УРОВЕНЬ ТЕХНИКИ
[0001] Сейсморазведка используется для определения подземных условий, таких как залежи углеводородов, источники пресной воды, зоны нагнетания газа и так далее. Сейсмические источники в сейсморазведке находятся в различных местах на земной поверхности или морском дне; сейсмические источники активируются для создания сейсмических волн, направленных на подземную структуру.
[0002] Сейсмические волны, созданные сейсмическим источником, распространяются в подземной структуре, а часть сейсмических волн отражается обратно на поверхность для приема сейсмическими датчиками (например, геофоны, измерители ускорения, и т.д.). Эти датчики создают сигналы, которые представляют обнаруженные сейсмические волны. Сигналы от этих сейсмических датчиков обрабатываются для сбора информации о составе и свойствах подземной структуры.
[0003] Наземное устройство системы сейсморазведки может включать применение ряда датчиков на земле. При съемке на море могут использоваться датчики на буксируемой или донной косе.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0004] В общем, по некоторым вариантам реализации изобретения были получены данные, по меньшей мере, одного исследовательского датчика поступательного движения. Получены данные, по меньшей мере, одного датчика вращательного движения. Определено представление скорости волнового поля на основе данных о поступательном и вращательном движении.
[0005] В общем, по некоторым вариантам изобретения, устройство системы включает, по меньшей мере, один носитель данных, пригодный для машинного считывания, который сохраняет инструкции, при выполнении которых система получает данные о поступательном движении, принятые, по меньшей мере, одним исследовательским датчиком поступательного движения, и данные о горизонтальном вращательном движении. Определение представления скорости волнового поля рассчитывается на основе данных о поступательном и горизонтальном вращательном движении.
[0006] В общем, по некоторым вариантам изобретения система включает носитель данных, который сохраняет данные о вращательном движении, полученные, по меньшей мере, одним датчиком вращения, и данные о поступательном движении, полученные, по меньшей мере, одним исследовательским датчиком поступательного движения в качестве реакции на активизацию источника данных. По меньшей мере, один процессор должен производить определение представления скорости волнового поля на основе данных о вращательном и поступательном движении.
[0007] В других вариантах изобретения, вращение обычно происходит вокруг горизонтальной оси.
[0008] В других вариантах изобретения данные о вращении обычно включают данные о вращении вокруг горизонтальной оси и данные о вращении вокруг второй горизонтальной оси.
[0009] В других вариантах изобретения определение представления скорости волнового поля включает кажущуюся медленность волнового поля.
[0010] В других вариантах изобретения кажущаяся медленность волнового поля включает кажущуюся горизонтальную медленность, по меньшей мере, в одном направлении.
[0011] В других вариантах изобретения осуществляется определение представления скорости волнового поля при различных частотах.
[0012] В других вариантах изобретения определение представления скорости волнового поля включает определение кажущейся медленности волнового поля.
[0013] В других вариантах изобретения определение представления скорости волнового поля включает отношение данных о вращательном движении к данным о поступательном движении.
[0014] В других вариантах изобретения указанное отношение включает отношение данных о горизонтальном вращательном движении к данным о вертикальном поступательном движении.
[0015] В других вариантах изобретения определение представления скорости волнового поля используется для выполнения задачи согласно сейсмическим данным, характеризующим подземную структуру.
[0016] В других вариантах изобретения получены множественный набор данных о поступательном и вращательном движении и осуществляется определение представления скорости волнового поля на основе набора различных данных о поступательном и вращательном движении.
[0017] В других вариантах изобретения набор различных данных о поступательном и вращательном движении включают различные примеры для одного, заранее определенного, интервала времени.
[0018] В других вариантах изобретения примеры данных о поступательном и вращательном движении получены во время второго заранее определенного интервала времени, скорость волнового поля определена на основе набора данных о поступательном и вращательном движении.
[0019] В других вариантах изобретения определение представления скорости волнового поля включает определение представления скорости волнового поля, зависящую от частоты.
[0020] В других вариантах изобретения данные о горизонтальном вращении обычно включают скорость вращения вокруг горизонтальной оси.
[0021] В других вариантах изобретения данные о горизонтальном вращении основаны на показаниях датчика вращения, при том, что датчик вращения расположен в пределах одного корпуса с датчиком поступательного движения.
[0022] В других вариантах изобретения данные о поступательном движении включают данные о вертикальном поступательном движении.
[0023] В других вариантах изобретения определение представления скорости волнового поля рассчитывается для одной или более частот или исследуемого волнового поля.
[0024] В других вариантах изобретения данные о вращательном движении постоянно изменяются, а определение представления скорости волнового поля основана на изменяющихся данных о вращательном движении.
[0025] Другие свойства станут понятны из следующего описания, чертежей и формулы изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0026] Некоторые варианты реализации изобретения описаны в соответствии со следующими фигурами:
на фиг. 1 изображена схематическая диаграмма примера устройства датчика в сборе, который, согласно некоторым вариантам выполнения, может быть использован для сейсмической разведки;
на фиг. 2 и 3 изображены схематические диаграммы устройства датчиков в сборе согласно некоторым вариантам выполнения;
на фиг. 4 и 5 изображены схемы способов реализации различных вариантов изобретения; и
на фиг. 6 и 7 проиллюстрированы интервалы времени с набором данных измерений, которые могут использоваться в некоторых вариантах реализации изобретения.
ДЕТАЛЬНОЕ ОПИСАНИЕ
[0027] Сейсмические датчики (например, геофоны, измерители ускорения и т.д.) используются в сейсморазведке (морской или наземной) для получения сейсмических данных, таких как смещение, скорость или ускорение. К сейсмическим датчикам относят геофоны, измерители ускорения, МЭМС (микроэлектромеханические системы) датчики или любые другие типы датчиков, которые измеряют поступательное движение поверхности (например, смещение, скорость или ускорение), по меньшей мере, в одном, например, вертикальном направлении. Сейсмический датчик может также измерять поступательное движение в другом направлении, например, в одном или в обоих горизонтальных направлениях. Сейсмический датчик на поверхности земли может записывать векторные компоненты упругого волнового поля ниже уровня поверхности (например, поверхности земли или морского дна).
[0028] Сейсмический датчик также называют «поступательным сейсмическим датчиком» или, в более общем случае, «сейсмическим датчиком поступательного движения». Поступательное движение (или векторная компонента волнового поля), измеренное сейсмическим датчиком, называется данными о поступательном движении. При использовании многокомпонентных датчиков векторные компоненты волнового поля могут быть измерены в различных направлениях, например, в трех ортогональных направлениях (вертикальном Z, горизонтальном наклоненном X, горизонтальном поперечном Y).
[0029] Определение кажущейся скорости исследуемого волнового поля может быть использовано в ряде случаев. «Кажущаяся скорость» волнового поля может относиться к скорости волнового поля, наблюдаемой в данном направлении (например, в горизонтальном направлении). Заметим, что кажущаяся скорость волнового поля зависит как от горизонтального направления распространения, так и от вертикального угла наклона (угол относительно вертикальной оси) волнового поля на датчике. В случае распространения линейной волны, если угол наклона (относительно вертикальной оси) обозначен а, а действительная скорость волнового поля - V, тогда кажущаяся горизонтальная линейная скорость (v) может быть записана в виде v=V/sin a, а поперечная кажущаяся скорость равна бесконечности. В общем, кажущаяся горизонтальная скорость (также известна, как обратное значение параметра луча или горизонтальная медленность) является свойством или признаком, который полностью характеризует траекторию луча (или фронт луча). Параметр луча - это параметр, используемый во многих расчетах.
[0030] Параметр луча может быть использован для моделирования всей траектории луча в подземной структуре (трассировка лучей), потому что параметр луча остается неизменным весь путь луча (не изменяется при передаче, отражении, преломлении и преобразовании).
[0031] В некоторых случаях кажущаяся скорость волнового поля может использоваться для приповерхностной характеристики, по меньшей мере, одного объекта подземной структуру вблизи поверхности земли или морского дна, например, в 50 метрах от поверхности земли или морского дна. В других случаях кажущаяся скорость волнового поля может использоваться для декомпозиции волнового поля на такие субкомпоненты, как P-волна и S-волна. P-волна - это продольная волна, а S-волна - это поперечная волна. P-волна движется в направлении распространения волнового поля, а S-волна - как правило, в перпендикулярном направлении к сейсмическому волновому полю.
[0032] В других случаях кажущаяся скорость волнового поля может использоваться для подавления шума. Шум, включая горизонтально распространяющийся шум, например поверхностный шум, вносит свое влияние в записанные сейсмические данные. Поверхностный шум относится к сейсмическим волнам, созданным сейсмическими источниками или другими источниками, такими как движущиеся машины, двигатели, насосы и природные явления. К этим природным явлениям относятся ветер и океанские волны, которые распространяются, как правило, горизонтально вдоль земной поверхности к сейсмическим приемникам. Эти горизонтальные сейсмические волны, например, волны Рэлея или Лява, являются нежелательными компонентами, которые ухудшают сейсмические данные. Другой тип поверхностного шума включает волны Шольте, которые распространяются горизонтально под морским дном. К другим типам горизонтального шума относятся продольные и поперечные изгибные волны. Звуковая волна, еще один тип шума, который распространяется на границе воздух-вода при съемке на море.
[0033] В других случаях кажущаяся скорость волнового поля может быть использована для накапливания, то есть объединения (напр. суммирования) записанных трасс вместе, образующих сейсмограмму. Накапливание может улучшить общее качество данных, а также уменьшить шум.
[0034] Несмотря на то, что ранее был указан ряд вариантов использования кажущейся скорости, стоит заметить, что могут существовать другие примеры использования скорости волнового поля.
[0035] Согласно некоторым вариантам реализации, определение представления скорости волнового поля может быть осуществлена на основе данных о поступательном движении, полученных, по меньшей мере, одним сейсмическим датчиком поступательного движения и на основе данных о вращательном движении, полученных, по меньшей мере, одним датчиком вращательного движения. «Определение представления скорости» волнового поля может быть кажущейся скоростью, кажущейся медленностью (обратной кажущейся скорости) или любым другим указанием скорости исследуемого волнового поля. В некоторых случаях (например, при горизонтальном распространении волновых полей) кажущаяся скорость соответствует действительной скорости в земле.
[0036] В некоторых случаях реализации данные о поступательном движении, полученные, по меньшей мере, одним сейсмическим датчиком поступательного движения, соответствуют активации, по меньшей мере, одного активного сейсмического источника. «Активным сейсмическим источником» называется сейсмический источник, регулируемый оператором. В других случаях, данные о поступательном движении, полученные, по меньшей мере, одним сейсмическим датчиком поступательного движения, могут быть частью пассивного исследования, что не предполагает активных сейсмических источников. В пассивном варианте используются датчики, которые выполняют одну или несколько функций из следующего списка: мониторинг (микро) землетрясения (микро землетрясение - это землетрясение относительно низкой интенсивности); мониторинг микроразрыва, при котором наблюдение за землетрясениями ведется по разрывам пластов, вызванных жидкостями, активно попадающими в подпочву (например, для создания подземных разрывов); и тому подобное.
[0037] В некоторых вариантах реализации, при использовании данных о поступательном и вращательном движении для осуществления определения представления скорости волнового поля, расчет не должен проводиться на основе показаний сейсмических датчиков поступательного движения для определения представления скорости волнового поля. В некоторых вариантах установка близко расположенных (в пределах заранее определенного расстояния) датчиков поступательного движения может быть использована для измерения разницы между временем вступления волнового поля в соответствующие датчики поступательного движения. Эта разница во времени вступления может затем быть использована для определения кажущейся скорости на определенном сейсмическом датчике поступательного движения. Использование установки сейсмических датчиков поступательного движения для определения кажущейся скорости может увеличить сложность.
[0038] В некоторых вариантах реализации, при использовании определенных методик и механизмов определение представления скорости волнового поля может быть осуществлена «локально» и основываться на прямом использовании одиночного датчика в сборе, который включает датчики поступательного и вращательного движения. Несмотря на локальное определение представления скорости волнового поля, стоит отметить, что это локальное определение представления скорости волнового поля может быть сделано при организации сбора данных, что предполагает систему (например, установку) различных сейсмических датчиков. Также отметим, что определение представления скорости волнового поля может основываться на измерениях различных датчиков в сборе.
[0039] В некоторых вариантах выполнения при использовании определенных методик и механизмов определение скорости волнового поля может осуществляться различными способами организации, включая вариант с относительно редким расположением сейсмических датчиков (например, узловые датчики).
[0040] Также, несмотря на указанное здесь определение представления скорости волнового поля, в связи с проведением сейсмических исследований подземных структур, для их характеристики, согласно некоторым вариантам выполнения, могут использоваться методики и механизмы для определения представления скорости волнового поля в контексте других типов исследований, таких как исследования для отображения человеческих тканей, отображения механических конструкций и так далее. В этих вариантах реализации, оборудование для исследования может содержать датчики (например, датчик звуковых колебаний, геофон и т.д.) для получения данных о поступательном и вращательном движении. Оборудование для исследования также может включать активный источник, создающий звуковые колебания, которые распространяются в намечаемой к разработке структуре (напр. человеческая ткань, механическая конструкция и т.д.). В общем, сейсмическим датчиком (или сейсмическим датчиком поступательного движения) может называться сейсмический датчик для исследования подземных структур или звуковой датчик, для исследования другого типа намечаемой к разработке структуры.
[0041] Как указано выше, данные о вращательном движении могут быть измерены датчиком вращения. Данные о вращательном движении относятся к вращательному движению сейсмического волнового поля. Пусть для примера один тип датчика вращения будет датчик R-1 компании Eentec, находящейся в Сент-Луисе, штат Миссури. В других примерах могут быть использованы другие датчики вращения.
[0042] Данные о вращении учитывают скорость вращения (или измерение во вращении со временем) вокруг горизонтальной оси, например, вокруг горизонтальной оси (X) (вдоль линии наблюдения) и/или вокруг горизонтальной поперечной оси (Y) и/или вокруг вертикальной оси (Z). В случае морских исследований ось X - как правило, параллельна направлению движения морской косы или датчиков исследования. Поперечная ось Y, как правило, ортогональна оси X. Вертикальная ось Z, как правило, ортогональна обеим осям X и Y. При наземных сейсмических исследованиях ось X можно выбрать в горизонтальном направлении, а поперечная ось Y может быть любой ортогональной оси X.
[0043] В некоторых случаях датчик вращения может быть представлен многокомпонентным датчиком вращения, способным осуществлять измерение скоростей вращения вокруг различных ортогональных осей (например, RX вокруг оси X, RY вокруг поперечной оси Y и RZ вокруг вертикальной оси Z). Обычно Ri представляет данные о вращении, где индекс i представляет ось (X, Y или Z), вокруг которой происходит вращение.
[0044] В некоторых случаях данные о вращении могут быть получены в двух ортогональных компонентах. Первая компонента направлена к источнику (вращение вокруг поперечной оси Y, в плоскости, образуемой осями X-Z), а вторая компонента перпендикулярна первой компоненте (вращение вокруг оси X, в плоскости, образуемой осями Y-Z). При такой геометрии данные о вращении в плоскости X-Z находятся под влиянием прямых лучей, а перпендикулярная компонента будет испытывать влияние боковых рассеянных волн.
[0045] Так как источники (активные или пассивные) могут находиться на любом расстоянии и в любом направлении от места нахождения датчика вращения, первая компонента может не указывать в сторону источника, в то время как вторая компонента может не быть перпендикулярной направлению исследования. В этих случаях может применяться следующая предварительная обработка, которая математически вращает компоненты под описанную выше геометрию. Такой процесс называется векторным вращением и предоставляет данные, отличные от полученных данных о вращении, к которым было применено векторное вращение. Полученные вращательные компоненты RX и RY перемножаются на матрицу, которая является функцией угла θ между осью X вращательного датчика и направлением источника по датчику вращения:
[0046] Вышеуказанная операция дает необходимое вращение в плоскости Y-Z (RC) и плоскости X-Z (RI).
[0047] Другой возможный шаг предварительной обработки - это время интегрирования (t) данных о вращении. Этот шаг математически записывается в следующем виде:
[0048] Вышеуказанное время интегрирования данных о вращательном движении дает сдвиг фазы формы волны и сдвиг ее спектра в стороны более низких частот.
[0049] Данные о вращении (например, RX и/или RY) могут быть использованы для определения горизонтальной медленности (или скорости) в двух ортогональных направлениях, X и поперечном Y(pX и pY соответственно). Действительная горизонтальная медленность p может быть определена из горизонтальной медленности по осям X и Y:

[0050] px=p для волн, которые распространяются вдоль оси X. py=p для поперечно распространяющихся волн.
[0051] На фиг. 1 изображена схема установки датчиков в сборе100 (места расположения датчиков), используемых для наземных сейсмических испытаний. Заметим, что методики или механизмы могут также применяться в установках для морских исследований. Датчики в сборе 100 используются на поверхности земли 108 (в ряд или группой или в другой расстановке). Если датчик в сборе 100 находится на поверхности земли, то это означает, что датчик в сборе 100 либо находится на поверхности земли, либо закопан (полностью или частично) под поверхностью земли, так что датчик в сборе 100 находится примерно в 10 метрах от поверхности земли, хотя в некоторых вариантах выполнения может применяться другое расположение в зависимости от используемого оборудования. Поверхность земли 108 находится над подземной структурой 102, которая содержит, по меньшей мере, один интересующий подземный элемент 106 (например, залежи углеводородов, источники пресной воды, зоны нагнетания газа и так далее).
[0052] Один или большее число сейсмических источников 104 (также называемых «регулируемые сейсмические источники»), к которым относятся вибраторы, пневматические пушки, взрывные устройства и т.д., используются в области исследования, в которой расположены сейсмические источники 100. Один или большее число сейсмических источников 104 находятся на поверхности земли 108. Один или большее число сейсмических источников 104 активируются в ответ на регулирование оператором исследования, например, регулирующие сигналы, исходящие из системы 116 управления на сейсмический (е) источник (и) 104. Активация сейсмических источников 104 вызывает распространение сейсмических волн в подземной структуре 102.
[0053] Как указано выше, вместо использования активных сейсмических источников для регулирования источника или активных исследований, согласно некоторым вариантам выполнения могут использоваться методики в плане проведения пассивных исследований (в которых нет активных сейсмических источников).
[0054] Сейсмические волны, отраженные от подземной структуры 102 (и от интересующего подземного элемента 106) распространяются по направлению к датчику в сборе 100. Сейсмические датчики 112 (например, геофоны, датчики ускорения или другие датчики поступательного движения) в соответствующих датчиках в сборе 100 получают данные о поступательном движении соответствующих сейсмических волн, отраженных от подземной структуры 102. Более того, в некоторых вариантах выполнения датчики в сборе 100 включают датчики 114 вращения, разработанные для исследования данных о вращательном движении. В некоторых случаях можно предположить, что импульсная характеристика датчика 114 вращения известна и должным образом компенсирована, другими словами данные о вращательном движении должны быть откалиброванными в соответствии с данными о поступательном движении.
[0055] Несмотря на то, что датчик в сборе 100 представлен с обоими датчиками: сейсмическим датчиком 112 и датчиком 114 вращения, заметим, что в других вариантах выполнения датчики 112 и датчики 114 вращения могут быть включены в отдельные датчики в сборе.
[0056] В некоторых вариантах реализации в датчики в сборе 100 также могут быть включены другие типы датчиков, включая датчики отклонения (рассматривается ниже).
[0057] В некоторых вариантах реализации датчики в сборе 100 взаимосвязаны посредством электрического кабеля 110 с системой 116 управления. В других случаях вместо соединения датчиков в сборе 100 с электрическим кабелем 110 датчики в сборе 100 могут соединяться по беспроводной связи с системой 116 управления. В некоторых вариантах промежуточные передатчики или концентраторы могут располагаться в промежуточных точках сети датчиков в сборе 100, что позволяет сообщение между датчиками в сборе 100 и системой 116 управления.
[0058] Система 116 управления, которая изображена на фиг. 1, включает модуль 120 определения скорости, способный работать с одним или несколькими процессорами 122. Процессор(ы) 122 подсоединен(ы) к носителю 124 информации (например, одно или несколько дисковых накопителей информации и/или один или несколько запоминающих устройств). На примере фигуры 1 носитель 124 информации используется для хранения данных 126 о поступательном движении, которые передаются от сейсмических датчиков 112, датчиков в сборе 100 к системе 116 управления. Он также используется для хранения данных 128 о вращательном движении, которые передаются от датчиков 114 вращения или выводятся из близко расположенных раздельных сейсмических датчиков. Носитель 124 информации может быть использован для хранения данных отклонения (не показано) в вариантах выполнения, в которых использовались датчики отклонения.
[0059] Хранящиеся данные 126 о поступательном движении могут включать данные о вертикальном поступательном движении (данные о поступательном движении относительно оси Z), записывается Uz, то есть данные о поступательном движении в вертикальном направлении (Z). Uz измеряется вертикальной компонентной сейсмического датчика 112. В некоторых случаях хранящиеся данные 126 о поступательном движении также могут включать данные о горизонтальном поступательном движении (данные по оси X и/или Y). Данные о поступательном движении в направлении осей X и Y также называются горизонтальными векторными компонентами и записываются соответственно UX и Uy. Данные UX и/или Uy могут быть измерены соответствующими компонентами X и Y сейсмического датчика 112.
[0060] При работе модуль 120 определения скорости используется для определения представления скорости волнового поля на основе данных о поступательном движении 126 и вращательном движении 128. Не изображено, что система 116 управления может включать другие модули, которые указаны выше и которые могут использовать определение представления скорости волнового поля для дальнейшей обработки.
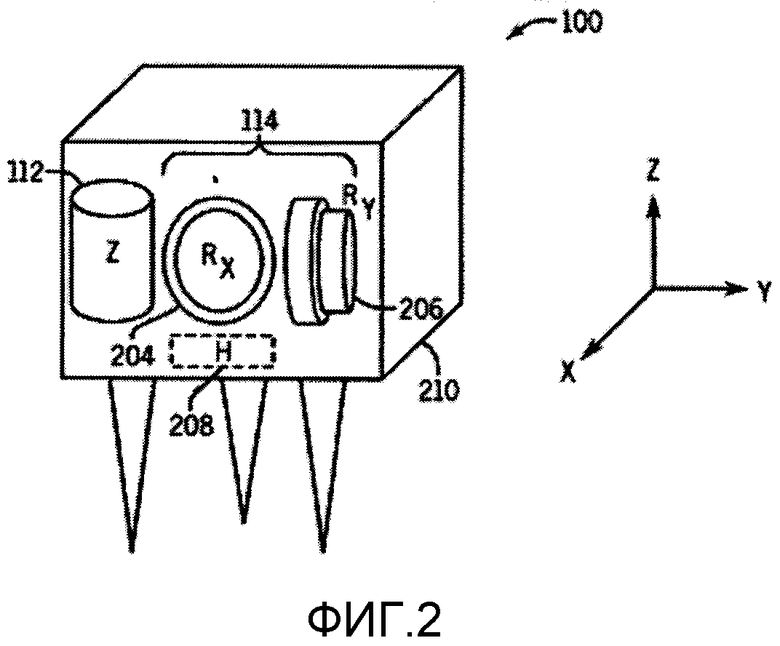
[0061] На фиг. 2 изображен пример датчика в сборе 100 (или системы датчиков) согласно некоторым примерам. Датчик в сборе 100 может включать сейсмический датчик 112 для измерения данных о поступательном движении (например, перемещение, скорость, ускорение и т.д.) обычно вдоль определенной оси, например, оси Z. Несмотря на то, что расчетное смещение сейсмического датчика 112 необходимо для измерения данных о вращении вокруг оси Z, погрешности при смещении или допуски на обработку (связаны с производством и конструкцией датчика в сборе 100) могут вызвать некоторое отклонение полученных данных о поступательном движении. Так полученные данные о поступательном движении проходят ручную коррекцию (согласно заранее определенному допуску) относительно оси Z. В некоторых случаях датчик в сборе 100 может также включать датчики для получения данных о поступательном движении, обычно вдоль осей X и Y.
[0062] Кроме того, датчик в сборе 100 включает датчик 204 вращения для определения поперечной скорости вращения (RX) обычно вокруг оси X, и другой датчик 206 вращения для измерения осевой скорости вращения (Ry) вокруг поперечной оси Y. Данные о вращении RX или RY обычно для осей X и Y соответственно, несмотря на расчетное смещение датчиков 204 или 206 вращения, необходимы для получения данных о вращательном движении вокруг осей X или Y. Погрешности при смещении или допуски на обработку могут вызвать определенные отклонения полученных данных о вращении, так что они проходят ручную коррекцию (согласно заранее определенному допуску) по осям X или Y.
[0063] В некоторых случаях, датчик вращения используется для измерения вертикальной скорости вращения (Rz), обычно на вертикальной оси (Z) также может быть датчик в сборе 100. Снова, погрешности при смещении или допуски на обработку могут вызвать удаление (согласно заранее определенному допуску) от вертикальной оси (Z). В других случаях датчик в сборе 100 может включать только один из датчиков 204 или 206 вращения. Датчик в сборе 100 снабжен муфтой 210, которая включает датчики 112, 204 и 206. В вариантах выполнения согласно фиг. 2, датчик (204 или 206) вращения считается расположенным в одном муфте 210 вместе в сейсмическим датчиком 112.
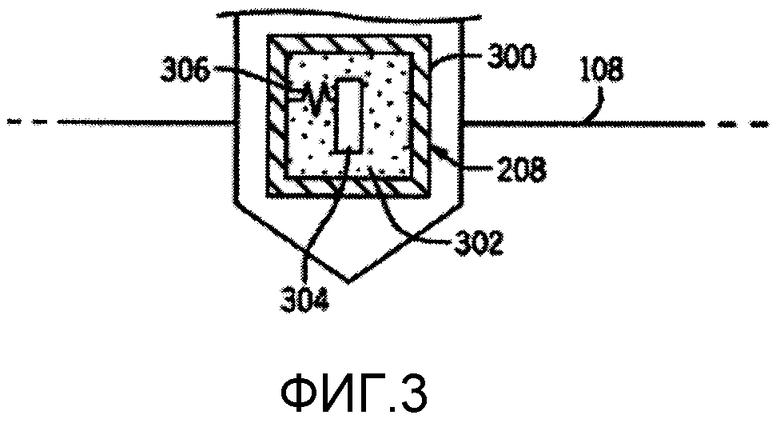
[0064] Датчик в сборе 100 включает (пунктирный профиль) датчик 208 отклонения, который может быть включен в некоторых примерах датчика в сборе 100, но без которого можно обойтись в других примерах. В некоторых случаях при удалении или подавлении шума, данные отклонения, полученные от датчика 208 отклонения, могут использоваться в качестве базовой модели при исследовании подавления шума. Модель шума, полученная по данным об отклонении, может быть использована вместе с методикой определения скорости волнового поля для некоторых вариантов выполнения (методика основана на данных о вращательном движении) при исследовании подавления шума.
[0065] Пример датчика 208 отклонения изображен на фиг. 3. Датчик 208 отклонения имеет закрытый уплотненный контейнер 300. Контейнер 300 включает объем жидкости 302 (или другого материала, например, гель или твердое вещество, как песок или пластик) внутри контейнера 300. Более того, контейнер 300 включает гидрофон 302 (или другой тип датчика давления), погружаемый в жидкость 304 (или в другой материал). Гидрофон 304 механически отделяется от стенок контейнера 300. В результате гидрофон 304 чувствителен к акустическим волнам, возбужденным в жидкости 302 через стенки контейнера 300. Чтобы сохранить фиксированное положение, гидрофон 304 крепится к соединительному механизму 306, который гасит акустические волны, которые распространяются в соединительном механизме 306. К примерам жидкости 302 относят: керосин, минеральное масло, растительное масло, кремниевое масло и воду. В некоторых случаях могут быть использованы другие типы жидкостей и материалов.
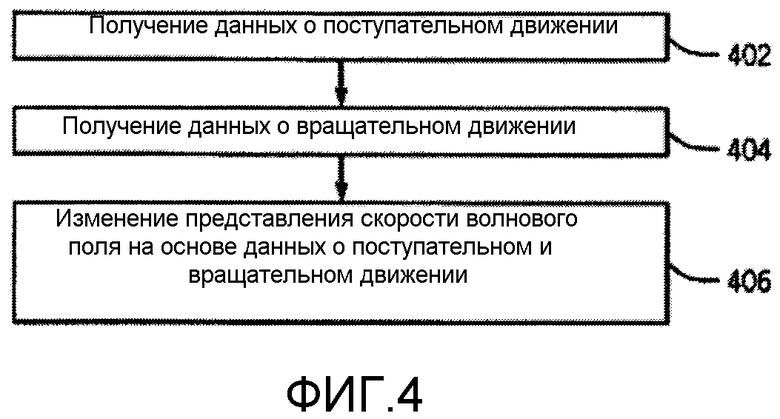
[0066] На фиг. 4 изображена схема последовательности операций способа в некоторых вариантах реализации. Способ на фиг. 4 может быть выполнен модулем 120 определения скорости в системе управления 116 на фиг. 1 или любой другой системой управления. Система получает (на 402) данные о поступательном движении, которые приняты, по меньшей мере, одним сейсмическим датчиком поступательного движения. В некоторых вариантах реализации полученные данные о поступательном движении являются ответом на активацию, по меньшей мере, одного сейсмического источника (например, 104 на фиг. 1).
[0067] В процессе система получает (на 404) данные о вращательном движении, которые приняты, по меньшей мере, одним сейсмическим датчиком вращательного движения. В некоторых вариантах реализации полученные данные о вращении могут включать данные о горизонтальном вращении, обычно это вращение вокруг горизонтальной оси (X и/или Y).
[0068] В дальнейшем, в соответствии со способом, осуществляется (на 406) определение представления скорости волнового поля на основе данных о поступательном и вращательном движении. Определение представления скорости волнового поля может зависеть от частоты. Определение представления скорости волнового поля может быть проведено для определенной частоты исследуемого волнового поля, или могут быть осуществлены различные определения представления скорости волнового поля соответствующие различным частотам исследуемого волнового поля. Определение представления скорости волнового поля может быть использовано для дальнейшей обработки, например, для подавления шума, разделении компонентов волнового поля, накапливания и других задач, связанных с проведением сейсмических исследований, характеризующих подземную структуру. Характеристика подземной структуры может включать создание снимка подземной структуры, создание модели подземной структуры и т.д.
[0069] Как указано выше, определение представления скорости волнового поля может включать кажущуюся скорость, медленность или другие показатели скорости волнового поля. Кажущаяся скорость (которая соответствует уклону сейсмического объекта в пространственно-временной области) связана с обратной горизонтальной медленностью p (кажущаяся линейная медленность pX и поперечная медленность pY). Горизонтальная медленность p остается неизменной на траектории луча (траектория сейсмического волнового поля) и она также связана с направлением распространения волн в пределах подземной структуры. Например, угол распространения (относительно горизонтальной оси Z) выглядит как α=asin(pX·VP) для P волн, где VP представляет действительную скорость P волн в данном месте в пределах подземной структуры. Угол распространения выглядит как α=asin(pX•VS) для S волн, где VS представляет действительную скорость S волн в данном месте положения в пределах подземной структуры. В дальнейшем кажущаяся скорость равна 1/pX.
[0070] Знание медленности p может позволить определить траекторию сейсмического луча (для известной земной модели, определяющей действительные скорости VS и VP, где земная модель представляет подземную структуру) или соответственно позволяет определить свойства (VS, VP), если известна траектория луча. Например, при рассмотрении горизонтально распространяющихся поверхностных волн (например, поверхностного шума), знание p (для различных частот) в данной сборке датчика предоставляет информацию о скорости приповерхностных поперечных волн ниже данного датчика в сборе. В другом аспекте реализации может использоваться кажущаяся скорость волн для отличия медленно распространяющегося поверхностного шума от более быстрых интересующих сигналов отражения.
[0071] В общем, определение представления скорости волнового поля, будь она выражено в виде кажущейся медленности (например, p), кажущейся скорости (например, VS, VP) или любом виде, указывающем скорость волнового поля, может быть использовано для различных случаев, относящихся к исследованию намечаемой к разработке структуры, например, подземной структуры.
[0072] Учитывая граничные условия (свободная поверхность или поверхность земли для исследования земли или морское дно для морского исследования), можно показать, что данные о поперечном вращательном движении RY, дифференцируемые по времени, равны (или пропорциональны, если не откалиброваны должным образом) линейной пространственной производной данных о вертикальном поступательном движении UZ:

[0073] По аналогии, дифференцируемые по времени данные о линейном вращении Rx равны (или пропорциональны, если не откалиброваны должным образом) поперечной пространственной производной данных о вертикальном поступательном движении UZ:

[0074] Приведенные уравнения ∂X и ∂Y представляют удаление в направлении оси X и удаление в направлении Y соответственно, и относительно малые расстояния, по сравнению с длиной волны интересующего волнового поля.
[0075] Уравнения 1 и 2 можно переписать:
где pX=∂t/∂X и pY=∂t/∂Y - это линейная и поперечная горизонтальная медленности соответственно. Значение ∂t представляет собой смещение по времени.
[0076] Уравнения 3 и 4 показывают, что данные о горизонтальном вращении (RX и RY) это медленная версия данных о вертикальном поступательном движении(записывается соответственно pY и pX). Другими словами, данные о горизонтальном и вертикальном вращении находятся в фазе и связаны коэффициентом пропорциональности (равны, когда нормально откалиброваны) с определением представления скорости (кажущейся медленности или скорости). Эти взаимоотношения не зависят от выбранного типа волнового поля (например, P волна, S волна, волна Рэлея и т.д.).
[0077] В результате в любое время кажущаяся медленность (например, pX и/или pY) может быть прямо оценено по данным о вращении RY (и/или Rx соответственно) и вертикальном поступательном движении Uz (согласно уравнению 3 или 4)независимо от типа интересующего волнового поля. Иными словами, при работе каждый раз индивидуально (и независимо), при условии наличия данных о вращательном и поступательном движении, можно получить мгновенную медленность. Временной набор данных (более коротко набор данных) относится к полученным данным в определенной точке в определенное время, причем полученные данные содержат данные о поступательном и вращательном движении.
[0078] Получение горизонтальной медленности (или обратной кажущейся фазовой скорости) мгновенно (на индивидуальной основе) может давать достаточно высокие результаты разрешения. В различных примерах различные устройства могут в определенных случаях рассматриваться вместе, например, когда данные о поступательном движении (Uz) стремятся к нулю или другому относительно малому значения, или когда полученные данные (включая данные о вращательном и поступательном движении с относительно большим шумом). Заметим, что расчет медленности согласно уравнению 3 или 4 можно переписать в следующем виде:

[0079] В случаях, когда Uz стремится к малому значению или когда полученные данные имеют большие помехи (шум), при совместном рассмотрении множественного набора данных можно сгладить/стабилизировать результаты. Совместное рассмотрение множественного набора данных может быть осуществлено при использовании заранее определенного интервала времени, полученные при этом данные, в пределах этого интервала времени, собираются вместе для расчета медленности (или обратной кажущейся скорости).
[0080] В некоторых случаях расчет отношения Ry (или Rx или R1 после вращения, как указано выше) к Uz основан на множественном наборе данных в пределах определенного интервала времени может выполняться в любой интервал времени или частотный диапазон. В некоторых случаях, расчет этого отношения может основываться на применении сингулярной декомпозиции (СД) сигналов (полученные данные содержат данные о вращательном и поступательном движении) в каждый отдельный интервал времени; такой расчет выполняется в этом интервале времени. В различных случаях амплитуда среднеквадратичного значения (СКЗ) может использоваться для расчета отношения RY (или RX) к Uz, которое может выполняться либо в интервале времени, либо в диапазоне частот.
[0081] В других случаях, объединение набора данных о вращении и поступательном движении в каждом интервале времени может быть средним (или общим, например, суммой и т.д.) по данным о вращательном и поступательном движении соответственно. В каждом из уравнений 5 и 6 величины RY, RX и Uz могут быть заменены соответствующими суммарными значениями, например,  (которое представляет среднее или другое общее значение Ry в установленные интервалы времени),
(которое представляет среднее или другое общее значение Ry в установленные интервалы времени),  (которое представляет среднее или другое общее значение Rx в установленные интервалы времени) и
(которое представляет среднее или другое общее значение Rx в установленные интервалы времени) и  (которое представляет среднее или другое общее значение Uz в установленные интервалы времени).
(которое представляет среднее или другое общее значение Uz в установленные интервалы времени).
[0082] На фиг. 5 проиллюстрирована схема способа осуществления определения представления скорости волнового поля (например, pX и pY) на основе множественного набора данных в указанном интервале времени. Способ на фиг. 5 может быть реализован с помощь модуля определения скорости 120 на фиг. 1 системы управления 116 или другой системе управления.
[0083] Способ на фиг. 5 предполагает установку (на 502) заранее определенного интервала времени. Затем в соответствии со способом получают (в 504) множественный набор данных в интервале времени. Каждый из интервалов времени включает данные о вращательном движении (полученные, по меньшей мере, одним датчиком вращения) и поступательном движении (полученные, по меньшей мере, одним датчиком).
[0084] В соответствии со способом суммируются (на 506) полученные данные в различных интервалах времени в пределах интервала времени, например, на основе метода сингулярной декомпозиции, амплитуды среднеквадратичного значения или других методов суммирования, как рассматривалось ранее.
[0085] На основе суммированных данных о вращении и поступательном движении на фиг. 5 (на 508) осуществляется определение представления скорости волнового поля (например, pX и pY).
[0086] Способ, в соответствии с проиллюстрированным на фиг. 5, может быть выбран для последовательных интервалов времени. Иными словами, учитываются заданный заранее определенный интервал времени, различные интервалы времени. Для каждого из различных интервалов времени способ на фиг. 5 применяется к множественному набору данных в соответствующем интервале времени, и определение представления скорости волнового поля рассчитывается для каждого соответствующего интервала времени.
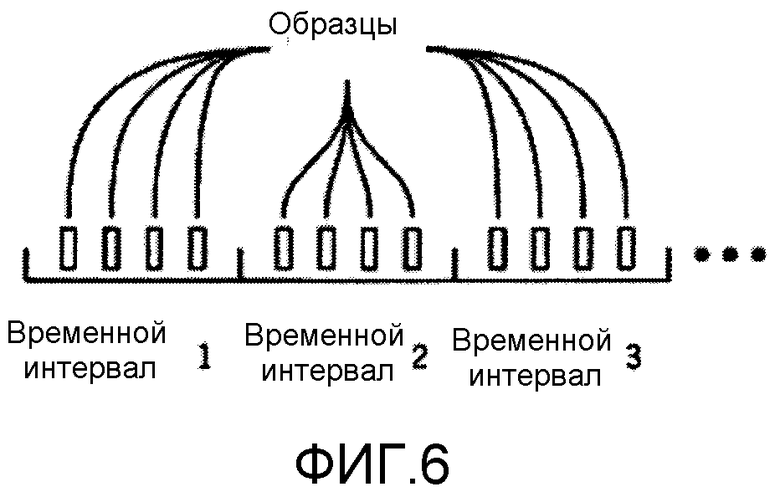
[0087] Различные интервалы времени могут быть дискретными интервалами, как показано на фиг. 6 (на которой изображены интервалы времени 1, 2, 3 и т.д.). Во время каждого интервала времени осуществляется четыре набора данных согласно описанному примеру (в других случаях можно выбрать разные числа интервала времени). При дискретных интервалах времени набор данных в любом первом интервале времени являются взаимоисключающими по отношению ко второму интервалу времени (иными словами, никакие два интервала времени не имеют один и тот же набор данных).
[0088] На фиг. 7 изображен другой пример, в котором различные последовательные интервалы времени являются скользящими. При использовании скользящих интервал два последовательных интервала времени накладываются друг на друга. На фиг. 7 изображены скользящие интервалы 1, 2, 3 и т.д. Из-за наложения два последовательных временных интервала имеют некоторое общее число (один или более) набор данных. На примере на фиг. 7 три набора 702 данных скользящего интервала 1 принадлежат скользящему интервалу 2.
[0089] Анализ согласно некоторым вариантам выполнения, в которых рассчитывается медленность для каждого образца частот (или диапазона частот) с помощью одного из вышеуказанных методов. Это дает кажущуюся скорость волн как функцию частоты (называемых кривыми рассеяния). При рассмотрении волн Рэлея кривые рассеяния могут использоваться для получения скорости S волны вблизи поверхности.
[0090] Способы, проиллюстрированные на фиг. 4-5, могут применяться для инструкций, пригодных для машинного считывания (например, модуль 120 на фиг. 1). Пригодные для машинного считывания инструкции загружаются в процессор или в систему процессоров (например, 122 на фиг. 1). В состав процессора могут входить микропроцессор, микроконтроллер, процессорный блок или подсистема, программируемая интегральная схема, программируемая логическая матрица или другое устройство управления или расчета.
[0091] Данные и инструкции хранятся в соответствующих накопителях информации, в виде одного или нескольких носителей. Накопитель информации содержит различные виды памяти, включая полупроводниковые запоминающие устройства, например, динамическое или статическое оперативное записывающее устройство (ДОЗУ или СОЗУ), стираемое программируемое портативное записывающее устройство (СППЗУ), электрически стираемое программируемое постоянное записывающее устройство (ЭСППЗУ) и флеш-ПЗУ; другие электрически стираемые программируемые постоянные записывающие устройства и флеш-ПЗУ; магнитные диски, такие как жесткие, гибкие и съемные магнитные диски; другие магнитные носители информации, включая ЗУ на ленте; оптические носители, такие как компакт-диски (CD) и цифровые диски (DVD); другие типы носителей информации. Заметим, что вышеуказанные инструкции могут быть пригодны для компьютерных или машинных накопителей информации, или они могут быть на различных носителях, пригодных для компьютеров или машин в большой системе с большим количеством узлов. Такие пригодные для компьютеров или машин носители информации считаются частью изделия (или изделия производства). Устройство или его серийный образец может относиться к любому одиночному или нескольким компонентам. Носитель информации может находиться либо в машине, выполняющей машинные инструкции, либо в удаленном месте, откуда по сети могут загружаться инструкции для выполнения.
[0092] В дальнейшем описании для обеспечения понимания, изложенного здесь предмета установлены различные детали. Однако, возможно использование и без некоторых из этих деталей. В других вариантах реализации могут быть использованы модификации и изменения вышеуказанных деталей. Предполагается, что прилагаемая формула изобретения учитывает эти модификации и изменения.


Изобретение относится к области геофизики и может быть использовано при проведении сейсморазведочных работ. Получены данные о вращательном и поступательном движении, принятые по меньшей мере одним датчиком движения. Осуществлено определение представления скорости волнового поля на основе данных о вращательном и поступательном движении. Определение представления скорости волнового поля содержит кажущуюся медленность волнового поля вдоль второй горизонтальной оси или кажущуюся скорость волнового поля вдоль второй горизонтальной оси. Причем вторая горизонтальная ось ортогональна первой горизонтальной оси. Кажущаяся медленность или кажущаяся скорость волнового поля основана на угле падения волнового поля относительно вертикальной оси и на фактической скорости волнового поля. Определение кажущейся медленности вдоль второй горизонтальной оси или кажущейся скорости вдоль второй оси содержит вычисление отношения данных о вращательном движении вокруг первой горизонтальной оси относительно данных о поступательном движении. Технический результат - повышение точности получаемых данных. 2 н. и 9 з.п. ф-лы, 7 ил.
1. Способ определения скорости волнового поля, который включает следующие этапы:
прием данных о поступательном движении, полученных, по меньшей мере, одним исследовательским датчиком поступательного движения, в ответ на активацию, по меньшей мере, одного активного исследовательского источника;
прием данных о вращательном движении вокруг первой горизонтальной оси, полученных, по меньшей мере, одним датчиком вращательного движения; и
определение представления скорости волнового поля на основе данных о поступательном и вращательном движении, причем определение представления скорости волнового поля содержит кажущуюся медленность волнового поля вдоль второй горизонтальной оси или кажущуюся скорость волнового поля вдоль второй горизонтальной оси, причем вторая горизонтальная ось ортогональна первой горизонтальной оси, при этом кажущаяся медленность или кажущаяся скорость волнового поля основана на угле падения волнового поля относительно вертикальной оси и на фактической скорости волнового поля, причем определение кажущейся медленности вдоль второй горизонтальной оси или кажущейся скорости вдоль второй оси содержит вычисление отношения данных о вращательном движении вокруг первой горизонтальной оси относительно данных о поступательном движении.
2. Способ по п. 1, в котором датчик вращения расположен в пределах того же корпуса, что и исследовательский датчик поступательного движения.
3. Способ по п. 1, в котором определение кажущейся медленности волнового поля или кажущейся скорости волнового поля содержит определение кажущейся горизонтальной медленности вдоль второй горизонтальной оси или кажущуюся горизонтальную скорость вдоль второй горизонтальной оси.
4. Способ по п. 1, который отличается тем, что определение представления скорости волнового поля осуществляется также при различных частотах.
5. Способ по п. 1, который отличается тем, что прием данных о поступательном и вращательном движении включает набор множественных данных о поступательном и вращательном движении; и этап оценки величины скорости волнового поля осуществляется на основании набора множественных данных о поступательном и вращательном движении.
6. Способ по п. 5, который отличается тем, что прием набора множественных данных о поступательном и вращательном движении включает множественные данные, находящиеся в пределах временного интервала заранее определенной протяженности.
7. Способ по п. 6, который отличается тем, что временной интервал является первым временным интервалом, а способ также включает следующие этапы: получение дальнейшего набора данных о поступательном и вращательном движении во втором временном интервале заранее определенной протяженности; и определение последующего представления скорости волнового поля на основе набора дополнительных данных о поступательном и вращательном движении.
8. Способ по п. 1, который отличается тем, что определение представления скорости волнового поля включает в себя расчет частотозависимого вывода скорости волнового поля.
9. Способ по п. 1, который отличается тем, что данные о поступательном движении представляют собой данные о поступательном движении вдоль вертикальной оси, и причем отношение представляет собой отношение данных о вращательном движении вокруг первой горизонтальной оси к данным о поступательном движении вдоль вертикальной оси.
10. Способ по п. 1, дополнительно содержащий вращение данных о вращательном движении, причем вычисление представления волнового поля основано на вращаемых данных о вращательном движении.
11. Система для определения скорости волнового поля, которая содержит:
носитель для хранения данных о вращательном движении, полученных, по меньшей мере, одним исследовательским датчиком вращения, а также данных о поступательном движении, полученных, по меньшей мере, одним датчиком поступательного движения в ответ на активацию одного активного исследовательского источника данных; и, по меньшей мере, один процессор, сконфигурированный с возможностью реализации способа по любому из предшествующих пунктов формулы изобретения.
| US 20100195439 A1,05.08.2010US 2657373 A, 27.10.1953US 20050180261 А1, 18.08.2005US 20100202251 A1, 12.08.2010US 5696734 A, 09.12.1997 |

