Область техники, к которой относится изобретение
Настоящее изобретение относится к бесщеточному электродвигателю, имеющему ротор, оснащенный постоянными магнитами, и статор, снабженный обмоткой, и к электродвигателю для стеклоочистителя.
Уровень техники
Традиционные примеры электродвигателей, в которых частота вращения ротора может переключаться, раскрыты в патентных документах 1, 2 и 3. Электродвигатель, описанный в патентных документах 1 и 2, имеет корпус, расположенный в корпусе магнит, расположенный внутри корпуса с возможностью вращения сердечник с намотанной вокруг него обмоткой, вращающийся вместе с сердечником вал, закрепленный на валу коллектор, а также щетку, работающую при высоких скоростях, и щетку, работающую при низких скоростях, каждая из которых контактирует с коллектором. Когда водитель приводит в действие переключатель для выбора низкоскоростного режима очистки, ток протекает через щетку, работающую при низких скоростях, чтобы побудить вал вращаться с низкой частотой вращения. С другой стороны, когда водитель приводит в действие переключатель для выбора высокоскоростного режима очистки, ток протекает через щетку, работающую при высоких скоростях, чтобы побудить вал вращаться с высокой частотой вращения.
С другой стороны, электродвигатель, описанный в патентном документе 3, имеет статор кольцевой формы, прикрепленный к внутренней поверхности сборного корпуса и имеющий несколько намотанных вокруг него обмоток, а также ротор, установленный с возможностью вращения внутри статора и имеющий вращающийся вал, и прикрепленный к вращающемуся валу магнит. В электродвигателе, описанном в данном патентном документе 3, отличающиеся друг от друга по фазе намагничивающие токи поступают на несколько обмоток для создания вращающегося магнитного поля, тем самым побуждая ротор вращаться. При этом электродвигатель, описываемый в патентном документе 3, не имеет щеток, описанных в патентных документах 1 и 2.
Документы известного уровня техники
Патентные документы
Патентный документ 1: выложенная заявка на патент Японии №2007202391.
Патентный документ 2: выложенная заявка на патент Японии №2007143278.
Патентный документ 3: выложенная заявка на патент Японии №201093977.
Раскрытие изобретения
Задача изобретения
Каждый из электродвигателей, описанных в патентных документах 1-3, оснащен переключающим элементом, который управляет временем подачи тока на обмотку независимо от того, бесщеточный это электродвигатель или нет. И частота вращения ротора регулируется посредством изменения продолжительности включения переключающего элемента. Таким образом, конструкция электродвигателя делается такой, чтобы ротор мог вращаться с высокой частотой вращения, а управление осуществляется таким образом, что когда ротор вращается с низкой частотой вращения, продолжительность включения уменьшена по сравнению с продолжительностью включения, когда ротор вращается с высокой частотой вращения. Вследствие этого конструкция электродвигателя рассчитывается исходя из случая, когда ротор вращается с высокой частотой вращения, что приводит к увеличению размеров конструкции.
Задача настоящего изобретения - предложить бесщеточный электродвигатель и стеклоочиститель, конструкция которых может быть максимально уменьшена в размерах.
Средства для решения задачи изобретения
Предлагаемый в изобретении бесщеточный электродвигатель содержит статор, имеющий обмотку, на которую подается ток, ротор, вращаемый вращающимся магнитным полем, создаваемым обмоткой, соединенный с исполнительным органом, и переключающий элемент, установленный на пути подачи тока к обмотке, причем бесщеточный электродвигатель имеет блок управления частотой вращения, регулирующий частоту вращения ротора по меньшей мере в двух режимах управления, отличающихся друг от друга частотой вращения ротора, и если из режимов управления выбран первый режим, то блок управления частотой вращения подает ток в обмотку в заданный момент времени подачи питания и регулирует продолжительность включения, означающую нахождение переключающего элемента во включенном состоянии, для регулирования частоты вращения ротора, а если из режимов управления выбран второй режим, то блок управления частотой вращения подает ток в обмотку в более ранний момент времени подачи питания, чем момент времени подачи питания в первом режиме управления, таким образом выполняя регулирование по ослаблению поля путем ослабления вращающегося магнитного поля, создаваемого обмоткой, по сравнению с вращающимся магнитным полем в первом режиме управления для регулирования частотой вращения ротора.
Предлагаемый в настоящем изобретении бесщеточный электродвигатель может дополнительно содержать механизм уменьшения частоты вращения, устанавливаемый на пути передачи мощности привода от ротора к исполнительному органу, причем механизм уменьшения частоты вращения имеет конструкцию, позволяющую уменьшать частоту вращения на выходе относительно частоты вращения на входе.
Предлагаемый в настоящем изобретении бесщеточный электродвигатель может дополнительно содержать блок управления направлением вращения, который обеспечивает вращение ротора вперед и назад посредством переключения направления тока, подаваемого на обмотку.
В предлагаемом в настоящем изобретении бесщеточном электродвигателе может иметься плата управления с блоком управления частотой вращения, и механизм уменьшения частоты вращения и плата управления могут размещаться в общем корпусе.
Стеклоочиститель содержит рычаг стеклоочистителя, являющийся исполнительным органом для очистки ветрового стекла автомобиля, причем рычаг стеклоочистителя соединяется с ротором бесщеточного электродвигателя согласно любому из вышеназванных изобретений.
В предлагаемом в настоящем изобретении стеклоочистителе могут использоваться магнит датчика и датчик частоты вращения, причем магнит датчика вращается вместе с ротором, а датчик частоты вращения выдает сигнал в соответствии со сменой магнитных полюсов магнита датчика при вращении ротора, и, осуществляя управление ослаблением поля, блок управления частотой вращения регулирует частоту вращения ротора на основе сигнала от датчика частоты вращения и вводит опережение по фазе момента времени подачи питания на обмотку якоря на электрический угол 30°.
Осуществление изобретения
Согласно настоящему изобретению (п. 1 формулы изобретения) категория бесщеточного электродвигателя определяется на основании частоты вращения ротора в первом режиме управления, а частота вращения ротора во втором режиме управления может быть получена путем ослабления поля. Вследствие этого бесщеточный электродвигатель может быть максимально уменьшен в размерах.
Согласно настоящему изобретению (п. 2 формулы изобретения) механизм уменьшения частоты вращения может уменьшать частоту вращения ротора и увеличивать крутящий момент на выходе по сравнению с крутящим моментом на входе.
Согласно настоящему изобретению (п. 3 формулы изобретения) ротор может вращаться в обратном направлении посредством переключения направления подачи тока на обмотку якоря.
Согласно настоящему изобретению (п. 4 формулы изобретения), вследствие того что механизм уменьшения частоты вращения и плата управления располагаются в общем корпусе, бесщеточный электродвигатель может быть уменьшен в размерах, и можно улучшить возможности по его размещению на целевом объекте.
Согласно настоящему изобретению (п. 5 формулы изобретения) ветровое стекло автомобиля может очищаться посредством передачи мощности привода ротора бесщеточного электродвигателя рычагу стеклоочистителя с целью приведения его в действие.
Согласно настоящему изобретению (п. 6 формулы изобретения) при осуществлении управления ослаблением поля частота вращения ротора может регулироваться посредством определения частоты вращения по сигналу датчика частоты вращения и опережения по фазе момента времени подачи питания на обмотку якоря на электрический угол 30°.
Краткое описание чертежей
На чертежах показано:
на фиг. 1 - схематичный вид примера осуществления изобретения, в котором предлагаемый в настоящем изобретении бесщеточный электродвигатель используется в стеклоочистителе автомобиля,
на фиг. 2 - внешний вид предлагаемого в настоящем изобретении бесщеточного электродвигателя,
на фиг. 3 - вид снизу предлагаемого в настоящем изобретении бесщеточного электродвигателя со снятой защитной крышкой,
на фиг. 4 - блок-схема системы управления предлагаемым в настоящем изобретении бесщеточным электродвигателем,
на фиг. 5 - диаграмма зависимости между частотой вращения и крутящим моментом бесщеточного электродвигателя,
на фиг. 6 - диаграмма зависимости между частотой вращения и углом опережения в бесщеточном электродвигателе,
на фиг. 7 - диаграмма зависимости между кпд и углом опережения в бесщеточном электродвигателе,
на фиг. 8 - схематичный вид другого примера осуществления изобретения, в котором предлагаемый в настоящем изобретении бесщеточный электродвигатель используется в стеклоочистителе автомобиля,
на фиг. 9 - внешний вид предлагаемого в настоящем изобретении бесщеточного электродвигателя,
на фиг. 10 - вид снизу предлагаемого в настоящем изобретении бесщеточного электродвигателя со снятой защитной крышкой,
на фиг. 11 - блок-схема системы управления предлагаемым в настоящем изобретении бесщеточным электродвигателем,
на фиг. 12 - диаграмма, иллюстрирующая пример характеристик предлагаемого в настоящем изобретении бесщеточного электродвигателя,
на фиг. 13 - схематичный вид еще одного примера осуществления изобретения, в котором предлагаемый в настоящем изобретении бесщеточный электродвигатель используется в стеклоочистителе автомобиля,
на фиг. 14 - внешний вид предлагаемого в настоящем изобретении бесщеточного электродвигателя,
на фиг. 15 - вид снизу предлагаемого в настоящем изобретении бесщеточного электродвигателя со снятой защитной крышкой,
на фиг. 16 - блок-схема системы управления предлагаемым в настоящем изобретении бесщеточным электродвигателем,
на фиг. 17A-17C - диаграммы, показывающие примеры первого и второго режимов управления, которые реализуются предлагаемым в настоящем изобретении бесщеточным электродвигателем,
на фиг. 18 - диаграмма, иллюстрирующая характеристики предлагаемого в настоящем изобретении бесщеточного электродвигателя,
на фиг. 19 - диаграмма, показывающая зависимость характеристик предлагаемого в настоящем изобретении бесщеточного электродвигателя от электрического угла,
на фиг. 20 - диаграмма, иллюстрирующая один из примеров режимов управления, осуществляемого в предлагаемом в настоящем изобретении бесщеточном электродвигателе на основе рабочего угла,
на фиг. 21 - диаграмма, иллюстрирующая один из примеров режимов управления, осуществляемого в предлагаемом в настоящем изобретении бесщеточном электродвигателе на основе времени,
на фиг. 22 - диаграмма, иллюстрирующая один из примеров режимов управления, осуществляемого на основе времени в предлагаемом в настоящем изобретении бесщеточном электродвигателе,
на фиг. 23A и 23B - таблицы, показывающие примеры первого и второго режимов управления, осуществляемых в предлагаемом в настоящем изобретении бесщеточном электродвигателе,
на фиг. 24А и 24B - виды в разрезе конструкций ротора для предлагаемого в настоящем изобретении бесщеточного электродвигателя,
на фиг. 25 - схематичный вид одного из примеров отношения между ротором и статором в предлагаемом в настоящем изобретении бесщеточном электродвигателе,
на фиг. 26 - схематичный вид другого примера отношения между ротором и статором в предлагаемом в настоящем изобретении бесщеточном электродвигателе, и
на фиг. 27 - диаграмма, показывающая характеристики предлагаемого в настоящем изобретении бесщеточного электродвигателя.
Лучший вариант осуществления изобретения
Ниже более подробно описывается один из вариантов осуществления настоящего изобретения со ссылкой на прилагаемые к описанию чертежи. Показанный на фиг. 1 автомобиль 10 имеет ветровое стекло 11. Кроме того, упомянутый автомобиль 10 имеет стеклоочиститель 12 для очистки ветрового стекла 11. Упомянутый стеклоочиститель 12 имеет рычаг 14 стеклоочистителя, который совершает возвратно-поступательное движение на поворотной оси 13, и рычаг 16 стеклоочистителя, который совершает возвратно-поступательное движение на поворотной оси 15. Щетка 17 стеклоочистителя устанавливается на свободном конце рычага 14 стеклоочистителя, а щетка 18 - на свободном конце рычага 16 стеклоочистителя. Стеклоочиститель 12, кроме того, имеет бесщеточный электродвигатель 19, служащий в качестве источника мощности привода для приведения в действие рычагов 14 и 16 стеклоочистителя. В данном варианте осуществления изобретения мощность привода бесщеточного электродвигателя 19 передается рычагам 14 и 16 стеклоочистителя посредством механизма 20 кинематической передачи, состоящего из рычагов и соединительных тяг.
Бесщеточный электродвигатель 19 имеет конструкцию, показанную на фиг. 2, 3 и 4. В данном варианте осуществления изобретения в качестве бесщеточного электродвигателя 19 используется трехфазный четырехполюсный бесщеточный электродвигатель 19. Бесщеточный электродвигатель 19 имеет статор 21 и ротор 22. Бесщеточный электродвигатель 19 дополнительно имеет цилиндрический корпус 23 с закрытым концом, и статор 21 крепится к внутренней окружности корпуса 23. Как показано на фиг. 4, статор 21 имеет трехфазные, а именно U-, V- и W-фазные обмотки 21а, 21b, и 21с. Ротор 22 монтируется внутри статора 21 и имеет вращающийся вал 22а и четырехполюсные постоянные магниты 22b, установленные на вращающемся валу 22а. Внутри корпуса 23 установлено несколько непоказанных на чертеже подшипников, и вращающийся вал 22а опирается на эти подшипники.
Кроме того, бесщеточный электродвигатель 19 имеет полую раму 24, и полая рама 24 и корпус 23 соединяются друг с другом с помощью непоказанного на чертеже соединительного элемента. Практически половина вращающегося вала 22а в продольном направлении находится внутри корпуса 23, а остающаяся часть вращающегося вала 22а располагается внутри рамы 24. На внешней окружности упомянутой части вращающегося вала 22а, расположенной внутри рамы 24, выполнена червячная шестерня 22с. Внутри рамы 24 имеется червячное колесо 25. На наружной окружности этого червячного колеса 25 выполнена зубчатка 25а, и зубчатка 25а и червячная шестерня 22с находятся в зацеплении друг с другом. Кроме того, на остающейся части вращающегося вала 22а, находящейся внутри рамы 24, устанавливается магнит 38 датчика. Упомянутый магнит 38 датчика вращается вместе с вращающимся валом 22а. Магнит 38 датчика намагничен таким образом, что его N и S полюса чередуются в окружном направлении вращающегося вала 22а.
Кроме того, червячное колесо 25 выполнено с возможностью вращения вместе с выходным валом 26. Червячная шестерня 22с и зубчатка 25а в данном варианте осуществления изобретения совместно образуют механизм 27 уменьшения частоты вращения. Данный механизм 27 уменьшения частоты вращения является средством уменьшения частоты вращения выходного вала 26 (частоты вращения на выходе) относительно частоты вращения ротора 22 (частоты вращения на входе) при передаче мощности привода ротора 22 выходному валу 26. Кроме того, верхняя в плоскости фиг. 2 часть рамы 24 имеет непоказанное на чертеже отверстие для вала. Червячное колесо 25 крепится к одному концу выходного вала 26, а другой конец выходного вала 26 выходит наружу через выполненное в раме 24 отверстие для вала и соединяется с механизмом 20 кинематической передачи, как это показано на фиг. 1.
На противоположной отверстию для вала стороне рамы 24 имеется проем 24а. Данный проем 24а необходим для установки червячного колеса 25 и т.п. внутрь рамы 24. Кроме того, к раме 24 крепится защитная крышка 28, закрывающая проем 24а. На фиг. 2 показан один из примеров, в котором на защитной крышке установлена плата 29 управления.
Как видно из фиг. 4, на упомянутой плате 29 управления размещается приводное устройство 33 для управления бесщеточным электродвигателем 19. Упомянутое приводное устройство 33 содержит инверторную схему 30 управления подачей питания на каждую из обмоток 21а, 21b и 21с. Упомянутая инверторная схема 30 соединяется с непоказанным на чертеже терминалом. Рама 24 имеет непоказанный на чертеже разъем, и посредством вставки в разъем непоказанной на чертеже приемной колодки электрического провода, соединенного с внешним источником питания 31, внешний источник питания 31 и инверторная схема 30 соединяются друг с другом. Упомянутым внешним источником питания 31 является аккумуляторная батарея, конденсатор или т.п., устанавливаемые на автомобиле 10.
Кроме того, инверторная схема 30 имеет переключающий элемент 30а для соединения обмоток 21а, 21b и 21с с источником 31 внешнего питания. Данный переключающий элемент 30а представляет собой, к примеру, полупроводниковое устройство типа полевого транзистора. Более конкретно, переключающий элемент 30а включает в себя три плюсовых переключающих элемента, соответствующих фазам U, V и W и соединенных с положительным полюсом внешнего источника питания 31, и три минусовых переключающих элемента, соответствующих фазам U, V и W и соединенных с отрицательным полюсом внешнего источника питания 31. Когда переключающий элемент 30а замкнут (включен), ток от внешнего источника питания поступает на обмотки 21а, 21b и 21с. Напротив, когда переключающий элемент 30а разомкнут (выключен), ток от внешнего источника питания не поступает на обмотки 21а, 21b и 21с. Кроме того, схема 32 управления (контроллер), имеющая функцию управления переключением между включенным и выключенным состояниями переключающего элемента 30а, соединяется с инверторной схемой 30.
Данная схема 32 управления представляет собой широкоизвестный микрокомпьютер, включающий в себя центральный процессор, оперативную память, постоянную память и т.п. Приводное устройство 33 дополнительно имеет схему 34 выработки широтно-модулированного (шим) сигнала, и сигнал со схемы 34 выработки широтно-модулированного сигнала подается на вход схемы 32 управления. Данная схема 32 управления выдает управляющий сигнал для управления тремя минусовыми переключающими элементами, и упомянутый широтно-модулированный сигнал накладывается на этот управляющий сигнал. То есть упомянутые три минусовых переключающих элемента управляются широтно-модулированными импульсами, так что они периодически включаются в каждом периоде времени подачи питания. И путем управления отношением, при котором упомянутые три минусовых переключающих элемента по отдельности включены, т.е. путем управления продолжительностью включения может осуществляться управление током, подаваемым на каждую обмотку 21а, 21b и 21с. То есть период времени подачи питания, в течение которого электрическая энергия подается на обмотки 21а, 21b и 21с, может быть увеличен или уменьшен в пределах от 0% до 100% относительно полного периода времени подачи питания. Более того, схема 32 управления сохраняет в памяти данные, программу и т.д. для управления, осуществляемого во время запуска бесщеточного электродвигателя 19. Время запуска бесщеточного электродвигателя 19 является исходным временем начала вращения бесщеточного электродвигателя 19 из состояния покоя.
При этом к свободному концу каждой обмотки 21а, 21b и 21с подсоединен блок 35 обнаружения индуцированного напряжения. Упомянутый блок 35 обнаружения индуцированного напряжения представляет собой датчик, который обнаруживает индуцированное напряжение, возникающее в каждой обмотке 21а, 21b и 21с в связи с вращением ротора 22, и сигнал обнаружения с блока 35 обнаружения индуцированного напряжения поступает на вход схемы 32 управления. Упомянутая схема 32 управления определяет положение вращения ротора 22 (фазу в направлении вращения) на основе сигнала обнаружения, поступающего с блока 35 обнаружения индуцированного напряжения.
При этом бесщеточный электродвигатель 19 в данном варианте выполнения осуществляет управление переключением между включенным и выключенным состояниями переключающего элемента 30а для изменения на обратное направления подачи питания на обмотки 21а, 21b и 21с, обеспечивая возможность вращения ротора 22 вперед и назад.
Кроме того, внутри рамы 24 устанавливается датчик 36 выходного вала, определяющий по меньшей мере либо частоту вращения, либо абсолютное положение выходного вала 26. Абсолютное положение означает угол поворота выходного вала 26 относительно опорного положения. Упомянутое опорное положение может быть любым положением в диапазоне 360°. Сигнал обнаружения от этого датчика 36 выходного вала поступает на вход схемы 32 управления. Кроме того, на плате управления устанавливается ИС 39 с датчиком Холла. Упомянутая ИС 39 с датчиком Холла крепится таким образом, чтобы бесконтактно взаимодействовать с магнитом 38 датчика. При чередовании магнитных полюсов магнита 38 датчика в результате вращения ротора 22 ИС 39 с датчиком Холла осуществляет операцию переключения, вырабатывая переключающий сигнал (сигнал включения/выключения). Схема управления 32 может определять частоту вращения (скорость вращения) ротора 22 на основе переключающего сигнала, поступающего от ИС 39 с датчиком Холла. Кроме того, в салоне автомобиля 10 устанавливается переключатель 37 стеклоочистителя, и рабочий сигнал от переключателя 37 стеклоочистителя поступает на вход схемы 32 управления.
В стеклоочистителе 12 переключатель 37 приводится в действие водителем с учетом условий, таких как интенсивность выпадения дождя, снега и т.д., тем самым обеспечивая переключение скорости перемещения рычагов 14 и 16 стеклоочистителя при очистке ветрового стекла. Если интенсивность выпадения дождя или снега мала, водитель может с помощью переключателя 37 стеклоочистителя выбрать низкоскоростной режим очистки, чтобы побудить рычаги 14 и 16 стеклоочистителя работать с заданной медленной скоростью. Напротив, если интенсивность выпадения дождя или снега велика, водитель может с помощью переключателя 37 стеклоочистителя выбрать высокоскоростной режим очистки, чтобы побудить рычаги 14 и 16 стеклоочистителя работать с более высокой скоростью, чем скорость в низкоскоростном режиме. Водитель определяет интенсивность выпадения дождя или снега по своему собственному разумению, и здесь нет критерия определения, велика или мала интенсивность осадков. И типовые шаблоны, данные, арифметические выражения и т.п., относящиеся к низкоскоростному или высокоскоростному режиму работы, заранее сохраняются в схеме 32 управления для управления переключающим элементом 30a.
Ниже описывается управление бесщеточным электродвигателем 19 данного варианта осуществления изобретения. Если с помощью переключателя 37 стеклоочистителя выбирается низкоскоростной режим очистки, то сигнал обнаружения от блока 35 обнаружения индуцированного напряжения поступает на вход схемы 32 управления. На основе сигнала обнаружения с блока 35 обнаружения индуцированного напряжения схема управления 32 определяет положение вращения (угол в направлении вращения) ротора 22 и осуществляет управление подачей питания исходя из положения вращения ротора 22. То есть плюсовые переключающие элементы последовательно включаются на электрический угол 120°, и минусовые переключающие элементы с фазой, отличающейся от фазы плюсовых переключающих элементов, последовательно включаются на электрический угол 120°, тем самым переключая подачу питания на обмотки 21а, 21b и 21с соответствующих фаз для коммутации фазного тока.
При повторении вышеописанного управления статором 21 формируется вращающееся магнитное поле для вращения ротора 22. Более того, бесщеточному электродвигателю 19 свойственно увеличение частоты вращения с увеличением силы тока. Кроме того, бесщеточному электродвигателю 19 свойственно уменьшение крутящего момента по мере увеличения частоты вращения. Если выбран низкоскоростной режим очистки, управление продолжительностью включения осуществляется без регулирования частоты вращения путем ослабления поля, вследствие чего текущая частота вращения ротора 22 поддерживается вблизи требуемой частоты вращения. Более того, если выбран низкоскоростной режим очистки, то используется заданное фиксированное значение времени подачи питания на каждую обмотку 21а, 21b и 21с.
С другой стороны, если выбран высокоскоростной режим очистки, регулирование частоты вращения путем ослабления поля осуществляется без изменения тока, поступающего в обмотки 21а, 21b и 21с. Термин "регулирование частоты вращения путем ослабления поля" означает регулирования частоты вращения путем максимального ослабления магнитного поля, создаваемого посредством подачи тока в обмотки 21а, 21b и 21с. Как особо описывается ниже, регулирование частоты вращения путем ослабления поля - это регулирование опережения по фазе момента времени подачи питания на обмотки 21а, 21b и 21с на 30° (опережающая фаза) по сравнению с фазой низкоскоростного режима. То есть, если выбран высокоскоростной режим очистки, то вращающееся магнитное поле, формируемое обмотками 21а, 21b и 21с, слабее, чем вращающееся магнитное поле, формируемое обмотками 21а, 21b и 21с в низкоскоростном режиме очистки. Когда осуществляется упомянутое регулирование частоты вращения путем ослабления поля противоэлектродвижущая сила в обмотках 21а, 21b и 21с снижается, а частота вращения ротора 22 повышается. В угле опережения зависимость между обмотками якоря и постоянными магнитами в направлении вращения ротора 22 представлена электрическим углом.
На фиг. 5 показана диаграмма характеристик бесщеточного электродвигателя 19. На фиг. 5 по вертикальной оси откладывается частота вращения бесщеточного электродвигателя 19, а по горизонтальной оси - его крутящий момент. Кроме того, пунктирной линией на фиг. 5 показан пример низкоскоростной характеристики, соответствующей низкоскоростному режиму очистки, а жирной линией - пример высокоскоростной характеристики, соответствующей высокоскоростному режиму очистки.
В бесщеточным электродвигателе 19 данного варианта осуществления изобретения для определения его категории имеется установочная характеристика, обозначенная, например, жирной линией, позволяющая получить частоту вращения и крутящий момент, соответствующие низкоскоростной характеристике на фиг. 5. Вследствие этого, если с помощью переключателя 37 стеклоочистителя выбран низкоскоростной режим очистки, то требуемые частота вращения и крутящий момент могут быть получены в пределах области значений, равных или лежащих ниже установочной характеристики.
Напротив, если с помощью переключателя 37 стеклоочистителя выбран высокоскоростной режим очистки, и частота вращения и крутящий момент располагаются в области значений выше установочной характеристики, схема 32 управления осуществляет регулирование частоты вращения путем ослабления поля, тем самым позволяя получить частоту вращения и крутящий момент, располагающиеся выше установочной характеристики. При этом характеристика бесщеточного электродвигателя 19 казалось бы становится эквивалентной характеристике, обозначенной на фиг. 5 штрихпунктирной линией. То есть в бесщеточном электродвигателе 19 конструктивная категория определяется на основании низкоскоростного режима очистки, и бесщеточный электродвигатель 19 может быть максимально уменьшен в размерах. А крутящий момент может быть увеличен путем увеличения частоты вращения бесщеточного электродвигателя 19 без изменения силы тока, что означает, что моментный коэффициент относительно увеличился. Другими словами, бесщеточный электродвигатель 19 может создавать максимально высокий крутящий момент при меньшем потреблении энергии, тем самым повышая кпд электродвигателя.
На фиг. 6 показана диаграмма отношения между углом опережения в виде момента времени подачи питания и частотой вращения бесщеточного электродвигателя 19. На фиг. 6 по горизонтальной оси откладывается ток, а по вертикальной оси - частота вращения. Как показано на фиг. 6, частота вращения в случае угла опережения 30° выше, чем частота вращения при угле опережения 0°. Угол опережения 0° является фиксированным значением момента времени подачи питания, описанным в низкоскоростном режиме работы. Более того, на фиг. 7 показана диаграмма отношения между углом опережения в виде момента времени подачи питания и кпд бесщеточного электродвигателя 19. На фиг. 7 по горизонтальной оси откладывается ток, а по вертикальной оси - кпд. Как видно из фиг. 7, кпд при угле опережения 30° выше, чем кпд при угле опережения 0°.
При этом в общем, в автомобильных стеклоочистителях низкоскоростной режим очистки используется чаще, чем высокоскоростной режим. По этой причине, если в стеклоочистителе 12 используется бесщеточный электродвигатель 19 данного варианта выполнения, эффект снижения потребления энергии велик, если выбран низкоскоростной режим очистки.
При этом в бесщеточном электродвигателе 19 данного варианта выполнения, если осуществляется регулирование частоты вращения путем ослабления поля, положение вращения ротора 22 может быть определено на основе сигнала обнаружения, поступающего от блока 35 обнаружения индуцированного напряжения.
Кроме того, помимо сигнала обнаружения, поступающего от блока 35 обнаружения индуцированного напряжения, положение вращения ротора 22 может быть определено исходя из сигнала обнаружения, поступающего от датчика 36 выходного вала, и передаточного числа механизма 27 уменьшения частоты вращения. Как только что было сказано, в бесщеточном электродвигателе 19 данного варианта выполнения положение вращения ротора 22 может быть определено с помощью блока 35 обнаружения индуцированного напряжения и датчика 36 выходного вала, если он имеется.
При этом в бесщеточном электродвигателе 19 данного варианта выполнения частота вращения и крутящий момент, соответствующие высокоскоростной характеристике, могут быть получены посредством осуществления регулирования ослабления поля, и бесщеточный электродвигатель 19 оснащен механизмом 27 уменьшения частоты вращения. Вследствие этого в бесщеточном электродвигателе 19 передаточное число механизма 27 уменьшения частоты вращения может быть установлено таким, что может быть обеспечена характеристика, т.е. частота вращения и крутящий момент, подходящие для условий эксплуатации рычагов 14 и 16 стеклоочистителя 12. Упомянутое передаточное отношение механизма 27 уменьшения частоты вращения является значением, получаемым путем деления частоты вращения выходного вала 26 на частоту вращения ротора 22, и частота вращения выходного вала 26 уменьшается при увеличении передаточного отношения механизма 27 уменьшения частоты вращения, а крутящий момент выходного вала 26 увеличивается по сравнению с крутящим моментом ротора 22.
При этом в бесщеточном электродвигателе 19 данного варианта выполнения регулировка угла опережения во время вращения вперед и назад бесщеточного электродвигателя 19 может быть оптимизирована на основе определения положения вращения ротора 22. При этом в виду того, что бесщеточный электродвигатель 19 данного варианта выполнения не имеет щеток, коллектора и т.д., отсутствует момент трения из-за скольжения щеток по коллектору, что предотвращает уменьшение кпд электродвигателя и повышение температуры щетки и исключает ограничение мощности электродвигателя. Кроме того, в бесщеточном электродвигателе 19 данного варианта выполнения отсутствуют шумы и рабочие звуки, возникающие при работе щеток, и обеспечивается тишина.
При этом в бесщеточном электродвигателе 19 данного варианта выполнения как плата 29 управления, так и механизм 27 уменьшения частоты вращения размещаются внутри полости, ограниченной рамой 24 и защитной крышкой 28, т.е., с механической и электрической точек зрения, внутри несущей конструкции. Вследствие этого весь бесщеточный электродвигатель 19 может быть выполнен компактным, и могут быть улучшены возможности по его размещению в автомобиле.
При этом в бесщеточном электродвигателе 19 данного варианта выполнения, если выбран высокоскоростной режим очистки для осуществления регулирования частоты вращения путем ослабления поля, то схема 32 управления осуществляет управление определением частоты вращения ротора 22 на основе сигнала включения/выключения от ИС 39 с датчиком Холла. Кроме того, частота вращения ротора 22 может регулироваться посредством опережения момента времени подачи питания на обмотки 21а, 21b и 21с на электрический угол 30°.
В частности, в стеклоочистителе 12 время с момента, когда рычаги 14 и 16 начнут работу с их исходных позиций, до момента, когда они, пройдя через позиции реверсирования, снова вернутся на свои исходные позиции, желательно поддерживать постоянным. С другой стороны, существует возможность того, что из-за некоторых условий, таких как сопротивление ветру, возникающее при движении автомобиля, и сопротивление перемещению щеток 17 и 18 стеклоочистителя, реальная скорость рычагов 14 и 16 стеклоочистителя при очистке изменится, что приведет к изменению требуемого времени. Таким образом, одновременно с осуществлением регулирования частоты вращения путем ослабления поля может осуществляться управление продолжительностью включения. Как будет особо описано ниже, схема 32 управления непосредственно определяет реальную скорость перемещения рычагов 14 и 16 стеклоочистителя при очистке на основе сигнала от ИС 39 с датчиком Холла. И, осуществляя обратную связь, схема 32 управления регулирует продолжительность включения таким образом, что реальная скорость рычагов 14 и 16 стеклоочистителя при очистке поддерживается близкой к целевой скорости очистки. Таким образом, посредством регулирования продолжительности включения в период времени с момента, когда осуществлялась предшествующая регулировка времени подачи питания, до момента осуществления следующей регулировки момента времени подачи питания скорость перемещения рычагов 14 и 16 стеклоочистителя при очистке может точно регулироваться.
Далее описывается отношение между рассмотренной в данном варианте выполнения конструкцией и конструкцией, предлагаемой в настоящем изобретении. Приводное устройство 33, содержащее схему 32 управления, соответствует блоку управления частотой вращения и блоку управления направлением вращения в настоящем изобретении, рама 24 и защитная крышка 28 соответствуют корпусу в настоящем изобретении, ветровое стекло 11 соответствует ветровому стеклу в настоящем изобретении, рычаги 14 и 16 соответствуют исполнительному органу в настоящем изобретении, переключающий элемент 30а соответствует переключателю в настоящем изобретении, а ИС 39 с датчиком Холла соответствует датчику частоты вращения в настоящем изобретении. Более того, низкоскоростной режим очистки соответствует первому режиму управления в настоящем изобретении, а высокоскоростной режим очистки соответствует второму режиму управления в настоящем изобретении.
Само собой разумеется, что настоящее изобретение не ограничивается вышеописанным вариантом осуществления и может быть различным образом модифицировано, не отклоняясь от существа изобретения. Например, переключатель стеклоочистителя не ограничивается переключателем, приводимым в действие водителем, и может быть переключателем обнаружения, имеющим функцию обнаружения интенсивности выпадения дождя, снега и т.д. С описанной выше конструкцией блок управления частотой вращения автоматически запускает стеклоочиститель исходя из интенсивности выпадения дождя, снега и т.д., и осуществляет управление автоматическим переключением между низкоскоростным и высокоскоростным режимами очистки. В таком случае блок управления частотой вращения заранее сохраняет в памяти данные, такие как интенсивность выпадения дождя, снега и т.д., которые служат основой для переключения между низкоскоростным и высокоскоростным режимами очистки. Кроме того, по желанию может меняться количество обмоток якоря и количество постоянных магнитов.
Кроме того, стеклоочиститель не ограничивается стеклоочистителем для очистки лобового ветрового стекла, но может быть и стеклоочистителем для очистки заднего стекла. Более того, стеклоочиститель может иметь конструкцию, в которой рычаги стеклоочистителя совершают возвратно-поступательное движение, используя в качестве оси поворота выходной вал. Дополнительно стеклоочиститель может быть конфигурирован таким образом, что два рычага стеклоочистителя приводятся в действие отдельными бесщеточными электродвигателями. При этом бесщеточный электродвигатель такого варианта осуществления изобретения может быть двигателем с внутренним постоянным магнитом, имеющим конструкцию с заглубленными в стальной сердечник постоянными магнитами.
При этом количество режимов работы, выбираемых с помощью переключателя стеклоочистителя, не ограничивается двумя режимами, т.е. низкоскоростным и высокоскоростным режимами очистки, но может составлять три и более режима. Например, количество режимов управления частотой вращения ротора может равняться трем, т.е. могут иметься низкоскоростной режим очистки, режим очистки с промежуточной скоростью и высокоскоростной режим очистки. В данном случае частота вращения ротора в режиме очистки с промежуточной скоростью выше, чем в низкоскоростном режиме, и ниже, чем частота вращения ротора в высокоскоростном режиме очистки.
И если из трех режимов очистки выбран низкоскоростной режим, то блок управления частотой вращения подает ток в обмотки якоря в заданные моменты времени подачи питания и регулирует продолжительность включения, являющуюся продолжительностью включенного состояния переключающего элемента, чтобы регулировать частоту вращения ротора. При этом если выбран режим очистки с промежуточной скоростью, то ток подается в обмотки якоря в моменты времени подачи питания с большим опережением, чем при низкоскоростном режиме. При этом ослабление вращающегося магнитного поля, создаваемого обмотками якоря, больше, чем то, что осуществляется при выборе низкоскоростного режима очистки, тем самым обеспечивая возможность регулирования частоты вращения ротора. При этом если частота вращения ротора меняется между низкоскоростным режимом и режимом очистки с промежуточной скоростью, то низкоскоростной режим очистки соответствует первому режиму управления, предлагаемому в настоящем изобретении, а режим очистки с промежуточной скоростью соответствует второму режиму управления, предлагаемому в настоящем изобретении.
С другой стороны, если из трех режимов очистки выбран режим очистки с промежуточной скоростью, то блок управления частотой вращения подает ток на обмотки в заданные моменты времени подачи питания и регулирует продолжительность включения, т.е. продолжительность включенного состояния переключающего элемента, для регулирования частоты вращения ротора. Напротив, если выбран высокоскоростной режим очистки, то ток подается в обмотки в моменты времени подачи питания с большим опережением, чем при выборе режима очистки с промежуточной скоростью. При этом ослабление вращающегося магнитного поля, создаваемого обмотками, больше, чем то, что осуществляется при выборе режима очистки с промежуточной скоростью, тем самым обеспечивая возможность регулирования частоты вращения ротора. При этом если частота вращения ротора меняется между режимом очистки с промежуточной скоростью и высокоскоростным режимом очистки, то режим очистки с промежуточной скоростью соответствует первому режиму управления, предлагаемому в настоящем изобретении, а высокоскоростной режимом очистки соответствует второму режиму управления, предлагаемому в настоящем изобретении.
При этом предлагаемый в настоящем изобретении бесщеточный электродвигатель может представлять собой бесщеточный электродвигатель с внутренним ротором, имеющий ротор, располагающийся внутри статора, или бесщеточный электродвигатель с наружным ротором, имеющий ротор, располагающийся снаружи статора. При этом бесщеточный электродвигатель такого варианта выполнения может использоваться в автомобильных устройствах обеспечения удобства и комфорта, например в автоматической сдвижной двери, в люке в крыше автомобиля или в автоматическом стеклоподъемнике в качестве источника приводного усилия для приведения в действие исполнительного органа, такого как дверь, люк или стекло.
Далее по тексту подробно рассматривается другой вариант осуществления настоящего изобретения со ссылкой на прилагаемые к описанию чертежи. Показанный на фиг. 8 автомобиль 110 имеет ветровое стекло 111. Кроме того, упомянутый автомобиль 110 имеет стеклоочиститель 112 для очистки ветрового стекла. Стеклоочиститель 112 имеет рычаг 114, совершающий возвратно-поступательное движение на поворотной оси 113, и рычаг 116, совершающий возвратно-поступательное движение на поворотной оси 115. Щетка 117 стеклоочистителя устанавливается на свободном конце рычага 114 стеклоочистителя, а щетка 118 - на свободном конце рычага 116 стеклоочистителя. Упомянутый стеклоочиститель 112, кроме того, имеет бесщеточный электродвигатель 119, служащий в качестве источника мощности привода для приведения в действие рычагов 114 и 116. В данном варианте осуществления изобретения мощность привода бесщеточного электродвигателя 119 передается щеткам 114 и 116 посредством механизма 120 кинематической передачи, состоящего из таких частей, как рычаги и тяги.
Бесщеточный электродвигатель 119 имеет конструкцию, показанную на фиг. 9, 10 и 11. В данном варианте осуществления изобретения в качестве бесщеточного электродвигателя 119 используется трехфазный четырехполюсный бесщеточный электродвигатель 119. Бесщеточный электродвигатель 119 имеет статор 121 и ротор 122. Бесщеточный электродвигатель 119, кроме того, имеет цилиндрический корпус 123 с закрытым концом, и имеющийся статор 121 крепится к внутренней окружности корпуса 123. Как показано на фиг. 11, статор 121 имеет трехфазные, а именно U-, V- и W-фазную обмотки 121а, 121b и 121с. Как показано на фиг.10, внутри статора 121 располагается ротор 122. Ротор 122 имеет вращающийся вал 122а и установленные на вращающемся валу 122а четырехполюсные постоянные магниты 122b. Для простоты, на фиг. 11 вращающийся ротор 122 опущен. Внутри корпуса 123 установлено несколько непоказанных на чертеже подшипников, и на упомянутые подшипники опирается с возможностью вращения вращающийся вал 122.
Кроме того, бесщеточный электродвигатель 119 имеет полую раму 124, и рама 124 и корпус 123 соединяются вместе с помощью непоказанного на чертеже крепящего элемента. По существу половина длины вращающегося вала 122а в продольном направлении располагается внутри корпуса 123, а остающаяся часть располагается внутри рамы 124. На наружной окружности упомянутой остающейся части вращающегося вала 122а, располагающейся внутри рамы 124, выполнена червячная шестерня 122с. Внутри рамы 124 установлено червячное колесо 125. На наружной окружности этого червячного колеса 125 выполнена зубчатка 125а, и упомянутая зубчатка 125а и червячная шестерня 122с входят в зацепление друг с другом. Кроме того, на остающейся части вращающегося вала 122а, располагающейся внутри рамы 124, устанавливается магнит 138 датчика. Упомянутый магнит 138 датчика вращается вместе с вращающимся валом 122а. Магнит 138 датчика намагничен таким образом, что его N и S полюса чередуются по длине окружности вращающегося вала 122а.
При этом червячное колесо 125 выполнено с возможностью вращения вместе с выходным валом 126. В данном варианте осуществления изобретения червячная шестерня 122с и зубчатка 125а совместно образуют механизм 127 уменьшения частоты вращения. Передаточное число этого механизма 127 уменьшения частоты вращения представляет собой средство уменьшения частоты вращения выходного вала 126 относительно частоты вращения ротора 122, когда мощность привода ротора 122 передается выходному валу 126. При этом, как показано на фиг. 9, верхняя часть рамы 124 снабжена непоказанным на чертеже отверстием для вала. Червячное колесо 125 закреплено на одном конце выходного вала 126, а другой конец выходного вала 126 выходит наружу через выполненное в раме 124 отверстие для вала и соединяется с механизмом 120 кинематической передачи, как это показано на фиг. 8.
На стороне рамы 124, противоположной отверстию для вала, выполнен проем 124а. Данный проем 124а предназначен для установки червячного колеса 125 и т.п. внутрь рамы 124. Кроме того, к раме 124 крепится закрывающая проем 124а защитная крышка 128. Защитная крышка 128 имеет форму подноса, и в полость, ограниченную защитной крышкой 128 и рамой 124 устанавливается плата 129 управления. Один из примеров, когда плата 129 управления крепится к защитной крышке 128, показан на фиг. 8.
Как показано на фиг. 11, на упомянутой плате 129 управления устанавливается приводное устройство 133 для управления бесщеточным электродвигателем 119. Данное приводное устройство 133 имеет инверторную схему 130 для регулирования подачи питания на каждую из обмоток 121а, 121b и 121с. Упомянутая инверторная схема 130 соединяется с непоказанным на чертеже терминалом. Рама 124 снабжена непоказанным на чертеже разъемом, и при вставлении непоказанной на чертеже гнездовой части соединителя электрического провода, соединенного с внешним источником 131 питания в разъем, внешний источник 131 питания и инверторная схема 130 соединяются друг с другом. Внешний источник 131 питания представляет собой установленную на автомобиле 110 аккумуляторную батарею, конденсатор или т.п.
Кроме того, инверторная схема 130 оснащается переключающим элементом 130а для соединения обмоток 121а, 121b и 121с с внешним источником 131 питания и их отсоединения от внешнего источника 131 питания. Данный переключающий элемент 130а представляет собой, к примеру, полупроводниковое устройство, такое как полевой транзистор. Точнее говоря, переключающий элемент 130а включает в себя три плюсовых переключающих элемента, соответствующих фазам U, V и W и соединенных с положительным полюсом внешнего источника 131 питания, и три минусовых переключающих элемента, соответствующих фазам U, V и W и соединенных с отрицательным полюсом внешнего источника 131 питания. Кроме того, к инверторной схеме 130 подсоединена схема 132 управления (контроллер 132), предназначенная для переключения переключающего элемента 130а между включенным и выключенным состояниями.
Данная схема 132 управления является хорошо известным компьютером с центральным процессором, оперативной и постоянной памятью и т.п. Приводное устройство 133, в свою очередь, имеет схему 134 выработки широтно-модулированного сигнала, и сигнал с упомянутой схемы 134 выработки широтно-модулированного сигнала подается на вход схемы 132 управления. Упомянутая схема 132 управления выдает ведущий сигнал для управления тремя минусовыми переключающими элементами, и этот широтно-модулированный сигнал накладывается на упомянутый ведущий сигнал. То есть три минусовых переключающих элемента управляются широтно-модулированным сигналом таким образом, что они поочередно включаются в каждый момент времени подачи питания. И посредством регулирования отношения, при котором упомянутые три минусовых переключающих элемента по отдельности включены, т.е. регулирования продолжительности включения, может регулироваться ток, который должен подаваться на каждую из обмоток 121а, 121b и 121с. Кроме того, схема 132 управления сохраняет в памяти данные, программу и т.д. для осуществления регулирования во время запуска бесщеточного электродвигателя 119. Временем запуска бесщеточного электродвигателя 119 является время начала вращения бесщеточного электродвигателя из состояния покоя.
Кроме того, блок 135 обнаружения индуцированного напряжения подсоединен к свободному концу каждой обмотки 121а, 121b и 121с. Упомянутый блок 135 обнаружения индуцированного напряжения представляет собой датчик, который обнаруживает индуцированное напряжение, возникающее в каждой обмотке 121а, 121b и 121с в связи с вращением ротора 122, и сигнал обнаружения с блока 135 обнаружения индуцированного напряжения поступает на вход схемы 132 управления. Упомянутая схема 132 управления определяет положение вращения ротора 122 (фазу в направлении вращения) на основе сигнала обнаружения, поступающего с блока 135 обнаружения индуцированного напряжения.
Кроме того, бесщеточный электродвигатель 119 в данном варианте выполнения осуществляет управление переключением между включенным и выключенным состояниями переключающего элемента 130а для изменения на обратное направления подачи питания на обмотки 121а, 121b и 121с, обеспечивая возможность вращения ротора 122 вперед и назад. Когда переключающий элемент 130а находится во включенном состоянии, внешний источник 131 питания соединен с обмотками 121а, 121b и 121с, а когда переключающий элемент 130а находится в выключенном состоянии, внешний источник 131 питания отсоединен от обмоток 121а, 121b и 121с.
Кроме того, внутри рамы 124 устанавливается датчик 136 выходного вала, определяющий по меньшей мере либо частоту вращения, либо абсолютное положение выходного вала 126. Абсолютное положение означает угол поворота выходного вала 126 относительно опорного положения. Упомянутое опорное положение может быть любым положением в диапазоне 360°. Сигнал обнаружения от этого датчика 136 выходного вала поступает на вход схемы 132 управления. Кроме того, на плате управления устанавливается ИС 139 с датчиком Холла. Упомянутая ИС 139 с датчиком Холла крепится таким образом, чтобы бесконтактно взаимодействовать с магнитом 138 датчика. При чередовании магнитных полюсов магнита 138 датчика в результате вращения ротора 122, ИС 139 с датчиком Холла осуществляет операцию переключения, вырабатывая переключающий сигнал (сигнал включения/выключения). Схема управления 132 может определять частоту вращения (скорость вращения) ротора 122 на основе переключающего сигнала, поступающего от ИС 139 с датчиком Холла. Кроме того, в салоне автомобиля ПО устанавливается переключатель 137 стеклоочистителя, и рабочий сигнал от переключателя 137 стеклоочистителя поступает на вход схемы 132 управления.
В стеклоочистителе 112 переключатель 137 приводится в действие водителем с учетом условий, таких как интенсивность выпадения дождя, снега и т.д., тем самым обеспечивая переключение скорости перемещения рычагов 114 и 116 стеклоочистителя при чистке ветрового стекла. Например, если интенсивность выпадения дождя или снега мала, водитель может с помощью переключателя 137 стеклоочистителя выбрать низкоскоростной режим очистки, чтобы побудить рычаги 114 и 116 стеклоочистителя работать с заданной медленной скоростью. Напротив, если интенсивность выпадения дождя или снега велика, водитель может с помощью переключателя 137 стеклоочистителя выбрать высокоскоростной режим очистки, чтобы побудить рычаги 114 и 116 стеклоочистителя работать с более высокой скоростью. Исходя из этого типовые шаблоны, данные, арифметические выражения и т.п., относящиеся к низкоскоростному или высокоскоростному режиму работы, заранее сохраняются в схеме 132 управления для управления переключающим элементом 130а.
Ниже описывается управление бесщеточным электродвигателем 119 в данном варианте осуществления изобретения. Когда с помощью переключателя 137 стеклоочистителя выбирается низкоскоростной режим очистки, сигнал обнаружения от блока 135 обнаружения индуцированного напряжения поступает на вход схемы 132 управления. На основе сигнала обнаружения с блока 135 обнаружения индуцированного напряжения схема управления 132 определяет положение вращения (угол в направлении вращения) ротора 122 и осуществляет управление подачей питания исходя из положения вращения ротора 122. То есть плюсовые переключающие элементы последовательно включаются на электрический угол 120°, а минусовые переключающие элементы с фазой, отличающейся от фазы плюсовых переключающих элементов, последовательно включаются на электрический угол 120°, тем самым переключая подачу питания на обмотки 121а, 121b и 121с соответствующих фаз для коммутации фазного тока.
При повторении вышеописанного управления статором 121 создается вращающееся магнитное поле для вращения ротора 122. При этом бесщеточному электродвигателю 119 свойственно увеличение частоты вращения с увеличением силы тока. Кроме того, бесщеточному электродвигателю 119 свойственно уменьшение крутящего момента по мере увеличения частоты вращения. Если выбран низкоскоростной режим очистки, управление продолжительностью включения осуществляется без регулирования частоты вращения при помощи ослабления поля, вследствие чего текущая частота вращения ротора 122 поддерживается вблизи требуемой частоты вращения.
С другой стороны, если выбран высокоскоростной режим очистки, регулирование частоты вращения путем ослабления поля осуществляется без изменения тока, поступающего в обмотки 121а, 121b и 121с. При регулировании частоты вращения путем ослабления поля момент времени подачи питания на каждую обмотку 121а, 121b и 121с смещается вперед на угол 30° по отношению к низкоскоростному режиму очистки. Термин "регулирование ослабления поля" означает максимальное ослабление магнитного поля, создаваемого посредством подачи тока в обмотки 121а, 121b и 121с. Когда осуществляется упомянутое регулирование ослабления поля, противоэлектродвижущая сила в обмотках 121а, 121b и 121с уменьшается, и частота вращения ротора 122 увеличивается.
На фиг. 12 показана диаграмма характеристик бесщеточного электродвигателя 119. На фиг. 12 по вертикальной оси откладывается частота вращения бесщеточного электродвигателя 119, а по горизонтальной оси - его крутящий момент. Кроме того, пунктирной линией на фиг. 12 показан пример низкоскоростной характеристики, соответствующей низкоскоростному режиму очистки, а жирной линией - пример высокоскоростной характеристики, соответствующей высокоскоростному режиму очистки.
В бесщеточном электродвигателе 119 данного варианта осуществления изобретения для определения его категории имеется установочная характеристика, обозначенная, например, жирной линией, позволяющая получить частоту вращения и крутящий момент, соответствующие низкоскоростной характеристике на фиг. 12. Вследствие этого если с помощью переключателя 137 стеклоочистителя выбран низкоскоростной режим очистки, то требуемые частота вращения и крутящий момент могут быть получены в пределах области значений, равных или лежащих ниже установочной характеристики.
Напротив, если с помощью переключателя 137 стеклоочистителя выбран высокоскоростной режим очистки, и частота вращения и крутящий момент располагаются в области значений над установочной характеристикой, схема 132 управления осуществляет регулирование частоты вращения путем ослабления поля, тем самым позволяя получить частоту вращения и крутящий момент, располагающиеся выше установочной характеристики. При этом характеристика бесщеточного электродвигателя 119, казалось бы, становится эквивалентной характеристике, обозначенной на фиг. 12 штрихпунктирной линией. А крутящий момент может быть увеличен путем увеличения частоты вращения бесщеточного электродвигателя 119 без изменения силы тока, что означает, что моментный коэффициент относительно увеличивается. Другими словами, бесщеточный электродвигатель 119 может создавать максимальный крутящий момент при меньшем потреблении энергии, тем самым повышая кпд электродвигателя.
При этом в общем, в автомобильных стеклоочистителях низкоскоростной режим очистки используется чаще, чем высокоскоростной режим. По этой причине, если в стеклоочистителе 112 используется бесщеточный электродвигатель 119 данного варианта выполнения, эффект снижения потребления энергии велик, если выбран низкоскоростной режим очистки. В бесщеточном электродвигателе данного варианта выполнения нет необходимости определять конструктивную категорию бесщеточного электродвигателя 119 исходя из высокоскоростного режима очистки, и бесщеточный электродвигатель 119 может быть максимально уменьшен в размерах.
Кроме того, в бесщеточном электродвигателе 119 данного варианта выполнения, если осуществляется регулирование ослабления поля, положение вращения ротора 122 может быть определено на основе сигнала обнаружения, поступающего от блока 135 обнаружения индуцированного напряжения. Кроме того, помимо сигнала обнаружения, поступающего от блока 135 обнаружения индуцированного напряжения, положение вращения ротора 122 может быть определено исходя из сигнала обнаружения, поступающего от датчика 136 выходного вала, и передаточного числа механизма 127 уменьшения частоты вращения. Как только что было описано, в бесщеточном электродвигателе 119 данного варианта выполнения положение вращения ротора 122 может быть определено с помощью блока 135 обнаружения индуцированного напряжения и с помощью датчика 36 выходного вала, если он имеется. Нет необходимости устанавливать специальный датчик для определения положения ротора 122, т.е. бесщеточный электродвигатель данного варианта выполнения имеет бездатчиковую конструкцию. Вследствие этого бесщеточный электродвигатель данного варианта выполнения может иметь меньше деталей и меньшую стоимость изготовления.
При этом в бесщеточном электродвигателе 119 данного варианта выполнения частота вращения и крутящий момент, соответствующие высокоскоростной характеристике, могут быть получены посредством осуществления регулирования ослабления поля, и бесщеточный электродвигатель 119 оснащен механизмом 127 уменьшения частоты вращения. Вследствие этого в бесщеточном электродвигателе 119 передаточное число механизма 127 уменьшения частоты вращения может быть установлено таким, что может быть обеспечена характеристика, т.е. частота вращения и крутящий момент, подходящие для условий эксплуатации рычагов 114 и 116 стеклоочистителя 112. Упомянутое передаточное отношение механизма 127 уменьшения частоты вращения является значением, получаемым путем деления частоты вращения выходного вала 126 на частоту вращения ротора 122, и частота вращения выходного вала 126 уменьшается при увеличении передаточного отношения механизма 127 уменьшения частоты вращения.
При этом в бесщеточном электродвигателе 119 данного варианта выполнения регулировка угла опережения во время вращения бесщеточного электродвигателя 119 вперед и назад может быть оптимизирована на основе определения положения вращения ротора 122. При этом ввиду отсутствия в бесщеточном электродвигателе 119 данного варианта выполнения щеток, коллектора и т.д., отсутствует момент трения из-за скольжения щеток по коллектору, что предотвращает уменьшение кпд электродвигателя. Кроме того, в бесщеточном электродвигателе 119 данного варианта выполнения предотвращаются шумы, возникающие из-за работы щеток.
При этом бесщеточный электродвигатель 119 данного варианта выполнения имеет конструкцию, в которой как плата 129 управления, так и механизм 127 уменьшения частоты вращения размещаются внутри полости, ограниченной рамой 24 и защитной крышкой 28, т.е., с механической и электрической точек зрения, внутри несущей конструкции. Вследствие этого весь бесщеточный электродвигатель 119 может быть выполнен компактным, и могут быть улучшены возможности по его размещению в автомобиле.
При этом в бесщеточном электродвигателе 119 данного варианта выполнения при осуществлении регулирования ослабления поля схема 132 управления имеет функцию управления определением частоты вращения ротора 122 на основе сигнала включения/выключения от ИС 139 с датчиком Холла и регулирования частоты вращения ротора 122 посредством опережения момента времени подачи питания на обмотки 121а, 121b и 121с на электрический угол 30°.
Далее описывается отношение между рассмотренной в данном варианте выполнения конструкцией и конструкцией, предлагаемой в настоящем изобретении. Приводное устройство 133, имеющее схему 132 управления, соответствует первому блоку управления частотой вращения, второму блоку управления направлением вращения, блоку определения положения вращения и блоку определения направления вращения в настоящем изобретении; рама 124 и защитная крышка 128 соответствуют корпусу в настоящем изобретении; ветровое стекло 111 соответствует ветровому стеклу в настоящем изобретении, рычаги 114 и 116 стеклоочистителя соответствуют исполнительному органу в настоящем изобретении; переключающий элемент 130а соответствует переключателю в настоящем изобретении, а ИС 39 с датчиком Холла соответствует датчику частоты вращения в настоящем изобретении. Более того, характеристики, представленные на фиг. 12 частотой вращения и крутящим моментом, соответствуют характеристикам предлагаемого в изобретении бесщеточного электродвигателя.
Само собой разумеется, что настоящее изобретение не ограничивается вышеописанным вариантом осуществления и может быть различным образом модифицировано, не отклоняясь от существа изобретения. Например, стеклоочиститель 112 не ограничивается стеклоочистителем для очистки лобового ветрового стекла 111, но может использоваться и для очистки заднего стекла. Кроме того, хотя на фиг. 8 рычаги 114 и 116 стеклоочистителя соединяются с выходным валом 126 посредством механизма 120 кинематической передачи, рычаги стеклоочистителя могут соединяться непосредственно с выходным валом. Кроме того, хотя на фиг. 8 рычаги 114 и 116 стеклоочистителя 112 приводятся в действие одним бесщеточным электродвигателем 119, оба рычага стеклоочистителя могут соответственно приводиться в действие отдельными бесщеточными электродвигателями. При этом бесщеточный электродвигатель такого варианта осуществления изобретения может быть двигателем с внутренним постоянным магнитом, имеющим конструкцию с заглубленными в стальной сердечник постоянными магнитами. При этом количество режимов очистки, выбираемых с помощью переключателя стеклоочистителя, не ограничивается двумя режимами, т.е. низкоскоростным и высокоскоростным режимами, но может составлять три и более режима. Кроме того, количество обмоток и количество постоянных магнитов по желанию может изменяться.
Кроме того, предлагаемый в настоящем изобретении бесщеточный электродвигатель может представлять собой бесщеточный электродвигатель с внутренним ротором, располагающимся внутри статора, или бесщеточный электродвигатель с наружным ротором, располагающимся снаружи статора. При этом бесщеточный электродвигатель такого варианта выполнения может использоваться в автомобильных устройствах обеспечения удобства и комфорта, например в автоматической сдвижной двери, в люке в крыше автомобиля или в автоматическом стеклоподъемнике в качестве источника приводного усилия для приведения в действие исполнительного органа, такого как дверь, люк или ветровое стекло.
Далее по тексту подробно рассматривается еще один вариант осуществления настоящего изобретения со ссылкой на прилагаемые к описанию чертежи. Показанный на фиг. 13 автомобиль 210 имеет ветровое стекло 211. Кроме того, упомянутый автомобиль 210 имеет стеклоочиститель 212 для очистки ветрового стекла. Стеклоочиститель 212 имеет рычаг 214, совершающий возвратно-поступательное движение на поворотной оси 213, и рычаг 216, совершающий возвратно-поступательное движение на поворотной оси 215. Щетка 217 стеклоочистителя устанавливается на свободном конце рычага 214 стеклоочистителя, а щетка 218 - на свободном конце рычага 216 стеклоочистителя. Упомянутый стеклоочиститель 212, кроме того, имеет бесщеточный электродвигатель 219 в качестве источника приводного усилия для приведения в действие рычагов 214 и 216. В данном варианте осуществления изобретения мощность привода бесщеточного электродвигателя 219 передается щеткам 214 и 216 посредством механизма 220 кинематической передачи, состоящего из таких частей, как рычаги и тяги.
Бесщеточный электродвигатель 219 имеет конструкцию, показанную на фиг. 14, 15 и 16. В данном варианте осуществления изобретения в качестве бесщеточного электродвигателя 219 используется трехфазный четырехполюсный бесщеточный электродвигатель 219. Бесщеточный электродвигатель 219 имеет статор 221 и ротор 222. Бесщеточный электродвигатель 219, кроме того, имеет цилиндрический корпус 223 с закрытым концом, а имеющийся статор 221 крепится к внутренней окружности корпуса 223. Как показано на фиг. 16, статор 221 имеет обмоточные провода, а именно обмотки 221a, 221b и 221с, точнее говоря, фазы U, V и W. При этом три обмотки якоря соединяются друг с другом таким образом, чтобы образовать соединение звездой, т.е. одни концы трехфазных обмоток якоря 221а соединяются в нейтральной точке. Как показано на фиг. 10, внутри статора 121 располагается ротор 122. Кроме того, данный бесщеточный электродвигатель 219 является бесщеточным электродвигателем биполярного типа, в котором каждая обмотка якоря выступает в роли как положительного, так и отрицательного полюса. Ротор 222 располагается внутри статора 221 и имеет вал 122а и четырехполюсные постоянные магниты 222b, установленные на валу 122а. Внутри корпуса 223 установлено несколько непоказанных на чертеже подшипников, и на упомянутые подшипники опирается с возможностью вращения вал 222 ротора.
Кроме того, бесщеточный электродвигатель 219 имеет полую раму 224, и рама 224 и корпус 223 скрепляются вместе с помощью непоказанного на чертеже крепящего элемента. По существу половина длины вала 222а ротора располагается внутри корпуса 223, а остающаяся часть располагается внутри рамы 224. На наружной окружности упомянутой остающейся части вала 222а ротора, располагающейся внутри рамы 224, выполнена червячная шестерня 222с. Внутри рамы 224 установлено червячное колесо 225. На наружной окружности этого червячного колеса 225 выполнена зубчатка 225а, и упомянутая зубчатка 225а и червячная шестерня 222с входят в зацепление друг с другом. Кроме того, на остающейся части вала 222а ротора, располагающейся внутри рамы 224, устанавливается магнит 238 датчика. Упомянутый магнит 238 датчика вращается вместе с валом 222а ротора. Магнит 238 датчика намагничен таким образом, что его N и S полюса чередуются по длине окружности вала 222а ротора.
Кроме того, червячное колесо 225 выполнено с возможностью вращения вместе с выходным валом 226. В данном варианте осуществления изобретения червячная шестерня 222с и зубчатка 225а совместно образуют механизм 227 уменьшения частоты вращения. Передаточное число этого механизма 227 уменьшения частоты вращения представляет собой средство уменьшения частоты вращения выходного вала 226 (частота вращения на выходе) относительно частоты вращения ротора 222 (частота вращения на входе) при передаче выходному валу 226 мощности привода ротора 222. Частота вращения ротора 222 является частотой вращения на входе, а частота вращения выходного вала является частотой вращения на выходе. Кроме того, как показано на фиг. 14, верхняя часть рамы 224 снабжена непоказанным на чертеже отверстием для вала, и в это отверстие вставляется выходной вал 226. Червячное колесо 225 закреплено на одном конце выходного вала 226, а другой конец выходного вала 226 выходит наружу рамы 224 и соединяется с механизмом 220 кинематической передачи.
На стороне рамы 224, противоположной отверстию для вала, выполнен проем 224а. Данный проем 224а предназначен для установки червячного колеса 225 и т.п. внутрь рамы 224. Кроме того, к раме 224 крепится защитная крышка 228, закрывающая проем 224а. Защитная крышка 228 имеет форму подноса, и в полость, ограниченную защитной крышкой 228 и рамой 224, устанавливается плата 229 управления. Один из примеров, когда плата 229 управления крепится к защитной крышке 228, показан на фиг. 14.
Как показано на фиг. 16, на упомянутой плате 229 управления находится блок управления для управления бесщеточным электродвигателем 219, т.е. приводное устройство 233, выступающее в роли контроллера. Данное приводное устройство 233 содержит инверторную схему 230 для регулирования подачи питания на каждую из обмоток 221а, 221b и 221с. Упомянутая инверторная схема 230 соединяется с непоказанным на чертеже терминалом. Рама 224 снабжена разъемом, и при вставлении в разъем гнездовой части соединителя электрического провода, соединенного с внешним источником 231 питания, внешний источник 231 питания и инверторная схема 230 соединяются друг с другом. Внешний источник 131 питания представляет собой установленную на автомобиле 210 аккумуляторную батарею, конденсатор или т.п.
Кроме того, инверторная схема 230 оснащается переключающим элементом 230а для соединения обмоток 221а, 221b и 221с с внешним источником 231 питания и их отсоединения от внешнего источника 231 питания. Данный переключающий элемент 230а представляет собой, к примеру, полупроводниковое устройство, такое как полевой транзистор. Точнее говоря, переключающий элемент 230а включает в себя три плюсовых переключающих элемента, соответствующих фазам U, V и W и соединенных с положительным полюсом внешнего источника 231 питания, и три минусовых переключающих элемента, соответствующих фазам U, V и W и соединенных с отрицательным полюсом внешнего источника 231 питания. То есть всего имеется шесть переключающих элементов. Когда переключающий элемент 230а замкнут, т.е. включен, ток от внешнего источника 231 питания поступает на обмотки 221а, 221b и 221с. Напротив, когда переключающий элемент 230а разомкнут, т.е. выключен, ток от внешнего источника 231 питания не поступает на обмотки 221а, 221b и 221с. Кроме того, к инверторной схеме 230 подсоединена схема 232 управления, предназначенная для переключения переключающего элемента между включенным и выключенным состояниями.
Данная схема 232 управления является хорошо известным компьютером с центральным процессором, оперативной и постоянной памятью и т.п. Приводное устройство 233, в свою очередь, содержит схему 234 выработки широтно-модулированного сигнала, и сигнал с этой схемы 234 выработки широтно-модулированного сигнала подается на вход схемы 232 управления. Упомянутая схема 232 управления выдает ведущий сигнал для управления тремя минусовыми переключающими элементами, и широтно-модулированный сигнал накладывается на этот ведущий сигнал. То есть три минусовых переключающих элемента управляются широтно-модулированным сигналом таким образом, что поочередно включаются в каждый момент времени подачи питания. И посредством регулирования отношения, при котором упомянутые три минусовых переключающих элемента по отдельности включены, т.е. регулирования продолжительности включения, может регулироваться ток, который должен подаваться на каждую из обмоток 221а, 221b и 221с. То есть период времени подачи питания, в течение которого электрическая энергия поступает на обмотки 221а, 221b и 221с, может увеличиваться и уменьшаться от 0 до 100% относительно полного периода подачи питания. Кроме того, схема 232 управления сохраняет в памяти данные, программу и т.д. для осуществления регулирования во время запуска бесщеточного электродвигателя 219. Временем запуска бесщеточного электродвигателя 219 является время начала вращения бесщеточного электродвигателя 219 из состояния покоя.
При этом блок 235 обнаружения индуцированного напряжения подсоединен к свободному концу каждой обмотки 221а, 221b и 221с. Упомянутый блок 235 обнаружения индуцированного напряжения представляет собой датчик, который обнаруживает индуцированное напряжение, возникающее в каждой обмотке 221а, 221b и 221с в связи с вращением ротора 222, и сигнал обнаружения с блока 235 обнаружения индуцированного напряжения поступает на вход схемы 232 управления. Упомянутая схема 232 управления определяет положение вращения ротора 222, т.е. фазу в направлении вращения, на основе сигнала обнаружения, поступающего с блока 235 обнаружения индуцированного напряжения.
Кроме того, на плате управления 229 находится ИС 239 с датчиком Холла. ИС 239 с датчиком Холла установлена таким образом, чтобы бесконтактно взаимодействовать с магнитом 239 датчика. При вращении вала 222а ротора ИС 239 с датчиком Холла осуществляет операцию переключения по мере чередования магнитных полюсов магнита 238 датчика, генерируя переключающий сигнал, т.е. сигнал включения/выключения. Следует отметить, что по направлению вращения вала 222 ротора могут устанавливаться несколько ИС 239 с датчиком Холла, к примеру три. На основе переключающего сигнала от ИС 239 с датчиком Холла схема 232 управления определяет частоту вращения и угол вращения вала 222 ротора. Помимо этого имеется датчик 236 выходного вала, который обнаруживает угол вращения и частоту вращения выходного вала 226. Сигнал обнаружения с датчика 236 выходного вала поступает на вход схемы 232 управления. Кроме того, внутри автомобиля 210 имеется переключатель 237 стеклоочистителя, и конструкция выполнена таким образом, что рабочий сигнал с переключателя 237 поступает на вход схемы 232 управления. Кроме того, имеется датчик 240 скорости автомобиля, и сигнал с датчика 240 скорости автомобиля поступает на вход схемы 232 управления. Датчик 240 скорости автомобиля является датчиком определения скорости перемещения автомобиля 210.
Ниже описывается управление бесщеточным электродвигателем 219 данного варианта выполнения. На основе сигнала обнаружения, поступающего от блока 235 обнаружения индуцированного напряжения, схема 232 управления определяет направление и положение вращения, т.е. угол в направлении вращения вала 222а ротора, и осуществляет управление подачей питания исходя из положения вращения вала 222а ротора. То есть плюсовые переключающие элементы последовательно включаются на заданный электрический угол, а минусовые переключающие элементы с фазой, отличающейся от фазы плюсовых переключающих элементов, последовательно включаются и выключаются на заданный электрический угол, тем самым переключая подачу питания на обмотки 221а, 221b и 221с соответствующих фаз для коммутации фазного тока. При повторении вышеописанного регулирования статором 221 создается вращающееся магнитное поле для вращения ротора 222.
Кроме того, бесщеточный электродвигатель данного варианта выполнения осуществляет управление переключением между включенным и выключенным состояниями переключающего элемента 230а для изменения на обратное направления подачи питания на обмотки 221а, 221b и 221с, тем самым позволяя валу 222а ротора вращаться в положительном направлении, останавливаться и вращаться в обратном направлении. Рычаги 214 и 216 стеклоочистителя совершают возвратно-поступательное движение под воздействием мощности привода вала 222а ротора в пределах заданного угла, и ветровое стекло 211 очищается щетками 217 и 218.
Кроме того, при регулировке частоты вращения вала 222 ротора бесщеточный электродвигатель 219 в данном варианте выполнения может осуществлять регулирование путем ослабления поля. Регулирование ослабления поля представляет собой максимальное ослабление магнитного поля, создаваемого посредством подачи тока в обмотки 221а, 221b и 221с. Как особо описывается ниже, регулирование частоты вращения путем ослабления поля - это регулирование опережения момента времени подачи питания на обмотки 221а, 221b и 221 с на 30° (опережающая фаза) по сравнению с нормальным моментом времени подачи питания. То есть управление относится к опережающей фазе. Когда осуществляется регулирование ослабления поля, противоэлектродвижущая сила в обмотках 221а, 221b и 221с снижается, а частота вращения вала 222 ротора повышается.
Кроме того, при управлении выходными параметрами, т.е. частотой вращения и крутящим моментом вала 222а ротора, бесщеточный электродвигатель 219 данного варианта выполнения может переключаться между первым и вторым режимами управления. Примером условия переключения между первым и вторым режимами управления может быть скорость перемещения автомобиля 210. Схема 232 управления заранее сохраняет в своей памяти опорную скорость автомобиля, служащую порогом для переключения между первым и вторым режимами управления. И если реальная скорость, определенная по сигналу от датчика 240 скорости автомобиля, равна или ниже опорной скорости автомобиля, осуществляется первый режим управления. Если реальная скорость, определенная по сигналу от датчика 240 скорости автомобиля, превышает опорную скорость автомобиля, осуществляется второй режим управления.
Примеры первого и второго режимов управления описываются со ссылкой на фиг. 17. Показанные на фиг. 17 углы от 0 до 360° являются электрическими углами, каждый представляет период подачи питания в одном цикле электрического сигнала. Положительные углы представляют подачу питания с положительного полюса, отрицательные - с отрицательного полюса. На фиг. 17А показан пример первого режима управления. В фазе U подача питания с положительного полюса начинается при угле 30°, причем в качестве опорного выбран угол 0°, продолжается на протяжении электрического угла 120°, и затем подача питания с положительного полюса прекращается. Далее, через заданный угловой интервал с момента прекращения подачи питания с положительного полюса начинается подача питания с отрицательного полюса, она продолжается на протяжении электрического угла 120° и затем прекращается.
С другой стороны, в фазе V подача питания с положительного полюса начинается с момента прекращения подачи питания с положительного полюса в фазе U. После подачи питания на протяжении электрического угла 120° подача питания прекращается. При этом в фазе V подача питания с отрицательного полюса начинается с момента, когда в фазе U прекращается подача питания с отрицательного полюса. После подачи питания с отрицательного полюса на протяжении электрического угла 120° подача питания с отрицательного полюса прекращается. При этом в фазе W подача питания с положительного полюса начинается с момента, когда прекращается подача питания с положительного полюса в фазе V. После подачи питания с положительного полюса на протяжении электрического угла 120°, подача питания с положительного полюса прекращается. При этом в фазе W подача питания с отрицательного полюса начинается с момента, когда прекращается подача питания с отрицательного полюса в фазе V. После подачи питания с отрицательного полюса на протяжении электрического угла 120° подача питания с отрицательного полюса прекращается. По сути, в первом режиме управления продолжительности подачи питания с положительного и с отрицательного полюсов одинаковы, и углы подачи питания в обоих случаях равны 120°.
Далее описание дается со ссылкой на чертеж фиг. 17B, иллюстрирующий пример второго варианта управления. В фазе U подача питания с положительного полюса начинается при угле 0°. После подачи питания с положительного полюса на протяжении электрического угла 120+α градусов питание с положительного полюса прекращается. При этом подача питания с отрицательного полюса начинается после прекращения подачи питания с положительного полюса. После подачи питания с отрицательного полюса на протяжении электрического угла 120+α градусов питание с отрицательного полюса прекращается.
В фазе V подача питания с положительного полюса начинается, хотя осуществляется подача питания с положительного полюса в фазе U. При этом после подачи питания с положительного полюса на протяжении электрического угла 120+α градусов подача питания с положительного полюса прекращается. При этом подача питания с отрицательного полюса начинается после прекращения подачи питания с положительного полюса, хотя продолжается подача питания с отрицательного полюса в фазе U. После подачи питания с отрицательного полюса на протяжении электрического угла 120+α градусов подача питания с отрицательного полюса прекращается.
В фазе W подача питания с положительного полюса начинается во время осуществления подачи питания с отрицательного полюса в фазе U и во время осуществления подачи питания с положительного полюса в фазе V. При этом после подачи питания с положительного полюса на протяжении электрического угла 120+α градусов подача питания с положительного полюса прекращается. Далее, после прекращения подачи питания с положительного полюса начинается подача питания с отрицательного полюса, в то время как продолжается подача питания с положительного полюса в фазе U и в то время как продолжается подача питания с отрицательного полюса в фазе V. После продолжения подачи питания с отрицательного полюса на протяжении электрического угла 120+α градусов подача питания с отрицательного полюса прекращается. На фиг. 17B каждый из участков, где подачи питания с положительного полюса в фазе U и в фазе V перекрываются, где подачи питания с положительного полюса в фазе V и в фазе W перекрываются и где подачи питания с положительного полюса в фазе W и в фазе V перекрываются, равен углу α. То же самое относится к подаче питания с отрицательного полюса.
Еще один пример второго режима управления описывается ниже со ссылкой на фиг. 17C. В фазе U подача питания с положительного полюса начинается с электрического угла, превышающего 0° и меньшего чем 30°. После подачи питания с положительного полюса на протяжении электрического угла 120+α градусов подача питания с положительного полюса прекращается. Следует отметить, что управление подачей питания с отрицательного полюса в фазе U, управление подачей питания с положительного полюса и с отрицательного полюса в фазе V и управление подачей питания с положительного полюса и с отрицательного полюса в фазе W аналогично тому, что представлено на фиг. 17B. При этом угол подачи питания 120+α градусов означает, что угол подачи питания превышает 120 градусов. В данном варианте осуществления изобретения угол подачи питания бесщеточного электродвигателя 219 регулируется в диапазоне от 120 или более градусов до 180 или менее градусов.
По существу угол подачи питания в примерах второго режима управления шире, чем угол подачи питания в примере первого режима управления. То есть первый и второй режимы управления имеют отличающиеся углы подачи питания. На фиг. 17B каждый из участков, где периоды подачи питания с положительного полюса в фазе U и в фазе V перекрываются друг с другом, где периоды подачи питания с положительного полюса в фазе V и в фазе W перекрываются друг с другом и где периоды подачи питания с положительного полюса в фазе W и в фазе V перекрываются друг с другом, равен углу α. То же самое относится к подаче питания с отрицательного полюса.
И вместе с первым или вторым режимом управления с целью регулирования частоты вращения вала 222а ротора осуществляется описанное выше управление продолжительностью включения. На фиг. 18 приведена диаграмма, показывающая характеристики бесщеточного электродвигателя 219. Независимая характеристика бесщеточного электродвигателя 219 показана жирной линией. А кажущаяся характеристика при регулировании угла подачи питания бесщеточного электродвигателя 219 показана штрихпунктирной линией. Независимая характеристика представляет собой характеристику, удовлетворяющую целевому выходу, когда реальная скорость автомобиля 210 равна или ниже опорной скорости автомобиля, т.е. низкоскоростную характеристику. Кажущаяся характеристика представляет собой характеристику, удовлетворяющую целевому выходу, когда реальная скорость автомобиля 210 превышает опорную скорость автомобиля, т.е. высокоскоростную характеристику. Целевой выход представлен частотой вращения и крутящим моментом вала 222а ротора. Условие для определения целевого выхода включает в себя рабочий сигнал от переключателя 237 стеклоочистителя, скорость перемещения автомобиля 210, рабочие положения рычагов 214 и 216 стеклоочистителя и т.д.
В бесщеточном электродвигателе 219 данного варианта выполнения, если целевой выход имеет характеристику, идентичную или расположенную ниже независимой характеристики, осуществляется первый режим управления, и регулируется продолжительность включения, вследствие чего частота вращения вала 222а ротора уменьшается и получается низкоскоростная характеристика. Напротив, если целевой выход имеет характеристику, расположенную выше независимой характеристики, осуществляется второй режим управления с целью увеличения частоты вращения вала 222а ротора, и регулируется продолжительность включения, вследствие чего получается высокоскоростная характеристика. Таким образом, конструктивная категория бесщеточного электродвигателя 219 может быть определена на основе независимой характеристики, и бесщеточный электродвигатель 219 может быть максимально уменьшен в размерах. При расширении угла подачи питания без изменения силы тока бесщеточного электродвигателя 219 частота вращения вала 222а ротора увеличивается для увеличения крутящего момента, что означает, что моментный коэффициент относительно увеличивается. Другими словами, бесщеточный электродвигатель 219 данного варианта выполнения может создавать максимальный крутящий момент при меньшем потреблении энергии, вследствие чего кпд электродвигателя повышается. При этом если выход бесщеточного электродвигателя 219 предполагается постоянным, потребление мощности может оставаться низким.
Более того, категория бесщеточного электродвигателя 219 может быть максимально низкой, и это означает, что провод для каждой обмотки 221а, 221b и 221с может быть выбран максимально тонким. В результате количество витков каждой обмотки 221а, 221b и 221с, наматываемой вокруг статора 221, увеличивается, и электрическое сопротивление бесщеточного электродвигателя 219 относительно увеличивается. Так, например, ток, протекающий через переключающий элемент 230а, когда приводное устройство 233 неисправно, т.е. допустимый ток может быть относительно уменьшен. Ввиду относительного уменьшения допустимого ток через переключающий элемент 230а возможно уменьшение размеров приводного устройства 233. Таким образом, все это способствует уменьшению размеров бесщеточного электродвигателя 219 и дает преимущество улучшенного размещения бесщеточного электродвигателя 219 в подкапотном пространстве автомобиля 210.
Далее со ссылкой на фиг. 19 описывается отношение между характеристиками и углом подачи питания бесщеточного электродвигателя 219. Характеристики бесщеточного электродвигателя 219 представлены частотой вращения и крутящим моментом. На фиг. 19 показаны отношения, соответствующие углам 120, 135, 150 и 165 градусов, как углам подачи питания. Как видно из фиг. 19, бесщеточный электродвигатель 219 имеет характеристики, при которых частота вращения увеличивается с увеличением угла подачи питания при условии, что крутящий момент остается постоянным.
Затем последовательно описывается другой пример условия для осуществления первого и второго режимов управления. Например, как показано на фиг. 20, первый и второй режимы регулирования могут осуществляться исходя из рабочего угла вала 222а ротора, получаемого из сигнала обнаружения от ИС 239 с датчиком Холла. На фиг. 20 по вертикальной оси откладывается частота вращения вала 222а ротора, а по горизонтальной оси - рабочий угол. Частота вращения вала 222а ротора обозначена жирной линией. Упомянутый рабочий угол представляет собой рабочий угол вала 222а ротора, соответствующий рабочим положениям рычагов 214 и 216 стеклоочистителя.
Как будет особо описано ниже, рабочий угол вала 222а ротора - это угол поворота, при котором показанные на фиг. 13 рычаги 214 и 216 стеклоочистителя действуют со своих исходных позиций, ближайших к бесщеточному электродвигателю 219, т.е. с заданных позиций. Максимальное значение рабочего угла вала 222а ротора соответствует позициям, где рычаги 214 и 216 стеклоочистителя меняют направление перемещения на обратное. То есть по мере удаления рабочих позиций рычагов 214 и 216 стеклоочистителя от бесщеточного электродвигателя 219, рабочий угол вала 222а ротора увеличивается. В данном случае когда рычаги 214 и 216 стеклоочистителя начинают двигаться из исходных позиций, частота вращения возрастает по мере увеличения рабочего угла вала 222а ротора. Между рабочим углом θ1 и рабочим углом θ2 частота вращения вала 222а ротора приблизительно постоянна. Далее, между рабочим углом θ2 и максимальным значением рабочего угла частота вращения вала 222а ротора постепенно снижается.
В отличие от этого, после прохождения рычагами 214 и 216 стеклоочистителя позиции реверсирования, частота вращения вала 222а ротора увеличивается по мере продвижения от максимального значения рабочего угла до рабочего угла θ2. Между рабочим углом θ2 и рабочим углом θ1 частота вращения вала 222а ротора приблизительно постоянна. Далее, между рабочим углом θ1 и исходной позицией частота вращения вала 222а ротора постепенно снижается.
Далее, при достижении рабочего угла θ1 может осуществляться первый режим управления, а при достижении рабочего угла θ2 может осуществляться второй режим управления. В данном случае рабочий угол θ2 больше рабочего угла θ1. Следует заметить, что при осуществлении первого и второго режимов управления исходя из рабочего угла рычагов 214 и 216 стеклоочистителя упомянутый рабочий угол рычагов 214 и 216 стеклоочистителя может быть получен из сигнала обнаружения, поступающего с датчика 236 выходного вала.
Далее со ссылкой на фиг. 21 описывается другой пример условия для осуществления первого и второго режимов регулирования. В данном случае первый и второй режимы управления могут осуществляться исходя из частоты вращения вала 222а ротора, получаемой из сигнала обнаружения, поступающего с ИС 239 с датчиком Холла. На фиг. 21 по вертикальной оси откладывается частота вращения, а по горизонтальной оси - время. Частота вращения показана жирной линией. Время, показанное на фиг. 21, представляет собой время, прошедшее с момента начала перемещения рычагов 214 и 216 из исходных позиции до достижения ими позиций реверсирования. И первый режим управления осуществляется, когда реальная частота вращения вала 222а ротора равна частоте вращения N1, а второй режим регулирования осуществляется, когда реальная частота вращения вала 222а ротора равна частоте вращения N2. В данном случае частота вращения N2 больше, чем частота вращения N1.
В качестве показанной на фиг. 21 частоты вращения может использоваться частота вращения выходного вала 226. То есть первый и второй режимы управления могут осуществляться исходя из частоты вращения выходного вала 226, получаемой из сигнала от датчика 236 выходного вала. При таком управлении переключение между первым и вторым режимами управления осуществляется на основе рабочей скорости рычагов 214 и 216 стеклоочистителя.
Следует заметить, что когда вал 222а ротора начинает вращаться из позиции, соответствующей исходным позициям рычагов 214 и 216 стеклоочистителя, частота вращения вала 222а ротора со временем возрастает. Далее частота вращения вала 222а ротора поддерживается постоянной в течение заданного периода времени и затем постепенно снижается. При возвращении рычагов 314 и 216 из их позиций реверсирования характер изменения частоты вращения противоположен вышеописанному.
Далее со ссылкой на фиг. 22 описывается другой пример условия для осуществления первого и второго режимов управления. В данном случае первый и второй режимы управления могут осуществляться исходя из частоты вращения вала 222а ротора, определяемой ИС 239 с датчиком Холла. На фиг. 22 по вертикальной оси откладывается частота вращения вала 222а ротора, а по горизонтальной оси - время. Время, показанное на фиг. 22, представляет собой то же время, что и показанное на фиг. 21. И первый режим управления осуществляется в момент времени t1, когда истекает заданное время с момента начала перемещения рычагов 214 и 216 стеклоочистителя с их исходных позиций. Далее, второй режим управления осуществляется в момент времени t2, когда истекает заданное время с момента времени t1. Следует заметить, что частота вращения выходного вала 226, определяемая датчиком 236 выходного вала, может использоваться в качестве частоты вращения на фиг. 22. То есть переключение между первым и вторым режимами управления может осуществляться исходя из рабочей скорости рычагов 214 и 216 стеклоочистителя.
Далее со ссылкой на фиг. 23 описывается еще один пример условия для осуществления первого и второго режимов управления. На фиг. 23А показан второй режим управления, соответствующий высокоскоростному режиму очистки, а на фиг. 23B - первый режим управления, соответствующий низкоскоростному режиму очистки. Здесь на фиг. 23А и 23B показаны режимы управления углом опережения и углом подачи питания, когда рабочий угол θ изменяется для обеих скоростей автомобиля. При этом величина изменения угла опережения и угла подачи питания относительно величины изменения рабочего угла θ может быть одинаковой для всех скоростей автомобиля или может изменяться для каждой скорости.
Далее со ссылкой на фиг. 24 описывается конструкция ротора 222 для использования в бесщеточном электродвигателе 219. Упомянутая конструкция ротора 222 бесщеточного электродвигателя 219 включает в себя конструкцию с внутренним постоянным магнитом и конструкцию с наружным постоянным магнитом. Конструкция с внутренним постоянным магнитом представляет собой конструкцию ротора 222 с постоянными магнитами 222b, заглубленными внутрь сердечника 222d ротора, как это показано на фиг. 24А. Конструкция с наружным постоянным магнитом представляет собой конструкцию ротора 222 с постоянными магнитами 222b, закрепленными на поверхности сердечника 222d ротора, как это показано на фиг. 24B. То есть в роторе 222, имеющем конструкцию с внутренними постоянными магнитами, сердечник 222d ротора, выполненный из магнитного материала на основе железа, размещается на поверхности ротора 222. Напротив, в роторе 222, имеющем конструкцию с наружным постоянным магнитом, на поверхности ротора 222 размещаются постоянные магниты 222b. И в виду того что магнитная проницаемость магнитного материала на основе железа выше примерно в 103 раз по сравнению с воздухом, магнитная проницаемость постоянных магнитов близка по величине к магнитной проницаемости воздуха. Вследствие этого ротор 222, имеющий конструкцию с наружным постоянным магнитом имеет меньшую индуктивность, чем индуктивность ротора 222, имеющего конструкцию с внутренним постоянным магнитом.
При управлении бесщеточным электродвигателем 219 данного варианта выполнения, в виду того что угол подачи питания больше, чем обычные 120 градусов, сектора отсутствия подачи питания в каждой фазе сужаются. Таким образом, для ускорения переключения тока желательно уменьшить сектор задержки тока, возникающей во время выключения переключающего элемента из-за индуктивности. Таким образом, для конструкции ротора 222 предпочтительна конструкция с наружным постоянным магнитом по сравнению с конструкцией с внутренним постоянным магнитом.
При этом даже когда ротор 222 имеет конструкцию с наружным постоянным магнитом, если в качестве постоянных магнитов 222b используются ферритовые магниты, осевая длина формируемого магнитного контура увеличивается. В целом индуктивность обмотки якоря пропорциональна осевой длине магнитного контура. Вследствие этого, если в качестве постоянных магнитов 222b используются ферритовые магниты, индуктивность обмоток 221а, 221b и 221с велика. Напротив, если ротор 222 имеет конструкцию с наружным постоянным магнитом, где в качестве постоянных магнитов используются редкоземельные магниты, изготовленные методом спекания, осевая длина формируемого магнитного контура уменьшается, и индуктивность обмотки может быть уменьшена. Однако в виду того что редкоземельные магниты, изготовленные методом спекания, включают в себя дорогие тяжелые редкоземельные элементы (Dy, Tb), бесщеточный электродвигатель 219 становится дорогим.
Таким образом, в качестве постоянных магнитов 222b предпочтительно использовать кольцевые магниты из редкоземельных магнитов со связками, способные обеспечить короткую осевую длину формируемого магнитного контура и не содержащие тяжелых редкоземельных элементов. В данном случае редкоземельные магниты со связками включают в себя магнит с неодимовыми связками и SmFeN связками. Более того, как магнит с неодимовыми связками, так и магнит с SmFeN связками могут быть изотропными и анизотропными.
Далее описываются количество постоянных магнитов, монтируемых на роторе, т.е. количество полюсов, и количество прорезей в статоре, имеющем намотанные вокруг него обмотки. Когда отношение между количеством полюсов и количеством прорезей представляется в виде отношения «количество полюсов: количество прорезей», электродвигатели в общих чертах классифицируются на 2n:3n, 4n:3n, 8n:9n, 10n:9n, 10n:12n и 14n:12n. Здесь n - целое число, равное или большее 1. В конструкциях 8n:9n, 10n:9n, 10n:12n и 14n:12n пространственное распределение обмоток одной фазы и постоянных магнитов меняется. Вследствие этого посредством угла опережения момента времени подачи питания или увеличения угла подачи питания фаза подачи питания наступает раньше по сравнению с базовой величиной. Таким образом, постоянные магниты, как правило, размагничиваются.
На фиг. 25 схематично показан вид одного из примеров ротора и статора, имеющего шесть полюсов и девять прорезей, а на фиг. 25 - схематичный вид одного из примеров ротора и статора с восемью полюсами и девятью прорезями. То есть на фиг. 25 показан пример описанного выше отношения 2n:3n, где n равно 3. На фиг. 25 и 26 V представляет фазу V, U представляет фазу U, a W представляет фазу W. При этом знак "-" при каждой фазе означает, что обмотка намотана в обратном направлении. Кроме того, на фиг. 26 показан пример отношения 8n:9n, где n равно 1. На фиг. 25 пространственное расположение обмоток U1, U2 и U3 одной фазы и постоянных магнитов 222b одинаково в окружном направлении. Вследствие этого, если значение угла опережения момента времени подачи питания задано в виде электрического утла 91, то угол опережения каждой обмотки может быть представлен как
U1:θ1=U2:θ1=U3:θ1.
Напротив, на фиг. 26 пространственное расположение обмоток U1, U2 и U3 одной фазы и постоянных магнитов 222b изменяется в окружном направлении. Вследствие этого, если значение угла опережения момента времени подачи питания задано в виде электрического угла θ1, то угол опережения каждой обмотки может быть представлен как
U1:θ1-20°=U2:θ1=U3:θ1+20°.
Следует заметить, что направление вращения ротора 222 предполагается по часовой стрелке, если смотреть в направлении оси со стороны червячного колеса 223. По сути, постоянные магниты 222b, обращенные к U3, имеют большой угол опережения и вследствие этого, как правило, размагничиваются.
Из этого следует, что для осуществления первого и второго режимов управления желательно использовать бесщеточный электродвигатель, имеющий конструкцию 2n:3n или 4n:3n, при которой пространственное расположение обмоток одной фазы и постоянных магнитов одинаково в окружном направлении. При этом если количество постоянных магнитов увеличивается, механическое влияние электрического угла в отношении угла вращения увеличивается. То есть возрастает влияние задержки тока. Таким образом, при том же количестве прорезей желательна конструкция 2n:3n, при которой количество постоянных магнитов может быть уменьшено. Следует заметить, что приводное устройство 233 и статор 221 могут иметь интегральную конструкцию или отдельную конструкцию. Однако предпочтительно, чтобы приводное устройство 233 и статор 221 имели интегральную конструкцию, позволяющую иметь короткие соединительные провода от приводного устройства 233 к обмоткам, имеющие небольшое сопротивление.
При этом, если продолжительность включения бесщеточного электродвигателя 219 регулируется, то кпд электродвигателя с приводным устройством 233, являющийся одним из примеров характеристик электродвигателя, растет вместе с увеличением продолжительности включения. Это происходит вследствие того, что потери из-за приводного устройства 233 растут при уменьшении продолжительности включения. Пример отношения между продолжительностью включения и характеристиками электродвигателя показан на фиг. 27. На фиг. 27 по вертикальной оси откладывается частота вращения вала ротора и кпд электродвигателя, а по горизонтальной - крутящий момент вала ротора. При этом на фиг. 27 "прод. вкл." обозначает режим работы - «продолжительность включения» (duty). Необходимо заметить, что на фиг. 27 жирными линиями показано отношение между крутящим моментом и частотой вращения, а пунктирными линиями - отношение между крутящим моментом и кпд.
В бесщеточным электродвигателе 219 данного варианта выполнения в качестве условия для переключения между первым и вторым режимами управления может использоваться работа переключателя 237 стеклоочистителя. Когда интенсивность выпадения дождя или снега мала, водитель с помощью переключателя 237 стеклоочистителя может выбрать низкоскоростной режим очистки, чтобы рычаги 214 и 216 работали с заданной низкой скоростью.
Напротив, когда интенсивность выпадения дождя или снега велика, водитель с помощью переключателя 237 стеклоочистителя может выбрать высокоскоростной режим очистки, чтобы рычаги 214 и 216 работали с более высокой скоростью, чем низкая скорость. Водитель определяет интенсивность выпадения дождя или снега по своему собственному разумению, и здесь нет четких критериев различия между большой и малой интенсивностью выпадения дождя или снега.
В качестве условия переключения с помощью переключателя 237 стеклоочистителя между высокоскоростным и низкоскоростным режимами очистки, первый режим управления может осуществляться, если выбран низкоскоростной режим очистки, а второй режим управления может осуществляться, если выбран высокоскоростной режим очистки.
При этом ввиду отсутствия в бесщеточном электродвигателе 219 данного варианта выполнения щеток, коллектора и т.д. отсутствует момент трения из-за скольжения щеток по коллектору, что предотвращает уменьшение кпд электродвигателя и повышение температуры щетки и исключает ограничение мощности электродвигателя. Кроме того, в бесщеточном электродвигателе 219 данного варианта выполнения отсутствуют шумы и рабочие звуки, возникающие из-за работы щеток, и обеспечивается тишина. Следует заметить, что несмотря на то что вьппеописанный вариант осуществления изобретения таков, что переключение между первым и вторым режимами управления осуществляется исходя из частоты вращения, крутящего момента или рабочего угла вала 222а ротора, упомянутый вал 222а ротора является элементом, представляющим собой часть ротора 222, и вследствие этого одинаковый технический эффект может быть получен, если вал 222а ротора, описанный в вышеприведенном варианте осуществления изобретения, заменить на ротор 222.
Само собой разумеется, что настоящее изобретение не ограничивается вышеописанным вариантом его осуществления и может быть модифицировано в пределах, не выходящих за рамки существа изобретения. Например, стеклоочиститель может представлять собой конструкцию, в которой вал ротора бесщеточного электродвигателя вращается только в одном направлении. Кроме того, переключатель стеклоочистителя не ограничивается переключателем, приводимым в действие водителем, и может быть переключателем обнаружения, имеющим функцию обнаружения интенсивности выпадения дождя, снега или т.п. С описанной выше конструкцией блок управления скоростью вращения автоматически запускает стеклоочиститель исходя из интенсивности выпадения дождя, снега и т.п. и осуществляет управление автоматическим переключением между низкоскоростным и высокоскоростным режимами очистки. В таком случае блок управления скоростью вращения заранее сохраняет в памяти данные, такие как интенсивность выпадения дождя, снега или т.п., которые служат основой для переключения между низкоскоростным и высокоскоростным режимами очистки.
При этом датчик скорости автомобиля, определяющий скорость перемещения автомобиля, может определять скорость перемещения автомобиля не непосредственно, а из информации, передаваемой от щетки стеклоочистителя в стеклоочиститель, или из косвенно передаваемой в бесщеточный электродвигатель информации, такой как сопротивление и состояние очищаемой поверхности. Здесь под сопротивлением понимается сопротивление, которое испытывает щетка стеклоочистителя из-за встречного ветра, и сопротивление, возникающее при очистке щеткой поверхности, и стеклоочиститель определяет упомянутое сопротивление, состояние очищаемой поверхности и т.д. от щетки стеклоочистителя через посредство выходного вала. При этом косвенно передаваемая на бесщеточный электродвигатель информация предназначена для распознавания информации, получаемой из упомянутого сопротивления, состояния очищаемой поверхности и т.п. в качестве информации о скорости перемещения автомобиля и определяется посредством преобразования, как если бы она обнаруживалась приводным устройством в качестве скорости перемещения автомобиля. При этом количество обмоток и количество постоянных магнитов при желании может быть изменено.
Кроме того, предлагаемый в настоящем изобретении стеклоочиститель относится к стеклоочистителю заднего ветрового стекла. То есть под ветровым стеклом в стеклоочистителе настоящего изобретения подразумевается лобовое ветровое стекло и заднее ветровое стекло. При этом предлагаемый в настоящем изобретении стеклоочиститель имеет конструкцию, в которой выходной вал, выполненный коаксиально с червячным колесом, служит поворотным валом. Кроме того, предлагаемый в настоящем изобретении стеклоочиститель включает в себя конструкцию, в которой два рычага стеклоочистителя приводятся в действие отдельными бесщеточными электродвигателями.
При этом предлагаемый в настоящем изобретении бесщеточный электродвигатель подразумевает бесщеточный электродвигатель с внутренним ротором, расположенным внутри статора, или бесщеточный электродвигатель с наружным ротором, расположенным снаружи статора. Кроме того, в дополнение к бесщеточному электродвигателю для приведения в действие стеклоочистителя, предлагаемый в настоящем изобретении бесщеточный электродвигатель находит применение в имеющемся в автомобиле устройстве обеспечения удобства и комфорта, к примеру в устройстве автоматической сдвижной двери, устройстве автомобильного люка или устройстве автоматического стеклоподъемника для приведения в действие исполнительных органов, таких как дверь, люк, ветровое стекло.
Промышленная применимость
Упомянутый бесщеточный электродвигатель используется в качестве источника приводной энергии в стеклоочистителе или подобном ему устройстве, устанавливаемом на транспортном средстве, таком как автомобиль. С таким приводимым во вращение бесщеточным электродвигателем щетка стеклоочистителя совершает возвратно-поступательное движение по поверхности ветрового стекла с целью его очистки, тем самым обеспечивая поле зрения для водителя и т.п.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕСЩЕТОЧНЫЙ ДВИГАТЕЛЬ СТЕКЛООЧИСТИТЕЛЯ | 2014 |
|
RU2640377C2 |
| ЭЛЕКТРОДВИГАТЕЛЬ СТЕКЛООЧИСТИТЕЛЯ | 2011 |
|
RU2566591C2 |
| УСТРОЙСТВО ПРИВЕДЕНИЯ В ДЕЙСТВИЕ ЭЛЕКТРОДВИГАТЕЛЯ | 2013 |
|
RU2609606C2 |
| ЭЛЕКТРОДВИГАТЕЛЬ И МОТОР-РЕДУКТОР | 2013 |
|
RU2554931C2 |
| ЭЛЕКТРОДВИГАТЕЛЬ С РЕДУКТОРОМ | 2010 |
|
RU2510561C2 |
| ЭЛЕКТРОДВИГАТЕЛЬ И МОТОР -РЕДУКТОР | 2009 |
|
RU2520937C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ЗАПУСКА ЭЛЕКТРОДВИГАТЕЛЯ | 2011 |
|
RU2532532C2 |
| БЕССТУПЕНЧАТЫЙ ЭЛЕКТРОМАШИННЫЙ ГИБРИДНЫЙ ВАРИАТОР С ЦИФРОВЫМ УПРАВЛЕНИЕМ | 2007 |
|
RU2362687C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ УСИЛИТЕЛЬ РУЛЯ АВТОМОБИЛЯ И ЭЛЕКТРОДВИГАТЕЛЬ ДЛЯ УСИЛИТЕЛЯ РУЛЯ | 2005 |
|
RU2278797C1 |
| БЕСЩЕТОЧНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2001 |
|
RU2231200C2 |

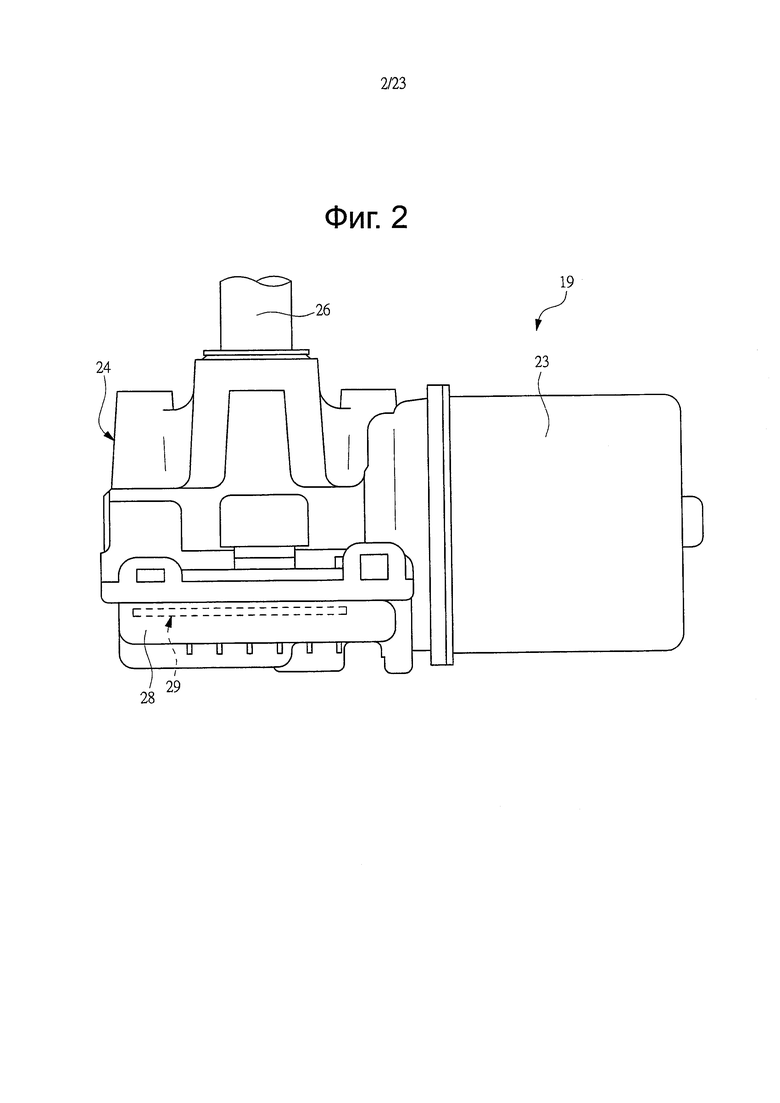




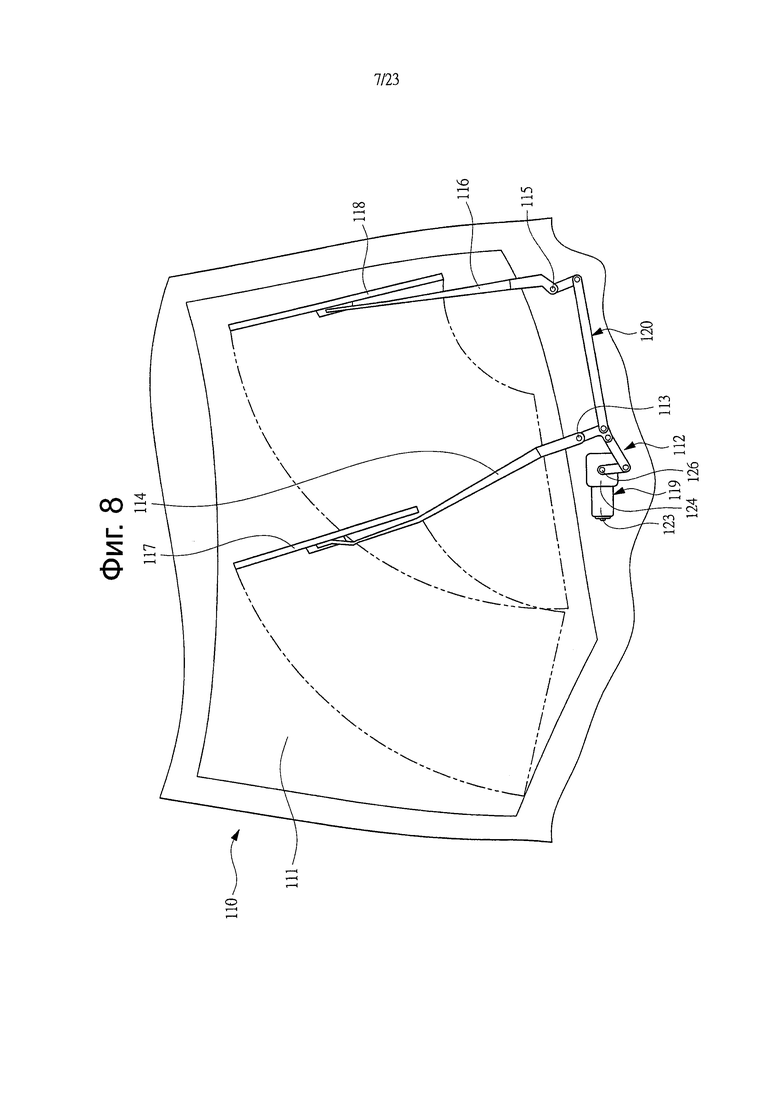

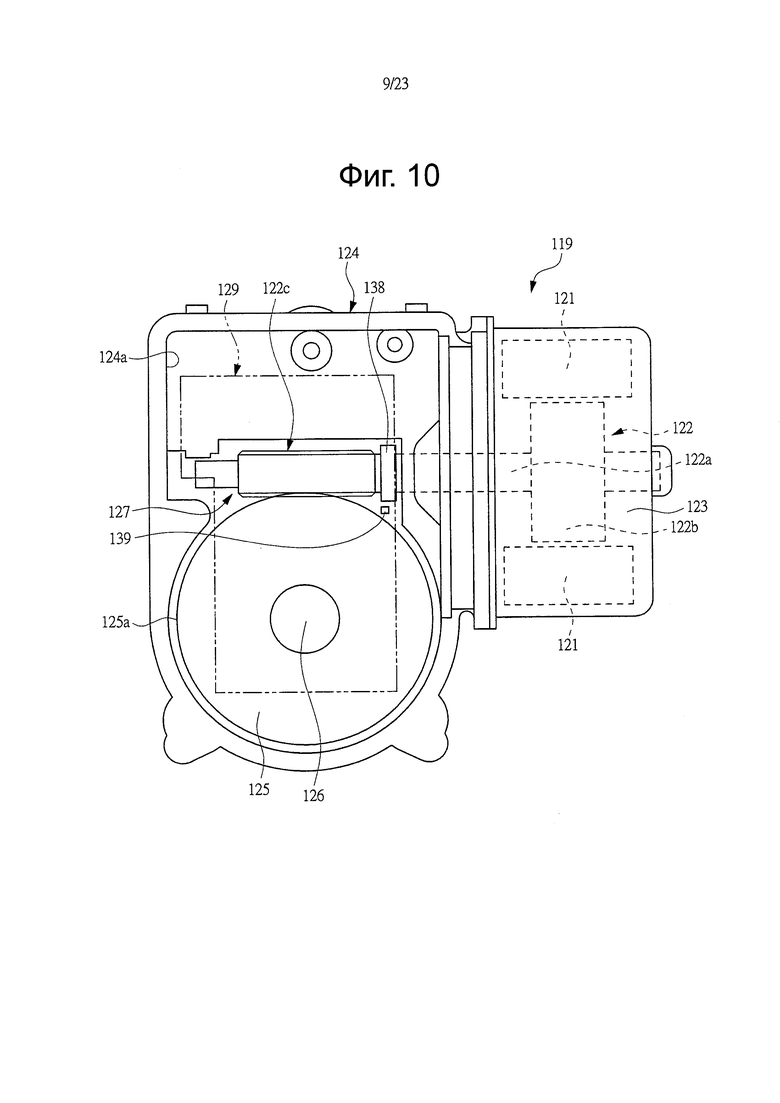
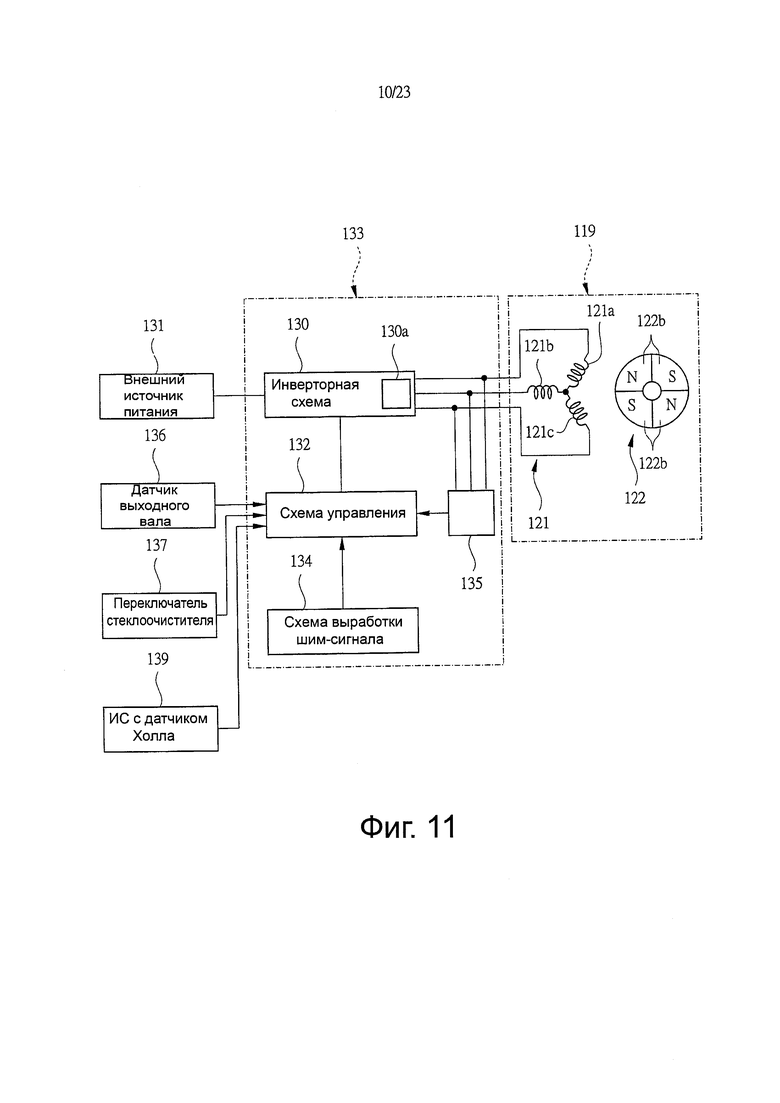
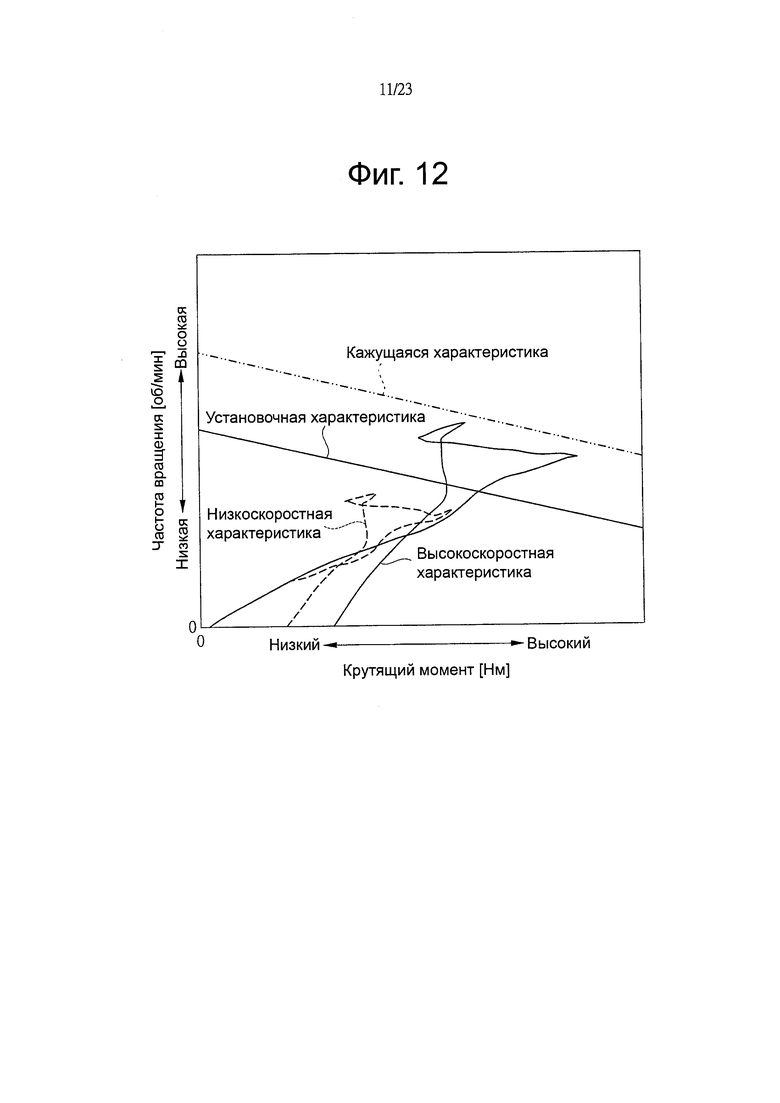


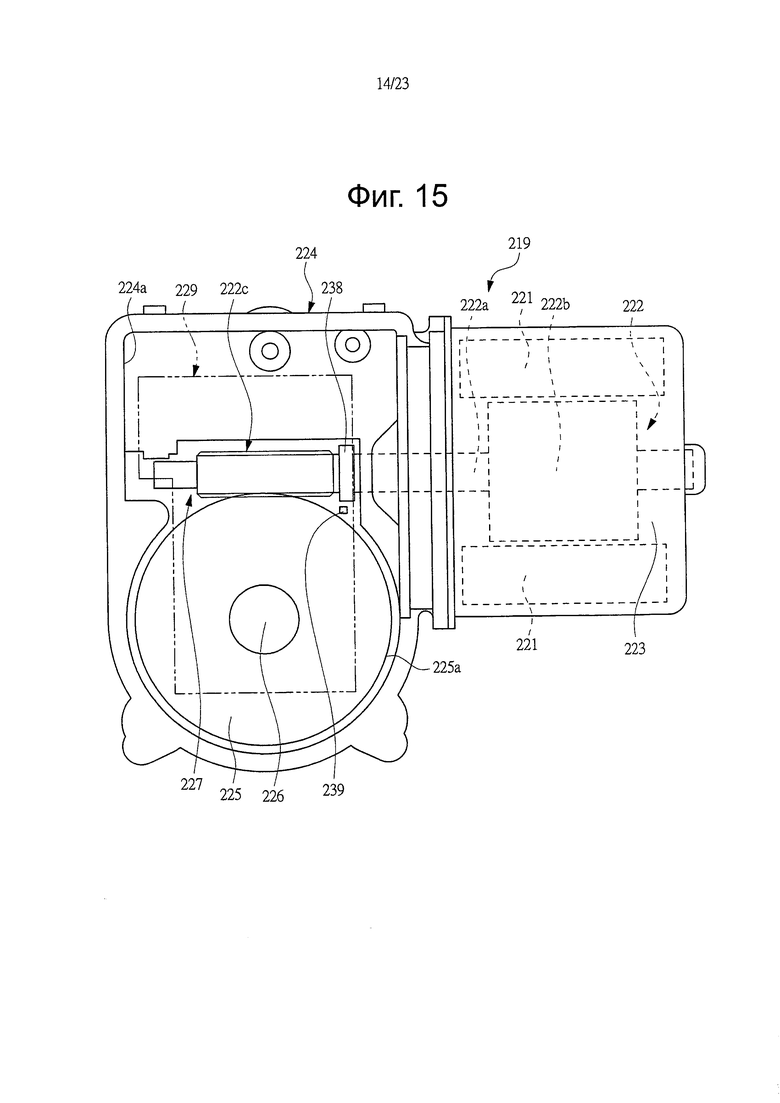
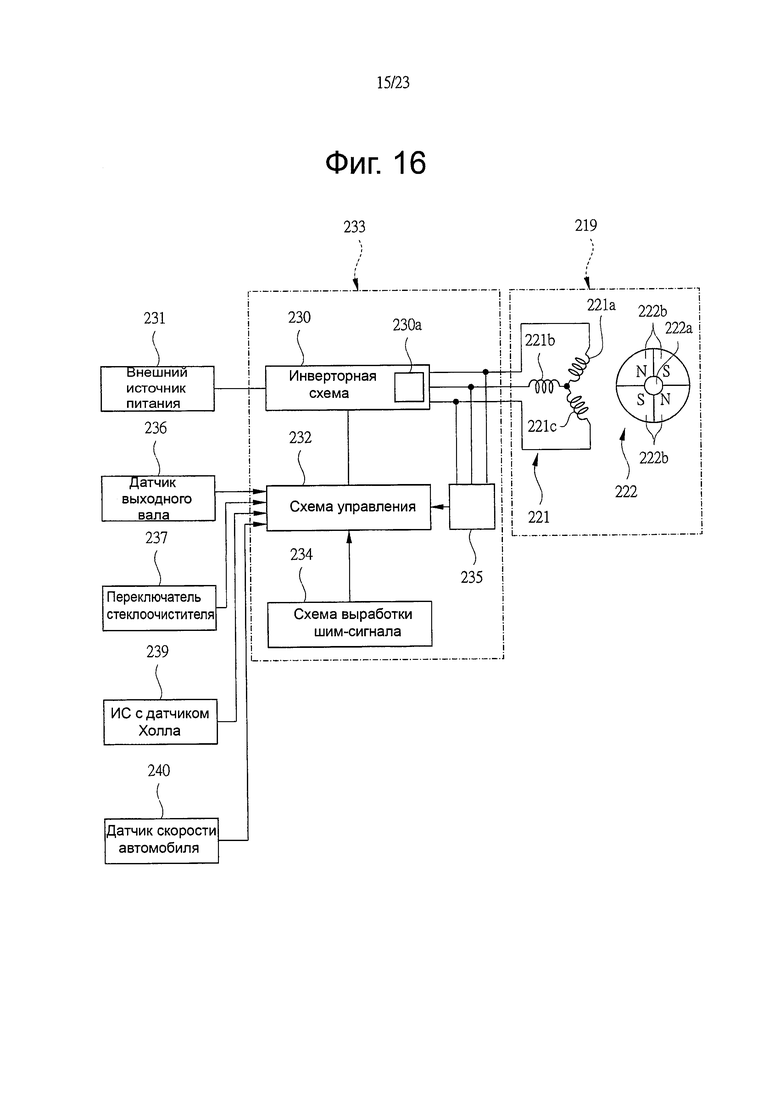

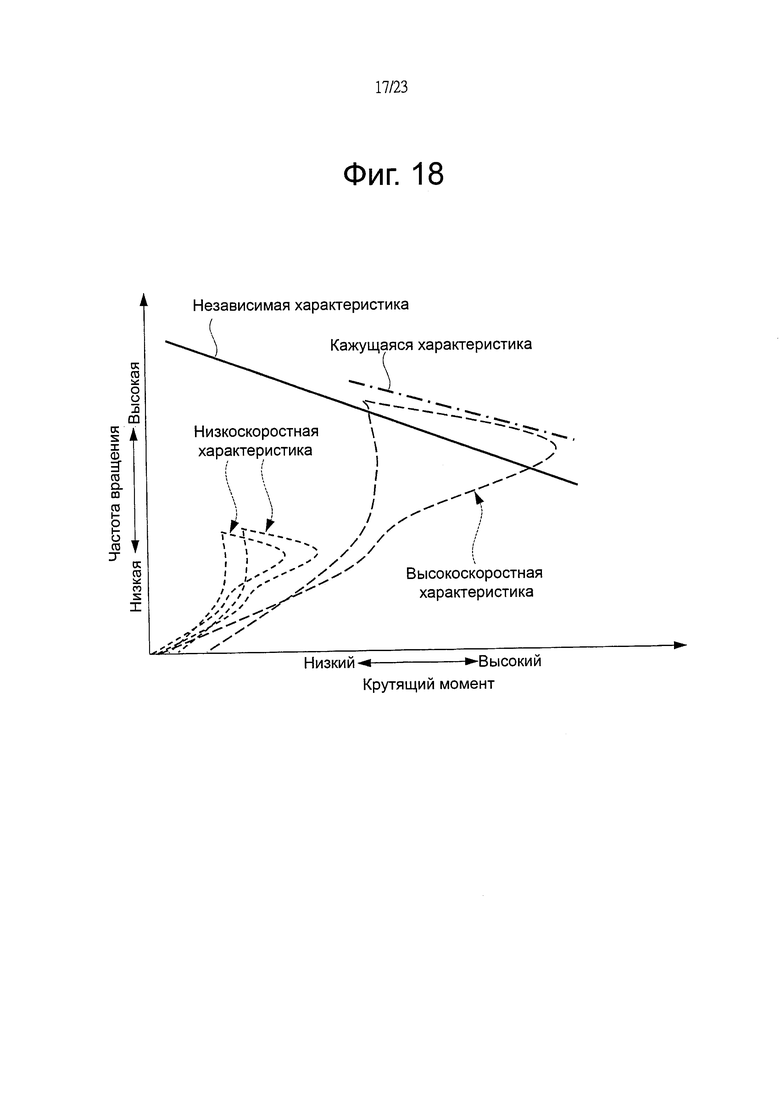

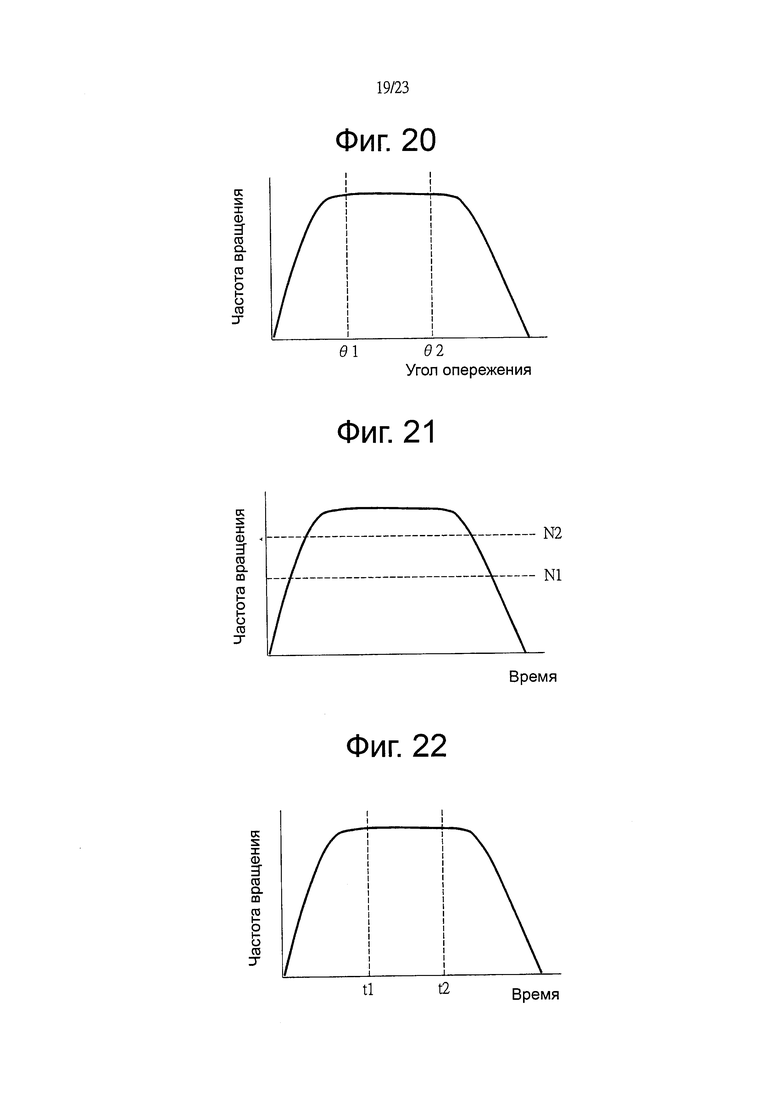

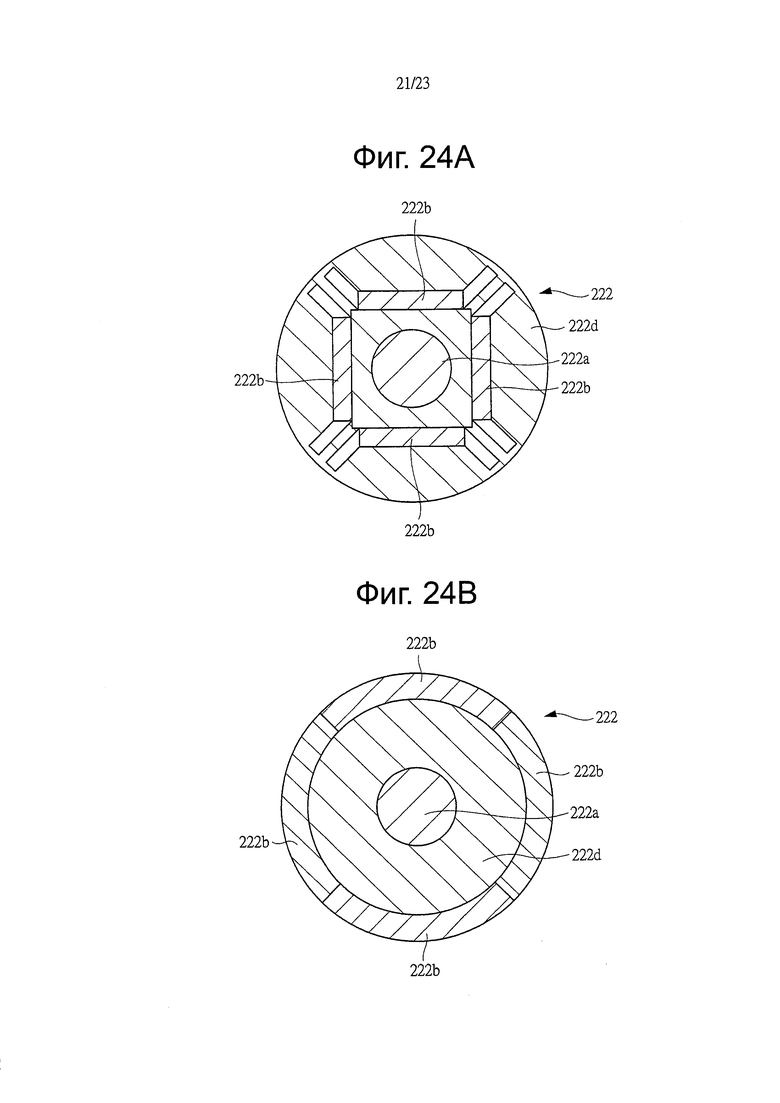


Изобретение относится к области электротехники и может быть использовано в стеклоочистителе. Технический результат - уменьшение габаритов. Бесщеточный электродвигатель содержит статор (21) с обмотками (21а, 21b и 21с), ротор (22), вращаемый вращающимся магнитным полем, и переключающий элемент (30а). Бесщеточный электродвигатель содержит блок (33) управления частотой вращения, который выполняет переключение между низкоскоростным и высокоскоростным режимами, причем в низкоскоростном режиме блок (33) управления частотой вращения подает ток на обмотки (21а, 21b и 21с) в заданный момент времени подачи питания и регулирует продолжительность включения для регулирования частоты вращения ротора (22), а в высокоскоростном режиме блок (33) управления частотой вращения подает ток на обмотки (21а, 21b и 21с) в более ранний момент подачи питания по сравнению с низкоскоростным режимом, таким образом выполняя регулирование частоты вращения ротора (22) путем ослабления вращающегося магнитного поля по сравнению с низкоскоростным режимом. 2 н. и 4 з.п. ф-лы, 31 ил.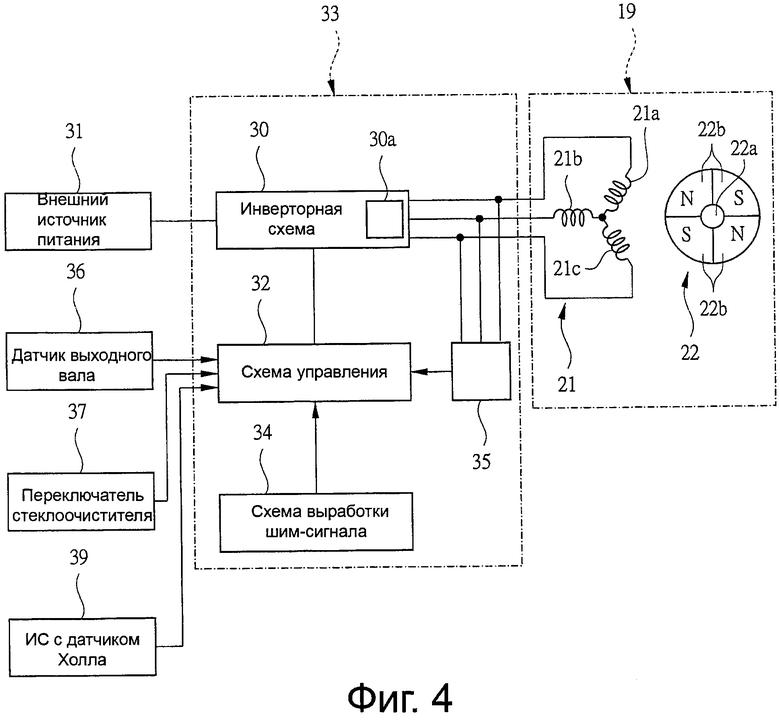
1. Бесщеточный электродвигатель, содержащий статор с обмоткой, на которую подается ток; соединенный с исполнительным органом ротор, вращаемый создаваемым обмоткой вращающимся магнитным полем, и переключающий элемент, установленный на пути подачи тока к обмотке, при этом:
бесщеточный электродвигатель содержит блок управления частотой вращения, управляющий частотой вращения ротора по меньшей мере в двух режимах управления, отличающихся друг от друга частотой вращения ротора, причем
если из режимов управления выбран первый режим, то блок управления частотой вращения подает ток в обмотку в заданный момент времени подачи питания и регулирует продолжительность включения, означающую соотношение по времени включенного состояния переключающего элемента, для регулирования частоты вращения ротора, а если из режимов управления выбран второй режим, то блок управления частотой вращения подает ток в обмотку в более ранний момент времени подачи питания по сравнению с моментом подачи питания в первом режиме управления, таким образом выполняя регулирование ослабления вращающегося магнитного поля, создаваемого обмоткой, относительно вращающегося магнитного поля в первом режиме управления, для регулирования частоты вращения ротора.
2. Бесщеточный электродвигатель по п. 1, дополнительно содержащий механизм уменьшения скорости вращения, установленный на пути передачи мощности привода от ротора к исполнительному органу, причем механизм уменьшения скорости имеет конструкцию, позволяющую уменьшать частоту вращения на выходе относительно частоты вращения на входе.
3. Бесщеточный электродвигатель по п. 1, дополнительно содержащий блок управления направлением вращения, выполненный с возможностью вращения ротора вперед и назад посредством переключения направления тока, подаваемого в обмотку.
4. Бесщеточный электродвигатель по п. 2, содержащий плату управления, включающую в себя блок управления частотой вращения, при этом механизм уменьшения скорости вращения и плата управления размещены в общем корпусе.
5. Стеклоочиститель, содержащий рычаг стеклоочистителя, являющийся исполнительным органом для очистки автомобильного ветрового стекла, при этом рычаг стеклоочистителя соединен с ротором бесщеточного электродвигателя по любому из пп. 1-4.
6. Стеклоочиститель по п. 5, содержащий магнит датчика и датчик частоты вращения, причем магнит датчика установлен с возможностью вращения вместе с ротором, а датчик частоты вращения выполнен с возможностью выдавать сигнал в соответствии с изменением магнитного полюса магнита датчика при вращении ротора,
при этом при выполнении регулирования ослабления магнитного поля блок регулирования частоты вращения регулирует частоту вращения ротора посредством определения частоты вращения на основе сигнала от датчика частоты вращения и подачи питания на обмотку с опережением на электрический угол 30 градусов.
| БЕСКОНТАКТНЫЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 2006 |
|
RU2331963C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ СТЕКЛООЧИСТИТЕЛЯ | 1996 |
|
RU2166445C2 |
| Ручной прибор для изготовления шпиллерных репетиционных пружин | 1928 |
|
SU9605A1 |
| DE 3628497 A, 03.03.1988 | |||
| JP 3922147 B2, 30.05.2007 | |||
| JP 2007202391 A, 09.08.2007 | |||
| US 6791219 B1, 14.09.2004 | |||
| Демпфер колебаний жидкости в емкости | 1973 |
|
SU492693A1 |
| WO2001025064 A1, 12.04.2001. | |||

