Изобретение относится к области машиностроения, а именно к шестизвенным шарнирным механизмам, осуществляющим в машинных агрегатах преобразование вращательного движения ведущего звена в прямолинейное движение ведомой чертящей точки.
Известные шестизвенные шарнирные механизмы, предназначенные для преобразования вращательного движения ведущего звена в прямолинейное движение чертящей точки, обладают низкой точностью воспроизведения прямолинейной траектории чертящей точки. Низкая точность воспроизведения прямой линии обусловлена нарушением стабильности исходной кинематической схемы механизма из-за интенсивного накопления зазоров в шарнирных соединениях при поворотно-колебательном движении ведущего звена.
Известен шестизвенный шарнирный механизм, звенья которого перемещаются в одной плоскости [1]. Механизм содержит стойку и пять подвижных звеньев: ведущее звено, двуплечее коромысло, двуплечий шатун и два поводка.
Все звенья механизма соединены между собой одноподвижными шарнирами.
Ведущее звено одним концом соединено со стойкой, другим - с двуплечим шатуном в точке разделения плеч шатуна. Двуплечий шатун одним концом соединен с первым поводком, другим - с одним концом двуплечего коромысла. Другой конец коромысла связан со вторым поводком. При этом коромысло в точке разделения его плеч соединено со стойкой. Соединенные между собой поводки образуют диаду.
Длины коромысла, шатуна и поводков выбраны таким образом, что при соединении эти звенья образуют шарнирный антипараллелограмм. Прямая, проходящая через точки разделения плеч шатуна и плеч коромысла, параллельна диагоналям антипараллелограмма. Длина ведущего звена равна длине стойки.
Второй поводок выполняет функцию ведомого звена механизма. С ведомым звеном неизменно связана чертящая точка, которая расположена на пересечении этого поводка с вышеуказанной прямой, параллельной диагоналям антипараллелограмма.
Известный механизм работает следующим образом. Ведущее звено совершает поворотные колебания относительно стойки. Движение ведущего звена передается двуплечему шатуну, а от него коромыслу и первому поводку. При этом второй поводок (ведомое звено) совершает сложное плоскопараллельное движение, а принадлежащая ему чертящая точка перемещается по прямой, перпендикулярной стойке.
Ход чертящей точки по прямой линии имеет малую протяженность по сравнению с длинами звеньев механизма, что является недостатком известного механизма.
Кроме того, механизм имеет низкую точность воспроизведения прямой линии чертящей точкой из-за поворотно-колебательного движения ведущего звена, приводящего к нарушению стабильности исходной кинематической схемы механизма.
Наиболее близким по технической сущности и достигаемому результату является шестизвенный шарнирный механизм, звенья которого перемещаются в разных плоскостях [2].
Механизм содержит четыре поводка и два промежуточных звена.
Все звенья механизма попарно связаны одноподвижными шарнирами, расположенными на концах звеньев. Четыре поводка образуют две диады. Первое промежуточное звено соединяет концы первых поводков обеих диад, а второе промежуточное звено - концы вторых поводков этих диад. При этом образуется замкнутый шарнирный шестиугольник.
Оси шарниров каждой диады взаимно параллельны. Каждая диада расположена в своей плоскости, причем плоскости двух диад механизма пересекаются. Промежуточные звенья расположены по линии пересечения этих плоскостей. Угол между осями шарниров каждого промежуточного звена равен углу между плоскостями диад.
Первый поводок первой диады выполняет функцию ведущего звена механизма, первое промежуточное звено - функцию стойки, а второе - функцию ведомого звена, одна из точек которого является чертящей точкой.
Известный пространственный шестизвенный шарнирный механизм работает следующим образом.
В соответствии с кинематической схемой механизма ведущее звено совершает поворотно-колебательное движение в полуплоскости, ограниченной линией пересечения плоскостей первой и второй диад. При повороте ведущего звена движение передается посредством второго поводка первой диады ведомому звену и от него - поводкам второй диады. Из-за перпендикулярности осей шарниров первой диады к ее плоскости ведомое звено перемещается в плоскости первой диады. Из-за перпендикулярности осей шарниров второй диады к ее плоскости ведомое объект перемещается в плоскости второй диады. Результирующим движением ведомого звена является поступательное движение по виртуальной линии пересечения указанных плоскостей. Связанная с ведомым звеном чертящая точка воспроизводит прямолинейную траекторию, совпадающую с линией пересечения этих плоскостей.
Наибольший ход чертящей точки по прямой линии составляет две длины ведущего звена, что значительно превышает протяженность хода чертящей точки у механизма-аналога.
Однако механизм, как и аналог, имеет низкую точность воспроизведения прямой линии чертящей точкой из-за нарушения стабильности исходной кинематической схемы, обусловленного поворотно-колебательным движением ведущего звена. При таком движении ведущего звена за один цикл работы механизма дважды происходит изменение направления его движения. Шарниры на ведущем звене работают в условиях знакопеременного динамического нагружения ударного типа, что приводит к интенсивному накоплению в них зазоров. Накопление зазоров вызывает искажение исходной кинематической схемы механизма и, как следствие, снижение точности воспроизведения прямолинейной траектории чертящей точки.
Задача, решаемая изобретением, заключается в создании пространственного шестизвенного шарнирного механизма, имеющего высокую точность воспроизведения прямой линии, обусловленную сохранением стабильности исходной кинематической схемы механизма за счет перераспределения функционального назначения звеньев и изменения соотношений между размерами звеньев, обеспечивающих возможность совершения полнооборотного вращения ведущего звена относительно стойки при одновременном сохранении значительной протяженности хода чертящей точки.
Для решения поставленной задачи в шестизвенном шарнирном механизме, содержащем четыре поводка, образующих две диады, соединенные между собой двумя промежуточными звеньями, причем звенья механизма попарно связаны одноподвижными шарнирами, первый поводок первой диады является ведущим звеном, оси шарниров первой диады перпендикулярны осям шарниров второй диады, оси внешних шарниров первой диады расположены в плоскости второй диады, а чертящая точка связана с одним из звеньев механизма, второй поводок первой диады выполнен неподвижным, первый поводок второй диады является ведомым звеном механизма, внутренний шарнир второй диады расположен в средней точке первого поводка, свободный конец которого выполнен с чертящей точкой, каждое промежуточное звено совмещено с осью соответствующего внешнего шарнира первой диады, причем длина первого поводка первой диады меньше длины ее второго поводка, длина второго поводка второй диады равна половине длины ее первого поводка, сумма половины длины первого поводка и длины второго поводка второй диады больше суммы длин поводков первой диады, а промежуточные звенья имеют равные длины.
Новое функциональное назначение звеньев механизма и новый выбор их длин позволяет сохранить стабильность исходной кинематической схемы и обеспечить высокую точность воспроизведения прямой линии чертящей точкой. Это является следствием полнооборотного вращения ведущего звена благодаря существенным отличительным признакам заявляемого механизма. При полнооборотном вращении ведущего звена его шарниры работают в условиях постоянной по направлению динамической нагрузки, что исключает возникновение ударов в шарнирах, и, как следствие, обеспечивает снижение интенсивности накопления в них зазоров. Это способствует длительному сохранению стабильности исходной кинематической схемы механизма и обеспечению высокой точности воспроизведения прямой линии чертящей точкой. Вышеуказанный результат логически вытекает из уровня техники.
Результат, явно не вытекающий из уровня техники, заключается в следующем. Неочевидно, что при полнооборотном вращении ведущего звена в пространственном шестизвенном шарнирном механизме чертящая точка ведомого звена, совершающего сложное пространственное движение, воспроизводит значительную по протяженности прямолинейную траекторию. Это обусловлено тем, что в соответствии с принятой кинематической схемой механизма ведомое звено с чертящей точкой участвует в двух движениях. Во-первых, ведомое звено движется в плоскости своей диады, во-вторых, ведомое звено совершает поворот вокруг неподвижной оси вместе с плоскостью своей диады.
При движении ведомого звена в плоскости своей диады его точки описывают разные траектории. Центр первого внешнего шарнира второй диады движется по прямой, соединяющей центры внешних шарниров этой диады. Центр среднего шарнира ведомого звена движется по дуге окружности с центром во втором внешнем шарнире второй диады. При этом ведомое звено движется в плоскости диады, как ведомое звено эллипсографа, а чертящая точка на свободном конце ведомого звена в соответствии со свойствами эллипсографа движется по прямой, совпадающей с осью вращения плоскости диады, и имеет при этом значительную протяженность полезного хода.
Участие ведомого звена в поворотных колебаниях вместе с плоскостью своей диады вокруг неподвижной оси не влияет на движение чертящей точки.
На чертеже изображена схема пространственного шестизвенного шарнирного механизма.
Шестизвенный шарнирный механизм содержит четыре поводка 1, 2, 3, 4 и два промежуточных звена 5, 6. Звенья механизма попарно соединены одноподвижными шарнирами 7, 8...12. Поводки 1 и 2 образуют первую диаду, а поводки 3 и 4 - вторую диаду. Промежуточное звено 5 соединяет концы первых поводков 1 и 3 обеих диад, а промежуточное звено 6 - концы вторых поводков 2 и 4 этих диад.
Оси шарниров 7, 8, 9 первой диады перпендикулярны осям шарниров 10, 11, 12 второй диады. Оси внешних шарниров 7, 9 первой диады, кроме того, расположены в плоскости второй диады. При этом ось шарнира 7 выполняет функцию неподвижной оси вращения для плоскости второй диады. Оси концевых шарниров каждого промежуточного звена взаимно перпендикулярны.
Первый поводок 1 первой диады соединен с приводом (не показан) во внутреннем шарнире 8 этой диады и выполняет функцию ведущего звена - кривошипа. Второй поводок 2 первой диады выполнен неподвижным и выполняет функцию стойки. Первый поводок 3 второй диады выполняет функцию ведомого звена, его свободный конец выполнен с чертящей точкой 13. Второй поводок 4 второй диады соединен с первым поводком 3 этой диады в его средней точке. Промежуточные звенья 5 и 6 совмещены с осями внешних шарниров 9 и 7 первой диады.
Длина первого поводка 1 первой диады меньше длины второго поводка 2 этой диады. Длина второго поводка 4 второй диады равна половине длины первого поводка 3 этой диады. Сумма половины длины первого поводка 3 и длины второго поводка 4 второй диады больше суммы длин поводков 1 и 2 первой диады. Промежуточные звенья 5 и 6 имеют равные длины.
При выбранной ориентации осей шарниров 8, 9 и принятому функциональному назначению поводков 1 и 2 первой диады плоскость этой диады неподвижна в любом положении механизма. При выбранной ориентации осей шарниров 7, 9, осей шарниров 10, 11, 12 и принятом расположении промежуточных звеньев 5, 6 подвижная плоскость второй диады перпендикулярна плоскости первой диады в любом положении механизма.
В соответствии с выбранной кинематической схемой механизма и принятыми соотношениями между длинами звеньев центр шарнира 10 занимает фиксированное положение на неподвижной оси вращения плоскости второй диады; прямая, соединяющая центры шарниров 10, 12, перпендикулярна оси вращения плоскости второй диады, а чертящая точка 13 лежит на этой оси в любом положении механизма. Протяженность L хода чертящей точки 13 по оси вращения плоскости второй диады определяется формулой

где  1,
1,  2 и
2 и  3 - длины поводков 1, 2 и 3.
3 - длины поводков 1, 2 и 3.
Соответствующим подбором длин поводков 1, 2 и 3 обеспечивается необходимая длина полезного хода чертящей точки 13.
При описании работы шестизвенного шарнирного механизма принято, что начало системы координат XYZ совмещено с центром шарнира 7, при этом ось Х направлена по оси шарнира 7, ось Y совпадает с поводком 2.
В начале цикла кривошип 1 совмещен с осью Y, а центр его внешнего шарнира 9 находится в точке А. В этом положении механизма первое промежуточное звено 5 совмещено с прямой АВ, параллельной оси X, плоскость второй диады совпадает с плоскостью XY, а чертящая точка 13 расположена на оси Х в максимальном удалении от центра шарнира 10, соединяющего второе промежуточное звено 6 с поводком 4 второй диады.
При повороте кривошипа 1 вокруг оси внутреннего шарнира 8 первой диады по ходу часовой стрелки центр внешнего шарнира 9 перемещается по окружности, лежащей в плоскости YZ, а центр внешнего шарнира 12 второй диады - по идентичной окружности в плоскости, параллельной YZ. В первой половине цикла расстояние между центрами внешних шарниров 7 и 9 первой диады, а также между центрами внешних шарниров 10 и 12 второй диады увеличивается. С поворотом кривошипа 1 плоскость второй диады поворачивается вокруг оси Х против хода часовой стрелки. Одновременно поводки 3 и 4 этой диады движутся в плоскости диады, при этом чертящая точка 13 смещается по оси Х в направлении к центру шарнира 10. В момент, когда кривошип 1 займет положение, перпендикулярное прямой, соединяющей центры внешних шарниров 7 и 9 первой диады, плоскость второй диады повернется вокруг оси Х на максимальный угол. При дальнейшем повороте кривошипа 1 вращение плоскости второй диады вокруг оси Х происходит по ходу часовой стрелки. В конце первой половины цикла плоскость второй диады совместится с плоскостью XY, чертящая точка 13 приблизится к центру шарнира 10 на минимальное расстояние.
Во второй половине цикла расстояние между центрами внешних шарниров 7 и 9 первой диады уменьшается, плоскость второй диады продолжает поворот вокруг оси Х по ходу часовой стрелки, а ее поводки 3 и 4 совершают движения, противоположные по направлению соответствующим движениям первой половины цикла. В момент, когда кривошип 1 займет положение, перпендикулярное прямой, соединяющей во второй половине цикла центры шарниров 7 и 9, плоскость второй диады повернется вокруг оси Х на максимальный угол. Далее эта плоскость поворачивается против хода часовой стрелки, а в конце цикла восстанавливается начальное положение всех звеньев механизма.
Таким образом, при полнооборотном вращении ведущего звена - кривошипа 1 поводки 3 и 4 второй диады одновременно участвуют в двух движениях, одно из них происходит в плоскости диады, а другое - вместе с поворотом этой плоскости вокруг оси X. Плоскость второй диады за полный оборот кривошипа 1 совершает полное поворотное колебание относительно оси X. Движение второй диады в своей плоскости соответствует движению эллипсографа в первой четверти его полного цикла, причем движение поводка 3 аналогично движению ведомого звена эллипсографа, а чертящая точка 13, расположенная на свободном конце поводка 3, в соответствии со свойством эллипсографа движется по оси X.
При вращении кривошипа 1 его шарниры 8 и 9 работают в условиях постоянной по направлению динамической нагрузки, что исключает возникновение ударов в этих шарнирах и, как следствие, обеспечивает снижение интенсивности накопления в них зазоров, способствует длительному сохранению стабильности исходной кинематической схемы механизма.
Использование заявляемого шестизвенного шарнирного механизма позволяет получить более точное по сравнению с прототипом воспроизведение прямолинейной траектории чертящей точки при сохранении значительной длины ее хода.
Источники информации
1. Рузинов Л.Д. Проектирование механизмов точными методами. - Ленинград: Машиностроение. 1972. - С.18-22.
2. Мудров П.Г. Пространственные механизмы с вращательными парами. - Казань: Изд-во Казанского университета, 1976, - С.215-216.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОСТРАНСТВЕННЫЙ ШАРНИРНЫЙ НАПРАВЛЯЮЩИЙ МЕХАНИЗМ | 2008 |
|
RU2404385C2 |
| КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ | 1996 |
|
RU2110718C1 |
| ШАРНИРНЫЙ ПРЯМОЛИНЕЙНО НАПРАВЛЯЮЩИЙ МЕХАНИЗМ | 1993 |
|
RU2075672C1 |
| МНОГОКРАТНЫЙ ШАРНИРНЫЙ ПАРАЛЛЕЛОГРАММ | 2006 |
|
RU2331805C1 |
| ДВУХОСНАЯ ЛОКОМОТИВНАЯ ТЕЛЕЖКА С РАДИАЛЬНОЙ УСТАНОВКОЙ КОЛЕСНЫХ ПАР | 2005 |
|
RU2291079C1 |
| ОППОЗИТНЫЙ КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ | 1998 |
|
RU2149298C1 |
| ШЕСТИЗВЕННЫЙ ШАРНИРНО-РЫЧАЖНЫЙ МЕХАНИЗМ | 2019 |
|
RU2713662C1 |
| СДВОЕННЫЙ ПОЛЗУННО-КОРОМЫСЛОВЫЙ МЕХАНИЗМ | 1991 |
|
RU2051303C1 |
| ТРЕХЩЕКОВАЯ ДРОБИЛЬНАЯ МАШИНА | 2011 |
|
RU2478433C1 |
| РЫЧАЖНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМ ДЛИТЕЛЬНЫМ ВЫСТОЕМ | 2023 |
|
RU2836248C1 |
Шестизвенный шарнирный механизм относится к области машиностроения, а именно к шестизвенным шарнирным механизмам, осуществляющим в машинных агрегатах преобразование вращательного движения ведущего звена в прямолинейное движение ведомой чертящей точки. Шарнирный механизм содержит четыре поводка, образующих две диады, соединенные между собой двумя промежуточными звеньями. Звенья механизма попарно связаны одноподвижными шарнирами. Первый поводок первой диады является ведущим звеном. Оси шарниров первой диады перпендикулярны осям шарниров второй диады. Оси внешних шарниров первой диады расположены в плоскости второй диады. Чертящая точка связана с одним из звеньев механизма. Второй поводок первой диады выполнен неподвижным. Первый поводок второй диады является ведомым звеном механизма. Внутренний шарнир второй диады расположен в средней точке первого поводка, свободный конец которого выполнен с чертящей точкой. Каждое промежуточное звено совмещено с осью соответствующего внешнего шарнира первой диады, причем длина первого поводка первой диады меньше длины ее второго поводка. Длина второго поводка второй диады равна половине длины ее первого поводка. Сумма половины длины первого поводка и длины второго поводка второй диады больше суммы длин поводков первой диады, а промежуточные звенья имеют равные длины. Достигается высокая точность воспроизведения прямой линии за счет перераспределения функционального назначения звеньев. 1 ил.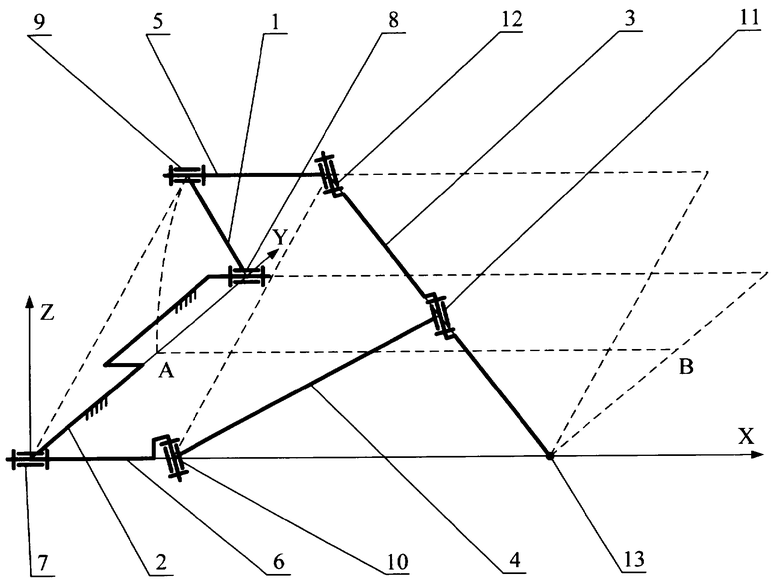
Шестизвенный шарнирный механизм, содержащий четыре поводка, образующих две диады, соединенные между собой двумя промежуточными звеньями, причем звенья механизма попарно связаны одноподвижными шарнирами, первый поводок первой диады является ведущим звеном, оси шарниров первой диады перпендикулярны осям шарниров второй диады, оси внешних шарниров первой диады расположены в плоскости второй диады, а чертящая точка связана с одним из звеньев механизма, отличающийся тем, что второй поводок первой диады выполнен неподвижным, первый поводок второй диады является ведомым звеном механизма, внутренний шарнир второй диады расположен в средней точке первого поводка, свободный конец которого выполнен с чертящей точкой, каждое промежуточное звено совмещено с осью соответствующего внешнего шарнира первой диады, причем длина первого поводка первой диады меньше длины ее второго поводка, длина второго поводка второй диады равна половине длины ее первого поводка, сумма половины длины первого поводка и длины второго поводка второй диады больше суммы длин поводков первой диады, а промежуточные звенья имеют равные длины.
| Мудров П.Г | |||
| Пространственные механизмы с вращательными парами | |||
| - Казань: Издательство Казанского университета, 1976, с.215-216 | |||
| Кулачково-рычажный механизм | 1985 |
|
SU1307135A1 |
| Стенд гармонических колебаний | 1990 |
|
SU1740829A1 |
| RU 2058504 С1, 20.04.1996 | |||
| US 2005081673 A, 21.04.2005. | |||

