ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к устройству и способу для управления состоянием транспортного средства.
УРОВЕНЬ ТЕХНИКИ
В качестве технологии, связанной с устройством управления транспортного средства, предложена такая технология, как технологии, описанные в Патентном документе 1. В частности, чтобы подавлять поведение подрессоренных масс, когда формируется поведение подрессоренных масс, состояние кузова транспортного средства стабилизируется посредством управления демпфирующей силой амортизатора с регулируемой демпфирующей силой.
ПАТЕНТНЫЕ ДОКУМЕНТЫ
Патентный документ: публикация заявки на патент Японии № Hei 7-117435 A.
ЗАДАЧИ, РЕШАЕМЫЕ ИЗОБРЕТЕНИЕМ
Тем не менее, в результате интенсивного исследования авторами настоящего изобретения было обнаружено, что даже если управление демпфирующей силой выполняется, положение транспортного средства не стабилизируется в достаточной степени в зависимости от диапазона скоростей хода.
Настоящее изобретение осуществлено с учетом проблемы, описанной выше, и направлено на создание устройства управления транспортного средства, которое может стабилизировать состояние или поведение транспортного средства независимо от диапазона скоростей хода.
СРЕДСТВО ДЛЯ РЕШЕНИЯ ЗАДАЧИ
Для решения указанной задачи, согласно настоящему изобретению, когда скорость хода амортизатора с регулируемой демпфирующей силой, который выполняет управление демпфирующей силой, чтобы подавлять поведение подрессоренных масс, равна или меньше заданного значения, степень насыщения области регулирования демпфирующей силы задается ниже степени насыщения, когда скорость хода превышает заданное значение, так что управление демпфирующей силой должно выполняться в пределах диапазона области регулирования демпфирующей силы, указываемой или предписанной в качестве заданной степени насыщения.
ПРЕИМУЩЕСТВО НАСТОЯЩЕГО ИЗОБРЕТЕНИЯ
Следовательно, когда скорость хода равна или меньше заданного значения, область регулирования демпфирующей силы сконфигурирована так, чтобы быть узкой, чтобы за счет этого ограничивать управление демпфирующей силой, чтобы подавлять необязательное управление демпфирующей силой, тогда как, когда скорость хода превышает заданное значение, область регулирования демпфирующей силы сконфигурирована так, чтобы быть широкой, чтобы выполнять управление демпфированием. Таким образом, состояние или поведение кузова транспортного средства могут быть стабилизированы в достаточной степени независимо от диапазона скоростей хода.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг. 1 является принципиальной схемой системы, иллюстрирующей устройство управления транспортного средства в первом варианте осуществления изобретения.
Фиг. 2 является блок-схемой управления, иллюстрирующей конфигурацию управления устройства управления транспортного средства в первом варианте осуществления изобретения.
Фиг. 3 является концептуальной схемой, иллюстрирующей конфигурацию систем управления с обратной связью для скорости вращения колес в первом варианте осуществления изобретения.
Фиг. 4 является блок-схемой управления, иллюстрирующей конфигурацию модуля оценки состояния движения первого варианта осуществления изобретения.
Фиг. 5 является блок-схемой управления, иллюстрирующей содержимое управления в модуле вычисления скорости хода.
Фиг. 6 является блок-схемой, иллюстрирующей конфигурацию модуля вычисления опорной скорости вращения колес.
Фиг. 7A и 7B являются принципиальными схемами, иллюстрирующими модель вибрации кузова транспортного средства; f.
Фиг. 8 является блок-схемой управления, иллюстрирующей управление продольным движением относительно поперечной оси при торможении первого варианта осуществления.
Фиг. 9 является схемой, иллюстрирующей частотную характеристику скорости вращения колес, определенную посредством датчика скорости вращения колес, по сравнению с частотной характеристикой хода датчика хода, не установленного в варианте осуществления.
Фиг. 10 является блок-схемой управления, иллюстрирующей частотно-чувствительное управление при управлении подавлением вибрации или демпфированием подрессоренной массы в первом варианте осуществления.
Фиг. 11 является схемой корреляции, иллюстрирующей характеристики ощущений человека в каждой из частотных областей.
Фиг. 12 является характеристической диаграммой, показывающей взаимосвязь между коэффициентом вхождения вибрации области ощущений мягкости и демпфирующей силой, полученной посредством частотно-чувствительного управления первого варианта осуществления.
Фиг. 13 является схемой, иллюстрирующей частотную характеристику скорости вращения колес, определенную посредством датчика скорости вращения колес в данном состоянии движения.
Фиг. 14 является блок-схемой управления, иллюстрирующей конфигурацию управления подавлением угловой скорости крена в первом варианте осуществления изобретения.
Фиг. 15 является временной диаграммой, иллюстрирующей процесс формирования формы сигнала огибающей при управлении подавлением угловой скорости крена в первом варианте осуществления изобретения.
Фиг. 16 является блок-схемой, иллюстрирующей конфигурацию управления для управления подавлением вибрации неподрессоренных масс или управления демпфированием первого варианта осуществления изобретения.
Фиг. 17 является блок-схемой управления, иллюстрирующей конфигурацию управления модуля управления демпфирующей силой в первом варианте осуществления изобретения.
Фиг. 18 является схемой, иллюстрирующей взаимосвязь между степенью насыщения и значением управляющего тока в S/A 3 в первом варианте осуществления изобретения.
Фиг. 19 является блок-схемой последовательности операций способа, показывающей процесс арбитража коэффициентов демпфирования в стандартном режиме в первом варианте осуществления изобретения.
Фиг. 20 является блок-схемой последовательности операций способа, показывающей процесс арбитража коэффициентов демпфирования в спортивном режиме в первом варианте осуществления изобретения.
Фиг. 21 является блок-схемой последовательности операций способа, показывающей процесс арбитража коэффициентов демпфирования в комфортном режиме в первом варианте осуществления изобретения.
Фиг. 22 является блок-схемой последовательности операций способа, показывающей процесс арбитража коэффициентов демпфирования в режиме движения по шоссе в первом варианте осуществления изобретения.
Фиг. 23 является временной диаграммой, показывающей изменение коэффициента демпфирования движения транспортного средства на волнистой дороге и ухабистой дороге.
Фиг. 24 является блок-схемой последовательности операций способа, показывающей процесс выбора режима, выполняемый посредством арбитражного модуля коэффициентов демпфирования, в первом варианте осуществления на основе состояний движения.
Фиг. 25 является характеристической диаграммой, иллюстрирующей взаимосвязь между управляющей силой и скоростью хода в первом варианте осуществления изобретения.
Фиг. 26 является характеристической диаграммой, иллюстрирующей усиление и амплитуду скорости хода относительно частоты скорости хода в традиционном транспортном средстве.
Фиг. 27 является картой ограничения степени насыщения в первом варианте осуществления изобретения.
Фиг. 28 является картой ограничения насыщения во втором варианте осуществления изобретения.
Фиг. 29 является блок-схемой управления, иллюстрирующей конфигурацию управления устройства управления во втором варианте осуществления изобретения.
Фиг. 30 является блок-схемой управления, иллюстрирующей процесс вычисления величины управления для каждого актуатора при выполнении управления продольным движением относительно поперечной оси во втором варианте осуществления изобретения.
ПЕРЕЧЕНЬ ССЫЛОЧНЫХ ПОЗИЦИЙ
1 - двигатель
1a - контроллер двигателя (модуль управления двигателем)
2 - модуль управления тормозом
2a - контроллер тормоза (модуль управления тормозом)
3 - S/A (амортизатор с регулируемой демпфирующей силой)
3a - S/A-контроллер
5 - датчик скорости вращения колес
6 - интегрированный датчик
7 - датчик угла поворота при рулении
8 - датчик скорости транспортного средства
20 - тормоз
31 - модуль управления входными воздействиями от водителя
32 - модуль оценки состояния движения
33 - модуль управления демпфированием подрессоренной массы
33a - модуль управления подвеской Skyhook
33b - модуль частотно-чувствительного управления
34 - модуль управления демпфированием неподрессоренной массы
35 - модуль управления демпфирующей силой
331 - модуль вычисления первой целевой величины управления стабилизацией состояния
332 - модуль вычисления величины управления стабилизацией состояния с использованием двигателя
333 - модуль вычисления второй целевой величины управления стабилизацией состояния
334 - модуль вычисления величины управления стабилизацией состояния с использованием тормоза
335 - модуль вычисления третьей целевой величины управления стабилизацией состояния
336 - модуль вычисления величины управления стабилизацией состояния с использованием амортизатора
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
ПЕРВЫЙ ВАРИАНТ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Фиг. 1 является принципиальной схемой системы, иллюстрирующей устройство управления транспортного средства в первом варианте осуществления изобретения. Транспортное средство имеет двигатель 1 в качестве источника мощности, тормоза 20, выполненные с возможностью формировать, для соответствующих колес, тормозной крутящий момент посредством силы трения (далее в этом документе, когда тормоза 20 нужно упомянуть по отдельности, они называются "тормозом 20FR переднего правого колеса", "тормозом 20FL переднего левого колеса", "тормозом 20RR заднего правого колеса" и "тормозом 20RL заднего левого колеса", соответственно), и амортизаторы 3 (S/A), расположенные между кузовом транспортного средства и соответствующими колесами и допускающие осуществление управления с использованием переменной демпфирующей силы (в дальнейшем в этом документе, когда амортизаторы 3 нужно упомянуть по отдельности, они называются "S/A 3FR переднего правого колеса", "S/A 3FL переднего левого колеса", "S/A 3RR заднего правого колеса" и "S/A 3RL заднего левого колеса, соответственно").
Двигатель 1 имеет контроллер 1a двигателя (соответствующий средству управления источником мощности, в дальнейшем в этом документе также называемому "модулем управления двигателем"), выполненный с возможностью управления крутящим моментом, который должен быть выведен из двигателя 1. Контроллер 1a двигателя управляет рабочими режимами двигателя 1 (например, частотой вращения двигателя и выходным крутящим моментом двигателя) требуемым образом посредством управления позицией дроссельного клапана, объемом расхода топлива, распределением зажигания и т.п. двигателя 1. Дополнительно, тормоза 20 формируют тормозной крутящий момент на основе гидравлического давления, поданного посредством модуля 2 управления тормозом, допускающего управление давлением тормозной жидкости для каждого колеса согласно состояниям движения. Модуль 2 управления тормозом имеет контроллер 2a тормоза (также называемый "модулем управления тормозом"), выполненный с возможностью управления тормозным крутящим моментом, сформированным посредством тормозов 20. Контроллер 2a тормоза формирует требуемое гидравлическое давление для тормозов 20 соответствующих колес через операции открытия и закрытия нескольких электромагнитных клапанов, с использованием давления в главном цилиндре, сформированного посредством нажатия тормоза водителем, или давления насоса, сформированного посредством включенного насоса с приводом от электромотора в качестве источника гидравлического давления.
S/A 3 является устройством формирования демпфирующей силы, выполненным с возможностью демпфирования упругого перемещения спиральной пружины, расположенной между неподрессоренной массой (например, осями и колесами) и подрессоренной массой (например, кузовом транспортного средства) транспортного средства. S/A 3 выполнен с возможностью изменения демпфирующей силы посредством операций актуаторов. S/A 3 имеет цилиндр, в который вводится или заполняется текучая среда, поршень, который ходит в цилиндре, и отверстие, управляющее перемещением текучей среды между верхней и нижней камерами для текучей среды, сформированными выше и ниже поршня, соответственно. Поршень имеет несколько отверстий, имеющих различные размеры отверстия, и надлежащее отверстие в соответствии с принимаемой управляющей инструкцией выбирается из нескольких отверстий, когда S/A 3 активируется. Таким образом, может формироваться демпфирующая сила согласно размеру выбранного отверстия. Например, когда выбранный размер отверстия является небольшим, движение поршня ограничивается в большей степени, чтобы задавать большой демпфирующую силу; когда размер отверстия является большим, движение поршня ограничивается в меньшей степени, с тем чтобы задавать небольшой демпфирующую силу.
Следует отметить, что способ изменения демпфирующей силы не ограничивается выбором размера отверстия. Альтернативно, например, демпфирующая сила может быть изменена посредством управления позицией открытия электромагнитного регулирующего клапана, расположенного в соединительном канале, сформированном между верхней стороной и нижней стороной поршня, чтобы давать возможность обмена текучей средой. S/A 3 имеет S/A-контроллер 3a (средство управления демпфирующей силой), выполненный с возможностью управления демпфирующей силой каждого S/A 3 посредством операции размера отверстия S/A 3.
Транспортное средство также имеет датчики 5 скорости вращения колес, выполненные с возможностью определения скорости вращения колес соответствующего колеса (в дальнейшем в этом документе, когда имеется в виду скорость вращения колес, соответствующая отдельному колесу, выполняется упоминание скорости вращения правого переднего колеса: 5FR, скорости вращения левого переднего колеса: 5FL, скорости вращения правого заднего колеса: 5RR, и скорости вращения левого заднего колеса: 5RL), интегрированный датчик 6, выполненный с возможностью определения продольного ускорения, скорости относительно вертикальной оси и поперечного ускорения, действующего на центр тяжести транспортного средства, датчик 7 угла поворота при рулении, выполненный с возможностью определения угла поворота при рулении, который указывает величину руления, введенную водителем, датчик 8 скорости транспортного средства, выполненный с возможностью определения скорости транспортного средства, датчик 9 крутящего момента двигателя, выполненный с возможностью определения крутящего момента двигателя, датчик 10 частоты вращения двигателя, выполненный с возможностью определения частоты вращения двигателя, датчик 11 давления в главном цилиндре, выполненный с возможностью определения давления в главном цилиндре, тормозной переключатель 12, выполненный с возможностью выведения сигнала включенного состояния, когда нажимается педаль тормоза, и датчик 13 позиции акселератора, выполненный с возможностью определения позиции педали акселератора. Сигналы из этих различных датчиков вводятся в контроллер 1a двигателя, контроллер 2a тормоза и S/A-контроллер 3a при необходимости. Следует отметить, что местоположение интегрированного датчика 6 не ограничивается центром тяжести транспортного средства и может быть расположено в любой другой позиции при условии, что интегрированный датчик 6 может оценивать различные значения в центре тяжести. Помимо этого, интегрированный датчик 6 не должен быть интегрирован, и скорость относительно вертикальной оси, продольное ускорение и поперечное ускорение могут определяться по отдельности или индивидуально.
ОБЩАЯ КОНФИГУРАЦИЯ УСТРОЙСТВА УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА
В устройстве управления транспортного средства в первом варианте осуществления, три актуатора используются для того, чтобы управлять вибрациями, сформированными в подрессоренной массе. При этом управлении вибрацией, операции управления состоянием подрессоренной массы, выполняемые посредством этих актуаторов, мешают друг другу. Помимо этого, поскольку элемент, управляемый посредством двигателя 1, элемент, управляемый посредством тормоза 20, и элемент, управляемый посредством S/A 3, отличаются друг от друга, существует проблема касательно того, как эти элементы должны быть комбинированы для управления.
Например, тормоз 20 может управлять вертикальным колебательным движением и продольным движением относительно поперечной оси, но одновременное управление обоими из этих движений зачастую приводит к тому, что водитель испытывает ощущение сильного замедления и в силу этого дискомфорт. S/A 3 может управлять всем движением по крену, вертикальным колебательным движением и продольным движением относительно поперечной оси. Тем не менее, если S/A 3 выполняет широкодиапазонное управление для этих движений, затраты на изготовление S/A 3 возрастают. Кроме того, имеется тенденция к формированию большой демпфирующей силы, что приводит к вероятности ввода высокочастотных вибраций от поверхности дороги. Это также вызывает дискомфорт у водителя. Другими словами, предусмотрена следующая компромиссная взаимосвязь. Управление посредством тормоза 20 не ухудшает характеристики высокочастотной вибрации, но увеличивает ощущение замедления, тогда как управление посредством S/A 3 не увеличивает ощущение замедления, но приводит к вводу высокочастотных вибраций.
Следовательно, эти проблемы оцениваются всесторонне, так что устройство управления транспортного средства по первому варианту осуществления может достигать конфигурации управления, которая использует преимущества соответствующих актуаторов в рабочих характеристиках управления и одновременно компенсирует их недостатки. Чтобы реализовывать такое устройство управления транспортного средства, которое имеет превосходную демпфирующую способность, но при этом может быть изготовлено экономически эффективно, система общего управления сконструирована с учетом, главным образом, следующих аспектов.
(1) Подавление величины управления посредством S/A 3 посредством параллельного выполнения операций управления посредством двигателя 1 и тормоза 20.
(2) Разрешение ощущения замедления, вызываемого посредством управления через тормоз 20, посредством ограничения регулируемого перемещения объекта посредством тормоза 20 только продольным движением относительно поперечной оси.
(3) Вывод ограниченным образом величин управления от двигателя 1 и тормоза 20, а не фактически доступных, с тем чтобы уменьшать дискомфорт, вызываемый через них, при уменьшении нагрузки на S/A 3.
(4) Выполнение управления подвеской Skyhook посредством каждого актуатора. В это время, без использования датчика хода, датчика подрессоренных или неподрессоренных масс и т.п., которые, в общем, требуются для управления подвеской Skyhook, посредством использования датчика скорости вращения колес, установленного в каждом транспортном средстве, управление подвеской Skyhook выполняется с использованием датчика скорости вращения колес, установленного в каждом транспортном средстве, чтобы осуществлять управление подвеской Skyhook при менее дорогой конфигурации.
(5) При выполнении управления подрессоренной массой посредством S/A 3, ввод скалярного управления (частотно-чувствительного управления) для того, чтобы обрабатывать ввод высокочастотных вибраций, с которым затруднительно справляться посредством векторного управления, например, управления подвеской Skyhook.
(6) Предоставление надлежащего режима управления в соответствии с состояниями движения посредством надлежащего выбора режима управления, осуществляемого посредством S/A 3 согласно состояниям движения
Это общее представление системы общего управления, сконфигурированной в варианте осуществления. Ниже описываются отдельные подробности для осуществления означенных аспектов.
Фиг. 2 является блок-схемой управления, иллюстрирующей конфигурацию управления устройства управления транспортного средства в первом варианте осуществления. Устройство управления транспортного средства в первом варианте осуществления состоит из трех контроллеров, т.е. из контроллера 1a двигателя, контроллера 2a тормоза и S/A-контроллера 3a. Каждый из этих контроллеров составляет систему управления с обратной связью на основе скорости вращения колес.
Хотя конфигурация первого варианта осуществления имеет три контроллера, настоящее изобретение не ограничено конкретным образом. Например, эти контроллеры могут быть интегрированы в один контроллер. Конфигурация первого варианта осуществления имеет три контроллера, поскольку предполагается, что устройство управления транспортного средства согласно первому варианту осуществления может быть реализовано посредством использования существующего контроллера двигателя и контроллера тормоза, чтобы формировать модуль 1a управления двигателем и модуль 2b управления тормозом, соответственно, и посредством дополнительной установки S/A-контроллера 3a, чтобы за счет этого осуществлять управление транспортным средством в первом варианте осуществления.
КОНФИГУРАЦИЯ КОНТРОЛЛЕРА ДВИГАТЕЛЯ
Контроллер 1a двигателя имеет первый модуль 100 оценки состояния движения, выполненный с возможностью оценивания скорости хода каждого колеса, угловой скорости вертикального колебательного движения, угловой скорости крена и угловой скорости продольного движения относительно поперечной оси, используемые для управления подвеской по принципу Skyhook для модуля 101a управления подавлением вибрации подрессоренной массы, описанного ниже, главным образом, на основе скорости вращения колес, определенной посредством датчика скорости вращения колес, модуль 101 управления стабилизацией состояния или поведением с использованием двигателя, выполненный с возможностью вычислять величину управления стабилизацией состояния с использованием двигателя, представляющую инструкцию управления крутящим моментом двигателя, и модуль 102 управления двигателем, выполненный с возможностью управления рабочим режимом двигателя 1 на основе вычисленной величины управления стабилизацией состояния с использованием двигателя. Следует отметить, что процесс оценки первого модуля оценки состояния движения подробно описывается далее.
Модуль 101 управления стабилизацией состояния с использованием двигателя включает в себя модуль 101a управления подавлением вибрации или демпфированием подрессоренной массы, выполненный с возможностью вычислять величину управления подрессоренной массы для подавления вертикального колебательного движения и продольного движения относительно поперечной оси посредством управления подвеской Skyhook, модуль 101b управления нагрузкой транспортного средства, выполненный с возможностью вычислять величину управления для подавления флуктуаций нагрузки транспортного средства между передними колесами и задними колесами, и модуль 101c управления входными воздействиями от водителя на стороне двигателя, выполненный с возможностью вычислять величину управления откликом относительно вертикальной оси, подходящую для поведения транспортного средства, достижения которого хочет водитель, на основе сигналов из таких датчиков, как датчик 7 угла поворота при рулении и датчик 8 скорости транспортного средства. Модуль 101 управления стабилизацией состояния с использованием двигателя вычисляет посредством оптимального управления (LQR) величину управления стабилизацией состояния с использованием двигателя, которая является минимальной величиной управления из величин управления, вычисленных посредством этих модулей управления, и выводит конечную величину управления стабилизацией состояния с использованием двигателя в контроллер 102 двигателя. Поскольку двигатель 1 подавляет вертикальное колебательное движение и продольное движение относительно поперечной оси таким способом, может уменьшаться величина управления демпфирующей силой посредством S/A 3, что способствует недопущению ухудшения характеристик подавления высокочастотной вибрации. Дополнительно, поскольку S/A 3 может фокусироваться на подавлении движения по крену, может эффективно подавляться движение по крену.
КОНФИГУРАЦИЯ КОНТРОЛЛЕРА ТОРМОЗА
Контроллер 2a тормоза включает в себя второй модуль 200 оценки состояния движения, выполненный с возможностью оценивать скорость хода каждого колеса, угловую скорость продольного движения относительно поперечной оси и т.п. на основе скорости вращения колес, определенной посредством датчика 5 скорости вращения колес, модуль 201 управления подвеской Skyhook (который подробно описывается ниже), выполненный с возможностью вычислять величину управления стабилизацией состояния с использованием тормоза на основе управления подвеской Skyhook, которое, в свою очередь, основано на оцененной скорости хода и угловой скорости продольного движения относительно поперечной оси, и модуль 202 управления тормозом, выполненный с возможностью управления тормозным крутящим моментом каждого тормоза 20 на основе вычисленной величины управления стабилизацией состояния с использованием тормоза. Следует отметить, что в первом варианте осуществления, приспосабливается процесс оценки, идентичный процессу оценки для первого модуля 100 оценки состояния движения и второго модуля 200 оценки состояния движения. Тем не менее, другой способ оценки может использоваться, когда процесс проводится на основе скорости вращения колес. Таким образом, поскольку тормоза 20 подавляют продольное движение относительно поперечной оси, может уменьшаться величина управления демпфирующей силой посредством S/A 3, что может способствовать недопущению ухудшения характеристик подавления высокочастотной вибрации. Дополнительно, поскольку S/A 3 может фокусироваться на подавлении движения по крену, может эффективно подавляться движение по крену.
КОНФИГУРАЦИЯ S/A-КОНТРОЛЛЕРА
S/A-контроллер 3a включает в себя модуль 31 управления входными воздействиями от водителя, выполненный с возможностью осуществлять управление входными воздействиями от водителя для достижения требуемой стабилизации состояния транспортного средства на основе операций водителя (например, операции руления, операции нажатия педали акселератора и операции нажатия педали тормоза), третий модуль 32 оценки состояния движения, выполненный с возможностью оценивать состояния движения на основе значений определения различных датчиков (главным образом, значения датчика скорости вращения колес из датчика 5 скорости вращения колес), модуль 33 управления демпфированием подрессоренной массы, выполненный с возможностью управления вибрациями подрессоренной массы на основе оцененных состояний движения, модуль 34 управления демпфированием неподрессоренной массы, выполненный с возможностью управления вибрациями неподрессоренной массы на основе оцененных состояний движения, и модуль 35 управления демпфирующей силой, выполненный с возможностью управления демпфирующей силой для S/A 3 посредством определения демпфирующей силы, которая должна быть задана для S/A 3, на основе: величины управления стабилизацией состояния с использованием амортизатора, выводимой из модуля 31 управления входными воздействиями от водителя, величины управления подавлением вибрации подрессоренной массы, выводимой из модуля 33 управления демпфированием или подавлением вибрации подрессоренной массы, и величины управления подавлением вибрации неподрессоренной массы, выводимой из модуля 34 управления демпфированием неподрессоренной массы.
В первом варианте осуществления, как описано выше, используется способ оценки, идентичный процессу оценки в первом модуле оценки состояния движения 100, втором модуле 200 оценки состояния движения и третьем модулем 32 оценки состояния движения, при условии, что процесс оценки выполняется на основе скорости вращения колес, другой процесс оценки может использоваться без конкретного ограничения.
Следует отметить, что, в варианте 1 осуществления, во всех актуаторах создается система управления с обратной связью с использованием датчика 5 скорости вращения колес. Фиг. 3 является концептуальной схемой, иллюстрирующей конфигурации систем управления скоростью вращения колес с обратной связью варианта 1 осуществления. Двигатель 1, тормоза 20 и S/A 3 составляют по отдельности систему управления двигателем с обратной связью, систему управления тормоза с обратной связью и систему управления S/A с обратной связью. Когда, в это время, если каждый актуатор управляется по отдельности без взаимного мониторинга актуатора, должна возникать проблема управления помехами. Тем не менее, влияние вследствие управления каждым актуатором должно отражаться во флуктуациях или изменениях в скорости вращения колес.
Тем не менее, влияние на каждый актуатор посредством других актуаторов проявляется в скорости хода. Таким образом, конфигурирование систем управления с обратной связью на основе скорости хода приводит к отслеживанию их влияния друг на друга и, следовательно, избегает помех управления. Например, если определенные вибрации подрессоренной массы подавляются посредством двигателя 1, в силу этого возникают варьирования или флуктуации в скорости вращения колес. Таким образом, даже если другие актуаторы, а именно тормоза 20 и S/A 3, не воспринимают содержимое управления, выполняемого посредством двигателя 1, тормоза 20 и S/A 3 должны управляться на основе скорости вращения колес, отражающей влияние. Другими словами, поскольку системы управления с обратной связью создаются с использованием скорости вращения колес в качестве общих значений, даже при отдельном управлении без отслеживания управления друг друга, в результате управление выполняется так, как если бы они отслеживались (это управление упоминается в качестве совместного управления ниже). Таким образом, стабилизация состояния транспортного средства может сводиться в стабилизированном направлении. Ниже приводится описание каждой системы управления с обратной связью по порядку.
МОДУЛЬ ОЦЕНКИ СОСТОЯНИЯ ДВИЖЕНИЯ
Во-первых, приводится описание первого, второго и третьего модулей оценки состояния движения, содержащих каждую систему управления с обратной связью в качестве общей составляющей или элемента. В варианте 1 осуществления приспосабливается процесс оценки, идентичный процессу оценки в первом модуле 100 оценки состояния движения, втором модуле 200 оценки движения и третьем модуле 32 оценки состояния движения. Таким образом, поскольку процесс каждого модуля оценки является общим, процесс оценки в третьем модуле 32 оценки состояния движения описывается как типичный.
Следует отметить, что эти модули оценки состояния движения могут включать в себя модели оценки, отличающиеся друг от друга, и не ограничены при условии, что оценка состояния выполняется с использованием скорости вращения колес.
Фиг. 4 является блок-схемой управления, иллюстрирующей конфигурацию третьего модуля 32 оценки состояния движения варианта 1 осуществления. В модуле 32 оценки состояния движения в варианте 1 осуществления, по существу на основе скорости вращения колес, определенной посредством датчика 5 скорости вращения колес, скорость хода каждого колеса, угловая скорость вертикального колебательного движения, угловая скорость крена и угловая скорость продольного движения относительно поперечной оси вычисляются для использования при управлении подвеской Skyhook модуля 33 управления демпфированием неподрессоренной массы, описанного ниже. Сначала значения датчиков скорости транспортного средства, 5 из соответствующих колес вводятся в модуль 321 вычисления скорости хода, и скорость подрессоренной массы вычисляется из скоростей хода соответствующих колес, вычисленных в модуле 321 вычисления скорости хода.
Фиг. 5 является блок-схемой управления, показывающей содержимое управления модуля вычисления скорости хода в первом варианте осуществления. Модуль 321 вычисления скорости хода предоставляется отдельно для каждого колеса, и блок-схема управления, показанная на фиг. 5, является блок-схемой управления, сфокусированной на конкретном колесе. В модуле 321 вычисления скорости хода предоставляется модуль 300 вычисления опорной скорости вращения колес, который вычисляет опорную скорость вращения колес на основе значений датчика 5 скорости вращения колес, угла δf поворота при рулении для передних колес, определенного посредством датчика 7 угла поворота при рулении, угла δr поворота при рулении для задних колес (для случая, в котором предоставляется устройство рулевого управления для задних колес, в противном случае надлежащим образом используется нуль), поперечной скорости кузова транспортного средства и фактической угловой скорости относительно вертикальной оси, определенных посредством интегрированного датчика 6. Кроме того, модуль 321a вычисления частоты вибрации при вращении шин, который вычисляет частоту вибрации при вращении шин на основе вычисленной опорной скорости вращения колес, модуль 321b вычисления отклонения, который вычисляет отклонение (флуктуацию скорости вращения колес) между опорной скоростью вращения колес и значением датчика скорости транспортного средства, и модуль 321c GEO-преобразования, который преобразует в величину хода подвески из отклонения, вычисленного посредством модуля 321b вычисления отклонения, и модуль 321d калибровки скорости хода, который калибрует из преобразованной величины хода в скорость хода, и процессор 321e сигналов, который вычисляет конечную скорость хода посредством применения полосового режекторного фильтра в соответствии с частотой, вычисленной посредством модуля 321a вычисления частоты вибрации при вращении шин, к значению, калиброванному посредством модуля 321d калибровки скорости хода, чтобы удалять компонент вибрации первого порядка при вращении шин.
МОДУЛЬ ВЫЧИСЛЕНИЯ ОПОРНОЙ СКОРОСТИ ВРАЩЕНИЯ КОЛЕС
Далее приводится описание модуля 300 вычисления опорной скорости вращения колес. Фиг. 6 является блок-схемой, иллюстрирующей конфигурацию модуля вычисления опорной скорости вращения колес в первом варианте осуществления. Опорная скорость вращения колес означает, из скоростей вращения колес, значение, в котором удалены различные возмущения. Другими словами, отклонение между значением датчика скорости вращения колес и опорной скоростью вращения колес является значением, которое связано с компонентом, который варьируется согласно вертикальному колебательному поведению, поведению при крене и продольному поведению кузова транспортного средства либо ходу, сформированному посредством вертикальных вибраций неподрессоренных масс. В настоящем варианте осуществления, скорость хода оценивается на основе этого отклонения.
В модуле 301 извлечения компонента плоского движения, первая скорость V0 вращения колес в качестве опорной скорости вращения колес каждого колеса вычисляется на основе модели вида сверху кузова транспортного средства, принимающей значение датчика скорости вращения колес в качестве ввода. Здесь, при условии, что значение датчика скорости вращения колес, определенное посредством датчика 5 скорости вращения колес, представляет собой ω (рад/с), фактический угол поворота при рулении для передних колес, определенный посредством датчика 7 угла поворота при рулении, представляет собой δf (рад), фактический угол поворота при рулении для задних колес, представляет собой δr (рад), поперечная скорость кузова транспортного средства представляет собой Vx, скорость относительно вертикальной оси, определенная посредством интегрированного датчика 6, представляет собой γ (рад/с), скорость кузова транспортного средства, оцененная из опорной скорости ω0 вращения колес (рад/с), которая вычислена, представляет собой V (м/с), опорные скорости вращения колес, которые должны быть вычислены, представляют собой VFL, VFR, VRL, VRR, след переднего колеса представляет собой Tf, след заднего колеса представляет собой Tr, расстояние между позицией силы тяжести транспортного средства и передним колесом представляет собой Lf и расстояние между позицией силы тяжести транспортного средства и задним колесом представляет собой Lr, соответственно, модель вида сверху кузова транспортного средства может выражаться следующим образом:
Уравнение (1)
VFL=(V-Tf/2·γ)cosδf+(Vx+Lf·γ)sinδf
VFR=(V+Tf/2·γ)cosδf+(Vx+Lf·γ)sinδf
VRL=(V-Tr/2·γ)cosδr+(Vx-Lr·γ)sinδr
VRR=(V+Tr/2·γ)cosδr+(Vx-Lr·γ)sinδr
Помимо этого, при условии нормального времени движения, при котором не возникает скольжения в транспортном средстве, в качестве поперечной скорости Vx транспортного средства может вводиться нуль. При перезаписи этих уравнений посредством задания V в качестве опорного значения, они могут выражаться следующим образом. При перезаписи, V описывается для каждого колеса в качестве V0FL, V0FR, V0RL и V0RR (согласно первой скорости вращения колес):
Уравнение (2)
V0FL={VFL-Lf·γsinδf}/cosδf+Tf/2·γ
V0FR={VFR-Lf·γsinδf}/cosδf-Tf/2·γ
V0RL={VRL+Lr·γsinδr}/cosδr+Tr/2·γ
V0RR={VRR+Lf·γsinδf}/cosδr-Tr/2·γ
В модуле 302 исключения возмущений при крене, вторая скорость V0F, V0R вращения колес представляет опорную скорость вращения колес передних и задних колес на основе модели вида спереди транспортного средства, принимающей первую скорость V0 вращения колес в качестве ввода. Модель вида спереди транспортного средства служит для того, чтобы удалять разность скорости вращения колес, которая возникает вследствие возникновения движения по крену, при просмотре спереди транспортного средства, вокруг вертикальной линии, причем центр вращения по крену проходит через центр тяжести транспортного средства, и может выражаться посредством следующего уравнения:
V0F=(V0FL+V0FR)/2
V0R=(V0RL+V0RR)/2
Таким образом, может получаться вторая скорость V0F, V0R вращения колес с удалением возмущений вследствие движения по крену.
В модуле 303 исключения возмущений при продольном движении относительно поперечной оси третьи скорости VbFL, VbFR, VbRL и VbRR вращения колес вычисляются на основе модели вида сбоку кузова транспортного средства, принимающей вторые скорости V0F, V0R вращения колес в качестве ввода. Здесь, модель вида сбоку кузова транспортного средства служит для того, чтобы исключать разность скорости вращения колес вследствие продольного движения относительно поперечной оси, сформированного вокруг вертикальной линии, причем продольное вращение проходит через центр тяжести транспортного средства, и может выражаться посредством следующих уравнений.
Уравнение 3
VbFL=VbFR=VbRL=VbRR={Lr/(Lf+Lr)}V0F+{Lf/(Lf+Lr)}V0R
В модуле 304 перераспределения опорной скорости вращения колес опорная скорость ω0 вращения колес вычисляется посредством назначения сначала V, VbFL (=VbFR=VbRL=VbRR) в модели вида сверху кузова транспортного средства, показанной посредством уравнения 1, чтобы получать конечные опорные скорости VRL, VFR, VRL и VRR вращения колес, после чего выполняется деление на радиус r0 шины, соответственно.
Как описано выше, как только вычислена опорная скорость ω0 вращения колес для каждого колеса, вычисляется отклонение опорной скорости ω0 вращения колес и значение датчика скорости вращения колес. Поскольку это отклонение представляет флуктуации скорости вращения колес, ассоциированные с ходом подвески, оно может быть преобразовано в скорость Vz_s хода. По существу, чтобы удерживать соответствующие колеса, не только подвески подвергаются вертикальному ходу, но и центры вращения колес перемещаются продольно вместе с ходом, и сама ось, установленная вместе с датчиком 5 скорости вращения колес, имеет наклон, чтобы за счет этого формировать разность угла поворота. В силу этого продольного перемещения, скорость вращения колес изменяется так, что отклонение между опорной скоростью вращения колес и значением датчика скорости вращения колес может быть извлечено в качестве флуктуаций, ассоциированных с этим ходом. Следует отметить, что степень флуктуаций может задаваться надлежащим образом в зависимости от варьирований геометрии подвески.
В модуле 321 вычисления скорости хода вычислена каждая из скоростей Vz_sFL, Vz_sFR, Vz_sRL и Vz_sRR хода для соответствующих колес; угловая скорость вертикального колебательного движения, угловая скорость крена и угловая скорость продольного движения относительно поперечной оси для управления подвеской Skyhook вычисляются в модуле 322 вычисления скорости подрессоренной массы.
МОДЕЛЬ ОЦЕНКИ
При управлении подвеской Skyhook стабилизация состояния подрессоренной массы управляется с использованием демпфирующей силы, которая задается на основе взаимосвязи между скоростью хода S/A 3 и скоростью подрессоренной массы, чтобы достигать плоской или горизонтальной стабилизации состояния движущегося транспортного средства. Для того, чтобы осуществлять управление стабилизации состояния подрессоренной массы через управление подвеской Skyhook, должна быть реализована обратная связь по скорости подрессоренной массы. Здесь, поскольку определимое значение из датчика 5 скорости вращения колес представляет собой скорость хода, и датчик вертикального ускорения и т.п. отдельно не предоставляется на подрессоренной массе, необходимо оценивать скорость подрессоренной массы с использованием модели оценки. Ниже приводится описание проблем, связанных с моделью оценки, а также конфигурация, которая должна приспосабливаться посредством модели оценки.
Фиг. 7A, 7B являются принципиальными схемами, иллюстрирующими модель вибрации кузова транспортного средства, фиг. 7A показывает модель для транспортного средства с S/A с постоянной демпфирующей силой (называемого "традиционным транспортным средством" ниже), тогда как фиг. 7B показывает модель для транспортного средства, которое выполняет управление подвеской Skyhook с S/A, допускающим варьирование демпфирующей силы. На фиг. 7A и 7B, Ms обозначает весовой коэффициент подрессоренной массы, Mu обозначает весовой коэффициент неподрессоренной массы, Ks обозначает коэффициент упругости спиральной пружины, Cs обозначает коэффициент демпфирования S/A, Ku обозначает коэффициент упругости неподрессоренной массы (шины), Cu обозначает коэффициент демпфирования неподрессоренной массы (шины), и Cv обозначает переменный коэффициент демпфирования. Помимо этого, z2 обозначает позицию подрессоренной массы, z1 обозначает позицию неподрессоренной массы, и z0 обозначает позицию поверхности дороги, соответственно.
Когда используется модель для традиционного транспортного средства, показанного на фиг. 7A, уравнение движения подрессоренной массы выражается следующим образом, где дифференциал первого порядка (т.е. скорость) z1 обозначается посредством dz1, а дифференциал второго порядка (т.е. ускорение) z1 обозначается посредством ddz1, соответственно:
Уравнение 1 оценки
Ms·ddz2=-Ks(z2-z1)-Cs(dz2-dz1)
Это выражение отношения организуется с использованием преобразования Лапласа следующим образом:
Уравнение 2 оценки
dz2=-(1/Ms)·(1/s2)·(Cs·s+Ks)(dz2-dz1)
Поскольку dz2-dz1 представляет скорости Vz_sFL, Vz_sFR, Vz_sRL и Vz_sRR хода, скорость подрессоренной массы может быть вычислена из скоростей хода. Тем не менее, при изменении демпфирующей силы с использованием управления подвеской Skyhook, точность оценки значительно снижается. Поэтому модель для традиционного транспортного средства имеет проблему неспособности предоставлять большую абсолютную величину силы управления стабилизацией состояния (чтобы изменять демпфирующую силу).
Чтобы разрешать такую проблему, есть возможность использовать модель транспортного средства, показанную на фиг. 7B, которая основана на управлении подвеской Skyhook. По существу, изменение демпфирующей силы заключает в себе изменение силы, ограничивающей скорость перемещения поршня S/A 3 в соответствии с ходами подвески. Поскольку S/A 3, используемый здесь, имеет полуактивный тип, что означает то, что его поршень не может быть перемещаться в требуемом направлении, приспосабливается модель полуактивной подвески. Скорость подрессоренной массы получается следующим образом с использованием модели полуактивной подвески:
Уравнение 3 оценки
dz2=-(1/Ms)·(1/s2)·{(Cs+Cv)·s+Ks}(dz2-dz1),
где Cv=Csky·{dz2/(dz2-dz1)}, когда dz2·(dz2-dz1)≥0, и Cv=0, когда dz2·(dz2-dz1)<0. Другими словами, Cv является прерывистым значением.
Здесь, предполагается, что скорость подрессоренной массы оценивается с использованием простого фильтра. В модели полуактивной подвески, когда эта модель рассматривается как фильтр, соответствующие переменные соответствуют коэффициентам фильтрации, и псевдодифференциальный член {(Cs+Cv)·s+Ks} включает в себя прерывистый переменный коэффициент Cv демпфирования. Таким образом, чувствительность фильтра становится нестабильной, что приводит к невозможности получения надлежащей точности оценки. Нестабильная чувствительность фильтра вызывает, в частности, смещение фазы. Если взаимосвязь или соответствие между фазой и знаком скорости подрессоренной массы нарушено, не может выполняться управление подвеской Skyhook. По этой причине, даже когда используется полуактивный S/A 3, скорость подрессоренной массы оценивается с использованием модели активной подвески, которая может использовать стабильное значение Csky непосредственно без зависимости от знаков скорости подрессоренной массы и скорости хода. Скорость подрессоренной массы получается следующим образом с использованием модели активной подвески:
Уравнение 4 оценки
dz2=-(1/s)·{1/(s+Csky/Ms)}·{(Cs/Ms)s+(Ks/Ms)}(dz2-dz1)
В этом случае, псевдодифференциальный член {(Cs/Ms)s+(Ks/Ms)} не формирует неоднородность, и член {1/(s+Csky/Ms)} может быть сконфигурирован с помощью фильтра нижних частот. Как результат, чувствительность фильтра становится стабильной, и может получаться надлежащая точность оценки. Здесь, даже если должна приспосабливаться модель активной подвески, фактически доступно только полуактивное управление, в силу чего управляемый диапазон должен разделяться напополам. Таким образом, оцененная скорость подрессоренной массы становится меньше фактической скорости в полосе частот ниже резонанса подрессоренной массы. Тем не менее, самым важным аспектом при управлении подвеской Skyhook является фаза, и при условии, что взаимосвязь фазы и знака поддерживается, может выполняться управление подвеской Skyhook. Дополнительно, скорость подрессоренной массы является регулируемой посредством других коэффициентов и т.п. Следовательно, это не является проблематичным.
Из взаимосвязи, описанной выше, следует понимать, что скорости подрессоренной массы могут быть оценены, как только скорости хода соответствующих колес становятся доступными. Далее, поскольку фактическое транспортное средство имеет не одно колесо, а четыре колеса, исследование проводится на основе того, какое состояние подрессоренной массы оценивается посредством разложения по собственным формам на угловую скорость крена, угловую скорость продольного движения относительно поперечной оси и угловую скорость вертикального колебательного движения, с использованием скоростей хода этих соответствующих колес. Когда эти три компонента должны быть вычислены из скоростей хода четырех колес, один соответствующий компонент отсутствует, что делает решение неопределимым. Соответственно, вводится угловая скорость отклонения от вертикали, указывающая движение диагональных колес. Следующая формула устанавливается, когда член вертикального колебательного движения, член крена, член продольного движения относительно поперечной оси и член отклонения от вертикали величины хода обозначаются посредством xsB, xsR, xsP и xsW, соответственно, и величины хода, соответствующие скоростям Vz_sFL, Vz_sFR, Vz_sRL и Vz_sRR хода, обозначаются посредством z_sFL, z_sFR, z_sRL и z_sRR, соответственно.
Уравнение 4

Из вышеуказанного выражения отношения, дифференциалы dxsB, dxsR, dxsP и dxsW xsB, xsR, xsP и xsW выражаются следующим образом:
dxsB=(¼)(Vz_sFL+Vz_sFR+Vz_sRL+Vz_sRR)
dxsR=(¼)(Vz_sFL-Vz_sFR+Vz_sRL-Vz_sRR)
dxsP=(¼)(-Vz_sFL-Vz_sFR+Vz_sRL+Vz_sRR)
dxsW=(¼)(-Vz_sFL+Vz_sFR+Vz_sRL-Vz_sRR)
Взаимосвязь между скоростью подрессоренной массы и скоростью хода получена с использованием уравнения 4 оценки, описанного выше. Таким образом, угловая скорость вертикального колебательного движения (dB), угловая скорость крена (dR) и угловая скорость продольного движения относительно поперечной оси (dP) могут выражаться следующим образом, когда - (1/s)·{1/(s+Csky/Ms)}·{(Cs/Ms)s+(Ks/Ms)} в уравнении 4 оценки описывается как G, и GB, GR и GP задаются с учетом модальных параметров CskyB, CskyR, CskyP, CsB, CsR, CsP, KsB, KsR и KsPI, соответствующих члену вертикального колебательного движения, члену крена и члену продольного движения относительно поперечной оси Csky, Cs и Ks, соответственно.
dB=GB·dxsB
dR=GB·dxsR
dP=GB·dxsP
Из вышеприведенного описания, состояние подрессоренной массы транспортного средства может быть оценено на основе скоростей хода соответствующих колес.
МОДУЛЬ УПРАВЛЕНИЯ ПОДАВЛЕНИЕМ ВИБРАЦИИ ПОДРЕССОРЕННОЙ МАССЫ
Далее приводится описание управления подвеской Skyhook, выполняемого посредством модуля 101a управления подавлением вибрации подрессоренной массы, модуля 201 управления подвеской Skyhook и модуля 33 управления демпфированием подрессоренной массы. При управлении подвеской Skyhook управление выполняется таким образом, что состояние подрессоренной массы, оцененное на основе скоростей вращения колес, как описано выше, может достигать целевого состояния подрессоренной массы. Другими словами, изменение скорости вращения колес изменяется в соответствии с состоянием подрессоренной массы, и для того, чтобы управлять состоянием подрессоренной массы, например, вертикальным колебательным движением, креном и продольным движением относительно поперечной оси, в целевое состояние подрессоренной массы, изменение определенной скорости вращения колес управляется с возможностью предполагать изменение скорости вращения колес, которое соответствует целевому состоянию подрессоренной массы.
КОНФИГУРАЦИЯ МОДУЛЯ УПРАВЛЕНИЯ ПОДВЕСКОЙ SKYHOOK
В устройстве управления транспортного средства в первом варианте осуществления, двигатель 1, тормоза 20 и S/A 3 предоставляются в качестве трех типов актуаторов, чтобы осуществлять управление стабилизацией состояния подрессоренной массы. Из них, модуль 101a управления подрессоренной вибрацией контроллера 1a двигателя управляет угловой скоростью вертикального колебательного движения и угловой скоростью продольного движения относительно поперечной оси. Модуль 201 управления подвеской Skyhook контроллера 2a тормоза управляет угловой скоростью продольного движения относительно поперечной оси, а модуль 33a управления подвеской Skyhook S/A-контроллера 3a управляет угловой скоростью вертикального колебательного движения, угловой скоростью крена и угловой скоростью продольного движения относительно поперечной оси.
Величина управления подвеской Skyhook в вертикальном направлении выражается следующим образом:
FB=CskyB·dB
Величина управления подвеской Skyhook в направлении крена выражается следующим образом:
FR=CskyR·dR
Величина управления подвеской Skyhook в продольном направлении выражается следующим образом:
FP=CskyP·dP
ВЕЛИЧИНА FB УПРАВЛЕНИЯ ПОДВЕСКОЙ SKYHOOK В ВЕРТИКАЛЬНОМ НАПРАВЛЕНИИ FB
Величина FB управления подвеской Skyhook при вертикальном колебательном движении вычисляется посредством модуля 101a управления подавлением вибрации подрессоренной массы в качестве части величины управления стабилизацией состояния с использованием двигателя, а также посредством модуля 33a управления подвеской Skyhook в качестве части величины управления стабилизацией состояния с использованием S/A.
ВЕЛИЧИНА FR УПРАВЛЕНИЯ ПОДВЕСКОЙ SKYHOOK В НАПРАВЛЕНИИ FR КРЕНА
Величина FR управления подвеской Skyhook при крене вычисляется посредством модуля 33a управления подвеской Skyhook в качестве части величины управления стабилизацией состояния с использованием S/A.
ВЕЛИЧИНА УПРАВЛЕНИЯ ПОДВЕСКОЙ SKYHOOK В ПРОДОЛЬНОМ НАПРАВЛЕНИИ FP
Величина FP управления подвеской Skyhook при продольном движении относительно поперечной оси вычисляется посредством модуля 101a управления подавлением вибрации подрессоренной массы в качестве части величины управления стабилизацией состояния с использованием двигателя, а также посредством модуля 201 управления подвеской Skyhook в качестве величины управления стабилизацией состояния с использованием тормоза, и дополнительно посредством модуля 33a управления подвеской Skyhook в качестве части величины управления стабилизацией состояния с использованием S/A, соответственно.
Чтобы не вызывать дискомфорт у водителя, модуль 101 управления стабилизацией состояния с использованием двигателя имеет предельное значение для ограничения величины управления крутящим моментом двигателя, соответствующей величине управления стабилизацией состояния с использованием двигателя. Величина управления крутящим моментом двигателя ограничивается таким образом, что продольное ускорение, преобразованное из величины управления крутящим моментом двигателя, может попадать в заданный диапазон. Следовательно, когда величина управления стабилизацией состояния с использованием двигателя (величина управления крутящим моментом двигателя), вычисленная на основе FB и FP, равна или превышает предельное значение, выводимая величина управления стабилизацией состояния с использованием двигателя является величиной управления подвеской Skyhook для угловой скорости вертикального колебательного движения и угловой скорости продольного движения относительно поперечной оси, достижимой с предельным значением. Модуль 102 управления двигателем вычисляет величину управления крутящим моментом двигателя на основе величины управления стабилизацией состояния с использованием двигателя, соответствующей предельному значению, и выводит величину управления крутящим моментом двигателя в двигатель 1. Следует отметить, что, относительно величины управления стабилизацией состояния с использованием двигателя, в дополнение к положительному крутящему моменту приведения в движение, отрицательный тормозной крутящий момент доступен посредством работы в режиме торможения двигателем, активное управление выполняется в ограниченной области, в которой ограничивается величина управления крутящим моментом двигателя.
Как и в случае двигателя 1, чтобы не вызывать дискомфорт у водителя, модуль 201 управления подвеской Skyhook имеет предельное значение для ограничения величины управления тормозным крутящим моментом (предельное значение подробно описано ниже). Величина управления тормозным крутящим моментом ограничивается таким образом, что продольное ускорение, преобразованное из величины управления тормозным крутящим моментом, может попадать в заданный диапазон (определенный с учетом таких факторов, как дискомфорт, испытываемый пассажиром, и срок службы актуатора). Следовательно, когда величина управления стабилизацией состояния с использованием тормоза, вычисленная на основе величины FP управления подвеской Skyhook при продольном движении относительно поперечной оси, равна или превышает предельное значение, модуль 201 управления подвеской Skyhook выводит величину подавления угловой скорости продольного движения относительно поперечной оси (называемую "величиной управления стабилизацией состояния с использованием тормоза ниже"), достижимую с предельным значением, в контроллер 202 тормоза. Модуль 202 управления тормозом вычисляет величину управления тормозным крутящим моментом (или замедление) на основе величины управления стабилизацией состояния с использованием тормоза, соответствующей предельному значению, и выводит величину управления тормозным крутящим моментом в тормоз 20.
УПРАВЛЕНИЕ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ ОТНОСИТЕЛЬНО ПОПЕРЕЧНОЙ ОСИ ПРИ ТОРМОЖЕНИИ
Далее приводится описание управления продольным движением относительно поперечной оси при торможении. В общем, поскольку вертикальное колебательное движение и продольное движение относительно поперечной оси являются управляемыми посредством тормозов 20, может быть предпочтительным, если оба из них управляются. Тем не менее, настоящее изобретение приспосабливает конфигурацию, в которой тормоза 20 выделяются для управления продольным движением относительно поперечной оси, поскольку вертикальное колебательное движение имеет следующую тенденцию. В частности, управление вертикальным колебательным движением для тормозов 20 инструктирует всем тормозам 20 четырех колес за счет этого формировать тормозную силу одновременно. По этой причине, хотя управление в вертикальном направлении имеет низкий приоритет управления, и трудно достигать результата управления, водитель испытывает ощущение сильного замедления, что с большой вероятностью заставляет водителя ощущать дискомфорт. Фиг. 8 является блок-схемой управления, иллюстрирующей управление продольным движением относительно поперечной оси при торможении в варианте 1 осуществления. Следующие выражения отношения устанавливаются, когда "m" обозначает массу кузова транспортного средства, BFf обозначает тормозную силу передних колес, BFr обозначает тормозную силу задних колес, Hcg обозначает, что высота центра тяжести транспортного средства от поверхности дороги, "a" обозначает ускорение транспортного средства, Mp обозначает продольный момент, и Vp обозначает угловую скорость продольного движения относительно поперечной оси.
BFf+BFr=m·a
m·a·Hcg=Mp
Mp=(BFf+BFr)·Hcg
Когда угловая скорость Vp продольного движения относительно поперечной оси является положительной, т.е. сторона передних колес проседает или опускается, тормозная сила не прикладывается. Это обусловлено тем, что в этом случае, тормозная сила приводит к тому, что сторона передних колес еще больше проседает или опускается, способствуя продольному движению относительно поперечной оси. С другой стороны, когда угловая скорость Vp продольного движения относительно поперечной оси является отрицательной, т.е. сторона передних колес поднимается, тормозная сила задается посредством продольного момента при торможении, чтобы подавлять подъем стороны передних колес. Таким образом, поле зрения водителя обеспечивается для того, чтобы упрощать просмотр вперед, что способствует улучшению в смысле безопасности и в смысле горизонтальности. Таким образом, данная величина управления выражается следующим образом:
Mp=0, когда Vp>0 (когда передние колеса опускаются);
Mp=CskyP·Vp, когда Vp≤0 (когда передние колеса поднимаются).
Таким образом, тормозной крутящий момент формируется только тогда, когда передняя сторона транспортного средства поднимается. Таким образом, также по сравнению со случаем формирования тормозного крутящего момента, когда проседает передняя сторона транспортного средства, может снижаться сформированное замедление. Кроме того, поскольку частота приведения в действие актуатора может быть уменьшена наполовину, может использоваться недорогой актуатор.
На основе вышеуказанных взаимосвязей, модуль 334 вычисления величины управления стабилизацией состояния с использованием тормоза состоит из нижеописанных блоков управления. Иными словами, модуль 3341 определения кода обработки в мертвой зоне сконфигурирован с возможностью определять знак введенной угловой скорости Vp продольного движения относительно поперечной оси. Затем, когда угловая скорость Vp продольного движения относительно поперечной оси является положительной, модуль 3341 определения кода обработки в мертвой зоне выводит 0 (нуль) в процессор 3342 уменьшения ощущения замедления, поскольку не требуется управление продольным движением относительно поперечной оси. Когда угловая скорость Vp продольного движения относительно поперечной оси является отрицательной, модуль 3341 определения кода обработки в мертвой зоне оценивает, что управление продольным движением относительно поперечной оси может выполняться, и выводит сигнал угловой скорости продольного движения относительно поперечной оси в процессор 3342 уменьшения ощущения замедления.
ПРОЦЕСС УМЕНЬШЕНИЯ ОЩУЩЕНИЯ ЗАМЕДЛЕНИЯ
Далее описывается процесс уменьшения ощущения замедления. Этот процесс выполняется посредством модуля 334 вычисления величины управления стабилизацией состояния с использованием тормоза и соответствует вышеописанному процессу ограничения величины управления тормозным крутящим моментом с использованием предельного значения. Квадратичный процессор 3342a возводит в квадрат сигнал угловой скорости продольного движения относительно поперечной оси, чтобы за счет этого инвертировать его знак и сглаживать повышение управляющей силы. Модуль 3342b вычисления квадратичного момента демпфирования угловой скорости продольного движения относительно поперечной оси вычисляет продольный момент Mp посредством умножения квадратичной угловой скорости продольного движения относительно поперечной оси на усиление CskyP подвески в члене продольного движения относительно поперечной оси, в котором учитывается квадратичная обработка. Модуль 3342c вычисления целевого замедления вычисляет целевое замедление посредством деления продольного момента Mp на массу m и высоту Hcg центра тяжести транспортного средства от поверхности дороги.
Модуль 3342d ограничения пороговых значений рывка определяет то, превышает или нет темп изменения вычисленного целевого замедления, т.е. рывок, предварительно установленное пороговое значение рывка при замедлении и предварительно установленное пороговое значение рывка при ускорении, и то, находится или нет целевое замедление в рамках предельных значений для продольного ускорения. Если темп изменения превышает любое из пороговых значений, целевое замедление корректируется до значения, не превышающего пороговые значения рывка. Если целевое замедление превышает предельное значение, оно задается в рамках предельных значений. Таким образом, формирование замедления может быть сформировано без возникновения у водителя чувства дискомфорта.
Модуль 3343 преобразования целевого продольного момента вычисляет целевой продольный момент посредством умножения степени целевого замедления, ограниченной посредством модуля 3342d ограничения пороговых значений рывка, на массу m и высоту Hcg и выводит целевой продольный момент в контроллер 202 тормоза.
МОДУЛЬ УПРАВЛЕНИЯ ЧАСТОТНОЙ ЧУВСТВИТЕЛЬНОСТЬЮ
Далее описывается процесс управления частотной чувствительностью, выполняемый посредством модуля управления подавлением вибрации или демпфированием подрессоренной массы. В варианте 1 осуществления, управление демпфированием подрессоренной массы выполняется посредством выполнения управления подвеской Skyhook на основе скоростей подрессоренной массы, оцененных по существу из значений определения, полученных посредством датчиков 14 хода. Тем не менее, возникает такой случай, в котором соответствующая точность оценки не может быть получена с использованием датчика 5 скорости вращения колес. Дополнительно, возникает случай, в котором в зависимости от состояния движения или намерения водителя, желательно комфортное состояние движения (с приоритетом плавной езде, а не ощущению плоскости кузова транспортного средства). В таких случаях, при векторном управлении, например, управлении подвеской Skyhook, незначительное смещение фазы затрудняет надлежащее выполнение управления, поскольку взаимосвязь между знаками скорости хода и скорости подрессоренной массы (например, фазами) является важной. По этой причине, приспосабливается частотно-чувствительное управление, которое представляет собой управление подавлением вибрации подрессоренной массы, выполняемое согласно скалярной величине вибрационных характеристик.
Фиг. 9 является графиком, показывающим частотную характеристику скорости вращения колес, определенную посредством датчика скорости вращения колес, и частотную характеристику хода посредством датчика хода, не установленного в варианте осуществления для сравнения. В частотной характеристике, абсолютная величина амплитуды относительно частоты рассматривается в качестве скалярной величины и представляется на вертикальной оси. При сравнении частотного компонента датчика 5 скорости вращения колес с частотным компонентом датчика хода следует принимать во внимание, что практически аналогичная величина скаляра демонстрируется через резонансную частоту подрессоренной массы и резонансную частоту неподрессоренной массы. Таким образом, из значений определения датчика 5 скорости вращения колес, демпфирующая сила должна задаваться на основе этой частотной характеристики. Здесь, частотный диапазон, в котором существует компонент резонансной частоты подрессоренной массы, упоминается в качестве частотного диапазона области ощущений мягкости, либо FUWA-области или диапазона (0,5-3 Гц), в которой пассажир испытывает такое ощущение, что все человеческое тело колеблется, как будто подброшено в воздух, так что ощущается уменьшение гравитационного ускорения, действующего на пассажира. Область или диапазон между резонансной частотой подрессоренной массы и резонансной частотой неподрессоренной массы упоминается в качестве области ощущений жесткости или HYOKO-области (3-6 Гц), в которой у пассажира хоть и не вызывается ощущение снижения гравитационного ускорения, но вызывается такое ощущение, как будто он подпрыгивает вверх и вниз, как на идущей рысью лошади, или другими словами, такое ощущение, что все тело продолжает непрерывно перемещаться вверх и вниз. Область, в которой существует резонансная частота неподрессоренной массы, упоминается в качестве области ощущений дрожания или BURU-области (6-23 Гц), в которой небольшая тряска передается на часть человеческого тела, например, на бедра, хотя и не в той степени, в которой масса человеческого тела продолжает вертикально колебаться.
Фиг. 10 является блок-схемой управления, иллюстрирующей частотно-чувствительное управление при управлении подавлением вибрации подрессоренной массы в первом варианте осуществления. Полосовой режекторный фильтр 350 исключает шум, отличный от компонента вибрации, для использования в настоящем управлении относительно каждого значения датчика скорости вращения колес. Модуль 351 разделения на заданные частотные области разделяет компонент вибрации на соответствующие области из области ощущений мягкости, области ощущений жесткости и области ощущений дрожания. Процессор 352 преобразования Гильберта выполняет преобразование Гильберта для каждой из разделенных полос частот, чтобы преобразовывать их в скалярные величины, которые определяются на основе амплитуд частот (в частности, область, вычисленная посредством амплитуды и полосы частот).
Модуль 353 взвешивания вибрации транспортного средства задает весовые коэффициенты каждой из полос частот, соответствующих области ощущений мягкости, области ощущений жесткости и области ощущений дрожания, посредством которых вибрации соответствующих полос частот фактически передаются в кузов транспортного средства. Модуль 354 взвешивания ощущений человека задает весовые коэффициенты каждой из полос частот, соответствующих области ощущений мягкости, области ощущений жесткости и области ощущений дрожания, посредством которых вибрации соответствующих полос частот фактически передаются пассажиру.
Далее приводится описание взвешивания ощущений человека. Фиг. 11 является корреляционной диаграммой, иллюстрирующей характеристики ощущений человека относительно частоты. Как показано на фиг. 11, чувствительность пассажира относительно частоты является относительно низкой в области ощущений мягкости, т.е. в низкочастотной области, и чувствительность постепенно увеличивается к высокочастотной области. Колебания с меньшей вероятностью должны передаваться пассажиру в высокочастотной области за пределами области ощущений дрожания. С учетом этой ситуации, весовой коэффициент Wf ощущений человека в области ощущений мягкости задается равным 0,17, весовой коэффициент Wh ощущений человека о второй области ощущений жесткости задается равным 0,34, что превышает Wf, и весовой коэффициент Wb ощущений человека в области ощущений дрожания задается равным 0,38, что превышает Wf и Wh. Таким образом, может быть дополнительно повышена корреляция между скалярной величиной каждой из полос частот и вибрациями, фактически передаваемыми пассажиру. Следует отметить, что эти два весовых коэффициента могут быть изменены надлежащим образом согласно концепции транспортного средства или предпочтению водителя.
Модуль 355 определения весовых коэффициентов вычисляет отношение каждого из весовых коэффициентов соответствующих полос частот ко всем весовым коэффициентам. Когда "a" обозначает весовой коэффициент для области ощущений мягкости, "b" обозначает весовой коэффициент для области ощущений жесткости, и "c" обозначает весовой коэффициент для области ощущений дрожания, весовой коэффициент для области ощущений мягкости выражается посредством (a/(a+b+c)), весовой коэффициент для области ощущений жесткости выражается посредством (b/(a+b+c)), а весовой коэффициент для области ощущений дрожания выражается посредством (c/(a+b+c)), соответственно.
Модуль 356 вычисления скалярных величин получает конечные скалярные величины посредством соответствующего умножения скалярных величин полос частот, вычисленных посредством процессора 352 преобразования Гильберта, на весовые коэффициенты, вычисленные посредством модуля 355 определения весовых коэффициентов, и выводит конечные скалярные величины. Процесс до сих пор выполняется для каждого из значений датчика скорости вращения колес для соответствующих колес.
Модуль 357 выбора максимальных значений выбирает максимальное значение из конечных скалярных величин, вычисленных для соответствующих четырех колес. Следует отметить, что 0,1 внизу задается таким образом, что когда сумма максимальных значений назначается знаменателю в последующем процессе, знаменатель не может задаваться равным 0 ("нулю"). Модуль 358 вычисления отношений вычисляет отношение посредством назначения суммы максимальных значений скалярных величин соответствующих полос частот знаменателю и назначения максимального значения скалярной величины полосы частот, соответствующей области ощущений мягкости, числителю. Другими словами, модуль 358 вычисления отношений вычисляет отношение области ощущений мягкости, содержащееся в сумме компонентов вибрации. Фильтр 359 резонанса подрессоренной массы выполняет процесс фильтрации приблизительно резонансной частоты подрессоренной массы в 1,2 Гц для вычисленного отношения, чтобы извлекать компонент резонансной частоты подрессоренной массы, соответствующий области ощущений мягкости, на основе вычисленного отношения. Это обусловлено тем, что поскольку область ощущений мягкости существует вокруг 1,2 Гц, можно считать, что отношение области ощущений мягкости также изменяется вокруг 1,2 Гц. Далее, конечное извлеченное отношение выводится в модуль 35 управления демпфирующей силой, который выводит величину частотно-чувствительного управления демпфирующей силой согласно этому отношению.
Фиг. 12 является характеристической диаграммой, показывающей взаимосвязь между коэффициентом вхождения вибраций области ощущений мягкости и демпфирующей силой, полученной посредством частотно-чувствительного управления первого варианта осуществления. Как показано на фиг. 12, уровень вибрации резонанса подрессоренной массы снижается посредством задания демпфирующей силы высокой, если отношение области ощущений мягкости является большим. Даже когда демпфирующая сила задается высокой, высокочастотные вибрации и вибрации, которые сопровождают подпрыгивание, не передаются пассажиру, поскольку область ощущений жесткости и область ощущений дрожания занимают небольшие доли. С другой стороны, посредством задания демпфирующей силы низкой, когда отношение области ощущений мягкости является небольшим, характеристика передачи вибрации, равная или превышающая резонанс подрессоренной массы, снижается, чтобы за счет этого подавлять высокочастотные вибрации, что способствует плавной и комфортной езде.
Далее приводится описание преимуществ частотно-чувствительного управления по сравнению с управлением подвеской Skyhook. Фиг. 13 показывает схему, иллюстрирующую частотную характеристику скорости вращения колес, определенной посредством датчика 5 скорости вращения колес в определенных состояниях движения. Эта характеристика должна получаться, если транспортное средство движется, например, на дороге с твердым булыжным покрытием, имеющей последовательные небольшие ямки и кочки. Когда управление подвеской Skyhook выполняется для движения транспортного средства на поверхности дороги, имеющей такую характеристику, управление подвеской Skyhook определяет демпфирующую силу на основе значения пиковой амплитуды. Следовательно, если оценка фазы ухудшается относительно ввода высокочастотных вибраций, очень высокая демпфирующая сила задается в ложное время, так что ухудшается характеристика высокочастотной вибрации.
Напротив, частотно-чувствительное управление, которое использует не векторы, а скалярные величины, задает небольшую демпфирующую силу для такой поверхности дороги, как показано на фиг. 13, поскольку отношение области ощущений мягкости является небольшим. Таким образом, даже когда амплитуда вибраций в области ощущений дрожания является большой, характеристика передачи вибрации снижается в достаточной степени, чтобы не допускать понижения характеристик подавления высокочастотной вибрации. По этой причине, высокочастотные вибрации могут подавляться посредством частотно-чувствительного управления, которое использует скалярные величины в области, в которой управление посредством управления подвеской Skyhook с использованием дорогих датчиков является затруднительным вследствие снижения точности оценки фазы.
МОДУЛЬ УПРАВЛЕНИЯ ВХОДНЫМИ ВОЗДЕЙСТВИЯМИ ОТ ВОДИТЕЛЯ НА СТОРОНЕ S/A
Далее описывается модуль управления входными воздействиями от водителя на стороне S/A. Модуль 31 управления входными воздействиями от водителя на стороне S/A вычисляет величину управления демпфирующей силой входных воздействий от водителя для достижения поведения транспортного средства, которого хочет добиться водитель, на основе сигналов из датчика 7 угла поворота при рулении и датчика 8 скорости транспортного средства, и выводит величину управления демпфирующей силой входных воздействий от водителя в модуль 35 управления демпфирующей силой. Например, когда водитель выполняет поворот, передняя часть транспортного средства поднимается, что с большой вероятностью должно отклонять поле зрения водителя от поверхности дороги. В этом случае, чтобы не допускать такой подъем передней части, демпфирующие силы для четырех колес выводятся в качестве величин управления демпфирующей силой входных воздействий от водителя. Дополнительно, модуль 31 управления входными воздействиями от водителя на стороне S/A также выводит величины управления демпфирующей силой входных воздействий от водителя для подавления движения по крену, вызываемого во время поворота.
УПРАВЛЕНИЕ ПО КРЕНУ ПОСРЕДСТВОМ МОДУЛЯ УПРАВЛЕНИЯ ВХОДНЫМИ ВОЗДЕЙСТВИЯМИ ОТ ВОДИТЕЛЯ НА СТОРОНЕ S/A
Далее приводится описание управления подавлением крена, выполняемого посредством модуля управления входными воздействиями от водителя на стороне S/A. Фиг. 14 является блок-схемой управления, иллюстрирующей конфигурацию управления подавлением угловой скорости крена в первом варианте осуществления. Модуль 31b1 оценки поперечного ускорения оценивает поперечное ускорение Yg на основе угла δf поворота при рулении для передних колес, определенного посредством датчика 7 угла поворота при рулении, и скорости VSP транспортного средства, определенной посредством датчика 8 скорости транспортного средства. Поперечное ускорение Yg вычисляется посредством нижеприведенного уравнения на основе модели вида сверху транспортного средства, при этом "A" является заданным значением.
Yg=(VSP2/(1+A·VSP2))·δf
Модуль 31b2 создания компонента опережения по фазе на 90° дифференцирует оцененное поперечное ускорение Yg и выводит дифференцированное поперечное ускорение dYg. Первый модуль 31b4 суммирования суммирует поперечное ускорение Yg и дифференцированное поперечное ускорение dYg. Модуль 31b3 создания компонента задержки по фазе на 90° выводит компонент F (Yg), полученный посредством задержки фазы оцененного поперечного ускорения Yg на 90°. Второй модуль 31b5 суммирования суммирует значение, полученное посредством первого модуля 31b4 суммирования, с компонентом F (Yg). Модуль 31b6 преобразования Гильберта вычисляет скалярную величину на основе формы сигнала огибающей для суммированного значения. Модуль 31b7 умножения усиления умножает скалярную величину, которая получается на основе формы сигнала огибающей, на усиление, чтобы вычислять величину управления стабилизацией состояния при входном воздействии от водителя, используемую для управления подавлением угловой скорости крена, и выводит величину управления в модуль 35 управления демпфирующей силой.
Фиг. 15 является временной диаграммой, иллюстрирующей процесс формирования формы сигнала огибающей при управлении подавлением угловой скорости крена в первом варианте осуществления. После того, как водитель начал руление во время t1, угловая скорость крена начинает формироваться постепенно. В это время, формирование угловой скорости крена на начальной стадии руления может подавляться посредством величины управления стабилизацией состояния при входном воздействии от водителя, вычисленной из скалярной величины, которая основана на форме сигнала огибающей, сформированной посредством добавления компонента опережения по фазе на 90°. Затем, когда водитель прекращает руление во время t2, компонент F(Yg) задержки по фазе добавляется вместо компонента опережения по фазе на 90°. В этом установившемся состоянии руления, даже когда угловая скорость крена не изменяется значительно, формируется компонент резонанса угловой скорости крена, который соответствует откату угловой скорости крена. Если компонент F(Yg) задержки по фазе не добавлен, небольшая демпфирующая сила должна задаваться в течение периода между временем t2 и временем t3, что может делать поведение транспортного средства неустановившимся вследствие компонента резонанса угловой скорости крена. Компонент F(Yg) задержки по фазе на 90° добавляется, чтобы подавлять этот компонент резонанса угловой скорости крена.
Когда водитель поворачивает руль из позиции прекращения руления обратно в нейтральную позицию, чтобы двигаться по прямой во время t3, снижается поперечное ускорение Yg. Кроме того, угловая скорость крена снижается до небольшого значения. Демпфирующая сила надежно обеспечивается за счет действия компонента F(Yg) задержки по фазе на 90°. Поэтому может не допускаться возникновение неустановившегося поведения транспортного средства вследствие компонента резонанса угловой скорости крена.
МОДУЛЬ УПРАВЛЕНИЯ ПОДАВЛЕНИЕМ ВИБРАЦИИ НЕПОДРЕССОРЕННОЙ МАССЫ
Далее описывается конфигурация модуля управления подавлением вибрации неподрессоренной массы. Как описано выше в отношении традиционного транспортного средства на фиг. 7A, шина также имеет коэффициент упругости и коэффициент демпфирования. Поэтому также существует полоса резонансных частот. Тем не менее, поскольку шина имеет меньшую массу и больший коэффициент упругости, чем подрессоренная масса, компонент резонанса неподрессоренной массы существует на более высокой частоте, чем компонент резонанса подрессоренной массы. Этот компонент резонанса неподрессоренной массы приводит к тряске шины на стороне неподрессоренной массы, что может приводить к плохим рабочим характеристикам удержания дороги. Дополнительно, трясущееся движение на стороне неподрессоренной массы может вызывать дискомфорт для пассажира. Демпфирующая сила согласно компоненту резонанса неподрессоренной массы задается так, чтобы подавлять тряску шины вследствие резонанса неподрессоренной массы.
Фиг. 16 является блок-схемой, иллюстрирующей конфигурацию управления для управления подавлением вибрации или демпфированием неподрессоренной массы в первом варианте осуществления. Модуль 341 извлечения компонентов резонанса неподрессоренной массы извлекает компонент резонанса неподрессоренной массы посредством применения полосовой фильтрации к флуктуациям скорости вращения колес, выводимым из модуля 321b вычисления отклонения в модуле 32 оценки состояния движения. Компонент резонанса неподрессоренной массы извлекается из области приблизительно между 10-20 Гц частотного компонента скорости вращения колес. Модуль 342 формирования формы сигнала огибающей получает скалярное значение извлеченного компонента резонанса неподрессоренной массы и формирует форму сигнала огибающей посредством использования фильтра огибающей. Модуль 343 умножения усиления умножает скалярный компонент резонанса неподрессоренной массы на усиление, чтобы вычислять величину управления демпфирующей силой для подавления вибрации неподрессоренной массы, и выводит ее в контроллер 35 демпфирующей силы. В первом варианте осуществления, компонент резонанса неподрессоренной массы извлекается через полосовую фильтрацию флуктуаций скорости вращения колес, выводимых из модуля 321b вычисления отклонения модуля 32 оценки состояния движения. Вместо этого, модуль 32 оценки состояния движения может извлекать скорость неподрессоренной массы посредством применения полосовой фильтрации к датчику определенной скорости вращения колес. Альтернативно, неподрессоренный компонент резонанса может быть извлечен посредством неподрессоренной скорости вместе со скоростью подрессоренной массы в модуле оценки состояния езды или движения.
КОНФИГУРАЦИЯ КОНТРОЛЛЕРА ДЕМПФИРУЮЩЕЙ СИЛЫ
Далее описывается конфигурация модуля 35 управления демпфирующей силой. Фиг. 17 является блок-схемой управления, иллюстрирующей конфигурацию управления модуля 35 управления демпфирующей силой в первом варианте осуществления. Модуль 35a преобразования степени насыщения принимает величину управления демпфирующей силой входных воздействий от водителя из модуля 31 управления входными воздействиями от водителя, величину управления стабилизацией состояния с использованием S/A, выводимую из модуля 33a управления подвеской Skyhook, величину частотно-чувствительного управления демпфирующей силой, выводимую из модуля 33b частотно-чувствительного управления, величину управления демпфирующей силой для подавления вибрации неподрессоренной массы, выводимую из модуля 34 управления демпфированием неподрессоренной массы, и скорость хода, вычисленную посредством модуля 32 оценки состояния движения, и преобразует эти величины в эквивалентные коэффициенты вязкостного демпфирования. Затем, на основе скорости хода, эквивалентного коэффициента Ce вязкостного демпфирования и максимального значения Cemax и минимального значения Cemin коэффициента демпфирования при этой скорости хода, степень DDS насыщения (%) вычисляется посредством следующего уравнения:
DDS=((Ce-Cemin)/(Cemax-Cemin))×100
Далее описывается причина введения степени насыщения. Фиг. 18 является схемой, показывающей взаимосвязь между степенью насыщения и управляющим током в S/A 3 в первом варианте осуществления. Характеристика демпфирующей силы, показанная сверху слева на фиг. 18, представляет демпфирующую силу относительно скорости хода, и после преобразования в характеристики коэффициентов демпфирования, доступны характеристики, показанные сверху в центре. Поскольку коэффициент демпфирования зависит от скорости хода, для того чтобы повышать точность при определении текущего значения, чрезвычайно большой объем данных должен быть накоплен в области хранения, так что в зависимости от объема данных, трудно обеспечивать достаточную точность.
Здесь, предполагается, что требуемый эквивалентный коэффициент Ce вязкостного демпфирования должен выражаться с использованием максимального значения Cemax коэффициента демпфирования и минимального значения Cemin коэффициента демпфирования при каждой скорости хода. Затем, он может представляться как характеристика степени насыщения, как показано снизу слева на фиг. 18. Когда характеристика степени насыщения рассматривается со степенью DDS насыщения, заданной в качестве горизонтальной оси вдоль оси направления скорости хода, следует принимать во внимание, что управляющие токи, соответствующие каждой степени насыщения, распределяются в очень узком диапазоне. Таким образом, существует взаимосвязь между степенью насыщения и управляющим током, которая не зависит от скорости хода. Следовательно, посредством принятия среднего значений управляющего тока относительно направления скорости хода и с использованием этого среднего значения управляющего тока, может быть получена взаимосвязь между степенью насыщения и токовой характеристикой, показанной снизу справа на фиг. 18. Вследствие вышеизложенных причин в первом варианте осуществления, после того, как коэффициент демпфирования вычислен и преобразован в степень насыщения, должно достигаться повышение точности управления.
Арбитражный модуль 35b коэффициентов демпфирования осуществляет арбитраж касательно того, на основе какой из степеней насыщения, преобразованных в модуле 35a преобразования степени насыщения (в дальнейшем, соответствующие степени насыщения называются "степенью k1 насыщения входных воздействий от водителя", "степенью k2 насыщения стабилизации состояния с использованием S/A", "частотно-чувствительной степенью k3 насыщения и "степенью k4 насыщения подавления вибрации неподрессоренной массы", соответственно), выполняется управление. Степень насыщения после арбитража ограничивается посредством карты ограничения степени насыщения, предварительно подготовленной на основе скорости хода, чтобы выводить ограниченную степень насыщения в качестве конечной степени насыщения. Модуль 35c преобразования управляющих сигналов преобразует степень насыщения в соответствующий конечный управляющий сигнал (значение управляющего тока), который должен быть выведен в S/A 3.
МОДУЛЬ АРБИТРАЖА СТЕПЕНИ НАСЫЩЕНИЯ
Далее приводится описание арбитражного процесса, выполняемого посредством модуля 35b арбитража степени насыщения. Система или устройство управления транспортного средства в первом варианте осуществления имеет четыре режима управления, т.е. стандартный режим, спортивный режим, комфортный режим и режим движения по шоссе. Стандартный режим предполагает, что транспортное средство ездит по городу и выполняет умеренные повороты; спортивный режим предполагает, что транспортное средство активно ездит на извилистых дорогах и т.п. и выполняет стабильные повороты; комфортный режим предполагает, что качество езды приоритезируется, например, во время начала движения транспортного средства на низкой скорости; режим движения по шоссе предполагает, что транспортное средство движется на высокой скорости на шоссе и т.п. с множеством прямых путей.
В стандартном режиме, тогда как управление подвеской Skyhook выполняется посредством модуля 33a управления подвеской Skyhook, приоритет предоставляется управлению подавлением вибрации неподрессоренной массы или управлению демпфированием посредством модуля 34 управления демпфированием неподрессоренной массы.
В спортивном режиме, тогда как управление входными воздействиями от водителя посредством модуля 31 управления входными воздействиями от водителя приоритезируется, выполняются управление подвеской Skyhook посредством модуля 33a управления подвеской Skyhook и управление демпфированием неподрессоренной массы посредством модуля 34 управления демпфированием неподрессоренной массы.
В комфортном режиме, управление демпфированием неподрессоренной массы посредством модуля 34 управления демпфированием неподрессоренной массы приоритезируется в то время, как выполняется частотно-чувствительное управление посредством модуля 33b частотно-чувствительного управления.
В режиме движения по шоссе, тогда как управление входными воздействиями от водителя посредством модуля 31 управления входными воздействиями от водителя приоритезируется, также выполняется управление, в котором величина управления, полученная посредством управления демпфированием неподрессоренной массы, выполняемого посредством модуля 34 управления демпфированием неподрессоренной массы, суммируется с величиной управления, полученной посредством управления подвеской Skyhook, выполняемого посредством модуля 33a управления подвеской Skyhook.
Арбитраж степеней насыщения в каждом из этих режимов описывается далее.
АРБИТРАЖ В СТАНДАРТНОМ РЕЖИМЕ
Фиг. 19 является блок-схемой последовательности операций способа, показывающей процесс арбитража степени насыщения, выполняемый в стандартном режиме в первом варианте осуществления.
На этапе S1, выполняется определение в отношении того, превышает или нет коэффициент k2 степени насыщения стабилизации состояния с использованием S/A коэффициент k4 демпфирования неподрессоренной массы. Когда k2 превышает k4, процесс переходит к этапу S4, чтобы задавать k2 в качестве степени насыщения.
На этапе S2 отношение скалярной величины области ощущений дрожания вычисляется на основе скалярных величин соответствующей области ощущений мягкости, области ощущений жесткости и области ощущений дрожания, описанных выше касательно модуля 33b частотно-чувствительного управления.
На этапе S3, выполняется определение в отношении того, равно или превышает либо нет отношение области ощущений дрожания заданное значение. Когда отношение равно или превышает заданное значение, процесс переходит к этапу S4, чтобы задавать k2, которое является меньшим значением, в качестве степени насыщения, поскольку существует такая проблема, что высокочастотная вибрация может ухудшать комфорт во время езды. С другой стороны, когда отношение области ощущений дрожания ниже заданного значения, процесс переходит к этапу S5, чтобы задавать k4 в качестве степени насыщения, поскольку маловероятна такая проблема, что высокая степень насыщения снижает качество езды вследствие высокочастотных вибраций.
Как описано выше, в стандартном режиме, управление подавлением вибрации неподрессоренной массы, которое подавляет резонанс неподрессоренной массы, в общем, приоритезируется. Тем не менее, когда демпфирующая сила, требуемая посредством управления подвеской Skyhook, равна или ниже демпфирующей силы, требуемой посредством управления подавлением вибрации неподрессоренной массы, и затем, когда отношение области ощущений дрожания является большим, демпфирующая сила посредством управления подвеской Skyhook задается таким образом, чтобы не допускать понижения характеристик подавления высокочастотной вибрации, которое вызывается посредством удовлетворения требованиям из управления подавлением вибрации неподрессоренных масс. Таким образом, оптимальная характеристика демпфирования может быть получена согласно состояниям движения, снижение качества езды вследствие высокочастотных вибраций может не допускаться при предоставлении возможности водителю ощущать то, что кузов транспортного средства расположен горизонтально.
АРБИТРАЖ В СПОРТИВНОМ РЕЖИМЕ
Фиг. 20 является блок-схемой последовательности операций способа, показывающей процесс арбитража коэффициентов демпфирования, выполняемый в спортивном режиме в первом варианте осуществления.
На этапе S11 коэффициенты распределения демпфирующей силы вычисляются для соответствующих четырех колес на основе степени k1 насыщения входных воздействий от водителя каждого из четырех колес, заданной посредством управления входными воздействиями от водителя. Коэффициенты xfr, xfl, xrr и xrl распределения демпфирующей силы соответствующих колес вычисляются следующим образом, когда степень насыщения входных воздействий от водителя для переднего правого колеса обозначается посредством k1fr, степень насыщения входных воздействий от водителя для переднего левого колеса обозначается посредством k1fl, степень насыщения входных воздействий от водителя для заднего правого колеса обозначается посредством k1rr, и степень насыщения входных воздействий от водителя для заднего левого колеса обозначается посредством k1rl, соответственно:
xfr=k1fr/(k1fr+k1fl+k1rr+k 1rl)
xfl=k1fl/(k1fr+k1fl+k1rr+k 1rl)
xrr=k1rr/(k1fr+k1fl+k1rr+k 1rl)
xrl=k1rl/(k1fr+k1fl+k1rr+k 1rl)
На этапе S12, выполняется определение в отношении того, находятся или нет коэффициенты x распределения демпфирующей силы в пределах заданного диапазона (больше α и меньше β). Когда все коэффициенты x находятся в пределах заданного диапазона, определяется то, что распределение является примерно одинаковым для колес, и управление переходит к этапу S13. Когда обнаружено, что любой из коэффициентов x находится за пределами заданного диапазона, управление переходит к этапу S16.
На этапе S13, выполняется определение в отношении того, превышает или нет коэффициент k4 демпфирования для подавления вибрации неподрессоренной массы коэффициент k1 демпфирования входных воздействий от водителя. Когда k4 превышает k1, управление переходит к этапу S15, чтобы задавать k4 в качестве первой степени k насыщения. С другой стороны, когда k4 равен или меньше k1, управление переходит к этапу S14, чтобы задавать k1 в качестве первой степени k насыщения.
На этапе S16, выполняется определение в отношении того, составляет или нет степень k4 насыщения подавления вибрации или демпфирования неподрессоренной массы максимальное значение (max), задаваемое посредством S/A 3. Управление переходит к этапу S17, когда k4 является максимальным значением (max), и если нет, управление переходит к этапу S18.
На этапе 17, выполняется вычисление, в котором максимальное значение степени k1 насыщения входных воздействий от водителя четырех колес представляет собой коэффициент k4 демпфирования неподрессоренной массы, и степень насыщения, удовлетворяющая коэффициенту распределения демпфирующей силы, задается равной первой степени k насыщения. Другими словами, вычисляется степень насыщения, которая является наибольшей, но при этом находится в пределах заданного диапазона коэффициентов распределения демпфирующей силы.
На этапе S18, степень насыщения, при которой все коэффициенты k1 демпфирования входных воздействий от водителя четырех колес превышают k4 и которая по-прежнему удовлетворяет коэффициенту распределения демпфирующей силы, вычисляется как первая степень k насыщения. Другими словами, вычисляется значение, которое удовлетворяет коэффициенту распределения демпфирующей силы, заданному посредством управления входными воздействиями от водителя, и которое дополнительно удовлетворяет запросу посредством управления демпфированием неподрессоренной массы.
На этапе S19, выполняется определение в отношении того, меньше или нет первая степень k насыщения, заданная на каждом вышеприведенном этапе, степени k2 насыщения стабилизации состояния с использованием S/A, заданной посредством управления подвеской Skyhook. Когда определяется то, что k меньше k2, что означает то, что степень насыщения, требуемая посредством управления подвеской Skyhook, больше, управление переходит к этапу S20, чтобы задавать k2 в качестве конечной степени насыщения. Когда k равно или превышает k2, управление переходит к этапу S21, чтобы задавать k в качестве конечной степени насыщения.
Как описано выше, в спортивном режиме, управление подавлением вибрации неподрессоренной массы, которое подавляет резонанс неподрессоренной массы, приоритезируется в принципе. Тем не менее, поскольку коэффициент распределения демпфирующей силы, требуемый посредством управления входными воздействиями от водителя, тесно связан с стабилизацией состояния кузова транспортного средства и находится в тесной связи с изменением поля зрения водителя, в частности, наивысший приоритет предоставляется обеспечению коэффициента распределения демпфирующей силы, а не непосредственно степени насыщения, которая требуется посредством стороны управления входными воздействиями от водителя. Дополнительно, чтобы изменять стабилизацию состояния кузова транспортного средства при обеспечении коэффициента распределения демпфирующей силы, управление подвеской Skyhook выбирается как "выбрать высоким", так что будет обеспечиваться устойчивая стабилизация состояния кузова транспортного средства.
АРБИТРАЖ В КОМФОРТНОМ РЕЖИМЕ
Фиг. 21 является блок-схемой последовательности операций способа, показывающей процесс арбитража степени насыщения, выполняемый в комфортном режиме в первом варианте осуществления.
На этапе S30, выполняется определение в отношении того, превышает или нет частотно-чувствительная степень k3 насыщения степень k4 насыщения демпфирования неподрессоренной массы. Когда k4 превышает k3, управление переходит к этапу S32, чтобы задавать частотно-чувствительную степень k3 насыщения. С другой стороны, когда k3 равен или меньше k4, управление переходит к этапу S32, чтобы задавать степень k4 насыщения неподрессоренной массы.
Как описано выше, в комфортном режиме, управление подавлением вибрации неподрессоренной массы, которое подавляет резонанс неподрессоренной массы, в общем, приоритезируется. Поскольку частотно-чувствительное управление выполняется первоначально в качестве управления подавлением вибрации подрессоренной массы, чтобы за счет этого задавать оптимальную степень насыщения в соответствии с дорожными условиями, осуществляется управление, которое позволяет обеспечивать комфорт во время езды при недопущении ощущения недостаточного контакта с землей вследствие колебания неподрессоренного элемента или массы посредством управления демпфированием неподрессоренной массы. Следует отметить, что, в комфортном режиме, аналогично стандартному режиму, коэффициент демпфирования может переключаться согласно отношению частотной скалярной величины в области ощущений дрожания. Таким образом, может предоставляться суперкомфортный режим с еще лучшим комфортом во время езды.
АРБИТРАЖ В РЕЖИМЕ ДВИЖЕНИЯ ПО ШОССЕ
Фиг. 22 является блок-схемой последовательности операций способа, показывающей процесс арбитража степени насыщения, выполняемый в режиме движения по шоссе в первом варианте осуществления. Процесс этапов S11-S18 является идентичным процессу арбитража в спортивном режиме, и описание, следовательно, опускается.
На этапе S40, степень k2 насыщения стабилизации состояния с использованием S/A, заданная посредством управления подвеской Skyhook, суммируется с первой степенью k насыщения, полученной посредством арбитражного процесса, выполняемого на этап S18, и выводится значение, полученное таким способом.
Как описано выше, в режиме движения по шоссе, арбитраж степени насыщения выполняется с использованием значения, полученного посредством суммирования степени k2 насыщения стабилизации состояния с использованием S/A с первой степенью k насыщения после арбитража. Далее описывается работа в отношении чертежа. Фиг. 23 является временной диаграммой, показывающей изменение степени насыщения для транспортного средства, движущегося на волнистой дороге и ухабистой дороге. Например, предположим, что транспортное средство испытывает относительно низкочастотное движение кузова транспортного средства при движении на волнистом шоссе. Если используется только управление подвеской Skyhook для того, чтобы подавлять такое движение, существует потребность определять точное изменение скорости вращения колес. Следовательно, усиление контура управления подвеской Skyhook должно задаваться очень высоким. В этом случае, движение относительно низкой частоты может подавляться, но если транспортное средство движется на ухабистой дороге, большое усиление контура управления может приводить к чрезмерному управлению демпфирующей силой. Это приводит к проблемам в смысле понижения комфорта во время езды и/или ухудшения стабилизации состояния кузова транспортного средства.
Напротив, поскольку первая степень k насыщения задается постоянной в режиме движения по шоссе, всегда обеспечивается определенный уровень демпфирующей силы. Таким образом, даже когда степень насыщения посредством управления подвеской Skyhook является небольшой, может подавляться относительно низкочастотное движение кузова транспортного средства. Помимо этого, поскольку нет необходимости в серьезном повышении усиления контура управления подвеской Skyhook, ухабистая дорога может преодолеваться также при нормальном усилении контура управления. Кроме того, поскольку управление подвеской Skyhook выполняется с заданной первой степенью k насыщения, в отличие от ограничения степени насыщения, операция для этапа снижения степени насыщения является возможной в области полуактивного управления, чтобы за счет этого давать возможность устойчивой стабилизации состояния транспортного средства в ходе движения на высокой скорости.
ОБРАБОТКА ВЫБОРА РЕЖИМА
Далее приводится описание процесса выбора режима для выбора режимов движения, описанного выше. Фиг. 24 является блок-схемой последовательности операций способа, показывающей процесс выбора режима в первом варианте осуществления, выполняемый посредством модуля 35b арбитража степени насыщения на основе состояний движения.
На этапе S50, выполняется определение, на основе значения из датчика 7 угла поворота при рулении, в отношении того, движется или нет транспортное средство по прямой. Управление переходит к этапу S51, если транспортное средство движется по прямой, и к этапу S54, если транспортное средство поворачивает.
На этапе S51, выполняется определение, на основе значения из датчика 8 скорости транспортного средства, в отношении того, равно или превышает либо нет значение заданную скорость VSP1 транспортного средства, которая указывает состояние движения на высокой скорости. Если значение датчика равно или превышает VSP1, управление переходит к этапу S52, чтобы выбирать стандартный режим. Если значение датчика меньше VSP1, управление переходит к этапу S53, чтобы выбирать комфортный режим.
На этапе S54, выполняется определение, на основе значения из датчика 8 скорости транспортного средства, в отношении того, равно или превышает либо нет значение заданную скорость VSP1 транспортного средства, которая указывает состояние движения на высокой скорости. Если значение датчика равно или превышает VSP1, управление переходит к этапу S55, чтобы выбирать режим движения по шоссе. Если значение датчика меньше VSP1, управление переходит к этапу S56, чтобы выбирать спортивный режим.
Таким образом, стандартный режим выбирается, когда транспортное средство движется по прямой на высокой скорости. Следовательно, стабилизация состояния кузова транспортного средства стабилизируется посредством управления подвеской Skyhook, и также качество комфорта во время езды обеспечивается посредством подавления вибраций частот в области ощущений жесткости и в области ощущений дрожания. Помимо этого, может подавляться резонанс неподрессоренной массы. Комфортный режим выбирается, когда транспортное средство движется на низкой скорости. Таким образом, резонанс неподрессоренной массы может подавляться при недопущении ввода или приложения к пассажиру вибраций частот в области ощущений жесткости и в области ощущений дрожания в максимально возможной степени.
С другой стороны, режим движения по шоссе выбирается, когда транспортное средство поворачивает и движется на высокой скорости. Таким образом, транспортное средство управляется с использованием значения, полученного посредством прибавления коэффициента демпфирования, и, в общем, может достигаться высокая демпфирующая сила. Таким образом, даже когда транспортное средство движется на высокой скорости, резонанс неподрессоренной массы может подавляться, в то время как стабилизация состояния кузова транспортного средства во время поворота активно обеспечивается посредством управления входными воздействиями от водителя. Спортивный режим выбирается, когда транспортное средство движется на низкой скорости. В силу этого подавляется резонанс неподрессоренной массы в то время, как выполняется управление входными воздействиями от водителя, чтобы активно обеспечивать стабилизацию состояния кузова транспортного средства во время поворота в то время, как выполняется управление подвеской Skyhook надлежащим образом. Таким образом, транспортное средство может двигаться с устойчивой стабилизацией состояния.
Хотя режимы движения автоматически переключаются посредством определения состояния езды или движения транспортного средства в первом варианте осуществления, режим движения может подвергаться переключению посредством переключателя, предоставленного и управляемого водителем. Таким образом, могут получаться комфорт во время езды и поворачиваемость в соответствии с намерением водителя.
ПРОЦЕСС ОГРАНИЧЕНИЯ СТЕПЕНИ НАСЫЩЕНИЯ
Модуль 35b арбитража степени насыщения имеет модуль 35b1 ограничения степени насыщения, который ограничивает степень насыщения арбитража согласно скорости хода. Степень насыщения, которая подвергнута этому процессу арбитража степени насыщения, выводится в модуль 35c преобразования управляющих сигналов. Здесь, приводится описание процесса ограничения степени насыщения. Фиг. 25 является характеристической диаграммой, показывающей взаимосвязь управляющей силы относительно скорости хода в первом варианте осуществления. Скорость хода назначается горизонтальной оси, а управляющая сила назначается вертикальной оси. Относительно характеристик демпфирующей силы S/A 3, характеристика подавления вибрации или демпфирования на самой нижней стороне демпфирующей силы упоминается как мягкая, в то время как характеристика подавления вибрации на самой высокой стороне демпфирующей силы описывается как жесткая. S/A 3 управляет демпфирующей силой посредством изменения характеристики подавления вибрации или демпфирования в пределах диапазона (диапазона регулирования демпфирующей силы), размещенного посередине между жесткой и мягкой линиями. Следует отметить, что управляющая сила является значением, пропорциональным демпфирующей силе, и по мере того, как возрастает демпфирующая сила, управляющая сила, которая должна прикладываться для управления стабилизацией состояния, соответственно, выше. Когда демпфирующая сила меньше, управляющая сила для выполнения управления стабилизацией состояния, соответственно, снижается.
Здесь, S/A 3 имеет только пассивную функцию изменения демпфирующей силы посредством изменения диаметра отверстия, предоставленного в поршне в S/A 3, и в силу этого не показывает активную функцию, чтобы заставлять поршень активно ходить. Следовательно, как показано на характеристической диаграмме по фиг. 25, поскольку демпфирующая сила может прикладываться в направлении подавления скорости хода в первом квадранте (I) и третьем квадранте (III), эти области представляют область, в которой S/A 3 является управляемым. Во втором квадранте (II) и в четвертом квадранте (IV), необходимо выводить силу в направлении формирования хода. Таким образом, эти области представляют область, в которой управление посредством S/A 3 не доступно.
С другой стороны, в случае управления посредством величины управления стабилизацией состояния с использованием двигателя, как описано выше, могут выводиться как крутящий момент приведения в движение за счет двигателя, так и тормозной крутящий момент вследствие торможения двигателем. Таким образом, как показано на характеристической диаграмме по фиг. 25, хотя управляемый диапазон является небольшим, стабилизация состояния подрессоренной массы может быть управляемой в каждом квадранте вокруг почти "нулевой" скорости хода в качестве центральной точки. Ниже приводится описание того, как управление посредством крутящего момента приведения в движение за счет двигателя связано с демпфирующей силой.
С длиной, идущей между точкой центра тяжести транспортного средства к оси L1 передних колес, к оси L2 задних колес, к следу Trdf переднего колеса и к следу Trdr заднего колеса, соответственно, демпфирующая сила, прикладываемая к каждому f колеса (f1 для FL-колеса, f2 для FR-колеса, f3 для RL-колеса и f4 для RR-колеса), требуемая вертикальная колебательная сила Fz, требуемый момент MR крена и требуемый продольный момент MP выражаются в следующем уравнении (5):
Уравнение 5

Таким образом, когда продольный момент вследствие движущей силы преобразуется в силу, прикладываемую к каждому колесу, устанавливается следующая взаимосвязь:
Уравнение 6

С учетом того, что предельное значение задается для величины управления крутящим моментом двигателя, когда вышеуказанная взаимосвязь проиллюстрирована на схеме, показывающей схему демпфирующей силы и скорости хода для одного колеса, контур активного управления указывается в диапазоне ΔS1 низких скоростей хода (например, равном или меньшем 0,05 м/с).
Здесь можно сказать, что при фокусировании на диапазоне ΔS1 низких скоростей хода на фиг. 25, в конфигурации, имеющей только S/A 3, может быть предпочтительным задавать демпфирующую силу, запрашиваемую посредством закона управления подвеской Skyhook. Тем не менее, в результате интенсивного исследования авторов настоящего изобретения обнаружено, что диапазон ΔS1 низких скоростей хода представляет собой диапазон скоростей хода, в котором содержится относительно большое число частотных компонентов, согласно диапазону между 3-6 Гц, в котором все человеческое тело продолжает движение вверх и вниз, и диапазону 6-23 Гц, представляющему частотный диапазон, в котором незначительная и быстрая вибрация передается на часть человеческого тела, например, на бедра пассажира.
Фиг. 26 является характеристической диаграммой, иллюстрирующей взаимосвязь между усилением относительно амплитуды частоты скорости хода и взаимосвязь между амплитудой скорости хода относительно частоты скорости хода в традиционном транспортном средстве, соответственно. На фиг. 26(a), вертикальная ось показывает усиление подрессоренной позиции Z2 в вертикальном направлении относительно позиции Z0 поверхности дороги с тремя характеристиками демпфирования, при этом характеристики демпфирования, соответственно, конфигурируются как мягкие, жесткие и в середине между мягкими и жесткими характеристиками. Вертикальная ось на фиг. 26(b) представляет абсолютную величину амплитуды скорости хода. Во-первых, усиление, показанное на фиг. 26(a), раскрывает, что независимо от характеристик подавления вибрации или демпфирования, резонансная частота подрессоренной массы определяется в пределах 1 Гц, и резонансная частота неподрессоренной массы присутствует около 15 Гц независимо от характеристики демпфирования.
Когда транспортному средству разрешено двигаться во множестве состояний поверхности дороги, недавно принято во внимание, что частотные компоненты скорости хода распределяются так, как показано на фиг. 26(b). Например, в частотной области между 3 Гц и 6 Гц, демонстрируется амплитуда скорости хода, меньшая амплитуды скорости хода при резонансной частоте. Другими словами, в области из области ощущений мягкости или FUWA-области ощущений, амплитуда скорости хода возникает с относительно большой абсолютной величиной приблизительно в 0,3 м/с, тогда как в области ощущений жесткости или HYOKO-области ощущений между 3-6 Гц, амплитуда скорости хода возникает в области ΔS1 низких скоростей хода приблизительно в 0,05 м/с.
По существу, при управлении поведением подрессоренных масс посредством управления подвеской Skyhook независимо от частотной области, также может считаться предпочтительным использовать демпфирующую силу по всей области регулирования демпфирующей силы от мягкой до жесткой в S/A 3. Тем не менее, при увеличении демпфирующей силы в этом диапазоне ΔS1 низких скоростей хода, эффективность передачи вибрации на сторону кузова транспортного средства должна повышаться, что, в свою очередь, должно приводить к ухудшению характеристик подавления высокочастотной вибрации, соответствующих диапазону между 3 и 23 Гц. Помимо этого, в этот частотный диапазон также включается резонансная частота человеческого тела. Таким образом, имеется вероятность того, что комфорт во время езды пассажира ухудшается. Дополнительно, в диапазоне низких скоростей хода, амплитуда скорости хода является низкой. Таким образом, достаточно высокая точность, вероятно, является недоступной посредством управления подвеской Skyhook.
Дополнительно, например, предполагается случай, в котором подрессоренная масса переходит из состояния понижения при определенной скорости хода при сжатии S/A 3 в состояние, в котором подрессоренная масса перемещается в поднятую позицию, т.е. переходит из первого квадранта (I) во второй квадрант (II). Поскольку S/A 3 обладает только пассивной функцией, выводится запрос на переключение из состояния, в котором большая демпфирующая сила задается посредством закона управления подвеской Skyhook, на небольшую демпфирующую силу с величиной управления, равной 0. В это время, сила сжатия пружины, накопленная в S/A 3, сразу прекращает прикладываться в ответ на изменение небольшой величины демпфирующей силы, скорость хода должна изменяться на противоположную в направлении прохождения, и состояние снова переходит в первый квадрант (I). Эти повторяющиеся операции могут осуществляться. Иными словами, большое изменение коэффициента демпфирования (например, диаметра отверстия) за чрезвычайно короткое время не только приводит к автоколебанию, но и это автоколебание может накладывать на резонанс неподрессоренной массы ухудшение свойства держания дороги и комфорта во время езды.
Следовательно, в первом варианте осуществления, когда скорость хода является низкой, степень насыщения задается меньше, чем когда скорость хода является высокой. Таким образом, посредством уменьшения демпфирующей силы на низкой скорости хода, можно подавлять ухудшение характеристик подавления высокочастотной вибрации.
Фиг. 27 является картой ограничения или предела степени насыщения в первом варианте осуществления изобретения.
Ограничение или предел задается так, как показано в характеристике с фиг. 27, так что ограниченное значение степени насыщения задается относительно скорости хода.
В частности, при первой скорости, равной или меньшей 0,05 м/с, степень насыщения задается равной 0% (первое насыщение), при второй скорости, превышающей первую скорость, равной или большей 0,3 м/с, степень насыщения задается равной 100% (второе насыщение), т.е. выше первой степени насыщения. Дополнительно, между 0,05 м/с и 0,3 м/с, степень насыщения представляет переходную степень насыщения, которая варьируется или переходит между 0% и 100%.
Область регулируемого управления демпфирующей силой, заданная посредством степени насыщения в диапазоне ΔS1 низких скоростей хода в 0,05 м/с или меньше, представляющая первую скорость, должна задаваться ближе всего к характеристике демпфирования мягкого свойства (т.е. задается в области, смещенной к характеристикам демпфирования на стороне низкой демпфирующей силы). Другими словами, область регулирования демпфирующей силы, заданная или предписываемая степени насыщения, задается в области, за исключением характеристик демпфирования на стороне высокой демпфирующей силы. Таким образом, можно уменьшать эффективность передачи вибрации на кузов транспортного средства, за счет этого обеспечивая комфорт во время езды. Дополнительно, с увеличением скорости хода, переходная степень насыщения задается с возможностью постепенно увеличивать управляемую область, ближайшую к характеристикам демпфирования, представляющим жесткие характеристики. Таким образом, при подавлении передачи вибрации на сторону кузова транспортного средства, можно стабилизировать поведение подрессоренных масс. При дополнительном увеличении скорости хода, поскольку 100% должны задаваться в качестве второй степени насыщения, можно стабилизировать поведение подрессоренных масс посредством полной демонстрации рабочих характеристик S/A 3. Следует отметить, что, в качестве альтернативного способа, например, когда скорость хода позиционируется в диапазоне ΔS1 низких скоростей хода, должен фиксированно использоваться наибольший диаметр отверстия, представляющий наименьшую демпфирующую силу. Альтернативно, наибольшее и второе наибольшее отверстия могут избирательно использоваться для управления демпфирующей силой.
Таким образом, даже при ограничении демпфирующей силы небольшой в диапазоне ΔS1 низких скоростей хода, диапазон ΔS1 низких скоростей хода представляет область, в которой подрессоренное состояние может быть стабилизировано посредством активного управления посредством управления стабилизацией состояния с использованием двигателя. Следовательно, даже если величина управления демпфирующей силой посредством S/A 3 уменьшается, можно достигать устойчивого подрессоренного устойчивого управления относительно всего транспортного средства. Следует отметить, что в первом варианте осуществления, поскольку степень насыщения задается в области, смещенной к стороне низкой демпфирующей силы, низкая демпфирующая сила сконфигурирована с возможностью формирования, так что может уменьшаться вибрационная трансляция пассажиру при вводе вибрации в HYOKO-области или области ощущений жесткости, чтобы за счет этого улучшать рабочие характеристики комфорта во время езды.
Дополнительно, в первом варианте осуществления, вычисление величины управления стабилизацией состояния с использованием двигателя выполняется независимо на основе скорости вращения колес. Аналогично, вычисление величины управления стабилизацией состояния с использованием S/A выполняется независимо на основе скорости вращения колес.
Следовательно, даже если эти величины используются для того, чтобы управлять управлением стабилизацией состояния подрессоренной массы независимо друг от друга, то управление должно выполняться через скорость вращения колес транспортного средства. Как результат, поведение подрессоренной массы должно управляться совместно. При уменьшении величины управления стабилизацией состояния с использованием S/A при одновременном ограничении величины управления подвеской Skyhook при необходимости, управление стабилизацией состояния подрессоренной массы может выполняться надлежащим образом посредством управления стабилизацией состояния с использованием двигателя без вызывания взаимных помех и необходимости отслеживать друг друга. Эта взаимосвязь является истинной также относительно величины управления стабилизацией состояния с использованием тормоза, описанной выше.
Следует отметить, что в первом варианте осуществления 1, как показано на фиг. 27, ограниченное значение степени насыщения задается равным 0% в диапазоне низких скоростей хода, чтобы фиксированно задавать по существу мягкие характеристики. Тем не менее, с учетом недопущения нестабильного управления подвеской Skyhook, управление необязательно задается как мягкие характеристики, а задается в качестве достаточно небольшого значения в качестве значения насыщения, чтобы ограничивать выбираемые характеристики демпфирования. Альтернативно, вместо фиксированного задания как мягких характеристик, степень насыщения может быть ограничена областью, немного смещенной к стороне жестких характеристик, а не к мягким характеристикам.
Фиг. 28 является картой ограничения степени насыщения в другом варианте осуществления. Следует принимать во внимание, что в диапазоне низких скоростей хода, посредством задания избирательной области степени насыщения как заданной области, смещенной к коэффициенту демпфирования на стороне более низкой демпфирующей силы, даже в диапазоне низких скоростей хода, обеспечивается определенная степень демпфирующей силы, и может быть реализована дополнительная стабилизация поведения подрессоренной массы при незначительном снижении комфорта во время езды. Таким образом, относительно ограничения степени насыщения, могут рассматриваться различные шаблоны. Тем не менее, конкретные ограничения не накладываются в этой связи.
Дополнительно, предусмотрена конфигурация с возможностью ограничивать степень насыщения после арбитража или регулирования посредством карты ограничения степени насыщения, предварительно установленной в первом варианте осуществления. Альтернативно, коэффициент демпфирования может быть сконфигурирован с возможностью вычисления в ограниченной форме в модуле 33a управления подвеской Skyhook. Затем степень насыщения вычисляется, чтобы формировать ограниченное значение степени насыщения на основе ограниченного коэффициента демпфирования. В этом случае, только значение, соответствующее конкретному коэффициенту демпфирования, вычисляется как степень насыщения, так что ситуация отличается от карты ограничения степени насыщения, представляющей область регулирования демпфирующей силы. Тем не менее, обе конфигурации фактически являются идентичными.
ПРОЦЕСС СНЯТИЯ ОГРАНИЧЕНИЯ СТЕПЕНИ НАСЫЩЕНИЯ
Далее приводится описание процесса снятия ограничения степени насыщения. Как описано выше, в диапазоне низкой скорости хода, посредством задания предела или ограничения степени насыщения, достигается как стабилизация поведения транспортного средства, так и повышение комфорта во время езды. Тем не менее, необходимо обеспечивать начальную демпфирующую силу, когда транспортное средство поворачивает.
В частности, считается, что поведение при крене подрессоренной массы стабилизируется наиболее эффективно посредством S/A 3. Таким образом, необходимо подавлять формирование чрезмерного крена посредством обеспечения достаточной демпфирующей силы даже в ситуациях, в которых скорость хода является низкой.
Следовательно, в случае поворота, т.е. когда прогнозируется поворот транспортного средства, и возникает угловая скорость крена, ограничение степени насыщения, описанное выше, сконфигурировано с возможностью снятия или исключения. Таким образом, модуль 35b1 ограничения степени насыщения снимает ограничение степени насыщения в ответ на угловую скорость крена, определенную посредством модуля 35b2 определения угловой скорости крена. Следовательно, можно увеличивать демпфирующую силу в начальном состоянии движения на повороте, чтобы за счет этого подавлять формирование чрезмерного крена.
Следует отметить, что для того, чтобы определять угловую скорость крена в варианте осуществления, также можно прогнозировать возникновение угловой скорости крена из взаимосвязи между скоростью транспортного средства и углом поворота при рулении. Дополнительно, в транспортном средстве, которое захватывает изображение впереди транспортного средства посредством камеры и т.п., поскольку поворот может быть прогнозирован из формы поверхности дороги, в ситуации, в которой поворот является прогнозируемым до фактического возникновения поворота, задание предела или ограничение степени насыщения может быть сконфигурировано с возможностью снятия.
Как описано выше, первый вариант осуществления предлагает нижеупомянутые функциональные преимущества.
(1) Предусмотрены:
- первый модуль 100 оценки состояния движения, второй модуль 200 оценки состояния движения и третий модуль 32 оценки состояния движения (средство определения поведения подрессоренной массы), которые определяют изменение в поведении подрессоренной массы транспортного средства;
- двигатель 1 (источник мощности), который выводит движущую силу на основе управления движущей силой, чтобы подавлять изменение в поведении подрессоренной массы;
- S/A 3 (амортизатор с регулируемой демпфирующей силой), который выводит демпфирующую силу на основе управления демпфирующей силой, чтобы подавлять изменение в поведении подрессоренной массы;
- третий модуль 32 оценки состояния движения (средство определения скорости хода), которое определяет скорость хода S/A 3; и
- модуль 33a управления подвеской Skyhook и модуль 35b1 ограничения степени насыщения (средство вычисления величины управления демпфирующей силой), которые вычисляют величину управления демпфирующей силой на основе управления демпфирующей силой в пределах диапазона области регулирования демпфирующей силы, предписываемой посредством степени насыщения, при этом степень насыщения области регулирования демпфирующей силы амортизатора с регулируемой демпфирующей силой задается ниже, когда скорость хода равна заданному значению или меньше, чем когда скорость хода превышает заданное значение, при этом, по меньшей мере, когда скорость хода равна заданному значению или меньше, двигатель 1 сконфигурирован с возможностью выводить движущую силу на основе управления движущей силой, и S/A 3 сконфигурирован с возможностью выводить демпфирующую силу, соответствующую величине управления демпфирующей силой, вычисленной посредством модуля 33a управления подвеской Skyhook и модуля 35b1 ограничения степени насыщения, чтобы за счет этого подавлять изменение в поведении подрессоренной массы.
Следовательно, когда скорость хода равна или меньше заданного значения, посредством сужения области регулирования демпфирующей силы и ограничения управления демпфирующей силой, может подавляться необязательное управление демпфирующей силой. Дополнительно, когда скорость хода превышает заданное значение, посредством расширения области регулирования демпфирующей силы для выполнения управления демпфирующей силой, стабилизация состояния транспортного средства может быть стабилизирована в достаточной степени независимо от диапазона скоростей хода.
Помимо этого, в области, в которой степень насыщения задается низкой, посредством выполнения управления движущей силой посредством двигателя, который допускает выполнение активного управления, может обеспечиваться стабильность всего транспортного средства.
(2) Предусмотрены:
- первый модуль 100 оценки состояния движения, второй модуль 200 оценки состояния движения и третий модуль 32 оценки состояния движения (средство определения поведения подрессоренной массы), которые определяют изменение в поведении подрессоренной массы транспортного средства;
- двигатель 1 (источник мощности), который выводит движущую силу на основе управления движущей силой, чтобы подавлять изменение в поведении подрессоренной массы;
- S/A 3 (амортизатор с регулируемой демпфирующей силой), который выводит демпфирующую силу на основе управления демпфирующей силой, чтобы подавлять изменение в поведении подрессоренной массы;
- третий модуль 32 оценки состояния движения (средство определения скорости хода), которое определяет скорость хода S/A 3; и
- модуль 33a управления подвеской Skyhook и модуль 35b1 ограничения степени насыщения (средство вычисления величины управления демпфирующей силой), которые вычисляют величину управления демпфирующей силой на основе управления демпфирующей силой в пределах диапазона области регулирования демпфирующей силы, предписываемой посредством степени насыщения, при этом степень насыщения области регулирования демпфирующей силы амортизатора с регулируемой демпфирующей силой задается ниже, когда скорость хода равна заданному значению или меньше, чем когда скорость хода превышает заданное значение, при этом область регулирования демпфирующей силы, предписываемая степени насыщения при скорости хода, равной заданному значению или меньше, смещается в области к характеристикам силы демпфирования на стороне низкой демпфирующей силы, причем, по меньшей мере, когда скорость хода равна заданному значению или меньше, двигатель 1 сконфигурирован с возможностью выводить движущую силу на основе управления движущей силой, и S/A 3 сконфигурирован с возможностью выводить демпфирующую силу, соответствующую величине управления демпфирующей силой, вычисленной посредством модуля 33a управления подвеской Skyhook и модуля 35b1 ограничения степени насыщения, чтобы за счет этого подавлять изменение в поведении подрессоренной массы.
Следовательно, когда скорость хода равна или меньше заданного значения, посредством сужения области регулирования демпфирующей силы и ограничения управления демпфирующей силой, может подавляться необязательное управление демпфирующей силой. Дополнительно, когда скорость хода превышает заданное значение, посредством расширения области регулирования демпфирующей силы для выполнения управления демпфирующей силой, стабилизация состояния транспортного средства может быть стабилизирована в достаточной степени независимо от диапазона скоростей хода. Дополнительно, поскольку область регулирования демпфирующей силы задается в области, смещенной к характеристикам демпфирования на стороне низкой демпфирующей силы, можно не допускать ухудшения комфорта во время езды даже при вводе высокочастотных вибраций.
Помимо этого, в области, в которой степень насыщения задается низкой, посредством выполнения управления движущей силой посредством двигателя, который допускает выполнение активного управления, может обеспечиваться стабильность всего транспортного средства.
(3) Демпфирующая сила, сформированная посредством характеристик демпфирования на стороне низкой демпфирующей силы при произвольной скорости хода, сконфигурирована так, чтобы быть меньше демпфирующей силы, сформированной посредством характеристик демпфирования на стороне высокой демпфирующей силы. Таким образом, даже при вводе высокочастотных вибраций, комфорт во время езды может обеспечиваться вследствие низкой демпфирующей силы.
(4) Предусмотрены:
- первый модуль 100 оценки состояния движения, второй модуль 200 оценки состояния движения и третий модуль 32 оценки состояния движения (средство определения поведения подрессоренной массы), которые определяют изменение в поведении подрессоренной массы транспортного средства;
- двигатель 1 (источник мощности), который выводит движущую силу на основе управления движущей силой, чтобы подавлять изменение в поведении подрессоренной массы;
- S/A 3 (амортизатор с регулируемой демпфирующей силой), который выводит демпфирующую силу на основе управления демпфирующей силой, чтобы подавлять изменение в поведении подрессоренной массы;
- третий модуль 32 оценки состояния движения (средство определения скорости хода), которое определяет скорость хода S/A 3; и
- модуль 33a управления подвеской Skyhook и модуль 35b1 ограничения степени насыщения (средство вычисления величины управления демпфирующей силой), которые вычисляют величину управления демпфирующей силой на основе управления демпфирующей силой в пределах диапазона области регулирования демпфирующей силы, предписываемой степени насыщения, при этом степень насыщения области регулирования демпфирующей силы амортизатора с регулируемой демпфирующей силой задается ниже, когда скорость хода равна или меньше заданного значения, чем степень насыщения, когда скорость хода превышает заданное значение, причем область регулирования демпфирующей силы, предписываемая посредством степени насыщения, когда скорость хода равна или меньше заданного значения, задается в области, за исключением характеристик демпфирования на стороне высокой демпфирующей силы, при этом, по меньшей мере, когда скорость хода равна заданному значению или меньше, двигатель 1 сконфигурирован с возможностью выводить движущую силу на основе управления движущей силой, и S/A 3 сконфигурирован с возможностью выводить демпфирующую силу, соответствующую величине управления демпфирующей силой, вычисленной посредством модуля 33a управления подвеской Skyhook и модуля 35b1 ограничения степени насыщения, чтобы за счет этого подавлять изменение в поведении подрессоренной массы.
Следовательно, когда скорость хода равна или меньше заданного значения, посредством сужения области регулирования демпфирующей силы и ограничения управления демпфирующей силой, может подавляться необязательное управление демпфирующей силой. Дополнительно, когда скорость хода превышает заданное значение, посредством расширения области регулирования демпфирующей силы для выполнения управления демпфирующей силой, стабилизация состояния транспортного средства может быть стабилизирована в достаточной степени независимо от диапазона скоростей хода. Дополнительно, поскольку область регулирования демпфирующей силы задается в области, за исключением характеристик демпфирования на стороне высокой демпфирующей силы, можно не допускать ухудшения комфорта во время езды даже при вводе высокочастотных вибраций.
Помимо этого, в области, в которой степень насыщения задается низкой, посредством выполнения управления движущей силой посредством двигателя, который допускает выполнение активного управления, может обеспечиваться стабильность всего транспортного средства.
(5) Демпфирующая сила, сформированная согласно характеристикам демпфирования на стороне высокой демпфирующей силы при произвольной скорости хода, сконфигурирована так, чтобы превышать демпфирующую силу, сформированную согласно характеристикам демпфирования на стороне низкой демпфирующей силы. Таким образом, даже при вводе высокочастотных вибраций, комфорт во время езды может обеспечиваться вследствие низкой демпфирующей силы.
(6) Предусмотрены:
- первый модуль 100 оценки состояния движения, второй модуль 200 оценки состояния движения и третий модуль 32 оценки состояния движения (средство определения поведения подрессоренной массы), которые определяют изменение в поведении подрессоренной массы транспортного средства;
- двигатель 1 (источник мощности), который выводит движущую силу на основе управления движущей силой, чтобы подавлять изменение в поведении подрессоренной массы;
- S/A 3 (амортизатор с регулируемой демпфирующей силой), который выводит демпфирующую силу на основе управления демпфирующей силой, чтобы подавлять изменение в поведении подрессоренной массы;
- третий модуль 32 оценки состояния движения (средство определения скорости хода), которое определяет скорость хода S/A 3 на основе скорости вращения колес транспортного средства; и
- модуль 33a управления подвеской Skyhook и модуль 35b1 ограничения степени насыщения (средство вычисления величины управления демпфирующей силой), которые вычисляют величину управления демпфирующей силой на основе управления демпфирующей силой в пределах диапазона области регулирования демпфирующей силы, предписываемой посредством степени насыщения, причем степень насыщения области регулирования демпфирующей силы амортизатора с регулируемой демпфирующей силой задается ниже, при скорости хода, равной заданному значению или меньше, степени насыщения, когда скорость хода превышает заданное значение, при этом, по меньшей мере, когда скорость хода равна заданному значению или меньше, двигатель 1 сконфигурирован с возможностью выводить движущую силу на основе управления движущей силой, и S/A 3 сконфигурирован с возможностью выводить демпфирующую силу, соответствующую величине управления демпфирующей силой, вычисленной посредством модуля 33a управления подвеской Skyhook и модуля 35b1 ограничения степени насыщения, чтобы за счет этого подавлять изменение в поведении подрессоренной массы.
Следовательно, когда скорость хода равна или меньше заданного значения, посредством сужения области регулирования демпфирующей силы и ограничения управления демпфирующей силой, может подавляться необязательное управление демпфирующей силой. Дополнительно, когда скорость хода превышает заданное значение, посредством расширения области регулирования демпфирующей силы для выполнения управления демпфирующей силой, стабилизация состояния транспортного средства может быть стабилизирована в достаточной степени независимо от диапазона скоростей хода. Дополнительно, при определении скорости хода на основе скорости вращения колес транспортного средства, экономически эффективная конфигурация может достигаться без необходимости затратного датчика. Следует отметить, что при определении скорости хода с использованием скорости вращения колес, поскольку амплитуда скорости хода является небольшой в диапазоне низких скоростей хода, не может полностью обеспечиваться точность при управлении подвеской Skyhook. В этом отношении, поскольку степень насыщения в диапазоне низких скоростей хода задается небольшой, даже при ухудшении характеристик точности при управлении подвеской Skyhook, не допускается чрезмерно ошибочный вывод, так что будет обеспечиваться стабильность транспортного средства.
Помимо этого, в области, в которой степень насыщения задается низкой, посредством выполнения управления движущей силой посредством двигателя, который допускает выполнение активного управления, может обеспечиваться стабильность всего транспортного средства.
(7) Предусмотрен модуль 300 вычисления опорной скорости вращения колес (средство вычисления опорной скорости вращения колес), содержащий:
- модуль 301 извлечения компонента плоского движения (первый модуль вычисления), в котором первые скорости V0FL, V0FR, V0RL и V0RR вращения колес в качестве опорной скорости вращения колес каждого колеса вычисляются на основе модели вида сверху кузова транспортного средства, принимающей значения датчика скорости вращения колес в качестве ввода;
- модуль 302 исключения возмущений при крене (второй модуль вычисления), в котором вторая скорость V0F, V0R вращения колес, представляющая опорную скорость вращения колес передних и задних колес на основе модели вида спереди транспортного средства, принимающей первые скорости V0FL, V0FR, V0RL, V0RR вращения колес в качестве ввода;
- модуль 303 исключения возмущений при продольном движении относительно поперечной оси (третий модуль вычисления), в котором третьи скорости VbFL, VbFR, VbRL и VbRR вращения колес вычисляются на основе модели вида сбоку кузова транспортного средства, принимающей вторую скорость вращения передних колес, скорость V0F, V0R вращения задних колес в качестве ввода;
- модуль 30 перестановки передних и задних колес (четвертый модуль вычисления), в котором четвертая скорость VbFL, VbFR, VbRL и VbRR вращения колес в качестве опорных скоростей вращения колес каждого колеса вычисляется на основе модели вида сверху кузова транспортного средства, принимающей переключенные значения между вторыми скоростями V0F, V0R вращения передних колес и задних колес в качестве ввода;
- модуль 306 переключения скорости вращения колес, который принимает третьи скорости VbFL, VbFR, VbRL, VbRR вращения колес и четвертые скорости VbFL, VbFR, VbRL и VbRR вращения колес и выводит третьи скорости VbFL, VbFR, VbRL, VbRR вращения колес, когда скорость транспортного средства меньше заданной скорости транспортного средства, при выводе четвертой скорости VbFL, VbFR, VbRL, VbRR вращения колес, когда скорость транспортного средства равна или превышает заданную скорость транспортного средства; и
- модуль 304 перераспределения или повторного выделения опорной скорости вращения колес (средство вычисления опорной скорости вращения колес), который вычисляет опорную скорость δ0 вращения колес на основе модели вида сверху кузова транспортного средства, принимающей третьи скорости VbFL, VbFR, VbRL, VbRR вращения колес или четвертые скорости VbFL, VbFR, VbRL, VbRR вращения колес, выводимые из модуля 306 переключения скорости вращения колес, в качестве вводов, при этом:
- третий модуль 32 оценки состояния движения сконфигурирован с возможностью оценивать скорость хода S/A 3 на основе разности между значениями датчиков, определенными посредством датчика 5 скорости вращения колес, и опорной скоростью транспортного средства (модуль 321c GEO-преобразования).
Таким образом, в ходе движения на низкой скорости транспортного средства, посредством использования трех моделей для того, чтобы вычислять возмущения исключения опорной скорости вращения колес, скорость хода может оцениваться с хорошей точностью, чтобы за счет этого улучшать управление вибрацией.
Дополнительно, в ходе движения на высокой скорости, посредством принятия скорости вращения задних колес в качестве опорной скорости вращения колес переднего колеса, может опускаться этап для исключения продольных возмущений, чтобы за счет этого обеспечивать чувствительность при управлении вибрацией.
(8) Модуль 322 вычисления скорости подрессоренной массы оценивает скорость подрессоренной массы посредством использования четырехколесной модели, сконструированной на основе члена вертикального колебательного движения, представляющего вертикальное движение четырех колес, члена продольного движения относительно поперечной оси, представляющего вертикальное движение передних колес и задних колес, члена крена, представляющего вертикальное движение левых колес и правых колес, и члена отклонения от вертикали, представляющего вертикальное движение каждой пары диагональных колес.
Более конкретно, при конструировании четырехколесной модели из скорости хода каждого колеса, при попытке разлагать по собственным формам на скорость подрессоренной массы, угловую скорость крена, угловую скорость продольного движения относительно поперечной оси и угловую скорость вертикального колебательного движения, один соответствующий компонент является недостаточным для того, чтобы делать решение нестабильным.
Таким образом, посредством введения угловой скорости отклонения от вертикали, представляющей движение диагональных колес, чтобы предоставлять возможность вычислять каждый компонент скорости подрессоренной массы.
(9) Предусмотрены:
- первый модуль 100 оценки состояния движения, второй модуль 200 оценки состояния движения и третий модуль 32 оценки состояния движения (средство определения поведения подрессоренной массы), которые определяют изменение в поведении подрессоренной массы транспортного средства;
- двигатель 1 (источник мощности), который выводит движущую силу на основе управления движущей силой, чтобы подавлять изменение в поведении подрессоренной массы;
- S/A 3 (амортизатор с регулируемой демпфирующей силой), который выводит демпфирующую силу на основе управления демпфирующей силой, чтобы подавлять изменение в поведении подрессоренной массы;
- третий модуль 32 оценки состояния движения (средство определения скорости хода), которое определяет скорость хода S/A 3; и
- модуль 33a управления подвеской Skyhook и модуль 35b1 ограничения степени насыщения (средство вычисления величины управления демпфирующей силой), которые вычисляют величину управления демпфирующей силой на основе управления демпфирующей силой в пределах диапазона области регулирования демпфирующей силы, предписываемой посредством степени насыщения, при этом степень насыщения области регулирования демпфирующей силы амортизатора с регулируемой демпфирующей силой задается ниже по мере того, как снижается скорость хода, когда скорость хода равна заданному значению или меньше, при этом, по меньшей мере, когда скорость хода равна заданному значению или меньше, двигатель 1 сконфигурирован с возможностью выводить движущую силу на основе управления движущей силой, и S/A 3 сконфигурирован с возможностью выводить демпфирующую силу, соответствующую величине управления демпфирующей силой, вычисленной посредством модуля 33a управления подвеской Skyhook и модуля 35b1 ограничения степени насыщения, чтобы за счет этого подавлять изменение в поведении подрессоренной массы.
Следовательно, когда скорость хода равна или меньше заданного значения, посредством сужения области регулирования демпфирующей силы и ограничения управления демпфирующей силой, может подавляться необязательное управление демпфирующей силой. Дополнительно, поскольку степень насыщения задается ниже по мере того, как снижается скорость хода, может достигаться более стабильное поведение транспортного средства.
Помимо этого, в области, в которой степень насыщения задается низкой, посредством выполнения управления движущей силой посредством двигателя, который допускает выполнение активного управления, может обеспечиваться стабильность всего транспортного средства.
(10) Предусмотрены:
- первый модуль 100 оценки состояния движения, второй модуль 200 оценки состояния движения и третий модуль 32 оценки состояния движения (средство определения поведения подрессоренной массы), которые определяют изменение в поведении подрессоренной массы транспортного средства;
- двигатель 1 (источник мощности), который выводит движущую силу на основе управления движущей силой, чтобы подавлять изменение в поведении подрессоренной массы;
- S/A 3 (амортизатор с регулируемой демпфирующей силой), который выводит демпфирующую силу на основе управления демпфирующей силой, чтобы подавлять изменение в поведении подрессоренной массы;
- третий модуль 32 оценки состояния движения (средство определения скорости хода), которое определяет скорость хода S/A 3; и
- модуль 33a управления подвеской Skyhook и модуль 35b1 ограничения степени насыщения (средство вычисления величины управления демпфирующей силой), которые вычисляют величину управления демпфирующей силой на основе управления демпфирующей силой в пределах диапазона области регулирования демпфирующей силы, предписываемой посредством степени насыщения, причем степень насыщения области регулирования демпфирующей силы S/A 3 задается равной или ниже заданной степени насыщения, когда скорость хода равна или меньше заданного значения, при этом, по меньшей мере, когда скорость хода равна заданному значению или меньше, двигатель 1 сконфигурирован с возможностью выводить движущую силу на основе управления движущей силой, и S/A 3 сконфигурирован с возможностью выводить демпфирующую силу, соответствующую величине управления демпфирующей силой, вычисленной посредством модуля 33a управления подвеской Skyhook и модуля 35b1 ограничения степени насыщения, чтобы за счет этого подавлять изменение в поведении подрессоренной массы.
Следовательно, когда скорость хода равна или меньше заданного значения, посредством сужения области регулирования демпфирующей силы, равной или меньшей заданной степени, и ограничения управления демпфирующей силой, может подавляться необязательное управление демпфирующей силой. Дополнительно, когда скорость хода превышает заданное значение, посредством расширения области регулирования демпфирующей силы для выполнения управления демпфирующей силой, стабилизация состояния транспортного средства может быть стабилизирована в достаточной степени независимо от диапазона скоростей хода.
Помимо этого, в области, в которой степень насыщения задается низкой, посредством выполнения управления движущей силой посредством двигателя, который допускает выполнение активного управления, может обеспечиваться стабильность всего транспортного средства.
(11) Предусмотрены:
- первый модуль 100 оценки состояния движения, второй модуль 200 оценки состояния движения и третий модуль 32 оценки состояния движения (средство определения поведения подрессоренной массы), которые определяют изменение в поведении подрессоренной массы транспортного средства;
- двигатель 1 (источник мощности), который выводит движущую силу на основе управления движущей силой, чтобы подавлять изменение в поведении подрессоренной массы;
- S/A 3 (амортизатор с регулируемой демпфирующей силой), который выводит демпфирующую силу на основе управления демпфирующей силой, чтобы подавлять изменение в поведении подрессоренной массы;
- третий модуль 32 оценки состояния движения (средство определения скорости хода), которое определяет скорость хода S/A 3; и
- модуль 33a управления подвеской Skyhook и модуль 35b1 ограничения степени насыщения (средство вычисления величины управления демпфирующей силой), которые вычисляют величину управления демпфирующей силой на основе управления демпфирующей силой в области регулирования демпфирующей силы, предписываемой степени насыщения, при этом:
- когда скорость хода равна или ниже первой скорости, степень насыщения области регулирования демпфирующей силы амортизатора с регулируемой демпфирующей силой задается равной первой степени насыщения,
- когда скорость хода равна или превышает вторую скорость, превышающую первую скорость, степень насыщения области регулирования демпфирующей силы амортизатора с регулируемой демпфирующей силой задается равной второй степени насыщения,
- когда скорость хода позиционируется между первой скоростью и второй скоростью, степень насыщения области регулирования демпфирующей силы амортизатора с регулируемой демпфирующей силой задается как переходная степень насыщения, которая переходит между первой степенью насыщения и второй степенью насыщения, при этом:
- по меньшей мере, когда скорость хода равна заданному значению или меньше, двигатель 1 сконфигурирован с возможностью выводить движущую силу на основе управления движущей силой, и S/A 3 сконфигурирован с возможностью выводить демпфирующую силу, соответствующую величине управления демпфирующей силой, вычисленной посредством модуля 33a управления подвеской Skyhook и модуля 35b1 ограничения степени насыщения, чтобы за счет этого подавлять изменение в поведении подрессоренной массы.
Следовательно, в диапазоне низких скоростей хода, равном или меньшем первой скорости, посредством задания степени насыщения равной 0%, может уменьшаться эффективность передачи вибрации на кузов транспортного средства, и обеспечивается комфорт во время езды. Дополнительно, когда скорость хода увеличивается и позиционируется между первой скоростью и второй скоростью, переходная степень насыщения должна задаваться таким образом, что, управляемая область должна постепенно расширяться около характеристик демпфирующей силы, имеющих наиболее жесткие характеристики. Таким образом, при подавлении передачи вибрации на кузов транспортного средства, может достигаться стабилизация поведения подрессоренной массы. При дополнительном увеличении скорости хода, поскольку 100% задается в качестве второй степени насыщения, стабилизация поведения подрессоренной массы может достигаться при демонстрации достаточных рабочих характеристик S/A 3.
Помимо этого, в области, в которой степень насыщения задается низкой, посредством выполнения управления движущей силой посредством двигателя, который допускает выполнение активного управления, может обеспечиваться стабильность всего транспортного средства.
(12) Модуль ограничения 35b1 насыщения инструктирует увеличение степени насыщения при повороте. Следовательно, можно подавлять возникновение чрезмерного крена посредством надежного обеспечения демпфирующей силы даже в ситуациях, в которых скорость хода является низкой.
(13) Время поворота включает в себя состояние, в котором прогнозируется поворот до фактического поворота. За счет этого можно, можно увеличивать демпфирующую силу на начальной стадии движения на повороте, чтобы за счет этого подавлять формирование чрезмерного крена.
(14) Модуль 35b2 определения угловой скорости крена (средство определения угловой скорости крена) предоставляется для того, чтобы определять угловую скорость крена транспортного средства, и модуль 35b1 ограничения степени насыщения дает возможность степени насыщения быть более высокой по мере того, как увеличивается определенная угловая скорость крена. В варианте осуществления, после определения угловой скорости крена, ограничение или ограничения на степень насыщения снимаются. Таким образом, можно повышать демпфирующую силу на начальной стадии поворота. Можно увеличивать демпфирующую силу на начальной стадии движения на повороте, чтобы за счет этого подавлять формирование чрезмерного крена.
(15) Когда скорость хода S/A 3 (амортизатора с регулируемой демпфирующей силой), чтобы выполнять управление демпфирующей силой для подавления изменений в поведении подрессоренной массы, равна заданному значению или меньше, степень насыщения области регулирования демпфирующей силы должна задаваться ниже степени насыщения, когда скорость хода превышает заданное значение, так что тогда как управление демпфирующей силой выполняется в пределах диапазона области регулирования демпфирующей силы, предписываемой степени насыщения, выполняется управление движущей силой, чтобы подавлять изменения в поведении подрессоренной массы посредством двигателя 1 (источника мощности).
Следовательно, когда скорость хода равна или меньше заданного значения, посредством сужения области регулирования демпфирующей силы и ограничения управления демпфирующей силой, может подавляться необязательное управление демпфирующей силой. Дополнительно, когда скорость хода превышает заданное значение, посредством расширения области регулирования демпфирующей силы для выполнения управления демпфирующей силой, стабилизация состояния транспортного средства может быть стабилизирована в достаточной степени независимо от диапазона скоростей хода.
Помимо этого, в области, в которой степень насыщения задается низкой, посредством выполнения управления движущей силой посредством двигателя, который допускает выполнение активного управления, может обеспечиваться стабильность всего транспортного средства.
(16) Предусмотрены:
- первый модуль 100 оценки состояния движения, второй модуль 200 оценки состояния движения и третий модуль 32 оценки состояния движения (средство определения поведения подрессоренной массы), которые определяют изменение в поведении подрессоренной массы транспортного средства;
- S/A 3 (амортизатор с регулируемой демпфирующей силой), который выводит демпфирующую силу на основе управления демпфирующей силой, чтобы подавлять изменение в поведении подрессоренной массы;
- третий модуль 32 оценки состояния движения (средство определения скорости хода), которое определяет скорость хода S/A 3; и
- модуль 33a управления подвеской Skyhook и модуль 35b1 ограничения степени насыщения (средство вычисления величины управления демпфирующей силой), которые вычисляют величину управления демпфирующей силой на основе управления демпфирующей силой в пределах диапазона области регулирования демпфирующей силы, предписываемой посредством степени насыщения, причем степень насыщения области регулирования демпфирующей силы амортизатора с регулируемой демпфирующей силой во время невыполнения поворота, и скорость хода равна или меньше заданного значения, ниже степени насыщения, когда скорость хода превышает заданное значение, и область регулирования демпфирующей силы задается в области, смещенной к характеристикам демпфирования на стороне низкой демпфирующей силы.
Следовательно, когда скорость хода равна или меньше заданного значения, посредством сужения области регулирования демпфирующей силы и ограничения управления демпфирующей силой, может подавляться необязательное управление демпфирующей силой. Дополнительно, когда скорость хода превышает заданное значение, посредством расширения области регулирования демпфирующей силы для выполнения управления демпфирующей силой, стабилизация состояния транспортного средства может быть стабилизирована в достаточной степени независимо от диапазона скоростей хода.
Помимо этого, область регулирования демпфирующей силы задается в области, смещенной в характеристиках демпфирования на стороне низкой демпфирующей силы. Таким образом, ухудшение комфорта во время езды не допускается даже при вводе высокочастотных вибраций и т.п. Следует отметить, что вследствие операции поворота, даже если степень насыщения задается в области, смещенной к характеристикам демпфирования на стороне низкой демпфирующей силы, может обеспечиваться стабильность транспортного средства.
(17) Предусмотрены:
- первый модуль 100 оценки состояния движения, второй модуль 200 оценки состояния движения и третий модуль 32 оценки состояния движения (средство определения поведения подрессоренной массы), которые определяют изменение в поведении подрессоренной массы транспортного средства;
- S/A 3 (амортизатор с регулируемой демпфирующей силой), который выводит демпфирующую силу на основе управления демпфирующей силой, чтобы подавлять изменение в поведении подрессоренной массы;
- третий модуль 32 оценки состояния движения (средство определения скорости хода), которое определяет скорость хода S/A 3; и
- модуль 33a управления подвеской Skyhook и модуль 35b1 ограничения степени насыщения (средство вычисления величины управления демпфирующей силой), которые вычисляют величину управления демпфирующей силой на основе управления демпфирующей силой в области для области регулирования демпфирующей силы, предписываемой посредством степени насыщения, причем степень насыщения области регулирования демпфирующей силы амортизатора с регулируемой демпфирующей силой в течение периода невыполнения поворота и когда скорость хода равна или меньше заданного значения, задается ниже степени насыщения, когда скорость хода превышает заданное значение, и область регулирования демпфирующей силы задается в области, за исключением характеристик демпфирования на стороне высокой демпфирующей силы.
Следовательно, когда скорость хода равна или меньше заданного значения, посредством сужения области регулирования демпфирующей силы и ограничения управления демпфирующей силой, может подавляться необязательное управление демпфирующей силой. Дополнительно, когда скорость хода превышает заданное значение, посредством задания области регулирования демпфирующей силы в области, за исключением характеристик демпфирования на стороне высокой демпфирующей силы, стабилизация состояния транспортного средства может быть стабилизирована в достаточной степени независимо от диапазона скоростей хода.
Помимо этого, область регулирования демпфирующей силы задается в области, смещенной в характеристиках демпфирования на стороне низкой демпфирующей силы. Таким образом, ухудшение комфорта во время езды не допускается даже при вводе высокочастотных вибраций и т.п. Помимо этого, область регулирования демпфирующей силы задается в области, смещенной в характеристиках демпфирования на стороне низкой демпфирующей силы. Следует отметить, что вследствие операции поворота, даже если степень насыщения задается в области, за исключением характеристик демпфирования на стороне высокой демпфирующей силы, может обеспечиваться стабильность транспортного средства.
(18) Время невыполнения поворота или движения не на повороте указывает движение по прямой. Следовательно, обеспечивается стабильность транспортного средства в состоянии движения по прямой.
(19) Модуль 35b2 определения угловой скорости крена (средство определения угловой скорости крена) предоставляется для того, чтобы определять угловую скорость крена транспортного средства, и транспортное средство определяется в невыполнении поворота, когда определенная угловая скорость крена меньше заданного значения. Другими словами, посредством определения на повороте, когда угловая скорость крена равна или превышает заданное значение, можно налагать чрезмерное ограничение во время поворота и подавлять формирование формирования чрезмерного крена.
(20) Предусмотрены:
- первый модуль 100 оценки состояния движения, второй модуль 200 оценки состояния движения и третий модуль 32 оценки состояния движения (средство определения поведения подрессоренной массы), которые определяют изменение в поведении подрессоренной массы транспортного средства;
- S/A 3 (амортизатор с регулируемой демпфирующей силой), который выводит демпфирующую силу на основе управления демпфирующей силой, чтобы подавлять изменение в поведении подрессоренной массы;
- третий модуль 32 оценки состояния движения (средство определения скорости хода), которое определяет скорость хода S/A 3 на основе скорости вращения колес; и
- модуль 33a управления подвеской Skyhook и модуль 35b1 ограничения степени насыщения (средство вычисления величины управления демпфирующей силой), которые вычисляют величину управления демпфирующей силой на основе управления демпфирующей силой в области для области регулирования демпфирующей силы, предписываемой посредством степени насыщения, при этом степень насыщения области регулирования демпфирующей силы амортизатора с регулируемой демпфирующей силой задается ниже степени насыщения, когда скорость хода превышает заданное значение.
Следовательно, когда скорость хода равна или меньше заданного значения, посредством сужения области регулирования демпфирующей силы и ограничения управления демпфирующей силой, может подавляться необязательное управление демпфирующей силой.
Дополнительно, при определении скорости хода на основе скорости вращения колес транспортного средства, экономически эффективная конфигурация может достигаться без необходимости затратного датчика. Следует отметить, что при определении скорости хода с использованием скорости вращения колес, поскольку амплитуда скорости хода является небольшой в диапазоне низких скоростей хода, не может полностью обеспечиваться точность при управлении подвеской Skyhook. В этом отношении, поскольку степень насыщения в диапазоне низких скоростей хода задается небольшой, даже при ухудшении характеристик точности при управлении подвеской Skyhook, не допускается чрезмерно ошибочный вывод, так что будет обеспечиваться стабильность транспортного средства.
(21) Предусмотрен модуль вычисления опорной скорости вращения колес, содержащий:
- модуль 301 извлечения компонента плоского движения (первый модуль вычисления), в котором первая скорость V0FL, V0FR, V0RL и V0RR вращения колес в качестве опорной скорости вращения колес каждого колеса вычисляется на основе модели вида сверху кузова транспортного средства, принимающей значение датчика скорости вращения колес в качестве ввода;
- модуль 302 исключения возмущений при крене (второй модуль вычисления), в котором вторая скорость V0F, V0R вращения колес, представляющая опорную скорость вращения колес передних и задних колес на основе модели вида спереди транспортного средства, принимающей первую скорость V0FL, V0FR, V0RL, V0RR вращения колес в качестве ввода;
- модуль 303 исключения возмущений при продольном движении относительно поперечной оси (третий модуль вычисления), в котором третьи скорости VbFL, VbFR, VbRL и VbRR вращения колес вычисляются на основе модели вида сбоку кузова транспортного средства, принимающей вторые скорости V0F, V0R вращения колес в качестве ввода;
- модуль 30 перестановки передних и задних колес (четвертый модуль вычисления), в котором четвертая скорость VbFL, VbFR, VbRL и VbRR вращения колес в качестве опорной скорости вращения колес каждого колеса вычисляется на основе модели вида сверху кузова транспортного средства, принимающей переключенные значения между вторыми скоростями V0F, V0R вращения передних колес и задних колес в качестве ввода;
- модуль 306 переключения скорости вращения колес, который принимает третьи скорости VbFL, VbFR, VbRL, VbRR вращения колес и четвертые скорости VbFL, VbFR, VbRL и VbRR вращения колес и выводит третьи скорости VbFL, VbFR, VbRL, VbRR вращения колес, когда скорость транспортного средства меньше заданной скорости транспортного средства, при выводе четвертой скорости VbFL, VbFR, VbRL, VbRR вращения колес, когда скорость транспортного средства равна или превышает заданную скорость транспортного средства; и
- модуль 304 перераспределения опорной скорости вращения колес (средство вычисления опорной скорости вращения колес), который вычисляет опорную скорость δ0 вращения колес на основе модели вида сверху кузова транспортного средства, принимающей третьи скорости VbFL, VbFR, VbRL, VbRR вращения колес или четвертые скорости VbFL, VbFR, VbRL, VbRR вращения колес в качестве вводов, при этом:
- третье средство 32 оценки состояния движения сконфигурировано с возможностью оценивать скорость хода S/A 3 на основе разности между значениями датчиков, определенными посредством датчика 5 скорости вращения колес, и опорной скоростью транспортного средства (модуль 321c GEO-преобразования).
Таким образом, в ходе движения на низкой скорости транспортного средства, посредством использования трех моделей для того, чтобы вычислять опорную скорость вращения колес при исключении возмущений, скорость хода может оцениваться точно, чтобы за счет этого улучшать управление вибрацией.
Дополнительно, в ходе движения на высокой скорости, посредством принятия скорости вращения задних колес в качестве опорной скорости вращения колес переднего колеса, может опускаться этап для исключения продольных возмущений, чтобы за счет этого обеспечивать чувствительность при управлении вибрацией.
(22) Модуль 322 вычисления скорости подрессоренной массы оценивает скорость подрессоренной массы посредством использования четырехколесной модели, сконструированной на основе члена вертикального колебательного движения, представляющего вертикальное движение четырех колес, члена продольного движения относительно поперечной оси, представляющего вертикальное движение передних колес и задних колес, члена крена, представляющего вертикальное движение левых колес и правых колес, и члена отклонения от вертикали, представляющего вертикальное движение каждой пары диагональных колес.
Более конкретно, при конструировании четырехколесной модели из скорости хода каждого колеса, при попытке разлагать по собственным формам на скорость подрессоренной массы, угловую скорость крена, угловую скорость продольного движения относительно поперечной оси и угловую скорость вертикального колебательного движения, один соответствующий компонент является недостаточным для того, чтобы делать решение нестабильным.
(23) Предусмотрены:
- первый модуль 100 оценки состояния движения, второй модуль 200 оценки состояния движения и третий модуль 32 оценки состояния движения (средство определения поведения подрессоренной массы), которые определяют изменение в поведении подрессоренной массы транспортного средства;
- S/A 3 (амортизатор с регулируемой демпфирующей силой), который выводит демпфирующую силу на основе управления демпфирующей силой, чтобы подавлять изменение в поведении подрессоренной массы;
- третий модуль 32 оценки состояния движения (средство определения скорости хода), которое определяет скорость хода S/A 3; и
- модуль 33a управления подвеской Skyhook и модуль 35b1 ограничения степени насыщения (средство вычисления величины управления демпфирующей силой), которые вычисляют величину управления демпфирующей силой на основе управления демпфирующей силой в области для области регулирования демпфирующей силы, предписываемой посредством степени насыщения, при этом степень насыщения области регулирования демпфирующей силы амортизатора с регулируемой демпфирующей силой задается ниже по мере того, как снижается скорость хода, когда скорость хода равна заданному значению или меньше.
Следовательно, когда скорость хода равна или меньше заданного значения, посредством сужения области регулирования демпфирующей силы и ограничения управления демпфирующей силой, может подавляться необязательное управление демпфирующей силой. Дополнительно, поскольку степень насыщения задается ниже по мере того, как снижается скорость хода, может достигаться более стабильное поведение транспортного средства.
(24) Предусмотрены:
- первый модуль 100 оценки состояния движения, второй модуль 200 оценки состояния движения и третий модуль 32 оценки состояния движения (средство определения поведения подрессоренной массы), которые определяют изменение в поведении подрессоренной массы транспортного средства;
- S/A 3 (амортизатор с регулируемой демпфирующей силой), который выводит демпфирующую силу на основе управления демпфирующей силой, чтобы подавлять изменение в поведении подрессоренной массы;
- третий модуль 32 оценки состояния движения (средство определения скорости хода), которое определяет скорость хода S/A 3; и
- модуль 33a управления подвеской Skyhook и модуль 35b1 ограничения степени насыщения (средство вычисления величины управления демпфирующей силой), которые инструктируют S/A 3 выводить демпфирующую силу на основе управления демпфирующей силой в пределах диапазона области регулирования демпфирующей силы, предписываемой степени насыщения, причем степень насыщения области регулирования демпфирующей силы амортизатора с регулируемой демпфирующей силой задается меньшей заданной степени насыщения, и область регулирования демпфирующей силы задается в области, смещенной к характеристикам демпфирования на стороне низкой демпфирующей силы, когда скорость хода равна или меньше заданной скорости.
Следовательно, когда скорость хода равна или меньше заданного значения, посредством сужения области регулирования демпфирующей силы и ограничения управления демпфирующей силой, может подавляться необязательное управление демпфирующей силой. Дополнительно, когда скорость хода превышает заданное значение, посредством расширения области регулирования демпфирующей силы для выполнения управления демпфирующей силой, стабилизация состояния транспортного средства может быть стабилизирована в достаточной степени независимо от диапазона скоростей хода. Помимо этого, поскольку степень насыщения задается ниже по мере того, как снижается скорость хода, может достигаться еще более стабилизированное поведение транспортного средства.
Дополнительно, поскольку область регулирования демпфирующей силы задается в области, смещенной к характеристикам демпфирования на стороне низкой демпфирующей силы, можно не допускать ухудшения комфорта во время езды даже при вводе высокочастотных вибраций.
(25) Предусмотрены:
- первый модуль 100 оценки состояния движения, второй модуль 200 оценки состояния движения и третий модуль 32 оценки состояния движения (средство определения поведения подрессоренной массы), которые определяют изменение в поведении подрессоренной массы транспортного средства;
- S/A 3 (амортизатор с регулируемой демпфирующей силой), который выводит демпфирующую силу на основе управления демпфирующей силой, чтобы подавлять изменение в поведении подрессоренной массы;
- третий модуль 32 оценки состояния движения (средство определения скорости хода), которое определяет скорость хода S/A 3; и
- модуль 33a управления подвеской Skyhook и модуль 35b1 ограничения степени насыщения (средство вычисления величины управления демпфирующей силой), которые вычисляют величину управления демпфирующей силой на основе управления демпфирующей силой в области регулирования демпфирующей силы, предписываемой степени насыщения, при этом:
- когда скорость хода равна или ниже первой скорости, степень насыщения области регулирования демпфирующей силы амортизатора с регулируемой демпфирующей силой задается равной первой степени насыщения,
- когда скорость хода равна или превышает вторую скорость, превышающую первую скорость, степень насыщения области регулирования демпфирующей силы амортизатора с регулируемой демпфирующей силой задается равной второй степени насыщения,
- когда скорость хода позиционируется между первой скоростью и второй скоростью, степень насыщения области регулирования демпфирующей силы амортизатора с регулируемой демпфирующей силой задается как переходная степень насыщения, которая переходит между первой степенью насыщения и второй степенью насыщения.
Следовательно, в диапазоне низких скоростей хода, равном или меньшем первой скорости, посредством задания степени насыщения равной 0%, может уменьшаться эффективность передачи вибрации на кузов транспортного средства, и обеспечивается комфорт во время езды. Дополнительно, когда скорость хода увеличивается и позиционируется между первой скоростью и второй скоростью, переходная степень насыщения должна задаваться таким образом, что, управляемая область должна постепенно расширяться около характеристик демпфирующей силы, имеющих наиболее жесткие характеристики. Таким образом, при подавлении передачи вибрации на кузов транспортного средства, может достигаться стабилизация поведения подрессоренной массы. При дополнительном увеличении скорости хода, поскольку 100% задается в качестве второй степени насыщения, стабилизация поведения подрессоренной массы может достигаться при демонстрации достаточных рабочих характеристик S/A 3.
(26) Предусмотрены:
- первый модуль 100 оценки состояния движения, второй модуль 200 оценки состояния движения и третий модуль 32 оценки состояния движения (средство определения поведения подрессоренной массы), которые определяют изменение в поведении подрессоренной массы транспортного средства;
- S/A 3 (амортизатор с регулируемой демпфирующей силой), который выводит демпфирующую силу на основе управления демпфирующей силой, чтобы подавлять изменение в поведении подрессоренной массы;
- третий модуль 32 оценки состояния движения (средство определения скорости хода), которое определяет скорость хода S/A 3; и
- модуль 33a управления подвеской Skyhook и модуль 35b1 ограничения степени насыщения (средство вычисления величины управления демпфирующей силой), которые инструктируют S/A 3 выводить демпфирующую силу на основе управления демпфирующей силой в пределах диапазона области регулирования демпфирующей силы, предписываемой степени насыщения, при этом степень насыщения области регулирования демпфирующей силы S/A 3, в которой амплитуда скорости хода меньше резонансной амплитуды подрессоренной массы, определенной при резонансной частоте подрессоренной массы, задается ниже степени насыщения при резонансной амплитуде подрессоренной массы.
Следовательно, когда амплитуда скорости хода меньше резонансной амплитуды подрессоренной массы, определенной при резонансной частоте подрессоренной массы, т.е. при определении в качестве области ощущений жесткости, посредством сужения области регулирования демпфирующей силы и для того, чтобы ограничивать управление демпфирующей силой, подавляется необязательное управление демпфирующей силой. Дополнительно, при определении в качестве области слабых ощущений, посредством расширения областей регулирования демпфирующей силы, чтобы выполнять управление демпфирующей силой, стабилизация состояния транспортного средства может быть полностью стабилизирована независимо от диапазонов скоростей хода. Дополнительно, посредством недопущения ситуации, в которой демпфирующая сила является высокой, можно не допускать ухудшения комфорта во время езды, ассоциированного с вводом высокочастотных вибраций.
(27) Предусмотрены:
- первый модуль 100 оценки состояния движения, второй модуль 200 оценки состояния движения и третий модуль 32 оценки состояния движения (средство определения поведения подрессоренной массы), которые определяют изменение в поведении подрессоренной массы транспортного средства;
- S/A 3 (амортизатор с регулируемой демпфирующей силой), который выводит демпфирующую силу на основе управления демпфирующей силой, чтобы подавлять изменение в поведении подрессоренной массы;
- третий модуль 32 оценки состояния движения (средство определения скорости хода), которое определяет скорость хода S/A 3; и
- модуль 33a управления подвеской Skyhook и модуль 35b1 ограничения степени насыщения (средство вычисления величины управления демпфирующей силой), которые инструктируют S/A 3 выводить демпфирующую силу на основе управления демпфирующей силой в пределах диапазона области регулирования демпфирующей силы, предписываемой степени насыщения, при этом степень насыщения области регулирования демпфирующей силы S/A 3, в которой амплитуда скорости хода меньше резонансной амплитуды неподрессоренной массы, определенной при резонансной частоте неподрессоренной массы, задается ниже степени насыщения при резонансной амплитуде неподрессоренной массы.
Следовательно, когда амплитуда скорости хода меньше резонансной амплитуды неподрессоренной массы, определенной при резонансной частоте неподрессоренной массы, т.е. при определении в качестве области ощущений жесткости, посредством сужения области регулирования демпфирующей силы и для того, чтобы ограничивать управление демпфирующей силой, подавляется необязательное управление демпфирующей силой. Дополнительно, при определении в качестве области слабых ощущений, посредством расширения областей регулирования демпфирующей силы, чтобы выполнять управление демпфирующей силой, стабилизация состояния транспортного средства может быть полностью стабилизирована независимо от диапазонов скоростей хода. Дополнительно, посредством недопущения ситуации, в которой демпфирующая сила является высокой, можно не допускать ухудшения комфорта во время езды, ассоциированного с вводом высокочастотных вибраций.
(28) Предусмотрены:
- первый модуль 100 оценки состояния движения, второй модуль 200 оценки состояния движения и третий модуль 32 оценки состояния движения (средство определения поведения подрессоренной массы), которые определяют изменение в поведении подрессоренной массы транспортного средства;
- S/A 3 (амортизатор с регулируемой демпфирующей силой), который выводит демпфирующую силу на основе управления демпфирующей силой, чтобы подавлять изменение в поведении подрессоренной массы;
- третий модуль 32 оценки состояния движения (средство определения скорости хода), которое определяет скорость хода S/A 3; и
- модуль 33a управления подвеской Skyhook и модуль 35b1 ограничения степени насыщения (средство вычисления величины управления демпфирующей силой), которые инструктируют S/A 3 выводить демпфирующую силу на основе управления демпфирующей силой в пределах диапазона области регулирования демпфирующей силы, предписываемой степени насыщения, при этом степень насыщения области регулирования демпфирующей силы S/A 3, в которой амплитуда скорости хода равна заданной амплитуде, определенной в заданной частотной области между резонансной частотой подрессоренной массы и резонансной частотой неподрессоренной массы, меньше степени насыщения с резонансной амплитудой, определенной при резонансной амплитуде подрессоренной массы или при резонансной амплитуде неподрессоренной массы.
Следовательно, когда амплитуда скорости хода равна заданной амплитуде, определенной в заданной частотной области между резонансной частотой подрессоренной массы и резонансной частотой неподрессоренной массы, т.е. при определении в качестве области ощущений жесткости, посредством сужения области регулирования демпфирующей силы и для того, чтобы ограничивать управление демпфирующей силой, подавляется необязательное управление демпфирующей силой. Дополнительно, при определении в качестве области слабых ощущений, посредством расширения областей регулирования демпфирующей силы, чтобы выполнять управление демпфирующей силой, стабилизация состояния транспортного средства может быть полностью стабилизирована независимо от диапазонов скоростей хода. Дополнительно, посредством недопущения ситуации, в которой демпфирующая сила является высокой, можно не допускать ухудшения комфорта во время езды, ассоциированного с вводом высокочастотных вибраций.
(29) Заданная частотная область означает частотный диапазон между 2 Гц и 7 Гц. Это показывает область между резонансной частотой подрессоренной массы и резонансной частотой неподрессоренной массы. Тем не менее, предпочтительно задавать степень насыщения низкой при заданной амплитуде, если область ощущений жесткости определяется в частотном диапазоне между 3 Гц и 6 Гц. Таким образом, подавляется высокочастотная вибрация в области ощущений жесткости, и может не допускаться ухудшение характеристик подавления высокочастотной вибрации.
ВТОРОЙ ВАРИАНТ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Далее описывается второй вариант осуществления изобретения. Поскольку базовая конфигурация является идентичной конфигурации первого варианта осуществления, описываются только их различия.
Фиг. 29 является блок-схемой управления, показывающей управляющую структуру устройства управления для транспортного средства согласно второму варианту осуществления. В первом варианте осуществления, предоставляются контроллер 1a двигателя, контроллер 2a тормоза и S/A-контроллер 3a, и каждый актуатор содержит систему с обратной связью, независимую от других. Напротив, во втором варианте осуществления, относительно контроллера 1a двигателя, предоставляется независимая система управления скоростью вращения колес с обратной связью, идентично первому варианту осуществления. Отличие заключается в том, что относительно тормоза 20 и S/A 3, предоставляется система с обратной связью по скорости вращения колес, которая подчиняется управлению посредством величины управления, вычисленной посредством модуля 33a управления подвеской Skyhook.
КОНФИГУРАЦИЯ МОДУЛЯ УПРАВЛЕНИЯ ПОДВЕСКОЙ SKYHOOK
В устройстве управления для транспортного средства согласно второму варианту осуществления, в качестве актуатора, чтобы осуществлять управление стабилизацией состояния подрессоренной массы, предоставляются двигатель 1, тормоз 20 и S/A 3. Из них, в модуле 33a управления подвеской Skyhook, относительно S/A 3, угловая скорость вертикального колебательного движения, угловая скорость крена и угловая скорость продольного движения относительно поперечной оси задаются в качестве объектов, которые должны управляться. Относительно тормоза, угловая скорость продольного движения относительно поперечной оси задается в качестве объекта, который должен управляться. Здесь, чтобы управлять подрессоренным состоянием посредством выделения величин управления для множества актуаторов различной операции, необходимо использовать общую величину управления. Во втором варианте осуществления, с использованием подрессоренных скоростей, оцененных посредством модуля 32 оценки состояния езды или движения, описанного выше, можно определять регулируемую переменную для каждого актуатора.
Величина управления подвеской Skyhook в вертикальном направлении может выражаться следующим образом:
FB=CskyB·dB
Величина управления подвеской Skyhook в направлении крена может выражаться следующим образом:
FR=CskyR·dR
Величина управления подвеской Skyhook в продольном направлении может выражаться следующим образом:
FP=CskyP·dP
FB отправляется в S/A 3 в качестве величины управления вертикальной стабилизацией состояния, FR отправляется в модуль 35 управления демпфирующей силой в качестве величины управления стабилизацией состояния по крену, поскольку FR заключает в себе управление, которое должно выполняться только посредством S/A 3.
Далее приводится описание величины FP управления подвеской Skyhook в продольном направлении. Управление продольным движением относительно поперечной оси выполняется посредством тормоза 20 и S/A 3.
Фиг. 30 является блок-схемой управления, представляющей обработку вычисления величины управления для каждого актуатора при выполнении управления продольным движением относительно поперечной оси во втором варианте осуществления. Модуль 33a управления подвеской Skyhook содержит модуль 331 вычисления первой целевой величины управления стабилизацией состояния, который вычисляет целевую угловую скорость продольного движения относительно поперечной оси, применимую ко всем актуаторам, в качестве величины управления, модуль 334 вычисления величины стабилизации состояния с использованием тормоза, который вычисляет величину управления стабилизацией состояния с использованием тормоза, которая должна достигаться посредством тормоза 20, и модуль 336 вычисления величины управления стабилизацией состояния с использованием S/A, который вычисляет величину управления стабилизацией состояния с использованием S/A, соответственно.
При управлении подвеской Skyhook в настоящей системе, поскольку наибольший приоритет состоит в том, чтобы работать таким образом, чтобы подавлять угловую скорость продольного движения относительно поперечной оси, угловая скорость продольного движения относительно поперечной оси выводится без изменения в модуле 331 вычисления первой целевой величины управления стабилизацией состояния (в дальнейшем в этом документе, угловая скорость продольного движения относительно поперечной оси упоминается в качестве первой целевой величины управления стабилизацией состояния). Модуль 334 вычисления величины управления стабилизацией состояния с использованием тормоза задается с предельным значением, которое ограничивает величину управления тормозным крутящим моментом, чтобы не вызывать чувство дискомфорта у пассажира (следует отметить, что подробности предельного значения подробнее поясняется ниже, ограничиваются). Таким образом, величина управления тормозным крутящим моментом, после преобразования в продольном ускорении, ограничивается так, что она остается в пределах заданного продольного ускорения (предельного значения, определенного посредством дискомфорта пассажира, срока службы и т.д.)
В модуле 335 вычисления второй целевой величины управления стабилизацией состояния вторая целевая величина управления стабилизацией состояния вычисляется как первая целевая величина управления стабилизацией состояния и величина управления стабилизацией состояния с использованием тормоза для вывода в модуль 336 вычисления величины управления стабилизацией состояния с использованием S/A. В модуле 336 вычисления величины управления стабилизацией состояния с использованием S/A продольная стабилизация состояния выводится согласно второй целевой величине управления стабилизацией состояния. В модуле 35 управления демпфирующей силой, величина управления вертикальной стабилизацией состояния на основе величины управления стабилизацией состояния по крену и величины управления продольной стабилизацией состояния (в дальнейшем в этом документе, совместно называемых "величиной управления стабилизацией состояния с использованием S/A"), величина управления демпфирующей силой вычисляется для вывода в S/A 3.
Как описано выше, относительно угловой скорости продольного движения относительно поперечной оси, вычисляется первая целевая величина управления стабилизацией состояния, и затем величина управления стабилизацией состояния с использованием S/A вычисляется на основе второй целевой величины управления стабилизацией состояния, представляющей разность между первой целевой величиной управления стабилизацией состояния и величиной управления стабилизацией состояния с использованием тормоза. Таким образом, поскольку величина управления угловой скоростью продольного движения относительно поперечной оси, выполняемая посредством S/A 3, может быть уменьшена посредством управления тормозом 20, управляемая область S/A 3 может быть уменьшена посредством управления тормозом 20. Таким образом, можно сужать управляемую область S/A 3 так, что управление стабилизацией состояния подрессоренной массы может достигаться посредством недорогого S/A 3.
Дополнительно, посредством увеличения величины управления S/A 3, демпфирующая сила существенно увеличивается. Увеличение демпфирующей силы означает намерение демонстрировать характеристику жесткой подвески. Если высокочастотная вибрация вводится от поверхности дороги, высокочастотный ввод может быть легко передан, в силу этого снижая комфорт водителя (в дальнейшем в этом документе, называется "ухудшением характеристик подавления высокочастотной вибрации"). Напротив, можно не допускать ухудшения характеристик подавления высокочастотной вибрации посредством подавления угловой скорости продольного движения относительно поперечной оси посредством актуатора, например, тормоза 20, который не влияет на характеристики передачи вибрации вследствие ввода от поверхности дороги, чтобы за счет этого уменьшать величину управления S/A 3. Вышеуказанные преимущества могут быть получены посредством определения величины управления тормозом 2 перед S/A 3.
Настоящая заявка основана на заявках на патент Японии № 2012-067073 и 2012-238932, полное содержание которых включено сюда посредством ссылки.













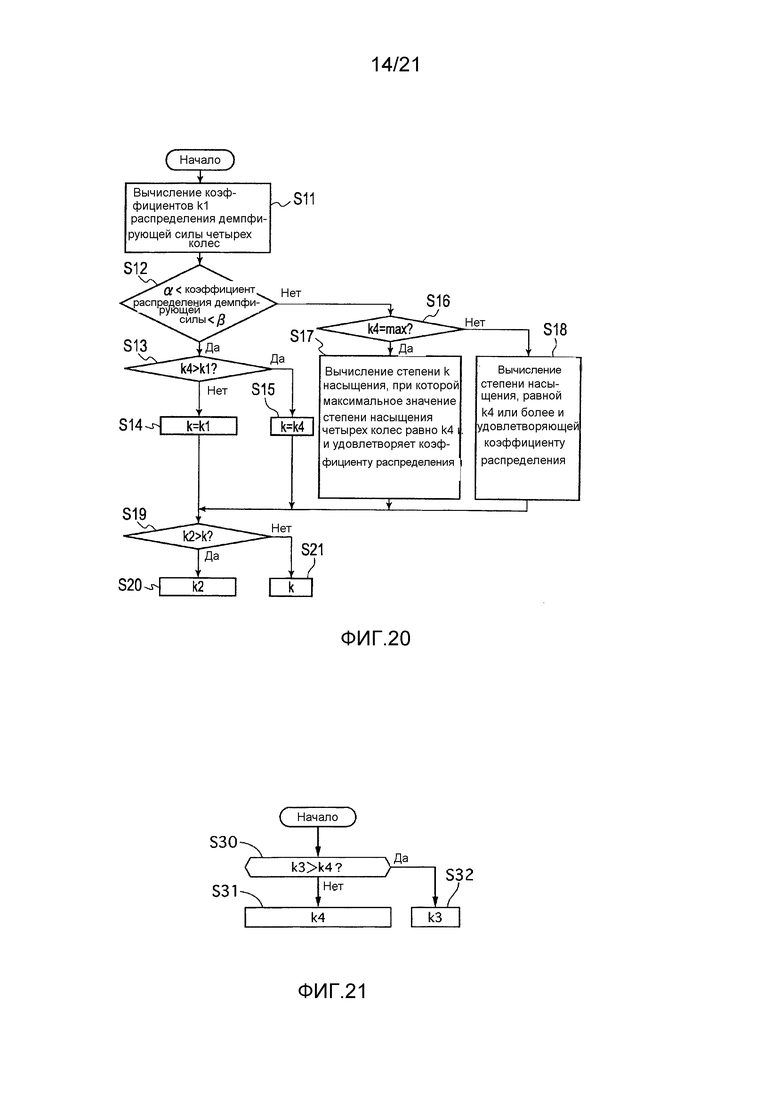


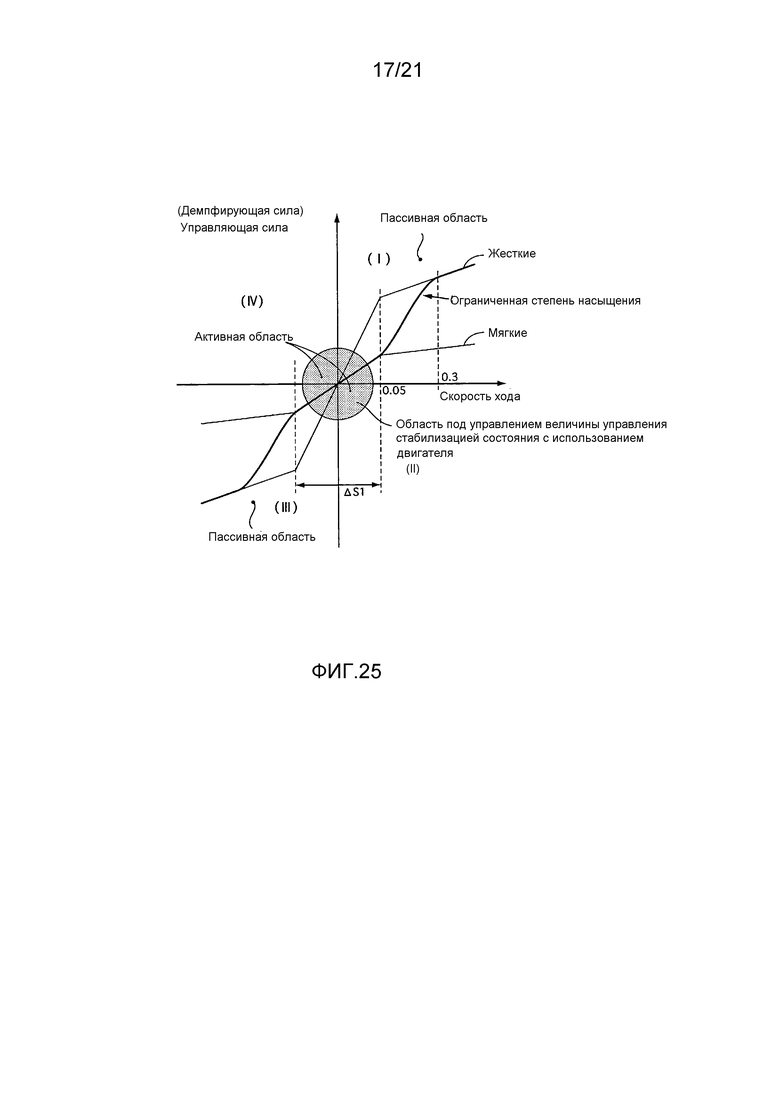




Изобретение предназначено для стабилизации состояния или поведения транспортного средства независимо от диапазона скоростей хода. Согласно изобретению выполняется управление стабилизацией состояния источника мощности, чтобы подавлять изменения в поведении подрессоренной массы транспортного средства, и выполняется управление демпфирующей силой для амортизаторов с регулируемой демпфирующей силой, чтобы подавлять изменения в поведении подрессоренной массы. Когда скорость хода является низкой, степень насыщения амортизаторов с регулируемой демпфирующей силой задается меньше степени насыщения, когда скорость хода является высокой. Предложены также устройства управления транспортного средства. Изобретение позволяет стабилизировать состояние или поведение транспортного средства независимо от диапазона скоростей хода. 14 н. и 12 з.п. ф-лы, 30 ил.
1. Система управления транспортного средства, содержащая:
средство определения поведения подрессоренной массы, которое определяет изменение в поведении подрессоренной массы транспортного средства;
источник мощности, который выводит движущую силу на основе управления движущей силой, чтобы подавлять изменение в поведении подрессоренной массы;
амортизатор с регулируемой демпфирующей силой, который выводит демпфирующую силу на основе управления демпфирующей силой, чтобы подавлять изменение в поведении подрессоренной массы;
средство определения скорости хода, которое определяет скорость хода амортизатора с регулируемой демпфирующей силой; и
средство вычисления величины управления демпфирующей силой, которое вычисляет величину управления демпфирующей силой на основе управления демпфирующей силой в пределах диапазона области регулирования демпфирующей силы с заданной шириной, предписываемой посредством степени насыщения, при этом степень насыщения области регулирования демпфирующей силы амортизатора с регулируемой демпфирующей силой задается ниже, когда скорость хода равна заданному значению или меньше, чем когда скорость хода превышает заданное значение, причем, по меньшей мере, когда скорость хода равна заданному значению или меньше, источник мощности сконфигурирован с возможностью выведения движущей силы на основе управления движущей силой, и амортизатор для регулирования демпфирования сконфигурирован с возможностью выведения демпфирующей силы, соответствующей величине управления демпфирующей силой, вычисленной посредством средства вычисления величины управления демпфирующей силой, чтобы таким образом подавлять изменение в поведении подрессоренной массы.
2. Устройство управления транспортного средства, содержащее:
средство определения поведения подрессоренной массы, которое определяет изменение в поведении подрессоренной массы транспортного средства;
источник мощности, который выводит движущую силу на основе управления движущей силой, чтобы подавлять изменение в поведении подрессоренной массы;
амортизатор с регулируемой демпфирующей силой, который выводит демпфирующую силу на основе управления демпфирующей силой, чтобы подавлять изменение в поведении подрессоренной массы;
средство определения скорости хода, которое определяет скорость хода амортизатора с регулируемой демпфирующей силой;
средство вычисления величины управления демпфирующей силой, которое вычисляет величину управления демпфирующей силой на основе управления демпфирующей силой в пределах диапазона области регулирования демпфирующей силы с заданной шириной, предписываемой степени насыщения, при этом степень насыщения области регулирования демпфирующей силы амортизатора с регулируемой демпфирующей силой задается ниже, когда скорость хода равна заданному значению или меньше него, чем когда скорость хода превышает заданное значение, причем область регулирования демпфирующей силы, предписываемая степени насыщения при скорости хода, равной заданному значению или меньше него, смещается в области к характеристикам силы демпфирования на стороне низкой демпфирующей силы, при этом, по меньшей мере, когда скорость хода равна заданному значению или меньше него, двигатель сконфигурирован с возможностью выведения движущей силы на основе управления движущей силой, и амортизатор сконфигурирован с возможностью выведения демпфирующей силы, соответствующей величине управления демпфирующей силой, вычисленной посредством модуля управления подвеской Skyhook и модуля ограничения степени насыщения, чтобы таким образом подавлять изменение в поведении подрессоренной массы.
3. Устройство по п. 2, в котором демпфирующая сила, сформированная согласно характеристикам демпфирования на стороне низкой демпфирующей силы при произвольной скорости хода, сконфигурирована так, чтобы быть меньше демпфирующей силы, сформированной согласно характеристикам демпфирования на стороне высокой демпфирующей силы.
4. Устройство управления транспортного средства, содержащее:
средство определения поведения подрессоренной массы, которое определяет изменение в поведении подрессоренной массы транспортного средства;
источник мощности, который выводит движущую силу на основе управления движущей силой, чтобы подавлять изменение в поведении подрессоренной массы;
амортизатор с регулируемой демпфирующей силой, который выводит демпфирующую силу на основе управления демпфирующей силой, чтобы подавлять изменение в поведении подрессоренной массы;
средство определения скорости хода, которое определяет скорость хода амортизатора; и
средство вычисления величины управления демпфирующей силой, которое вычисляет величину управления демпфирующей силой на основе управления демпфирующей силой в пределах диапазона области регулирования демпфирующей силы, предписываемой посредством степени насыщения, причем степень насыщения области регулирования демпфирующей силы амортизатора с регулируемой демпфирующей силой задается ниже, когда скорость хода равна или меньше заданного значения, чем степень насыщения, когда скорость хода превышает заданное значение, при этом область регулирования демпфирующей силы с заданной шириной, предписываемой степени насыщения, когда скорость хода равна или меньше заданного значения, задается в области, за исключением характеристик демпфирования на стороне высокой демпфирующей силы, причем, по меньшей мере, когда скорость хода равна заданному значению или меньше него, двигатель сконфигурирован с возможностью выведения движущей силы на основе управления движущей силой, и амортизатор с регулируемой демпфирующей силой сконфигурирован с возможностью выведения демпфирующей силы, соответствующей величине управления демпфирующей силой, вычисленной посредством средства вычисления величины управления демпфирующей силой, чтобы таким образом подавлять изменение в поведении подрессоренной массы.
5. Устройство по п. 4, в котором демпфирующая сила, сформированная согласно характеристикам демпфирования на стороне высокой демпфирующей силы при произвольной скорости хода, сконфигурирована так, чтобы превышать демпфирующую силу, сформированную согласно характеристикам демпфирования на стороне низкой демпфирующей силы.
6. Устройство управления транспортного средства, содержащее:
средство определения поведения подрессоренной массы, которое определяет изменение в поведении подрессоренной массы транспортного средства;
источник мощности, который выводит движущую силу на основе управления движущей силой, чтобы подавлять изменение в поведении подрессоренной массы;
амортизатор с регулируемой демпфирующей силой, который выводит демпфирующую силу на основе управления демпфирующей силой, чтобы подавлять изменение в поведении подрессоренной массы;
средство определения скорости хода, которое определяет скорость хода амортизатора с регулируемой демпфирующей силой на основе скорости вращения колес транспортного средства; и
средство вычисления величины управления демпфирующей силой, которое вычисляет величину управления демпфирующей силой на основе управления демпфирующей силой в пределах диапазона области регулирования демпфирующей силы с заданной шириной, предписываемой степени насыщения, причем степень насыщения области регулирования демпфирующей силы амортизатора с регулируемой демпфирующей силой задается ниже при скорости хода, равной заданному значению или меньше него, степени насыщения, когда скорость хода превышает заданное значение, при этом, по меньшей мере, когда скорость хода равна заданному значению или меньше него, источник мощности сконфигурирован с возможностью выведения движущей силы на основе управления движущей силой, и амортизатор с регулируемой демпфирующей силой сконфигурирован с возможностью выведения демпфирующей силы, соответствующей величине управления демпфирующей силой, вычисленной посредством средства вычисления величины управления демпфирующей силой, чтобы таким образом подавлять изменение в поведении подрессоренной массы.
7. Устройство по п. 6, в котором имеется модуль вычисления опорной скорости вращения колес, который содержит:
первый модуль вычисления, в котором первая скорость вращения колес в качестве опорной скорости вращения колес каждого колеса вычисляется на основе модели вида сверху кузова транспортного средства, принимающей скорость вращения колес в качестве ввода;
второй модуль вычисления, в котором вторая скорость вращения колес, представляющая опорную скорость вращения колес передних и задних колес, вычисляется на основе модели вида спереди транспортного средства, принимающей первую скорость вращения колес в качестве ввода;
третий модуль вычисления, в котором третья скорость вращения колес вычисляется как опорная скорость вращения колес для всех колес на основе модели вида сбоку кузова транспортного средства, принимающей вторую скорость вращения передних колес в качестве ввода; и
средство вычисления опорной скорости вращения колес, которое вычисляет конечную опорную скорость вращения колес для каждого колеса на основе модели вида сверху кузова транспортного средства, принимающей третью скорость вращения колес в качестве ввода, при этом средство определения скорости хода сконфигурировано с возможностью оценки скорости хода на основе разности между скоростью вращения колес каждого колеса и конечной опорной скоростью вращения колес.
8. Устройство по п. 6 или 7, в котором средство определения поведения подрессоренной массы оценивает изменение в поведении подрессоренных масс посредством использования четырехколесной модели, сконструированной на основе члена вертикального колебательного движения, представляющего вертикальное движение четырех колес, члена продольного движения относительно поперечной оси, представляющего вертикальное движение передних колес и задних колес, члена крена, представляющего вертикальное движение левых колес и правых колес, и члена отклонения от вертикали, представляющего вертикальное движение каждой пары диагональных колес.
9. Устройство управления транспортного средства, содержащее:
средство определения поведения подрессоренной массы, которое определяет изменение в поведении подрессоренной массы транспортного средства;
источник мощности, который выводит движущую силу на основе управления движущей силой, чтобы подавлять изменение в поведении подрессоренной массы;
амортизатор с регулируемой демпфирующей силой, который выводит демпфирующую силу на основе управления демпфирующей силой, чтобы подавлять изменение в поведении подрессоренной массы;
средство определения скорости хода, которое определяет скорость хода амортизатора с регулируемой демпфирующей силой; и
средство вычисления величины управления демпфирующей силой, которое вычисляет величину управления демпфирующей силой на основе управления демпфирующей силой в пределах диапазона области регулирования демпфирующей силы с заданной шириной, предписываемой посредством степени насыщения, причем степень насыщения области регулирования демпфирующей силы амортизатора с регулируемой демпфирующей силой задается ниже по мере того, как снижается скорость хода, когда скорость хода равна заданному значению или меньше него, при этом, по меньшей мере, когда скорость хода равна заданному значению или меньше него, источник мощности сконфигурирован с возможностью выведения движущей силы на основе управления движущей силой, и амортизатор с регулируемой демпфирующей силой сконфигурирован с возможностью выведения демпфирующей силы, соответствующей величине управления демпфирующей силой, вычисленной посредством средства вычисления величины управления демпфирующей силой, чтобы таким образом подавлять изменение в поведении подрессоренной массы.
10. Устройство управления транспортного средства, содержащее:
средство определения поведения подрессоренной массы, которое определяет изменение в поведении подрессоренной массы транспортного средства;
источник мощности, который выводит движущую силу на основе управления движущей силой, чтобы подавлять изменение в поведении подрессоренной массы;
амортизатор с регулируемой демпфирующей силой, который выводит демпфирующую силу на основе управления демпфирующей силой, чтобы подавлять изменение в поведении подрессоренной массы;
средство определения скорости хода, которое определяет скорость хода амортизатора с регулируемой демпфирующей силой; и
средство вычисления величины управления демпфирующей силой, которое вычисляет величину управления демпфирующей силой на основе управления демпфирующей силой в пределах диапазона области регулирования демпфирующей силы с заданной шириной, предписываемой степени насыщения, причем степень насыщения области регулирования демпфирующей силы амортизатора с регулируемой демпфирующей силой задается равной или ниже заданной степени насыщения, когда скорость хода равна или меньше заданного значения, при этом, по меньшей мере, когда скорость хода равна заданному значению или меньше него, источник мощности сконфигурирован с возможностью выведения движущей силы на основе управления движущей силой, и амортизатор с регулируемой демпфирующей силой сконфигурирован с возможностью выведения демпфирующей силы, соответствующей величине управления демпфирующей силой, вычисленной посредством средства вычисления величины управления демпфирующей силой, чтобы таким образом подавлять изменение в поведении подрессоренной массы.
11. Система по п. 1, в которой средство вычисления величины управления демпфирующей силой обеспечивает увеличение степени насыщения во время поворота.
12. Система по п. 11, в которой время поворота включает в себя состояние, в котором прогнозируется поворот до фактического поворота.
13. Система по п. 1, в которой имеется средство определения угловой скорости крена для определения угловой скорости крена транспортного средства, при этом средство вычисления величины управления демпфирующей силой дает возможность степени насыщения быть более высокой по мере того, как увеличивается определяемая угловая скорость крена.
14. Способ управления транспортным средством, при котором когда скорость хода амортизатора с регулируемой демпфирующей силой, чтобы выполнять управление демпфирующей силой для подавления изменений в поведении подрессоренной массы, равна заданному значению или меньше него, степень насыщения области регулирования демпфирующей силы задается ниже степени насыщения, когда скорость хода превышает заданное значение, так что при выполнении управления демпфирующей силой в пределах диапазона области регулирования демпфирующей силы с заданной шириной, предписываемой степени насыщения, выполняется управление движущей силой, чтобы подавлять изменения в поведении подрессоренной массы посредством источника мощности.
15. Устройство управления транспортного средства, содержащее:
средство определения поведения подрессоренной массы, которое определяет изменение в поведении подрессоренной массы транспортного средства;
амортизатор с регулируемой демпфирующей силой, который выводит демпфирующую силу на основе управления демпфирующей силой, чтобы подавлять изменение в поведении подрессоренной массы;
средство определения скорости хода, которое определяет скорость хода амортизатора с регулируемой демпфирующей силой; и
средство управления демпфирующей силой, которое выводит в амортизатор с регулируемой демпфирующей силой демпфирующую силу на основе управления демпфирующей силой в пределах диапазона области регулирования демпфирующей силы с заданной шириной, предписываемой степени насыщения, причем в течение времени невыполнения поворота и когда скорость хода равна или меньше заданного значения, степень насыщения области регулирования демпфирующей силы задается ниже степени насыщения, когда скорость хода превышает заданное значение, и область регулирования демпфирующей силы с заданной шириной, предписываемой степени насыщения, задается в области, смещенной к характеристикам демпфирования на стороне низкой демпфирующей силы.
16. Устройство управления транспортного средства, содержащее:
средство определения поведения подрессоренной массы, которое определяет изменение в поведении подрессоренной массы транспортного средства;
амортизатор с регулируемой демпфирующей силой, который выводит демпфирующую силу на основе управления демпфирующей силой, чтобы подавлять изменение в поведении подрессоренной массы;
средство определения скорости хода, которое определяет скорость хода амортизатора с регулируемой демпфирующей силой; и
средство управления демпфирующей силой, которое выводит в амортизатор с регулируемой демпфирующей силой демпфирующую силу на основе управления демпфирующей силой в области для области регулирования демпфирующей силы с заданной шириной, предписываемой степени насыщения, причем в течение времени невыполнения поворота и когда скорость хода равна или меньше заданного значения, степень насыщения области регулирования демпфирующей силы задается ниже степени насыщения, когда скорость хода превышает заданное значение, и область регулирования демпфирующей силы с заданной шириной, предписываемой степени насыщения, задается в области, за исключением характеристик демпфирования на стороне высокой демпфирующей силы.
17. Устройство по п. 15 или 16, в котором время невыполнения поворота означает время движения по прямой.
18. Устройство по п. 15, в котором имеется средство определения угловой скорости крена для определения угловой скорости крена транспортного средства, причем транспортное средство определяется в невыполнении поворота, когда определенная угловая скорость крена меньше заданного значения.
19. Устройство управления транспортного средства, содержащее:
средство определения поведения подрессоренной массы, которое определяет изменение в поведении подрессоренной массы транспортного средства;
амортизатор с регулируемой демпфирующей силой, который выводит демпфирующую силу на основе управления демпфирующей силой, чтобы подавлять изменение в поведении подрессоренной массы;
средство определения скорости хода, которое определяет скорость хода амортизатора с регулируемой демпфирующей силой на основе скорости вращения колес; и
средство управления демпфирующей силой, которое выводит в амортизатор с регулируемой демпфирующей силой демпфирующую силу на основе управления демпфирующей силой в пределах диапазона области регулирования демпфирующей силы с заданной шириной, предписываемой посредством степени насыщения, причем степень насыщения области регулирования демпфирующей силы амортизатора с регулируемой демпфирующей силой задается ниже, когда скорость хода равна или меньше заданного значения, чем степень насыщения, когда скорость хода превышает заданное значение.
20. Устройство по п. 19, дополнительно содержащее:
первый модуль вычисления, в котором первая скорость вращения колес в качестве опорной скорости вращения колес каждого колеса вычисляется на основе модели вида сверху кузова транспортного средства, принимающей скорость вращения колес в качестве ввода;
второй модуль вычисления, в котором вторая скорость вращения колес, представляющая опорную скорость вращения колес передних и задних колес, вычисляется на основе модели вида спереди транспортного средства, принимающей первую скорость вращения колес в качестве ввода;
третий модуль вычисления, в котором третья скорость вращения колес вычисляется как опорная скорость вращения колес для всех колес на основе модели вида сбоку кузова транспортного средства, принимающей вторую скорость вращения передних колес в качестве ввода; и
средство вычисления опорной скорости вращения колес, которое вычисляет конечную опорную скорость вращения колес для каждого колеса на основе модели вида сверху кузова транспортного средства, принимающей третью скорость вращения колес в качестве ввода.
21. Устройство по п. 19 или 20, в котором модуль вычисления стабилизации состояния подрессоренной массы оценивает изменение в поведении подрессоренной массы посредством использования четырехколесной модели, сконструированной на основе члена вертикального колебательного движения, представляющего вертикальное движение четырех колес, члена продольного движения относительно поперечной оси, представляющего вертикальное движение передних колес и задних колес, члена крена, представляющего вертикальное движение левых колес и правых колес, и члена отклонения от вертикали, представляющего вертикальное движение каждой пары диагональных колес.
22. Устройство управления транспортного средства, содержащее:
средство определения поведения подрессоренной массы, которое определяет изменение в поведении подрессоренной массы транспортного средства;
амортизатор с регулируемой демпфирующей силой, который выводит демпфирующую силу на основе управления демпфирующей силой, чтобы подавлять изменение в поведении подрессоренной массы;
средство определения скорости хода, которое определяет скорость хода амортизатора с регулируемой демпфирующей силой; и
средство управления демпфирующей силой, которое выводит в амортизатор с регулируемой демпфирующей силой демпфирующую силу на основе управления демпфирующей силой в области для области регулирования демпфирующей силы с заданной шириной, предписываемой посредством степени насыщения, причем степень насыщения области регулирования демпфирующей силы амортизатора с регулируемой демпфирующей силой задается ниже по мере того, как снижается скорость хода, когда скорость хода равна заданному значению или меньше него.
23. Устройство управления транспортного средства, содержащее:
средство определения поведения подрессоренной массы, которое определяет изменение в поведении подрессоренной массы транспортного средства;
амортизатор с регулируемой демпфирующей силой, который выводит демпфирующую силу на основе управления демпфирующей силой, чтобы подавлять изменение в поведении подрессоренной массы;
средство определения скорости хода, которое определяет скорость хода амортизатора с регулируемой демпфирующей силой; и
средство управления демпфирующей силой, которое обеспечивает вывод амортизатором с регулируемой демпфирующей силой демпфирующей силы на основе управления демпфирующей силой в пределах диапазона области регулирования демпфирующей силы с заданной шириной, предписываемой степени насыщения, причем степень насыщения области регулирования демпфирующей силы амортизатора с регулируемой демпфирующей силой, в которой амплитуда скорости хода меньше резонансной амплитуды подрессоренной массы, определяемой при резонансной частоте подрессоренной массы, задается ниже степени насыщения при резонансной амплитуде подрессоренной массы.
24. Устройство управления транспортного средства, содержащее:
средство определения поведения подрессоренной массы, которое определяет изменение в поведении подрессоренной массы транспортного средства;
амортизатор с регулируемой демпфирующей силой, который выводит демпфирующую силу на основе управления демпфирующей силой, чтобы подавлять изменение в поведении подрессоренной массы;
средство определения скорости хода, которое определяет скорость хода амортизатора с регулируемой демпфирующей силой; и
средство управления демпфирующей силой, которое обеспечивает вывод амортизатором с регулируемой демпфирующей силой демпфирующей силы на основе управления демпфирующей силой в пределах диапазона области регулирования демпфирующей силы с заданной шириной, предписываемой степени насыщения, причем степень насыщения области регулирования демпфирующей силы амортизатора с регулируемой демпфирующей силой, в которой амплитуда скорости хода меньше резонансной амплитуды неподрессоренной массы, определяемой при резонансной частоте неподрессоренной массы, задается ниже степени насыщения при резонансной амплитуде неподрессоренной массы.
25. Устройство управления транспортного средства, содержащее:
средство определения поведения подрессоренной массы, которое определяет изменение в поведении подрессоренной массы транспортного средства;
амортизатор с регулируемой демпфирующей силой, который выводит демпфирующую силу на основе управления демпфирующей силой, чтобы подавлять изменение в поведении подрессоренной массы;
средство определения скорости хода, которое определяет скорость хода амортизатора с регулируемой демпфирующей силой; и
средство управления демпфирующей силой, которое обеспечивает вывод амортизатором с регулируемой демпфирующей силой демпфирующей силы на основе управления демпфирующей силой в пределах диапазона области регулирования демпфирующей силы с заданной шириной, предписываемой степени насыщения, причем степень насыщения области регулирования демпфирующей силы амортизатора с регулируемой демпфирующей силой, в которой амплитуда скорости хода равна заданной амплитуде, определяемой в заданной частотной области между резонансной частотой подрессоренной массы и резонансной частотой неподрессоренной массы, меньше степени насыщения с резонансной амплитудой, определяемой либо при резонансной амплитуде подрессоренной массы, либо при резонансной амплитуде неподрессоренной массы.
26. Устройство по п. 25, в котором заданная частотная область относится к частотному диапазону между 2 Гц и 7 Гц.
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| Способ окисления боковых цепей ароматических углеводородов и их производных в кислоты и альдегиды | 1921 |
|
SU58A1 |

