ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Изобретение относится к технологии для управления переключением режима движения гибридного электрического транспортного средства.
УРОВЕНЬ ТЕХНИКИ
[0002] Из недавно разработанных гибридных электрических транспортных средств известны некоторые транспортные средства с возможностью переключаться между EV-режимом, в котором транспортное средство движется посредством приводных моторов (электромоторов) и посредством использования электрической энергии, подаваемой из приводного аккумулятора, без активирования двигателя последовательным режимом, в котором транспортное средство движется посредством электромоторов при выработке электрической энергии посредством предписания двигателю приводить в действие генератор, и параллельным режимом, в котором транспортное средство движется посредством как двигателя, так и электромоторов.
[0003] В гибридном электрическом транспортном средстве, выполненном с возможностью движения в параллельном режиме, движущая сила может быть передана из двигателя на ведущие валы посредством трансмиссии и муфты. В параллельном режиме муфта сцепляется, и переключение передач трансмиссии управляется таким образом, чтобы передавать движущую силу на ведущие колеса.
Патентный документ 1 раскрывает гибридное электрическое транспортное средство, выполненное с возможностью автоматического переключения между EV-режимом, последовательным режимом и параллельным режимом в соответствии с состоянием заряда приводного аккумулятора и скоростью движения.
[0004] Патентный документ 1 также раскрывает технологию реализации переключения режима на параллельный режим, когда состояние заряда аккумулятора аномально упало по причинам выхода из строя генератора и т.п., чтобы за счет этого предоставлять возможность транспортному средству двигаться в экстренной ситуации.
СПИСОК БИБЛИОГРАФИЧЕСКИХ ССЫЛОК
ПАТЕНТНЫЕ ДОКУМЕНТЫ
[0005] Патентный документ 1. Международная публикация номер WO-2011-129196
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
ТЕХНИЧЕСКАЯ ЗАДАЧА
[0006] Патентный документ 1 раскрывает проект, применимый для управления переключением режима на параллельный режим в нештатной ситуации, такой как выход из строя генератора. Тем не менее, надлежащее переключение режима движения требуется не только в такой нештатной ситуации, но также и в нормальной ситуации. В частности, гибридное электрическое транспортное средство, выполненное с возможностью движения в параллельном режиме, должно улучшать расход топлива посредством надлежащего переключения режима движения.
Изобретение задумано с возможностью разрешать проблему и нацелено на предоставление контроллера переключения режима движения гибридного электрического транспортного средства, которое может двигаться в параллельном режиме, и на улучшение расхода топлива посредством надлежащего переключения режима движения.
РЕШЕНИЕ ЗАДАЧИ
[0007] Для решения задачи, предусмотрен контроллер переключения режима движения гибридного электрического транспортного средства, которое имеет двигатель для приведения в движение ведущих колес транспортного средства и приведения в действие генератора, приводной аккумулятор, который может быть заряжен при подаче электрической энергии из генератора, приводной мотор, который приводит в движение ведущие колеса посредством электрической энергии, подаваемой из приводного аккумулятора, или электрической энергии, подаваемой из генератора, и муфту, которая прикладывает и прекращает приложение движущей силы, передаваемой из двигателя на ведущие колеса, и которое движется при переключении между:
- первым режимом движения, в котором муфта расцепляется, и двигатель деактивируется, и в котором ведущие колеса приводятся в движение посредством активации приводных моторов посредством использования электрической энергии, подаваемой из приводного аккумулятора;
- вторым режимом движения, в котором муфта расцепляется, в котором генератор приводится в действие посредством двигателя, чтобы вырабатывать электрическую энергию, и в котором приводной мотор активируется посредством электрической энергии, чтобы приводить в движение ведущие колеса; и
- третьим режимом движения, в котором муфта сцепляется, и в котором ведущие колеса приводятся в движение посредством двигателя,
причем контроллер переключения режима движения содержит:
- модуль определения скорости для определения скорости движения транспортного средства;
- модуль определения состояния заряда для определения состояния заряда приводного аккумулятора; и
- модуль управления переключением для избирательного переключения между первым режимом движения, вторым режимом движения и третьим режимом движения на основе скорости движения транспортного средства и состояния заряда приводного аккумулятора, при этом:
модуль управления переключением выполняет:
- переключение между вторым режимом движения и третьим режимом движения на первой скорости, когда состояние заряда меньше первого состояния заряда, и
- переключение между первым режимом движения и третьим режимом движения на предварительно определенной скорости, которая выше первой скорости, когда состояние заряда составляет первое состояние заряда или больше.
[0008] Контроллер переключения режима движения гибридного электрического транспортного средства дополнительно может содержать модуль определения требуемой выходной мощности для определения требуемой выходной мощности, которая требуется от транспортного средства, при этом:
модуль управления переключением выполняет, когда состояние заряда выше первого состояния заряда:
- переключение между вторым режимом движения и третьим режимом движения на второй скорости, которая выше первой скорости, в случае, когда требуемая выходная мощность составляет предварительно определенную требуемую выходную мощность или больше, и
- переключение между первым режимом движения и третьим режимом движения на третьей скорости, которая выше второй скорости, в случае, когда требуемая выходная мощность меньше предварительно определенной требуемой выходной мощности.
[0009] Контроллер переключения режима движения гибридного электрического транспортного средства может иметь такую конфигурацию, в которой модуль управления переключением выполняет переключение между вторым режимом движения и третьим режимом движения на третьей скорости, когда состояние заряда меньше второго состояния заряда, которое ниже первого состояния заряда.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0013] Фиг. 1 является принципиальной схемой расположения гибридного электрического транспортного средства со штепсельным соединением по варианту осуществления изобретения.
Фиг. 2 является блок-схемой последовательности операций способа, показывающей процедуры, согласно которым гибридный модуль управления по варианту осуществления задает скорость транспортного средства для переключения режима.
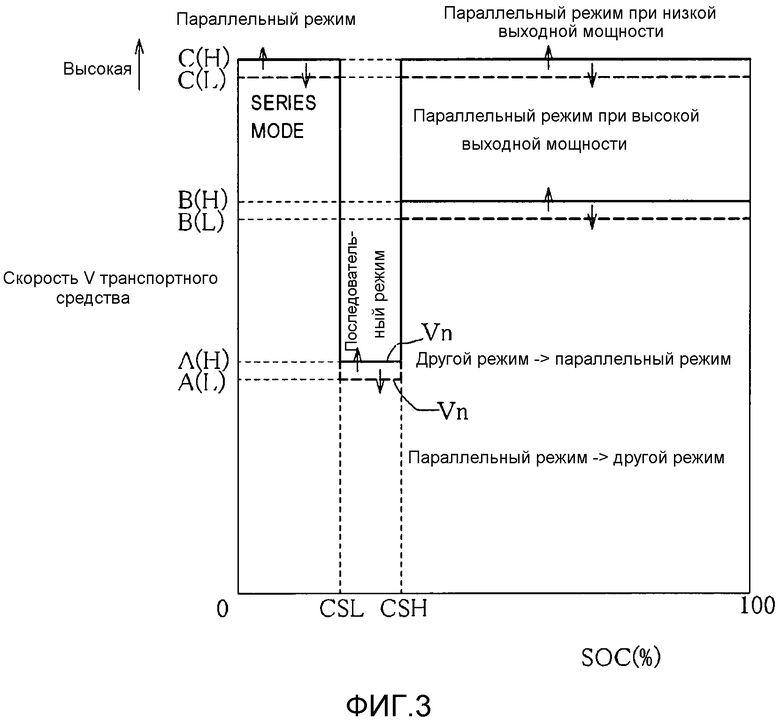
Фиг. 3 является картой, показывающей состояние задания переключения параллельного режима в варианте осуществления.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[0014] Ниже описывается вариант осуществления изобретения со ссылкой на чертежи.
Фиг. 1 является принципиальной схемой расположения гибридного электрического транспортного средства со штепсельным соединением (в дальнейшем называемого "транспортным средством 1") по варианту осуществления изобретения.
Транспортное средство 1 по варианту осуществления является транспортным средством с приводом на четыре колеса, которое может двигаться посредством приведения в движение передних колес 3 посредством выходной мощности из двигателя 2 и которое оснащается передним электромотором 4 (приводным мотором) для приведения в движение передних колес 3 и задним электромотором 6 (приводным мотором) для приведения в движение задних колес 5.
[0015] Двигатель 2 может приводить в действие ведущий вал 8 передних колес 3 посредством редуктора 7 и также вырабатывать электричество посредством активации генератора 9 посредством редуктора 7.
За счет подачи электрической энергии высокого напряжения из приводного аккумулятора 11, смонтированного в транспортном средстве 1, и генератора 9 посредством переднего инвертора 10, передний мотор 4 активируется, чтобы за счет этого приводить в действие ведущий вал 8 передних колес 3 посредством редуктора 7. Редуктор 7 имеет встроенную муфту 7a, которая может переключаться между состоянием соединения и состоянием разъединения для передачи энергии между выходным валом двигателя 2 и ведущим валом 8 передних колес 3.
[0016] За счет подачи электрической энергии высокого напряжения из приводного аккумулятора 11 и генератора 9 посредством заднего инвертора 12 задний мотор 6 активируется, чтобы за счет этого приводить в действие ведущий вал 14 задних колес 5 посредством редуктора 13.
Электрическая энергия, вырабатываемая посредством генератора 9, может использоваться для подачи электрической энергии в передний мотор 4 и задний мотор 6, а также для перезаряда приводного аккумулятора 11 посредством переднего инвертора 10.
[0017] Приводной аккумулятор 11 имеет непроиллюстрированный аккумуляторный модуль, который состоит из аккумуляторной батареи, такой как литий-ионный аккумулятор, и в котором множество аккумуляторных элементов связываются посредством связки. Помимо этого, приводной аккумулятор 11 оснащается модулем 11a мониторинга аккумулятора (включающим в себя модуль определения состояния заряда) для мониторинга температуры и состояния заряда (в дальнейшем сокращенно называемого "SOC") аккумуляторного модуля. Модуль мониторинга аккумулятора также имеет функцию вычисления электрической энергии W, которую может принимать приводной аккумулятор 11, из температуры, состояния заряда, состояния использования. Состояние использования также может быть интегрированным значением входных и выходных электрических токов. Приемлемая электрическая энергия W является электрической энергией, которая может вводиться в приводной аккумулятор 11 для цели перезаряда и снижается при низкой температуре. Дополнительно, когда SOC почти достигает полностью заряженного состояния, приемлемая электрическая энергия W снижается. Помимо этого, приемлемая электрическая энергия W также снижается еще и по причинам ухудшения характеристик, которое возникает с течением времени, поскольку аккумулятор использован.
[0018] Передний инвертор 10 имеет модуль 10a управления переднего мотора и модуль 10b управления генератора. Модуль 10a управления переднего мотора управляет выходной мощностью переднего мотора 4 в соответствии с управляющим сигналом из гибридного модуля 20 управления. Гибридный модуль 20 управления включает в себя модуль управления переключением и модуль определения требуемой водителем выходной мощности . Модуль 10b управления генератора имеет функцию управления величиной электричества, вырабатываемого посредством генератора 9, в соответствии с управляющим сигналом из гибридного модуля 20 управления.
[0019] Задний инвертор 12 имеет модуль 12a управления заднего мотора. Модуль 12a управления заднего мотора имеет функцию управления выходной мощностью заднего мотора 6 в соответствии с управляющим сигналом из гибридного модуля 20 управления.
Транспортное средство 1 также оснащается зарядным устройством 21 аккумулятора, которое заряжает приводной аккумулятор 11 с помощью внешнего источника питания.
[0020] Гибридный модуль 20 управления является контроллером для полного управления транспортным средством 1 и включает в себя устройство ввода-вывода, запоминающее устройство, центральный арифметический процессор (CPU), таймер и т.п. Запоминающее устройство также может быть ROM, RAM, энергонезависимым RAM и т.п.
Модуль 11a мониторинга аккумулятора приводного аккумулятора 11, модуль 10a управления переднего мотора и модуль 10b управления генератора переднего инвертора 10, модуль 12a управления заднего мотора заднего инвертора 12, модуль 22 управления двигателем для управления работой двигателя 2 и датчик позиции акселератора 40 для определения рабочей величины педали акселератора соединяются с входной стороной гибридного модуля 20 управления. Фрагменты информации определения и активации, выводимой из этих модулей, вводятся в гибридный модуль 20 управления. Информация, определенная посредством модуля определения скорости, который определяет скорость транспортного средства, также передается в гибридный модуль 20 управления.
[0021] Между тем, модуль 10a управления переднего мотора и модуль 10b управления генератора переднего инвертора 10, модуль 12a управления заднего мотора заднего инвертора 12, редуктор 7, имеющий муфту 7a, и модуль 22 управления двигателем соединяются с выходной стороной гибридного модуля 20 управления.
Гибридный модуль 20 управления вычисляет требуемую выходную мощность P, которая необходима для того, чтобы активировать транспортное средство 1 и вызвать его движение, из различных фрагментов информации определения и активации и передает управляющие сигналы в модуль 22 управления двигателем, модуль 10a управления переднего мотора, модуль 10b управления генератора, модуль 12a управления заднего мотора и редуктор 7, за счет этого переключая режим движения и управляя выходной мощностью из двигателя 4, выходной мощностью из переднего мотора 9 и выходной мощностью из заднего мотора 11, и величиной электричества, вырабатываемого посредством генератора 9. Режим движения включает в себя EV-режим (режим электрического транспортного средства), последовательный режим и параллельный режим.
[0022] В EV-режиме (первом режиме движения) муфта 7a редуктора 7 расцепляется, и двигатель 2 деактивируется. Передний мотор 4 и задний мотор 6 активируются посредством единицы электрической энергии, подаваемой из приводного аккумулятора 11, чтобы за счет этого предписывать транспортному средству двигаться.
В последовательном режиме (втором режиме движения) муфта 7a редуктора 7 расцепляется, и двигатель 2 активирует генератор 9. Передний мотор 4 и задний мотор 6 активируются посредством использования электрической энергии, вырабатываемой посредством генератора 9, и электрической энергии, подаваемой из приводного аккумулятора 11, за счет этого вызывая движение транспортного средства. Помимо этого, в последовательном режиме частота вращения двигателя 2 поддерживается при высокой эффективности, а именно в диапазоне оптимального расхода топлива, и электрическая энергия, вырабатываемая посредством чрезмерной выходной мощности, подается в приводной аккумулятор 11, тем самым перезаряжая приводной аккумулятор 11.
[0023] В параллельном режиме (третьем режиме движения) муфта 7a редуктора 7 сцепляется, чтобы за счет этого механически передавать приводную энергию из двигателя 2 посредством редуктора 7 и приводить в движение передние колеса 3. Помимо этого, передний мотор 4 и задний мотор 6 активируются посредством электрической энергии, которая вырабатывается в результате активации генератора 9 посредством двигателя 2, и электрической энергии, подаваемой из приводного аккумулятора 11, за счет этого вызывая движение транспортного средства.
Гибридный модуль 20 управления выполняет переключение режима движения на основе SOC приводного аккумулятора 11, требуемой выходной мощности P, скорости V движения и приемлемой электрической энергии W.
[0024] Переключение между EV-режимом и последовательным режимом осуществляется на основе требуемой выходной мощности P, вычисленной из рабочей величины педали акселератора и SOC приводного аккумулятора 11. Например, когда требуемая выходная мощность P является высокой, режим движения переключается на последовательный режим. Когда требуемая выходная мощность P является низкой и когда SOC является высоким, режим движения переключается на EV-режим. Когда как требуемая выходная мощность P, так и SOC являются низкими, режим движения переключается на последовательный режим.
Переключение между параллельным режимом и другим режимом (последовательным режимом и EV-режимом) осуществляется на основе скорости Vn транспортного средства, SOC приводного аккумулятора 11 и приемлемой энергии W. Конкретно, когда фактическая скорость V транспортного средства равна скорости Vn транспортного средства для переключения режима, которая задается на основе SOC приводного аккумулятора 11 и приемлемой электрической энергии W или больше, выполняется задание параллельного режима. В отличие от этого, когда фактическая скорость V транспортного средства меньше скорости Vn транспортного средства для переключения режима, задается другой режим (последовательный режим и EV-режим).
[0025] Фиг. 2 является блок-схемой последовательности операций способа, показывающей процедуры, согласно которым гибридный модуль 20 управления задает скорость Vn транспортного средства для переключения режима.
Эта процедура итеративно выполняется с предварительно определенными периодами, когда активируется энергия транспортного средства 1.
Во-первых, на этапе S10 электрическая энергия W, которую может принимать приводной аккумулятор 11, вводится в гибридный модуль 20 управления из модуля 11a мониторинга аккумулятора и выполняется определение в отношении того, меньше или нет приемлемая электрическая энергия W предварительно определенного значения W1. Единственное требование заключается в том, чтобы задавать предварительно определенное значение W1, например, равным значению, которое обеспечивает повторную зарядку приводного аккумулятора 11 с небольшой потерей в параллельном режиме. Когда приемлемая электрическая энергия W не меньше предварительно определенного значения W1, а именно, когда приемлемая электрическая энергия W составляет предварительно определенное значение W1 или больше, процедура переходит к этапу S20.
[0026] На этапе S20 SOC приводного аккумулятора 11 вводится в гибридный модуль 20 управления из модуля 11a мониторинга аккумулятора и выполняется определение в отношении того, меньше или нет SOC первого порогового значения CSL (второе SOC). Первое пороговое значение CSL задается равным, например, нижнему предельному значению SOC CSL из допустимой области SOC приводного аккумулятора 11. Когда SOC не меньше первого порогового значения CSL, а именно, когда SOC составляет первое пороговое значение CSL или больше, процедура переходит к этапу S30.
[0027] На этапе S30 выполняется определение в отношении того, выше или нет SOC, введенное на этапе S20, второго порогового значения CSH (первого состояния заряда). Второе пороговое значение CSH является значением, которое немного выше первого порогового значения CSL. Например, второе пороговое значение CSH задается равным целевому значению SOC CSH, используемому в случае поддержания SOC в ходе гибридного движения, выполняемого в параллельном режиме или последовательном режиме. В этом отношении диапазон между первым пороговым значением CSL и вторым пороговым значением CSH соответствует целевому диапазону эксплуатации для SOC приводного аккумулятора 11 во время гибридного движения. Когда SOC не выше первого порогового значения CSL, а именно, когда SOC составляет первое пороговое значение CSL или меньше, процедура переходит к этапу S40.
[0028] На этапе S40 выполняется определение в отношении того, задается или нет режим движения в данный момент как параллельный режим. Когда текущий режим движения не задается как параллельный режим, процедура переходит к этапу S50. Когда режим движения в данный момент задается как параллельный режим, процедура переходит к этапу S60.
На этапе S50 скорость Vn транспортного средства для переключения режима для принудительного переключения на параллельный режим задается равной предварительно установленной скорости A(H) транспортного средства (первой скорости). Тем не менее, в этом отношении предварительно установленная скорость A(H) транспортного средства может задаваться равной, например, 65 км/ч. Процедура теперь завершается.
[0029] На этапе S60 скорость Vn транспортного средства для переключения режима, переключающая параллельный режим на другой режим, задается равной предварительно установленной скорости A(H) транспортного средства. Важнейшее требование заключается в том, что предварительно установленная скорость A(L) транспортного средства задается равной значению, которое немного ниже предварительно установленной скорости A(H) транспортного средства, например, 60 км/ч. Процедура завершается.
Когда определяется, что SOC выше первого порогового значения CSL на этапе S30, процедура переходит к этапу S70.
[0030] На этапе S70 выполняется определение в отношении того, задается или нет режим движения в данный момент как параллельный режим. Когда текущий режим движения не задается как параллельный режим, процедура переходит к этапу S80. Когда режим движения в данный момент задается как параллельный режим, процедура переходит к этапу S90.
На этапе S80 скорость Vn транспортного средства для переключения режима для принудительного переключения на параллельный режим задается равной предварительно установленной скорости B(H) транспортного средства (второй скорости). В этом отношении предварительно установленная скорость B(H) транспортного средства является значением, которое выше предварительно установленной скорости A(H) транспортного средства. Важнейшее требование заключается в том, чтобы задавать предварительно установленную скорость B(H) транспортного средства, например, равной 110 км/ч. Процедура завершается.
[0031] На этапе S90 скорость Vn транспортного средства для переключения режима для переключения параллельного режима на другой режим задается равной предварительно установленной скорости B(L) транспортного средства. В этом отношении единственное требование заключается в том, чтобы задавать предварительно установленную скорость B(L) транспортного средства равной значению, которое немного ниже предварительно установленной скорости B(H) транспортного средства, например, 105 км/ч. Процедура завершается.
Когда определяется, что приемлемая электрическая энергия W меньше предварительно определенного значения W1 на этапе S10, или когда определяется, что SOC меньше первого порогового значения CSL на этапе S20, процедура переходит к этапу S100.
[0032] На этапе S100 выполняется определение в отношении того, задается или нет режим движения в данный момент как параллельный режим. Когда текущий режим движения не задается как параллельный режим, процедура переходит к этапу S110. Когда режим движения в данный момент задается как параллельный режим, процедура переходит к этапу S120.
На этапе S110 скорость Vn транспортного средства для переключения режима для принудительного переключения на параллельный режим задается равной предварительно установленной скорости C(H) транспортного средства (третьей скорости). В этом отношении предварительно установленная скорость C(H) транспортного средства может быть значением, которое выше предварительно установленной скорости B(H) транспортного средства. Важнейшее требование заключается в том, чтобы задавать предварительно установленную скорость C(H) транспортного средства равной значению, которое фактически не достигается, например, 150 км/ч. Процедура завершается.
[0033] На этапе S120 скорость Vn транспортного средства для переключения режима для принудительного переключения с параллельного режима на другой режим задается равной предварительно установленной скорости C(L) транспортного средства. Единственное требование заключается в том, чтобы задавать предварительно установленную скорость C(L) транспортного средства равной значению, которое немного ниже предварительно установленной скорости C(H) транспортного средства, например, 145 км/ч. Процедура завершается.
Фиг. 3 является картой, показывающей состояние задания переключения параллельного режима. Жирная сплошная линия, показанная на фиг. 3, обозначает скорость Vn транспортного средства для переключения режима для переключения режима движения, отличного от параллельного режима, на параллельный режим, и показанная жирная пунктирная линия обозначает скорость Vn транспортного средства для переключения режима для переключения параллельного режима на другой режим движения.
[0034] Скорость Vn транспортного средства для переключения режима для принудительного переключения на параллельный режим задается так, как проиллюстрировано посредством блок-схемы последовательности операций способа, показанной на фиг. 2, посредством чего переключение между параллельным режимом и другим режимом движения мгновенно выполняется на основе скорости V транспортного средства и SOC.
Когда текущий режим движения не является параллельным режимом, а именно, когда SOC попадает в диапазон от первого порогового значения CSL до второго порогового значения CSH, наименьшая предварительно установленная скорость транспортного средства из предварительно установленных скоростей A(H), B(H) и C(H) транспортного средства выбирается для скорости Vn транспортного средства для переключения режима для переключения последовательного режима (или EV-режима) на параллельный режим.
[0035] Когда SOC попадает в диапазон, который ниже целевого значения SOC CSH в допустимой области, скорость Vn транспортного средства для переключения режима задается равной предварительно установленной скорости A(H) транспортного средства, которая является сравнительно низким значением. Соответственно низкая скорость транспортного средства переключается на параллельный режим. В параллельном режиме часть движущей силы двигателя 2 механически передается на ведущий вал 8. Следовательно, параллельный режим является предпочтительным в отношении эффективности трансмиссии по сравнению с последовательным режимом, в котором вся движущая сила двигателя 2 передается на ведущие валы 8 и 14 посредством генератора 9 и приводных моторов (переднего мотора 4 и заднего мотора 6). Дополнительно приводные моторы (передний мотор 4 и задний мотор 6) потребляют меньше электрической энергии в параллельном режиме, чем в последовательном режиме. Следовательно, SOC приводного аккумулятора 11 с меньшей вероятностью может падать, и может предотвращаться его падение ниже допустимой области (т.е. первого порогового значения CSL).
[0036] Когда SOC выше второго порогового значения CSH, скорость Vn транспортного средства для переключения режима задается равной предварительно установленной скорости B(H) транспортного средства, которая выше предварительно установленной скорости A(H) транспортного средства.
Когда SOC попадает в диапазон, который выше целевого значения SOC CSH, скорость Vn транспортного средства для переключения режима за счет этого задается равной сравнительно высокому значению; следовательно, переключение на параллельный режим не осуществляется до тех пор, пока не будет достигнута высокая скорость транспортного средства. Как следствие, растет вероятность задания режима движения как другого режима, в частности EV-режима, что, в свою очередь, дает возможность улучшения расхода топлива.
[0037] Помимо этого, когда SOC попадает в диапазон, который выше целевого значения SOC CSH, и когда требуемая выходная мощность P меньше предварительно определенной требуемой выходной мощности, которая может выводиться в EV-режиме, скорость Vn транспортного средства для переключения режима задается равной наибольшей предварительно установленной скорости C(H) транспортного средства. Вероятность задания режима движения как EV-режима за счет этого дополнительно растет, что дает возможность дополнительного улучшения расхода топлива. Кроме того, когда требуемая выходная мощность P превышает предварительно определенную требуемую выходную мощность, а именно, когда выходная мощность становится недостаточной в EV-режиме, скорость Vn транспортного средства для переключения режима задается равной предварительно установленной скорости B(H) транспортного средства, как упомянуто выше. Когда скорость V транспортного средства является скоростью Vn транспортного средства для переключения режима (предварительно установленной скоростью B(H) транспортного средства) или больше, выбирается параллельный режим. Напротив, когда скорость V транспортного средства меньше скорости Vn транспортного средства для переключения режима (предварительно установленной скорости B(H) транспортного средства), выбирается последовательный режим. В течение периода высокой выходной мощности, в котором выходная мощность становится недостаточной в EV-режиме, требуется выбор параллельного режима или последовательного режима. Между тем, когда переключение на параллельный режим выполняется на низкой скорости транспортного средства, частота вращения двигателя 2 падает. Соответственно двигатель 2 активируется в диапазоне низкой эффективности так, что увеличивается уровень расхода топлива, что может ухудшать расход топлива. В свете этого последовательный режим выбирается в варианте осуществления на низкой скорости транспортного средства, которая ниже предварительно установленной скорости B(H) транспортного средства, посредством чего может поддерживаться частота вращения двигателя 2 при высокой эффективности, а именно в диапазоне низкого уровня расхода топлива, и может быть улучшен расход топлива. Между тем, когда транспортное средство имеет высокую скорость, которая равна предварительно установленной скорости B(H) транспортного средства или больше, частота вращения двигателя 2 может поддерживаться в диапазоне высокой эффективности, даже когда выбирается параллельный режим. Следовательно, расход топлива может быть улучшен посредством задания режима движения как параллельного режима, который демонстрирует предпочтительную эффективность передачи, обеспечивает улучшение расхода топлива.
[0038] Кроме того, когда SOC меньше второго порогового значения CSL, выбирается предварительно установленная скорость C(H) транспортного средства, которая является самой большой из предварительно установленных скоростей A(H), B(H) и C(H) транспортного средства.
Как результат, когда SOC меньше второго порогового значения CSL, режим движения не задается как параллельный режим до тех пор, пока скорость V транспортного средства не увеличится до предварительно установленной скорости C(H) транспортного средства, заданной для скорости Vn транспортного средства для переключения режима. Как упомянуто выше, поскольку предварительно установленная скорость C(H) транспортного средства составляет, например, 150 км/ч, переключение на параллельный режим регулируется существенно. SOC опускается ниже допустимой области (второго порогового значения CSL) в это время, и, следовательно, режим движения задается как последовательный режим. Поскольку муфта 7a сцепляется в параллельном режиме, пределы накладываются как на частоту вращения двигателя 2, так и на величину электричества, вырабатываемого посредством генератора 9. В отличие от этого, поскольку муфта 7a не сцепляется в последовательном режиме, частота вращения двигателя 2 может быть свободно задана. По этой причине величина вырабатываемого электричества может быть увеличена посредством увеличения частоты вращения двигателя 2, и, следовательно, величина электричества для перезаряда приводного аккумулятора 11 может быстро увеличиваться.
[0039] Когда текущий режим движения является параллельным режимом, а именно, когда скорость Vn транспортного средства для переключения режима, на которой параллельный режим переключается на другой режим движения (последовательный режим или EV-режим), изменяется на основе скорости V транспортного средства и SOC, аналогично скорости Vn транспортного средства, на которой другой режим движения (последовательный режим и EV-режим) переключается на параллельный режим. Тем не менее обе скорости транспортного средства задаются ниже приблизительно на 5 км/ч соответственно. Следовательно, обеспечивается преимущество, аналогичное преимуществу, обеспечиваемому, когда другой режим движения (последовательный режим или EV-режим) переключается на параллельный режим, и может предотвращаться возникновение рывков при работе, которые в ином случае возникают во время переключения режима движения.
[0040] Кроме того, как указано посредством этапа S10, показанного на фиг. 2, скорость Vn транспортного средства для переключения режима задается равной самой большой скорости C(H) транспортного средства при аномальном условии аналогично ситуации, в которой приемлемая электрическая энергия W приводного аккумулятора 11 остается низкой. Параллельный режим в силу этого в значительной степени регулируется. Причина этого состоит в том, что, например, когда приводной аккумулятор 11 работает в режиме низкой температуры или имеет ухудшенные характеристики, электрическая энергия, требуемая для того, чтобы приводить в действие муфту 7a, чтобы принудительно переключаться на параллельный режим, может становиться недостаточной. Помимо этого, когда приводной аккумулятор 11 остается полностью заряженным, приводной аккумулятор 11 не может более заряжаться. Соответственно запрещение нежелательной выработки энергии и защита приводного аккумулятора 11 может достигаться посредством принудительного переключения на EV-режим, чтобы за счет этого деактивировать двигатель 2, или переключения на последовательный режим, чтобы за счет этого снижать частоту вращения двигателя 2 и величину электричества, вырабатываемого посредством генератора 9. Кроме того, когда осуществляется переключение на параллельный режим, регулирование частоты вращения двигателя 2, например, обычно осуществляется таким образом, чтобы синхронизировать частоту вращения, достигаемую перед муфтой 7a, с частотой вращения, достигаемой после муфты 7a, чтобы предотвращать возникновение изменения частоты вращения в случае сцепления муфты 7a. Тем не менее в полностью заряженном состоянии, даже когда частота вращения двигателя 2 увеличивается посредством регулирования, и когда величина электричества, вырабатываемого посредством генератора 9, в результате увеличивается, нет возможностей для приема такой вырабатываемой электрической энергии. Тем не менее такая неэкономичная выработка электрической энергии может предотвращаться посредством ограничения переключения на параллельный режим.
[0041] Как описано выше, в варианте осуществления переключение между параллельным режимом и другим режимом выполняется на основе скорости V транспортного средства и SOC приводного аккумулятора 11. В частности, скорость Vn транспортного средства для переключения режима для принудительного переключения на параллельный режим мгновенно задается на основе SOC, посредством чего улучшается расход топлива. Кроме того, SOC аккумулятора может поддерживаться в целевом диапазоне эксплуатации (в диапазоне от первого порогового значения CSL до второго порогового значения CSH). Дополнительно даже в аномальных условиях, в которых приводной аккумулятор 11 не может полностью принимать электрическую энергию, исключение неэкономичной выработки энергии и защита приводного аккумулятора 11 может реализовываться посредством ограничения переключения на параллельный режим.
[0010] Как описано выше, контроллер переключения режима движения гибридного электрического транспортного средства по изобретению выполняет переключение между вторым режимом движения и третьим режимом движения на первой скорости, когда SOC аккумулятора меньше предварительно определенного SOC. Когда SOC составляет предварительно определенный SOC или больше, переключение между первым режимом движения и третьим режимом движения выполняется на скорости, которая выше первой скорости. Когда скорость движения является высокой, выбирается третий режим движения. В силу этого, когда SOC аккумулятора меньше предварительно определенного SOC, третий режим движения выбирается на низкой скорости, так что может быть увеличена вероятность выбора третьего режима движения. Следовательно, расход топлива может быть улучшен посредством эффективной передачи движущей силы, и электрическая энергия, потребляемая посредством приводных моторов, уменьшается, посредством чего может предотвращаться снижение SOC приводного аккумулятора. Помимо этого, когда SOC аккумулятора составляет предварительно определенный SOC или выше, переключение осуществляется на более высокой скорости движения по сравнению со случаем, в котором SOC аккумулятора меньше предварительно определенного SOC. Соответственно вероятность выбора третьего режима движения исключается, а вероятность выбора первого режима движения увеличивается, посредством чего может уменьшаться расход топлива.
[0011] В случае, если SOC аккумулятора выше предварительно определенного SOC, переключение между вторым режимом движения и третьим режимом движения осуществляется на второй скорости, которая выше первой скорости, когда требуемая выходная мощность составляет предварительно определенную требуемую выходную мощность или больше. Соответственно третий режим движения выбирается для движения на высокой скорости, в силу этого запрещая переключение на третий режим движения на низкой скорости и поддерживая двигатель в эффективном режиме высокой частоты вращения, посредством чего ведущие колеса могут эффективно приводиться в движение посредством двигателя. Дополнительно, когда требуемая выходная мощность меньше предварительно определенной требуемой выходной мощности, переключение между первым режимом движения и третьим режимом движения осуществляется на третьей скорости, которая выше второй скорости. Следовательно, первый режим движения выбирается для низкой скорости движения, посредством чего увеличивается вероятность выбора первого режима движения, и посредством чего может быть улучшен расход топлива.
[0012] Когда SOC аккумулятора меньше второго SOC, переключение между вторым режимом движения и третьим режимом движения осуществляется на третьей скорости, которая выше первой скорости и второй скорости. Соответственно второй режим движения выбирается для низкой скорости, посредством чего увеличивается вероятность выбора второго режима движения, чтобы за счет этого задавать частоту вращения двигателя, равной высокой частоте. Величина электричества, вырабатываемого посредством генератора, за счет этого увеличивается, посредством чего может быстро восстанавливаться SOC аккумулятора.
[0042] В этой связи изобретение не ограничено вышеприведенным вариантом осуществления. Например, количественные величины предварительно установленных значений [A(H), A(L), B(H), B(L), C(H) и C(L)] соответствующих скоростей Vn транспортного средства для переключения режима и количественные величины пороговых значений для SOC (первого порогового значения CSL и второго порогового значения CSH) могут изменяться соответствующим образом до тех пор, пока количественные величины демонстрируют идентичный порядок величины.
Кроме того, хотя в варианте осуществления изобретение применяется к гибридному электрическому транспортному средству со штепсельным соединением с приводом на четыре колеса, изобретение может широко применяться к гибридным электрическим транспортным средствам, которые могут выполнять переключение, по меньшей мере, между EV-режимом, последовательным режимом и параллельным режимом.
СПИСОК УСЛОВНЫХ ОБОЗНАЧЕНИЙ
[0043] 1 - транспортное средство
2 - двигатель
4 - передний мотор (приводной мотор)
6 - задний мотор (приводной мотор)
7a - муфта
9 - генератор
11 - приводной аккумулятор
20 - гибридный модуль управления (модуль управления переключением, модуль определения водителем требуемой выходной мощности)

Изобретение относится к управлению гибридным транспортным средством. Контроллер переключения режима движения гибридного электрического транспортного средства содержит модуль определения скорости движения транспортного средства; модуль определения состояния заряда приводного аккумулятора и модуль управления переключением между первым, вторым и третьим режимом движения на основе скорости транспортного средства и состояния заряда приводного аккумулятора. Модуль управления переключением выполняет переключение между вторым и третьим режимом на первой скорости, когда состояние заряда меньше первого состояния заряда, и переключение между первым и третьим режимом на скорости, которая выше первой скорости, когда состояние заряда составляет первое состояние заряда или больше. Модуль управления переключением дополнительно содержит модуль определения требуемой выходной мощности от транспортного средства, который выполняет, когда состояние заряда выше первого состояния заряда, переключение между вторым режимом и третьим на второй скорости, и переключение между первым и третьим режимом на третьей скорости, которая выше второй скорости, в случае, когда требуемая выходная мощность меньше требуемой выходной мощности. Снижается расход топлива. 3 з.п. ф-лы, 3 ил.
1. Контроллер (20) переключения режима движения гибридного электрического транспортного средства (1), которое имеет двигатель (2) для приведения в движение ведущих колес (3) транспортного средства (1) и приведения в действие генератора (9), приводной аккумулятор (11), который может быть заряжен при подаче электрической энергии из генератора (9), приводной мотор (6), который приводит в движение ведущие колеса (3) посредством электрической энергии, подаваемой из приводного аккумулятора (11), или электрической энергии, подаваемой из генератора (9), и муфту (7а), которая соединяет и отсоединяет движущую силу, передаваемую из двигателя (2) к ведущим колесам (3), и которое движется при переключении между:
- первым режимом движения, в котором муфта (7а) расцепляется, и двигатель (2) деактивируется, и в котором ведущие колеса (3) приводятся в движение посредством активации приводного мотора (6) посредством использования электрической энергии, подаваемой из приводного аккумулятора (11);
- вторым режимом движения, в котором муфта (7а) расцепляется, в котором генератор (9) приводится в действие посредством двигателя (2), чтобы вырабатывать электрическую энергию, и в котором приводной мотор (6) активируется посредством электрической энергии, чтобы приводить в движение ведущие колеса (3); и
- третьим режимом движения, в котором муфта (7а) сцепляется, и в котором ведущие колеса (3) приводятся в движение посредством двигателя (2),
причем контроллер (20) переключения режима движения содержит:
- модуль определения скорости для определения скорости движения транспортного средства;
- модуль (11а) определения состояния заряда для определения состояния заряда приводного аккумулятора (11); и
- модуль (20) управления переключением для избирательного переключения между первым режимом движения, вторым режимом движения и третьим режимом движения на основе скорости движения транспортного средства (1) и состояния заряда приводного аккумулятора (11), при этом:
модуль (20) управления переключением выполняет:
- переключение между вторым режимом движения и третьим режимом движения на первой скорости (А(Н), A(L)), когда состояние заряда меньше первого состояния заряда (CSH), и
- переключение между первым режимом движения и третьим режимом движения на предварительно определенной скорости (С(Н), C(L)), которая выше первой скорости (А(Н), A(L)), когда состояние заряда составляет первое состояние заряда (CSH) или больше,
отличающийся тем, что
модуль (20) управления переключением дополнительно содержит модуль (20) определения требуемой выходной мощности для определения требуемой выходной мощности, которая требуется от транспортного средства (1), при этом:
модуль (20) управления переключением выполняет, когда состояние заряда выше первого состояния заряда (CSH):
- переключение между вторым режимом движения и третьим режимом движения на второй скорости (В(Н), B(L)), которая выше первой скорости (А(Н), A(L)), в случае, когда требуемая выходная мощность составляет предварительно определенную требуемую выходную мощность или больше, и
- переключение между первым режимом движения и третьим режимом движения на третьей скорости (С(Н), C(L)), которая выше второй скорости (В(Н), B(L)), в случае, когда требуемая выходная мощность меньше предварительно определенной требуемой выходной мощности.
2. Контроллер (20) переключения режима движения гибридного электрического транспортного средства (1) по п. 1, в котором:
модуль (20) управления переключением выполняет переключение между вторым режимом движения и третьим режимом движения на третьей скорости (С(Н), C(L)), когда состояние заряда меньше второго состояния заряда (CSL), которое ниже первого состояния заряда (CSH).
3. Контроллер (20) переключения режима движения гибридного электрического транспортного средства (1) по п.п. 1 или 2, в котором
первое состояние заряда (CSH) задается равным целевому значению, используемому в случае поддержания состояния заряда приводного аккумулятора (11).
4. Контроллер (20) переключения режима движения гибридного электрического транспортного средства (1) по п. 3, в котором
модуль (20) управления переключением выбирает второй режим движения или третий режим движения, когда состояние заряда приводного аккумулятора находится в диапазоне между первым состоянием заряда и вторым состоянием заряда, для поддержания состояния заряда приводного аккумулятора в целевом диапазоне эксплуатации.
| JP 2011225034 A, 10.11.2011 | |||
| JP 2006077641 A, 23.03.2006 | |||
| JP H1198607 A, 09.04.1999. |

