Изобретение относится к области машиностроения и может быть использовано в качестве пространственного шестизвенного механизма с трехмерным движением.
Пространственные шестизвенные шарнирные системы обладают уникальной способностью складываться в плоскую конструкцию. Получение новых подвижных пространственных механизмов является актуальной задачей.
Известно, что кинематическая замкнутая цепь с шестью вращательными кинематическими парами представляет в общем случае жесткую систему (Верховский А.В. Шестизвенные пространственные шарнирные механизмы // Известия Томского политехнического института имени С.М. Кирова, т. 61, вып. 1. 1947. - С. 47-52). Из источника информации известно так же, что при соблюдении некоторых частных условий шестизвенная шарнирная система, составленная в виде простой замкнутой кинематической цепи, приобретает одну степень подвижности, т.е. является механизмом. Так, например, существует шестизвенный механизм с вращательными кинематическими парами, у которого оси шарниров образуют два пучка пересекающихся осей, по три оси в каждом.
Недостатком известного шестизвенного пространственного механизма является отсутствие гарантии того, что при синтезе механизма после замыкания кинематической цепи шестизвенная шарнирная система приобретет одну степень подвижности, т.е. станет механизмом.
Известен пространственный механизм с вращательными кинематическими парами (механизм Брикара), состоящий из шести звеньев, соединенных между собой с помощью шести шарниров (Галиуллин И.А. Синтез подвижных шестизвенных механизмов [Текст] / И.А. Галиуллин, М.Г. Яруллин // Проблемы и перспективы развития авиации, наземного транспорта и энергетики «АНТЭ - 2013»: Международная научно-техническая конференция, 19-21 ноября 2013 г.: Сборник докладов, Казань: Из-во Казан, гос. техн. ун-та, 2013. - С 23-31). Базовой фигурой, на которой построен механизм Брикара, является куб.
Недостатком известного шестизвенного пространственного механизма является отсутствие гарантии того, что при синтезе механизма после замыкания кинематической цепи шестизвенная шарнирная система приобретет одну степень подвижности, т.е. станет механизмом. Из указанного источника информации известно также, что одной степенью подвижности обладает кинематическая замкнутая цепь с семью вращательными кинематическими парами звеньев.
Решаемой задачей изобретения является создание подвижного пространственного шестизвенного механизма с вращательными кинематическими парами.
Технический результат, на достижение которого направлено предлагаемое изобретение, заключается в создании подвижного пространственного шестизвенного механизма, способного складываться в плоскую и линейную конструкцию.
Технический результат достигается тем, что пространственный шестизвенный механизм с вращательными кинематическими парами, состоящий из звеньев в виде стержней с шарнирами, содержит, по меньшей мере, одно звено, состоящее из двух частей, образующих подвижное цилиндрическое соединение с возможностью взаимного перемещения частей в продольном направлении и вращения в поперечном направлении и последующей фиксации их относительно друг друга.
Предложенная пространственная шестизвенная шарнирная система в соответствии с техническим решением предлагаемого изобретения обладает подвижностью и поэтому является механизмом.
Для пояснения технической сущности рассмотрим чертежи, на которых:
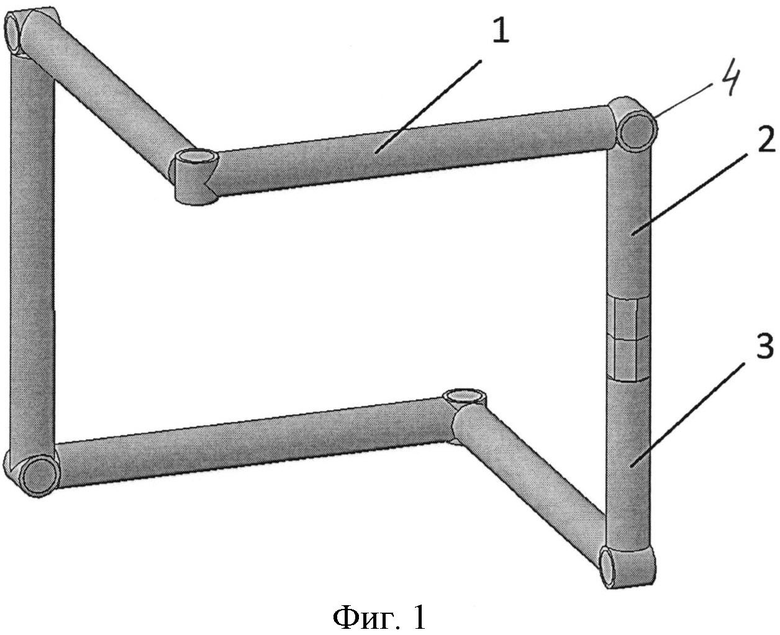
фиг.1 - схематическое изображение пространственного шестизвенного механизма с вращательными кинематическими парами;
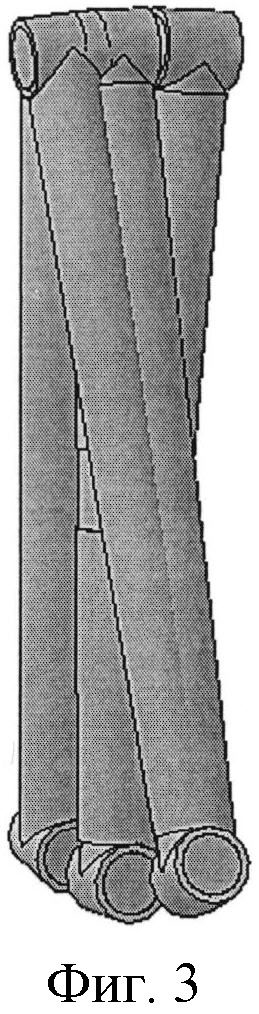
фиг.2 - схематическое изображение пространственного семизвенного механизма;
фиг.3 - схематическое изображение пространственного шестизвенного механизма с вращательными кинематическими парами, сложенного в линейную конструкцию, где:
1 - звенья;
2 - одна часть шестого звена;
3 - другая часть шестого звена;
4 - шарниры.
Пространственный шестизвенный механизм с вращательными кинематическими парами, показанный на фиг.1, состоит из пяти одинаковых звеньев 1, соединенных между собой с помощью шарниров 4. Базовой фигурой, на которой построен механизм, является куб. Шестое звено составное и состоит из двух частей: 2 и 3. Части 2 и 3 составного звена образуют подвижное цилиндрическое соединение с возможностью перемещения части 2 в продольном направлении и вращения в поперечном направлении относительно части 3. Соединение частей 2 и 3 составного звена выполнено с возможностью фиксации частей 2 и 3 в любом промежуточном положении их относительно друг друга.
Работа пространственного шестизвенного механизма с вращательными кинематическими парами выполняется следующим способом. Составляется замкнутая пространственная кинематическая цепь, представленная на фиг.2 до фиксации частей 2 и 3 составного звена в определенном положении их относительно друг друга. По сути, составленная кинематическая цепь является семизвенной, и поэтому она обладает одной степенью подвижности. После фиксации частей 2 и 3 составного звена в определенном положении их относительно друг друга кинематическая цепь становится шестизвенной, однако подвижность кинематической цепи сохраняется.
Положение частей 2 и 3 составного звена, при котором пространственная шестизвенная шарнирная система сохраняет подвижность и является механизмом, определяется из следующих условий:
- длина составного звена должна быть равной длине остальных пяти звеньев;
- оси шарниров составного звена должны быть взаимно перпендикулярными.
Следует отметить, что имеется два варианта существования пространственного шестизвенного механизма:
- обычный (развернутый) вариант, представленный на фиг.1;
- сложенный (упакованный) вариант, представленный на фиг.3.
Для перехода из одного варианта существования пространственного шестизвенного механизма в другое достаточно повернуть одну часть составного звена, например часть 2, относительно другой части 3 составного звена на 180 градусов.
Таким образом, предложенная шарнирная система после фиксации частей 2 и 3 составного звена в требуемом положении станет одноподвижным шестизвенным пространственным механизмом.
Пространственный шестизвенный механизм способен складываться в плоскую конструкцию.
По сравнению с известными аналогами предлагаемый пространственный шестизвенный механизм в обычном (развернутом) варианте существования в соответствии с конструктивными особенностями его позволяет получить подвижный механизм с уникальной способностью складываться в плоскую и в линейную конструкцию.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СИНТЕЗА ПРОСТРАНСТВЕННОГО ШЕСТИЗВЕННОГО МЕХАНИЗМА С ВРАЩАТЕЛЬНЫМИ КИНЕМАТИЧЕСКИМИ ПАРАМИ И ПРОСТРАНСТВЕННЫЙ ШЕСТИЗВЕННЫЙ МЕХАНИЗМ С ВРАЩАТЕЛЬНЫМИ КИНЕМАТИЧЕСКИМИ ПАРАМИ (ВАРИАНТЫ) | 2014 |
|
RU2566170C1 |
| Способ синтеза пространственного механизма | 2016 |
|
RU2619152C1 |
| СЕТЧАТАЯ ОБОЛОЧКА | 2017 |
|
RU2665338C1 |
| СПОСОБ УТИЛИЗАЦИИ ПОПУТНОГО НЕФТЯНОГО ГАЗА И ЭНЕРГЕТИЧЕСКАЯ МАШИНА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2488705C1 |
| СПОСОБ УТИЛИЗАЦИИ ПОПУТНОГО НЕФТЯНОГО ГАЗА И ЭНЕРГЕТИЧЕСКАЯ МАШИНА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2447363C1 |
| СПОСОБ ПОЛУЧЕНИЯ СТЕРЕОПАРЫ | 2006 |
|
RU2339985C2 |
| РЕЗЦОВАЯ ГОЛОВКА ДЛЯ УДАЛЕНИЯ ВНУТРЕННЕГО ГРАТА В ЭЛЕКТРОСВАРНЫХ ТРУБАХ | 2014 |
|
RU2595163C2 |
| СПОСОБ РАБОТЫ ТЕПЛОЭНЕРГЕТИЧЕСКОЙ УСТАНОВКИ ДЛЯ УТИЛИЗАЦИИ ПОПУТНОГО НЕФТЯНОГО ГАЗА И ТЕПЛОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2509956C1 |
| СФЕРИЧЕСКАЯ ОБОЛОЧКА | 2019 |
|
RU2727980C1 |
| Газоотборник | 1973 |
|
SU523325A1 |
Изобретение относится к области машиностроения, а именно к пространственным шестизвенным механизмам. Пространственный шестизвенный механизм с вращательными кинематическими парами состоит из шести звеньев (1), соединенных между собой с помощью шести шарниров (4). Одно звено составное и состоит из двух частей (2) и (3), которые образуют подвижное цилиндрическое соединение с возможностью взаимного перемещения частей в продольном направлении и вращения в поперечном направлении с последующей фиксацией относительно друг друга. Достигается способность механизма складываться в плоскую и линейную конструкцию. 3 ил.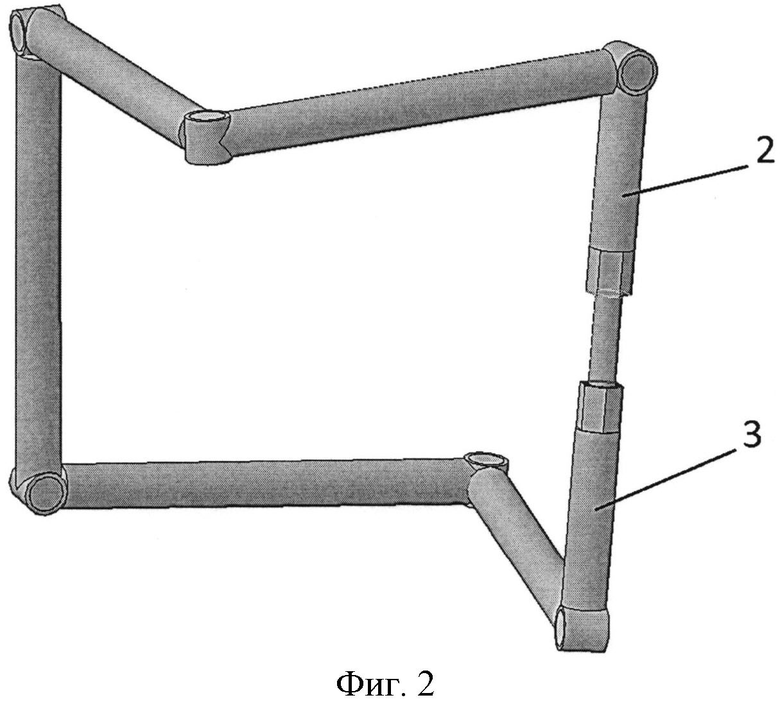
Пространственный шестизвенный механизм с вращательными кинематическими парами, состоящий из звеньев в виде стержней с шарнирами, отличающийся тем, что содержит, по меньшей мере, одно звено, состоящее из двух частей, образующих подвижное цилиндрическое соединение с возможностью взаимного перемещения частей в продольном направлении и вращения в поперечном направлении и последующей фиксации их относительно друг друга.
| Способ и прибор для определения глубины залегания камней, пузырей и т.п. в кусках стекла | 1927 |
|
SU7687A1 |
| ШЕСТИЗВЕННЫЙ ШАРНИРНЫЙ МЕХАНИЗМ | 2007 |
|
RU2338104C1 |
| "Синтез подвижных шестизвенных механизмов ", И | |||
| А | |||
| Галиуллин, М | |||
| Г | |||
| Яруллин, Проблемы и перспективы развития авиации, наземного транспорта и энергетики "АНТЭ - 2013", Международная научно-техническая конференция, 19-21 ноября 2013 г.: Сборник докладов, Казань: Из-во Казан, гос | |||
| техн | |||
| ун-та, 2013. | |||

