Область техники, к которой относится изобретение
Настоящее изобретение относится к электродвигателю для привода механизма стеклоочистителя, включающему в себя узел, имеющий ведущий вал, и редуктор с механизмом уменьшения частоты вращения ведущего вала.
Уровень техники
Обычно электродвигатель, имеющий механизм уменьшения частоты вращения (далее именуемый просто как электродвигатель с механизмом уменьшения частоты вращения), используется в качестве привода стеклоочистителя и т.п., устанавливаемого на транспортное средство. Электродвигатель с механизмом уменьшения частоты вращения спроектирован в виде малогабаритного привода большой мощности, принимая во внимание удобство его установки на транспортное средство. Электродвигатель с механизмом уменьшения частоты вращения включает в себя собственно электродвигатель, имеющий ведущий вал, и редуктор с механизмом уменьшения частоты вращения (например, червяк и червячное колесо) и спроектирован таким образом, чтобы его крутящий момент увеличивался механизмом уменьшения частоты вращения за счет уменьшения частоты вращения ведущего вала и чтобы вращательное усилие передавалось наружу от выходного вала, предусмотренного в механизме уменьшения частоты вращения.
В качестве электродвигателя с механизмом уменьшения частоты вращения, который используется как источник привода устройства стеклоочистителя, известен электродвигатель, имеющий плату управления для управления направлением вращения и частотой вращения ведущего вала. Как описано выше, известен электродвигатель с механизмом уменьшения частоты вращения, имеющий плату управления, например электродвигатель с механизмом уменьшения частоты вращения, описанный японской патентной заявке №2010-093977 (Фиг.3).
Электродвигатель с механизмом уменьшения частоты вращения, описанный в данном патентном документе, включает в себя электродвигателя, имеющий ведущий вал, и редуктор, выполненный в виде червячной передачи. Редуктор включает в себя корпус, имеющий основание и крышку, при этом механизм уменьшения частоты вращения установлен с возможностью вращения в корпусе редуктора. Монтажная плата (плата управления), имеющая множество элементов схемы (магнитный датчик и т.п.), расположена в корпусе редуктора и установлена таким образом, что она закрывает механизм уменьшения частоты вращения в осевом направлении выходного вала.
Расположенный снаружи контур управления выполнен таким образом, чтобы он распознавал вращательное состояние ведущего вала и т.п. на основе сигнала обнаружения от магнитного датчика и т.п. и управлял направлением вращения (положительного вращения или отрицательного вращения) и частотой вращения ведущего вала.
Сущность изобретения
Однако согласно описанию электродвигателя с механизмом уменьшения частоты вращения, приведенному в указанном выше патентном документе, монтажная плата, имеющая множество элементов схемы, расположена вблизи механизма уменьшения частоты вращения, чтобы она закрывала механизм уменьшения частоты вращения. Следовательно, при использовании этого электродвигателя возникает проблема, состоящая в том, что пыль, образующаяся в результате трения на участке зацепления между червяком и червячным колесом, которые образуют механизм уменьшения частоты вращения, и смазка и подобные вещества, наносимые на участок зацепления, легко пристают к монтажной плате в результате вращательного движения электродвигателя с механизмом уменьшения частоты вращения.
Когда посторонние вещества, например образующаяся в результате трения пыль и смазка, пристают к монтажной плате, они действуют как теплоизолирующий материал и уменьшают рассеивание тепла от монтажной платы и в итоге вызывают возникновение неисправности каждого элемента схемы и снижение точности определения положения магнитным датчиком и т.п. Следовательно, на раннем этапе сложно выполнять управление ведущими валом с высокой точностью и необходимо часто проводить техническое обслуживание и ремонт.
Задача настоящего изобретения состоит в том, чтобы защитить монтажную плату от воздействия посторонних веществ, таких как образующаяся в результате трения пыль, смазка и т.п., и предложить электродвигатель стеклоочистителя, способный управлять ведущим валом с высокой точностью в течение длительного периода времени.
Электродвигатель стеклоочистителя по настоящему изобретению включает в себя узел электродвигателя, имеющий ведущий вал, и редуктор для уменьшения частоты вращения ведущего вала; электродвигатель стеклоочистителя содержит: первую шестерню уменьшения частоты вращения, установленную с одного конца ведущего вала и образующую механизм уменьшения частоты вращения; вторую шестерню уменьшения частоты вращения, находящуюся в зацеплении с первой шестерней уменьшения частоты вращения и имеющую соосный с ней выходной вал; магнит датчика, закрепленный на другом конце ведущего вала; плату управления, обращенную к другому концу ведущего вала в его осевом направлении; датчик вращения, установленный на участке, обращенном к магниту датчика платы управления и определяющий вращение ведущего вала; и обмотку, имеющую один конец, электрически соединенный с платой управления и генерирующий электромагнитную силу для вращения ведущего вала посредством подачи тока возбуждения от платы управления.
В электродвигателе стеклоочистителя по настоящему изобретению магнит установлен на ведущем валу, и обмотка расположена на внутренней стороне статора, и ведущий вал установлен с возможностью вращения внутри статора без контакта между магнитом и обмоткой.
В электродвигателе стеклоочистителя по настоящему изобретению плата управления расположена в корпусе платы, имеющем соединительный участок, к которому подсоединен наружный соединитель, а корпус платы установлен на концевом участке корпуса электродвигателя, который образует узел электродвигателя.
В электродвигателе стеклоочистителя по настоящему изобретению датчик вращения представляет собой MR-датчик, имеющий величину сопротивления, которая изменяется в зависимости от изменения магнитного поля в результате вращения магнита датчика.
Согласно выполнению электродвигателя стеклоочистителя по настоящему изобретению первая шестерня уменьшения частоты вращения, образующая механизм уменьшения частоты вращения, установлена на одном конце ведущего вала, магнит датчика крепится к другому концу ведущего вала, плата управления установлена таким образом, что она обращена к другому концу ведущего вала в осевом направлении ведущего вала, датчик вращения для определения вращательного состояния ведущего вала расположен на участке платы управления, обращенном к магниту датчика, и один конец катушки, предназначенный для генерирования электромагнитной силы для вращения ведущего вала на основе подачи тока возбуждения от платы управления, электрически соединен с платой управления. Таким образом, механизм уменьшения частоты вращения и плата управления могут быть соответственно расположены на первом конце и другом конце ведущего вала, так чтобы они находились на расстоянии друг от друга и чтобы посторонние вещества, такие как образующаяся в результате трения пыль, смазка и т.п., не могли попасть в плату управления. Таким образом, имеется возможность уменьшить нарушения работоспособности каждого элемента схемы и снижение точности определения положения магнитным датчиком и т.п. за счет улучшения рассеивания тепла платы управления, и имеется возможность уменьшить объем технического обслуживания и ремонта по сравнению с обычными механизмами и выполнять управление ведущим валом с высокой точностью в течение длительного периода времени.
Согласно выполнению электродвигателя стеклоочистителя по настоящему изобретению, поскольку магнит установлен на ведущем валу, обмотка намотана на внутренней стороне статора, ведущий вал установлен с возможностью вращения с внутренней стороны статора, и при этом поддерживается состояние, когда магнит не вступает в контакт с каждой из обмоток, электродвигатель стеклоочистителя может быть образован как бесщеточный электродвигатель. Соответственно, поскольку пыль не образуется из-за трения щеток, имеется возможность дополнительно препятствовать попаданию посторонних веществ в плату управления.
Согласно выполнению электродвигателя стеклоочистителя по настоящему изобретению, поскольку плата управления расположена в корпусе платы, имеющем соединительный участок, который должен соединяться с наружным соединителем, и корпус платы установлен на концевом участке корпуса электродвигателя, который образует узел электродвигателя, имеется возможность заблаговременно размещать плату управления в корпусе платы. Следовательно, множество плат управления, отличающихся друг от друга по техническим характеристикам, размещается в общем корпусе платы, и любая из этих плат управления выбирается согласно необходимым техническим характеристикам, и тем самым можно легко собрать электродвигатель стеклоочистителя с различными техническими характеристиками.
Согласно выполнению электродвигателя стеклоочистителя по настоящему изобретению, поскольку датчик вращения является MR-датчиком, имеющим величину сопротивления, которая изменяется в зависимости от изменения магнитного поля из-за вращения магнита датчика, имеется возможность предложить электродвигатель стеклоочистителя без подвижных узлов, таких как переключающие компоненты и т.п. Следовательно, имеется возможность повысить надежность электродвигателя стеклоочистителя и выполнять управление ведущим валом с высокой точностью в течение длительного периода времени.
Краткое описание чертежей
Фиг.1 - вид на устройство стеклоочистителя, имеющее электродвигатель стеклоочистителя по настоящему изобретению;
Фиг.2 - увеличенный перспективный вид электродвигателя стеклоочистителя показанного на Фиг.1;
Фиг.3 - вид в разрезе электродвигателя стеклоочистителя, показанного на Фиг.2 вдоль ведущего вала и выходного вала;
Фиг.4 - перспективное изображение в разобранном виде, на котором показана внутренняя конструкция узла электродвигателя, показанного на Фиг.3;
Фиг.5 - перспективный вид снизу на корпус электродвигателя из Фиг.3;
Фиг.6 - перспективный вид корпуса платы из Фиг.3, если смотреть на него со стороны его открытого участка; и
Фиг.7 - вид в разрезе электродвигателя по второму варианту выполнения, соответствующий виду в разрезе на Фиг.3.
Подробное описание предпочтительных вариантов выполнения
Ниже будет приведено подробное описание электродвигателя стеклоочистителя по первому варианту выполнения настоящего изобретения со ссылкой на чертежи.
Фиг.1 - вид устройства стеклоочистителя с электродвигателем стеклоочистителя по настоящему изобретению. Фиг.2 - увеличенный перспективный вид электродвигателя стеклоочистителя, показанного на Фиг.1, Фиг.3 - вид в разрезе электродвигателя стеклоочистителя, показанного на Фиг.2, вдоль ведущего вала и выходного вала, Фиг.4 - перспективное изображение в разобранном виде, на котором показана внутренняя конструкция узла электродвигателя, показанного на Фиг.3, Фиг.5 - перспективный вид снизу на корпус электродвигателя из Фиг.3, и Фиг.6 - перспективный вид корпуса платы из Фиг.3, если смотреть на него со стороны его открытого участка.
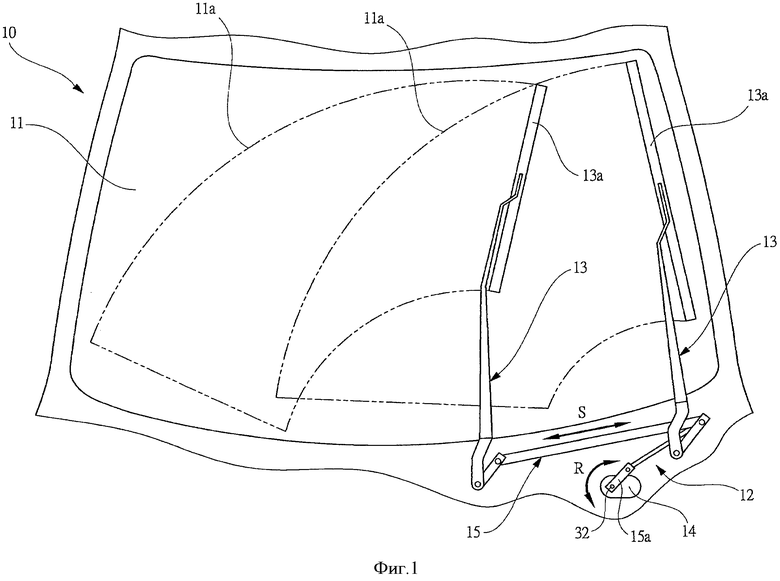
Как показано на Фиг.1, с передней стороны транспортного средства 10, например автомобиля, установлено ветровое стекло 11, представляющее собой защитное стекло, и на переднем концевом участке ветрового стекла 11 транспортного средства 10 установлено устройство 12 стеклоочистителя для удаления дождевой воды, пыли и т.п. с ветрового стекла 11. Устройство 12 стеклоочистителя включает в себя пару рычагов 13 стеклоочистителя, расположенных на стороне сиденья водителя и на стороне переднего пассажирского сиденья, и электродвигатель 14 стеклоочистителя. Электродвигатель 14 стеклоочистителя соединен со стороной основания каждого рычага 13 стеклоочистителя через многозвенный механизм 15 и предназначен для приведения в движение каждой щетки 13а стеклоочистителя, установленной на стороне вершины каждого рычага 13 стеклоочистителя на ветровом стекле 11.
Электродвигатель 14 стеклоочистителя является электродвигателем очистителя, имеющим знакопеременное вращение (реверсивным электродвигателем стеклоочистителя), который поочередно выполняет реверсирование вращения на основе заданной логики управления. Следовательно, многозвенный механизм 15 выполняет качания в направлении показанной на чертеже стрелки S посредством повторяющихся реверсируемых вращений электродвигателя 14 стеклоочистителя, как показано стрелкой R на чертеже. Каждая щетка 13а стеклоочистителя выполняет возвратно-вращательное движение в каждой области 11а, как показано на Фиг.1. Таким образом, имеется возможность удалять с ветрового стекла 11 дождевую воду, пыль и прочие загрязнения.
Как показано на Фиг.2-6, электродвигатель 14 стеклоочистителя является электродвигателем с механизмом уменьшения частоты вращения, который имеет механизм DS1 и включает в себя узел 20 электродвигателя, редуктор 30 и блок 40 контроллера. Узел 20 электродвигателя и редуктор 30 соединены друг с другом множеством крепежных винтов SC через соединительный элемент 50, и узел 20 электродвигателя и блок 40 контроллера соединены друг с другом с помощью соединительного устройства CS.
Узел 20 электродвигателя включает в себя корпус 21, который имеет цилиндрическую форму с дном и выполнен из стального листа глубокой вытяжкой (штамповкой) и т.п. Нижний участок 21а корпуса 21 электродвигателя имеет сквозное отверстие 21b, через которое проходит другой конец ведущего вала 22 (правая сторона Фиг.3). На внутренней стороне корпуса 21 электродвигателя вблизи сквозного отверстия 21b выполнен участок 21с для подшипника, который является неотъемлемой частью корпуса электродвигателя. Участок 21с для подшипника удерживает первый радиальный подшипник 23 для плавного вращения ведущего вала 22.
Как показано на Фиг.5, на наружной периферийной стороне корпуса 21 электродвигателя предусмотрено множество зацепляющихся вогнутых участков 21d, расположенных в направлении вдоль окружности корпуса 21 электродвигателя. На периферии корпуса 21 электродвигателя предусмотрено всего четыре зацепляющихся вогнутых участка 21d (на Фиг.5 видны только два из них), которые расположены с равными интервалами (с интервалами 90 градусов) и углублены в направлении внутреннего участка корпуса электродвигателя от наружной стороны в радиальном направлении корпуса 21 электродвигателя. Зацепляющиеся вогнутые участки 21d входят в зацепление с соответствующими зацепляющимися выступающими участками 41 а (см. Фиг.6), которые являются неотъемлемой частью корпуса 41 платы и согласуются с соответствующими зацепляющимися вогнутыми участкам 21d. В этом случае каждый зацепляющийся вогнутый участок 21d и каждый зацепляющийся выступающий участок 41а образуют соединительное устройство CS, тем самым обеспечивая жесткое крепление корпуса 41 платы к корпусу 21 электродвигателя за счет одного перемещения, посредством которого зацепляющиеся вогнутые участки 21d входят в зацепление с соответствующими зацепляющимися выступающими участками 41а. На открытой стороне (левая сторона на Фиг.3) корпуса 21 электродвигателя предусмотрен направленный радиально наружу выступающий кольцевой фланцевый участок 21е, который является неотъемлемой частью корпуса электродвигателя. Поскольку фланцевый участок 21е опирается на первый фланцевый участок 50а, предусмотренный на соединительном элементе 50, имеется возможность соединения обоих фланцевых участков друг с другом без отклонения за счет их крепления крепежными винтами SC с заданным моментом затяжки.
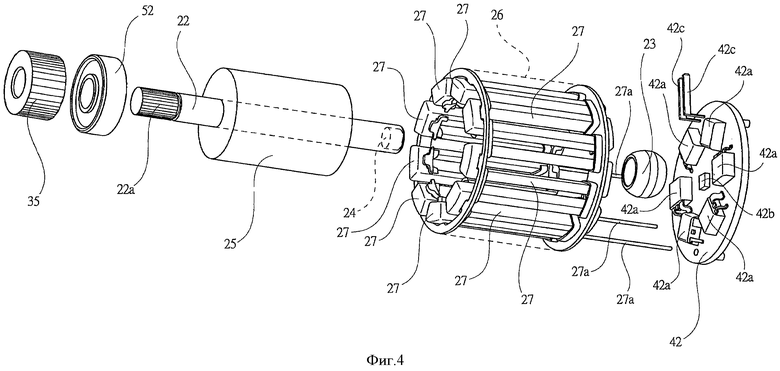
Первый конец (левая сторона на Фиг.3) ведущего вала 22 имеет зубчатый участок 22а, который является неотъемлемой частью ведущего вала и содержит впадины и выступы, продолжающиеся в осевом направлении. Первая шестерня 35 уменьшения частоты вращения, которая образует механизм DS1 уменьшения частоты вращения, крепится к зубчатому участку 22а, так чтобы первая шестерня 35 уменьшения частоты вращения и ведущий вал 22 были жестко соединены друг с другом и чтобы имелась возможность предотвратить вращение вхолостую первой шестерни 35 уменьшения частоты вращения.
Первый конец ведущего вала 22 поддерживается с возможностью вращения вторым радиальным подшипником 52, установленным в соединительном элементе 50, и выступает в редуктор 30 через второй радиальный подшипник 52.
Другой конец ведущего вала 22 поддерживается с возможностью вращения первым радиальным подшипником 23 и выступает в блок 40 контроллера через первый радиальный подшипник 23 и сквозное отверстие 21b. В торцевой поверхности другого концевого участка ведущего вала 22 предусмотрен установочный углубленный участок 22b, который углублен в осевом направлении ведущего вала 22. Магнит 24 датчика, выполненный в форме диска, крепится в установочном углубленном участке 22b и намагничен таким образом, что он имеет множество полярностей, при этом полюсы N и S попеременно расположены в направлении по окружности, и магнит поворачивается вместе с ведущим валом 22.
Магнит 25, имеющий цилиндрическую форму, крепится к центральному наружному периферийному участку ведущего вала 22 в осевом направлении и продолжается в осевом направлении ведущего вала 22. Магнит 25 вращается электромагнитной силой обмоток 27, установленных с наружной периферийной стороны магнита 25, который также намагничен таким образом, что полюсы N и S попеременно расположены в направлении по окружности и магнит поворачивается вместе с ведущим валом 22.
Статор 26, имеющий цилиндрическую форму, крепится на внутренней стороне основания 21 электродвигателя по прессовой посадке. Множество зубьев (не показано), которые радиально продолжаются к центральном участку статора 26, расположено в радиальном направлении на внутренней стороне статора 26 и является неотъемлемой частью статора, и обмотки 27 намотаны вокруг соответствующих зубьев с помощью сосредоточенной обмотки.
Магнит 25 расположен на внутренней стороне обмоток 27 с заданным зазором (воздушным зазором), так чтобы ведущий вал 22 мог вращаться на внутренней стороне статора 26 в бесконтактном состоянии, когда магнит 25 не контактирует с каждой из обмоток 27. В этом случае ведущий вал 22, магнит 25, статор 26 и обмотки 27 образуют бесщеточный электродвигатель. Каждая обмотка имеет фазы U, V и W, и три концевых участка 27а обмотки, предусмотренных с одного конца каждой обмотки 27, имеют электрическое соединение с платой 42 управления, которая расположена в корпусе 41 платы, при этом концевые участки обмотки проходят через нижний участок 21а корпуса 21 электродвигателя, как показано на Фиг.5.
На каждую из обмоток 27 с фазами U, V и W в заданное время подается ток возбуждения от платы 42 управления, так чтобы вокруг нее генерировалась электромагнитная сила. Вращательное усилие генерируется в магните 25 посредством генерирования электромагнитной силы, в результате чего выполняется вращение ведущего вала 22 с заданным крутящим моментом, числом оборотов и направлением вращения. В частности, за счет переключения направления тока возбуждения, подаваемого на обмотки 27 с одной стороны (в следующем порядке: фаза U, фаза V и фаза W), на другую сторону (в следующем порядке: фаза W, фаза V и фаза U) вращение ведущего вала изменяется с положительного вращения на отрицательное вращение.
Редуктор 30 включает в себя корпус 31 редуктора, который, к примеру, отлит из расплавленного алюминия и имеет цилиндрическую форму с дном. Открытая сторона (правая сторона на Фиг.3) корпуса 31 редуктора обращена к открытой стороне корпуса 21 электродвигателя и имеет радиально выступающий наружу фланцевый участок 31а, который является неотъемлемой частью корпуса редуктора. Поскольку фланцевый участок 31а опирается на второй фланцевый участок 51а, предусмотренный на соответствующем элементе 50, имеется возможность соединить фланцевые участки друг с другом без отклонения за счет их крепления крепежными винтами SC с заданным моментом затяжки.
Нижний участок 31b корпуса 31 редуктора снабжен опорным цилиндром 31с, который образован приблизительно в цилиндрической форме и является неотъемлемой частью нижнего участка. Выходной вал 32 расположен параллельно ведущему валу 22 и проходит через опорный цилиндр 31с. Третий радиальный подшипник 33 расположен между опорным цилиндром 31 с и выходным валом 32. Третий радиальный подшипник 33 служит для плавного вращения выходного вала 32.
Выходной вал 32 имеет диаметр, превышающий диаметр ведущего вала 22, и выходной вал 32 имеет большую жесткость по сравнению с жесткостью ведущего вала 22. Таким образом, крутящий момент, увеличенный с помощью механизма DS1 уменьшения частоты вращения, может стабильно передаваться наружу.
Первый конец (левая сторона на Фиг.3) выходного вала 32 имеет первый зубчатый участок 32а, включающий в себя впадины и выступы, продолжающиеся в осевом направлении, и участок 32b с наружной резьбой рядом с первым зубчатым участком 32а, при этом указанные участки являются неотъемлемой частью выходного вала. Первый зубчатый участок 32а входит в зацепление с первым концом выходного звена 15а (см. Фиг.1), которое образует многозвенный механизм 15. Кроме того, участок 32b с наружной резьбой крепится с помощью резьбового соединения к крепежной гайке (не показано) для крепления выходного звена 15а к выходному валу 32. Таким образом, выходное звено 15а жестко крепится к выходному валу 32 и не действует вхолостую.
Первый конец выходного вала 32 снабжен стопорным кольцом 34, и это стопорное кольцо 34 предотвращает люфт выходного вала 32 относительно опорного цилиндра 31с в осевом направлении. Таким образом, имеется возможность предотвратить люфт многозвенного механизма 15 во время вращения электродвигателя 14 стеклоочистителя, и имеется возможность препятствовать возникновению ненормальных шумов в многозвенном механизме 15 и неравномерному износу подвижных участков многозвенного механизма 15, т.е. шарнира (не показано) и т.п.
Другой конец (правая сторона на Фиг.3) выходного вала 32 имеет второй зубчатый участок 32с, который содержит впадины и выступы, продолжающиеся в осевом направлении, при этом второй зубчатый участок является неотъемлемой частью этого конца вала. Вторая шестерня 36 уменьшения частоты вращения, которая образует механизм DS1 уменьшения частоты вращения посредством зацепления с первой шестерней 35 уменьшения частоты вращения, крепится ко второму зубчатому участку 32с. Поскольку второй зубчатый участок 32с крепится к центру вращения второй шестерни 36 уменьшения частоты вращения, имеется возможность препятствовать вращению вхолостую второй шестерни 36 уменьшения частоты вращения. Кроме того, другой конец выходного вала 32 поддерживается с возможностью вращения четвертым радиальным подшипником 53, установленным в соединительном элементе 50.
Механизм DS1 уменьшения частоты вращения ведущего вала 22 передает вращение наружу через выходной вал 32 и расположен с возможностью вращения в корпусе 31 редуктора. Механизм DS1 уменьшения частоты вращения образован первой шестерней 35 уменьшения частоты вращения, которая крепится к зубчатому участку 22а ведущего вала 22, и второй шестерней 36 уменьшения частоты вращения, которая крепится ко второму зубчатому участку 32с выходного вала 32. Первая шестерня 35 уменьшения частоты вращения имеет диметр меньше диаметра второй шестерни 36 уменьшения частоты вращения. Таким образом, ее крутящий момент увеличивается посредством уменьшения частоты вращения ведущего вала 22 за счет заданного передаточного числа редуктора и увеличения крутящего момента, передаваемого наружу от выходного вала 32.
Соединительный элемент, к примеру, отлит из расплавленного алюминия и имеет цилиндрическую форму с дном. Открытая сторона (правая сторона на Фиг.3) соединительного элемента 50 обращена к открытой стороне корпуса 21 электродвигателя, и сторона нижнего участка 51 с дном (левая сторона на Фиг.3) соединительного элемента 50 обращена к открытой стороне корпуса 31 редуктора. Другими словами, соединительный элемент 50 расположен между корпусом 21 электродвигателя и корпусом 31 редуктора.
Открытая сторона соединительного элемента 50 имеет первый фланцевый участок 50а, который является неотъемлемой частью открытой стороны соединительного элемента и опирается на фланцевый участок 21е корпуса 21 электродвигателя, и сторона нижнего участка 51 с дном соединительного элемента 50 имеет второй фланцевый участок 51а, который является неотъемлемой частью нижнего участка с дном и опирается на фланцевый участок 31a корпуса 31 редуктора. Таким образом, соединительный элемент 50 жестко крепится между корпусом 21 электродвигателя и корпусом 31 редуктора крепежными винтами SC.
Нижний участок 51 соединительного элемента 50 имеет первый опорный вогнутый участок 51b, который углублен в направлении корпуса 31 редуктора и является неотъемлемой частью нижнего участка, и второй опорный вогнутый участок 51с, который углублен в направлении корпуса 21 электродвигателя. Второй радиальный подшипник 52, поддерживающий с возможностью поворачивания первый конец ведущего вала 22, крепится в первом опорном вогнутом участке 51b, и четвертый радиальный подшипник 53, поддерживающий с возможностью вращения другой конец выходного вала 32, крепится во втором опорном вогнутом участке 51с. Таким образом, имеется возможность поддерживать состояние зацепления между первой шестерней 35 уменьшения частоты вращения и второй шестерней 36 уменьшения частоты вращения, которые образуют механизм DS1 уменьшения частоты вращения, в то же время обеспечивая плавное вращение ведущего вала 22 и выходного вала 32.
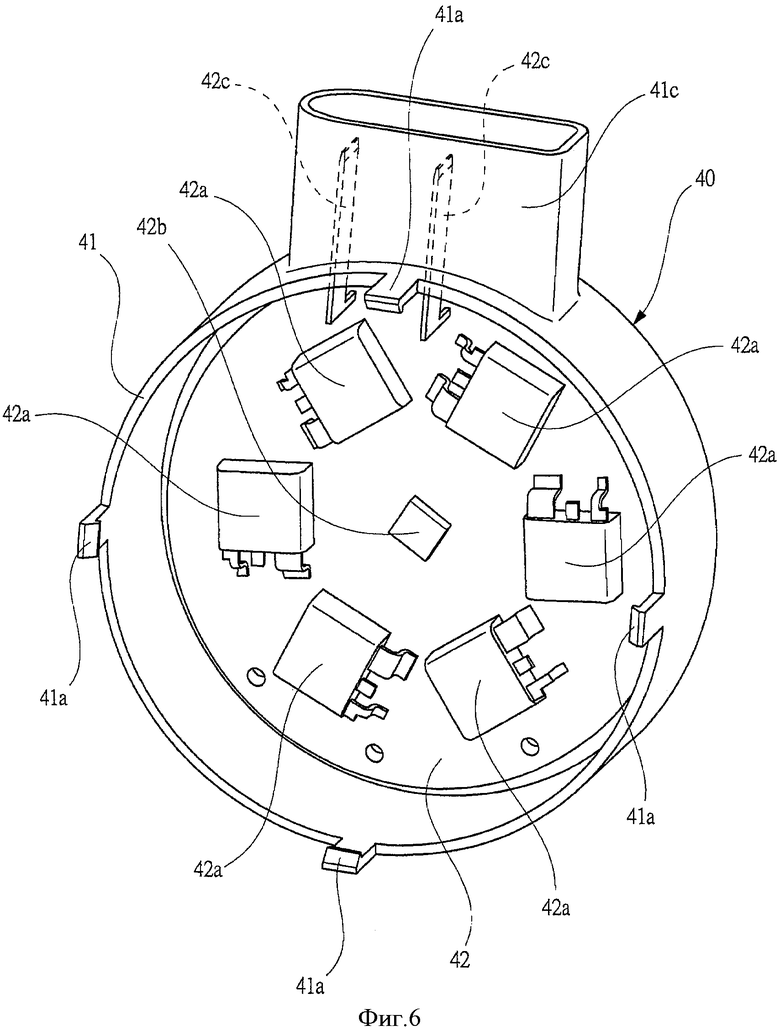
Блок 40 контроллера образован в цилиндрической форме с дном посредством литья под давлением и т.п. из полимерного материала, например из пластика, и включает в себя корпус 41 платы, установленный на концевом участке корпуса 21 электродвигателя.
Открытая сторона (левая сторона на Фиг.3) корпуса 41 платы обращена к нижнему участку 21а корпуса 21 электродвигателя, и открытая сторона корпуса 41 платы, как показано на Фиг.6, снабжена множеством зацепляющихся выступающих участков 41 а. Вершины зацепляющихся выступающих участков 41а продолжаются в направлении корпуса 21 электродвигателя, и вершина зацепляющихся выступающих участков 41 а входят в зацепление с соответствующими зацепляющимися вогнутыми участками 2 Id, предусмотренными на наружной периферийной стороне корпуса 21 электродвигателя. В направлении по окружности корпуса 41 платы предусмотрено всего четыре зацепляющихся выступающих участка 41 а, которые расположены с равными интервалами (с интервалами 90 градусов) и согласуются с соответствующими зацепляющимися вогнутыми участкам 21d.
Плата 42 управления образована из полимерного материала, например из фенольной смолы, приблизительно в форме диска, расположенного в корпусе 41 платы, и крепится на нижнем участке 41b корпуса 41 платы. Плата 42 управления обращена к другому концу ведущего вала 22 в осевом направлении ведущего вала 22 и имеет электрическое соединение с концевыми участками 27а обмотки, предусмотренными с одного конца обмоток 27.
Плата 42 управления имеет шесть задающих контуров (элементов схемы) 42а для подачи тока возбуждения к каждой обмотке 27 и MR-датчик (магнитный датчик) 42b в качестве датчика вращения для определения состояния вращения магнита 24 датчика. Задающие контуры 42а расположены в направлении по окружности платы 42 управления и предназначены для подачи тока возбуждения на обмотки 27 с фазами, расположенными в порядке U, V и W или в обратном порядке, на основе управления контроллера транспортного средства (не показано).
MR-датчик 42b установлен на участке, обращенном к магниту 24 датчика платы 42 управления. MR-датчик 42b имеет величину сопротивления, которая изменяется в зависимости от изменения магнитного поля из-за вращения магнита 24 датчика, и генерирует величину сопротивления в качестве сигнала обнаружения. MR-датчик 42b определяет вращательное состояние (частоту вращения, угловое положение и т.п.) ведущего вала 22 по изменению величины сопротивления и посылает сигнал обнаружения (величина сопротивления) на контроллер транспортного средства.
Плата 42 управления снабжена множеством соединительных клемм 42 с (показаны только две клеммы), каждая из которых изготовлена из металлического материала, например из латуни, который имеет превосходную электропроводность, и образована в форме пластины. Первый конец каждой клеммы 42с имеет электрическое соединение с наружной периферией платы 42 управления, а другой конец каждой клеммы 42с проходит через корпус 41 платы и продолжается в направлении, перпендикулярном осевому направлению ведущего вала 22.
В корпусе 41 платы предусмотрен соединительный участок 41с с полым соединителем, который является неотъемлемой частью корпуса платы и расположен на участке, соответствующем каждой соединительной плате 42с, и другой конец каждой клеммы 42с расположен внутри соединительного участка 41с соединителя. Как показано стрелкой М на Фиг.2, наружный соединитель ОС, предусмотренный в транспортном средстве 10, вставляется в соединительный участок соединителя 41с, тем самым обеспечивая электрическое соединение контроллера транспортного средства с платой 42 управления.
Ниже приводится подробное описание работы электродвигателя 14 стеклоочистителя, выполненного согласно приведенному выше описанию, со ссылкой на чертежи.
При включении переключателя стеклоочистителя (не показан), расположенного внутри транспортного средства, ток возбуждения подается на каждую обмотку 27 от контроллера транспортного средства через каждый задающий контур 42а платы 42 управления. Затем в каждой обмотке генерируется электромагнитная сила, тем самым, соответственно вращающая магнит 25 (ведущий вал 22) относительно статора 26 (каждой обмотки 27). Частота вращения ведущего вала 22 уменьшается с помощью механизма DS1 уменьшения частоты вращения (первой шестерней 35 уменьшения частоты вращения и второй шестерней 36 уменьшения частоты вращения) для создания высокого крутящего момента. Вращающее усилие крутящего момента передается на многозвенный механизм 15 через выходной вал 32, и каждый рычаг 13 стеклоочистителя выполняет периодическое качательное движение. Определение положения изменения направления на обратное и положения останова каждого из рычагов 13 стеклоочистителя выполняется посредством подсчета изменения величины сопротивления на основе обнаружения сигнала MR-датчика 42b.
Заданное количество смазки для обеспечения плавного вращения обеих шестерней наносится на участок зацепления между первой шестерней 35 уменьшения частоты вращения и второй шестерней 36 уменьшения частоты вращения. Кроме того, из-за длительного использования электродвигателя 14 стеклоочистителя в результате трения между первой шестерней 35 уменьшения частоты вращения и второй шестерней 36 уменьшения частоты вращения образуется пыль. Таким образом, даже если образующаяся в результате трения пыль, смазка и т.п. рассеиваются в корпусе 31 редуктора во время 13 работы электродвигателя 14 стеклоочистителя, то поскольку в этом варианте выполнения нижний участок 51 соединительного элемента 50 и нижний участок 21а корпуса 21 электродвигателя расположены между механизмом DS1 уменьшения частоты вращения и платой 42 управления, нижние участки 51 и 21а образуют барьер (перегородку). Следовательно, образующиеся в результате трения пыль, смазка и т.п. не могут попасть в плату 42 управления, и имеется возможность поддерживать в чистоте плату 42 управления.
Как описано выше, в электродвигателе 14 стеклоочистителя по первому варианту выполнения первая шестерня 35 уменьшения частоты вращения, образующая механизм DS1 уменьшения частоты вращения, установлена на первом конце ведущего вала 22, магнит 24 датчика крепится к другому концу ведущего вала 22, плата 42 управления установлена таким образом, что она обращена к другому концу ведущего вала 22 в осевом направлении ведущего вала 22, и MR-датчик 42b для определения вращения ведущего вала 22 расположен на участке платы 42 управления таким образом, что он обращен к магниту 24 датчика, и концевые участки 27а обмоток, генерирующих электромагнитную силу для вращения ведущего вала 22 посредством подачи тока возбуждения от платы 42 управления, имеют электрическое соединение с платой 42 управления.
Таким образом, имеется возможность размещения механизма DS1 уменьшения частоты вращения и платы 42 управления на одном конце и другом конце ведущего вала 22, так чтобы они находились на удалении друг от друга, и посторонние вещества, например образующаяся в результате трения пыль, смазка и т.п., не могли попасть с плату 42 управления. Следовательно, имеется возможность уменьшить нарушения работоспособности каждого задающего контура 42а и снижение точности определения положения MR-42 датчиком 42b за счет препятствования ухудшению рассеивания тепла платы 42 управления, и имеется возможность уменьшить объем технического обслуживания и ремонта с переборкой по сравнению с обычными механизмами и выполнять управление ведущим валом с высокой точностью в течение длительного периода времени.
Кроме того, в электродвигателе 14 стеклоочистителя по первому варианту выполнения, поскольку магнит 25 установлен на ведущем валу 22, и обмотки 27 намотаны на внутренней стороне статора 26, и ведущий вал 22 может вращаться внутри статора 26 в бесконтактном состоянии, где магнит 25 удерживается от вступления в контакт с каждой из обмоток 27, электродвигатель 14 стеклоочистителя может быть образован как бесщеточный электродвигатель. Следовательно, поскольку пыль не образуется из-за трения щеток, имеется возможность дополнительно препятствовать попаданию посторонних веществ в плату 42 управления.
Кроме того, в электродвигателе 14 стеклоочистителя по первому варианту выполнения, поскольку плата 42 управления расположена в корпусе 41 платы, имеющем соединительный участок 41с, который должен соединяться с наружным соединителем ОС, и корпус 41 платы установлен на концевом участке корпуса 21 электродвигателя, который образует узел 20 электродвигателя, имеется возможность заблаговременно разместить плату 42 управления в корпусе 41 платы. Следовательно, имеется возможность легко образовать электродвигатель 14 стеклоочистителя на основе различных характеристик за счет выбора оптимальной платы управления из разных плат 42 управления, заблаговременно устанавливаемых в обычный корпус 41 платы на основе требуемых характеристик.
Кроме того, поскольку датчик вращения является MR-датчиком 42b, имеющим величину сопротивления, которая изменяется в зависимости от изменения магнитного поля из-за вращения магнита 24 датчика, имеется возможность предложить электродвигатель 14 стеклоочистителя по первому варианту выполнения без подвижных узлов, таких как переключающие компоненты и т.п. Следовательно, имеется возможность повысить надежность электродвигателя 14 стеклоочистителя и выполнять управление ведущим валом 22 с высокой точностью в течение длительного периода времени.
Ниже приводится подробное описание электродвигателя стеклоочистителя по второму варианту выполнения настоящего изобретения со ссылкой на чертежи. Кроме того, участки, имеющие такие функции, как и участки, описанные в первом варианте выполнения, обозначены такими же ссылочными номерами, как и участки в первом варианте выполнения, и их подробное описание будет опущено.
На Фиг.7 показан вид в разрезе электродвигателя по второму варианту выполнения, соответствующий виду в разрезе на Фиг.3.
Как показано на Фиг.7, электродвигатель стеклоочистителя 60 по второму варианту выполнения отличается от электродвигателя 14 стеклоочистителя (см. Фиг.3) по первому варианту выполнения тем, что изменена конструкция механизма DS1 уменьшения частоты вращения, изменена форма ведущего вала, изменена форма корпуса 31 редуктора и исключен соединительный элемент 50.
Электродвигатель 60 стеклоочистителя включает в себя узел 70 электродвигателя и редуктор 80, и эти компоненты соединены друг с другом множеством крепежных винтов SC.
Узел 70 электродвигателя включает в себя ведущий вал 71, который превышает по длине ведущий вал 22 (см. Фиг.3) по первому варианту выполнения. Первый конец ведущего вала 71 продолжается до внутренней стороны корпуса 81 редуктора, образующего редуктор 80, и первый конец ведущего вала 71 имеет червяк (первую шестерню уменьшения частоты вращения), который является неотъемлемой частью ведущего вала и образует механизм DS2 уменьшения частоты вращения. Червяк вращается при вращении ведущего вала 71 в корпусе 81 редуктора.
Редуктор 80 включает в себя корпус 81, имеющий приблизительно чашеобразную форму. Червячное колесо (вторая шестерня уменьшения частоты вращения) 82, образующая механизм DS2 уменьшения частоты вращения, входит в зацепление с червяком 72 и размещена с возможностью вращения в корпусе 81 редуктора, при этом основание выходного вала 83 крепится к центру вращения червячного колеса 82.
Вершина выходного вала 83 продолжается наружу через выступ (не показан), который является неотъемлемой частью нижнего участка 81а корпуса 81 редуктора, и вершина выходного вала 83 крепится к первому концу выходного звена 15а, показанного на Фиг.1. Таким образом, частота вращения ведущего вала 71 уменьшается червяком 72 и червячным колесом 82, в результате чего уменьшенная частота вращения передается наружу от выходного вала 83.
Сторона корпуса 81 редуктора со стороны корпуса 21 электродвигателя имеет стенку 84, которая является неотъемлемой частью корпуса редуктора и через которую проходит ведущий вал 71, при этом в стенке 84 установлен второй радиальный подшипник 85 поддержки с возможностью вращения приблизительно центрального участка ведущего вала 71. Кроме того, в корпусе 81 редуктора со стороны, противоположной стороне корпуса 21 электродвигателя, установлен третий радиальный подшипник 86 для поддержки с возможностью вращения первого конца ведущего вала 71.
Таким образом, поскольку во время вращения электродвигателя 60 стеклоочистителя оба конца и приблизительно центральный участок ведущего вала 71 поддерживаются с возможностью вращения первым радиальным подшипником 23, вторым радиальным подшипником 85 и третьим радиальным подшипником 86, имеется возможность обеспечить устойчивое вращение без вибрации. Несмотря на то, что противодействующая сила (стрелка на чертеже) от червячного колеса 82 оказывает действие на ведущий вал 71 (червяк 72), имеется возможность препятствовать люфту ведущего вала 71 в осевом направлении с помощью регулировочного винта 87, установленного в корпусе 81 редуктора. Таким образом, имеется возможность препятствовать возникновению ненормальных шумов во время работы электродвигателя 60 стеклоочистителя.
В электродвигателе 60 стеклоочистителя стенка 84 корпуса 81 редуктора и нижний участок 21а корпуса 21 электродвигателя расположены между механизмом DS2 уменьшения частоты вращения и платой 42 управления, и стенка 84 и нижний участок 21а образуют барьер (перегородку). Следовательно, образующаяся в результате трения пыль, смазка и т.п. не могут попасть в плату 42 управления, и имеется возможность поддерживать в чистоте плату 42 управления.
В электродвигателе 60 стеклоочистителя по второму варианту выполнения, выполненном, как описано выше, имеется возможность достичь такого же эффекта, как и в первом варианте выполнения. Кроме того, в электродвигателе 60 стеклоочистителя по второму варианту выполнения, поскольку электродвигатель стеклоочистителя, имеющий обычный механизм DS2 уменьшения частоты вращения, который содержит червяк 72 и червячное колесо 82, не включает в себя плату управления, которая должна быть расположена корпусе 81 редуктора, имеется возможность уменьшить толщину в осевом направлении выходного вала 83 корпуса 81 редуктора. Следовательно, электродвигатель 60 стеклоочистителя может быть выполнен в виде компактной конструкции, что увеличивает удобство его установки на транспортное средство.
Следует понимать, что настоящее изобретение не ограничивается до каждого из вышеописанных вариантов выполнения и могут быть выполнены различные модификации и изменения без отклонения от объема настоящего изобретения. Например, в каждом из вышеописанных вариантов выполнения несмотря на то, что ведущий вал 22 (ведущий вал 71) снабжен магнитом 25, обмотки 27 расположены внутри статора 26 и бесщеточный электродвигатель показан как источник привода, настоящее изобретение не ограничивается этим и может применяться для щеточного электродвигателя, в котором ведущий вал имеет преобразователь и обмотку и корпус электродвигателя имеет магнит и щетку.
Кроме того, в каждом из вышеописанных вариантов выполнения несмотря на то, что каждый концевой участок 27а обмотки имеет электрическое соединение с платой 42 управления, настоящее изобретение не ограничивается этим и каждый концевой участок 27а обмотки и плата 42 управления могут иметь электрическое соединение друг с другом с помощью соединителя. В этом случае, когда корпус 21 электродвигателя установлен на корпусе 41 платы, каждый концевой участок 27а и плата 42 управления могут быть электрически соединены друг с другом посредством одного перемещения, и имеется возможность упростить процесс сборки этого электродвигателя.
Кроме того, в каждом из вышеописанных вариантов выполнения несмотря на то, что каждый из электродвигателей 14 и 60 стеклоочистителя показан как электродвигатель, который является источником привода устройства стеклоочистителя, очищающего ветровое стекло 11 транспортного средства 11, настоящее изобретение не ограничивается до вышеописанных вариантов выполнения и электродвигатель стеклоочистителя может использоваться как источник привода устройства стеклоочистителя заднего стекла транспортного средства, например автомобиля, и устройства стеклоочистителя железнодорожного транспортного средства или самолета.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОДВИГАТЕЛЬ С РЕДУКТОРОМ | 2010 |
|
RU2510561C2 |
| БЕСЩЕТОЧНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ И СТЕКЛООЧИСТИТЕЛЬ | 2013 |
|
RU2587457C1 |
| БЕСЩЕТОЧНЫЙ ДВИГАТЕЛЬ СТЕКЛООЧИСТИТЕЛЯ | 2014 |
|
RU2640377C2 |
| ЭЛЕКТРОДВИГАТЕЛЬ И МОТОР-РЕДУКТОР | 2013 |
|
RU2554931C2 |
| ЭЛЕКТРОДВИГАТЕЛЬ И МОТОР -РЕДУКТОР | 2009 |
|
RU2520937C2 |
| УСТРОЙСТВО ПРИВОДА ДЛЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2371329C1 |
| МОБИЛЬНАЯ КАРОТАЖНАЯ ЛЕБЕДКА | 2000 |
|
RU2191741C2 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ЗАМОК | 2019 |
|
RU2710682C1 |
| УСТРОЙСТВО ДЛЯ ВЫДАЧИ МОЩНОСТИ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2381917C2 |
| ПРИВОДНОЕ УСТРОЙСТВО ДЛЯ ЗВЕЗДОЧЕК ЦЕПНЫХ ПРИВОДОВ | 2004 |
|
RU2343279C2 |



Изобретение относится к электродвигателю для привода механизма стеклоочистителя. Технический результат - увеличении срока службы электродвигателя, повышение точности управления ведущим валом. Электродвигатель стеклоочистителя включает в себя ведущий вал, редуктор, предназначенный для уменьшения частоты вращения ведущего вала, и блок контроллера. Редуктор содержит корпус, первую шестерню, установленную с одного конца ведущего вала, вторую шестерню с соосным ей выходным валом, находящуюся в зацеплении с первой шестерней и образующую совместно с первой шестерней указанный редуктор. Электродвигатель стеклоочистителя включает в себя также блок контроллера, содержащий магнит датчика, закрепленный на другом конце ведущего вала, плату управления, обращенную к другому концу ведущего вала в его осевом направлении, датчик вращения, установленный на участке, обращенном к магниту датчика платы управления, для определения вращения ведущего вала и обмотку, имеющую один конец, электрически соединенный с платой управления и генерирующий электромагнитную силу для вращения ведущего вала посредством подачи тока возбуждения от платы управления. Корпус электродвигателя имеет цилиндрическую форму. Корпус платы управления установлен на концевом участке корпуса электродвигателя. 3 з.п. ф-лы, 7 ил.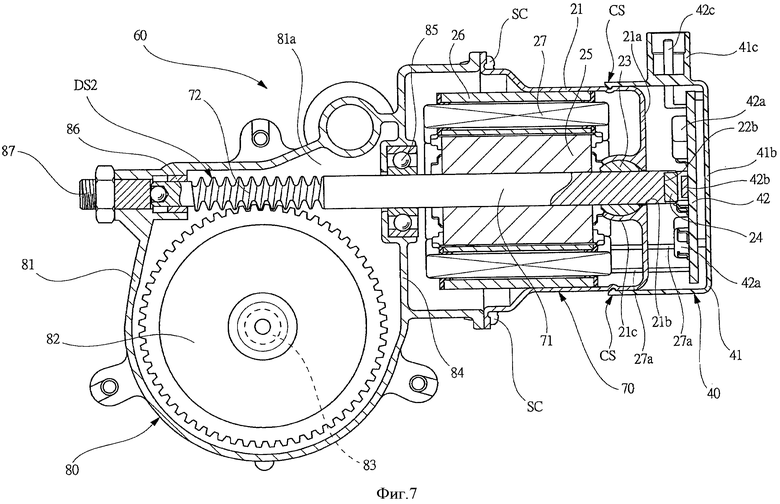
1. Электродвигатель стеклоочистителя, включающий в себя ведущий вал, редуктор, предназначенный для уменьшения частоты вращения ведущего вала, и блок контроллера, отличающийся тем, что
редуктор содержит первую шестерню, установленную с одного конца ведущего вала,
вторую шестерню с соосным ей выходным валом, находящуюся в зацеплении с первой шестерней и образующую совместно с первой шестерней указанный редуктор,
корпус, в котором расположен редуктор,
блок контроллера, содержащий магнит датчика, закрепленный на другом конце ведущего вала,
плату управления, обращенную к другому концу ведущего вала в его осевом направлении,
датчик вращения, установленный на участке, обращенном к магниту датчика платы управления для определения вращения ведущего вала,
корпус платы управления, при этом
электродвигатель имеет корпус, имеющий цилиндрическую форму с дном, и
обмотку, имеющую один конец, электрически соединенный с платой управления и генерирующий электромагнитную силу для вращения ведущего вала посредством подачи тока возбуждения от платы управления, а
корпус платы установлен на концевом участке корпуса электродвигателя.
2. Электродвигатель стеклоочистителя по п. 1, отличающийся тем, что магнит установлен на ведущем валу, и обмотка размещена на внутренней стороне статора, а ведущий вал установлен с возможностью бесконтактного вращения между магнитом и обмоткой внутри статора.
3. Электродвигатель стеклоочистителя по п. 1, отличающийся тем, что плата управления расположена в корпусе, имеющем соединительный участок, к которому подсоединен наружный соединитель.
4. Электродвигатель стеклоочистителя по п. 1, отличающийся тем, что датчик вращения представляет собой MR-датчик, имеющий величину сопротивления, которая изменяется в зависимости от изменения магнитного поля в результате вращения магнита датчика.
| US 20050280323 A1, 22.12.2005 | |||
| US 20060176009 A1, 10.08.2006 | |||
| US 2003062890 A1, 03.04.2003 | |||
| Делинтер | 1975 |
|
SU557123A1 |
| Способ определения кинематической погрешности зубчатых колес | 1984 |
|
SU1220425A1 |
| RU 2075411 C1, 20.03.1997 | |||

