Изобретение относится к области испытательной и измерительной техники и может быть использовано при испытаниях объектов, движущихся со сверхзвуковой скоростью.
Известен мобильный комплекс траекторных измерений ZETLab (www.zetlab.ru / ЗАО «Электронные технологии и метрологические системы». Мобильный комплекс траекторных измерений ZETLab), который представляет собой техническую систему на базе видеорегистраторов и сейсмостанций, предназначенную для проведения измерений при испытаниях высокоскоростных изделий ракетных комплексов.
Мобильный комплекс траекторных измерений позволяет определять координаты места встречи объекта с землей, а также время момента встречи.
При работе комплекса осуществляется способ, заключающийся в оптическом наблюдении за движущимся объектом, регистрации получаемого при этом видеоизображения, регистрации сейсмических волн, возникающих в момент соприкосновения объекта с землей и последовательно воздействующих на все сейсмодатчики, установленные в измерительных точках (ИТ) с известными координатами и определении момента времени и координат места встречи объекта с землей, по результатам обработки зарегистрированной информации.
Несмотря на достоинства способа, он характеризуется низким разрешением по времени, то есть не позволяет определять времена встречи с преградой нескольких ОИ, подходящих к ней с малой разновременностью. Это обусловлено особенностями распространения сейсмических волн в грунтах. Кроме того, применяемость способа может быть ограничена погодными условиями, обеспечивающими оптическую непрозрачность воздушной среды (туман, запыленность атмосферы, осадки и пр.). Этот способ выбран в качестве прототипа.
Заявляемый способ направлен на решение технической задачи определения момента встречи объекта испытания (ОИ), летящего со сверхзвуковой скоростью, с преградой (в частном случае с поверхностью земли) по результатам регистрации возбуждаемой им в воздушной среде баллистической ударной волны (скачка уплотнения) (Фабрикант Н.Я. «Аэродинамика», Издательство «Наука»; 1964 г., Красильников В.А. «Звуковые волны в воздухе, воде и твердых телах», М., 1954 г.).
Техническим результатом осуществления способа является его высокая разрешающая способность, обеспечивающая определение моментов встречи с преградой нескольких ОИ, подходящих к ней с малой разновременностью, вне зависимости от массогабаритных характеристик объектов, а также относительная простота и компактность используемых средств измерений, малые затраты на постановку и проведение измерений.
Технический результат достигается за счет того, что в заявляемом способе определения момента встречи ОИ с преградой, включающем регистрацию по крайней мере в одной измерительной точке с известными координатами сигнала, содержащего информацию о подходе ОИ к преграде, определение времени его регистрации в ИТ (tрег) и расчет момента встречи ОИ с преградой, в отличие от прототипа в качестве сигнала, содержащего информацию о подходе ОИ к преграде, регистрируют баллистическую ударную волну (БУВ), возбуждаемую полетом ОИ со сверхзвуковой скоростью, на основании фактической или априорной информации о величинах углов, образуемых траекторией его движения с осями выбранной прямоугольной системы координат, и координатах точки встречи ОИ с преградой рассчитывают расстояние от ИТ до траектории движения ОИ, с использованием которого и значения угла между образующей конуса возмущения и траекторией движения ОИ, полученного на основании фактической или априорной информации о скорости полета ОИ, рассчитывают расстояние R от поверхности конуса возмущения в момент встречи ОИ с преградой до ИТ, а момент встречи ОИ с преградой определяют по формуле:

где сзв - скорость распространения звука в воздушной среде в момент проведения испытания.
Регистрация БУВ, возбуждаемой полетом ОИ со сверхзвуковой скоростью, позволяет решить техническую задачу даже в условиях плохого прогнозирования места встречи ОИ с преградой, когда реальная точка встречи ОИ с преградой может располагаться от ИТ дальше, чем ожидаемая. Это возможно благодаря относительно большому уровню давления во фронте БУВ и ее слабому затуханию при распространении на большие расстояния от траектории. Наличие у БУВ крутого фронта (длительность единицы микросекунд) позволяет определять время его регистрации в ИТ (tрег) с высокой точностью. Характерная N-образная форма БУВ позволяет легко ее идентифицировать среди прочих сигналов. В конечном итоге эти преимущественные особенности БУВ в отличие от сейсмических волн позволяют повысить разрешающую способность способа, что обеспечивает определение моментов встречи с преградой нескольких ОИ, подходящих к ней с малой разновременностью.
Измерительные средства и вспомогательное оборудование для осуществления заявляемого способа компактны и могут быть в короткие сроки развернуты и подготовлены к измерениям, в том числе и на необорудованных специальным образом площадках. Для повышения надежности измерений можно использовать несколько датчиков, но для решения задачи достаточно получить измерения всего одним.
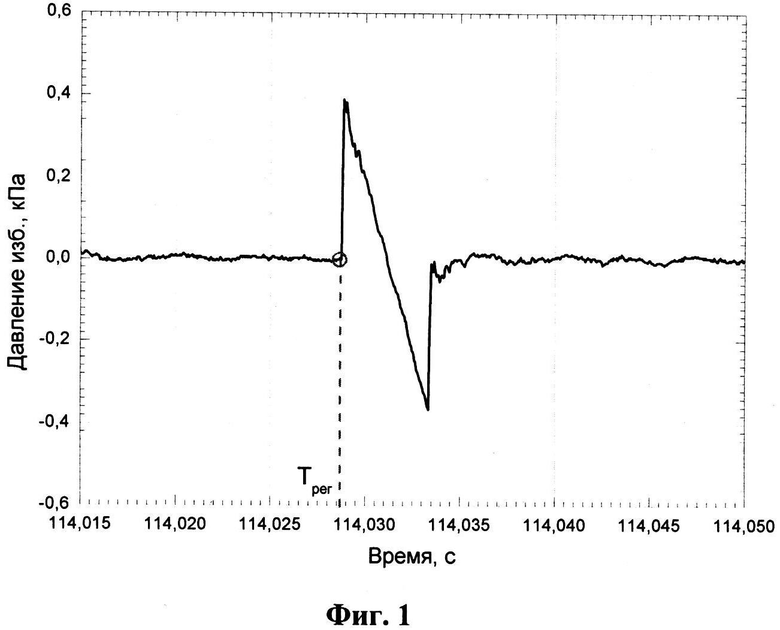
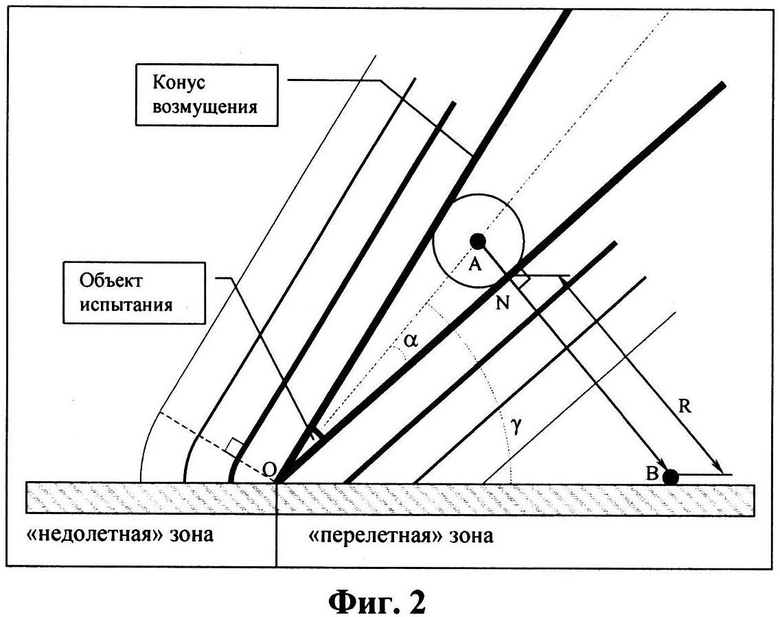
Способ поясняется чертежами. На фигуре 1 приведен результат регистрации баллистической ударной волны в ИТ датчиком давления, на фигуре 2 - схема распространения конуса возмущения после встречи ОИ с преградой, на фигуре 3 - схема, поясняющая алгоритм расчета момента встречи ОИ с преградой.
Способ определения момента встречи ОИ с преградой реализуется следующим образом.
По крайней мере в одной измерительной точке, размещаемой в районе подхода ОИ к преграде, устанавливают датчик избыточного давления, регистрирующий возмущения воздушной среды. Точку установки датчика выбирают таким образом, чтобы он оказался в «перелетной» зоне относительно прогнозируемой точки встречи ОИ с преградой (фиг.2). Перед проведением испытаний выполняют геодезическую привязку датчика к системе пространственных координат измерительной площадки (полигона). Датчик давления подключают к автономному устройству регистрации информации или через адаптер сбора данных к ПЭВМ. Метеостанцией измеряют параметры невозмущенной воздушной среды (не показано).
В ходе проведения испытания регистрируют баллистическую ударную волну, возбуждаемую полетом ОИ со сверхзвуковой скоростью. Регистрируемый сигнал представлен на фиг.1.
В момент встречи ОИ с преградой (фиг.2) огибающая баллистических ударных волн, возбужденных ОИ на траектории, имеет форму конуса, называемую конусом возмущения. Его осью является траектория движения ОИ. Угол α между образующей конуса и его осью связан с числом Маха М соотношением: sin α=1/M (Фабрикант Н.Я. «Аэродинамика», Издательство «Наука»; 1964 г.) После встречи ОИ с преградой образующая конуса возмущения продолжает распространяться в пространстве со скоростью звука по нормали к своей поверхности, достигая датчика давления, расположенного в точке В.
По результатам регистрации баллистической ударной волны определяют момент времени tрег, соответствующий достижению БУВ измерительной точки В (фиг.1).
Точкой возбуждения волны, достигшей измерительной точки В, является точка А, принадлежащая траектории движения ОИ, а в момент встречи ОИ с преградой фронт БУВ, распространяющийся в направлении точки В, находится в точке N.
Траекторию движения ОИ в пространстве на конечном участке его полета (фиг.3) можно описать уравнением (2) с использованием следующих параметров: |Vou| - величина скорости движения ОИ; βx, βy, βz - углы между положительными направлениями осей выбранной прямоугольной системы координат и траекторией движения ОИ, рассчитываемые с использованием значений азимута и угла подхода ОИ к поверхности преграды; Xo, Yo, Zo - координаты точки О встречи ОИ с преградой
В ходе расчетов предполагается, что скорость движения ОИ на конечном участке траектории является постоянной.
Координаты точки встречи ОИ с преградой (Xo, Yo, Zo) определяют путем координирования воронки, образованной при встрече ОИ с преградой. Остальные параметры движения ОИ (|Vou|, βx, βy, βz) могут быть получены как расчетным путем с использованием математической модели движения объекта по траектории, так и экспериментально, путем измерения необходимых параметров непосредственно в ходе испытания.
Используя уравнение прямой (2) и уравнение перпендикуляра, опущенного на нее из точки В (фиг.3), составляют систему уравнений (3). Путем решения системы (3) с использованием набора известных параметров Xo, Yo, Zo, βx, βy, βz, |Vou| находят координаты основания перпендикуляра P(XP, YP, ZP):

Затем находят длину отрезка NB (dNB=R), величина которой необходима для определения времени встречи изделия с преградой.
Расстояние R - это расстояние, преодолеваемое БУВ с момента встречи ОИ с преградой до момента ее появления в ИТ (фиг.2). Полагая скорость распространения БУВ равной скорости звука (Красильников В.А. «Звуковые волны в воздухе, воде и твердых телах», М., 1954 г.), определяют время, за которое БУВ преодолевает расстояние R, то есть время распространения БУВ с момента встречи ОИ с преградой до момента ее регистрации в ИТ (tраспр):

С использованием формулы (1) определяют момент времени встречи ОИ с преградой.
Для отработки и применения предлагаемого способа использовались общеизвестные технические средства:
1. Датчики измерения импульсных давлений воздушной среды (например, содержащиеся в Государственном реестре средств измерений, датчики АДИД.406233.001).
2. Адаптер сбора аналоговых данных (ADLINK Technology Inc., 64-канальный адаптер аналогового ввода-вывода DAQ-2204).
3. Экранированные измерительные линии, соединяющие датчики и схему запуска с регистратором (кабель ГПЭУ 6/012).
4. Электронный тахеометр для геодезической привязки ИТ к выбранной системе координат (TRIMBLE М3).
5. Автоматическая метеорологическая станция АМС-2000.
Работоспособность способа и его возможности подтверждены в ряде экспериментов. При этом результаты, полученные с использованием данного способа, согласуются с данными, полученными другими измерительными средствами.
Решение задачи определения момента встречи ОИ с преградой при его полете со сверхзвуковой скоростью производилось следующим образом.
Согласно заявляемому способу на измерительной площадке в одной ИТ был размещен датчик избыточного давления воздушной среды и выполнена его геодезическая привязка к системе пространственных координат измерительной площадки (XB=-100 м, YB=0 м, ZB=-60 м). Датчик был подключен к адаптеру сбора аналоговых данных DAQ-2204, входящему в состав регистрирующей ПЭВМ. Метеостанцией были измерены параметры воздушной среды (температура воздуха Тв=13°C).
В ходе проведения испытания датчиком была зарегистрирована БУВ, порожденная полетом ОИ со сверхзвуковой скоростью, и определен момент времени tрег=113.9399 с, соответствующий достижению баллистической ударной волной ИТ.
После проведения эксперимента было выполнено координирование воронки, образованной при падении объекта (Xo=340.27 м, Yo=0 м, Zo=-166.08 м).
Используя координаты точки встречи ОИ с преградой и расчетные параметры его движения при подходе к поверхности преграды (βx=135°, βy=45°, βz=90° |Vou|=1200 м/с), путем решения системы уравнений (3) были найдены координаты основания перпендикуляра (XP,YP,ZP), опущенного из ИТ на траекторию движения ОИ. При дальнейших расчетах было найдено расстояние R=144.01 м. С использованием времени регистрации возмущения в ИТ (tрег), скорости звука сзв=339.65 м/с для соответствующих метеоусловий (Тв) и расстояния R по формуле (1) был определен момент встречи ОИ с преградой (t=113.5159 с). Рассчитанное значение времени встречи ОИ с преградой хорошо согласуется с временем срабатывания контактного датчика, установленного на преграде (113.5169 с).
При практическом применении способа подтверждены надежность регистрации БУВ и технический результат, заключающийся в надежном определении момента встречи ОИ с преградой, возможности его применения на необорудованных площадках, при его относительной простоте и малых затратах на применение. В ряде экспериментов применение этого способа обеспечило определение момента встречи с преградой каждого из группы ОИ, подходящих к ней с малой разновременностью.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ТРАЕКТОРИИ И СКОРОСТИ ОБЪЕКТА | 2009 |
|
RU2416103C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК ФУГАСНОСТИ (ВАРИАНТЫ) | 2012 |
|
RU2522740C2 |
| Способ поражения воздушной цели боеприпасом с неконтактным датчиком цели | 2018 |
|
RU2688712C1 |
| СПОСОБ НАВЕДЕНИЯ ПРОТИВОРАКЕТЫ НА СВЕРХЗВУКОВУЮ ЦЕЛЬ | 2022 |
|
RU2825905C2 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ВНЕШНЕБАЛЛИСТИЧЕСКИХ ПАРАМЕТРОВ НА ОСНОВЕ АКУСТИЧЕСКИХ ДАТЧИКОВ | 2008 |
|
RU2392577C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОЛОЖЕНИЯ В ПРОСТРАНСТВЕ И ВО ВРЕМЕНИ ПУЛЬ И СНАРЯДОВ | 2011 |
|
RU2470252C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА ПО СИГНАЛУ РАДИОНАВИГАЦИОННОГО ОРИЕНТИРА | 2008 |
|
RU2367909C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТА | 2008 |
|
RU2377594C1 |
| ИНТЕРФЕРЕНЦИОННЫЙ СПОСОБ ИЗМЕРЕНИЙ ОТНОСИТЕЛЬНЫХ ПЕРЕМЕЩЕНИЙ ДИФФУЗНО ОТРАЖАЮЩИХ ОБЪЕКТОВ | 1998 |
|
RU2154256C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОСТУПАТЕЛЬНОГО ПЕРЕМЕЩЕНИЯ ВЕРТОЛЕТА НА ПОСАДКЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2334945C1 |
Изобретение относится к области испытательной и измерительной техники. Достигаемый технический результат - высокая разрешающая способность, обеспечивающая определение моментов встречи с преградой нескольких объектов испытания, а также простота и компактность используемых средств. Указанный результат достигается за счет того, что способ включает регистрацию в измерительной точке (ИТ) с известными координатами сигнала, содержащего информацию о подходе ОИ к преграде, определение времени его регистрации в ИТ (tрег) и расчет момента встречи ОИ с преградой. В качестве сигнала, содержащего информацию о подходе ОИ к преграде, регистрируют баллистическую ударную волну, возбуждаемую полетом ОИ со сверхзвуковой скоростью. На основании фактической или априорной информации о величинах углов, образуемых траекторией его движения с осями выбранной прямоугольной системы координат, и координатах точки встречи ОИ с преградой рассчитывают расстояние от ИТ до траектории движения ОИ, с использованием которого и значения угла между образующей конуса возмущения и траекторией движения ОИ, полученного на основании фактической или априорной информации о скорости полета ОИ, рассчитывают расстояние R от поверхности конуса возмущения в момент встречи ОИ с преградой до ИТ. Момент встречи ОИ с преградой определяют по формуле  , где сзв - скорость распространения звука в воздушной среде, соответствующая метеоусловиям в момент проведения испытания. 3 ил.
, где сзв - скорость распространения звука в воздушной среде, соответствующая метеоусловиям в момент проведения испытания. 3 ил.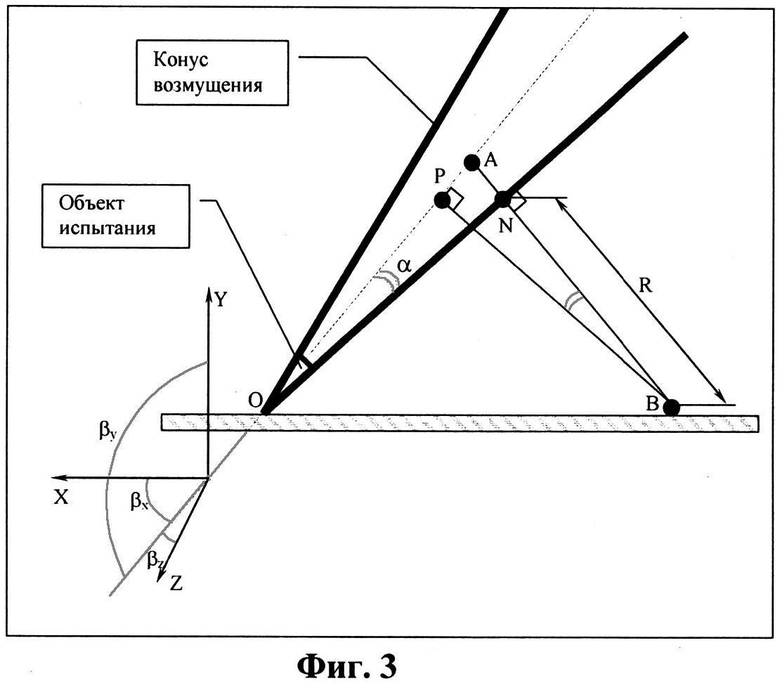
Способ определения момента встречи объекта испытания (ОИ) с преградой, включающий регистрацию по крайней мере в одной измерительной точке (ИТ) с известными координатами сигнала, содержащего информацию о подходе ОИ к преграде, определение времени его регистрации в ИТ (tрег) и последующий расчет момента встречи ОИ с преградой, отличающийся тем, что в качестве сигнала, содержащего информацию о подходе ОИ к преграде, регистрируют баллистическую ударную волну, возбуждаемую полетом ОИ со сверхзвуковой скоростью, на основании фактической или априорной информации о величинах углов, образуемых траекторией его движения с осями выбранной прямоугольной системы координат, и координатах точки встречи ОИ с преградой рассчитывают расстояние от ИТ до траектории движения ОИ, с использованием которого и значения угла между образующей конуса возмущения и траекторией движения ОИ, полученного на основании фактической или априорной информации о скорости полета ОИ, рассчитывают расстояние R от поверхности конуса возмущения в момент встречи ОИ с преградой до ИТ, момент встречи ОИ с преградой определяют по формуле , где сзв - скорость распространения звука в воздушной среде в момент проведения испытания.
| ФАБРИКАНТ Н.Я | |||
| Аэродинамика | |||
| Москва, изд | |||
| "Наука", 1964 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ТРАЕКТОРИИ И СКОРОСТИ ОБЪЕКТА | 2009 |
|
RU2416103C2 |
| Способ отделения угля от пустой породы | 1923 |
|
SU1739A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОМАХА СНАРЯДА В ЗАЩИЩАЕМЫЙ ОБЪЕКТ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2479820C1 |
| СТЕНД ДЛЯ ДИНАМИЧЕСКИХ ИСПЫТАНИЙ | 2001 |
|
RU2239168C2 |
| US 5920522 A, 06.07.1999 | |||
| US 6178141 B1, 23.01.2001 | |||
| WO 2009048500 A2, 16.04.2009 | |||

