ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к элементу захвата изображения, имеющему слоистую структуру, устройству захвата изображения, включающему в себя элемент захвата изображения, и к способу и программе для управления им. В частности, настоящее изобретение относится к устройству захвата изображения, которое способно определять значение оценки для фотометрии, измерения расстояния и так далее в соответствии с сигналом изображения.
ОПИСАНИЕ ПРЕДШЕСТВУЮЩЕГО УРОВНЯ ТЕХНИКИ
Существует методика для оценки и отображения изображения путем использования сигнала, захваченного с помощью устройства захвата изображения. Устройство, описанное в выложенной японской заявке на патент №2009-89105, описывает режим считывания при визировании по экрану и режим считывания с определением фокусировки и автоматической экспозиции. Режим считывания при визировании по экрану служит для считывания сигнала захвата изображения для отображения для визирования по экрану, в то время как режим считывания с автоматической экспозицией и определением фокуса предназначен для считывания с элемента захвата изображения, сигнала захвата изображения, который используется для сигнала для определения фокуса и фотометрической информации для автоматической экспозиции. Эти режимы считывания циклически повторяются при каждом кадре.
Тем не менее, так как, согласно выложенной японской заявке на патент No. 2009-89105 сигнал изображения (т.е., заряд) считывается с элемента захвата изображения на пиксельной основе, не только требуется больше времени для переноса заряда, но и объем данных переноса также увеличен, что увеличивает энергопотребление.
Далее, сигнал изображения, получаемый на выходе элемента захвата изображения, подвергается обработке сигнала изображения, выполняемой иным устройством, таким, как контроллер. Соответственно, большой объем данных переноса вызывает увеличение нагрузки при обработке на контроллер.
В дополнение, в выложенной японской заявке на патент No. 2009-89105 описывается блок пикселей, включающий в себя пиксели обнаружения сигнала фокусировки, что неизбежно уменьшает область, выделенную под пиксели для сигнала захвата изображения. Так как пиксели обнаружения сигнала фокусировки, не используются при получении сигнала захвата изображения (сигнала изображения), качество изображения ухудшается.
Соответственно, задачей настоящего изобретения является предоставление элемента захвата изображения и устройства захвата изображения, которые уменьшают время переноса данных и устраняют потерю качества изображения, и способа и программы для управления им.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Для того, чтобы выполнить вышеуказанную задачу, согласно изобретению, элемент захвата изображения для захвата оптического изображения, на котором он сфокусирован, и вывода сигнала изображения, соответствующего оптическому изображению, содержит: первое средство элемента, содержащее множество пикселей, расположенных в виде матрицы, для вывода сигнала напряжения, соответствующего оптическому изображению; и второе средство элемента для преобразования сигнала напряжения в цифровой сигнал для получения сигнала изображения, причем второе средство элемента содержит: средство генерации управляющей информации для генерации управляющей информации, подлежащей использованию для захвата изображения в соответствии с первым сигналом изображения, который является сигналом изображения, полученным от первой группы пикселей среди множества пикселей, и средство вывода для вывода в качестве сигнала отображения изображения для отображения изображения, второго сигнала изображения, который является сигналом изображения, полученный от второй группы пикселей среди множества пикселей. Обеспечен элемент захвата изображения согласно любому из п.п. 1-5 формулы изобретения.
В другом аспекте изобретения, устройство захвата изображения содержит: описанный выше элемент захвата изображения, средство управления для управления, при получении управляющей информации, захватом изображения в соответствии с управляющей информацией; и средство управление отображением для осуществления отображения для визирования по экрану в соответствии с сигналом отображения изображения.
Дополнительные признаки настоящего изобретения станут очевидны из нижеследующего описания вариантов выполнения со ссылкой на приложенные чертежи
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг. 1 является блок-схемой, иллюстрирующей конфигурацию одного из одного примера устройства захвата изображения по первому варианту выполнения настоящего изобретения.
Фиг. 2А и 2В являются поясняющими видами, иллюстрирующими конфигурацию элемента захвата изображения, показанного на Фиг.1.
Фиг. 3 является поясняющим видом, иллюстрирующим выбор пикселей в сигнальных линиях столбца на первой микросхеме, проиллюстрированной на Фиг. 2А и 2В.
Фиг. 4 является диаграммой тактирования для описания тактирования захвата изображения в режиме оценки автоматической фокусировки в камере, изображенной на Фиг. 1.
Фиг. 5 является блок-схемой последовательности операций для описания управления в камере, изображенной на Фиг. 1.
Фиг. 6 является блок-схемой, иллюстрирующей конфигурацию одного примера элемента захвата изображения, предназначенного для использования в камере в соответствии со вторым вариантом выполнения настоящего изобретения.
Фиг. 7 является диаграммой тактирования для описания тактирования захвата изображения в режиме оценки фотометрии по второму варианту выполнения настоящего изобретения.
Фиг. 8 является блок-схемой, иллюстрирующей конфигурацию одного примера элемента захвата изображения для использования в камере в соответствии с третьим вариантом выполнения настоящего изобретения.
Фиг. 9 является диаграммой тактирования для описания тактирования захвата изображения в режиме оценки стандартного отклонения по третьему варианту выполнения настоящего изобретения.
Фиг. 10 является поясняющим видом, иллюстрирующим тактирование операции захвата изображения для автоматической фокусировки для визирования по экрану в обычном устройстве захвата изображения.
Фиг. 11 является блок-схемой, иллюстрирующей конфигурацию устройства захвата изображения по четвертому варианту выполнения настоящего изобретения.
Фиг. 12А и 12В иллюстрируют конфигурацию элемента захвата изображения, включенного в устройство захвата изображения по четвертому варианту выполнения настоящего изобретения.
Фиг. 13 является поясняющим видом, показывающим конфигурацию считывания блока пикселей в элементе захвата изображения, подлежащем использованию в устройстве захвата изображения по четвертому варианту выполнения настоящего изобретения.
Фиг. 14А и 14В показывают тактирование захвата изображения устройства захвата изображения по четвертому варианту выполнения настоящего изобретения.
Фиг. 15 является блок-схемой последовательности операций, иллюстрирующей функционирование в режиме автоматической фокусировки в устройстве захвата изображения по четвертому варианту выполнения настоящего изобретения.
Фиг. 16 иллюстрирует конфигурацию устройства захвата изображения по пятому варианту выполнения настоящего изобретения.
Фиг. 17 является блок-схемой последовательности операций, иллюстрирующей функционирование в режиме автоматической фокусировки в устройстве захвата изображения по пятому варианту выполнения настоящего изобретения.
Фиг. 18 является таблицей определения, показывающей определение композиции в устройстве захвата изображения по пятому варианту выполнения настоящего изобретения.
Фиг. 19 иллюстрирует конфигурацию устройства захвата изображения по шестому варианту выполнения настоящего изобретения.
ОПИСАНИЕ ВАРИАНТОВ ВЫПОЛНЕНИЯ
Различные варианты выполнения, признаки и аспекты настоящего изобретения будут подробно описаны ниже со ссылкой на чертежи. Один пример устройства захвата изображения по вариантам выполнения настоящего изобретения будет описан ниже со ссылкой на чертежи.
ПЕРВЫЙ ВАРИАНТ ВЫПОЛНЕНИЯ
Фиг. 1 представляет собой блок-схему, иллюстрирующую конфигурацию одного примера устройства захвата изображения по первому варианту выполнения настоящего изобретения.
Например, показанное устройство захвата изображения применяется к цифровой фотокамере с функцией движущегося изображения или видеокамере.
Устройство 100 захвата изображения имеет оптический тубус 101, элемент 102 захвата изображения, блок 103 привода, блок 104 обработки сигналов, блок 105 сжатия-развертывания, блок 106 управления, блок 107 излучения света, функциональный блок 108, блок 109 отображения изображения, и блок 110 записи изображения.
Оптический тубус 101 включает в себя блок линз (не приведен на иллюстрации, здесь и в дальнейшем называется объектив) и механическо-оптический блок 1011. Объектив концентрирует (т.е., изображает) свет от объекта (оптическое изображение) на элементе 102 захвата изображения.
Несмотря на то, что это не показано на иллюстрациях, механическо-оптический блок 1011 включает в себя механизм автоматической фокусировки, механизм привода трансфокации и механизм диафрагмы. Блок 1011 механизма оптики приводится в движение блоком 103 привода под управлением блока 106 управления.
Элемент 102 захвата изображения имеет блок пикселей 201, который будет описан позже, и аналого-цифровой преобразователь (не приведен на иллюстрации). Например, элемент 102 захвата изображения является так называемым КМОП-датчиком изображений XY-типа. Элемент 102 захвата изображения выполняет операцию захвата изображения, такую, как экспозиция, считывание сигнала и сброс, с помощью блока 103 привода, который действует под управлением блока 106 управления. Элемент 102 захвата изображения также выдает сигнал захвата изображения (также называемый сигналом изображения).
Элемент 102 захвата изображения имеет блок 1021 определения значения оценки автоматической фокусировки. Блок 1021 определения значения оценки автоматической фокусировки определяет значение оценки AF (автоматической фокусировки) с тактированием, управляемым блоком 106 управления, на основании информации о контрасте и информации о разности фаз, полученной в соответствии с сигналом изображения, полученным от элемента 102 захвата изображения. Блок 1021 определения значения оценки автоматической фокусировки передает значение оценки автоматической фокусировки блоку 106 управления.
Под управлением блока 106 управления блок 104 обработки сигнала выполняет обработку сигнала, такую, как обработка настройки баланса белого, обработка коррекции цвета и обработка автоматической экспозиции (AE) сигнала изображения, выведенного из элемента 102 захвата изображения, и выдает сигнал изображения в виде данных изображения.
Блок 105 сжатия-развертывания, который действует под управлением блока 106 управления, осуществляет над данными изображения, являющимися выводом из блока 104 обработки сигнала, процесс кодирования со сжатием в заданный формат данных фотографического изображения, такой, как способ JPEG (Joint Photographic Experts Group, Объединенная группа экспертов по фотографии). Блок 105 сжатия-развертывания также осуществляет процесс декодирования с развертыванием закодированных данных изображения, отправленных из блока 106 управления.
Блок 105 сжатия-развертывания может также выполнять процессы кодирования со сжатием/декодирования с развертыванием путем использования способа MPEG (Moving Picture Experts Group, Группа Экспертов по Движущемуся Изображению).
Блок 106 управления является микроконтроллером, включающим в себя, например, центральный процессор (ЦП, CPU), постоянное запоминающее устройство (ROM), оперативное запоминающее устройство (RAM). ЦП выполняет программу, сохраненную в ROM так, чтобы полностью управлять всем устройством 100 захвата изображения.
Когда определяется, что значение экспозиции объекта низкое в следствие обработки автоматической экспозиции, производимой блоком 104 обработки сигнала, блок 107 излучения света излучает свет для того, чтобы подсветить объект. Например, в качестве блока 107 излучения света может быть использовано стробоскопическое устройство, использующее ксеноновую лампу или светоизлучающий прибор на основе светодиодов.
Например, функциональный блок 108 имеет различные функциональные клавиши, рычаги и диски, такие, как кнопка спуска затвора, для того, чтобы передать блоку 106 управления управляющий сигнал, соответствующий действиям пользователя по вводу.
Блок 109 отображения изображения включает в себя, например, устройство отображения, такое, как жидкокристаллический дисплей (LCD), и интерфейсную схему для жидкокристаллического экрана, и отображает, на устройстве отображения, изображения, соответствующие данным изображения, направленным от блока 106 управления.
Блок 110 записи изображения является, например, носителем записи, таким, как портативное полупроводниковое запоминающее устройство, оптический диск, жесткий диск (HDD) или магнитная пленка для хранения данных об изображении, которые были сжаты путем кодирования блоком 105 сжатия-развертывания, в качестве файла с изображением. Блок 110 записи изображения также считывает файл с изображением, указанный блоком 106 управления, и выдает его блоку 106 управления.
Далее следует описание основных операций устройства 100 захвата изображения, проиллюстрированного на Фиг. 1.
Например, в случае фотографирования неподвижного изображения, в качестве подготовки к захвату изображения, выводимые из пикселей 201 сигналы изображения последовательно подвергаются обработке CDS и AGC в элементе 102 захвата изображения. После этого сигналы изображения преобразуются в цифровые сигналы изображения в аналого-цифровом преобразователе. Полученные цифровые сигналы изображения выводятся в блок 1021 определения значения оценки автоматической фокусировки и в блок 104 обработки сигналов.
Блок 1021 определения значения оценки автоматической фокусировки высчитывает значение оценки автоматической фокусировки (управляющую информацию) в соответствии с информацией о контрасте, полученной от цифровых сигналов изображения, и выводит значение оценки автоматической фокусировки в блок 106 управления. Блок 106 управления определяет величину управления для механическо-оптического блока 1011 на основании значения оценки автоматической фокусировки, и управляет блоком 103 привода в соответствии с величиной управления. Как следствие этого, механическо-оптический блок 1011 приводится в движение блоком 103 привода.
Блок 104 обработки сигнала применяет к вышеописанному цифровому сигналу изображения, например, обработку коррекции качества изображения, для генерации сигнала прошедшего через камеру изображения, и отправляет сигнал прошедшего через камеру изображения, на блок 109 отображения изображения через блок 106 управления. Как следствие этого, блок 109 отображения изображений может отображать прошедшее через камеру изображение, соответствующее сигналу прошедшего через камеру изображения, так что пользователь может осуществить настройку угла изображения во время показа прошедшего через камеру изображения.
Когда кнопка спуска затвора функционального блока 108 не нажата в таком состоянии, сигнал захваченного изображения (цифровой сигнал изображения) одного из кадров с элемента 102 захвата изображения передается в блок 104 обработки сигналов под управлением блока 106 управления. Блок 104 обработки изображений осуществляет обработку коррекции качества изображения цифрового сигнала изображения одного кадра, и пересылает обработанный цифровой сигнал изображения (данные изображения) в блок 105 сжатия-развертывания.
Блок 105 сжатия-развертывания осуществляет кодирование данных изображения со сжатием и пересылает закодированные данные изображения в блок 110 записи изображений через блок 106 управления. Как следствие этого, файл с изображением, относящийся к захваченному неподвижному изображению, записывается в блок 110 записи изображений.
В случае воспроизведения файла изображения, находящегося в блоке 110 записи изображений, блок 106 управления считывает файл с изображением, выбранный в соответствии с управляющим вводом от функционального блока 108, из блока 110 записи изображений. После этого блок 106 управления пересылает файл с изображением в блок 105 сжатия-развертывания, где выполняется процесс декодирования с развертыванием.
Декодированные данные изображения направляются в блок 109 отображения изображения через блок 106 управления. Как следствие этого, неподвижное изображение, соответствующее данным изображения, воспроизводится и отображается на блоке 109 отображения изображений.
В случае записи данных движущегося изображения, цифровые сигналы изображения, выводимые с элемента 102 записи изображения под управлением блока 106 управления, передаются в блок 104 обработки сигналов. Данные изображений, обработанные в порядке очереди в блоке 104 обработки сигналов, подвергаются процессу кодирования со сжатием в блоке 105 сжатия-развертывания. После этого, закодированные данные движущегося изображения перенаправляются в порядке очереди из блока 105 сжатия-развертывания в блок 110 записи изображений, где данные записываются в виде файла движущегося изображения.
В случае воспроизведения файла движущегося изображения, записанного в блоке 110 записи изображений, блок 105 управления считывает выбранный файл движущегося изображения с блока 110 записи в соответствии с управляющим вводом от функционального блока 108. После этого, блок 106 управления пересылает файл движущегося изображения в блок 105 сжатия-развертывания, где выполняется процесс декодирования с развертыванием. Декодированные данные движущегося изображения направляются в блок 109 отображения изображений через блок 106 управления. Как следствие этого, движущееся изображение, соответствующее данным движущегося изображения, воспроизводится и отображается на блоке 109 отображения изображений.
Далее описана методика для отображения изображения отображения во время расчета значения оценки из захваченного изображения в обычном устройстве захвата изображения вместе с относящейся к нему проблемой. Для получения информации о позиции объекта для использования в целях управления фокусом в обычном устройстве захвата изображения, информация о позиции получается в соответствии с сигналами изображения, выводимыми из элемента захвата изображения. Информация о позиции также получается посредством прямого ввода оптических сигналов от объекта в выделенный детектор с использованием разности фаз в изображениях, указанных оптическими сигналами. В случае если информация о позиции получается в соответствии с сигналами изображения, устройство захвата изображения может быть уменьшено в размерах, потому что выделенный детектор не нужен.
Фиг. 10 является поясняющим видом, иллюстрирующим тактирование операции захвата изображения с автоматической фокусировкой (захват изображения с оценкой автоматического фокусирования) для визирования по экрану в обычных устройствах захвата изображения.
В обычном устройстве захвата изображения тактирование захвата изображения обусловлено сигналом вертикальной синхронизации (вертикальный возбуждающий импульс, VD). Когда управляющий сигнал автоматической фокусировки включен, изображение для оценки автоматической фокусировки захватывается в соответствии с вертикальным возбуждающим импульсом после периода захвата визирования по экрану. Когда сигнал управления автоматической фокусировкой выключен, период захвата изображения в режиме визирования по экрану начинается вновь.
В этом случае, так как период для захвата изображения в режиме визирования по экрану и период работы автоматической фокусировки для получения изображений для оценки автоматической фокусировки последовательно находятся вдоль временной оси, изображение для визирования по экрану и изображение для оценки автоматической фокусировки не могут быть захвачены одновременно.
По этой причине, изображения для оценки автоматической фокусировки захватываются во время периода работы автоматической фокусировки, расположенного между периодами (кадрами) визирования по экрану, как было проиллюстрировано. В результате появляется задержка во времени между изображениями для визирования по экрану и изображениями для оценки автоматической фокусировки.
В дополнение к этому, несмотря на то, что отображение для визирования по экрану выполняется даже во время захвата изображения для оценки автоматической фокусировки, визирование по экрану в этом случае осуществляется в соответствии с изображением для оценки автоматической фокусировки. Как проиллюстрировано на Фиг. 10, когда изображение для оценки автоматической фокусировки захвачено, частота кадров повышается по сравнению с периодом захвата изображения в режиме визирования по экрану. Это увеличивает промежуток между кадрами при считывании с элемента захвата изображения, приводя к неизбежному падению качества изображения. Для того, чтобы избежать такой проблемы, некоторые элементы захвата изображения имеют блок пикселей, в котором, например, пиксели для определения сигнала фокусировки представлены отдельно от пикселей для сигнала захвата изображения.
Ввиду вышеописанной проблемы, настоящий вариант выполнения представляет элемент 102 захвата изображения, как показано на Фиг. 2А и 2В. Элемент 102 захвата изображения выполнен с возможностью генерации, параллельно сигналам изображения для отображения, значения оценки, полученного от сигналов изображения или управляющей информации, основанной на оценочном значении для того, чтобы сократить время обработки и уменьшить нагрузку, связанную с обработкой.
Фиг. 2А и 2В являются поясняющими видами, иллюстрирующими конфигурацию элемента 102 захвата изображения, проиллюстрированного на Фиг. 1. Фиг. 2А является видом в перспективе, иллюстрирующим структуру элемента 102 захвата изображения, в то время как Фиг. 2В является блок-схемой, иллюстрирующей его конфигурацию.
На Фиг. 2А, элемент 102 захвата изображения имеет первую микросхему (блок пикселей) 20 и вторую микросхему 21. Первая микросхема (первый блок элемента) 20 расположена слоем поверх второй микросхемы (второго блока элемента) 21. Первая микросхема 20, которая имеет множество пикселей 201, расположенных форме матрицы, помещена со стороны падения света (иными словами, расположена со стороны, получающей оптическое изображение).
Вторая микросхема 21 имеет блок возбуждения пикселей, включающий в себя сформированные на нем схемы 213-а и 213-b сканирования столбцов и схему 212 сканирования строк, которые будут описаны позднее.
Вышеупомянутый блок 1021 определения значения оценки автоматической фокусировки (блок генерации управляющей информации) также сформирован на второй микросхеме 21.
Так как пиксели 201 сформированы на первой микросхеме 20, а блок возбуждения пикселей и блок 1021 определения значения оценки автоматической фокусировки сформированы на второй микросхеме 21 таким образом, процесс производства периферийных схем и блока пикселей элемента 102 захвата изображения могут быть разделены. В результате, тенденция к сужению ширины разводки и сильному увеличению плотности разводки в периферийных схемах может привести к улучшению скорости, уменьшению размеров и более высокой производительности.
Как проиллюстрировано на Фиг. 2В, пиксели 201 расположены в форме матрицы на первой микросхеме 20. Каждый из пикселей 201 соединен с сигнальной линией 203 переноса, сигнальной линией 204 сброса и сигнальной линией 205 выбора строки в горизонтальном направлении (направление строки), а также он соединен с сигнальными линиями 202-а и 202-b столбца в вертикальном направлении (направлении столбцов). Необходимо заметить, что сигнальные линии 202-а и 202-b столбца отличаются друг от друга в связи с назначением на основе строки, которая должна быть считана.
Как изображено на иллюстрации, каждый из пикселей 201 имеет фотодиод (PD), который является элементом фотоэлектрического преобразования, транзистор M1 переноса, транзистор M2 сброса, транзистор M3 усиления, транзистор M4 выбора и плавающую диффузионную область FD.
На проиллюстрированном примере, каждый из транзисторов является полевым МОП-транзистором с каналом n-типа.
Затворы транзистора M1 переноса, транзистора M2 сброса и транзистора M4 выбора присоединены к сигнальной линии 203 переноса, сигнальной линии 204 сброса и к сигнальной линии 205 выбора строки, соответственно. Эти сигнальные линии от 203 до 205 выполнены продолжительно в горизонтальном направлении, и пиксели в том же ряду приводятся в действие одновременно. Таким образом, можно управлять операцией сворачивания затвора с типом последовательных операций линии, так что захват изображения может быть осуществлен с различным временем экспозиции в каждом отдельном ряду. Или, в качестве альтернативного варианта, можно управлять операцией глобального затвора с типом всех одновременных операций линии.
Далее, исток транзистора M4 выбора соединяется с сигнальными линиями 202-a или 202-b столбца на основании строк.
Фотодиод (PD) накапливает заряд, сгенерированный фотоэлектрическим преобразованием. Сторона Р фотодиода PD заземляется, в то время как сторона N соединяется с истоком транзистора M1 переноса. Когда транзистор M1 переноса включен, заряд фотодиода PD переносится в плавающую диффузионную область FD. Так как в плавающей диффузионной области FD присутствует паразитная электрическая емкость, заряд, передаваемый в плавающую диффузионную область FD, является накопленным.
Напряжение Vdd электропитания прикладывается к стоку транзистора M3 усиления, в то время как затвор транзистора М3 усиления подсоединен к плавающей диффузионной области FD. Транзистор М3 усиления усиливает заряд (иными словами, напряжение) плавающей диффузионной области FD и преобразует его в сигнал напряжения (электрический сигнал). Транзистор M4 выбора предназначен для выбора пикселей для считывания сигналов на основе строк. Сток транзистора M4 выбора соединяется с истоком транзистора М3 усиления. Исток транзистора M4 выбора соединяется с сигнальной линией 202 столбца.
Когда транзистор M4 выбора включен, сигнал напряжения, соответствующий напряжению плавающей диффузионной области FD выводится на сигнальную линию 202 столбца. Напряжение Vdd электропитания прикладывается к стоку транзистора М2 сброса, в то время как исток транзистора М2 сброса соединяется с плавающей диффузионной областью FD. Когда транзистор М2 сброса включается, напряжение плавающей диффузионной области FD сбрасывается до напряжения Vdd электропитания.
Вторая микросхема 21 включает в себя аналогово-цифровой преобразователь 211 столбца, который соединяется с сигнальной линией 202-a или 202-b столбца. Вторая микросхема 21 также включает в себя схему 212 сканирования строк, схемы 213-a и 213-b сканирования столбцов, блок 214 управления тактированием, горизонтальные сигнальные линии (блок вывода) 215-a и 215-b, селекторный переключатель 216, память 217 кадров и блок 1021 определения значения оценки автоматической фокусировки.
Блок 214 управления тактированием управляет операцией тактирования схемы 212 сканирования строк, схем 213-a и 213-b сканирования столбцов и блока 211 аналого-цифрового преобразования столбца под управлением блока 106 управления. Схема 212 сканирования строк сканирует каждую строку, в то время как схемы 213-a и 213-b сканирования столбцов сканируют каждый столбец, соответственно.
Горизонтальные сигнальные линии 215-a и 215-b передают выводные сигналы (сигналы изображения) блока 211 аналогово-цифрового преобразователя столбца в соответствии с тактированием, управляемым в каждой из схем 213-a и 213-b сканирования столбцов.
Память 217 кадров временно хранит сигнал изображения, выводимый с горизонтальной сигнальной линии 215-b. Блок 1021 определения значения оценки автоматической фокусировки выполняет оценку автоматической фокусировки в соответствии с сигналом изображения, сохраненного в памяти 217 кадров, и посылает значение автоматической фокусировки блоку 106 управления.
Селекторный переключатель 216 является переключателем, который выборочно выводит сигнал изображения, который выводится на горизонтальную сигнальную линию 215-b, на любой из блока 1021 определения значения оценки автоматической фокусировки и блока 104 обработки изображений.
Необходимо обратить внимание, что сигнал изображения, передаваемый горизонтальной сигнальной линии 215-b, предоставляется блоку 104 обработки сигналов.
Фиг. 3 является поясняющим видом, иллюстрирующим выбор пикселей в сигнальной линии 202-a или 202-b столбца на первой микросхеме 20, проиллюстрированной на Фиг. 2A и 2B.
Фиг. 3 иллюстрирует блок пикселей, состоящий из шести строк и восьми столбцов, в котором соответствующие пиксели расположены соответственно массиву Байера.
Когда посредством оказания воздействия на функциональный блок 108, проиллюстрированный на Фиг. 1, включается режим управления фокусом, блок 106 управления выделяет строки, которые должны быть считаны в элементе 102 захвата изображения (иными словами, управляет положением селекторного переключателя 216 таким образом, чтобы подсоединять горизонтальную сигнальную линию 215-b к памяти 217 кадров). В результате, захват изображения для режима визирования по экрану (второй режим захвата изображения) и захват изображения для определения значения оценки автоматической фокусировки (первый режим захвата изображения) могут осуществляться одновременно.
Далее, сигнал изображения для режима визирования по экрану (второй сигнал изображения или же сигнал отображения изображения) выводится на сигнальную линию 202-а столбца, а сигнал изображения для определения оценки автоматической фокусировки (первый сигнал изображения) выводится на сигнальную линию 202-b столбца.
На Фиг. 3 строки с номерами 1 и 2 (первая группа пикселей) используются для захвата изображения для определения значения оценки автоматической фокусировки, в то время как строки с 3 по 8 (вторая группа пикселей) используются для захвата изображения для визирования по экрану. В проиллюстрированном примере, считывающее сканирование производится последовательно на основе строк, и каждые восемь строк последовательно сканируются для считывания.
При захвате изображения для определения значения оценки автоматической фокусировки выполняется прореживающее считывание 3 из 4 вертикальных пикселей одного цвета (трех из четырех линий), так как основное значение придается частоте кадров. В то же время, при захвате изображения для визирования по экрану, оставшийся 1 из 4 вертикальных пикселей одного цвета (одна из четырех линий) прореживается и добавляются три пикселя, так как основное значение придается качеству изображения.

Иными словами, при захвате изображения для определения значения оценки автоматической фокусировки, первая группа пикселей считывается при первой частоте кадров. При захвате изображений для визирования по экрану, вторая группа пикселей считывается при второй частоте кадров, которая ниже, чем первая частота кадров.
Как описывается далее, захват изображения для сканирования автоматической фокусировки и захват изображения для визирования по экрану разделяются на основании выбранных строк, так что сигналы изображений могут быть получены в разное время хранения заряда при частотах кадров, различающихся по размеру данных.
Далее, сигнал напряжения (аналоговый сигнал), выведенный в сигнальные линии 202-a и 202-b столбца, преобразовывается из аналогового сигнала в цифровой сигнал (сигнал изображения) в блоке 211 аналогового-цифрового преобразователя столбца, как проиллюстрировано на Фиг. 2В.
Сигнал изображения, который является выводом из блока 211 аналого-цифрового преобразователя столбца, считывается из блока 211 аналого-цифрового преобразователя столбца, в горизонтальную сигнальную линию 215-а или 215-b схемами 213-a и 213-b сканирования столбцов. Считанный в горизонтальную сигнальную линию 215-a сигнал изображения направляется в блок 104 обработки сигналов.
В то же время, считанный в горизонтальную сигнальную линию 215-b сигнал изображения выводится на переключатель 216, и выводится в блок 104 обработки сигналов или память 217 кадров в соответствии с управляющими командами блока 106 управления. Необходимо обратить внимание, что селекторный переключатель 216 переключается на основе кадра.
В этом случае, так как сигналы пикселей считываются без разрежения при фотографировании неподвижного изображения, переключатель 216 переключается на путь, соединенный с блоком 104 обработки сигналов.
Напротив, в режиме оценки автоматической фокусировки (иными словами, в режиме управления автоматической фокусировкой), сигнал изображения от горизонтальной сигнальной линии 215-b записывается в память 217 кадров посредством селекторного переключателя 216, и блок 1021 определения значения оценки автоматической фокусировки определяет значение оценки автоматической фокусировки на основе информации о контрасте в сигнале изображения, записанном в память 217 кадров. Значение оценки автоматической фокусировки представляет собой информацию о фокусировке на объекте. Информация о фокусировке включает в себя информацию о контрасте, величину сдвига расфокусировки в блоке механизма автоматической фокусировки в механическо-оптическом блоке 1011, или управляющую информацию блока механизма автоматической фокусировки. Значение оценки автоматической фокусировки достаточно мало по количеству данных по сравнению с многопиксельными данными изображения оценочного значения автоматической фокусировки. Значение оценки автоматической фокусировки посылается блоком 1021 определения значения оценки автоматической фокусировки в блок 106 управления.
Таким образом, в настоящем варианте выполнения, блок 1021 определения значения оценки автоматической фокусировки встроен в микросхему 21 для того, чтобы добиться энергосбережения, высокоскоростной обработки и низкой стоимости выполнения. В большинстве случаев, микросхема 21 и блок 104 обработки сигналов или блок 106 управления выполнены на отдельных подложках, что увеличивает сопротивление и электрическую емкость соединений при обмене информацией между микросхемами. Соответственно, скорость обмена информацией понижается по сравнению с обменом информацией внутри одной микросхемы. Для того, чтобы посылать высокоскоростные сигналы вовне, необходимо увеличение выходной мощности, таким образом, для поддержания качества волны, например, необходим усилитель.
В настоящем варианте выполнения, так как блок 1021 определения значения оценки автоматической фокусировки помещен совместно с микросхемой 21 на одной и той же полупроводниковой микросхеме, линия для вывода данных изображения может быть сделана короче и размещение усилителя может быть опущено. В дополнение к этому, так как значение оценки автоматической фокусировки само по себе является небольшим объемом данных, время, необходимое для обмена информацией между элементом 102 захвата изображения и блоком 106 управления сокращается и таким образом может быть достигнуто сокращение потребления электроэнергии.
В нижеследующем описании во время захвата изображения путь вывода через сигнальную линию 202-a столбца и горизонтальную сигнальную линию 215-a называется Ch1, в то время как путь вывода через сигнальную линию 202-b столбца и горизонтальную сигнальную линию 215-b называется Ch2.
Фиг. 4 является диаграммой тактирования для описания тактирования захвата изображения в режиме оценки автоматической фокусировки в камере 100, проиллюстрированной на Фиг. 1.
Как проиллюстрировано на Фиг. 4, тактирование захвата изображения обуславливается сигналом VD вертикальной синхронизации. Когда режим оценки автоматической фокусировки включен, блок 106 управления одновременно запускает управляющий сигнал автоматической фокусировки, захват изображения для визирования по экрану с использованием канала Ch1 и захват изображения для оценки автоматической фокусировки с использованием канала Ch2 на заднем фронте сигнала VD вертикальной синхронизации в момент T0.
В период с T0 до TF1, сигнал изображения для оценки автоматической фокусировки, который считывается с блока 20 пикселей посредством канала Ch2, сохраняется в памяти 217 кадров посредством горизонтальной сигнальной линии 215-b и селекторного переключателя 216. Далее, в период с TF1 до TF2, блок 1021 определения значения оценки автоматической фокусировки определяет значение оценки автоматической фокусировки в соответствии с сигналом автоматической фокусировки, сохраненном в памяти 217 кадров. Далее, в период с TF2 до TF3, блок 1021 определения значения оценки автоматической фокусировки передает значение оценки автоматической фокусировки в блок 106 управления.
В проиллюстрированном примере, во время периода первого сигнала VD вертикальной синхронизации, для визирования по экрану из одного кадра захватывается изображение, состоящее из одного кадра, в то время как для оценки автоматической фокусировки (сканирование автоматической фокусировки) захватывается изображения из трех кадров. Когда блок 106 управления переводит сигнал VD вертикальной синхронизации на уровень L (время T1), оценка автоматической фокусировки завершается.
Как показано ниже, камере 100, проиллюстрированной на Фиг. 1, нет необходимости посылать данные изображения блоку 106 управления посредством блока 104 обработки изображений для того, чтобы получить значение оценки автоматической фокусировки в режиме оценки автоматической фокусировки. Иными словами, значение оценки автоматической фокусировки, которое является небольшим объемом данных, выводится напрямую из элемента 102 захвата изображения в блок 106 управления. В результате, уменьшается нагрузка, что позволяет достигнуть снижения потребления электроэнергии.
Блок 106 управления сравнивает значение оценки автоматической фокусировки с описанным позже ожидаемым значением заданной автоматической фокусировки, описанным далее, и гасит сигнал автоматической фокусировки (время T1), если значение автоматической фокусировки удовлетворяет ожидаемому значению автоматической фокусировки. После гашения управляющего сигнала автоматической фокусировки, прерывается лишь захват изображения для оценки автоматической фокусировки, а захват изображения для визирования по экрану продолжается.
Фиг. 5 является блок-схемой последовательности операций для описания управления в камере 100, проиллюстрированной на Фиг. 1. Необходимо обратить внимание, что проиллюстрированная блок-схема последовательности операций выполняется под управлением блока 106 управления.
Когда электропитание камеры 100 включается, и она переходит в состояние ожидания (иными словами, в состояние готовности к фотографированию перед захватом изображения), блок 106 управления определяет, задействован ли режим оценки автоматической фокусировки (этап S502). Вкратце, блок 106 управления определяет, установлен ли режим автоматической фокусировки.
Если режим автоматической фокусировки не задействован (вариант НЕТ на этапе S502), блок 106 управления начинает захват изображения для визирования по экрану (этап S503) и переходит к этапу S515, описанному ниже.
Если режим оценки автоматической фокусировки определяется как задействованный (вариант ДА на этапе S502), блок 106 управления включает управляющий сигнал автоматической фокусировки (уровень H)(этап S504). Далее, блок 106 управления заменяет 0 на переменную n для подсчета количества раз, когда было захвачено изображение для визирования по экрану (этап S505)
Далее, как описано на Фиг. 4, блок 106 управления запускает захват изображения для оценки автоматической фокусировки (этап S506) и также запускает захват изображения для визирования по экрану.
После того, как захват изображения для оценки автоматической фокусировки был запущен, блок 106 управления увеличивает переменную n на 1 (этап S507). Далее, под управлением блока 106 управления, блок 1021 определения значения оценки автоматической фокусировки определяет значение оценки AF_K автоматической фокусировки в соответствии с сигналом изображения для оценки автоматической фокусировки, полученным при захвате изображения для оценки автоматической фокусировки (этап s508).
Далее, блок 106 управления определяет, удовлетворяет ли значение оценки AF_K автоматической фокусировки Формуле (1) в отношении ожидаемых значений K_min и K_max автоматической фокусировки; иными словами, удовлетворяет ли значение оценки AF_K автоматической фокусировки заданному оценочному условию (этап S509).
K_min<AF_K<K_max (1),
где ожидаемые значения K_min и K_max автоматической фокусировки выражают минимальное значение и максимальное значение значения оценки автоматической фокусировки, которые заранее записаны в блоке 106 управления на этапе проектирования или на этапе настройки камеры 100.
Если значение оценки AF_K автоматической фокусировки не удовлетворяет Формуле 1 (вариант НЕТ на этапе S509), то блок 106 управления вычисляет значение ответного управления в соответствии с вышеописанным значением AF_K оценки автоматической фокусировки. После этого блок 106 управления выполняет управление приведением в движение блока 103 привода в соответствии с величиной ответного управления таким образом, чтобы привести в движение фокусирующую линзу, включенную в механическо-оптический блок 1011, вдоль оптической оси (этап S510).
Далее, блок 106 управления определяет, совпадает ли переменная n (количество раз захвата изображения для значения оценки автоматической фокусировки) с заданным числом (в данном случае - 3) (этап S511). Если количество раз захвата изображения для значения оценки автоматической фокусировки меньше 3 (вариант НЕТ на этапе S511), то блок 106 управления возвращается к выполнению этапа S506, и выполняет захват изображения для оценки автоматической фокусировки.
Если количество раз захвата изображения для значения оценки автоматической фокусировки, равно 3 (вариант ДА на этапе S511), блок 106 управления выполняет отображение визирования по экрану (этап S512), и после этого возвращается к выполнению этапа S505 для установления количества n раз, когда изображение было захвачено для определения автоматической фокусировки, на 0.
Если значение оценки AF_K автоматической фокусировки удовлетворяет Формуле (1) (Вариант ДА на этапе S509), то блок 106 управления выключает управляющий сигнал автоматической фокусировки (уровень L) (этап S514) и прерывает захват изображения для оценки автоматической фокусировки элементом 102 захвата изображения (этап S514). После этого блок 106 управления отображает на блоке 109 отображения изображений изображение, соответствующее захваченному сигналу изображения для визирования по экрану (этап S515), и камера переходит в состояние ожидания (этап S517).
В блок-схеме последовательности операций, проиллюстрированной на Фиг. 5, после того, как захват изображений для оценки автоматической фокусировки был прерван, блок 106 управления отображает изображение, соответствующее сигналу изображения, полученному посредством захвата изображения для визирования по экрану на этапе S516. Как только был запущен захват изображения для визирования по экрану на этапе S503, блок 106 управления переходит к исполнению этапа S515 для выполнения визирования по экрану.
Как описано далее, в первом варианте выполнения настоящего изобретения, блок 1021 определения значения оценки автоматической фокусировки включен в состав второй микросхемы 21. Соответственно, в то время как захватываются изображения для визирования по экрану, изображения для оценки автоматической фокусировки захватываются с высокой частотой кадров и значения оценки автоматической фокусировки могут быть вычислены и выведены. Как следствие этого, временная задержка во времени выполнения оценки автоматической фокусировки может быть снижена.
Более того, при оценке автоматической фокусировки, только значение оценки, занимающее небольшой объем данных, посылается от элемента 102 захвата изображения в блок 106 управления напрямую, так что нагрузка исходящего сигнала снижается и может быть снижено потребление электроэнергии.
Несмотря на то, что пример автоматической фокусировки, выполненной во время визирования по экрану, описан в варианте выполнения изобретения выше, вышеописанный способ может быть использован не только при визировании по экрану, но также и при ином фотографировании движущихся изображений.
Более того, в настоящем варианте выполнения изобретения, значение оценки автоматической фокусировки выводится напрямую из элемента 102 захвата изображения на блок 106 управления и блок 106 управления управляет механическо-оптическим блоком 1011 с помощью блока 103 привода в соответствии со значением автоматической фокусировки. Однако, блок 103 привода может выполнять управление движением механическо-оптического блока 1011 в соответствии со значением автоматической фокусировки.
ВТОРОЙ ВАРИАНТ ВЫПОЛНЕНИЯ
Далее описывается один пример камеры по второму варианту выполнения настоящего изобретения.
Конфигурация камеры по второму варианту выполнения изобретения схожа с конфигурацией камеры, проиллюстрированной на Фиг. 1 за исключением того, что конфигурация элемента 102 захвата изображения отличается от элемента захвата изображения, проиллюстрированного на Фиг. 2В. В следующем описании будет описано фотографирование неподвижного изображения для функции фотометрии с блоком излучения света, таким, как стробоскопический прибор.
Фиг. 6 является блок-схемой, иллюстрирующей конфигурацию одного примера элемента захвата изображения для использования в камере в соответствии со вторым вариантом выполнения настоящего изобретения.
Необходимо обратить внимание, что на Фиг. 6 компоненты, идентичные элементу захвата изображения, проиллюстрированном на Фиг. 2А, обозначены идентичными ссылочными позициями для того, чтобы опустить их описание.
В элементе 102 захвата изображения, проиллюстрированном на Фиг. 6, вторая микросхема 21 включает в себя блок 601 оценки значения фотометрии вместо блока 1021 определения значения оценки автоматической фокусировки. Блок 601 оценки значения фотометрии соединен с памятью 217 кадров и с блоком 106 управления.
Блок 601 оценки значения фотометрии высчитывает в качестве значения фотометрии соотношение цветов и значение экспозиции в соответствии сигналом изображения, считанного с первой микросхемы 20 посредством сигнальной линии 202-b столбца и горизонтальной сигнальной линии 215b (иными словами, канал Ch2). В соответствии со значением фотометрии, блок 601 оценки фотометрии выводит на блок 106 управления управляющие данные, такие, как коэффициент баланса белого и величину управления излучением света для блока 107 излучения света
Блок 106 управления посылает управляющие инструкции блоку 104 обработки сигналов и блоку 107 излучения света в соответствии с управляющими данными фотометрии для управления корректировкой баланса белого в блоке 104 обработке сигналов и величиной излучения света в блоке 107 излучения света.
Фиг. 7 является диаграммой тактирования для описания тактирования захвата изображения в режиме оценки фотометрии по второму варианту выполнения настоящего изобретения.
В режиме оценки фотометрии, блок 106 управления постоянно запускает захват изображения для визирования по экрану с использованием канала Ch1 и захват изображения для оценки фотометрии с использованием канала Ch2 при завершении сигнала VD вертикальной синхронизации во время T70, при синхронизации сигналом VD вертикальной синхронизации. При захвате изображения для оценки фотометрии выполняется захват изображения для оценки фотометрии в отношении коэффициента баланса белого и для управления излучением света в блоке 107 излучения света.
Здесь захват изображения для оценки фотометрии для расчета коэффициента баланса белого называется захватом изображения для расчета коэффициента баланса белого, а захват изображения для оценки фотометрии для управления излучением света называется захватом изображения для фотометрии величины управления излучением света.
Сначала, в период с Т70 до Т71, выполняется захват изображения для расчета коэффициента баланса белого. Сигнал изображения для замера коэффициента баланса белого, считанный с блока 20 пикселей посредством канала Ch2, сохраняется в памяти 217 кадров 20 посредством горизонтальной сигнальной линии 215-b и селекторного переключателя 216.
В период с T71 до T72, блок 601 оценки значения фотометрии рассчитывает коэффициент баланса белого в соответствии с сигналом изображения для замера коэффициента баланса белого, сохраненного в памяти 217 кадров. Далее, в период с Т72 до Т73, блок 601 оценки значений фотометрии выводит коэффициент баланса белого в блок 106 управления.
Далее, во время Е73, блок 106 управления заставляет сигнал управления излучением света подниматься (до уровня Н), и запускает захват изображения для фотометрии величины управления излучением света, одновременно заставляя блок 107 излучения света излучать свет с заданной величиной излучения света. После этого, в момент Т74, блок 106 управления заставляет управляющий излучением света сигнал опуститься (до уровня L) и прерывает захват изображений для фотометрии величины управления излучаемым светом.
Вследствие этого, в период с Т73 до Т74, захват изображений для фотометрии величины излучаемого света для блока 107 излучения света выполняется для фотографирования неподвижного изображения и сигнал изображения для оценки величины управления излучением света сохраняется в памяти 217 кадров.
Так как сигнал управления излучением света включается в период с Т73 до Т74, блок 107 излучения света выполняет предварительное излучение света (иными словами пре-излучение), так что выполняется захват изображения для фотометрии величины управления излучением света, который является захватом изображения для расчета величины экспозиции объекта.
В период с Т74 до Т75, блок 601 оценки значения фотометрии рассчитывает значение экспозиции по отношению к объекту в соответствии с сигналом изображения для оценки величины управления излучением света, хранящейся в памяти 217 кадров. В соответствии со значением экспозиции, блок 601 оценки значения фотометрии генерирует величину управления излучением света. Далее, в период с Т75 до Т76, блок 601 оценки значения фотометрии выводит величину управления излучением света в блок 106 управления.
Во время Т76, блок 106 управления переключает режим оценки фотометрии на режим фотографирования неподвижных объектов, одновременно включая сигнал управления излучением света для того, чтобы побудить блок 107 излучения света излучать свет (основное излучение света). В это время, блок 106 управления управляет величиной излучения света блока 107 излучения света в соответствии с величиной управления излучением света.
Далее, блок управления 106 переключает селекторный переключатель 216 на вывод сигналов изображения, выводимых посредством канала Ch2 в блок 104 обработки сигналов, и передает сигналы изображения, считываемые со всех пикселей блока 20 пикселей в блок обработки сигналов 104.
В проиллюстрированном примере, изображение для визирования по экрану захватывается в период сигнала VD вертикальной синхронизации. В течение этого периода выполняются захват изображения для расчета коэффициента баланса белого, расчет и вывод коэффициента баланса белого, захват изображения для фотометрии величины управления излучением света и расчет и вывод величины управления излучением света.
Как описано далее, во втором варианте выполнения настоящего изобретения, блок 1021 определения значения оценки автоматической фокусировки включен в состав второй микросхемы 21, так что во время захвата изображения для визирования по экрану, изображения для оценки фотометрии могут захватываться при высокой частоте кадров, а значения оценки фотометрии могут быть рассчитаны и выведены. Как следствие этого, временная задержка во время выполнения оценки фотометрии может быть снижена.
Более того, при оценке фотометрии, только значение оценки фотометрии, являющееся небольшим объемом данных (коэффициент баланса белого и величина управления излучением света) посылаются напрямую из блока 102 захвата изображения в блок 106 управления. Вследствие этого, нагрузка при выводе сигнала уменьшается, и потребление электроэнергии может быть снижено.
В вышеописанном варианте выполнения, значение оценки фотометрии вводится напрямую из блока 102 захвата изображения в блок 106 управления, и блок 106 управления управляет блоком 104 обработки изображений и блоком 107 излучения света в соответствии со значениями оценки фотометрии. Однако, значение оценки фотометрии может быть послано из блока 102 захвата изображения в блок 1-4 обработки изображений и в блок 107 излучения света для осуществления прямого управления.
ТРЕТИЙ ВАРИАНТ ВОПЛОЩЕНИЯ
Далее будет описан один пример камеры по третьему варианту выполнения настоящего изобретения.
Конфигурация камеры по третьему варианту выполнения сходна с вариантом выполнения камеры, проиллюстрированным на Фиг. 1. за исключением того, что конфигурация блока 102 захвата изображения отличается от блока захвата изображения, проиллюстрированного на Фиг. 2B.
Фиг. 8 является блок-схемой, иллюстрирующей конфигурацию одного примера блока захвата изображения для использования в камере по третьему варианту выполнения настоящего изобретения.
Необходимо отметить, что в Фиг. 8, компоненты, идентичные блоку захвата изображения, проиллюстрированному на Фиг. 2А и 6, обозначены идентичными ссылочными позициями для того, чтобы пропустить их описание.
В блоке 102 захвата изображения, проиллюстрированном на Фиг. 8, вторая микросхема 21 включает в себя блок 801 оценки сигнала изображения вместо блока 1021 определения значения оценки автоматической фокусировки. Блок 801 оценки сигнала изображения, подсоединен к памяти 217 кадров и к блоку 106 управления.
Блок 801 оценки сигнала изображения рассчитывает стандартное отклонение (также называемое значением стандартного отклонения), которое показывает изменение сигнала, в соответствии с сигналами изображений, считываемых с первой микросхемы 20 посредством сигнальной линии 202-b столбца. После этого блок 801 оценки сигнала изображения выводит стандартное отклонение в блок 106 управления в виде значения оценки сигнала изображения. Если стандартное отклонение превышает заранее заданный порог (порог стандартного отклонения), блок 106 управления посылает в блок 103 привода сигнал управления захватом изображения, который управляет величиной прироста или величиной экспозиции (иными словами, периодом экспозиции). Блок 103 привода управляет блоком 102 захвата изображения в соответствии сигналом управления захватом изображения для выполнения управления экспозиции. Это связано с тем, что превышение стандартным отклонением заранее заданного порога означает ухудшение соотношения сигнала к шуму в сигнале изображения, так что ограничение управления экспозицией эффективно для поддержания заданного качества изображения.
В примере, проиллюстрированном на Фиг. 8, выполняется управление экспозицией для поддержания заданного качества изображения. Однако, заданное качество изображения может поддерживаться не управлением экспозицией, а, например, изменением корректировочных значений при обработке по уменьшению шума. Далее, на проиллюстрированном примере, блок 801 оценки сигнала изображения выполнен с возможностью вывода значения оценки сигнала изображения, являющегося стандартным отклонением. Однако, блок 801 оценки сигнала изображения может быть выполнен с возможностью вывода управляющего сигнала в соответствии со стандартным отклонением на блок 103 привода, блок 104 обработки сигналов или блок 107 излучения света для поддержания заданного качества изображения.
Фиг. 9 является диаграммой тактирования для описания тактирования в режиме оценки стандартного отклонения в третьем варианте воплощения настоящего изобретения.
Когда камера начинает работать в режиме оценки стандартного отклонения, блок 106 управления начинает захват изображений на заднем фронте сигналов VD1 и VD2 вертикальной синхронизации в момент T90. Здесь, блок 106 управления начинает захват изображения для визирования по экрану с использованием канала Ch1 при синхронизации сигналом VD1 вертикальной синхронизации, а также захват изображения для оценки стандартного отклонения (также именуемого как захват изображения для оценки сигнала изображения) с использованием канала Ch2 при синхронизации сигналом VD2 вертикальной синхронизации.
При захвате изображений для визирования по экрану при синхронизации сигналом VD1 вертикальной синхронизации, операция захвата изображения выполняется в соответствии с частотой кадров для отображения визирования по экрану. В период 1VD (с T90 по T93), относящийся к сигналу VD2 вертикальной синхронизации, производится захват множества кадров для визирования по экрану.
При оценке сигнала изображения в период с Т90 по Т91, сигналы изображений для определения стандартного отклонения, считываемые в канал Ch2, считываются с блока 102 захвата изображения. Настойки в период с Т90 по Т91 идентичны настройкам в период экспозиции для захвата неподвижных изображений после момента Т93. Управление экспозицией после момента Т93 определяется в соответствии с управлением автоматической экспозицией, соответствующим сигналу изображения, полученному от операции пользователя с использованием функционального блока 108 или от элемента 102 захвата изображения. Таким образом, при захвате изображений для оценки сигнала изображения в канале Ch2, выполняется управление экспозицией, отличающееся от управления экспозицией для отображения визирования по экрану в канале Ch1.
Далее, ухудшение соотношения сигнал/шум в связи с усилением сигнала, что влечет за собой ухудшение качества изображения перед фотографированием неподвижных изображений, может быть ограничено путем осуществления управления экспозицией, такого же, как управление при фотографировании неподвижных изображений после момента Т93 в канале Ch2. Более того, управление захватом изображения, такое, как операция длительного накопления пикселей захвата изображения, может быть ограничено. В результате, ухудшение качества изображения неподвижного изображения ниже заданного уровня может быть предотвращено.
Вывод канала Ch2, полученный в качестве результата захвата изображения в период с Т90 по Т91, то есть, сигналы изображения для определения стандартного отклонения, сохраняется в памяти 217 кадров посредством горизонтальной сигнальной линии 215-b и переключателя 216. Сигналы изображения для определения стандартного отклонения, хранящиеся в памяти 217 кадров с период с Т91 по Т92, считываются в блок 801 оценки сигнала изображения, и блок 801 оценки сигнала изображения рассчитывает значение стандартного отклонения, которое является изменением сигнала в сигналах изображения для определения стандартного отклонения.
Далее, в период с Т92 по Т93, блок 801 оценки сигнала изображения выводит из элемента 102 захвата изображения только значение стандартного отклонения, рассчитанного в период с Т91 по Т92, в блок 106 управления. После момента Т93, камера переключается из режима оценки стандартного отклонения в режим фотографирования неподвижных изображений. Блок 106 управления переключает переключатель 216 для того, чтобы разрешить вывод сигналов изображения в блок 104 обработки так, что все пиксели могут быть считаны. В этом случае, блок 106 управления осуществляет управление экспозицией в соответствии со значением стандартного отклонения, рассчитанного блоком 801 оценки сигнала изображения.
Как описано выше, третий вариант выполнения настоящего изобретения выполнен с возможностью осуществления захвата сигнала изображения для визирования по экрану и сигнала изображения для оценки одновременно. Соответственно, перед осуществлением захвата неподвижного изображения, значение стандартного отклонения для управления операцией захвата неподвижного изображения может быть определено перед фактическим фотографированием.
Кроме того, третий вариант выполнения выполнен с возможностью непосредственного вывода в блок 106 управления значения стандартного отклонения, являющегося значением оценки сигнала изображения, занимающим небольшой объем данных. Соответственно, становится необязательно посылать сигнал изображения, занимающий большой объем данных от элемента 102 захвата изображения к блоку 104 обработки сигналов. В результате, уменьшение нагрузки вследствие вывода сигнала позволяет снизить потребление электроэнергии.
Таким образом, в третьем варианте выполнения настоящего изобретения, сигналы изображения одновременно получают в элементе 102 захвата изображения в период захвата изображения, отличающегося от периода захвата изображения для визирования по экрану, посредством операции захвата изображения, отличающейся от операции захвата изображения для визирования по экрану. В соответствии с полученными сигналами изображения, значение стандартного отклонения сигнала изображения, являющегося значением оценки сигнала изображения, рассчитывается в элементе 102 захвата изображения и выводится в блок 106 управления. Как следствие, значение оценки сигнала изображения может быть получено во время режима визирования по экрану, что позволяет достигнуть уменьшения времени вместе с энергосбережением.
Согласно третьему варианту выполнения, значение стандартного отклонения, относящееся к сигналам изображений, описывается как рассчитываемое, значения оценки, как показано ниже, могут быть рассчитаны в блоке 801 оценки сигнала изображения, и соответствующие корректировки могут быть осуществлены в блоке 106 управления.
(1) Значение коррекции смещения сигнала изображения, являющееся величиной изменения в компоненте смещения на каждый кадр, для использования в качестве опорного значения сигнала изображения, может быть рассчитано из сигналов изображения. (2) Шум фиксированного шаблона в форме полосы может быть обнаружен на основе столбцов или строк. (3) Мерцание может быть обнаружено путем установки условий экспозиции, отличающихся от условий для записи движущегося изображения или отображения визирования по экрану, а также путем обнаружения изменения в выходе источника света. Значение корректировки дрожания рук или значение обнаружения движения объекта могут быть рассчитаны путем определения (4) коэффициента баланса белого, (5) величины перемещения целевого объекта и (6) векторной величины. (7) Значение оценки затенения цветности, (8) значение оценки затенения яркости, и (9) значение оценки мерцания могут быть рассчитаны для осуществления управления экспозицией посредством управления затвором блока механизма диафрагмы в механическо-оптическом блоке 1011 или элементе 102 захвата изображения.
Естественно, необходимо понимать, что вышеуказанные значения оценок могут быть получены и скорректированы не только раскрытыми способами, но также любыми иными общеизвестными способами.
Как ясно из вышеприведенного описания, в примере, проиллюстрированном на Фиг. 1, блок 106 управления и блок 103 привода функционируют как блок управления и блок управления считыванием. Блок 106 управления и блок 109 отображения изображения также функционируют как блок управления отображением.
Несмотря на то, что настоящее изобретение описано на основе вариантов выполнения, необходимо понимать, что настоящее изобретение не ограничивается этими конкретными вариантами выполнения, и предполагается, что различные формы, подпадающие под объем и сущность настоящего изобретения включены сюда.
Например, функции в вышеописанных вариантах выполнения могут быть использованы как способ управления, и способ управления может быть выполнен устройством захвата изображения. Кроме того, программа, имеющая функции вышеописанных вариантов выполнения, может быть использована как управляющая программа, и программа может быть выполнена компьютером, включенным в состав устройства захвата изображения. Например, управляющая программа может быть записана на машиночитаемом носителе записи.
Каждый из вышеописанных способов управления управляющих программ включает в себя, по крайней мере, этап управления и этап управления отображением.
Настоящее изобретение также может быть осуществлено путем выполнения описанной далее обработки. Программное обеспечение (программа), которая применяет функции вышеописанных вариантов выполнения, доставляется в систему или устройство посредством сети или различных типов носителей записи. Компьютер (или такое устройство, как центральный процессор или микропроцессор) системы или устройства считывает и выполняет программу.
Согласно настоящему изобретению, управляющая информация, которая должна быть использована исключительно для управления, такого, как управление фокусом, выводится из элемента захвата изображения во время выполнения управления. В качестве результата, время передачи данных может быть сокращено, и, в дополнение к этому, можно избежать ухудшения качества изображения.
ЧЕТВЕРТЫЙ ВАРИАНТ ВЫПОЛНЕНИЯ
Фиг. 11 является блок-схемой, иллюстрирующей пример конфигурации устройства захвата изображения в соответствии с четвертым вариантом выполнения настоящего изобретения. Например, проиллюстрированное устройство захвата изображения применено к цифровой фотокамере с функцией съемки движущихся изображений или видеокамере.
На Фиг. 11, устройство 1100 захвата изображения включает в себя объектив 1101, датчик 1102 изображения, блок 1103 обработки сигнала изображения, блок 1104 сжатия-развертывания, блок 1105 управления приводом объектива, блок 1106 определения значения оценки сигнала захвата изображения, блок 1107 определения композиции и блок 1108 управления системой. Устройство 1100 захвата изображения дополнительно включает в себя блок 1109 излучения света, функциональный блок 1110, блок 1111 хранения и блок 1112 отображения.
Объектив 1101 представляет собой группу линз, образующих оптическую систему для фотографирования. Фокусирующая линза включена в состав объектива 1101. Фокусирующая линза является линзой настройки фокуса. Фокусирующая линза выполнена таким образом, что ее положение может быть изменено вдоль направления оптической оси. У блока 1105 управления приводом объектива как у блока настройки фокуса есть функция выполнения управления приводом фокусирующей линзы на основе значения, определенного блоком 1106 определения значения оценки захвата изображения, и выполнения обработки настройки фокуса. Свет, который проходит через объектив 1101, фокусируется в виде оптического изображения объекта на плоскости формирования изображения датчика 1102 изображения, который сформирован из КМОП датчика изображений или сходного с ним. После этого оптическое изображение фотоэлектрически преобразуется в сигнал пикселей в пикселях 1201, описанных далее.
У датчика 1102 изображения есть пиксели 1201 и аналого-цифровой преобразователь. Например, датчик 1102 изображения является так называемым КМОП датчиком XY типа считывания. Под управлением блока 1108 управления системой, датчик 1102 изображения выполняет операцию захвата изображения, такую, как экспозиция, считывание сигнала и сброс, и выводит сигнал захвата изображения (также называемый сигналом изображения).
Блок 1106 определения значения оценки захвата изображения определяет значение оценки захвата изображения из сигнала изображения, выводимого из датчика 1002 изображения. В этом случае значение оценки захвата изображения определяется в соответствии с тактированием, выведенным из блока 1108 управления системой. Подробно его работа будет описана далее.
Здесь значение оценки захвата изображения относится к параметру, необходимому для осуществления управления устройством захвата изображения, корректировки сфотографированных изображений и тому подобного. Например, значение оценки захвата изображения является значением оценки, необходимым для основных операций устройства захвата изображения, таких, как значение оценки автоматической фокусировки, значение оценки баланса белого (WB) и значение оценки автоматической экспозиции (AE). Значение оценки автоматической фокусировки является значением оценки для фокусировки на объекте во время захвата изображения, которое необходимо в основном для управления фокусирующей линзой. Значение оценки баланса белого является значением, необходимым для корректировки цветности во время захвата изображения, а также параметром, необходимым во время проявки. Значение оценки автоматической экспозиции является значением оценки, необходимым для получения надлежащей экспозиции во время съемки. Значение оценки автоматической экспозиции необходимо в основном для установки диафрагмы, скорости затвора и чувствительности.
Блок 1108 управления системой определяет величину управления объективом 1101 на основе значения оценки автоматической фокусировки, которое является одним из параметров, получаемых в качестве значения оценки захваченного изображения, и выводит величину управления в блок 1105 управления приводом объектива. Блок 1105 управления приводом объектива выполняет настройку фокусировки на объект путем приведения в движение объектива 1101 в направлении оптической оси на основе величины управления значения оценки автоматической фокусировки, получаемого от блока 1108 управления системой.
Под управлением блока 1108 управления системой блок 1103 обработки сигнала изображения выполняет обработку сигнала изображения, который является выводом из датчика 1102 изображения, для генерации данных изображения. Более конкретно, на основании значения оценки захвата изображения, определенного блоком определения значения оценки захвата изображения, для генерации данных изображения осуществляется такая обработка сигнала, как обработка настройки баланса белого, обработка коррекции цвета и обработка автоматической экспозиции.
Блок 1104 сжатия-развертывания функционирует под управлением блока 1108 управления системой и выполняет операцию кодирования с сжатием в заданный формат данных неподвижного изображения над данными изображения, являющимися выводом блока 1103 обработки сигналов изображения. Например, заданным форматом данных неподвижного изображения является JPEG (Joint Photographic Coding Experts Group, Группа экспертов в области кодирования фотографии). Блок 1004 сжатия-развертывания также выполняет операцию декодирования с развертыванием на закодированных данных изображения, присланных из блока 1108 управления системой. Блок 1004 сжатия-развертывания также может выполнять операции кодирования с сжатием/декодирования с развертыванием на данных движущегося изображения с использованием MPEG (Moving Picture Experts Group, Группа экспертов по движущимся изображениям) и ему подобных.
В блоке 1107 определения композиции композиция фотографии определяется на основании условий фотографирования полученных от бока управления. В соответствии с определенной фотографической композицией, информация для изменения параметров, таких как параметр фотографирования для фотографирования и параметр обработки изображения направляются в блок 1108 управления системой. Здесь, блок 1106 определения значения оценки захвата изображения определяет, какой сигнал использовать для определения значения захвата изображения, сигнал изображения для определения значения оценки захвата изображения или сигнал изображения для отображения, как описано далее, на основании информации об определении композиции.
Блок 1108 управления системой является микроконтроллером, включающим в себя, например, центральный процессор (CPU), постоянное запоминающее устройство (ROM), и оперативное запоминающее устройство (RAM). Центральный процессор блока 1108 управления системой выполняет программы, хранящиеся в постоянном запоминающем устройстве таким образом, что все устройство 1100 захвата изображения управляется полностью.
Когда в ходе обработки автоматической экспозиции, выполняемой блоком 1003 обработки сигналов, определяется, что значение экспозиции объекта низко, блок 1109 излучения света излучает свет для освещения объекта. Например, в качестве блока 1109 излучения света могут быть использованы стробоскопические приборы, использующие ксеноновую лампу или светодиодные светоизлучающие приборы. Например, функциональный блок 1110 имеет различные функциональные клавиши, рычаги и диски, такие, как кнопка спуска затвора, для передачи сигнала о манипуляции, соответствующего введенной пользователем функции в блок 1108 управления системой.
Блок 1111 записи является, например, носителем записи, таким как портативное полупроводниковое запоминающее устройство, оптический диск, жесткий диск (HDD) или магнитная лента для хранения данных изображения, которые закодированы с сжатием блоком 1104 сжатия-развертывания в качестве файла изображения. Блок 1111 записи считывает файл изображения, указанный блоком 1108 управления системой и выводит его в блок 1108 управления системой.
Блок 1112 отображения изображения включает в себя, например, устройство отображения, такое, как жидкокристаллический дисплей (LCD) и интерфейсную схему для жидкокристаллического дисплея для отображения на устройстве отображения изображения, указанного данными изображения, направленными из блока 1108 управления системой.
Фиг. 12А и 12B являются поясняющими видами для иллюстрации конфигурации датчика 1102 изображения, проиллюстрированного на Фиг. 11. Фиг. 12А является видом в перспективе датчика изображений, а Фиг. 12B является блок-схемой, иллюстрирующей его конфигурацию.
На Фиг. 12А, датчик 1102 изображения имеет первую микросхему (первый блок элемента) 120 и вторую микросхему (второй блок элемента) 121, при этом первая микросхема 120 расположена слоем над второй микросхемой 121. Первая микросхема 120, у которой есть множество пикселей 1201, расположенных в форме матрицы, расположена слоем таким образом, что массив пикселей обращен на сторону падения света (то есть, расположен на стороне, принимающей оптическое изображение). У второй микросхемы 121 есть сформированный на ней блок возбуждения пикселей, включающий в себя схемы 1213-a и 1213-b сканирования столбцов и схему сканирования строк 1212, описанные далее.
Если пиксели 1201 сформированы на первой микросхеме 120 и блок возбуждения пикселей сформирован на второй микросхеме 121, таким образом, процесс изготовления периферийных схем и блока пикселей датчика 1102 изображений могут быть разделены. В результате, тенденция к уменьшению ширины разводки и сильному увеличению плотности разводки в периферийных схемах приводит к улучшению скорости, уменьшению размеров и более высокой производительности.
Как проиллюстрированного на Фиг. 12B, пиксели 1201 расположены в форме матрицы на первой микросхеме 120 и каждый из пикселей 1201 соединен с сигнальной линией 1203 переноса, сигнальной линией 1204 сброса и сигнальной линией 1205 выбора строки в горизонтальном направлении (направление строки). Пиксели 1201 также соединены с сигнальными линиями 1202-a и 1202-b столбца в вертикальном направлении (направлении столбца). Необходимо обратить внимание, что каждая из сигнальных линий 1202-a и 1202-b столбца сконфигурирована так, чтобы соединить пиксели с разными местами назначения считывания на основе строк.
Как проиллюстрировано, каждый из пикселей 1201 также имеет фотодиод PD, который является элементом фотоэлектрического преобразования, транзистор M1 переноса, транзистор M2 сброса, транзистор М3 усиления, транзистор M4 выбора и плавающую диффузионную область FD. В проиллюстрированном примере, каждый из транзисторов является полевым МОП-транзистором c каналом n-типа (MOS FET).
Затворы транзистора М1 переноса, транзистора M2 сброса и транзистора M4 выбора подсоединены к сигнальной линии 1203 переноса, сигнальной линии 1204 сброса и сигнальной линии 1205 выбора строки, соответственно. Эти сигнальные линии с 1203 по 1205 расположены по всей протяженности в горизонтальном направлении, и все пиксели в одной строке возбуждаются одновременно. Как следствие этого, можно управлять операцией сворачивания затвора с типом последовательных операций линии или глобального затвора с типом всех одновременных операций линии. Кроме того, исток транзистора M4 выбора подсоединен к сигнальной линии 1202-a или 1202-b столбца на основе строк.
Фотодиод PD накапливает заряд, сгенерированный в ходе фотоэлектрического преобразования. Р сторона фотодиода PD заземлена в то время как N сторона фотодиода PD подсоединена к истоку транзистора М1 переноса. Когда транзистор М1 переноса включается, заряд фотодиода PD передается в плавающую диффузионную область FD. Так как в плавающей диффузионной области существует паразитная емкость, заряд, передаваемый в плавающую диффузионную область, накапливается.
Напряжение Vdd электропитания подается на сток транзистора М3 усиления, в то время как затвор транзистора М3 усиления соединен с плавающей диффузионной областью. Транзистор М3 усиления усиливает заряд (то есть, напряжение) плавающей диффузионной области и преобразует его в сигнал напряжения. Транзистор M4 выбора выбирает, с помощью сигнальной линии 1205 выбора строки, пиксели для считывания сигналов на основе строк. Сток транзистора M4 выбора соединен с истоком транзистора М3 усиления. Исток транзистора M4 выбора соединен с сигнальной линией 1202 столбца.
Когда транзистор M4 выбора включается посредством сигнальной линии 1205 выбора строки, сигнал напряжения, соответствующий напряжению в плавающей диффузионной области выводится на сигнальную линию 1202 столбца. Напряжение Vdd электропитания подается на сток транзистора М2 сброса, в то время как исток транзистора М2 сброса соединен с плавающей диффузионной областью. Когда транзистор М2 сброса включается посредством сигнальной линии 1204 сброса, напряжение плавающей диффузионной области сбрасывается на напряжение Vdd электропитания.
Вторая микросхема 121 включает в себя расположенный на ней блок 1211 аналого-цифрового преобразования столбца, блок 1211 аналого-цифрового преобразования столбца соединен с сигнальными линиями 1202-а или 1202-b столбца. Далее, вторая микросхема 121 включает в себя схему 1212 сканирования строк, схемы 1213-а и 1213-b сканирования столбцов, блок 1214 управления тактированием и горизонтальные сигнальные линии (блоки вывода) 1215-а и 1215-b, расположенные на ней.
Блок 1214 управления тактированием управляет операцией тактирования схемы 1212 сканирования строк, схем 1213-а и 1213-b сканирования столбцов, и блоку 1211 аналого-цифрового преобразования столбца под управлением блока 1108 управления системой. Схема 1212 сканирования строк сканирует каждую строку, в то время как схемы сканирования столбцов 1213-а и 1213-b сканируют каждый столбец, соответственно.
Горизонтальные сигнальные линии 1215-a и 1215-b передают выводимые сигналы (сигналы изображения) блока 1211 аналого-цифрового преобразования столбца на основе тактирования, управляемого в каждой из сканирующих столбцы схем 1213-а и 1213-b сканирования столбцов. Как следствие этого, сигнал изображения для визирования по экрану (второй сигнал изображения или сигнал изображения для отображения) выводится на сигнальную линию 1202-а столбца, а сигнал изображения для определения оценки захвата изображения (первый сигнал изображения) выводится на сигнальную линию 1202-b столбца.
На Фиг. 13 строки с номером строки 1 и 2 (первая группа пикселей) используются для захвата изображения для определения значения оценки захвата изображения, в то время как строки с номерами с 3 по 8 (вторая группа пикселей) используется для захвата изображения для визирования по экрану. В проиллюстрированном примере, считывание/сканирование выполняется последовательно на основании строк, и каждые восемь строк постоянно сканируются для того, чтобы быть считанными.
При захвате изображений для определения значения оценки захвата изображения, производится пропуск считывания 3 из 4 вертикальных пикселей одного цвета, так как основное значение придается частоте кадров. В то же время, при изображении для визирования по экрану, пропускается считывание 1 из 4 вертикально расположенных пикселей одного цвета и 3 пикселя добавляются, так как основное значение придается качеству изображения. Иными словами, при захвате изображения для определения значения оценки захвата изображения первая группа пикселей считывается на первой частоте кадров. При захвате изображений для визирования по экрану, вторая группа пикселей считывается на второй частоте кадров, которая меньше, чем первая частота кадров.
Как описано далее, захват изображения для определения значения оценки захвата изображения и захват изображений для визирования по экрану разделяются на основе строк, так что сигналы изображений могут быть получены при различном времени хранения заряда при частоте кадров, различающейся по размеру данных.
Вывод сигнала напряжения (аналогового сигнала) на сигнальные линии 1202-а и 1202-b столбца преобразуется из аналогового сигнала в цифровой сигнал (сигнал изображения) в блоке 1211 аналого-цифрового преобразования столбца, проиллюстрированного на Фиг. 12А и 12В. Сигнал изображения, который является выводом из блока 1211 аналого-цифрового преобразования столбца, считывается и выводится из блока 1211 аналого-цифрового преобразования столбца на горизонтальную сигнальную линию 1215-a или 1215-b схемой 1213-а или 1213-b сканирования столбцов (первый блок считывания, второй блок считывания).
Далее, операция по определению оптимального значения оценки захвата изображения для операции автоматической фокусировки (значение оценки автоматической фокусировки)как пример значения оценки захвата изображения будет описана ссылаясь на Фиг. 14А и 14В.
Фиг. 14А является диаграммой тактирования для определения значения оценки автоматической фокусировки (значение оценки автоматической фокусировки) изображения для определения значения оценки захвата изображения в качестве результата описанного далее определения композиции. Как проиллюстрировано на Фиг. 14А, тактирование захвата изображения обусловлено сигналом вертикальной синхронизации. Когда камера переходит в режим оценки автоматической фокусировки, блок 1108 управления системой заставляет сигнал, управляющий автоматической фокусировкой, повышаться (до уровня H) на заднем фронте сигнала вертикальной синхронизации в момент Т0. Далее, при возрастании сигнала вертикальной синхронизации, блок 1108 управления системой запускает и выполняет операцию захвата изображения для как сигнала отображения изображения, так и сигнала определения значения оценки захвата изображения одновременно при синхронизации сигналом вертикальной синхронизации.
В период с Т0 по TF1, сигнал изображения для оценки захвата изображения, считываемый с блока 120 пикселей посредством горизонтальной сигнальной линии 1215-b, вводится в блок 1106 определения значения оценки захвата изображения. После этого, в период с TF1 по TF2, рассчитывается значение оценки автоматической фокусировки. Значение оценки автоматической фокусировки рассчитывается в соответствии с тактированием, управляемым блоком 1108 управления системой на основе информации о контрасте и информации о разности фаз, полученной из сигнала изображения для определения значения оценки захвата изображения, которое выводится из датчика 1102 изображений. Далее, в период с TF2 по TF3, блок 1106 определения значения оценки захвата изображения выводит значение оценки автоматической фокусировки в блок 1108 управления системой.
В проиллюстрированном примере, во время одного сигнала вертикальной синхронизации захватывается состоящее из одного кадра изображение для визирования по экрану, в то время как захватывается изображение для определения значения оценки автоматической фокусировки (сканирование автоматической фокусировки), состоящее из трех кадров. Когда блок 1108 управления системой переводит сигнал вертикальной синхронизации на уровень L, оценка автоматической фокусировки во время состоящего из одного кадра изображения для визирования по экрану является завершенной.
Блок 1108 управления системой сравнивает значение автоматической фокусировки с ожидаемым значением заданной автоматической фокусировки, описанным ниже. Если значение оценки автоматической фокусировки удовлетворяет заданному условию оценки в отношении ожидаемого значения автоматической фокусировки, то блок 1108 управления системой заставляет сигнал управления автоматической фокусировкой угаснуть (момент Т1). Как только сигнал управления автоматической фокусировкой угас, прекращается лишь захват изображения для оценки автоматической фокусировки, а захват изображений для визирования по экрану продолжается.
Фиг. 14В является диаграммой тактирования для определения значения оценки автоматической фокусировки из изображения для визирования по экрану в соответствии с результатом определения композиции, описанного далее.
Как проиллюстрировано на Фиг. 14А, тактирование захвата изображения обусловлено сигналом вертикальной синхронизации. Когда установлен режим оценки автоматической фокусировки, блок 1108 управления системой заставляет сигнал управления автоматической фокусировкой подняться (до уровня H) при угасании сигнала вертикальной синхронизации в момент Т0. Далее, как только сигнал вертикальной синхронизации поднялся, блок 1108 управления системой выполняет операцию захвата изображения только для сигнала для отображения изображения при синхронизации сигналом вертикальной синхронизации.
В период с Т0 по TF4, сигнал изображения для визирования по экрану, считываемый с пикселей 1201 посредством 1215-a, вводится в блок 1106 определения значения оценки захвата изображения и блок 1103 обработки сигнала изображения. В период с TF4 по TF5 рассчитывается значение оценки автоматической фокусировки. Блок 1106 определения значения оценки захвата изображения рассчитывает значение оценки автоматической фокусировки в соответствии с тактированием, управляемым блоком 1108 управления системой на основе информации о контрасте и информации о разности фаз, получаемой из сигнала изображения для визирования по экрану, который выводится из датчика 1102 изображений. Далее, в период с TF5 по TF6, блок 1106 определения значения оценки захвата изображения выводит значение оценки автоматической фокусировки в блок 1108 управления системой.
В проиллюстрированном примере, во время одного сигнала вертикальной синхронизации, захватывается изображение для визирования по экрану, состоящее из одного кадра, а изображение для определения значения оценки автоматической фокусировки (сканирование автоматической фокусировки) не захватывается. Когда блок 1108 управления системой переводит сигнал вертикальной синхронизации на уровень L, оценка автоматической фокусировки за время одного кадра изображения для визирования по экрану является завершенной.
Блок 1108 управления системой сравнивает значение оценки автоматической фокусировки, полученное из изображения для визирования по экрану с ожидаемым значением заданной автоматической фокусировки, описанным ниже. Если значение оценки автоматической фокусировки удовлетворяет заданному условию оценки в отношении ожидаемого значения автоматической фокусировки, сигнал управления автоматической фокусировкой заставляют угаснуть (момент Т7). Как только сигнал управления автоматической фокусировкой угасает, операция определения оценки автоматической фокусировки прекращается, а захват изображений для визирования по экрану продолжается.
Как проиллюстрировано на Фиг. 14А, в настоящем варианте выполнения для изображений для определения значения оценки захвата изображения может быть установлена более высокая частота кадров, чем для операции визирования по экрану. Соответственно, отражением значения оценки захвата изображения на устройстве захвата изображения можно управлять быстрее, чем раньше.
Тем не менее, устройство захвата изображения имеет предел отслеживания при темной композиции из-за управления экспозицией, установленной программной диаграммой. Соответственно, изображение для определения значения оценки захвата изображения с высокой частотой кадров и изображение для визирования по экрану с низкой частотой кадров отличаются пределом отслеживания при темной композиции из-за управления экспозицией. По настоящему варианту выполнения, разность между тремя состояниями возникает в пределе отслеживания при темной экспозиции.
Блок 1107 определения композиции определяет особенности фотографируемой композиции исходя из величины экспозиции, вычисленной из установленного значения чувствительности, скорости затвора и тому подобного, которые установлены блоком 1108 управления системой как условия фотографирования (экспозиции) во время фотографирования изображения для визирования по экрану. Блок 1106 определения значения оценки захвата изображения определяет значение оценки захвата изображения либо по изображению для определения значения оценки захвата изображения, либо по изображению для визированию по экрану в соответствии с результатами определения блока 1107 определения композиции.
Функционирование устройства захвата изображения в режиме оценки автоматической фокусировки по четвертому варианту выполнения будет подробно описано далее со ссылкой на блок-схему на Фиг. 15.
Необходимо отметить, проиллюстрированная блок-схема выполняется под управлением блока 1108 управления системой. Для описания, значение оценки захвата изображения, определенное по изображению для определения значения оценки захвата изображения, определено как AF_Kα, а значение оценки захвата изображения, определенное по изображению для визирования по экрану, определено как AF_Kβ.
После того, как электропитание было включено и ряд начальных настроек был произведен пользователем (этап S1502), режим камеры меняется на функциональный режим, такой, как режим визирования по экрану и запись движущегося изображения, и начинается фотографирование (этап S1520).
Блок 1108 управления системой определяет, задействован ли режим оценки автоматической фокусировки (этап S1502). Вкратце, блок 1108 управления системой определяет, установлен ли режим автоматической фокусировки. Если режим оценки автоматической фокусировки не задействован (НЕТ на этапе S1520), то блок 1108 управления системой запускает только захват изображения визирования по экрану (этап S1520), и переходит к этапу S1521, описанному ниже.
Если режим оценки автоматической фокусировки определен как задействованный (ДА на этапе S1503), то блок 1108 управления системой включает сигнал управления автоматической фокусировкой (уровень H)(этап S1504). Далее, блок 1108 управления системой заменяет 0 на переменную n для подсчета количества захватов изображения для оценки автоматической фокусировки (этап S1505). Далее, на этапе S1506, блок 1108 управления системой определяет величину S экспозиции условия захвата изображения для осуществления фотографирования с визированием по экрану.
Далее, блок 1107 определения композиции сравнивает величину E экспозиции, определяемый на этапе S1506, с ожидаемым значением Ev величины экспозиции (определение условий захвата изображения). Блок 1108 управления системой определяет, удовлетворяет ли величина экспозиции при фотографировании с визированием по экрану Формуле (1) по отношению к ожидаемому значению Ev в настройках экспозиции, то есть, удовлетворяется ли заданное условие чувствительности (этап S1507).
E<Ev (1)
Если величина Ev экспозиции при визировании по экрану удовлетворяет Формуле (1) (ДА), то операция переходит к этапу S1508 для запуска захвата изображения для определения значения оценки автоматической фокусировки.
Далее, как описано на Фиг. 14А, блок 1108 управления системой запускает захват изображения для оценки автоматической фокусировки (этап S1508). После запуска захвата изображения для оценки автоматической фокусировки, блок 1108 управления системой увеличивает переменную n на 1 (этап s1509). Далее, под управлением блока 1108 управления системой, блок 1106 определения значения оценки захвата изображения определяет значение AF_Kα оценки автоматической фокусировки при захвате изображения для автоматической фокусировки (этап S1510).
Далее, блок 1108 управления системой определяет, удовлетворяет ли значение AF_Kα оценки автоматической фокусировки Формуле (2) в отношении ожидаемых значений K_minα и K_maxα автоматической фокусировки, то есть, удовлетворяет ли значение AF_Kα оценки автоматической фокусировки заданному условию оценки или нет (этап S1511).
K_minα<AF_Kα<K_maxα (2)
где ожидаемые значения K_minα и K_maxα оценки автоматической фокусировки установлены как ожидаемое минимальное значение и ожидаемое максимальное значение значения оценки автоматической фокусировки. Эти значения заранее записаны в блоке 1108 управления на этапе проектировки или на этапе настройки устройства захвата изображения.
Если значение AF_Kα оценки автоматической фокусировки не удовлетворяет Формуле (2) (НЕТ на этапе S1511), то блок 1108 управления системой рассчитывает величину ответного управления на основе вышеописанного значения AF_Kα оценки автоматической фокусировки. После этого блок 1108 управления системой выполняет управление приводом блока 1105 управления приводом объектива в соответствии с величиной ответного управления, чтобы привести в действие фокусирующую линзу, включенную в объектив 1101 (этап S1512).
Далее, блок 1108 управления определяет, является ли переменная (количество раз захвата изображения для автоматической фокусировки) n равной заданному числу (в данном случае 3) (этап S1513). Если количество раз, которое изображение для автоматической фокусировки было захвачено, менее 3 (НЕТ на этапе S1511), то блок 1108 управления системой возвращается к обработке этапа S1510, и выполняет захват изображения для оценки автоматической фокусировки. Наоборот, если количество раз захвата изображения для оценки автоматической фокусировки составляет 3 (Да на этапе S1513), блок 1108 управления системой возвращается к обработке этапа S1505 и устанавливает количество раз n, которое были захвачены изображения для оценки автоматической фокусировки, равным нулю.
Если значение AF_Kα оценки автоматической фокусировки удовлетворяет Формуле (2) (ДА на этапе S1511), то блок 1108 управления системой выключает сигнал (уровень L) управления автоматической фокусировкой (этап S1514) и прерывает захват изображения для оценки автоматической фокусировки элементом 1102 захвата изображения (этап S1515). Далее, блок 1108 управления системой заставляет операцию перейти к этапу S1522.
Если величина E экспозиции изображения для визирования по экрану не удовлетворяет Формуле (1) на этапе S1507 (Нет), функция переходит к этапу S1516, и значение AF_Kβ обнаруживается в захваченном изображении для визирования по экрану. Далее, блок 1108 управления системой определяет, удовлетворяет ли значение AF_Kβ оценки автоматической фокусировки Формуле (3) в отношении ожидаемых значений K_minβ и K_maxβ автоматической фокусировки или нет, то есть удовлетворяет ли значение AF_Kβ оценки автоматической фокусировки заданному условию оценки (этап S 1517).
K_minβ<AF_K<K_maxβ (3)
где ожидаемые значения K_minβ и K_maxβ автоматической фокусировки установлены как ожидаемое минимальное значение и ожидаемое максимальное значение значения оценки автоматической фокусировки. Эти значения заранее записаны в блок 1108 управления системой на этапе проектирования или на этапе настройки устройства захвата изображения.
Если значение AF_Kβ автоматической фокусировки не удовлетворяет Формуле (3) (НЕТ на этапе S1517), то блок 1108 управления системой рассчитывает величину ответного управления в соответствии с вышеописанным значением AF_Kβ оценки автоматической фокусировки. После этого блок 1108 управления системой осуществляет управление приводом блока 1105 управления приводом объектива в соответствии с величиной ответного управления для приведения в действие фокусирующей линзы, входящей в состав объектива 1101 (этап S1518), и операция переходит к этапу S1522.
Если значение AF_Kβ автоматической фокусировки удовлетворяет Формуле (3) (Да на этапе S1517), то блок 1108 управления системой выключает сигнал (уровень L) управления автоматической фокусировкой (этап S1519), и операция переходит к этапу S1522. На этапе S1522, если есть инструкция (ДА) о завершении операции визирования по экрану, то операция визирования по экрану является выполненной. Если визирование по экрану движущегося изображения продолжается (Нет), то операция возвращается на этап S1503 и операция автоматической фокусировки выполняется во время того, как выполняется операция визирования по экрану.
Как описано выше, настоящий вариант выполнения основан на устройстве захвата изображения, которое включает в себя элемент захвата изображения, способный выполнять захват изображения для визирования по экрану и захват изображения для определения значения оценки захвата изображения одновременно за время одного кадра. В соответствии с результатом определения композиции, основанного на условии экспозиции, во время захвата изображения для визирования по экрану, изображение для определения значения оценки автоматической фокусировки выбирается из изображения для значения оценки автоматической фокусировки и изображения для визирования по экрану.
Как следствие этого, когда объект фотографируется при освещенной композиции, временная задержка при выполнении оценки автоматической фокусировки может быть снижена, а при темной композиции значение оценки автоматической фокусировки может быть улучшено. Более того, в настоящем варианте выполнения подготовлены разные ожидаемые значения автоматической фокусировки, подлежащие использованию при сравнении со значениями оценки автоматической фокусировки, для изображения для значения оценки автоматической фокусировки и изображения для визирования по экрану.
В настоящем варианте выполнения, несмотря на то, что значение оценки автоматической фокусировки описывается как пример значения оценки захвата изображения, иные значения оценки захвата изображения, такие, как значение оценки баланса белого (данные о балансе белого) и значение оценки автоматической экспозиции (данные управления экспозицией), также могут быть определены как оптимальное значение оценки при схожей конфигурации. В случае со значением оценки баланса белого или значением оценки автоматической фокусировки, изображение для определения оценки захвата изображения и изображение для визирования по экрану переключают на определение значения оценки в соответствии с результатом оценки композиции на этапе S1507. В результате, может быть снижена временная задержка и оптимизирована точность оценки баланса белого или автоматической экспозиции.
ПЯТЫЙ ВАРИАНТ ВЫПОЛНЕНИЯ
Четвертый вариант выполнения описал конструкцию, сконфигурированную для определения фотографической композиции на основании только информации об экспозиции и для определения, в соответствии с результатом определения, значения оценки автоматической фокусировки из одного из изображения для значения оценки автоматической фокусировки или изображения для визирования по экрану. Настоящий вариант выполнения выполнен с возможностью определения фотографической композиции на основе не только информации об экспозиции, но также информации о лице, информации о яркости и информации о цветности для определения значения оценки захвата изображения с большей точностью.
Устройство захвата изображения по пятому варианту выполнения настоящего изобретения будет описано далее со с ссылкой на Фиг. с 16 по 18. Необходимо отметить, проиллюстрированные компоненты, идентичные компонентам по четвертому варианту выполнения обозначены теми же ссылочными позициями, чтобы пропустить их описания.
Фиг. 16 является блок-схемой устройства захвата изображения по настоящему варианту выполнения. Настоящий вариант выполнения схож по конфигурации с четвертым вариантом выполнения за исключением того, что обеспечены блок 1601 определения информации о лицах, блок 1602 определения информации о яркости и блок 1603 определения информации о цветности.
Блок 1601 определения информации о лицах выполняет обработку вывода сигнала изображения из датчика 1102 изображений для определения лица человека или животного (например, домашнего животного) в изображении сфотографированного кадра. Блок 1601 определения информации о лицах также выводит в блок 1107 определения композиции определенную область лица в качестве информации о лице.
Блок 1602 определения информации о яркости выполняет обработку определения яркости на данных изображения, выведенных из блока 1103 обработки сигналов изображения. При обработке, изображение кадра изображения разделяют на множество областей и получают среднюю яркость каждой области. Блок 1602 определения информации о яркости высчитывает, используя эту среднюю яркость, информацию о яркости, такую, как разность яркостей между центральной частью и периферийной частью кадра изображения и значение яркости в центре. Информация о яркости, определенная блоком 1602 определения информации о яркости, выводится в блок 1107 определения композиции.
Блок 1603 определения информации о цветности выполняет обработку определения цветности на данных изображения, выведенных из блока 1103 обработки сигналов изображения, для определения информации о цветности, такой, как средняя цветовая насыщенность и область высокой цветовой насыщенности. Информация о цветности, определенная блоком 1603 определения информации о цветности, выводится в блок 1107 определения композиции.
Блок 1107 определения композиции определяет фон и объект на фотографической композиции по данным изображения, обработанным блоком 1103 обработки сигналов на основе информации, полученной из блока 1601 определения информации о лицах, блока 1602 определения информации о яркости и блока 1603 определения информации о цветности. Необходимо отметить, что вся информация, присланная из блока 1601 определения информации о лицах, блока 1602 определения информации о яркости и блока 1603 определения информации о цветности временно хранится в блоке 1107 определения композиции и обновляется по мере необходимости.
Далее будет описана операция по определению фотографической композиции аппаратом захвата изображения по настоящему варианту выполнения.
Блок 1107 определения композиции определяет фон фотографической композиции по сигналу изображения для визирования по экрану, выводимому из датчика 1102 изображений, с использованием информации о яркости, определенной блоком 1602 определения яркости, и информации о цветности, определенной блоком 1603 определения информации о цветности. Далее, блок 1107 определения композиции определяет объект на фотографической композиции с использованием информации о лицах, определенной блоком 1601 определения лиц.
Сначала будет описано определение фона фотографической композиции.
Блок 1107 определения композиции анализирует информацию о яркости, определенную блоком 1602 определения яркости, и информацию о цветности, определенную блоком 1603 определения информации о цветности, и определяет, является ли зона области цвета синего неба на изображении равной или больше порога или нет. Если зона области цвета синего неба на изображении равна или больше, чем порог, блок 1107 определения композиции определяет, что фоном фотографической композиции является синее небо. Также блок 1107 определения композиции анализирует информацию о яркости из блока 1602 определения яркости и информацию о цветности из блока 1603 определения информации о цветности. В результате, если блок 1107 определения композиции определяет, что яркость изображения удовлетворяет заданному условию распределения или отклонения гистограммы, то фон фотографической композиции определяется как ночной вид. Например, яркость изображения при темной композиции, такой, как ночной вид, в основном представлена участками низкой яркости с участками высокой яркости, встречающимися единично. Блок 1107 определения композиции также анализирует информацию о яркости из блока 1602 определения яркости и информацию о цветности из блока 1603 определения информации о цветности, и определяет, являются ли средняя цветовая насыщенность и зона области высокой цветовой насыщенности на изображении равной или превосходящей порог или нет. Если эти значения равны или превосходят порог, то блок 1107 определения композиции определяет, что фотографическая композиция является резкой.
Далее будет описана операция по определению объекта фотографической композиции.
Блок 1107 анализирует информацию о лице из блока 1601 определения лиц. Если в сигнале изображения было определено лицо, то блок 1107 определения композиции определяет, что объект в фотографической композиции является человеком.
Блок 1107 определения композиции определяет и фон, и объект композиции, как описано выше, комбинирует эти результаты определения и выводит комбинированный один результат определения в блок 1108 управления системой.
Далее будет описана детализированная работа устройства захвата изображения согласно настоящему варианту выполнения в режиме оценки автоматической фокусировки со ссылкой на блок-схему последовательности операций по Фиг. 17. Для описания детализированной работы по настоящему варианту выполнения значение определения информации об определении лица, определенное по изображению для визирования по экрану, задано как Xl, значение определения информации о яркости задано как Yl, а значение определения информации о цветности задано как Zl. Будут описаны только те аспекты работы, которые отличаются от четвертого варианта.
Блок 1107 определения композиции сравнивает значения определения каждой определенной информации с соответствующими ожидаемыми значениями: информацией X о лице, информацией Y о яркости и информации Z о цветности, и выбирает значение AF_Kα или AF_Kβ оценки автоматической фокусировки как проиллюстрировано на Фиг. 18. В соответствии с результатом выбора, определяется путь на этапе S1702.
На этапе S1701, блок 1601 определения лиц, блок 1602 определения яркости и блок 1603 определения информации о цветности определяют информацию о лице Xl, информацию о яркости Yl и информацию о цветности Zl по полученному изображению для визирования по экрану. На этапе S1702, значение оценки захвата изображения, которое отражается на дальнейшем фотографировании, определяется, как показано на таблице по Фиг. 18, по каждому из значений информации, определенных блоком 1107 определения композиции на этапе S1701 по изображению для определения значения оценки захвата изображения и по изображению для визирования по экрану.
Например, предположим, что соответственные значения информации находятся в соотношении как показано на одном примере ниже:
Значение информации о лице: Xl>X
Значение информации о яркости: Yl>Y
Значение информации о цветности: Zl>Z
В этом случае, на этапе S1702, запускается (то есть, выбор варианта ДА) захват изображения для определения значения оценки автоматической фокусировки, так что операция переходит к этапу S1508, а блок 1108 управления системой увеличивает переменную n на 1 (этап S1509). Дальнейшая обработка такая же, как и в четвертом варианте выполнения.
В качестве другого примера, предположим, что соответственные значения информации находятся в соотношении как показано ниже:
Значение информации о лице: Xl≤X
Значение информации о яркости: Yl≤Y
Значение информации о цветности: Zl≤Z
В этом случае, на этапе S1702 захват изображения для определения значения оценки автоматической фокусировки не запускается (то есть, выбирается вариант Нет), так что операция переходит к этапу S1516 для определения значения AF_Kβ оценки автоматической фокусировки по захваченному изображению для визирования по экрану. Дальнейшая обработка такая же, как и в четвертом варианте выполнения. Для другого определения композиции используется соотношение, которое указано на Фиг. 18.
Как описано выше, настоящий вариант выполнения основывается на устройстве захвата изображения, который включает в себя элемент захвата изображения, способный выполнять захват изображения для визирования по экрану и захват изображения для определения значения оценки захвата изображения одновременно за время одного кадра. В соответствии с результатом определения фотографической композиции на основе информации о яркости/цветности/лице, изображение для определения значения автоматической фокусировки выбирается из одного
из изображения для значения оценки автоматической фокусировки и изображения для визирования по экрану.
Как следствие этого, во время фотографирования объекта при светлой композиции временная задержка при выполнении оценки автоматической фокусировки может быть снижена, а при темной композиции может быть улучшена точность значения оценки автоматической фокусировки.
Более того, в настоящем варианте выполнения, когда выполняется определение композиции, информация о лице, информация о яркости и информация о цветности определяются по каждому из изображения для определения значения оценки захвата изображения и изображения для визирования по экрану. Однако, настоящее изобретение не ограничивается такой конфигурацией. Если определяется чувствительность, описанная в первом варианте выполнения, и результат такого определения используется как один из факторов определения композиции, то временная задержка при определении значения оценки автоматической фокусировки может быть еще более снижена, а скорость определения значения оценки автоматической фокусировки может быть дополнительно оптимизирована.
Кроме того, в настоящем варианте выполнения значение оценки захвата изображения определяется по захваченному изображению когда по меньшей мере две части информации из частей информации о лице, информации о яркости, и информации о цветности, которые необходимы для осуществления определения композиции, являются большими значениями информации. Однако, настоящее изобретение не ограничивается этим. Соответствующие значения информации могут быть взвешены в соответствии со значением оценки захвата изображения и могут быть сравнены.
ШЕСТОЙ ВАРИАНТ ВЫПОЛНЕНИЯ
Здесь описывается шестой вариант выполнения настоящего изобретения. Настоящий вариант выполнения выполнен с возможностью того, чтобы сформировать блок 1106 определения значения оценки захвата изображения не за пределами датчика 1102 изображений, а внутри него, как блок возбуждения пикселей на второй микросхеме 121 на Фиг. 12А.
Фиг. 19 является блок-схемой датчика 1102 изображений, включающего в себя блок определения значения оценки захвата изображения. На Фиг. 19 компоненты, идентичные таковым на Фиг. 12А и 12В обозначены идентичными ссылочными позициями.
На чертеже блок 1901 определения значения оценки захвата изображения выполнен с возможностью определения значения оценки автоматической фокусировки, такого, как значение (данные автоматической фокусировки) оценки автоматической фокусировки, и для вывода только определенного значения оценки в блок 1106 управления системой. Блок 1901 определения значения оценки захвата изображения функционирует в соответствии с тактированием, управляемым блоком 1108 управления системой на основании информации о контрасте и информации о разности фаз, которая получается из сигнала изображения, получаемого в элементе 1102 захвата изображения.
Переключатели 1902 и 1903 управляются блоком 1108 управления системой. Переключатели 1902 и 1903 сконфигурированы для переключения сигнала изображения для определения значения оценки захвата изображения и сигнала изображения для визирования по экрану на основе результата определения блоком 1107 определения композиции, так что один из сигналов выборочно вводится в блок 1901 определения значения оценки захвата изображения во время определения значения оценки захвата изображения. Переключатель 1902 предназначен для выбора места назначения для вывода сигналов пикселей соответствующих значению оценки захвата изображения, проиллюстрированному на Фиг. 13, при этом местом назначения является либо блок 1103 обработки сигналов, либо блок 1901 определения значения оценки захвата изображения. Переключатель 1903 является переключателем, который должен быть включен, когда сигналы пикселей, соответствующие строкам, которые подлежат выбору для визирования по экрану, проиллюстрированные на Фиг. 13, используются для значения оценки захвата изображения.
Работа датчика изображений на Фиг. 19, когда он используется в устройстве захвата изображения по четвертому варианту выполнения, будет описана со ссылкой на блок-схему по Фиг. 15.
На этапе S1503, запускается операция автоматической фокусировки. Как описано в четвертом варианте выполнения, если величина Ev экспозиции при визировании по экрану удовлетворяет Формуле (1) на этапе S1507 (ДА), то операция переходит к этапу S1508 и запускается захват изображения для определения значения оценки автоматической фокусировки. В этот момент переключатель 1902 соединен со стороной блока 1901 определения значения оценки захвата изображения, в то время как переключатель 1903 выключен.
После того, как оценка автоматической фокусировки запущена, блок 1108 управления системой увеличивает переменную n на 1 (этап S1509). После этого, блок 1901 определения значения оценки захвата изображения определяет значение AF_Kα оценки автоматической фокусировки по изображению для значения оценки автоматической фокусировки.
Если величина Ev экспозиции при визировании по экрану не удовлетворяет формуле (1) на этапе S1507 (Нет), то операция переходит на этап S1516. На этапе S1516, переключатель 1903 включается и блок 1901 определения значения оценки захвата изображения определяет значение AF_Kβ оценки автоматической фокусировки по сигналу изображения для визирования по экрану. В этот момент переключатель 1902 соединен со стороной блока 1103 обработки сигналов, но операция для значения оценки автоматической фокусировки не выполняется и сигналы пикселей не выводятся в блок обработки сигналов. Более того, так как блок 1901 определения значения оценки захвата изображения передает блоку 1108 управления системой только значение оценки автоматической фокусировки, количество данных, передающихся вовне, может быть уменьшено по сравнению с четвертым вариантом выполнения, так что потребление электроэнергии может быть снижено. Так как последующая операция является той же, что и в первом варианте выполнения, ее описание пропущено. Необходимо обратить внимание, что одна и та же операция применяется когда датчик изображений по Фиг. 19 используется для устройства захвата изображения по пятому варианту выполнения изобретений.
В вышеописанном шестом варианте выполнения блок определения значения оценки захвата изображения сформирован на датчике изображений, так что количество данных, передаваемых во время определения значения оценки захвата изображения по первому и второму вариантам выполнения может быть уменьшено. В результате, потребление электроэнергии может быть снижено.
ИНЫЕ ВАРИАНТЫ ВЫПОЛНЕНИЯ
Варианты выполнения настоящего изобретения также могут быть исполнены компьютером системы или устройства, который считывает и выполняет выполняемые компьютером инструкции, записанные на носителе хранения (например, невременном машиночитаемом носителе хранения) для выполнения функций одного или более из вышеописанных вариантов выполнения настоящего изобретения, и способом, выполняемым компьютером системы или устройства посредством, например, считывания и выполнения выполняемых компьютером инструкций из носителя хранения для выполнения функций одного или больше из вышеуказанных вариантов выполнения. Компьютер может включать в себя один или более центральных процессоров, микропроцессоров или иных схем, и может включать в себя сеть, состоящую из отдельных компьютеров или процессоров отдельных компьютеров. Выполняемые компьютером инструкции могут быть предоставлены компьютеру, например, из сети или с носителя хранения. Носитель информации может включать в себя, например, один или более жестких дисков, оперативное запоминающее устройство, постоянное запоминающее устройство, хранилище распределенных компьютерных систем, оптический диск (такой, как компакт-диск (CD), цифровой многоцелевой диск (DVD) или Блю-рей диск (BD)™), флеш-память, карта памяти и им подобные.
Хотя настоящее изобретение было описано со ссылкой на варианты выполнения, необходимо понимать, что изобретение не ограничивается раскрытыми вариантами выполнения. Объем следующих ниже пунктов должен отвечать наиболее широкой интерпретации таким образом, чтобы покрывать все такие модификации и эквивалентные конструкции и функции.
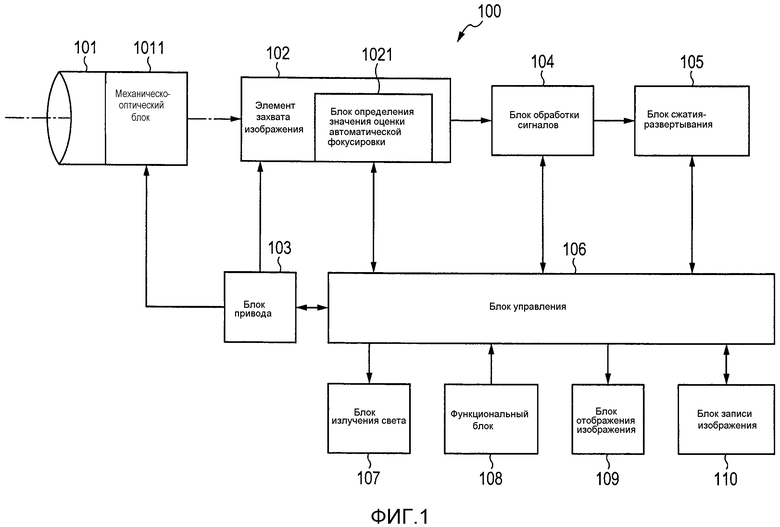
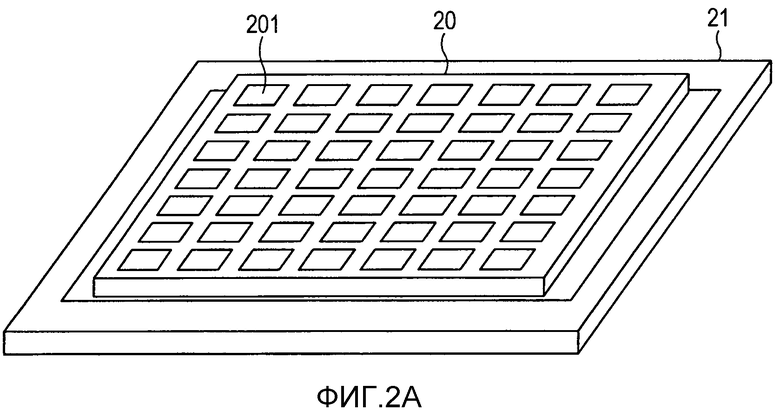
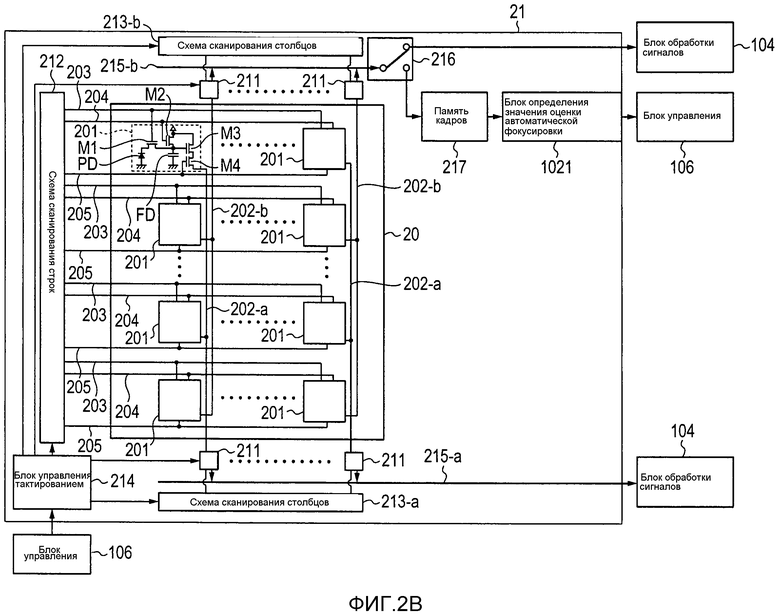
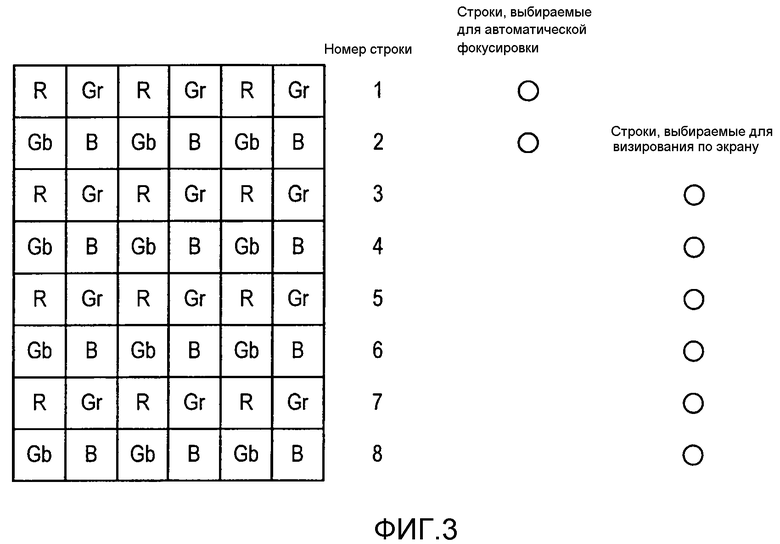
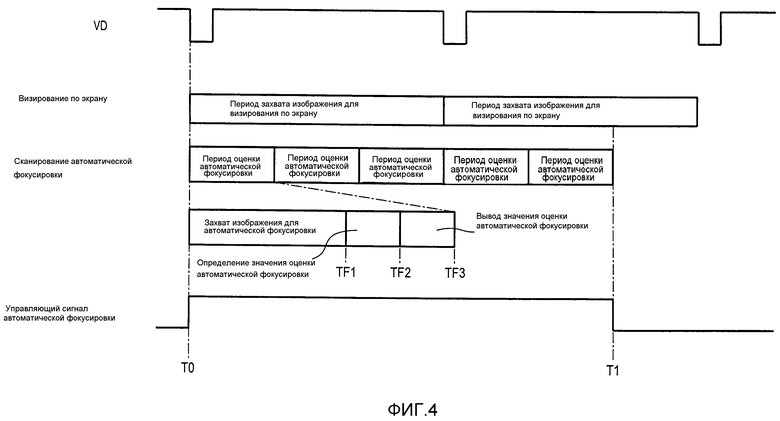
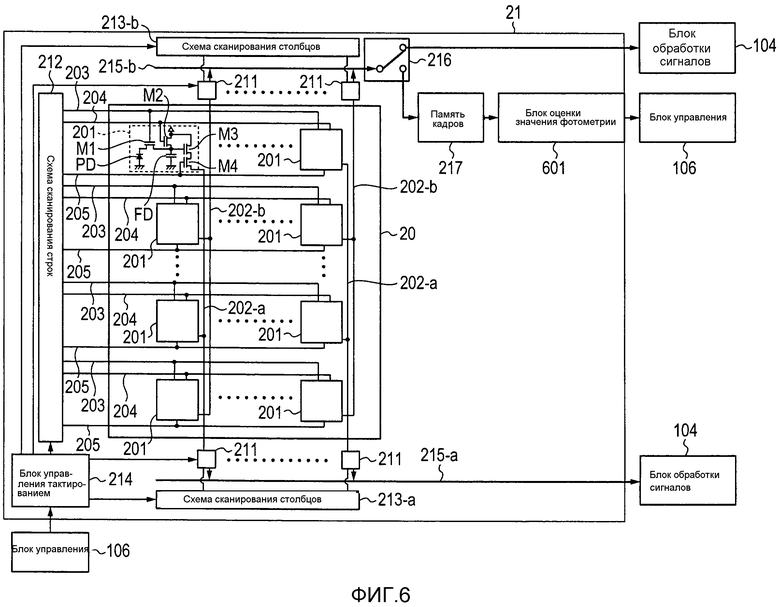
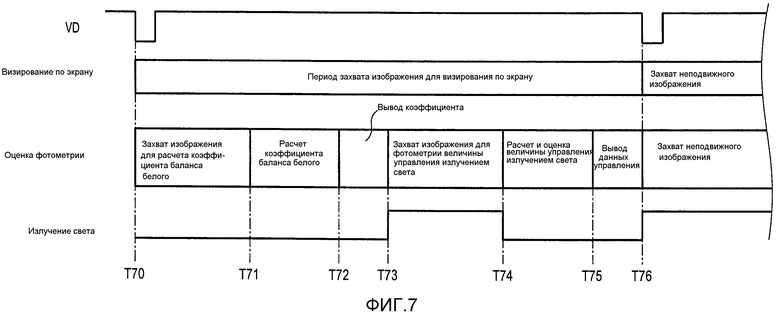
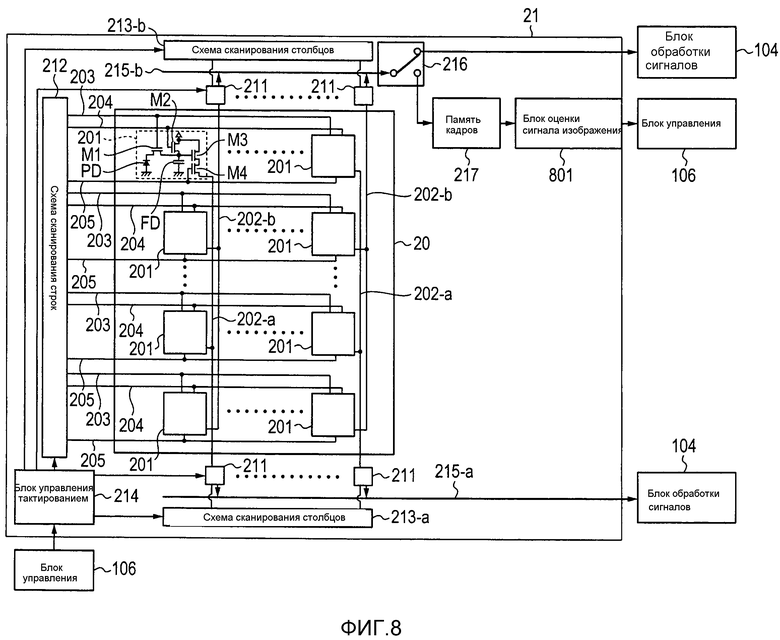
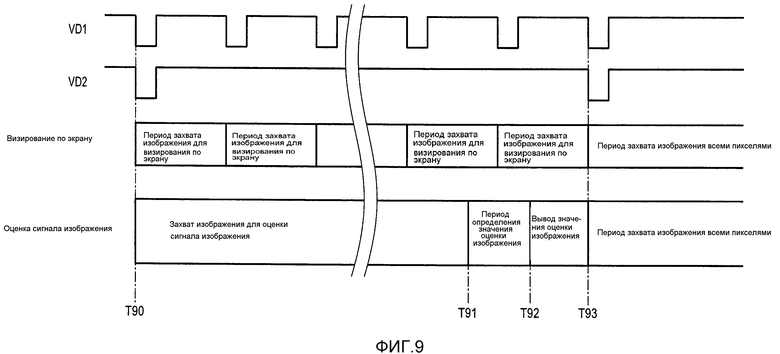
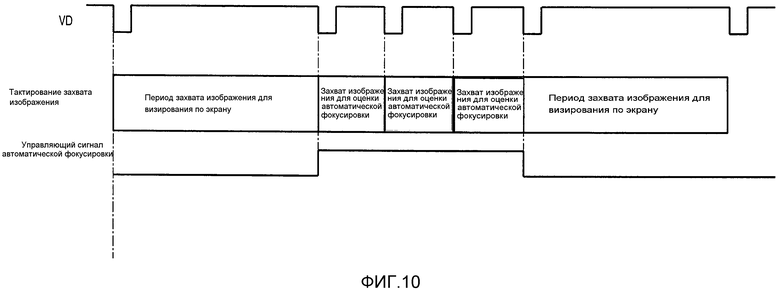
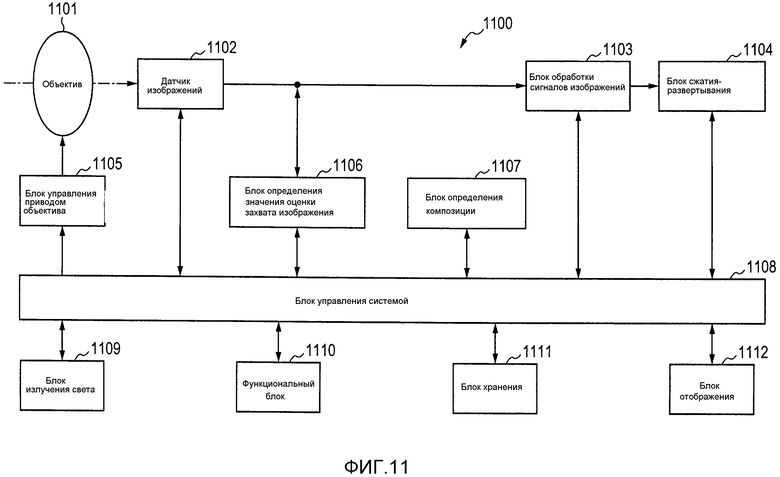
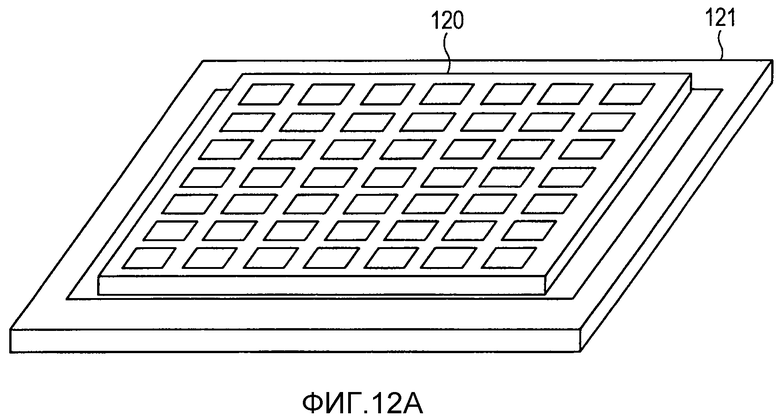
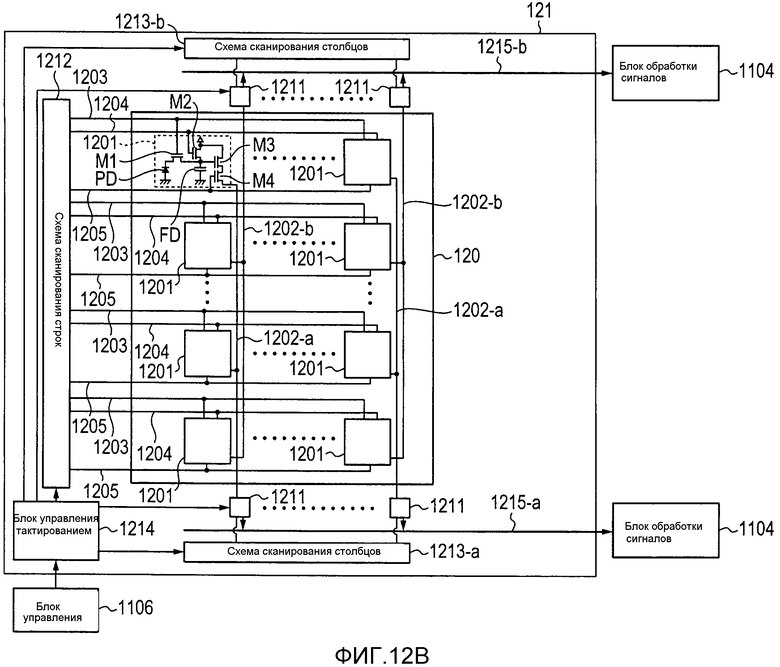
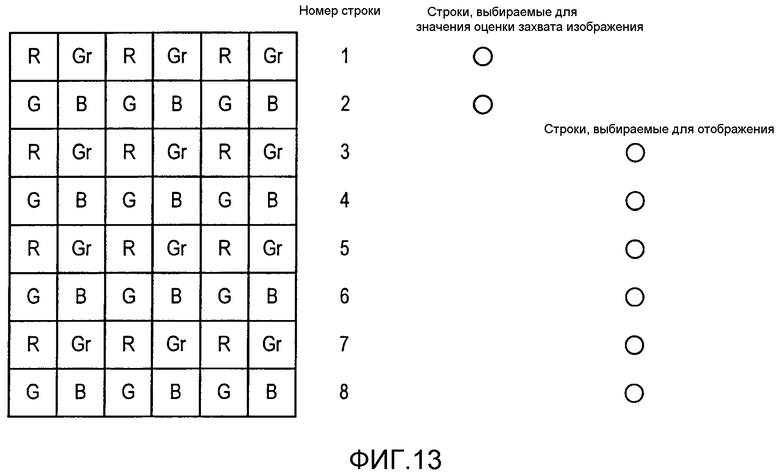
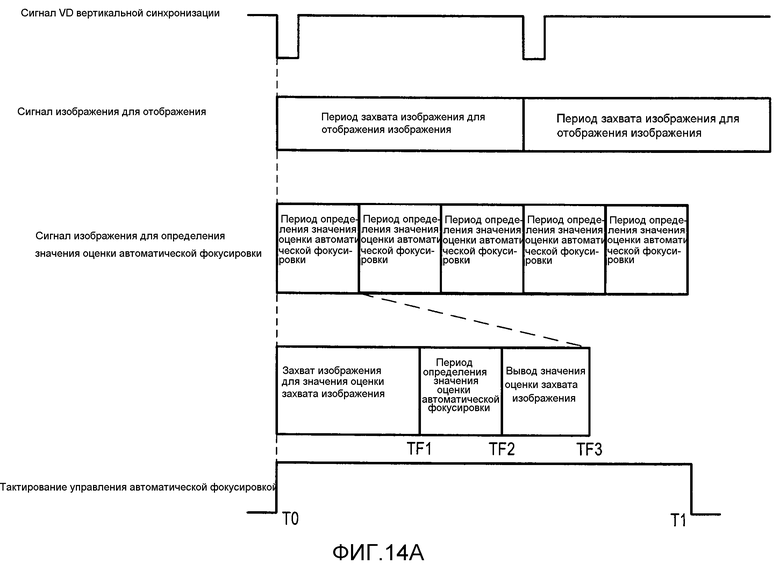
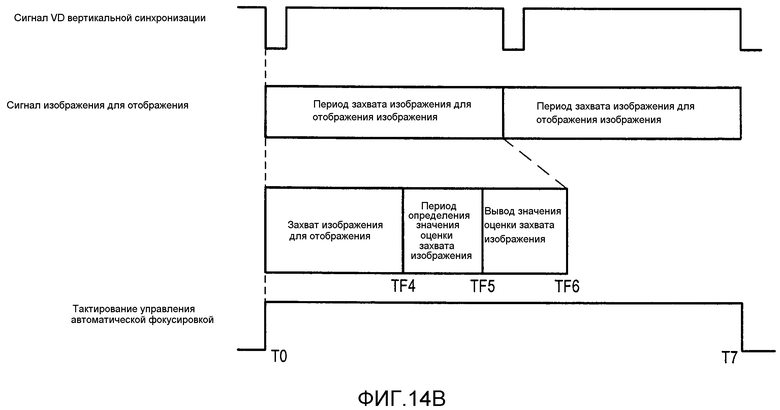

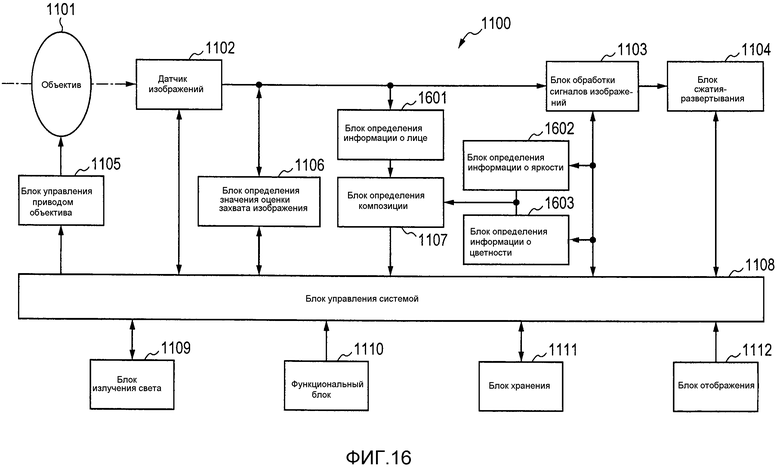
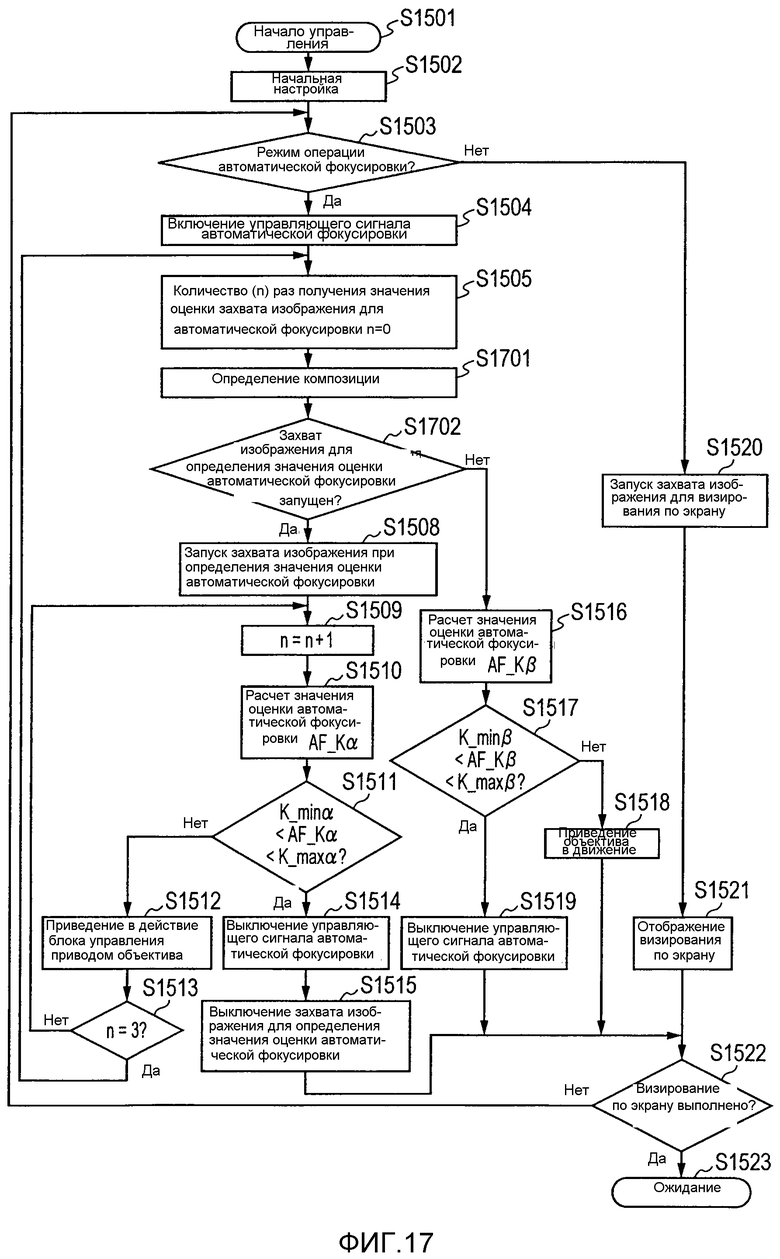
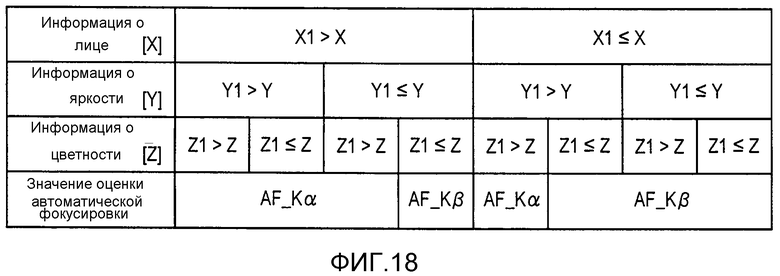
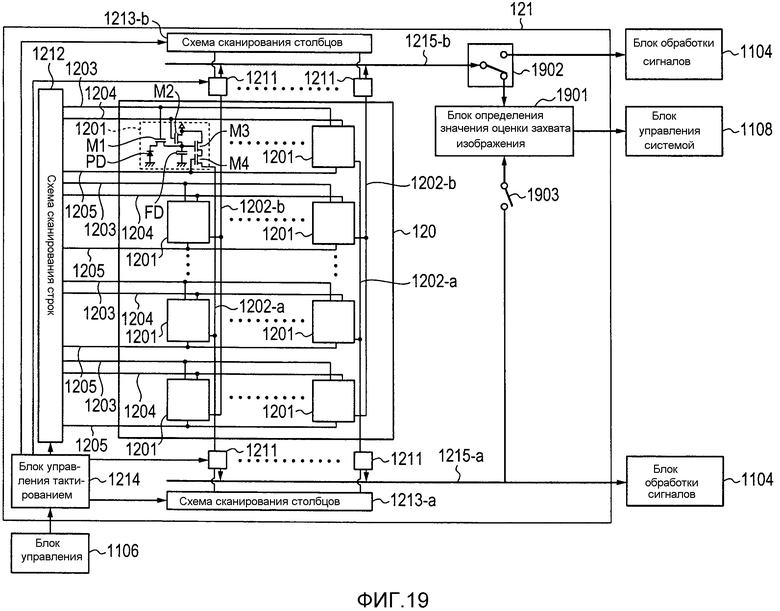
Изобретение относится к устройствам захвата изображений. Техническим результатом является предоставление элемента захвата изображения и устройства захвата изображения, которые уменьшают время переноса данных и устраняют потерю качества изображения. Результат достигается тем, что элемент захвата изображения генерирует значение оценки автоматической фокусировки, подлежащее использованию для захвата изображения в соответствии с сигналом изображения, соответствующим сигналу напряжения, полученному от первой группы пикселей среди множества пикселей. Элемент захвата изображения дополнительно выводит сигнал изображения, соответствующий сигналу напряжения, полученному от второй группы пикселей среди множества пикселей, в качестве сигнала отображения для визирования по экрану для отображения изображения. В соответствии со значением оценки автоматической фокусировки блок управления управляет механическо-оптическим блоком, имеющим фокусирующую линзу, и выполняет отображение для визирования по экрану на блоке отображения изображения в соответствии с сигналом отображения для визирования по экрану. 5 н. и 11 з.п. ф-лы, 22 ил.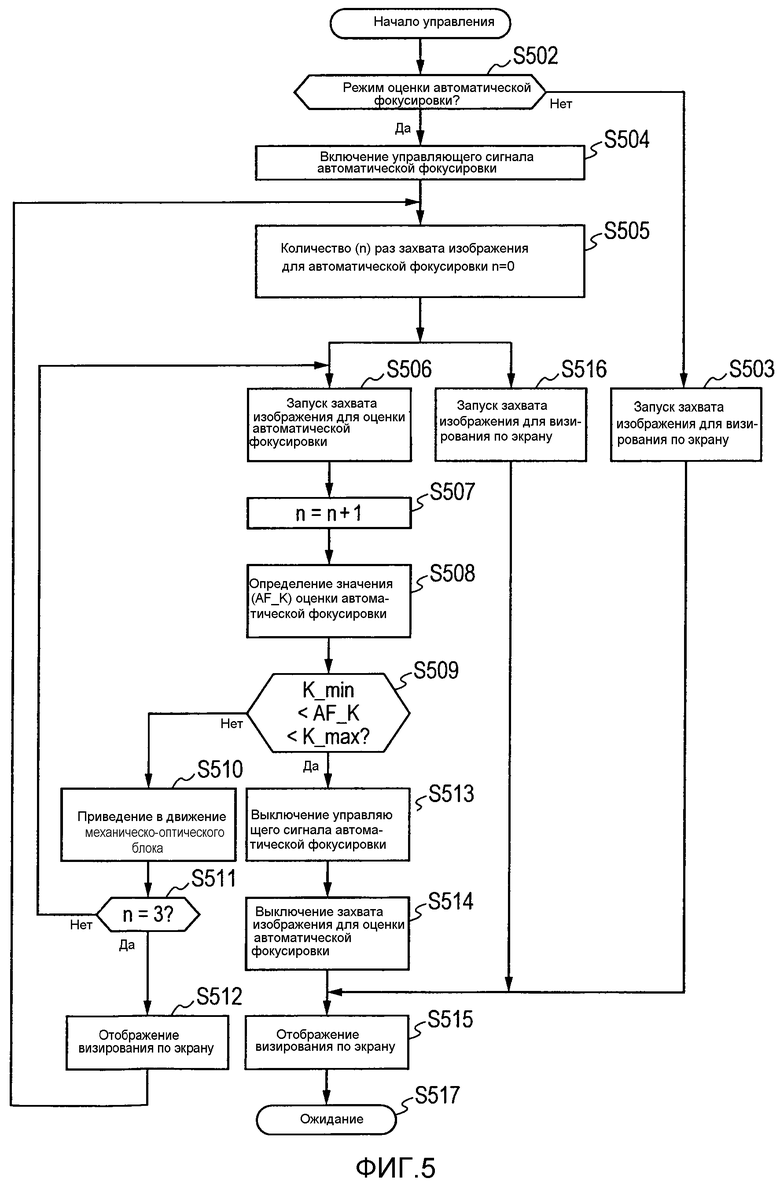
1. Элемент захвата изображения для захвата оптического изображения, сфокусированного на нем, и вывода сигнала изображения, соответствующего оптическому изображению, содержащий:
первый блок элемента, содержащий множество пикселей, расположенных в виде матрицы, который выводит сигнал напряжения, соответствующий оптическому изображению; и
второй блок элемента, который преобразует сигнал напряжения в цифровой сигнал для получения сигнала изображения,
причем второй блок элемента содержит:
блок генерации управляющей информации, который генерирует управляющую информацию, подлежащую использованию для захвата изображения в соответствии с первым сигналом изображения, который является сигналом изображения, полученным от первой группы пикселей среди множества пикселей, и
блок вывода, который выводит, в качестве сигнала отображения изображения для отображения изображения, второй сигнал изображения, который является сигналом изображения, полученным от второй группы пикселей среди множества пикселей.
2. Элемент захвата изображения по п. 1, в котором первая группа пикселей включает в себя пиксели из строк массива в матрице, которые отличаются от строк массива, включающих в себя пиксели из второй группы пикселей.
3. Элемент захвата изображения по п. 1, в котором первый блок элемента и второй блок элемента размещены в слоистой структуре и в котором первый блок элемента расположен на стороне, на которой принимается оптическое изображение.
4. Элемент захвата изображения по п. 1, в котором второй блок элемента содержит блок переключения, который выборочно обеспечивает первый сигнал изображения блоку генерации управляющей информации, и в котором блок переключения выполнен с возможностью, в состоянии подготовки к фотографированию перед выполнением захвата изображения, обеспечения первого сигнала изображения блоку генерации управляющей информации.
5. Элемент захвата изображения по п. 4, в котором при выполнении захвата изображения блок переключения дополнительно выполнен с возможностью обеспечения первого сигнала изображения в блок вывода и блок вывода выполнен с возможностью вывода первого сигнала изображения и второго сигнала изображения в качестве сигнала захвата изображения.
6. Устройство захвата изображения, содержащее:
элемент захвата изображения по п. 1;
блок управления, который управляет, при получении управляющей информации, захватом изображения в соответствии с управляющей информацией; и
блок управления отображением, который выполняет отображение для визирования по экрану в соответствии с сигналом отображения изображения.
7. Устройство захвата изображения по п. 6, дополнительно содержащее:
блок управления считыванием, который считывает первую группу пикселей с первой частотой кадров и считывает вторую группу пикселей со второй частотой кадров, которая меньше, чем первая частота кадров.
8. Устройство захвата изображения по п. 7, в котором блок управления считыванием выполнен с возможностью функционирования и в первом режиме захвата изображения для считывания первой группы пикселей и втором режиме захвата изображения для считывания второй группы пикселей.
9. Устройство захвата изображения по п. 8, в котором блок управления считыванием выполнен с возможностью запуска первого режима захвата изображения и второго режима захвата изображения одновременно.
10. Устройство захвата изображения по п. 6, в котором блок генерации управляющей информации выполнен с возможностью генерации, в качестве управляющей информации, значения оценки автоматической фокусировки для использования при выполнении управления автоматической фокусировкой и блок управления выполнен с возможностью выполнения управления приводом фокусирующей линзы в соответствии со значением оценки автоматической фокусировки.
11. Устройство захвата изображения по п. 8 или 9, в котором блок генерации управляющей информации выполнен с возможностью генерации, в качестве управляющей информации, значения оценки автоматической фокусировки для использования при выполнении управления автоматической фокусировкой.
блок управления выполнен с возможностью определения, удовлетворяет ли значение оценки автоматической фокусировки заранее определенному условию оценки или нет, и
если блок управления определяет, что условие оценки было удовлетворено, то блок управления считыванием выполнен с возможностью прерывания первого режима захвата изображения.
12. Устройство захвата изображения по п. 6, в котором блок генерации управляющей информации выполнен с возможностью генерации, в качестве управляющей информации, коэффициента баланса белого, подлежащего использованию при выполнении коррекции баланса белого, и блок управления выполнен с возможностью выполнения корректирующей обработки сигнала изображения, выведенного из элемента захвата изображения, в соответствии со сгенерированным коэффициентом баланса белого.
13. Устройство захвата изображения по п. 6, дополнительно содержащее:
блок излучения света, который излучает свет для подсветки объекта для захвата изображения;
причем блок генерации управляющей информации выполнен с возможностью генерации, в качестве управляющей информации, величины управления излучением света для управления величиной излучения света блока излучения света, и
блок управления выполнен с возможностью, когда захват изображения выполняется с использованием блока излучения света, побудить блок излучения света выполнить предварительное излучение для получения величины управления излучением света от блока генерации управляющей информации и затем побудить блок излучения света выполнить основное излучение света в соответствии с величиной управления излучением света для выполнения захвата изображения.
14. Устройство захвата изображения, содержащее:
элемент захвата изображения по п. 5, в котором блок генерации управляющей информации выполнен с возможностью генерации, в качестве управляющей информации, значения оценки автоматической фокусировки, подлежащего использованию при выполнении управления автоматической фокусировкой;
блок управления, который выполняет, при получении значения оценки автоматической фокусировки, управление приводом фокусирующей линзы в соответствии со значением оценки автоматической фокусировки; и
блок управления отображением, который выполняет отображение для визирования по экрану в соответствии с сигналом отображения изображения,
причем блок управления дополнительно выполнен с возможностью, когда установлен режим автоматической фокусировки для выполнения управления автоматической фокусировкой, управления блоком переключения для обеспечения первого сигнала изображения блоку генерации управляющей информации.
15. Способ для управления устройством захвата изображения, включающим в себя элемент захвата изображения по п. 1, причем упомянутый способ содержит:
управление, при получении управляющей информации, захватом изображения в соответствии с управляющей информацией; и
выполнение отображения для визирования по экрану в соответствии с сигналом отображения изображения.
16. Машиночитаемый носитель, заставляющий один или более процессоров, включенных в устройство захвата изображения по п. 1, выполнять способ управления устройством захвата изображения, содержащий:
управление, при получении управляющей информации, захватом изображения в соответствии с управляющей информацией; и
выполнение отображения для визирования по экрану в соответствии с сигналом отображения изображения.
| WO 2012093551 A1, 2012.07.12 | |||
| JP 2009141390 A, 2009.06.25 | |||
| US 2012300105 A1, 2012.11.29 | |||
| WO 2012020632 A1, 2012.02.16 | |||
| US 8098310 B2, 2012.01.17 | |||
| ТВЕРДОТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ СЪЕМКИ ИЗОБРАЖЕНИЯ И СПОСОБ ВОЗБУЖДЕНИЯ ЭТОГО УСТРОЙСТВА | 2011 |
|
RU2458478C1 |
| US 7953207 B2, 2011.05.31 | |||

