Область техники, к которой относится изобретение
Изобретение относится к модулю многоразового использования, являющемуся частью отсека с двигательной установкой для запуска космического летательного аппарата (ЛА) в космос, например, к ракете-носителю, служащему для запуска в космос полезной нагрузки, такой как спутники связи.
Уровень техники
Хорошо известным примером ракеты-носителя является ракета "Ариан-5", содержащая центральный корпус, сформированный первой ступенью, носящей название криогенной основной ступени, и второй ступенью, называемой хранимой в заправленном состоянии ступенью с двигательной установкой. Первая ступень осуществляет транспортировку жидких кислорода и водорода, охлажденных до очень низких температур, являющихся топливом для криогенного двигателя. Последняя ступень содержит запускаемую полезную нагрузку, например, спутник. Ракета также включает в себя две ускорительные ступени с ракетными двигателями на твердом (порошковом) топливе (РДТТ), используемые при взлете. Криогенный двигатель запускается перед стартом ракеты и продолжает работать до отделения первой и второй ступеней.
Существуют также ракеты-носители, использующие метановые или порошковые двигательные установки.
Данные ракеты-носители, в частности их первые ступени, являются полностью используемыми, т.е. они не предназначены для повторного использования.
Разработка и изготовление ракеты-носителя связано с очень высокими затратами. Кроме того, разработка такой ракеты-носителя требует очень длительного периода времени.
Таким образом, ставилась задача разработки ракеты-носителя, первая ступень которой могла бы использоваться многократно, т.е., могла бы возвращаться на землю без повреждения после ее отделения от второй ступени. Такая ракета-носитель описывается в патентном документе US 6454216. Часть корпуса ракеты-носителя, образующая первую ступень, состоит из нижней части - силовой установки, промежуточной части, включающей в себя баки с горючим и окислителем, и верхней части, предназначенной для возврата всей первой ступени на землю. С этой целью первая ступень снабжена комплексом средств, обеспечивающих возможность возврата на землю и посадки. Первая ступень содержит аэродинамические поверхности, сложенные вдоль первой ступени во время запуска ракеты-носителя и раскрывающиеся при возврате первой ступени на землю, посадочное шасси, систему управления и атмосферные двигатели для обеспечения обратного полета и выполнения посадочных маневров.
Преимущество такой ракеты-носителя заключается в возможности полного возврата всей первой ступени.
Однако такая конструкция обладает рядом недостатков. Во-первых, при отделении от первой ступени баки промежуточной части уже пусты, и, следовательно, представляют собой очень большой объем с малой массой. Таким образом, средняя плотность первой ступени является низкой, что очень затрудняет ее возврат на землю. Кроме того, она требует крепления большого блока крыла к корпусу ракеты-носителя, в частности, к бакам, которые, как правило, не обладают большой жесткостью. Поэтому необходимо устанавливать конструктивные элементы для упрочнения области крепления. Введение вышеупомянутой площади крыла и упрочняющих элементов обуславливает появление дополнительной массы, которую необходимо перемещать, что приводит к увеличению размера баков, и, следовательно, значительному повышению стоимости ракеты-носителя. Следовательно, выигрыш, получаемый от возврата на землю всей первой ступени, частично теряется вследствие модификаций, производимых для реализации данного возврата. Кроме того, данный тип ракеты-носителя очень сильно отличается от известных ракет-носителей.
В еще не опубликованной международной патентной заявке PCT/EP 2009/067549 описывается модуль многоразового применения с хвостовым оперением ракеты-носителя в виде аэродинамических поверхностей, представляющим собой три ребра, два из которых являются крыльями изменяемой геометрии, а третье - направляющим стабилизатором. Кроме того, в данном модуле используется парашют для снижения скорости при входе в атмосферу. Данный модуль является вполне удовлетворительным, но, однако, желательно еще более повысить его прочность и надежность.
Таким образом, задачей изобретения является создание ракеты-носителя, эксплуатационные расходы которой были бы меньше, чем у существующих в настоящее время ракет-носителей.
Раскрытие изобретения
Указанная выше задача достигается с помощью ракеты-носителя, содержащей, по меньшей мере, одну ступень, разделенную на две части, первую часть, включающую в себя ракетные двигатели, электронное оборудование, двигательный отсек и систему наддува баков, и автономные средства для полета в атмосфере (аэродинамические поверхности, двигатель для полета в атмосфере и его топливо), и вторую часть, включающую в себя баки; данные две части отделяются друг от друга после запуска, при этом первая часть включает в себя средства, обеспечивающие ее возвращение на землю без повреждения для повторного использования в новой ракете-носителе. Первая часть расположена в нижней части указанной ступени.
Другими словами, обеспечивается возможность повторного использования дорогостоящих компонентов, и с этой целью предусмотрен отделяемый модуль, оснащенный аэродинамическими поверхностями и авиационным двигателем, обеспечивающими возможность его посадки на обычную ВПП. Невозвращение баков значительно упрощает возвращение остальных элементов за счет повышения плотности. Несущая поверхность содержит фиксированное хвостовое оперение и стабилизаторы, что делает реализацию и управление очень простым.
Расположение внизу возвращаемой на землю части в сочетании с наличием элементов хвостового оперения обеспечивает более высокую устойчивость ракеты-носителя при наборе высоты.
В частности, данный модуль включает в себя аэродинамические несущие поверхности, образованные двумя плоскими крыльями, на конце каждого из которых шарнирно установлены поворотные стабилизаторы. Таким образом, функции создания подъемной силы и стабилизации разделены, что упрощает оптимизацию каждой из них.
Преимущество настоящего изобретения заключается также в том, что, хвостовое оперение ракеты-носителя используется в качестве крыла при возвращении на землю.
Таким образом, предметом данного изобретения является в основном многоразовый модуль для отсека с двигательной установкой, служащий для запуска ЛА в космос, содержащий, по меньшей мере, одну ступень, причем указанный многоразовый модуль, имеющий продольную ось соединен с невозвращаемой частью во время запуска; указанный многоразовый модуль содержит центральный корпус, силовую установку для запуска ЛА, системы командования и управления силовой установкой, двигательное устройство для полета с дозвуковой скоростью, аэродинамические поверхности для полета с дозвуковой скоростью и посадочное шасси; аэродинамическая несущая поверхность содержит два по существу плоских крыла, прикрепленных с обеих сторон центрального корпуса модуля, и стабилизаторы, установленные с возможностью поворота во вращении на конце каждого крыла, причем каждый стабилизатор содержит, по меньшей мере, одну пару закрылков верхней и нижней поверхностей крыла, поворачивающихся на каждом стабилизаторе таким образом, что они могут отходить друг от друга и устанавливаться по обе стороны средней плоскости стабилизатора, или соединяться и упираться друг в друга, образуя единый стабилизатор, и средства продольной стабилизации; указанный многоразовый модуль предназначен для установки в нижней части указанной ступени, причем невозвращаемая часть, содержит, по меньшей мере, один бак для снабжения топливом силовой установки; вышеупомянутые многоразовый модуль и невозвращаемая часть отделяются друг от друга, когда отсек с двигательной установкой достигает заданной высоты, при этом многоразовый модуль (14) выполнен с возможностью совершения управляемой посадки после осуществления им крейсерского полета, например, с целью возврата на место запуска.
В частности, одно из преимуществ изобретения заключается в том, что закрылки нижней и верхней поверхностей крыла, образуя единый закрылок, создают средство продольной стабилизации.
Преимущество изобретения заключается также в том, что, несущие аэродинамические поверхности образованы хвостовым оперением данного ЛА.
В предпочтительном варианте осуществления, стабилизаторы отклоняются для выполнения поворота ЛА относительно оси, по существу параллельной продольной оси модуля. Поворот с целью вращения может осуществляться, например, с помощью цилиндрического или шарнирного соединения.
Двигательное средство модуля для полета на дозвуковой скорости может представлять собой средство любого типа, например, атмосферный или электроракетный движитель, турбовинтовой двигатель, пульсирующий воздушно-реактивный двигатель (ПуВРД), воздушный винт с тепловым двигателем или электрическим двигателем. Воздушный винт может располагаться как на центральном фюзеляже, так и на концах крыла.
В конкретном примере, многоразовый модуль согласно настоящему изобретению может включать в себя два тяговых двигателя газотурбинного типа, каждый из которых установлен в основании крыла.
В случае многоразового модуля согласно настоящему изобретению, оснащенного, по меньшей мере, одним турбореактивным двигателем, преимущество данного многоразового модуля заключается в том, что он содержит термобатарею для снабжения энергией стартера тягового двигателя или двигателей для полета на дозвуковой скорости, что позволяет осуществлять их быстрый запуск.
Многоразовый модуль согласно настоящему изобретению предпочтительно имеет затупленную носовую часть.
Еще одним предметом данного изобретения является отсек с двигательной установкой, предназначенный для запуска ЛА в космос и содержащий, по меньшей мере, одну ступень, включающую в себя многоразовый модуль согласно настоящему изобретению и невозвращаемую часть, в которую входит, по меньшей мере, один бак для снабжения топливом силовой установки.
Отсек с двигательной установкой может включать в себя боковые ускорительные ступени, по меньшей мере, одну, содержащую многоразовый модуль согласно настоящему изобретению.
Еще одним предметом настоящего изобретения является ЛА типа ракеты-носителя, оборудованный отсеком с двигательной установкой согласно настоящему изобретению, содержащий, по меньшей мере, две ступени, одна из которых образована отсеком с двигательной установкой, а другая - предназначена для транспортировки полезной нагрузки, причем указанные две ступени являются разделяемыми.
Ракета-носитель согласно настоящему изобретению может быть ракетой-носителем любого типа от наноносителя до супертяжелой ракеты-носителя. Настоящее изобретение может быть применено к центральному корпусу или к боковым ускорительным ступеням, добавленным к центральному корпусу, также называемым стартовыми ускорителями, как в ракете типа "Ариан-5".
Отсек с двигательной установкой предпочтительно образует нижнюю ступень ракеты-носителя или одну из верхних ступеней.
Еще одним предметом настоящего изобретения является способ возвращения на землю многоразового модуля согласно настоящему изобретению, включающий в себя следующие этапы:
a) отделение многоразового модуля от невозвращаемой части;
b) свободное падение многоразового модуля;
c) при входе в атмосферу открытие пар закрылков нижней и верхней поверхностей крыла и удержание их в открытом положении до достижения требуемой скорости;
d) закрытие пар закрылков нижней и верхней поверхностей крыла, в результате чего каждая пара образует единый закрылок;
e) включение имеющихся вспомогательных средств путем установки закрылков верхней и нижней поверхностей крыла в положение, при котором они создают отклоняющий момент;
f) запуск, по меньшей мере, одного тягового двигателя при полете с дозвуковой скоростью в конце периода использования имеющихся вспомогательных средств;
g) крейсерский полет к месту запуска, и
h) посадку.
Преимущество настоящего изобретения заключается также в том, что, посадка является автоматической, предпочтительно, с последующим выруливанием с целью освобождения ВПП и возврата в безопасную зону, что является особенно полезным в случае, когда используется ВПП аэропорта.
Например, отключение имеющихся вспомогательных средств происходит на высоте приблизительно 2500 м.
Способ возвращения на землю в соответствии с настоящим изобретением может включать в себя, перед этапом входа в атмосферу, этап изменения положения стабилизаторов.
Во время этапа а) отделение многоразового модуля от невозвращаемой части преимущественно происходит в направлении, по существу перпендикулярном плоскости траектории полета, что дает возможность различать объекты при возврате в атмосферу. Краткое описание чертежей
Настоящее изобретение станет более понятным после ознакомления с приведенным ниже описанием со ссылками на прилагаемые чертежи, а именно:
На фиг.1 показан пример осуществления ракеты-носителя в соответствии с изобретением, вид с частичным разрезом;
на фиг.2 показана ракета-носитель, изображенная на фиг.1, в положении запуска, вид сбоку;
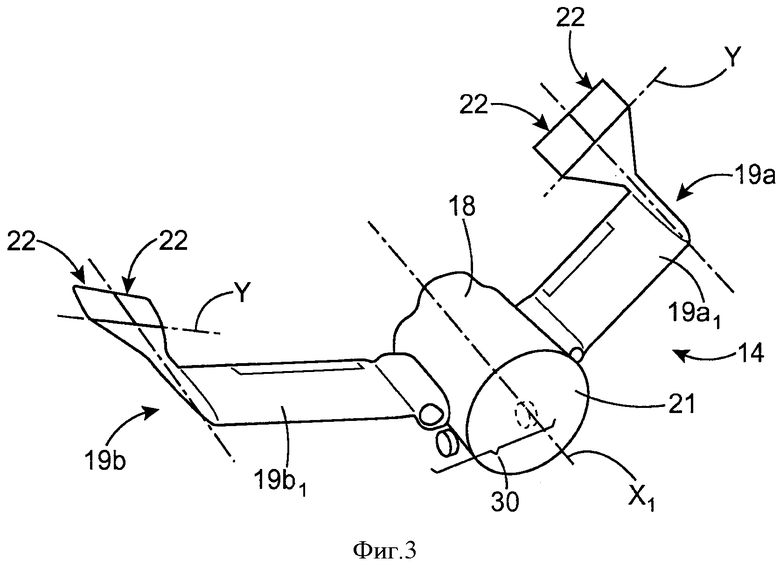
на фиг.3 показан многоразовый модуль согласно изобретению, вид спереди в перспективе;
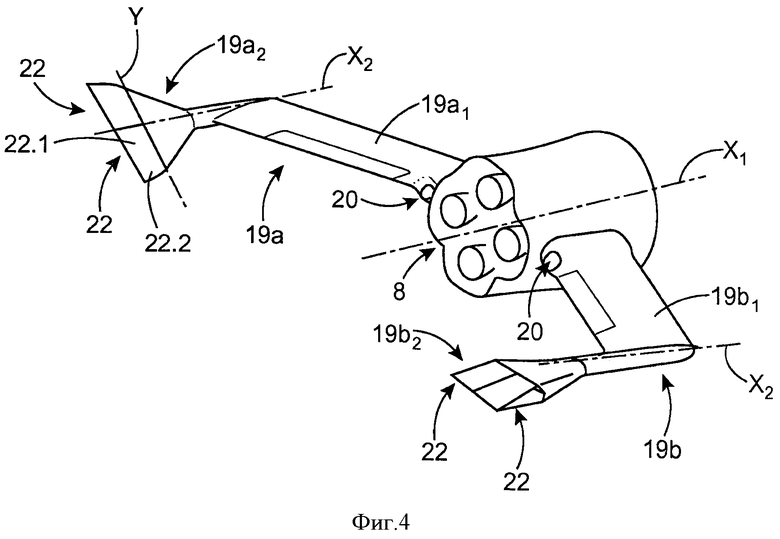
на фиг.4 показан многоразовый модуль, изображенный на фиг.3, вид сзади в перспективе;
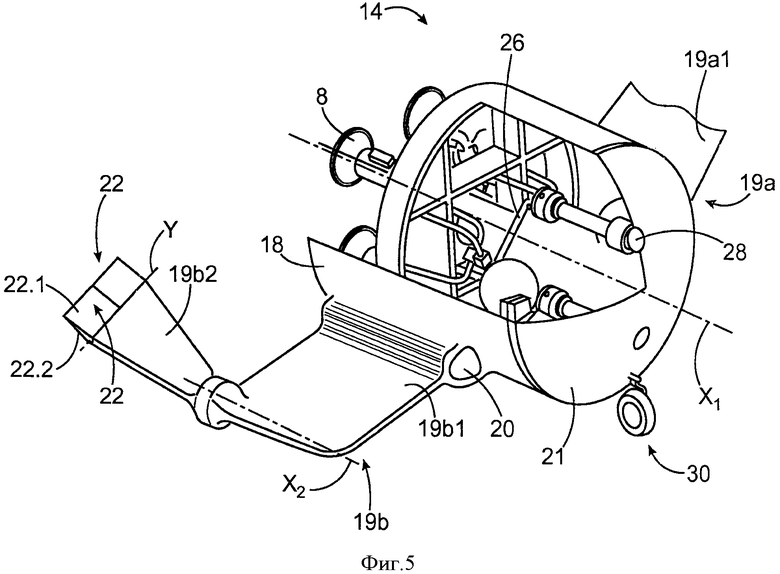
на фиг.5 показан многоразовый модуль, изображенный на фиг.3, вид с частичным с вырезом;
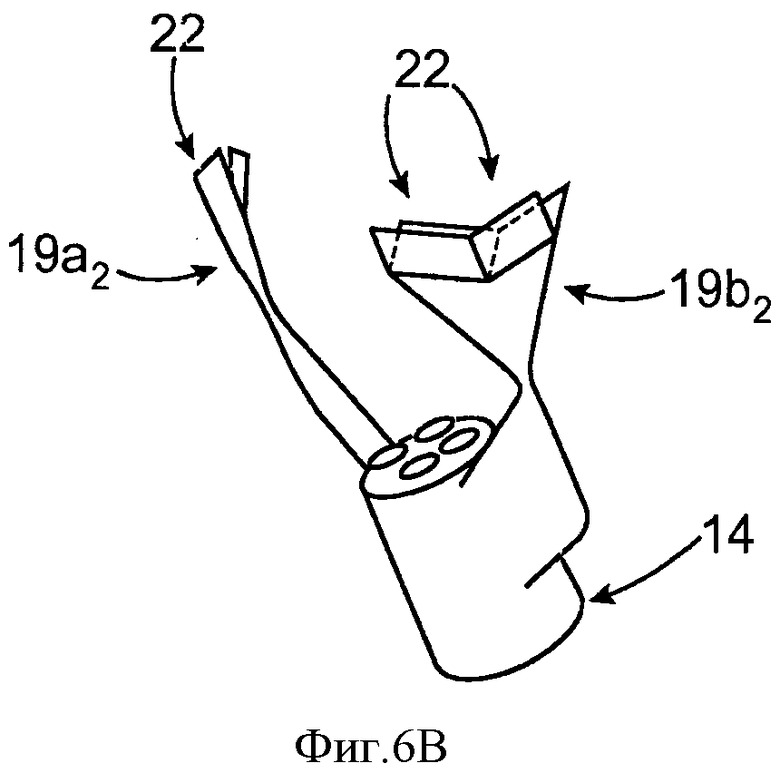
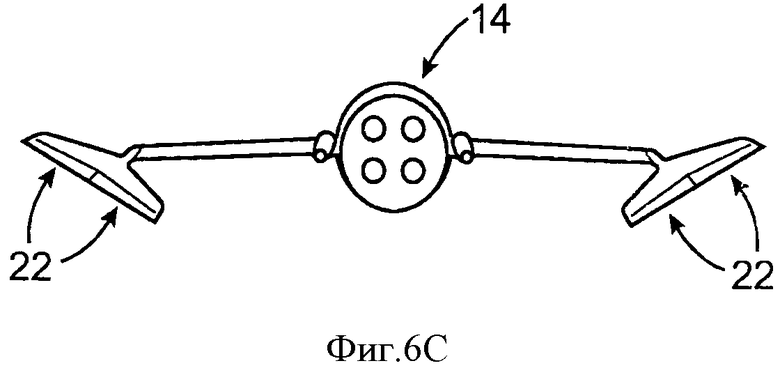
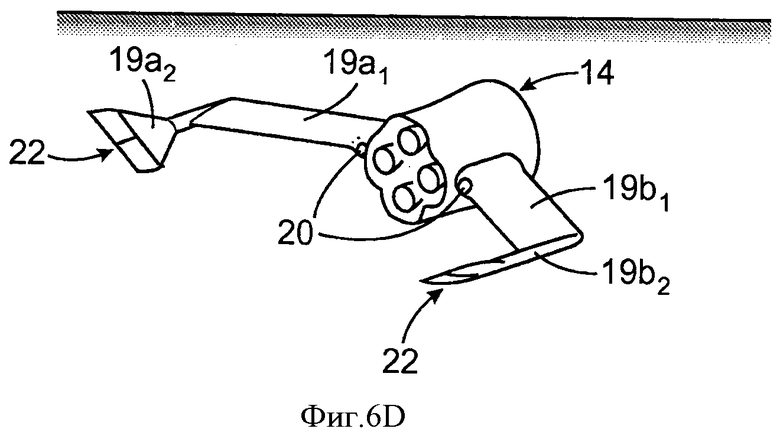
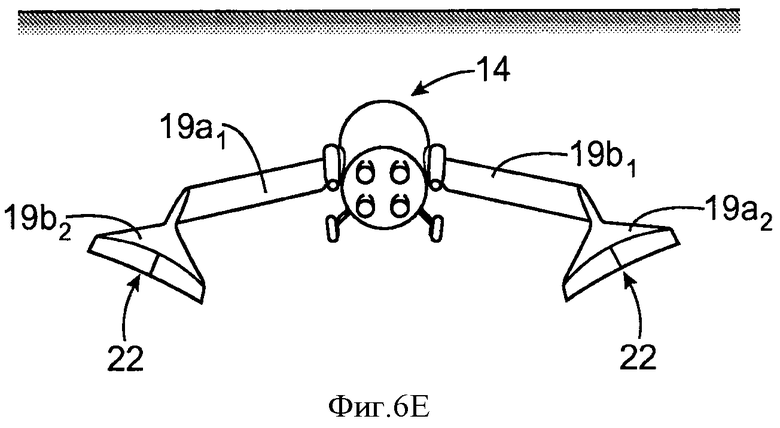
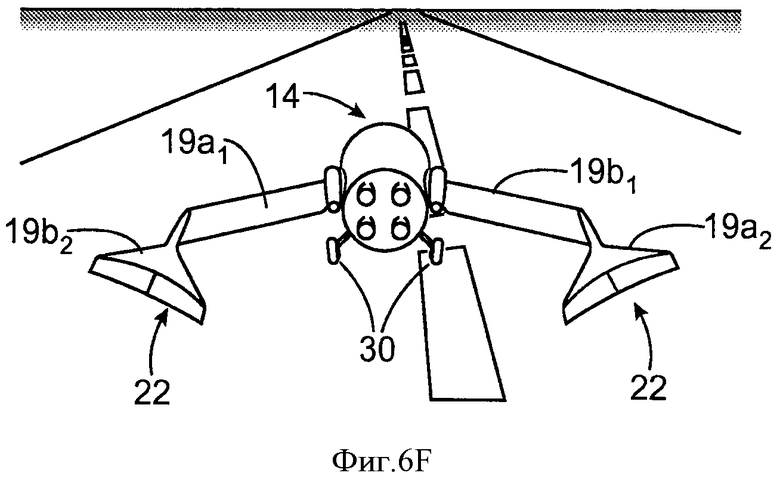
на фиг.6А-6F показан модуль, изображенный на фиг.3, в различных конфигурациях, имеющих место при возвращении на землю;
на фиг.7 представлен график траектории перемещения модуля, показанного на фиг.3, 4 и 5, в виде изменения высоты Z полета модуля в метрах в зависимости от расстояния D в метрах, пройденного на земле относительно точки отделения первой и второй ступеней.
Осуществление изобретения
В приведенном ниже описании приводится пример осуществления изобретения в виде двухступенчатой ракеты-носителя с целью объяснения настоящего изобретения, но, разумеется, настоящее изобретение не ограничивается лишь данным типом ракеты-носителя, как будет показано ниже.
На Фиг.1 и 2 показана ракета-носитель, выполненная в соответствии с настоящим изобретением, предназначенная, например, для вывода спутников связи на орбиту.
Ракета-носитель 2 включает в себя первую ступень 4, вторую ступень 6 и носовой обтекатель 9. Данная ракета-носитель имеет продольную ось X, вдоль которой установлены вышеназванные ступени. При взлете ракеты-носителя продольная ось X расположена вертикально.
Первая ступень 4 включает в себя элементы, служащие для сообщения движения ракете-носителю, как будет показано ниже.
Вторая ступень 6 служит для вывода полезной нагрузки, например, выводимого на орбиту спутника.
Первая ступень включает в себя расположенную в нижней части силовую установку 8, служащую для взлета ракеты-носителя. В представленном примере осуществления данная силовая установка состоит из четырех криогенных двигателей и общей системы управления ими.
Ракета-носитель также содержит хвостовое оперение 10 по наружному контуру первой ступени в ее нижней части. Данное хвостовое оперение 10 на этапе взлета участвует в аэродинамической стабилизации ракеты-носителя. Данное хвостовое оперение состоит из двух килей, установленных диаметрально противоположно друг другу на внешней поверхности первой ступени. Данные кили будут подробно описаны ниже.
Первая ступень 4 также включает в себя баки 12, 13 с топливом, необходимым для питания силовой установки 8 при взлете. Для криогенных двигателей таковыми являются бак 12 с жидким кислородом и бак 13 с жидким водородом.
Согласно настоящему изобретению, первая ступень 4 разделена на первую часть 14, предназначенную для повторного использования в ракете-носителе, и вторую отбрасываемую часть 16, называемую невозвращаемой. Первая часть 14 также называется модулем.
Модуль 14 включает в себя дорогостоящие элементы, повторное использование которых является весьма выгодным. Такими элементами, в частности, являются силовая установка 8 ракеты-носителя, двигательный отсек, система наддува, РЭО и устройства для выработки электроэнергии.
Невозвращаемая часть 16, включающая в себя бак или баки, выполнена таким образом, что она не содержит или содержит мало сложных дорогостоящих элементов, что делается с целью снижения затрат на части, поставляемые для повторного полета. Являясь расходным элементом, данная часть включает в себя лишь компоненты, необходимые только для эффективного и надежного снабжения топливом силовой установки.
Плотность модуля 14 высока, поскольку он не содержит пустых пространств, образуемых баками после выработки топлива.
Согласно настоящему изобретению, конструкция модуля 14 обеспечивает его возвращение на Землю. На Фиг.6А - 6F показан данный модуль во время различных фаз возвращения на Землю.
В рассматриваемом примере модуль 14 расположен в нижней части первой ступени 4. Это обусловлено тем, что модуль 14 имеет большую поверхность с установленными на ней килями, и его расположение внизу приводит к смещению назад аэродинамического фокуса и, таким образом, к увеличению запаса статической устойчивости на этапе набора высоты ракетой-носителем в пределах атмосферы.
Кроме того, при этом можно разместить ниже бак с жидким кислородом, поскольку он является наиболее тяжелым при запуске. Это дает возможность разместить бак с кислородом ближе к криогенным двигателям, а запас статической устойчивости при этом остается достаточным для обеспечения высокой устойчивости ракеты-носителя. Сближение бака 12 с кислородом и криогенными двигателями уменьшает длину трубопроводов подачи первой ступени, что обеспечивает снижение массы и объема, и, следовательно, стоимости первой ступени.
Предусматривается повторное использование хвостового оперения в качестве аэродинамической стабилизирующей поверхности при повторном входе в атмосферу, а также для создания подъемной силы во время возвращения на землю. В частности, это достигается нижним расположением модуля 14, т.е. тем, что он находится на уровне хвостового оперения ракеты-носителя. Это обеспечивается тем, что центр тяжести многоразового модуля расположен на уровне хвостового оперения ракеты-носителя, и, следовательно, хвостовое оперение можно использовать для создания аэродинамической подъемной силы модуля во время полета на дозвуковой скорости.
Ниже будет подробно описана конструкция модуля 14, и, в частности, средства, обеспечивающие его возвращение на Землю.
На Фиг.3-5 показан только многоразовый модуль 14.
Данный модуль 14 имеет продольную ось X1, совпадающую с осью X ракеты-носителя на этапе взлета. Он включает в себя центральную часть, образованную корпусом 18, являющуюся частью корпуса первой ступени 4, и два киля 19а, 19b хвостового оперения 10, диаметрально противоположно прикрепленные к корпусу 18.
Модуль 14 имеет носовую часть 21 затупленной формы, помогающую тормозить, за счет создания повышенного волнового сопротивления при полете со сверхзвуковой скоростью на начальном этапе вхождения в атмосферу, а также уменьшающую коэффициент продольной перегрузки (торможения) и снижающую максимальную динамическую нагрузку при повторном вхождении в атмосферу.
Модуль 14 также содержит двигательное средство для продвижения во время крейсерского полета при возвращении.
Двигательное средство модуля для полета на дозвуковой скорости может представлять собой средство любого типа, например, атмосферный или электроракетный движитель, турбовинтовой двигатель, пульсирующий воздушно-реактивный двигатель (ПуВРД), воздушный винт с тепловым двигателем или электрическим двигателем. Воздушный винт может располагаться как на центральном фюзеляже, так и на концах крыла.
В рассматриваемом примере модуль 14 содержит два турбореактивных двигателя 20, установленных в основании килей с обеих сторон корпуса 18.
В качестве варианта, модуль может иметь только одно двигательное средство, выполненное в виде двигателя в воздушном канале, расположенном по продольной оси модуля.
Если модуль 14 является нижней частью первой ступени ракеты-носителя, трубопроводы 26 модуля соединяются с трубопроводами (не показаны) невозвращаемой части с целью соединения баков невозвращающейся части 16 с криогенными двигателями 8 модуля 14. При отделении модуля 14 от невозвращаемой части данные трубы 26 закрываются с помощью клапанов 28 в местах их соединения с трубами невозвращаемой части.
Модуль 14 также содержит посадочное шасси 30. Поскольку рассматриваемый модуль является очень коротким, не обязательно иметь очень высокое посадочное шасси. Таким образом, может быть установлено неубирающееся или полуубирающееся посадочное шасси, постоянно выступающее из корпуса ракеты-носителя. За счет этого достигается простота и надежность конструкции. Но, разумеется, модуль с убирающимся шасси не выходит за пределы объема настоящего изобретения.
Посадочное шасси 30 состоит из трех колес, одно из которых, например, может быть прикреплено к корпусу модуля, а два других - к килям 19b и 19с или к центральной части.
Модуль 14 содержит системы пространственной стабилизации (не показаны), предназначенные для управления положением модуля во время внеатмосферного полета. Данные системы расположены на концах килей 19а и 19b рядом с соединениями со стабилизаторами, однако, они могут устанавливаться и в других местах. В качестве варианта, они могут располагаться на корпусе.
Далее мы рассмотрим конструкцию килей 19а и 19b. Данные кили образуют аэродинамическую несущую поверхность модуля 14 для создания подъемной силы и обеспечения возможности возвращения на землю.
Согласно настоящему изобретению, каждый киль 19а и 19b включает в себя крыло 19а1, 19b1 и стабилизатор 19а2,19b2 соответственно.
Поскольку кили имеют идентичную конструкцию, мы рассмотрим только один киль 19а.
Крыло 19а1 имеет, преимущественно, обычную форму, типичную для крыла самолета. Таким образом, данное крыло имеет неизменяемую геометрию. Кроме того, оно, преимущественно, имеет постоянную толщину, что упрощает его конструкцию.
Стабилизатор 19а2 шарнирно установлен на законцовке крыла 19а1. В рассматриваемом примере ось поворота X2 стабилизатора 19а2 по существу параллельна продольной оси X1 модуля. Угол поворота стабилизатора не превышает, например, 30° или 40°. В качестве варианта, ось поворота Х2 может быть наклонена относительно оси X1, с углом схождения или расхождения, например, от 5° до 10°.
Во время обратного полета стабилизаторы могут быть установлены неподвижно.
Например, сочленение стабилизатора 19а2 с крылом 19а1 выполнено с помощью цилиндрического соединения по оси Х2, и, следовательно, стабилизатор поворачивается вокруг оси Х2 относительно крыла 19а1. Возможно также сочленение с помощью соединения шарнирного типа.
В рассматриваемом примере стабилизатор имеет треугольную форму и сочленен с крылом в вершине треугольника. Разумеется, стабилизаторы могут иметь и другую форму, например, форму квадрата, треугольную с криволинейной передней кромкой, и т.д.
Помимо этого, стабилизатор 19а2 согласно настоящему изобретению оснащен, по меньшей мере, одной парой 22 закрылков 22.1 нижней поверхности крыла и закрылков 22.2 верхней поверхности крыла, сочлененных со стабилизатором по оси Y, по существу перпендикулярной оси Х2. Данная пара закрылков нижней и верхней поверхностей крыла носят название "закрылки крокодилового типа". Два закрылка 22.1, 22.2 нижней и верхней поверхностей крыла могут перемещаться из закрытого положения, в котором один закрылок находится по существу над другим так, что они образуют единый закрылок, в раскрытое положение, в котором два закрылка нижней поверхности крыла отделены от двух закрылков верхней поверхности крыла и находятся с разных сторон плоскости стабилизатора.
Когда закрылки верхней и нижней поверхностей крыла образуют один закрылок, они выполняют функцию установки глубины, обеспечивающую продольную устойчивость, а когда они разделены - выполняют функцию торможения.
В качестве варианта функции торможения и установки глубины могут быть разделены. Например, закрылки уменьшенного размера нижней и верхней поверхностей крыла можно разместить в центре стабилизатора, а два закрылка для установки глубины с целью обеспечения продольной стабилизации могут быть установлены на любой стороне закрылков нижней и верхней поверхностей крыла.
В рассматриваемом способе осуществления изобретения стабилизаторы 19а2, 19b2 оснащены двумя парами закрылков 22 нижней и верхней поверхностей крыла.
Перемещения стабилизаторов и закрылков верхней и нижней поверхностей крыла могут осуществляться с помощью любых известных устройств, например, с помощью пневматических, гидравлических или электрических исполнительных механизмов.
На взлете стабилизаторы могут быть либо расположены в одной плоскости с крыльями, либо отклонены относительно закрылков на угол, например, 90°.
Как будет объяснено ниже в описании функционирования модуля согласно настоящему изобретению, предпочтительно, чтобы обеспечивался быстрый запуск двигателя или двигателей 20, например, турбореактивных двигателей (ТРД). Для этого преимущественно на приводном валу турбореактивного двигателя или двигателей используется дополнительный источник энергии, например, термобатарея, с целью снабжения энергией электростартера высокой мощности, способного привести во вращение с ускорением валов ТРД. Крутящий момент стартера передается на вспомогательный вал ТРД. Предпочтительно производить замену термобатареи после каждого полета.
Модуль 14 соединен с невозвращаемой частью 16 с помощью известных приспособлений, например, фланцев.
Модуль 14 обладает высокой собственной пассивной устойчивостью, т.е. при полете со скоростью от сверхзвуковой до М=0,8 модуль 14 автоматически встает в положение носовой частью вперед в направлении падения. Таким образом, когда модуль и невозвращаемая часть отделяются друг от друга нештатным образом, модуль снова автоматически примет свое устойчивое положение без необходимости применения каких-либо специальных средств для обеспечения такого изменения положения.
Теперь мы рассмотрим различные этапы полета модуля согласно изобретению с помощью Фиг.6А-6F и 7.
В своей исходной конфигурации, показанной на Фиг.2, ракета-носитель включает в себя первую ступень 4, вторую ступень 6, содержащую полезную нагрузку и носовой обтекатель. Первая ступень включает в себя модуль 14 и заполненные баки. В показанной конфигурации каждый из стабилизаторов 19а2 и 19b2 может быть расположен по существу в плоскости крыла 19а1,19b1, соответственно.
Ракета-носитель с модулем 14 взлетает вертикально, приводимая в движение криогенными двигателями, снабжаемыми топливом из баков, размещенных в невозвращаемой части; эта часть полета соответствует этапу I. На высоте приблизительно 50 км первая ступень 4 отсоединяется от второй ступени 6; это происходит на скорости около М=5. Начиная с этого момента, модуль 14 прикреплен только к бакам, что соответствует этапу II траектории полета, схематично представленной на Фиг.7.
После отделения от второй ступени первая ступень 4 продолжает перемещаться по суборбитальной баллистической траектории (этап III) до тех пор, пока она не покинет атмосферу Земли.
Затем модуль 14 отделяется от невозвращаемой части 16; динамическое давление при этом является очень низким, порядка 20 Па (этап IV).
Разделение модуля 14 и невозвращаемой части 16 осуществляется преимущественно в направлении, перпендикулярном плоскости траектории Р, находящейся в плоскости страницы на Фиг.7, чтобы обеспечить удовлетворительное отведение модуля 14 от невозвращаемой части 16. С этой целью, перед отделением первую ступень ориентируют таким образом, чтобы ее продольная ось располагалась по существу перпендикулярно плоскости траектории P; это делается с помощью систем пространственной стабилизации. Когда первая ступень 6 правильно ориентирована, разделение модуля 14 и невозвращаемой части 16 осуществляется с помощью известных средств, например, аналогичных используемым при отделении первой ступени от второй ступени. Поскольку плотность модуля 14 намного больше плотности невозвращаемой части 16, он будет падать быстрее и дальше. Кроме того, как указывалось выше, благодаря своей собственной устойчивости, будет автоматически ориентироваться таким образом, чтобы его носовая часть была направлена вниз, как показано на Фиг.6а.
Падение модуля 14 происходит по баллистической траектории, как показано на Фиг.6а. На данном этапе падения стабилизаторы 19а2, 19b2 при необходимости будут поворачиваться относительно оси Х2, для того, чтобы обеспечить необходимое положение стабилизации во время полета в атмосфере.
В точке V модуль 14, как показано на Фиг.6b, производит автоматический повторный вход в атмосферу по баллистической траектории с нулевым углом атаки и нулевым углом бокового скольжения, закрылки 22 верхней и нижней поверхностей крыла каждой пары отходят друг от друга и устанавливаются под углом относительно плоскости стабилизатора и крыла, чтобы создать значительную поверхность торможения и стабилизации.
Закрылки 22 верхней и нижней поверхностей крыла удерживаются в раскрытом положении до тех пор, пока модуль 14 не достигнет дозвуковой скорости, близкой М=0,85; соответствующая данной скорости высота составляет приблизительно 10 км (точка VI на графике траектории полета). Можно показать, что данная скорость по существу всегда соответствует высоте приблизительно 10 км для различных условий набора высоты первой ступени и различных значений баллистического коэффициента модуля 14.
В точке VI на Фиг.6с, то есть на высоте около 10 км, закрылки верхней и нижней поверхностей крыла закрываются, образуя единый закрылок, создающий сваливающий момент, приводя в действие, таким образом, имеющиеся вспомогательные средства. Данное приведение в действие имеющихся вспомогательных средств производится при поперечной перегрузке приблизительно 2,5g. Выключение имеющихся вспомогательных средств производится, например, на высоте около 2500 м.
Затем быстро производится включение атмосферного движителя, например, турбореактивных двигателей, с помощью термобатареи для ТРД (в период времени между этапами полета, показанными соответственно на Фиг.6 с и Фиг.6D), немного ранее, чем произойдет выравнивание модуля (на Фиг.6D). С точки VII начинается фаза возвратного крейсерского полета; он происходит на дозвуковой скорости около М=0,3 на высоте приблизительно 3500 м. При этом может обеспечиваться последовательная коррекция для обеспечения оптимальной высоты крейсерского полета.
Данная фаза крейсерского полета заканчивается в точке VIII посадкой на обычную ВПП, преимущественно находящуюся недалеко от стартовой площадки, где производился запуск ракеты-носителя; на Фиг.6Е и 6F показаны соответственно этапы захода на посадку и посадки.
После посадки обычно производится выруливание ЛА в безопасную зону, где его снова приведут в готовность к следующему полету.
Преимущественно, посадка производится автоматически, а выруливание - автономно, в результате чего не происходит блокирования ВПП, что позволяет производить несколько последовательных посадок модулей, например, когда модули являются стартовыми ускорителями.
Разумеется, данный аппарат может возвращаться не только на площадку для запуска ракеты-носителя, которой он был оснащен.
Модуль согласно настоящему изобретению имеет сравнительно простую конструкцию и также сравнительно прост и надежен в эксплуатации.
На этапе крейсерского полета ориентацию стабилизаторов менять не обязательно, могут перемещаться лишь закрылки верхней и нижней поверхностей крыла.
Полет модуля может быть полностью автономным, или управляться дистанционно.
За счет отделения функций создания подъемной силы и стабилизации модуль освобождается от недостатков, присущих ЛА типа "летающее крыло".
Кили ракеты-носителя согласно настоящему изобретению, образующие аэродинамическую несущую поверхность модуля в соответствии с настоящим изобретением, не подвержены скручиванию, что обычно является проблемой при запуске ракеты-носителя и при повторном входе модуля в атмосферу.
Кроме того, конструкция данных килей проще и дешевле.
К тому же, в случае "летающего крыла" балансировка ЛА при выработке топлива из баков, а также обеспечение продольной и поперечной устойчивости достигаются с помощью ряда подвижных поверхностей, распределенных по передней кромке крыла, что приводит к необходимости введения сложной системы управления данными поверхностями. В предлагаемом изобретении устойчивость обеспечивается с помощью стабилизаторов 19а2,19b2, управление которыми гораздо проще.
Помимо этого, сдвинутое назад расположение стабилизаторов на законцовках крыла, во-первых, делает возможным установку на них закрылков верхней и нижней поверхностей крыла, во-вторых, значительно повысить волновое сопротивление, и, наконец, сместить назад аэродинамический фокус в области нулевого угла атаки и нулевого бокового скольжения.
Кроме того, сочетание крыла и стабилизаторов (конструкция, обычно применяемая на ЛА) повышает сопротивляемость к изменениям центровки, при этом, положение центра тяжести может изменяться в более широком диапазоне, что дает возможность балансировки данного модуля по схеме, аналогичной применяемой для обычных ЛА.
Помимо этого, преимущество модуля согласно настоящему изобретению заключается также в том, что он требует лишь незначительного изменения формы или угла отклонения стабилизатора, которое в потенциале может составлять лишь несколько десятых градуса или даже быть нулевым. Иными словами, перемещаемые поверхности уменьшаются. Это происходит благодаря тому, что ориентация стабилизаторов производится на этапе внеатмосферного полета, не пересекающемся с полетом модуля в атмосфере. Далее, при входе в атмосферу земли, предпочтительно производится перемещение лишь закрылков верхней и нижней поверхностей крыла, на первом этапе - для снижения скорости полета модуля, и на втором - для управления модулем во время крейсерского полета.
Такое ограниченное изменение формы создает преимущество, заключающееся в том, что обеспечивается возможность изменения конфигурации имеющихся вспомогательных средств при повышенном динамическом давлении и числе М, поскольку перемещаемые поверхности уменьшены, и, таким образом, требуется меньшая сила для их перемещения. Это дает возможность не использовать парашют, являющийся расходным элементом. Общие затраты, таким образом, еще более снижаются.
Кроме того, имеется степень свободы двугранного угла стабилизаторов, шарнирно установленных на законцовках крыла. Изменение их ориентации дает возможность корректировки характеристик модуля. Это обеспечивается тем, что, изменяя их ориентацию, можно регулировать продольное расположение центров по углам атаки и рыскания, а также изменять вертикальное положение центра по крену, создаваемому боковым скольжением.
С помощью настоящего изобретения, посадка, и, при необходимости, фазы перестройки, взлет модуля может производиться как обычно, с обеспеченным управлением человеком-пилотом, даже при боковом ветре.
Модуль 14 согласно настоящему изобретению составляет более 80% общей стоимости ракеты-носителя и приблизительно 60% инертной массы первой ступени. Естественно, составляемый модулем процент общей стоимости ракеты-носителя зависит от количества двигателей 20 в составе силовой установки. Поэтому использование модуля 14 существенно уменьшает эксплуатационные расходы новой ракеты-носителя.
Кроме того, затраты на разработку модуля 14 значительно сокращаются по сравнению с затратами на разработку полностью многоразовой первой ступени (приблизительно на 35%).
Предполагая, что с помощью настоящего изобретения двигатели ракеты-носителя за счет применения модуля 14 будут повторно использованы 10 раз, что соответствует полному сроку службы 2000 с, средние регулярные расходы первой ступени согласно настоящему изобретению при полном сроке службы модуля 100 полетов составят 25% затрат на соответствующую невозвращаемую ступень для тех же 100 полетов.
При этом предполагается, что будут созданы очень надежные двигатели, для того, чтобы максимизировать количество их повторных использований.
Таким образом, оказывается, что настоящее изобретение позволяет значительно сократить производственные и эксплуатационные затраты.
В соответствии с настоящим изобретением, в модуле используются известные, испытанные в области аэродинамики, технологии, и затраты на доводку и ее продолжительность, таким образом, также снижаются.
За счет настоящего изобретения, модуль 14 имеет высокую объемную плотность, так как он не включает в себя пустые баки, что упрощает управление им при возвращении на землю, а также программу возвращения.
Затупленная форма носовой части максимизирует волновое сопротивление при полете на сверхзвуковых скоростях.
Может быть предусмотрена дальнейшая оптимизация полного сопротивления модуля во время полета с дозвуковой скоростью при возвращении на землю путем оптимизации сопротивления корпуса модуля, учитывая, что данное сопротивление является основной составляющей общего сопротивления при полете на дозвуковой скорости. С этой целью может быть предусмотрено введение в конструкцию заднего конуса регулируемой геометрии, например, надуваемого на этапе торможения.
Фазы входа в атмосферу и создания аэродинамической подъемной силы при полете на дозвуковых скоростях предлагают множество степеней свободы для регулировки характеристик модуля. Частоту включения вспомогательных средств можно изменять; можно воздействовать на коэффициент поперечной перегрузки во время работы вспомогательных средств; кроме того, можно изменять высоту крейсерского полета модуля при возвращении на землю в зависимости от длины и расположения ВПП.
Многоразовый модуль 14 согласно настоящему изобретению может быть использован для ракет-носителей любых габаритов, от наноносителей до супертяжелых ракет-носителей. Данный модуль можно легко адаптировать для различных двигательных модулей, различных габаритных размеров ЛА и различных типов целевых заданий.
Модуль согласно настоящему изобретению был описан для случая двухступенчатой ракеты-носителя, но он применим также к одноступенчатым ЛА для создания летающей демонстрационной установки или лаборатории для проведения экспериментов в полете, имеющей, по меньшей мере, две ступени, в нижней из которых или в одной из верхних располагается модуль.
Естественно, вместе с закрылками верхней и нижней поверхностей крыла можно использовать один или несколько парашютов, в случае, если обеспечиваемое закрылками торможение окажется недостаточным.
В качестве варианта может быть использован модуль, содержащий жесткие крылья со стабилизаторами, торможение которого вместо закрылков крокодилового типа будет обеспечиваться парашютом.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОРАЗОВЫЙ УСКОРИТЕЛЬ ПЕРВОЙ СТУПЕНИ РАКЕТЫ-НОСИТЕЛЯ | 1999 |
|
RU2148536C1 |
| МНОГОРАЗОВЫЙ УСКОРИТЕЛЬ РАКЕТЫ-НОСИТЕЛЯ | 2006 |
|
RU2321526C1 |
| СПОСОБ ОБСЛУЖИВАНИЯ КОСМИЧЕСКИХ ОБЪЕКТОВ И МНОГОРАЗОВАЯ АВИАЦИОННО-КОСМИЧЕСКАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2342288C1 |
| МНОГОРАЗОВЫЙ РАКЕТНО-АВИАЦИОННЫЙ МОДУЛЬ И СПОСОБ ЕГО ВОЗВРАЩЕНИЯ НА КОСМОДРОМ | 2010 |
|
RU2442727C1 |
| СИСТЕМА ЗАПУСКА И ТРАНСПОРТИРОВАНИЯ ПОЛЕЗНОЙ НАГРУЗКИ | 1999 |
|
RU2233772C2 |
| МНОГОРАЗОВАЯ ВОЗДУШНО-КОСМИЧЕСКАЯ СИСТЕМА | 1999 |
|
RU2164882C1 |
| РАКЕТА-НОСИТЕЛЬ | 2011 |
|
RU2482030C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ СО СМЕШАННЫМ РЕЖИМОМ АЭРОДИНАМИЧЕСКОГО И КОСМИЧЕСКОГО ПОЛЕТА И СПОСОБ ЕГО ПИЛОТИРОВАНИЯ | 2007 |
|
RU2441815C2 |
| РАКЕТНЫЙ БЛОК МНОГОРАЗОВОГО ИСПОЛЬЗОВАНИЯ | 1993 |
|
RU2053168C1 |
| РАКЕТА-НОСИТЕЛЬ, ВОЗВРАЩАЕМАЯ СТУПЕНЬ РАКЕТЫ-НОСИТЕЛЯ И СПОСОБ ЕЕ ЗАПУСКА ПРИ ВОЗВРАЩЕНИИ И СИСТЕМА ВЕРТОЛЕТНОГО ПОДХВАТА ВОЗВРАЩАЕМОЙ СТУПЕНИ | 2015 |
|
RU2609539C1 |




Изобретение относится к космической технике и может быть использовано в многоразовых модулях. Ракета-носитель типа от наноносителя до супертяжелой содержит две ступени с отсеком с двигательной установкой и невозвращаемой частью с баком с топливом, боковыми ускорительными ступенями, многоразовым модулем с центральным корпусом, силовой установкой для запуска летательного аппарата, системой командования и управления силовой установкой, двигательными средствами в виде атмосферных тяговых двигателей или турбореактивных двигателей с дополнительным источником энергии для быстрого запуска в виде термобатареи со стартером для полета с дозвуковой скоростью, аэродинамическими несущими поверхностями, сформированными хвостовым оперением, с плоскими крыльями, стабилизаторами с парой закрылков и средствами продольной стабилизации для полета с дозвуковой скоростью, посадочными шасси, затупленной носовой частью. Отделяют многоразовый модуль от невозвращаемой части в перпендикулярном направлении плоскости траектории полета, осуществляют свободное падение многоразового модуля, открывают пару закрылков нижней и верхней поверхностей крыла и удерживают их в открытом положении до достижения требуемой скорости, изменяют положения стабилизаторов для корректировки этапа полета, закрывают пару закрылков нижней и верхней поверхностей крыла для образования единого закрылка, устанавливают закрылки верхней и нижней поверхностей крыла для создания отклоняющего момента, запускают тяговые двигатели, осуществляют крейсерский полет к месту запуска, осуществляют автоматическое выруливание и торможение для посадки. Изобретение позволяет выводить полезную нагрузку с использованием любых типов ракет-носителей. 4 н. и 14 з.п. ф-лы, 12 ил.
1. Многоразовый модуль для отсека с двигательной установкой, выполненный с возможностью запуска летательного аппарата в космос, содержащий по меньшей мере одну ступень, при этом многоразовый модуль имеет продольную ось (X1) и соединен в течение запуска с невозвращаемой частью (16), при этом указанный многоразовый модуль (14) содержит центральный корпус, силовую установку (8) для запуска летательного аппарата, системы командования и управления силовой установкой, двигательные средства (20) для полета с дозвуковой скоростью, аэродинамические несущие поверхности для полета с дозвуковой скоростью и посадочное шасси (30), причем аэродинамическая несущая поверхность содержит два по существу плоских крыла (19а1, 19b1), прикрепленных с обеих сторон к центральному корпусу модуля, и стабилизатор (19а2, 19b2), установленный с возможностью отклонения при повороте на законцовках каждого крыла (19а1, 19b1), причем каждый стабилизатор содержит по меньшей мере одну пару закрылков (22) верхней и нижней поверхностей крыла, установленных с возможностью поворота на каждом стабилизаторе (19а2, 19b2) так, чтобы они отходили друг от друга и устанавливались по обе стороны от средней плоскости стабилизатора (19а2, 19b2), осуществляя торможение модулей, или соединялись и упирались друг в друга, образуя единый стабилизатор, и средства продольной стабилизации, при этом указанный многоразовый модуль (14) предназначен для установки в нижней части указанной ступени, причем невозвращаемая часть содержит по меньшей мере один бак для снабжения топливом силовой установки, причем указанные многоразовый модуль (14) и невозвращаемая часть (16) выполнены с возможностью отделения друг от друга, когда отсек с двигательной установкой достигает заданной высоты, при этом многоразовый модуль (14) выполнен с возможностью совершения управляемой посадки после осуществления им крейсерского полета, например, с целью возврата на место запуска.
2. Многоразовый модуль по п.1, в котором средства продольной стабилизации образованы закрылками нижней и верхней поверхностей крыла, когда эти закрылки образуют только один закрылок.
3. Многоразовый модуль по п.1 или 2, в котором несущие аэродинамические поверхности сформированы хвостовым оперением (10) данного летательного аппарата.
4. Многоразовый модуль по п.1 или 2, в котором стабилизаторы (19а2, 19b2) выполнены с возможностью отклонения при повороте относительно оси, по существу параллельной продольной оси (X1) модуля.
5. Многоразовый модуль по п.1 или 2, в котором отклонение закрылков при повороте осуществляется с помощью цилиндрического или шарнирного соединения.
6. Многоразовый модуль по п.1 или 2, в котором двигательные средства представляют собой атмосферные тяговые двигатели (20), установленные в корневых частях крыльев (19а1, 19b1).
7. Многоразовый модуль по п.1 или 2, который, если двигательные средства представляют собой один или несколько турбореактивных двигателей, содержит дополнительный источник энергии для быстрого запуска турбореактивного двигателя или двигателей.
8. Многоразовый модуль по п.7, в котором дополнительный источник энергии для быстрого запуска турбореактивного двигателя или двигателей представляет собой термобатарею, снабжающую энергией стартер турбореактивного двигателя или двигателей.
9. Многоразовый модуль по п.1 или 2, содержащий затупленную носовую часть (21).
10. Отсек с двигательной установкой, предназначенный для запуска летательного аппарата в космос, содержащий по меньшей мере одну ступень (4), содержащую по меньшей мере один многоразовый модуль (14) по любому из пп.1-9 и невозвращаемую часть, содержащую по меньшей мере один бак (12, 13) для снабжения топливом силовой установки (8).
11. Отсек по п.10, содержащий боковые ускорительные ступени, по меньшей мере одна из которых содержит многоразовый модуль по любому из пп.1-9.
12. Ракета-носитель, оборудованная отсеком с двигательной установкой по п.10 или 11, содержащая по меньшей мере две ступени (14, 16), одна из которых образована отсеком с двигательной установкой, а другая предназначена для транспортировки полезной нагрузки, причем указанные две ступени являются разделяемыми.
13. Ракета-носитель по п.12 любого типа от наноносителя до супертяжелой ракеты-носителя.
14. Ракета-носитель по п.13, в которой отсек с двигательной установкой образует нижнюю ступень ракеты-носителя или одну из верхних ступеней.
15. Способ возвращения на землю многоразового модуля по любому из пп.1-9, включающий в себя следующие этапы:
а) отделение многоразового модуля (14) от невозвращаемой части,
b) свободное падение многоразового модуля (14),
c) при входе в атмосферу открытие пар закрылков (22) нижней и верхней поверхностей крыла и удержание их в открытом положении до достижения требуемой скорости,
d) закрытие пар закрылков (22) нижней и верхней поверхностей крыла, в результате чего каждая пара образует единый закрылок,
e) включение имеющихся вспомогательных средств путем установки закрылков (22) верхней и нижней поверхностей крыла в положение, при котором они создают отклоняющий момент,
f) запуск как минимум одного тягового двигателя (20) при полете с дозвуковой скоростью в конце периода использования имеющихся вспомогательных средств,
g) крейсерский полет к месту запуска и
h) посадку.
16. Способ по п.15, в котором посадка является автоматической и после нее производится автоматическое выруливание и торможение.
17. Способ по п.15 или 16, содержащий перед этапом вхождения в атмосферу этап изменения положения стабилизаторов (19а2, 19b2) и, при необходимости, корректировку этапа полета.
18. Способ по п.15 или 16, в котором во время этапа а) отделение многоразового модуля (14) от невозвращаемой части происходит в направлении, по существу перпендикулярном плоскости траектории полета.
| Реактивная турбина внутреннего горения | 1931 |
|
SU31718A1 |
| МНОГОРАЗОВЫЙ УСКОРИТЕЛЬ ПЕРВОЙ СТУПЕНИ РАКЕТЫ-НОСИТЕЛЯ | 1999 |
|
RU2148536C1 |
| US 6612522 B1, 02.09.2003 | |||
| US 8047472 B1, 01.11.2011. | |||

