Изобретение относится к области измерительной техники, в частности к определению глубины проникания объекта в грунт.
Известен способ определения параметров проникания метаемого тела в преграду, заключающийся в том, что осуществляют метание сборки, содержащей метаемое тело, установленное в отделяемом поддоне с дном, измерительный узел, размещенный в метаемом теле, и, по меньшей мере, один провод узла электрической связи, соединенный одним концом с отделяемым поддоном, а другим - с измерительным узлом. В процессе метания сборки обеспечивается разъединение отделяемого поддона с метаемым телом на улавливателе поддона, подключенном через измерительные каналы линии электрической связи к регистрирующей аппаратуре, с одновременным осуществлением замыкания отделяемого поддона на указанный улавливатель поддона и производят регистрацию параметров проникания метаемого тела в преграду (патент РФ №2263297, МПК7 G01N 3/30, опубликован 27.10.2005, бюл. №30).
Недостатками способа определения параметров проникания метаемого тела в преграду являются:
- необходимость размещения в метаемом теле ударостойкой измерительной аппаратуры;
- необходимость обеспечения сохранности электрической связи между измерительной и регистрирующей аппаратурой в процессе проникания тела в преграду;
- возможность применения способа только при гарантированном попадании с высокой точностью метаемого тела в улавливатель поддона.
Наиболее близким техническим решением, выбранным в качестве прототипа, является способ определения параметров проникания объекта в грунт, используемый при работе зонда для исследования свойств грунта, содержащего корпус с размещенной в нем регистрирующей аппаратурой, отделяющийся хвостовик-стабилизатор с передающей радиоаппаратурой и узел проводной линии связи. Зонд сбрасывают с самолета или вертолета над исследуемой территорией. Под действием силы тяжести зонд разгоняется и внедряется в грунт. На начальном этапе внедрения происходит отделение от корпуса зонда хвостовика-стабилизатора. Хвостовик с передатчиком и антенной остается на поверхности. Корпус с заостренной носовой частью продолжает движение вглубь исследуемого массива. Разматывается кабель узла проводной линии связи. Регистрирующей аппаратурой, находящейся внутри корпуса, фиксируются параметры проникания (характеристики грунта). Информация по кабелю передается на аппаратуру хвостовика и далее - через антенну в виде радиосигналов - на внешнюю приемную аппаратуру (патент РФ №2111476, МПК6 G01N 3/30, опубликован 20.05.1998).
Используя полученную информацию, например значения действующих на зонд перегрузок в зависимости от времени, может быть получена глубина проникания зонда в грунт.
Недостатками способа, используемого при работе зонда для исследования свойств грунта, являются:
- необходимость размещения в корпусе зонда ударостойкой измерительной аппаратуры;
- необходимость использования ударостойкой радиопередающей аппаратуры (передатчика и антенны) в хвостовике-стабилизаторе;
- необходимость обеспечения сохранности кабеля проводной линии связи измерительной и передающей аппаратурой в процессе проникания тела в преграду, что является сложной технической задачей и затруднительно при проникании тел в преграды (в т.ч. грунты различной плотности) с высокими начальными скоростями и на значительные глубины.
Технической задачей, решаемой с помощью предлагаемого способа, является определение глубины проникания объекта в грунт.
Технический результат:
- исключение необходимости размещения на борту объекта ударостойкой измерительной, регистрирующей и передающей аппаратуры и, соответственно, упрощение конструкции объекта, снижение его стоимости и, при необходимости, массогабаритных характеристик, а также повышение надежности измерений (снижение вероятности потери экспериментальных данных), необходимых для определения глубины проникания объекта в грунт;
- обеспечение многоразовости использования измерительной и регистрирующей аппаратуры.
Указанный технический результат достигается тем, что способ определения глубины проникания объекта в грунт включает сбрасывание объекта с носителя и регистрацию параметров его проникания. В отличие от прототипа в заявляемом способе в зоне вероятного падения объекта на расстоянии друг от друга размещают, по крайней мере, два сейсмических датчика. После сбрасывания объекта с носителя фиксируют время регистрации каждым датчиком сейсмической волны, возникающей в процессе проникания объекта в грунт. Измеряют расстояния от каждого датчика до точки падения объекта, определяют скорость распространения сейсмической волны в грунте вблизи места падения объекта и, затем, с учетом угла подхода объекта к поверхности земли и углов между проекцией траектории движения объекта на поверхность земли и направлениями от точки падения объекта до каждого датчика определяют с помощью аналитических вычислений или графическим построением глубину его проникания в грунт.
Размещение в зоне вероятного падения объекта на расстоянии друг от друга, по крайней мере, двух сейсмических датчиков, фиксация времени регистрации каждым датчиком сейсмической волны, возникающей в процессе проникания объекта в грунт, измерение расстояний от каждого датчика до точки падения объекта и определение скорости распространения сейсмической волны в грунте вблизи места падения объекта в совокупности позволяют с учетом угла подхода объекта к поверхности земли и углов между проекцией траектории движения объекта на поверхность земли и направлениями от точки падения объекта до каждого датчика определить с помощью аналитических вычислений или графическим построением глубину проникания объекта в грунт после его сброса с носителя без размещения на его борту ударостойкой измерительной, регистрирующей и передающей аппаратуры. Что в итоге обеспечивает:
- упрощение конструкции объекта, снижение его стоимости и, при необходимости, массогабаритных характеристик;
- повышение надежности измерений (снижение вероятности потери экспериментальных данных), необходимых для определения глубины проникания объекта в грунт;
- многоразовость использования измерительной и регистрирующей аппаратуры.
Изобретение поясняется чертежами:
- на фиг. 1 представлена общая схема определения глубины проникания объекта в грунт;
- на фиг. 2 представлены условные графики регистрации сейсмической волны двумя датчиками в системе единого времени;
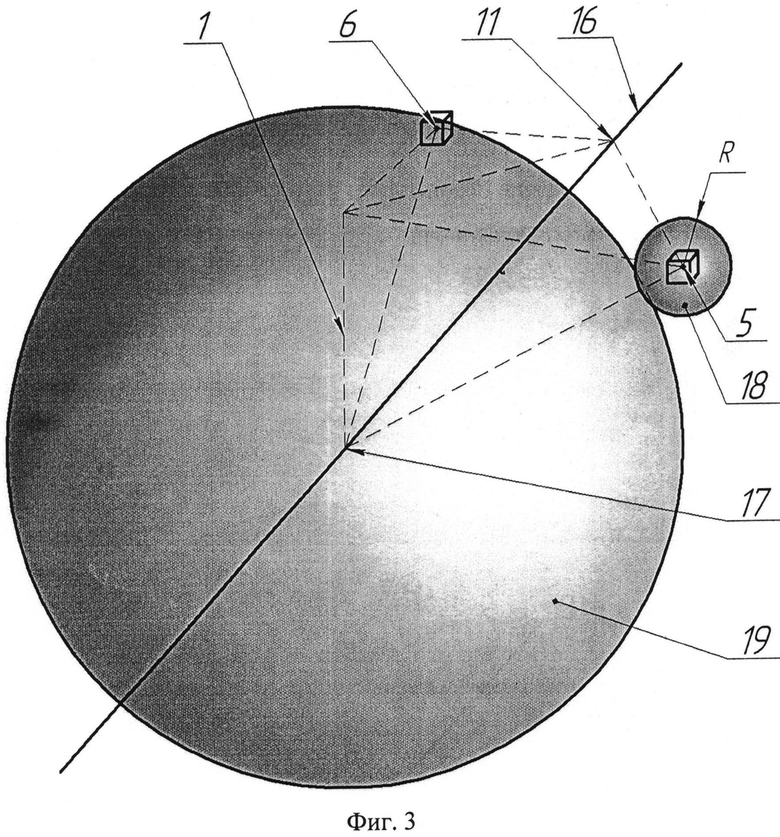
- на фиг. 3 представлена схема определения глубины проникания объекта в грунт графическим построением.
Способ определения глубины 1 проникания объекта 2 в грунт 3 включает размещение в зоне 4 вероятного падения объекта 2 на некотором расстоянии друг от друга, по крайней мере, двух сейсмических датчиков 5 и 6. После сброса объекта 2 с носителя 7 фиксируют время регистрации каждым датчиком 5 и 6 сейсмической волны 8, возникающей в процессе проникания объекта 2 в грунт 3. Измеряют расстояния 9 и 10 от каждого датчика 5 и 6 до точки 11 падения объекта 2. Определяют скорость распространения сейсмической волны 8 в грунте 3 вблизи места падения 11 объекта 2, затем с учетом угла 12 подхода объекта 2 к поверхности земли и углов 13, 14 между проекцией 15 траектории 16 движения объекта 2 на поверхность земли и направлениями 9, 10 от точки 11 падения объекта 2 до каждого датчика 5 и 6 определяют с помощью аналитических вычислений или графическим построением глубину 1 проникания объекта 2 в грунт 3.
Аналитическое вычисление глубины проникания 1 объекта 2 в грунт 3 осуществляется с использованием следующей системы уравнений:
где t1 - время прохождения сейсмической волны 8 от точки 11 падения объекта 2 до датчика 5;
t2 - время прохождения сейсмической волны 8 от точки 11 падения объекта 2 до датчика 6;
 - время регистрации сейсмической волны 8 датчиком 5;
- время регистрации сейсмической волны 8 датчиком 5;
 - время регистрации сейсмической волны 8 датчиком 6;
- время регистрации сейсмической волны 8 датчиком 6;
tпроник - время проникания баллистического объекта 2 в грунт 3;
 - время прохождения сейсмической волны 8 от точки максимального заглубления 17 объекта 2 до датчика 5;
- время прохождения сейсмической волны 8 от точки максимального заглубления 17 объекта 2 до датчика 5;
 - время прохождения сейсмической волны 8 от точки максимального заглубления 17 объекта 2 до датчика 6;
- время прохождения сейсмической волны 8 от точки максимального заглубления 17 объекта 2 до датчика 6;
V - скорость распространения сейсмической волны 8 в грунте 3 в районе точки 11 падения объекта 2;
H - глубина 1 проникания объекта 2 в грунт 3;
α - угол 12 подхода объекта 2 к поверхности земли;
X1 - расстояние 9 от датчика 5 до точки 11 падения объекта 2;
X2 - расстояние 10 от датчика 6 до точки 11 падения объекта 2;
β - угол 13 между проекцией 15 траектории 16 движения объекта 2 на поверхность земли и направлением 9 от точки падения 11 объекта 2 до датчика 5;
γ - угол 14 между проекцией 15 траектории 16 движения объекта 2 на поверхность земли и направлением 10 от точки 11 падения объекта 2 до датчика 6.
Глубина H и времена tпроник,  и
и  являются искомыми величинами, определяемыми в результате решения указанной системы уравнений. Остальные параметры могут быть определены, например, следующим образом.
являются искомыми величинами, определяемыми в результате решения указанной системы уравнений. Остальные параметры могут быть определены, например, следующим образом.
Скорость V распространения сейсмической волны может быть определена заблаговременно с помощью подрыва взрывчатого вещества в фиксированной точке в зоне вероятного падения объекта и измерения времени прихода сейсмической волны в точку, отстоящую от точки подрыва на известном (заданном) расстоянии.
Времена t1 и t2 могут быть определены по соотношениям:
Времена 
 определяются непосредственно по показаниям сейсмических датчиков.
определяются непосредственно по показаниям сейсмических датчиков.
Угол α может быть определен с помощью оптических средств регистрации полета объекта.
Расстояния X1, X2 и углы β, γ могут быть определены с помощью геодезических измерений.
Определение глубины 1 проникания объекта 2 в грунт 3 графическим построением осуществляется следующим образом.
С учетом масштаба производят пространственное построение точки 11 падения, траектории 16, точек расположения сейсмических датчиков 5 и 6.
Определяют величину R:

Если R>0, то строится первая сфера 18 радиусом R с центром в точке расположения датчика 5, если R<0, то строится первая сфера 18 радиусом |R| с центром в точке расположения датчика 6.
Строится вторая сфера 19 с центром на траектории 16, касательная к первой сфере 18 и проходящая через точку расположения датчика 6 (если R>0) или через точку расположения датчика 5 (если R<0).
Центр второй сферы 19 является точкой максимального заглубления 17 объекта 2, а расстояние от нее до плоскости, образованной точкой падения 11 и точками расположения сейсмических датчиков 5, 6, является глубиной проникания 1 объекта 2 в грунт 3.
Определение глубины проникания 1 объекта 2 в грунт 3 графическим построением, например, может осуществляться в CAD-системах 3D проектирования.
Использование предлагаемого способа позволяет:
- упростить конструкцию объекта, снизить его стоимость и, при необходимости, массогабаритные характеристики;
- повысить надежность измерений (снизить вероятность потери экспериментальных данных), необходимых для определения глубины проникания объекта в грунт;
- обеспечить многоразовость использования измерительной и регистрирующей аппаратуры.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО И СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ПРОНИКАНИЯ МЕТАЕМОГО ТЕЛА В ПРЕГРАДУ | 2004 |
|
RU2263297C1 |
| ЗОНД ДЛЯ ИССЛЕДОВАНИЯ ПРОЦЕССА ВЫСОКОСКОРОСТНОГО ПРОНИКАНИЯ В ПРЕГРАДУ | 2019 |
|
RU2729976C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МОМЕНТА ВСТРЕЧИ ОБЪЕКТА ИСПЫТАНИЯ С ПРЕГРАДОЙ | 2014 |
|
RU2547839C1 |
| УСТРОЙСТВО ПРОВОДНОЙ ЭЛЕКТРИЧЕСКОЙ СВЯЗИ ДЛЯ МЕТАЕМОГО ТЕЛА И СПОСОБ ИСПЫТАНИЙ МЕТАЕМЫХ ТЕЛ С НЕПРЕРЫВНОЙ РЕГИСТРАЦИЕЙ БАЛЛИСТИЧЕСКИХ ПАРАМЕТРОВ | 2005 |
|
RU2287756C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ПРОНИКАНИЯ УДАРНИКА В ГРУНТОВУЮ ПРЕГРАДУ | 2021 |
|
RU2768502C1 |
| СПОСОБ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ ПРИ ПОИСКЕ УГЛЕВОДОРОДОВ И СЕЙСМИЧЕСКИЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2431868C1 |
| Зонд для проникания в многослойную преграду | 2022 |
|
RU2794416C1 |
| СПОСОБ ГЕОХИМИЧЕСКОЙ РАЗВЕДКИ ДЛЯ ГЕОЭКОЛОГИЧЕСКОГО МОНИТОРИНГА МОРСКИХ НЕФТЕГАЗОНОСНЫХ АКВАТОРИЙ | 2012 |
|
RU2513630C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОБВОДНЕНИЯ В МНОГОПЛАСТОВОЙ ЗАЛЕЖИ ПУТЕМ РАЗДЕЛЕНИЯ ГРАВИТАЦИОННОГО ЭФФЕКТА ОТ ОБВОДНЕНИЯ КОЛЛЕКТОРОВ НА РАЗЛИЧНЫХ ГЛУБИНАХ С ИСПОЛЬЗОВАНИЕМ СЕЙСМОМЕТРИЧЕСКИХ НАБЛЮДЕНИЙ | 2023 |
|
RU2819120C1 |
| СПОСОБ ГЕОХИМИЧЕСКОЙ РАЗВЕДКИ | 2010 |
|
RU2456644C2 |
Изобретение относится к области измерительной техники и может быть использовано для определения глубины проникания объекта в грунт. Способ включает сбрасывание объекта с носителя и регистрацию параметров его проникания, по крайней мере, двумя сейсмическими датчиками, расположенными на расстоянии друг от друга в зоне вероятного падения объекта. Осуществляется фиксация времен регистрации каждым датчиком сейсмической волны, возникающей в процессе проникания объекта в грунт. Измеряются расстояния от каждого датчика до точки падения объекта. Определяется скорость распространения сейсмической волны в грунте вблизи места падения объекта. С учетом угла подхода объекта к поверхности земли и углов между проекцией траектории движения объекта на поверхность земли и направлениями от точки падения объекта до каждого датчика определяется с помощью аналитических вычислений или графическим построением глубина проникания объекта в грунт. Технический результат - повышение точности надежности измерений, необходимых для определения глубины проникания объекта в грунт. 3 ил.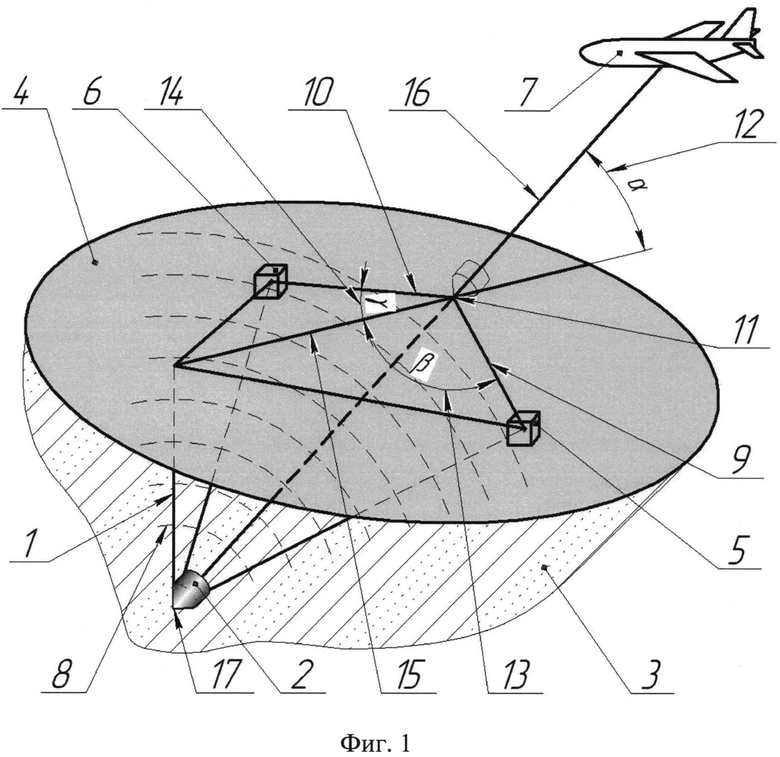
Способ определения глубины проникания объекта в грунт, включающий сбрасывание объекта с носителя, регистрацию параметров его проникания, отличающийся тем, что в зоне вероятного падения объекта на расстоянии друг от друга размещают, по крайней мере, два сейсмических датчика, после сбрасывания объекта с носителя фиксируют время регистрации каждым датчиком сейсмической волны, возникающей в процессе проникания объекта в грунт, измеряют расстояния от каждого датчика до точки падения объекта, определяют скорость распространения сейсмической волны в грунте вблизи места падения объекта, затем с учетом угла подхода объекта к поверхности земли и углов между проекцией траектории движения объекта на поверхность земли и направлениями от точки падения объекта до каждого датчика определяют с помощью аналитических вычислений или графическим построением глубину его проникания в грунт.
| ЗОНД ДЛЯ ИССЛЕДОВАНИЯ СВОЙСТВ ГРУНТА | 1996 |
|
RU2111476C1 |
| УСТРОЙСТВО И СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ПРОНИКАНИЯ МЕТАЕМОГО ТЕЛА В ПРЕГРАДУ | 2004 |
|
RU2263297C1 |
| СПОСОБ ОЦЕНКИ СОПРОТИВЛЕНИЯ МАТЕРИАЛОВ ДЕФОРМАЦИИ ПРИ УДАРНОМ НАГРУЖЕНИИ | 1991 |
|
RU2097736C1 |
| US 4007633 A1, 15.02.1977 | |||
| US 5681982 A1, 28.10.1997 | |||
| US 5504685 A1, 02.04.1996. | |||

