Изобретение относится к области машиностроения и может быть использовано для синтеза пространственного шестизвенного механизма с трехмерным движением.
Пространственные шестизвенные шарнирные системы обладают уникальной способностью складываться в плоскую конструкцию. Получение новых подвижных пространственных механизмов является актуальной задачей.
Известно, что кинематическая замкнутая цепь с шестью вращательными кинематическими парами представляет в общем случае жесткую систему (Верховский А.В. Шестизвенные пространственные шарнирные механизмы // Известия Томского политехнического института имени С.М. Кирова, т. 61, вып. 1. 1947. - С. 47-52). Это значит, что в общем случае шестизвенная шарнирная система механизмом быть не может.
Из указанного источника информации известно также, что при соблюдении некоторых частных условий шестизвенная шарнирная система, составленная в виде простой замкнутой кинематической цепи, приобретает одну степень подвижности, т.е. является механизмом. Так, например, существует шестизвенный механизм с вращательными кинематическими парами, у которого оси шарниров образуют два пучка пересекающихся осей, по три оси в каждом.
В этом же источнике информации описан способ синтеза шестизвенного пространственного механизма с вращательными кинематическими парами, имеющего плоскость симметрии, при котором составляется конфигурация желаемого симметричного механизма в одном произвольном положении. В силу симметрии, в которой плоскость симметрии проходит через оси шарниров, конфигурация будет механизмом.
Недостатком известного способа синтеза шестизвенного пространственного механизма является ограниченность области применения способа, реализующегося лишь в конфигурациях, имеющих плоскость симметрии.
Известен пространственный механизм с вращательными кинематическими парами (механизм Брикара), состоящий из шести звеньев, соединенных между собой с помощью шести шарниров (Галиуллин И. А. Синтез подвижных шестизвенных механизмов [Текст] / И. А. Галиуллин, М. Г. Яруллин // Проблемы и перспективы развития авиации, наземного транспорта и энергетики «АНТЭ - 2013»: Международная научно-техническая конференция, 19-21 ноября 2013 г.: Сборник докладов, Казань: Из-во Казан, гос. техн. ун-та, 2013. - С 23-31). Базовой фигурой, на которой построен механизм Брикара, является куб.
В последнем источнике информации описан способ синтеза шестизвенного пространственного механизма с вращательными кинематическими парами, включающий поиск положений звеньев кинематических пар, при которых кинематическая цепь переходит в замкнутое состояние путем циклического повторения определения оптимального положения для каждого звена кинематической цепи, при котором механизм наиболее близок к замкнутому состоянию.
Недостатком указанного способа синтеза шестизвенного пространственного механизма является его повышенная трудоемкость. Кроме этого отсутствует гарантия того, что после замыкания кинематической цепи шестизвенная шарнирная система приобретет одну степень подвижности, т.е. станет механизмом.
Задачей изобретения является снижение трудоемкости способа синтеза пространственного шестизвенного механизма с вращательными кинематическими парами и обеспечения подвижности его.
Технический результат, на достижение которого направлено изобретение, заключается в снижении трудоемкости способа синтеза и обеспечении подвижности пространственного шестизвенного механизма с вращательными кинематическими парами.
Технический результат достигается тем, что в способе синтеза шестизвенного пространственного механизма с вращательными кинематическими парами, заключающемся в поиске положений звеньев кинематических пар, при которых кинематическая цепь переходит в замкнутое состояние, в одной или в трех кинематических парах кинематической цепи звенья сопрягают между собой в ориентации. обратной (противоположной) по отношению к ориентации звеньев в других кинематических парах.
Технический результат достигается тем, что в способе синтеза шестизвенного пространственного механизма с вращательными кинематическими парами, заключающемся в поиске положений звеньев кинематических пар, при которых кинематическая цепь переходит в замкнутое состояние, кинематическую цепь выполняют из одного или трех звеньев в виде зеркальной копии остальных звеньев, а звенья в кинематических парах сопрягают между собой в одинаковой ориентации.
Технический результат достигается тем, что пространственный шестизвенный механизм с вращательными кинематическими парами, состоящий из звеньев в виде стержней с шарнирами, в одной или в трех кинематических парах кинематической цепи звенья сопряжены между собой в ориентации, обратной (противоположной) по отношению к ориентации звеньев в других кинематических парах.
Технический результат достигается тем, что пространственный шестизвенный механизм с вращательными кинематическими парами, состоящий из звеньев в виде стержней с шарнирами, кинематическая цепь содержит одно или три звена в виде зеркальной копии остальных звеньев, а звенья в кинематических парах сопряжены между собой в одинаковой ориентации.
Технический результат достигается тем, что пространственный шестизвенный механизм с вращательными кинематическими парами, состоящий из звеньев в виде стержней с шарнирами, содержит кинематические пары, в которых звенья сопряжены между собой с возможностью изменения своей ориентации на обратную (противоположную) ориентацию.
Предложенный способ синтеза пространственной шестизвенной шарнирной системы в соответствии с техническим решением изобретении менее трудоемкий и обеспечивает подвижность механизма.
Для пояснения технической сущности рассмотрим чертежи, на которых:
фиг. 1 - схематическое изображение пространственного шестизвенного механизма с вращательными кинематическими парами в соответствии с изобретением;
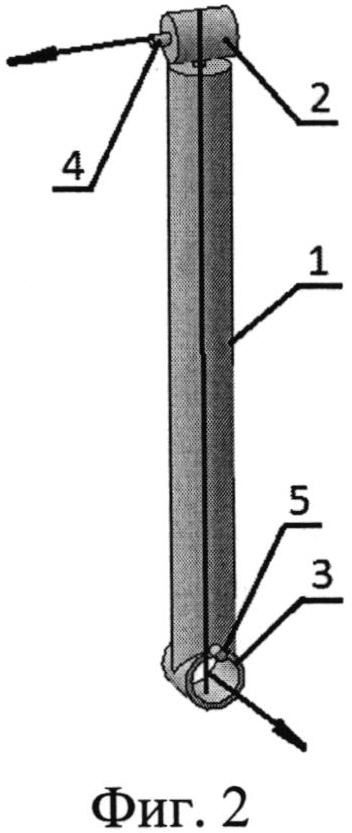
фиг. 2 - схематическое изображение звена кинематической пары;
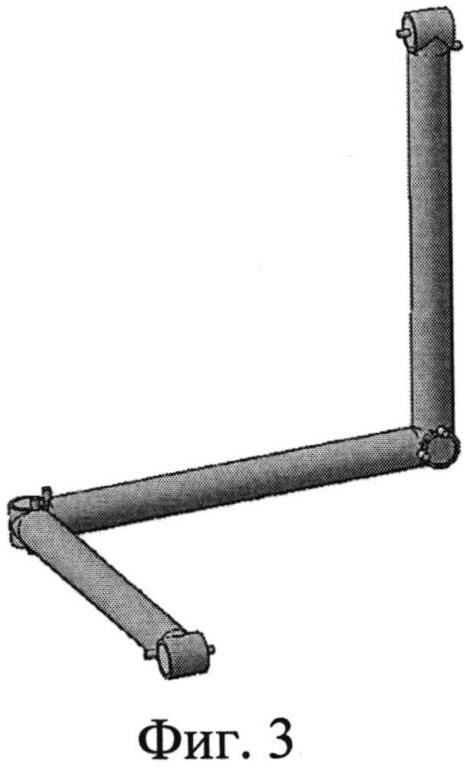
фиг. 3 - схематическое изображение пространственного шестизвенного механизма с вращательными кинематическими парами, построенного при одинаковой ориентации звеньев в кинематических парах;
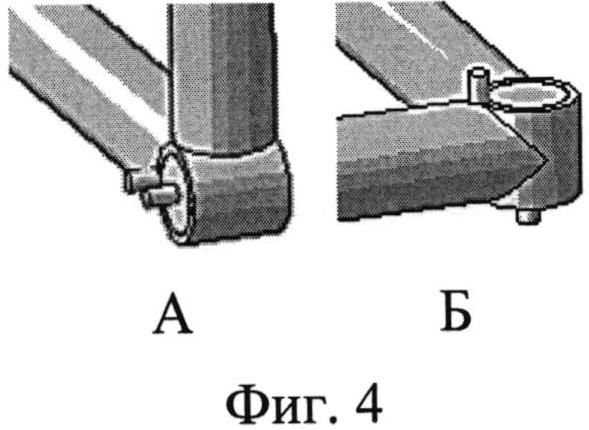
фиг. 4 - схематическое изображение прямой (А) и обратной (Б) ориентации звеньев в кинематической паре;
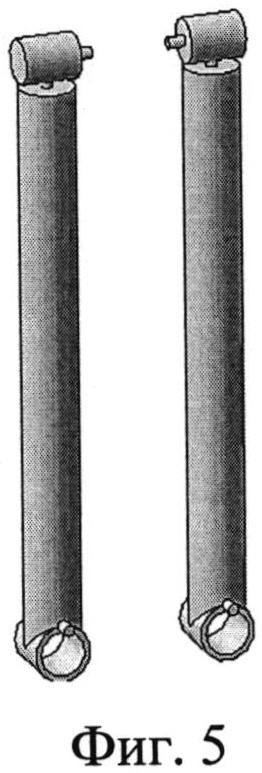
фиг. 5 - схематическое изображение зеркально подобных звеньев, где:
1 - стержни;
2 - внутренний элемент шарнира;
3 - наружный элемент шарнира;
4 - цилиндрический выступ на внутреннем элементе шарнира;
5 - цилиндрический выступ на наружном элементе шарнира.
Пространственный шестизвенный механизм с вращательными кинематическими парами, показанный на фиг. 1, состоит из шести звеньев, соединенных между собой с помощью шести шарниров. Базовой фигурой, на которой построен механизм, является куб. Звено кинематической пары, показанное на фиг. 2, состоит из стержня 1, внутреннего элемента шарнира 2, наружного элемента шарнира 3. Оси симметрии стержня 1, элементов шарнира 2 и 3 взаимно перпендикулярны. Цилиндрический выступ 4 на внутреннем элементе шарнира 2 условно показывает положительное направление оси вращения внутреннего элемента шарнира 2. Цилиндрический выступ 5 на наружном элементе шарнира 3 условно показывает положительное направление оси вращения наружного элемента шарнира 3.
При сопряжении внутреннего и наружного элементов шарнира в кинематической паре звенья ориентируются относительно друг друга в двух возможных вариантах:
- условно прямая ориентация - когда направления осей вращения внутреннего 2 и наружного элементов шарнира 3 совпадают (см. фиг. 4 А);
- условно обратная ориентация - когда направления осей вращения внутреннего 2 и наружного элементов шарнира 3 совпадают (см. фиг. 4 Б).
Способ синтеза шестизвенного пространственного механизма с вращательными кинематическими парами в соответствии с изобретением осуществляется в следующем порядке. Составляется кинематическая цепь из вращательных кинематических пар, звенья в которых сопрягают между собой в желаемой ориентации. Затем при замыкании кинематической цепи звенья в замыкающей кинематической паре сопрягают таким образом, чтобы в одной или в трех кинематических парах кинематической цепи звенья были сопряжены между собой в ориентации. обратной (противоположной) по отношению к ориентации звеньев в других кинематических парах. Указанный порядок осуществления синтеза пространственного шестизвенного механизма показан на фиг. 1.
В другом варианте синтез шестизвенного пространственного механизма с вращательными парами в соответствии с изобретением осуществляется в следующем порядке. Составляется кинематическая цепь из вращательных кинематических пар, в которых звенья сопрягают между собой в определенной ориентации. Затем при замыкании кинематической цепи используют одно или три звена в виде зеркальной копии остальных звеньев и сопрягают их в кинематических парах в той же ориентации. Такой вариант осуществления способа синтеза пространственного шестизвенного механизма показан также на фиг. 1.
В еще одном варианте пространственный шестизвенный механизм содержит кинематические пары, в которых звенья сопряжены между собой с возможностью изменения своей ориентации на обратную (противоположную) ориентацию. Пространственный шестизвенный механизм с вращательными кинематическими парами, в которых звенья сопряжены между собой с возможностью изменения своей ориентации на обратную (противоположную) ориентацию, показан на фиг. 1 и 3.
Пространственный шестизвенный механизм, показанный на фиг. 1, построен в соответствии с предлагаемым способом.
Пространственный шестизвенный механизм, показанный на фиг. 3, построен при одинаковой (прямой или обратной) ориентации звеньев в кинематических парах кинематической цепи. Это достигнуто за счет изменения при необходимости в кинематических парах ориентации звеньев на требуемую ориентацию. Видно, что шестизвенная шарнирная система (механизм) вырождена в трехзвенную шарнирную систему (механизм). Это дает по сравнению с известными аналогами преимущество - снижение трудоемкости способа синтеза и обеспечения подвижности шестизвенного механизма, т.е. возможность преобразования пространственной конструкции механизма в одномерную конструкцию.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОСТРАНСТВЕННЫЙ ШЕСТИЗВЕННЫЙ МЕХАНИЗМ С ВРАЩАТЕЛЬНЫМИ КИНЕМАТИЧЕСКИМИ ПАРАМИ | 2014 |
|
RU2566323C1 |
| Способ синтеза пространственного механизма | 2016 |
|
RU2619152C1 |
| СЕТЧАТАЯ ОБОЛОЧКА | 2017 |
|
RU2665338C1 |
| ШЕСТИЗВЕННЫЙ ШАРНИРНЫЙ МЕХАНИЗМ | 2007 |
|
RU2338104C1 |
| СПОСОБ ПОЛУЧЕНИЯ СТЕРЕОПАРЫ | 2006 |
|
RU2339985C2 |
| СПОСОБ УТИЛИЗАЦИИ ПОПУТНОГО НЕФТЯНОГО ГАЗА И ЭНЕРГЕТИЧЕСКАЯ МАШИНА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2447363C1 |
| СПОСОБ УТИЛИЗАЦИИ ПОПУТНОГО НЕФТЯНОГО ГАЗА И ЭНЕРГЕТИЧЕСКАЯ МАШИНА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2488705C1 |
| ШЕСТИЗВЕННЫЙ ШАРНИРНО-РЫЧАЖНЫЙ МЕХАНИЗМ | 2019 |
|
RU2713662C1 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ ДЛЯ МИКРОПОЗИЦИОНИРОВАНИЯ | 2018 |
|
RU2674357C1 |
| РЕЗЦОВАЯ ГОЛОВКА ДЛЯ УДАЛЕНИЯ ВНУТРЕННЕГО ГРАТА В ЭЛЕКТРОСВАРНЫХ ТРУБАХ | 2014 |
|
RU2595163C2 |
Изобретение относится к области машиностроения и может быть использовано для синтеза пространственного шестизвенного механизма с трехмерным движением. Способ синтеза шестизвенного механизма заключается в том, что в одной или в трех кинематических парах сопряжение звеньев осуществляют в обратной ориентации по отношению к ориентации звеньев в остальных кинематических парах, или три звена выполнены в виде зеркальной копии остальных звеньев, а звенья в кинематических парах сопрягают между собой в одинаковой ориентации. Пространственный шестизвенный механизм с вращательными кинематическими парами, состоящий из звеньев стержней (1) с внутренними элементами шарниров (2) и наружных элементов шарниров (3), в котором в одной или в трех кинематических парах звенья (1) сопряжены между собой в ориентации, обратной по отношению к ориентации звеньев в других кинематических парах; или одно или три звена выполнены в виде зеркальной копии остальных звеньев; или звенья могут изменять ориентацию. Достигается снижение трудоемкости способа синтеза и обеспечения подвижности. 5 н.п. ф-лы, 5 ил.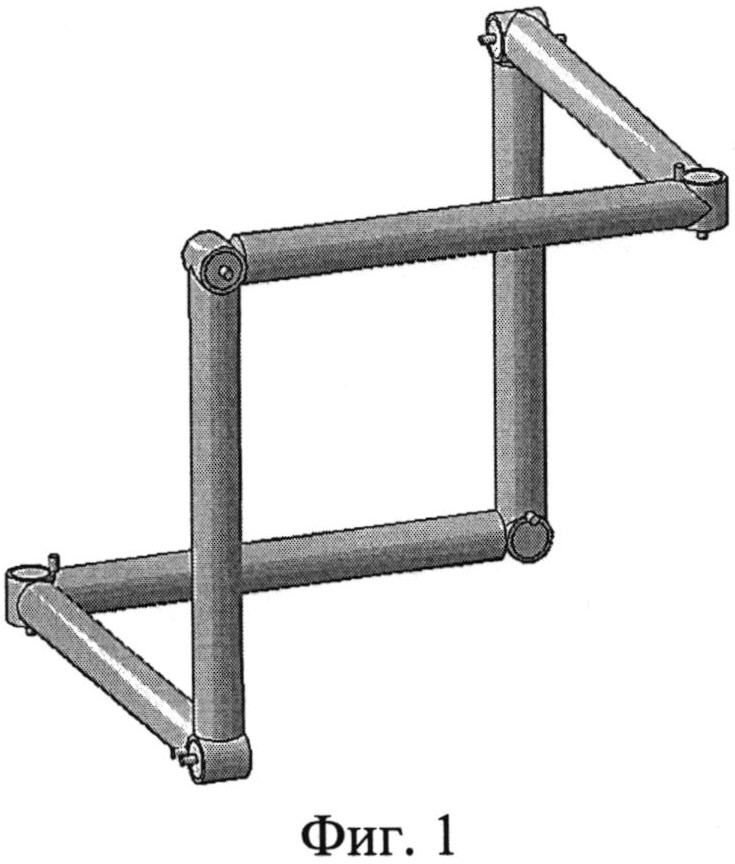
1. Способ синтеза шестизвенного пространственного механизма с вращательными кинематическими парами, заключающийся в поиске положений звеньев кинематических пар, при которых кинематическая цепь переходит в замкнутое состояние, отличающийся тем, что в одной или в трех кинематических парах кинематической цепи звенья сопрягают между собой в ориентации, обратной (противоположной) по отношению к ориентации звеньев в других кинематических парах.
2. Способ синтеза шестизвенного пространственного механизма с вращательными кинематическими парами, заключающийся в поиске положений звеньев кинематических пар, при которых кинематическая цепь переходит в замкнутое состояние, отличающийся тем, что кинематическую цепь выполняют из одного или трех звеньев в виде зеркальной копии остальных звеньев, а звенья в кинематических парах сопрягают между собой в одинаковой ориентации.
3. Пространственный шестизвенный механизм с вращательными кинематическими парами, состоящий из звеньев в виде стержней с шарнирами, отличающийся тем, что в одной или в трех кинематических парах кинематической цепи звенья сопряжены между собой в ориентации, обратной (противоположной) по отношению к ориентации звеньев в других кинематических парах.
4. Пространственный шестизвенный механизм с вращательными кинематическими парами, состоящий из звеньев в виде стержней с шарнирами, отличающийся тем, что кинематическая цепь содержит одно или три звена в виде зеркальной копии остальных звеньев, а звенья в кинематических парах сопряжены между собой в одинаковой ориентации.
5. Пространственный шестизвенный механизм с вращательными кинематическими парами, состоящий из звеньев в виде стержней с шарнирами отличающийся тем, что, содержит кинематические пары, в которых звенья сопряжены между собой с возможностью изменения своей ориентации на обратную (противоположную) ориентацию.
| "Синтез подвижных шестизвенных механизмов ", И | |||
| А | |||
| Галиуллин, М | |||
| Г | |||
| Яруллин, Проблемы и перспективы развития авиации, наземного транспорта и энергетики "АНТЭ - 2013": Международная научно-техническая конференция, 19-21 ноября 2013 г.: Сборник докладов, Казань: Из-во Казан, гос | |||
| техн | |||
| ун-та, 2013 | |||
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Способ и прибор для определения глубины залегания камней, пузырей и т.п. в кусках стекла | 1927 |
|
SU7687A1 |
| ПРИБОР ДЛЯ СИНТЕЗА ШЕСТИЗВЕННОГО КУЛИСНОГОМЕХАНИЗМА | 0 |
|
SU237396A1 |

