрессоренной части. То есть в настоящем устройстве 20 подвески блок 284 со стороны неподрессоренной части плавающим образом поддерживается неподрессоренной частью благодаря винтовым пружинам 310, 312 сжатия. В этой структуре усилие исполнительного механизма действует на подрессоренную часть и неподрессоренную часть с некоторым отставанием по времени или задержкой. Ввиду этого, настоящий узел 250 пружина-исполнительный механизм сконфигурирован так, что соединяющий механизм 254 имеет амортизатор 290, расположенный между неподрессоренной частью и блоком 284 со стороны неподрессоренной части, таким образом, улучшая быстроту реакции усилия исполнительного механизма.
В дополнение к функционированию в качестве обычной пружины подвески пневмобаллонная пружина 256 имеет функцию изменения расстояния между подрессоренной частью и неподрессоренной частью, разрешая воздуху протекать внутрь или выпускаться из компрессионной камеры 352. Используя функцию, система подвески согласно настоящему варианту осуществления конфигурируется так, чтобы изменять и регулировать расстояние между кузовом транспортного средства и поверхностью дороги, а именно, высоту транспортного средства. Описание структуры и управления, касающихся изменения и регулировки высоты транспортного средства опущены.
(B) Управление электромагнитным исполнительным механизмом
В системе подвески согласно настоящему варианту осуществления выполняются виды управления, аналогичные управлению амортизацией колебаний подрессоренной части и управлению ограничением изменения положения кузова, выполняемым в системе подвески согласно иллюстрированному первому варианту осуществления. Касаясь управления амортизацией относительных колебаний, первое управление амортизацией относительных колебаний, выполняемое в системе подвески согласно иллюстрированному первому варианту осуществления, не выполняется, а выполняется только управление, аналогичное второму управлению амортизацией относительных колебаний. В дополнение к этим управлениям управление амортизацией колебаний неподрессоренной части, описанное ниже, выполняется в системе подвески согласно настоящему варианту осуществления. В то время как эти управления будут описаны далее в данном документе по порядку, объяснения, аналогичные объяснениям в иллюстрированном первом варианте осуществления, будут минимизированы.
i) Управление амортизацией колебаний подрессоренной части
Модель реального устройства 20 подвески системы подвески согласно настоящему варианту осуществления показана на фиг. 16(a). Как и в модели реального устройства, поясненной относительно иллюстрированного первого варианта осуществления, эта модель колебаний включает в себя массу MU подрессоренной части, массу ML неподрессоренной части и промежуточную массу MI. Промежуточная масса MI включает в себя преобразованную массу тела вращения в случае, когда резьбовая муфта 264 и роторная часть электродвигателя 268, такая как вал 272 электродвигателя рассматриваются как одно тело вращения, более конкретно, преобразованную массу, полученную преобразованием инерционного момента тела вращения в инерциальную массу при перемещении блока 284 со стороны неподрессоренной части вверх и вниз.
Как и в модели реального устройства в иллюстрированном первом варианте осуществления, модель реального устройства в настоящем варианте осуществления включает в себя исполнительный механизм A, соответствующий исполнительному механизму 252, расположенному между массой MU подрессоренной части и промежуточной массой MI. Дополнительно, между массой ML неподрессоренной части и поверхностью дороги размещается пружина, соответствующая шине, а именно пружина K3, имеющая жесткость K3 пружины. В отличие от модели реального устройства в иллюстрированном первом варианте осуществления модель реального устройства в настоящем варианте осуществления включает в себя, между массой MU подрессоренной части и массой ML неподрессоренной части, основную пружину, соответствующую пневмобаллонной пружине 256, а именно пружину K4, имеющую жесткость K4 пружины. Между промежуточной массой MI и массой ML неподрессоренной части размещается пружина, соответствующая опорной пружине, состоящей из винтовых пружин 310, 312 сжатия, а именно пружина K5, имеющая жесткость K5 пружины. Дополнительно, амортизатор, соответствующий амортизатору 252, а именно амортизатор C2, имеющий коэффициент C2 демпфирования, размещается параллельно с пружиной K5. Поскольку амортизатор С2 существует для улучшения быстроты реакции усилия исполнительного механизма, как объяснено выше, коэффициент С2 демпфирования устанавливается в подходящее значение, чтобы достигать цели.
Модель управления в качестве теоретической модели управления исполнительным механизмом 252 показана на фиг. 16(b). Как и в модели управления иллюстрированного первого варианта осуществления, масса MU подрессоренной части подвешивается амортизатором CS, имеющим коэффициент CS демпфирования в модели управления настоящего варианта осуществления.
Как и в иллюстрированном первом варианте осуществления, управление амортизацией колебаний подрессоренной части выполняется на исполнительных механизмах 252 соответствующих четырех устройств 20 подвески независимо друг от друга. Работа каждого электродвигателя 268 управляется так, что соответствующий исполнительный механизм 252 формирует, в качестве составляющей FU амортизации колебаний подрессоренной части, усилие исполнительного механизма согласно следующей формуле на основе скорости VU подрессоренной части:
FU=CS•VU
Конкретная методика управления амортизацией колебаний подрессоренной части аналогична методике в иллюстрированном первом варианте осуществления, так что ее повторное описание не приводится.
ii) Управление амортизацией колебаний неподрессоренной части
Управление амортизацией неподрессоренной части основана на так называемой теории квази-амортизатора типа «groundhook» и выполняется на исполнительного механизмах 252 соответствующих четырех устройств 20 подвески независимо друг от друга. В модели управления, показанной на фиг. 16(b), масса ML неподрессоренной части поддерживается виртуальной линией поверхности дороги (линией земли) через амортизатор CG, имеющий коэффициент CG демпфирования. Поскольку амортизатор CG является амортизатором на основе теории такого амортизатора, амортизатор CG далее в данном документе называется "амортизатором CG", где уместно.
При управлении амортизацией колебаний неподрессоренной части исполнительный механизм 252 управляется так, что усилие исполнительного механизма, которое должно быть сформировано исполнительным механизмом A в модели реального устройства, становится равным усилию, соответствующему демпфирующему усилию, которое должно быть сформировано амортизатором CG в модели управления. Более конкретно, скорость VL неподрессоренной части, т.е. скорость перемещения (абсолютная скорость) неподрессоренной части первоначально вычисляется на основе вертикального ускорения GL неподрессоренной части (далее в данном документе называемого "ускорением GL неподрессоренной части", где уместно), обнаруженного датчиком 188 вертикального ускорения неподрессоренной части, и работа электродвигателя 268 управляется так, чтобы формировать, в качестве составляющей FL амортизации колебаний неподрессоренной части, усилие исполнительного механизма согласно следующей формуле, т.е. усилие исполнительного механизма, имеющее величину в соответствии со скоростью VL неподрессоренной части
FL=CG•VL
Коэффициент CG демпфирования может рассматриваться как коэффициент усиления системы управления и устанавливается в значение, подходящее для эффективной амортизации колебаний на резонансной частоте и около резонансной частоты неподрессоренной части.
iii) Управление ограничением изменения положения кузова
Управление ограничением изменения положения кузова реализовано для ограничения наклона относительно продольной оси и наклона относительно поперечной оси кузова транспортного средства и выполняется способом, аналогичным способу в иллюстрированном первом варианте осуществления. Тогда как не объяснено подробно, составляющая FR ограничения наклона относительно продольной оси определяется согласно следующей формуле на основе поперечного ускорения GY, указанного выше:
FR=β•GY (β: коэффициент усиления системы управления)
Составляющая FP ограничения наклона относительно поперечной оси определяется согласно следующей формуле на основе фактического продольного ускорения GX:
FP=γ•GX (γ: коэффициент усиления системы управления)
iv) Управление амортизацией относительных колебаний
В каждом устройстве 20 подвески системы подвески согласно иллюстрированному первому варианту осуществления блок 284 со стороны неподрессоренной части исполнительного механизма 252 плавающим образом поддерживается относительно неподрессоренной части. Соответственно, блок 284 со стороны неподрессоренной части как плавающий блок колеблется относительно неподрессоренной части в качестве части поддержки плавающего блока. Аналогично управлению амортизацией относительных колебаний в первом варианте осуществления управление амортизацией относительных колебаний в настоящем варианте осуществления по замыслу имеет дело с относительными колебаниями.
В модели управления, показанной на фиг. 16(b), между промежуточной массой MI и массой MU подрессоренной части размещается демпфирующий относительные колебания амортизатор CR, имеющий коэффициент CR демпфирования, в качестве амортизатора для демпфирования относительных колебаний блока 284 со стороны неподрессоренной части. Управление амортизацией относительных колебаний в настоящем варианте осуществления зависит от модели управления и аналогично второму управлению амортизацией относительных колебаний в первом варианте осуществления. При управлении амортизацией относительных колебаний в настоящем варианте осуществления каждый исполнительный механизм 252 управляется так, что усилие исполнительного механизма, которое должно быть сформировано исполнительным механизмом A в модели реального устройства, становится равным усилию, которое соответствует демпфирующему усилию, которое должно быть сформировано демпфирующим относительные колебания амортизатором CR.
Конкретная методика управления аналогична методике иллюстрированного второго управления амортизацией относительных колебаний. То есть, работа электромотора 268 управляется, чтобы формировать, в качестве составляющей FI амортизации относительных колебаний, усилие исполнительного механизма согласно следующей формуле на основе скорости VIU относительного перемещения блока 284 со стороны неподрессоренной части и блока 282 со стороны подрессоренной части:
FI=CR•VIU
Коэффициент CR демпфирования демпфирующего относительные колебания амортизатора CR устанавливается в значение, подходящее для эффективной амортизации относительных колебаний блока 284 со стороны неподрессоренной части на резонансной частоте и около резонансной частоты.
Управление амортизацией относительных колебаний в настоящем варианте осуществления выполняется только в ситуации, в которой конкретная частотная составляющая интенсивности относительных колебаний блока 282 со стороны неподрессоренной части выше, чем пороговое значение, в соответствии с условиями выполнения, аналогичными условиям в управлении амортизацией относительных колебаний иллюстрированного первого варианта осуществления. Дополнительно, в попытке предотвратить или смягчить удар, благодаря предоставлению механизма 314 ограничения относительного смещения, составляющая FI амортизации относительных колебаний корректируется как и в управлении первого варианта осуществления. Конкретные методики относительно выполнения управления на основе условий выполнения и относительно корректировки составляющей FI амортизации относительных колебаний подобны методикам в первом варианте осуществления.
v) Синхронизация управлений
Вышеуказанное управление амортизацией колебаний подрессоренной части, управление амортизацией колебаний неподрессоренной части, управление ограничением изменения положения кузова и управление амортизацией относительных колебаний выполняются комплексно, и составляющая FU амортизации колебаний подрессоренной части в управлении амортизацией колебаний подрессоренной части, составляющая FL амортизации колебаний неподрессоренной части в управлении амортизацией колебаний неподрессоренной части, составляющая FR ограничения наклона относительно продольной оси и составляющая FP ограничения наклона относительно поперечной оси в управлении ограничением изменения положения кузова и составляющая FI амортизации относительных колебаний (а именно скорректированная составляющая FIA амортизации относительных колебаний) в управлении амортизацией относительных колебаний рассматриваются объединенным образом. Более конкретно, эти составляющие FU, FL, FR, FP, FIA суммируются согласно следующей формуле, таким образом, комплексное усилие F исполнительного механизма, которое должно быть сформировано исполнительным механизмом 252, определяется как:
F=FU+FL+FR+FP+FIA
Как и в первом варианте осуществления, скважность D электродвигателя 268 каждого исполнительного механизма 252 определяется на основе комплексного усилия F исполнительного механизма, которое должно быть сформировано каждым исполнительным механизмом 252, и команда относительно определенной скважности D отправляется соответствующему инвертеру 172. Каждый инвертер 172 выполняет управление работой электродвигателя 268 соответствующего исполнительного механизма на основе скважности D.
v) Программа управления
Управление каждым исполнительным механизмом 252 выполняется так, что программа управления исполнительным механизмом, указанная блок-схемой последовательности операций на фиг. 17, осуществляется посредством ЭБУ 170. Аналогично программе управления исполнительным механизмом в первом варианте осуществления программа в настоящем варианте осуществления циклически осуществляется для каждого исполнительного механизма 252 в коротких интервалах времени (например, от нескольких миллисекунд до нескольких десятков миллисекунд), когда переключатель зажигания транспортного средства переведен во включенное состояние.
В процессе согласно программе управления исполнительным механизмом этап S101 первоначально осуществляется, чтобы выполнять подпрограмму определения составляющей амортизации колебаний подрессоренной части, указанную блок-схемой последовательности операций на фиг. 10. Далее, осуществляется этап S102, чтобы выполнять подпрограмму для определения составляющей амортизации колебаний неподрессоренной части, указанную блок-схемой последовательности операций на фиг. 18. Следом за этапом S102 следует этап S103, на котором осуществляется подпрограмма для определения составляющей ограничения изменения положения кузова, указанная блок-схемой последовательности операций на фиг. 11. В отличие от системы подвески первого варианта осуществления система подвески в настоящем варианте осуществления сконфигурирована, чтобы выполнять только одно управление в качестве управления амортизацией относительных колебаний. Соответственно, после этапа S103 поток управления переходит к этапу S104, чтобы определять составляющую FIA амортизации относительных колебаний согласно управлению амортизацией относительных колебаний, установленному в настоящей системе. На этапе S104 осуществляется подпрограмма, по существу, аналогичная подпрограмме для определения второй составляющей амортизации относительных колебаний, указанная блок-схемой последовательности операций на фиг. 13.
В процессе согласно вышеуказанным подпрограммам соответственно определяются составляющая FU амортизации колебаний подрессоренной части, составляющая FL амортизации колебаний неподрессоренной части, составляющая FR ограничения наклона относительно продольной оси и составляющая FP ограничения наклона относительно поперечной оси и скорректированная составляющая FIA амортизации относительных колебаний (которая получается корректировкой составляющей FI амортизации относительных колебаний), каждая из которых является составляющей усилия исполнительного механизма, согласно методике, поясненной выше.
После того как составляющие FU, FL, FR, FP, FIA определены, осуществляется этап S105, чтобы суммировать составляющие FU, FL, FR, FP, FIA, так что определяется комплексное усилие F исполнительного механизма. Далее, на этапе S106, команда относительно скважности D отправляется инвертеру 172 на основе определенного усилия F исполнительного механизма. После того как процесс на этапе S106 завершен, одно выполнение программы управления исполнительным механизмом заканчивается. Как и в первом варианте осуществления, процесс на каждом из этапов, которые составляют программу управления исполнительным механизмом, и подпрограммы могут быть легко поняты посредством обращения к вышеприведенному объяснению, и мы обойдемся без подробного их объяснения.
(C) Функциональная структура контроллера
ЭБУ 170 в системе подвески согласно настоящему варианту осуществления функционирует как контроллер для управления усилием исполнительного механизма, которое должно быть сформировано каждым из электромагнитных исполнительных механизмов 252. ЭБУ 170 может рассматриваться как имеющий функциональную структуру, показанную на фиг. 19, с точки зрения функции ЭБУ 170.
Аналогично ЭБУ 170 в первом варианте осуществления ЭБУ 170 в настоящем варианте осуществления включает в себя часть 200 определения составляющей амортизации колебаний подрессоренной части, часть 202 определения составляющей ограничения изменения положения кузова и часть 204 определения составляющей амортизации относительных колебаний. Кроме того, ЭБУ 170 включает в себя часть 370 определения составляющей амортизации колебаний неподрессоренной части в качестве функциональной части для определения составляющей FL амортизации колебаний неподрессоренной части. Часть 200 определения составляющей амортизации колебаний подрессоренной части, часть 370 определения составляющей амортизации колебаний неподрессоренной части, часть 202 определения составляющей ограничения изменений положения кузова и часть 204 определения составляющей амортизации относительных колебаний соответственно представляют собой части ЭБУ 170, которые выполняют процесс на этапе S101, процесс на этапе S102, процесс на этапе S103 и процесс на этапе S104, соответственно.
Аналогично ЭБУ 170 в первом варианте осуществления, ЭБУ 170 в настоящем варианте осуществления дополнительно включает в себя часть 206 определения усилия исполнительного механизма в качестве части, которая выполняет процесс на этапе S105, а именно в качестве части для определения усилия F исполнительного механизма, которое должно формироваться каждым исполнительным механизмом 252, путем объединения составляющих FU, FL, FR, FP, FI, (FIA). Кроме того, ЭБУ 170 включает в себя часть 208 отправки команды скважности в качестве части, которая выполняет процесс на этапе S106, а именно в качестве части для отправки команды относительно скважности D инвертеру 172 соответствующего исполнительного механизма 252 на основе усилия F исполнительного механизма.
Согласно функциональной структуре, описанной выше, ЭБУ 170 в настоящем варианте осуществления может рассматриваться как содержащий следующие четыре части управления для выполнения соответствующих четырех управлений: часть управления амортизацией колебаний подрессоренной части, которая включает в себя часть 200 определения составляющей амортизации колебаний подрессоренной части и которая выполняет вышеуказанное управление амортизацией колебаний подрессоренной части; часть управления амортизацией колебаний неподрессоренной части, которая включает в себя часть 370 определения составляющей амортизации колебаний неподрессоренной части и которая выполняет вышеуказанное управление амортизацией колебаний неподрессоренной части; часть управления ограничением изменения положения кузова, которая включает в себя часть 202 определения составляющей ограничения изменения положения кузова и которая выполняет вышеуказанное управление ограничением изменения положения кузова; и часть управления амортизацией относительных колебаний, которая включает в себя часть 204 определения составляющей амортизации относительных колебаний и которая выполняет вышеуказанное управление амортизацией относительных колебаний.
3. Другие варианты осуществления изобретения
Система подвески в иллюстрированном втором варианте осуществления сконфигурирована так, чтобы выполнять только второе управление амортизацией относительных колебаний в качестве управления амортизацией относительных колебаний. Система подвески во втором варианте осуществления может быть сконфигурирована так, чтобы выполнять первое управление амортизацией относительных колебаний, применяемое в системе подвески в иллюстрированном первом варианте осуществления, вместо второго управления амортизацией относительных колебаний. Альтернативно, система подвески во втором варианте осуществления может быть сконфигурирована так, чтобы выборочно выполнять первое управление амортизацией относительных колебаний и второе управление амортизацией относительных колебаний. С другой стороны, система подвески в первом варианте осуществления может быть сконфигурирована так, чтобы выполнять только одно из первого и второго управлений амортизацией относительных колебаний.
Каждая из систем подвески иллюстрированного первого и второго варианта осуществления сконфигурирована, чтобы выполнять управление амортизацией относительных колебаний только в ситуации, в которой составляющая интенсивности колебаний в конкретном диапазоне частот увеличивается до определенной степени. Управление амортизацией относительных колебаний может выполняться все время. Дополнительно, управление амортизацией относительных колебаний может быть сконфигурировано, чтобы не выполнять корректировку составляющей FI амортизации относительных колебаний на основе величины W относительного смещения.
В то время как система подвески первого варианта осуществления сконфигурирована так, чтобы не выполнять управление амортизацией колебаний неподрессоренной части, система подвески может быть сконфигурирована так, чтобы выполнять управление амортизацией колебаний неподрессоренной части. Наоборот, в то время как система подвески второго варианта осуществления сконфигурирована, чтобы выполнять управление амортизацией колебаний неподрессоренной части, система подвески может быть сконфигурирована, чтобы не выполнять управление амортизацией колебаний неподрессоренной части.
Каждая из систем подвески иллюстрированного первого и второго варианта осуществления сконфигурирована так, чтобы ограничивать как наклон относительно продольной оси, так и наклон относительно поперечной оси кузова транспортного средства при управлении ограничением изменения положения кузова. Каждая система подвески может быть сконфигурирована так, чтобы ограничивать только одно из наклона относительно продольной оси и наклона относительно поперечной оси кузова транспортного средства. Дополнительно, каждая система подвески может быть сконфигурирована так, чтобы не выполнять управление ограничением изменения положения кузова.
Система подвески первого варианта осуществления может быть снабжена гидравлическим амортизатором, сконфигурированным так, чтобы формировать силу сопротивления против относительного перемещения подрессоренной части и неподрессоренной части, а именно амортизатор, похожий на амортизатор 290 системы подвески второго варианта осуществления, вместо или в дополнение к гидравлическому амортизатору 52. Наоборот, система подвески второго варианта осуществления может быть снабжена гидравлическим амортизатором, сконфигурированным так, чтобы формировать силу сопротивления против относительного перемещения блока 284 со стороны неподрессоренной части и неподрессоренной части, а именно амортизатор, похожий на амортизатор 52 системы подвески первого варианта осуществления, вместо или в дополнение к гидравлическому амортизатору 290.
В каждой из систем подвески первого и второго вариантов осуществления блок со стороны неподрессоренной части сформирован как плавающий блок. Система подвески согласно настоящему изобретению может быть системой подвески, в которой блок со стороны подрессоренной части сформирован как плавающий блок.
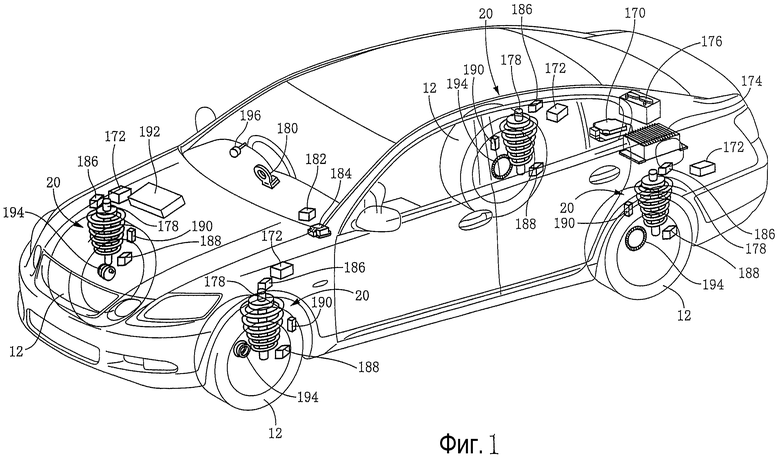
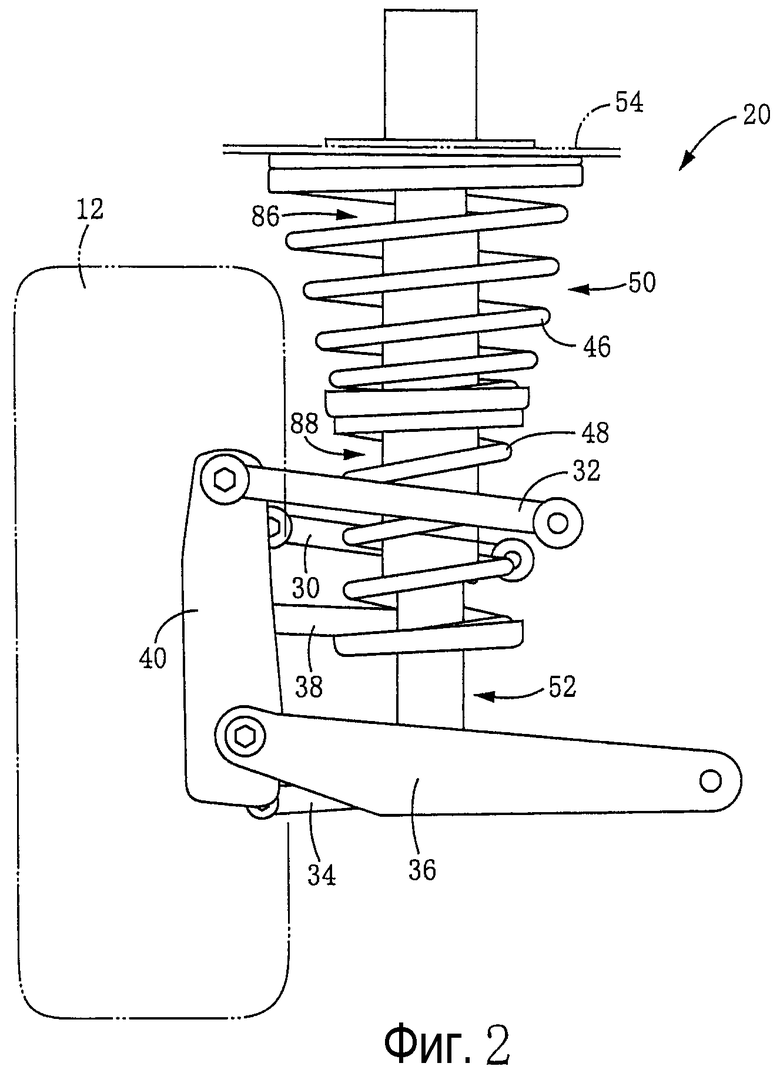
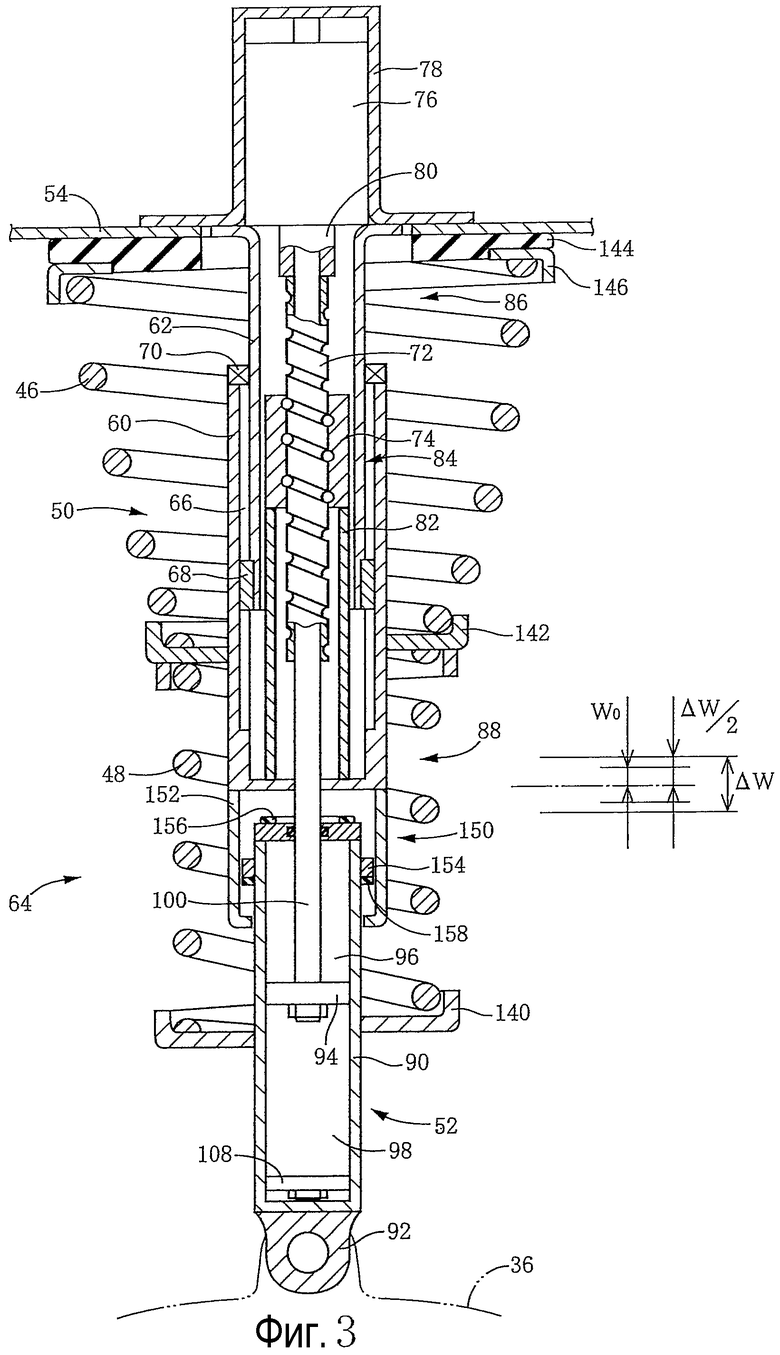
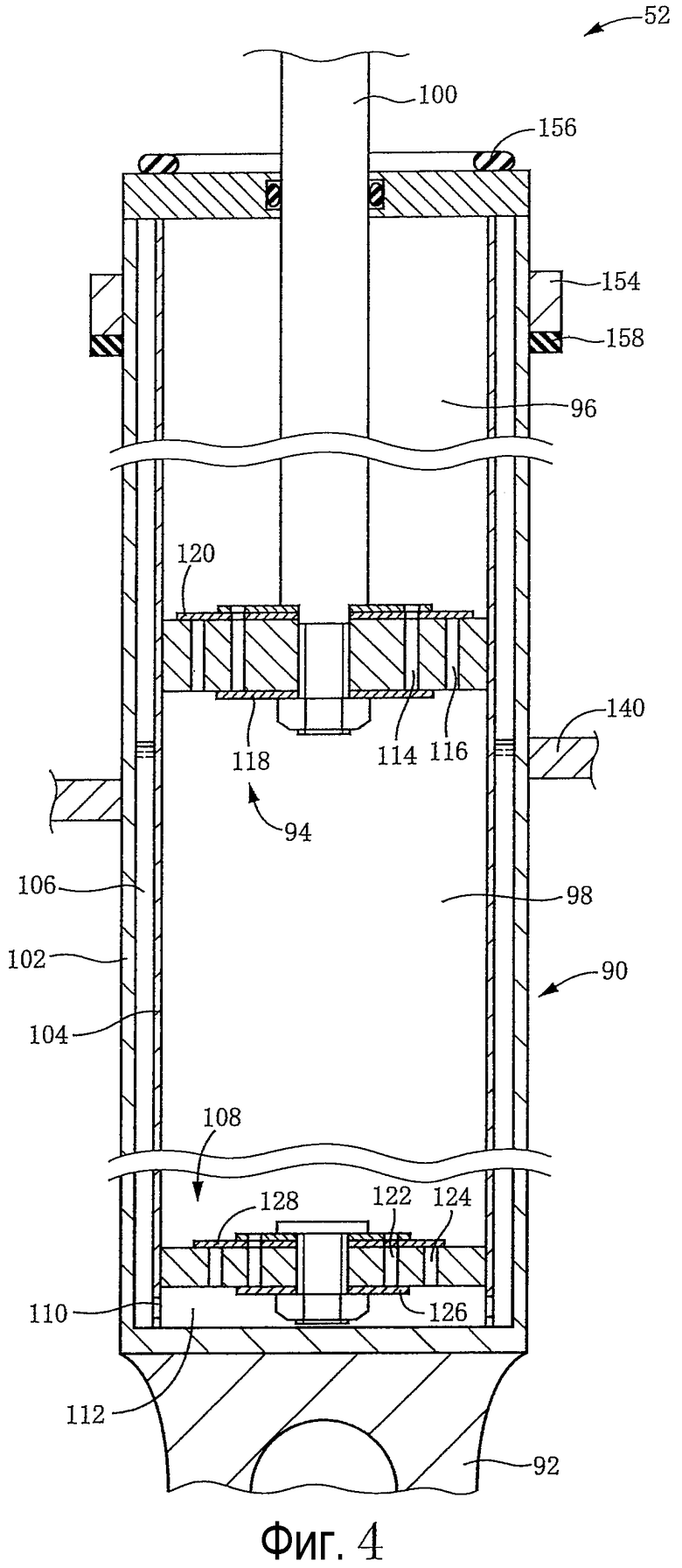
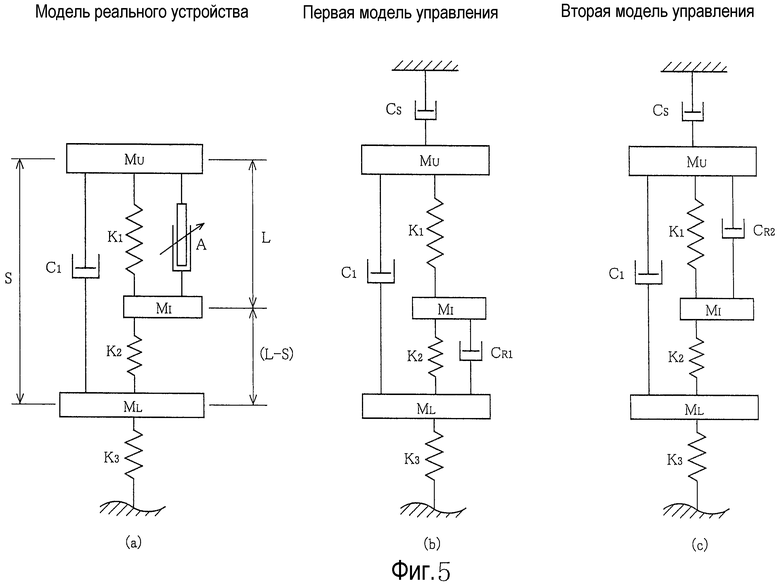
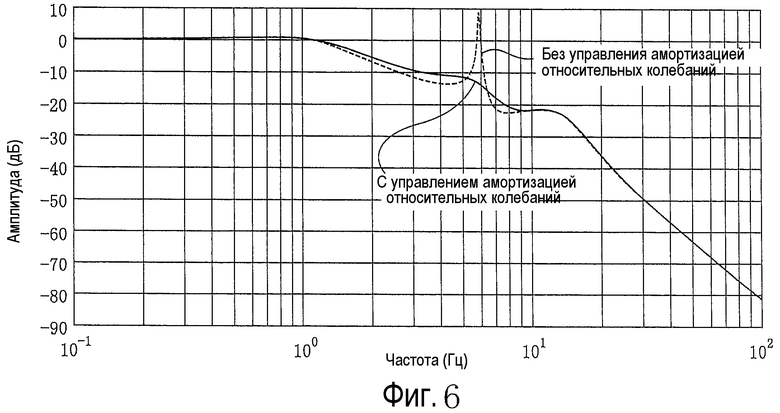
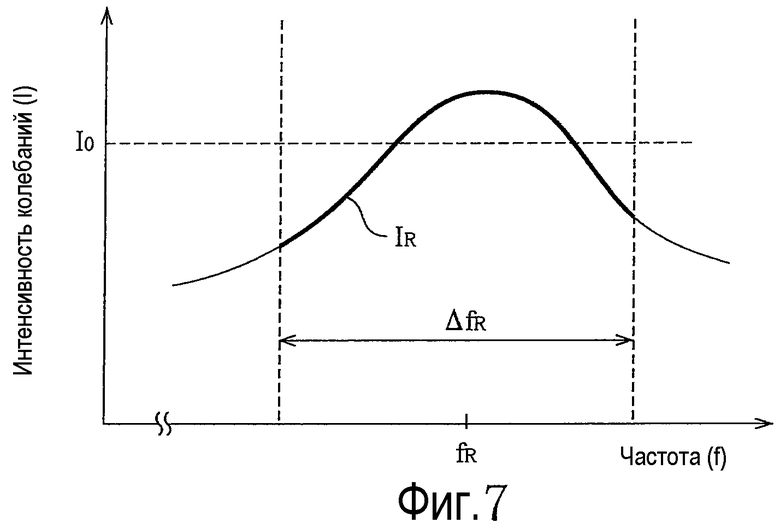
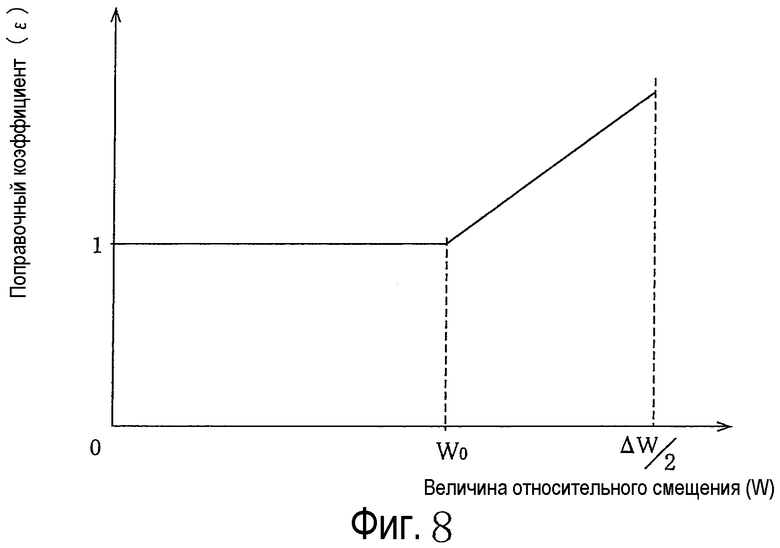
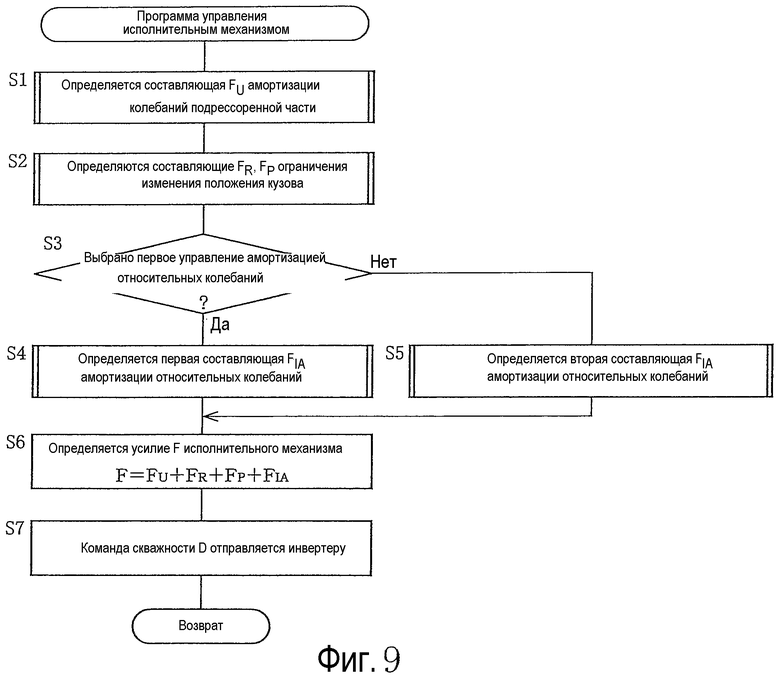
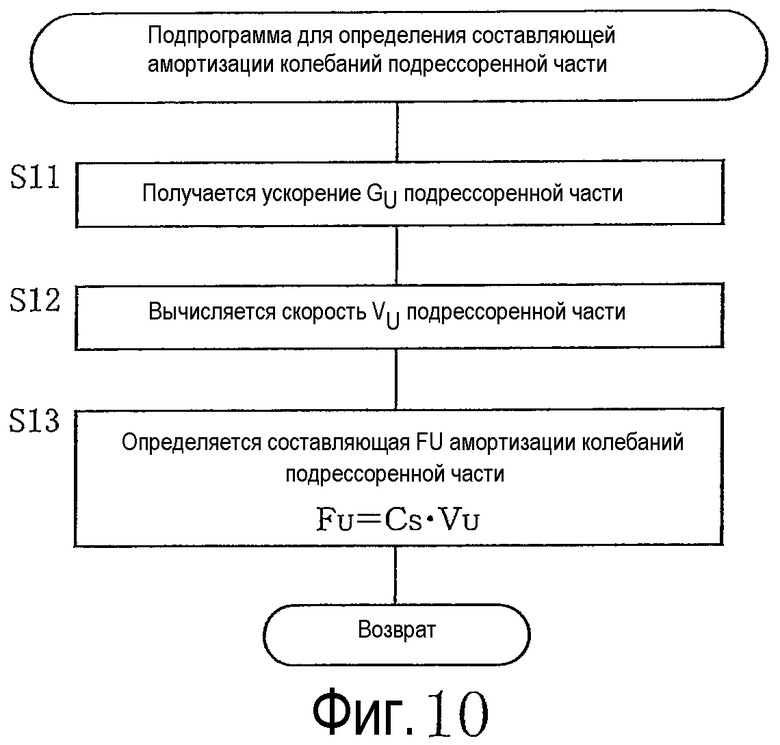
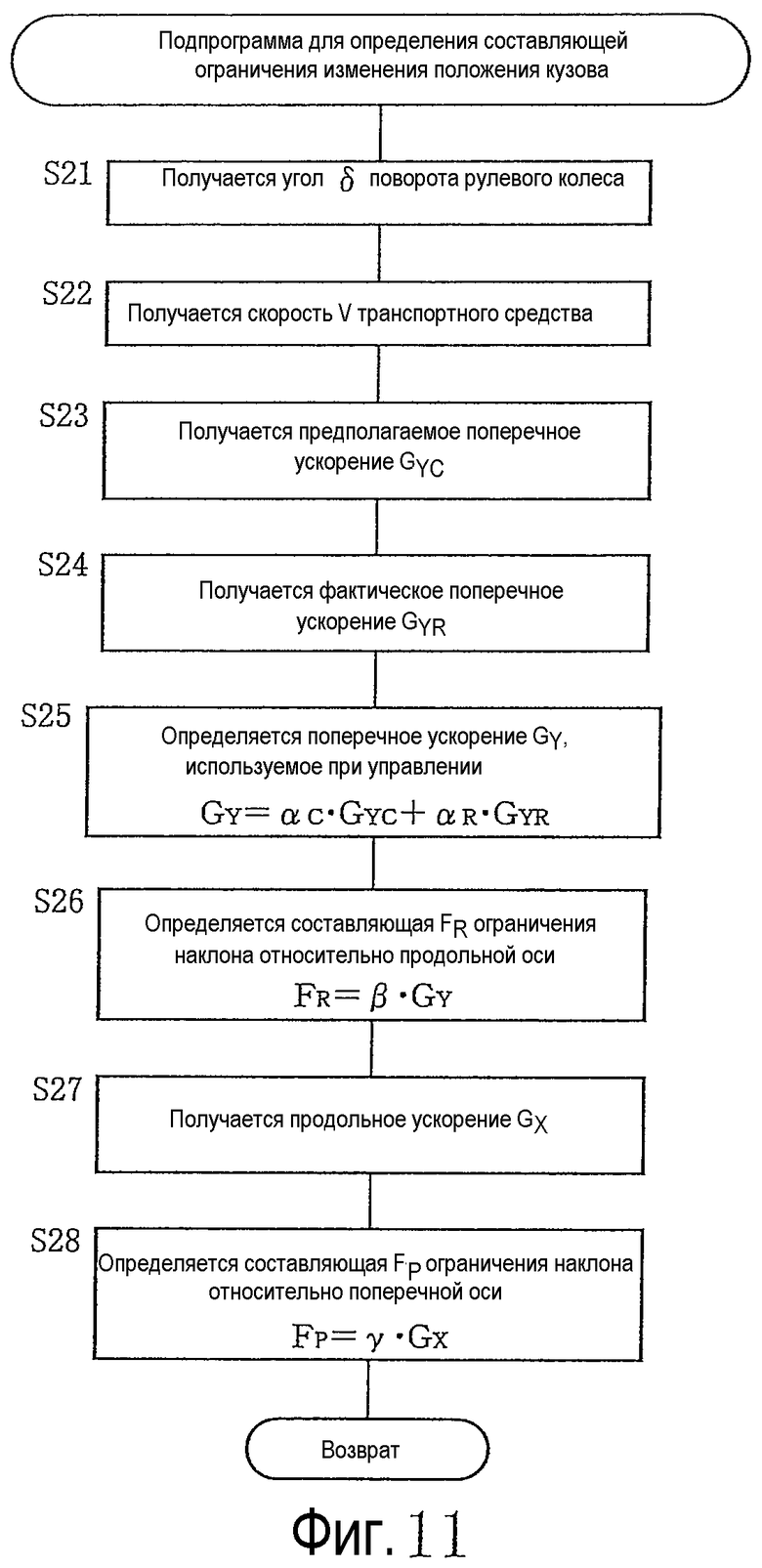
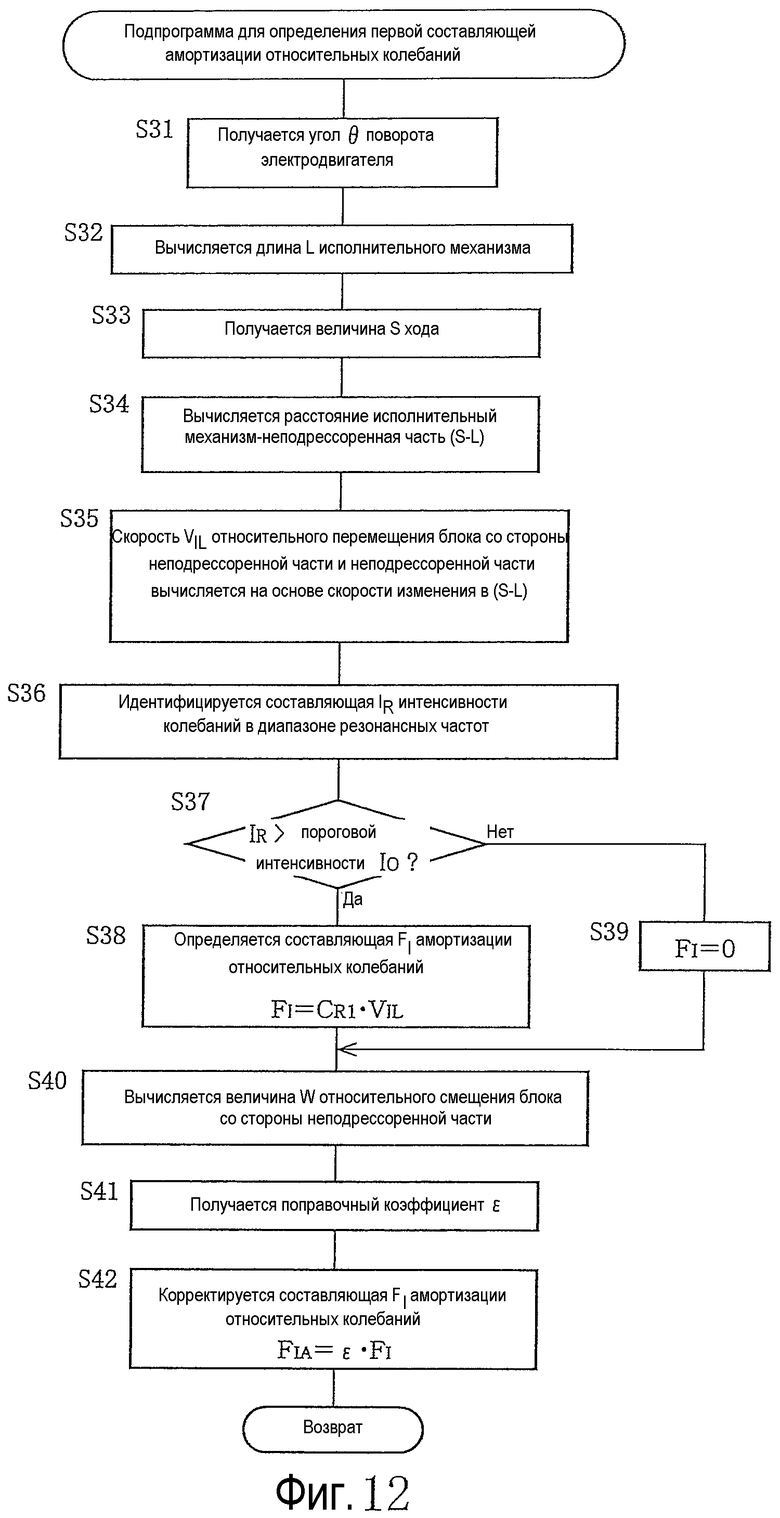
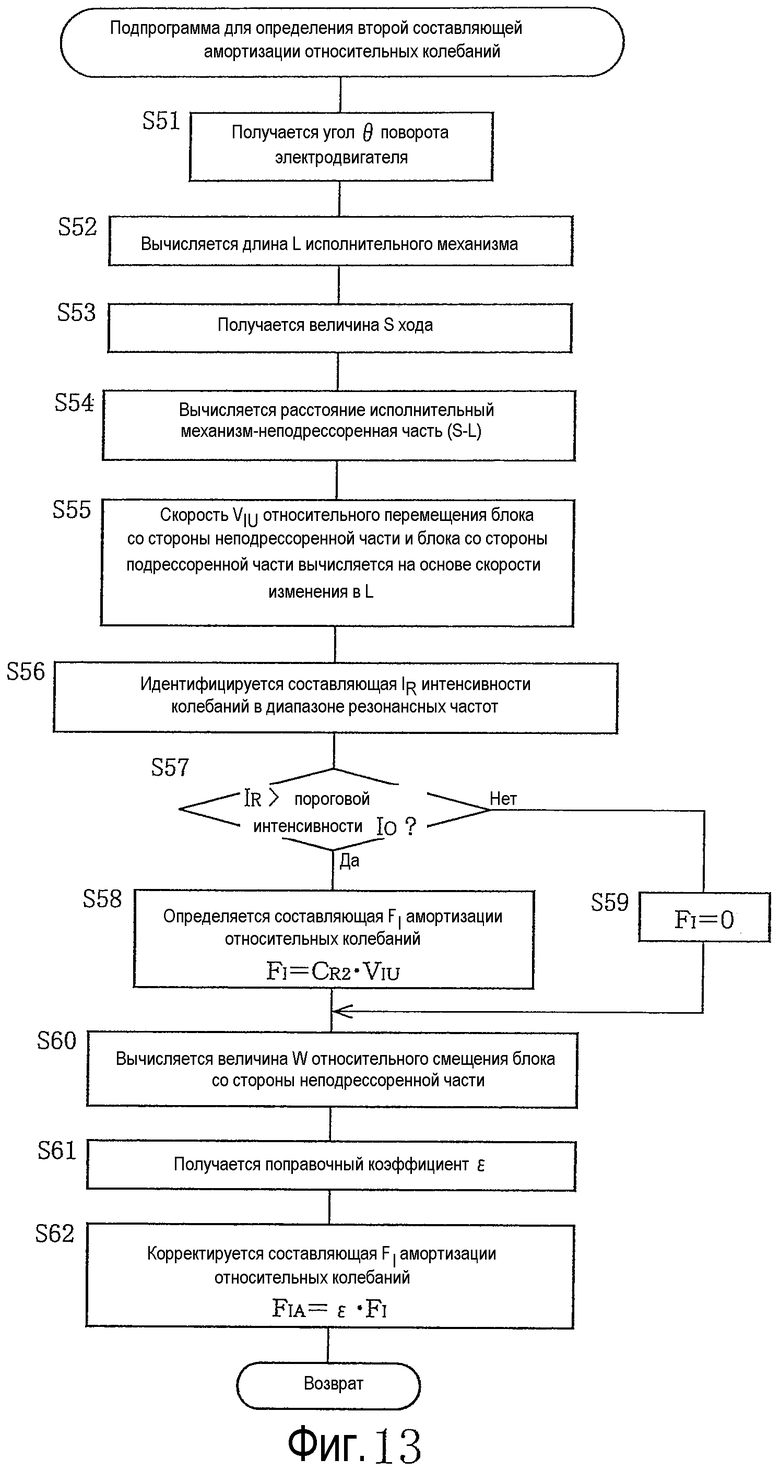
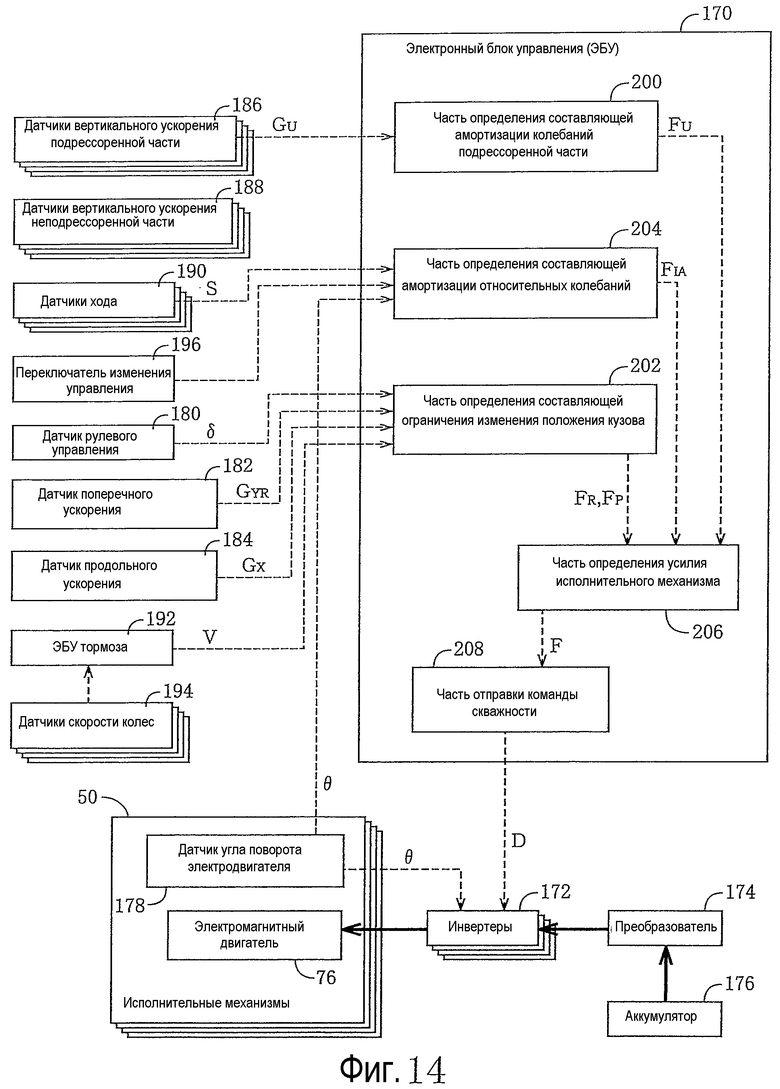
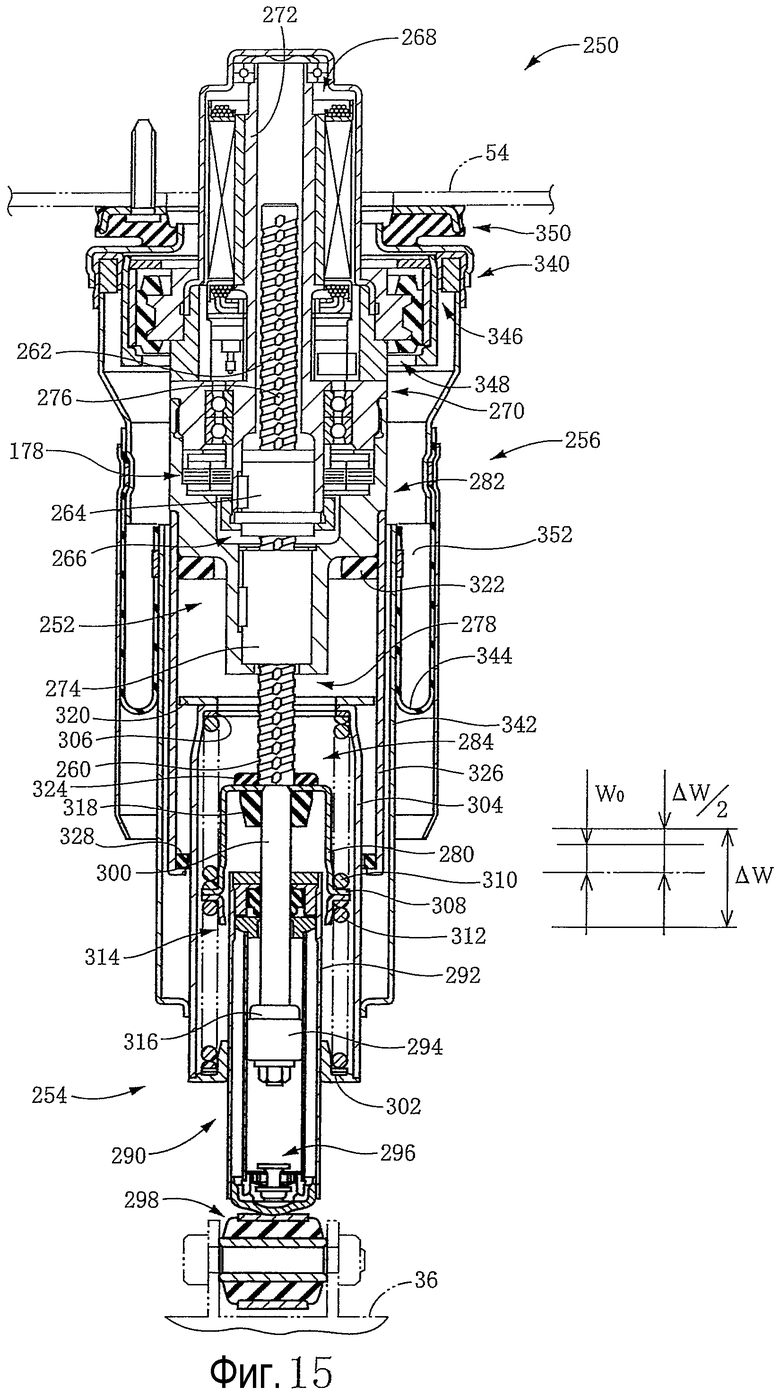
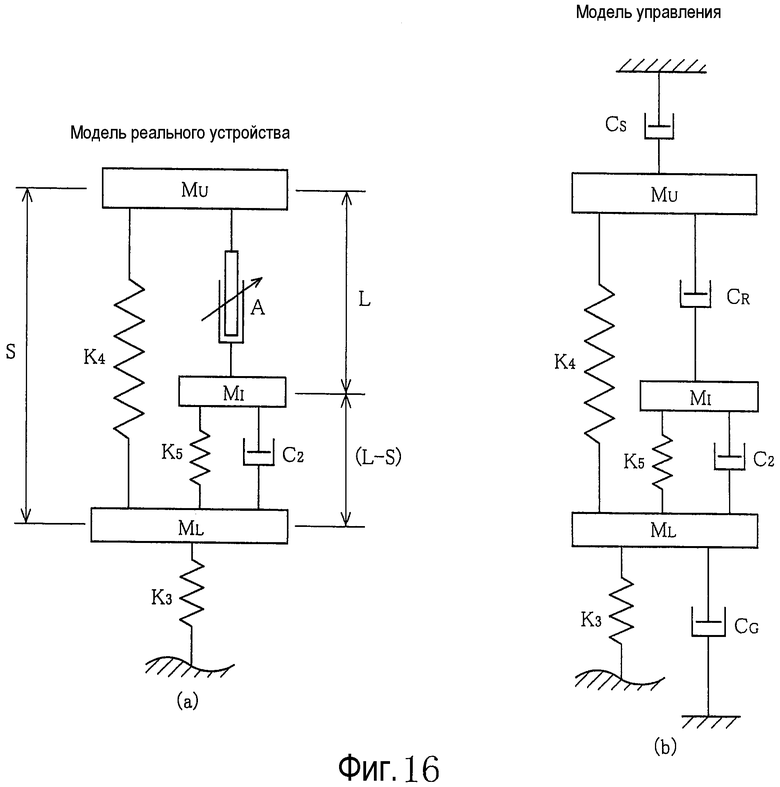
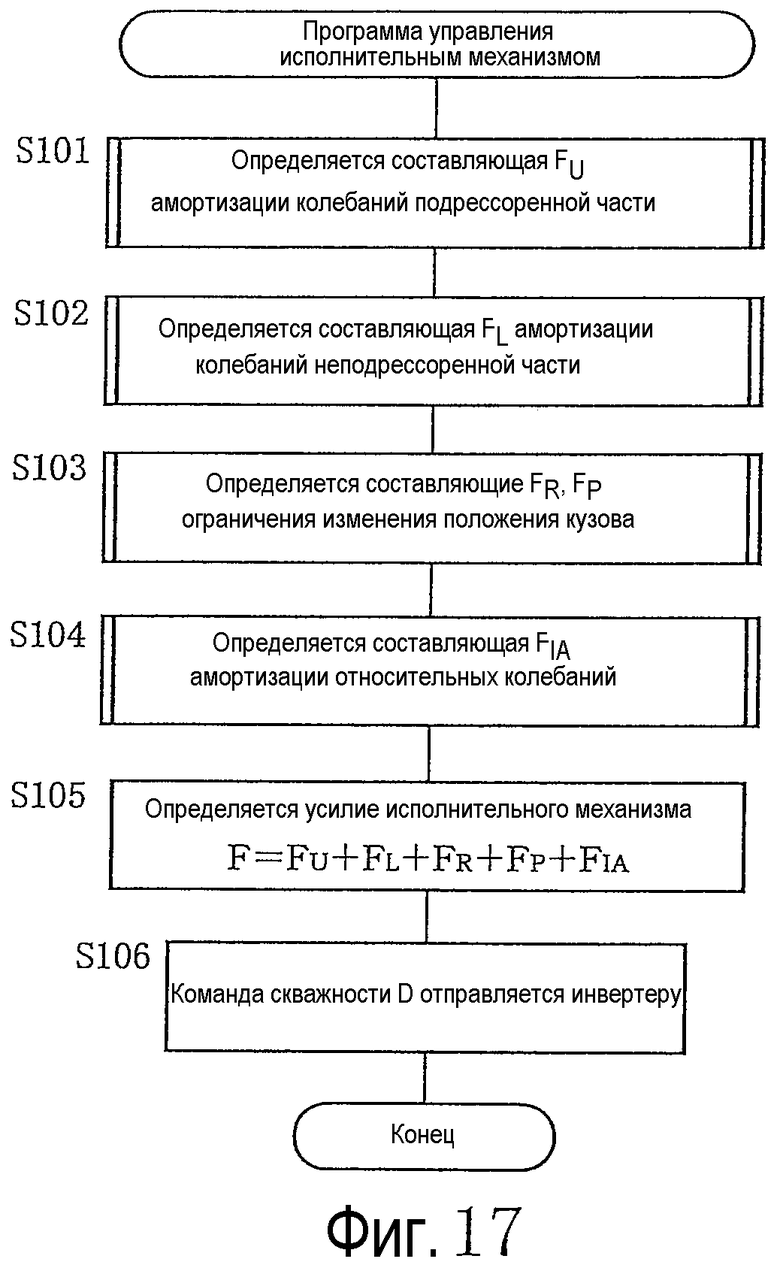
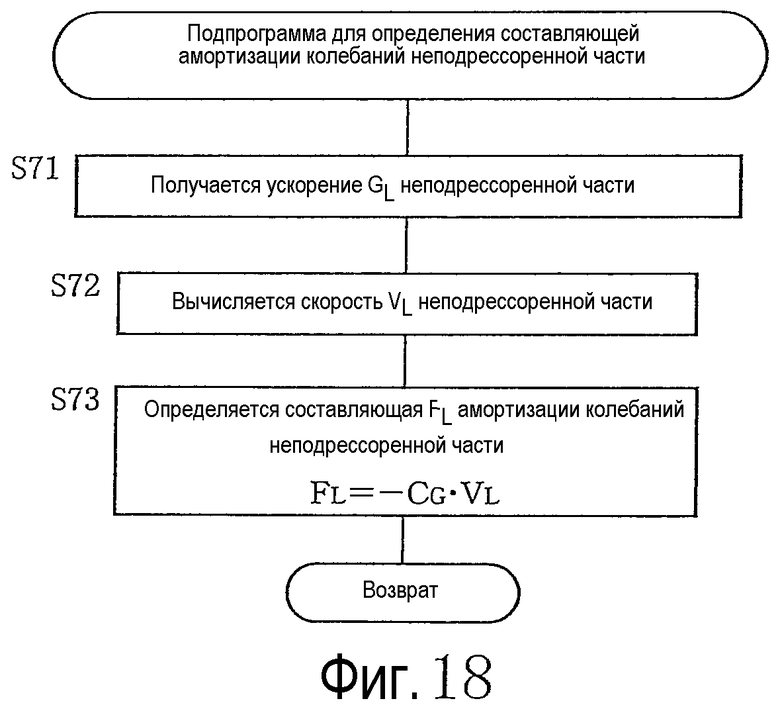

Изобретение относится к системе подвески транспортного средства, включающей в себя электромагнитный привод. Система подвески содержит электромагнитный исполнительный механизм, соединяющий механизм, контроллер. Электромагнитный исполнительный механизм содержит блок со стороны подрессоренной части, блок со стороны неподрессоренной части, винтовой механизм, электромагнитный двигатель. Соединяющий механизм включает в себя опорную пружину и выполнен с возможностью соединения плавающего блока и части поддержки плавающего блока друг с другом. Контроллер выполнен с возможностью управления усилием исполнительного механизма. Контроллер содержит часть управления амортизацией колебаний подрессоренной части и часть управления амортизацией относительных колебаний. Технический результат заключается в улучшении управляемости и повышении устойчивости транспортного средства. 14 з.п. ф-лы, 19 ил.
1. Система подвески для транспортного средства, содержащая электромагнитный исполнительный механизм (50; 252), включающий в себя: (А) блок (62, 72, 76, 78; 262, 268, 270, 274) со стороны подрессоренной части, поддерживаемый посредством подрессоренной части (54); (В) блок (60, 74, 82; 262, 268) со стороны неподрессоренной части, который поддерживается посредством неподрессоренной части (36) и который перемещается относительно блока со стороны подрессоренной части в связи с относительным перемещением подрессоренной части и неподрессоренной части по направлению друг к другу и друг от друга, (С) винтовой механизм (84; 266), включающий в себя шток (72; 262) с резьбой и резьбовую муфту (74; 264), которые свинчиваются друг с другом и одно из которых предусмотрено в блоке со стороны подрессоренной части, в то время как другое из которых предусмотрено в блоке со стороны неподрессоренной части, так что шток с резьбой и резьбовая муфта вращаются относительно друг друга в соответствии с относительным перемещением блока со стороны подрессоренной части и блока со стороны неподрессоренной части, (D) электромагнитный двигатель (76; 268), выполненный с возможностью передачи одному из штока с резьбой и резьбовой муфты усилия в отношении относительного вращения штока с резьбой и резьбовой муфты, причем исполнительный механизм выполнен с возможностью формирования на основе силы электромагнитного двигателя усилия исполнительного механизма, которое является усилием в отношении относительного перемещения блока со стороны подрессоренной части и блока со стороны неподрессоренной части, соединяющий механизм (64; 254), который включает в себя опорную пружину (48; 310, 312), чтобы обеспечивать возможность одному из блока со стороны подрессоренной части и блока со стороны неподрессоренной части поддерживаться плавающим образом в качестве плавающего блока с помощью части поддержки плавающего блока, которая является одной из подрессоренной части и неподрессоренной части, посредством которой поддерживается плавающий блок, причем соединяющий механизм выполнен с возможностью соединения вследствие упругости опорной пружины плавающего блока и части поддержки плавающего блока друг с другом, в то же время допуская их относительное перемещение, и контроллер (170), выполненный с возможностью управления усилием исполнительного механизма за счет управления работой электромагнитного двигателя, при этом контроллер включает в себя часть (200) управления амортизацией колебаний подрессоренной части, выполненную с возможностью осуществления управления амортизацией колебаний подрессоренной части для формирования в качестве составляющей усилия исполнительного механизма усилия, имеющего величину в соответствии со скоростью перемещения подрессоренной части, с тем, чтобы амортизировать колебания подрессоренной части, и часть (204) управления амортизацией относительных колебаний, выполненную с возможностью осуществления управления амортизацией относительных колебаний для формирования в качестве одной составляющей усилия исполнительного механизма усилия, имеющего величину в соответствии со скоростью относительного перемещения плавающего блока и части поддержки плавающего блока, с тем, чтобы амортизировать колебания плавающего блока, которые вызываются структурой, в которой плавающий блок плавающим образом поддерживается посредством опорной пружины.
2. Система по п.1, в которой часть управления амортизацией относительных колебаний выполнена с возможностью формирования усилия, имеющего величину в соответствии со скоростью относительного перемещения плавающего блока части поддержки плавающего блока, на основе скорости вращения электромагнитного двигателя и скорости относительного перемещения подрессоренной части и неподрессоренной части.
3. Система по п.1, в которой часть управления амортизацией относительных колебаний выполнена с возможностью осуществления в качестве управления амортизацией относительных колебаний управления для ограничения явления резонанса плавающего блока, которое вызывается структурой, в которой плавающий блок плавающим образом поддерживается посредством опорной пружины.
4. Система по п.1, в которой контроллер дополнительно включает в себя часть (370) управления амортизацией колебаний неподрессоренной части, выполнен с возможностью осуществления управления амортизацией колебаний неподрессоренной части для формирования в качестве одной составляющей усилия исполнительного механизма усилия, имеющего величину в соответствии со скоростью перемещения неподрессоренной части, для амортизации колебаний неподрессоренной части.
5. Система по п.1, в которой контроллер дополнительно включает в себя часть (202) управления ограничением изменения положения кузова, выполненную с возможностью выполнения для ограничения, по меньшей мере, одного из наклона относительно поперечной оси и наклона относительно продольной оси кузова транспортного средства, управления ограничением изменения положения кузова для формирования в качестве составляющей усилия исполнительного механизма, противодействующей силы против действующей силы, которая действует на кузов транспортного средства как причина, по меньшей мере, одного из наклона относительно поперечной оси и наклона относительно продольной оси, причем противодействующая сила имеет величину в соответствии с действующей силой.
6. Система по п.1, в которой опорная пружина сконфигурирована так, чтобы разрешать блоку со стороны неподрессоренной части поддерживаться плавающим образом в качестве плавающего блока посредством неподрессоренной части в качестве части поддержки плавающего блока, соединяющий механизм выполнен с возможностью соединения, вследствие упругости опорной пружины, блока со стороны неподрессоренной части и неподрессоренной части, в то же время допуская их относительное перемещение, и часть управления амортизацией относительных колебаний выполнена с возможностью осуществления, в качестве управления амортизацией относительных колебаний, управления для формирования усилия, имеющего величину в соответствии со скоростью относительного перемещения блока со стороны неподрессоренной части и неподрессоренной части, с тем, чтобы амортизировать колебания блока со стороны неподрессоренной части, которые вызываются структурой, в которой блок со стороны неподрессоренной части плавающим образом поддерживается посредством опорной пружины.
7. Система по п.1, содержащая основную пружину, соединяющую вследствие своей силы упругости подрессоренную часть и неподрессоренную часть.
8. Система по п.1, содержащая соединяющую пружину, соединяющую вследствие своей силы упругости плавающий блок и другую из подрессоренной части и неподрессоренной части, посредством которой другой из блока со стороны подрессоренной части и блока со стороны неподрессоренной части поддерживается.
9. Система по п.1, дополнительно содержащая гидравлический амортизатор (52), выполненный с возможностью формирования противодействующей силы против относительного перемещения подрессоренной части и неподрессоренной части.
10. Система по п.1, в которой соединяющий механизм включает в себя гидравлический амортизатор (290), выполненный с возможностью формирования противодействующей силы против относительного перемещения плавающего блока и части поддержки плавающего блока.
11. Система по п.1, в которой часть управления амортизацией относительных колебаний сконфигурирована так, чтобы выполнять управление амортизацией относительных колебаний только в ситуации, в которой составляющая интенсивности колебаний плавающего блока относительно конкретной частоты выше, чем пороговое значение.
12. Система по п.11, в которой часть управления амортизацией относительных колебаний сконфигурирована так, чтобы выполнять в качестве управления амортизацией относительных колебаний управление для ограничения явления резонанса плавающего блока, которое вызывается структурой, в которой плавающий блок плавающим образом поддерживается посредством опорной пружины, и сконфигурирована так, чтобы выполнять управление только в ситуации, в которой составляющая интенсивности колебаний плавающего блока относительно резонансной частоты в явлении резонанса в качестве конкретной частоты выше, чем пороговое значение.
13. Система по п.1, дополнительно содержащая механизм (150; 314) ограничения относительного смещения, выполненный с возможностью ограничения относительного смещения плавающего блока и части поддержки плавающего блока при их относительном перемещении.
14. Система по п.13, в которой часть управления амортизацией относительных колебаний сконфигурирована так, что коэффициент усиления системы управления, установленный для усилия, которое должно быть сформировано исполнительным механизмом при управлении амортизацией относительных колебаний, задан большим в случае, когда величина относительного смещения плавающего блока и части поддержки плавающего блока при их относительном перемещении превышает пороговое значение, чем в случае, когда величина относительного смещения не превышает пороговое значение.
15. Система по п.13, в которой часть управления амортизацией относительных колебаний сконфигурирована так, что коэффициент усиления системы управления, заданный для усилия, которое должно быть сформировано исполнительным механизмом при управлении амортизацией относительных колебаний, увеличивается с увеличением величины относительного смещения плавающего блока и части поддержки плавающего блока при их относительном перемещении.
| JP 2007203933 А, 16.08.2007 | |||
| ОБРАЗЦОВЫЙ КОНДЕНСАТОР | 0 |
|
SU270893A1 |
| Способ получения материала для теплового аккумулирования | 1973 |
|
SU539063A1 |
| АКТИВНАЯ ПОДВЕСКА КОРПУСА ТРАНСПОРТНОГО СРЕДСТВА | 2000 |
|
RU2203812C2 |

