Предпосылки изобретения
Изобретение, в целом, относится к системе и способу сбора сейсмических данных.
Сейсмическая разведка предусматривает исследование геологических пластов на предмет залежей углеводородов. Разведка обычно предусматривает размещение сейсмического(их) источника(ов) и сейсмических датчиков в заранее определенных положениях. Источники генерируют сейсмические волны, которые распространяются в геологических пластах, создавая на своем пути изменения давления и вибрации. Изменения упругих свойств геологического пласта рассеивают сейсмические волны, изменяя их направление распространения и другие свойства. Часть энергии, излучаемой источниками, достигает сейсмических датчиков. В соответствии с зарегистрированными сейсмическими событиями, датчики генерируют электрические сигналы для формирования сейсмических данных. Анализ сейсмических данных позволяет выявить наличие или отсутствие вероятных мест залегания углеводородов.
Сущность изобретения
Согласно варианту осуществления изобретения, устройство включает в себя расстановку сейсмических сенсорных блоков, которые выполнены с возможностью проведения измерений, связанных с сейсмической разведкой, производимой на поверхности. Каждый сейсмический сенсорный блок включает в себя датчик движения частиц и датчик вращения.
Согласно другому варианту осуществления изобретения, способ включает в себя этап приема данных движения частиц и скорости вращения от расстановки сейсмических датчиков. Способ включает в себя этап обработки данных для получения изображения геологической среды.
Преимущества и другие признаки изобретения становятся очевидными из нижеприведенных чертежей, описания и формулы изобретения.
Краткое описание чертежей
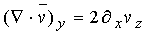
Фиг.1 - схема вибросейсмической измерительной системы согласно варианту осуществления изобретения.
фиг.2 - схема сейсмического сенсорного блока, который включает в себя геофон и два датчика вращения согласно варианту осуществления изобретения.
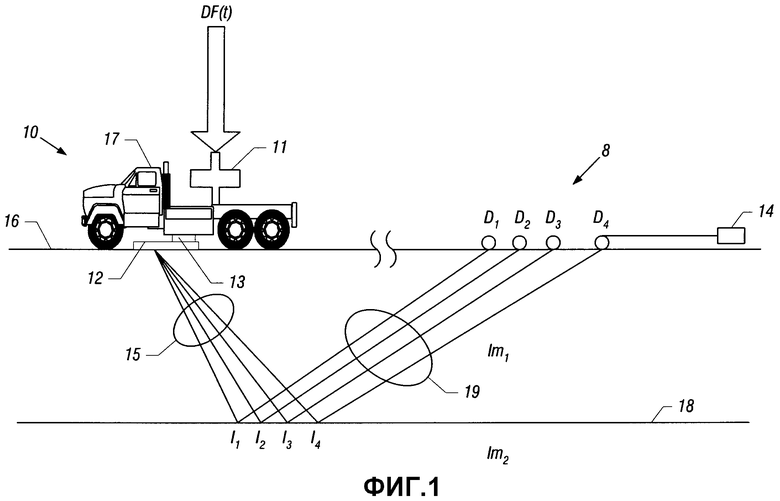
Фиг.3 и 6 - схемы расстановок сейсмических датчиков согласно уровню техники.
Фиг.4, 5, 7, 8 и 9 - схемы расстановок сейсмических датчиков согласно вариантам осуществления изобретения.
Фиг.10 - схема системы обработки данных согласно варианту осуществления изобретения.
Фиг.11 - результаты полевых испытаний, где указаны измеренные и расчетные градиенты вертикальной скорости, согласно варианту осуществления изобретения.
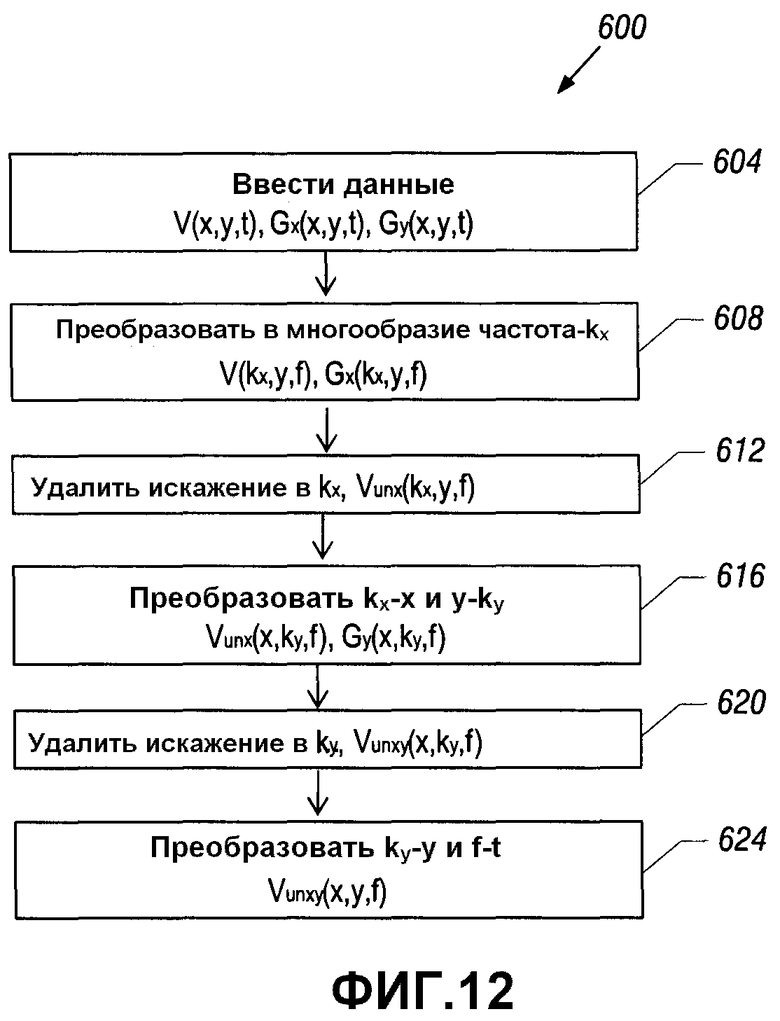
Фиг.12 - логическая блок-схема способа ослабления поверхностной волны согласно варианту осуществления изобретения.
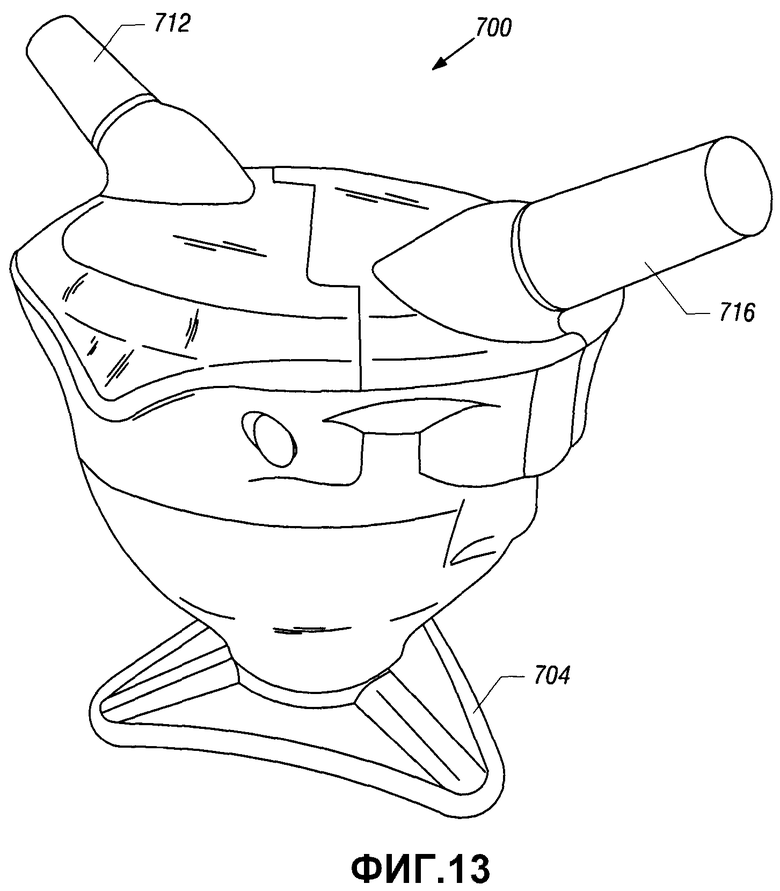
Фиг.13 - вид в перспективе сейсмического сенсорного блока согласно варианту осуществления изобретения.
Подробное описание
Сейсмическая разведка, производимая на поверхности (именуемая здесь "наземной сейсмической разведкой"), обычно проводится для построения изображений геологических структур в ходе разведки, эксплуатации и мониторинга углеводородных месторождений. При осуществлении такой разведки, активный сейсмический источник излучает энергию, которая отражается от глубинных отражающих горизонтов. Отраженная энергия регистрируется для формирования необработанных сейсмических данных, которые дополнительно обрабатываются для построения изображений геологических структур. Активный сейсмический источник может быть импульсным источником (например, взрывным зарядом) или вибрационным источником.
В качестве более конкретного примера, на фиг.1 показана вибросейсмическая измерительная система 8 в соответствии с вариантами осуществления изобретения. Система может содержать один сейсмический вибратор 10 (согласно фиг.1) или несколько сейсмических вибраторов; расстановку наземных сейсмических сенсорных блоков D1, D2, D3 и D4; и систему 14 сбора данных. Осуществляя часть операций, связанных с вибросейсмической разведкой, сейсмический вибратор 10 генерирует, по меньшей мере, один сканирующий вибрационный сейсмический сигнал. В частности, на фиг.1 показан глубинный сканирующий сигнал 15, генерируемый вибратором 10 в ходе разведки для подачи сканирующего вибрационного сейсмического сигнала в толщу земли. Граница раздела 18 между глубинными импедансами Im1 и Im2 отражает сигнал 15 в точках I1, I2, I3 и I4 с образованием отраженного сигнала 19, который регистрируется сейсмическими сенсорными блоками D1, D2, D3 и D4 соответственно. Система 14 сбора данных собирает необработанные сейсмические данные, полученные сейсмическими сенсорными блоками D1, D2, D3 и D4; и необработанные сейсмические данные обрабатываются для получения информации о глубинных отражающих горизонтах и физических свойствах геологических пластов.
Для генерации сигнала 15, сейсмический вибратор 10 может содержать активатор (например, гидравлический или электромагнитный активатор), который приводит в движение вибрационный элемент 11 в соответствии со сканирующим пилотным сигналом (обозначенным "DF(t)" на фиг.1). В частности, сигнал DF(t) может выражаться синусоидальной функцией, амплитуда и частота которой изменяются в ходе генерации сканирующего сигнала. Поскольку вибрационный элемент 11 связан с опорной плитой 12, которая контактирует с земной поверхностью 16, энергия от элемента 11 поступает в землю, создавая сигнал 15. Помимо других признаков, сейсмический вибратор 10 также может включать в себя устройство 13 измерения сигнала, которое включает в себя датчики (например, акселерометры) для измерения сигнала 15 (т.е. для измерения выходной земной силы сейсмического вибратора 10). Согласно фиг.1, сейсмический вибратор 10 может быть установлен на грузовике 17, что обеспечивает мобильность вибратора.
Заметим, что, в отличие от сейсмического вибратора 10, сейсмический вибратор может иметь альтернативную конструкцию для размещения в стволе скважины, в соответствии с другими вариантами осуществления изобретения. Кроме того, сейсмические сенсорные блоки, альтернативно, могут располагаться в стволе скважины для производства измерений с помощью энергии, вырабатываемой скважинными вибраторами. Хотя здесь описаны конкретные примеры наземных сейсмических источников и сейсмических сенсорных блоков, очевидно, что сейсмические сенсорные блоки и/или сейсмические источники могут располагаться в скважине в соответствии с другими вариантами осуществления изобретения. Также необходимо заметить, что, хотя на фиг.1 сейсмический вибратор показан как сейсмический источник, сейсмический источник другого типа (например, импульсный источник) можно использовать в соответствии с другими вариантами осуществления изобретения.
Традиционно, сейсмические сенсорные блоки могут содержать датчики движения частиц, например геофоны, регистрирующие продольную составляющую упругого волнового поля. В этом волновом поле преобладает медленно распространяющаяся поверхностная волна, которая маскирует более слабые почти вертикально распространяющиеся отражения от углеводородных коллекторов. Для ослабления регистрируемой поверхностной волны, данные, собранные датчиками движения частиц, можно подвергать фильтрации по углам наклона и скорости. Во избежание пространственного искажения, в этом способе традиционно применяют, по меньшей мере, по два геофона на наиболее медленную длину волны в направлении от источника к приемнику. Дополнительные геофоны в поперечном направлении также традиционно используются для ослабления рассеянной сейсмической энергии. Для слабо искаженных данных, геофоны могут быть разнесены приблизительно на 1,5 датчика на длину волны.
Альтернативно, традиционные сейсмические сенсорные блоки могут регистрировать движения частиц по трем ортогональным осям, что позволяет применять поляризационную фильтрацию (вместо фильтрации по углам наклона или скорости). Поляризационная фильтрация обычно опирается на девяностоградусный фазовый сдвиг между горизонтальной и вертикальной составляющими релеевской части поверхностной волны. Преимущество поляризационной фильтрации состоит в том, что станции датчиков движения частиц могут быть разнесены на большее расстояние, поскольку в этом случае минимально необходимое пространственное квантование зависит от более быстрых сейсмических отражений, ввиду ослабления более медленно распространяющейся поверхностной волны. Однако поляризационная фильтрация обычно дает худшие результаты, чем способ с использованием фильтрации по скорости с более плотно расположенными датчиками движения частиц.
Согласно фиг.2, в соответствии с описанными здесь вариантами осуществления изобретения, фильтрацию по скорости или углам наклона можно применять к данным, собранным расстановкой сейсмических сенсорных блоков 200 (на фиг.2 показан один сейсмический сенсорный блок 200) для ослабления шума, сопряженного с поверхностной волной. Однако сейсмические сенсорные блоки 200 можно разнести на большее расстояние, чем традиционные сейсмические сенсорные блоки, тем не менее, предотвращая пространственное искажение. В соответствии с вариантами осуществления изобретения, каждый сейсмический сенсорный блок 200 включает в себя датчик движения частиц, например геофон 202, который используется для измерения движения частиц по вертикальной оси (z) (см. оси 208); и, по меньшей мере, один датчик, предназначенный для измерения скорости вращения относительно горизонтальной оси. Применительно к конкретному примеру, показанному на фиг.2, сейсмический сенсорный блок 200 включает в себя геофон 202, предназначенный для регистрации или измерения скорости частиц по вертикальной оси z; датчик вращения 204, предназначенный для измерения поперечной скорости вращения относительно продольный оси x; и датчик вращения 206, предназначенный для измерения продольной скорости вращения относительно поперечной оси y. В соответствии с некоторыми вариантами осуществления изобретения, датчики 202, 204 и 206 могут располагаться в одном корпусе 201.
Заметим, что на фиг.2 показан лишь один из многих возможных вариантов осуществления сейсмического сенсорного блока в соответствии с изобретением. Например, в других вариантах осуществления изобретения, для двухмерной (2-D) пространственной расстановки, сейсмический сенсорный блок может включать в себя датчик движения частиц и единичный датчик вращения. В другой вариации, датчики сейсмического сенсорного блока могут быть, в целом, совмещены, но находиться в разных корпусах. Например, в соответствии с некоторыми вариантами осуществления изобретения, датчик 202 движения частиц может быть физически отделен от датчиков вращения 204 и 206 и подключен к датчикам посредством проводных или беспроводных соединений. Таким образом, можно предусмотреть многочисленные вариации в пределах объема формулы изобретения.
В порядке неограничительных примеров, для наземных приложений и приложений неглубокого залегания, датчиком вращения 204, 206 может быть трехосный датчик вращения Eentec R-1 производства Eentec, Сент-Луис, Миссури. В другом примере, датчик вращения 204, 206 может быть образован интерферометром и гироскопом Sagnac. Другие вариации предусмотрены в других вариантах осуществления изобретения.
Заметим, что на фиг.2 в составе сейсмического сенсорного блока 200 показаны только датчики 202, 204 и 206 в упрощенном виде для пояснения типов датчиков, присутствующих в блоке 200. Однако сейсмический сенсорный блок 200 может включать в себя другие компоненты, например усилители и другие электронные приборы для сбора сейсмических данных. Например, сейсмический сенсорный блок 200 может включать в себя схему для масштабирования данных, собранных датчиками 202, 204 и 206, для компенсации индивидуальных характеристик датчиков. Это масштабирование может быть частотно-зависимым для компенсации различий в чувствительности к амплитуде и фазе. Заметим, что масштабирование может, альтернативно, производиться на блоке записи или может осуществляться позже, во время обработки данных.
Благодаря включению, по меньшей мере, одного датчика вращения в сейсмический сенсорный блок 200, сейсмические сенсорные блоки могут быть разнесены на большее расстояние, по сравнению с разнесением, используемым для традиционных сейсмических сенсорных блоков. В частности, датчики вращения 204 и 206 генерируют сигналы, указывающие скорости горизонтального вращения относительно их соответствующих осей. Эта измеренная скорость горизонтального вращения, при измерении на поверхности, пропорциональна скорости наклона. Скорость наклона, для малых значений, пропорциональна пространственной производной вертикальной скорости поверхности. Поэтому измерение скорости горизонтального вращения на поверхности пропорционально пространственной производной вертикальной скорости, что позволяет применять теорему многоканального квантования для пространственной интерполяции измеренного сейсмического волнового поля в точках, отличных от положений сейсмических сенсорных блоков.
В общем случае, согласно теореме многоканального квантования, функцию и ее производную можно точно интерполировать, когда функция и ее производная квантованы с разнесением на, по меньшей мере, одну длину волны. Регистрируемая скорость V(t) и ее пространственная производная  равномерно квантуются в t=2kπ/Ω и могут быть восстановлены описанным ниже способом
равномерно квантуются в t=2kπ/Ω и могут быть восстановлены описанным ниже способом
 Ур.1
Ур.1
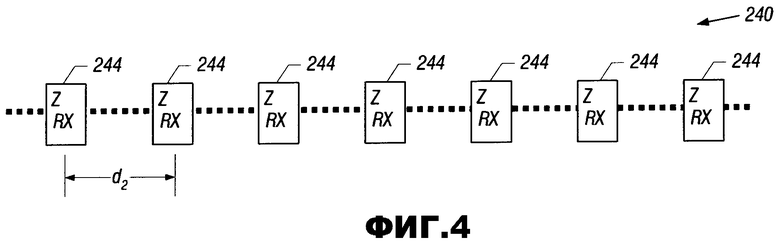
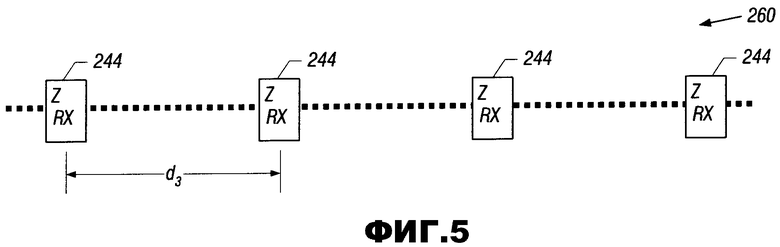
Согласно фиг.3, одномерная (1-D) пространственная расстановка 220 традиционных сейсмических датчиков имеет геофоны 224, разнесенные согласно разнесению (обозначенному как расстояние разнесения "d1" на фиг.3) двух геофонов 224 на наиболее медленную значимую длину волны поверхностной волны. Также согласно фиг.4, в соответствии с некоторыми вариантами осуществления изобретения, 1-D пространственная сейсмическая расстановка 240 может быть образована сейсмическими сенсорными блоками 244, каждый из которых содержит датчик движения частиц и, по меньшей мере, один датчик вращения. Сравнивая фиг.3 и 4, в соответствии с некоторыми вариантами осуществления изобретения, можно видеть, что сейсмические сенсорные блоки 244 могут иметь разнесение (обозначенное как расстояние разнесения "d2" на фиг.4), приблизительно такое же, как разнесение расстановки 220. Однако в силу теоремы многоканального квантования, расстановка 240 собирает данные значительно более высокого качества, благодаря данным скорости вращения. Для достижения такого же качества данных, как у расстановки 200, 1-D пространственную расстановку 260, показанную на фиг.5, можно альтернативно использовать в соответствии с другими вариантами осуществления изобретения. Сравнивая фиг.3, 4 и 5, можно видеть, что сейсмические сенсорные блоки 244 расстановки 260 разнесены на большее расстояние разнесения (обозначенное "d3" на фиг.5), которое значительно превышает расстояние разнесения d1 или d2. В частности, в соответствии с вариантами осуществления изобретения, расстояние разнесения d3 может быть равно одной длине волны с наименьшей значимой регистрируемой скоростью.
Таким образом, с использованием теоремы многоканального квантования, регистрируемое волновое поле вертикальных скоростей можно интерполировать в любой точке между двумя сейсмическими сенсорными блоками в пределах наиболее медленной значимой длины волны поверхностной волны. Для 2-D расстановок можно добиться аналогичного сокращения в поперечном направлении, хотя зачастую поперечное квантование уже является более разбросанным, чем продольное квантование. В результате, 2-D расстановки, используемые в 3-D сейсмике с учетом времени (где время является третьим измерением), могут использовать до четырех раз меньше сейсмических сенсорных блоков, чем традиционные расстановки, обеспечивая такое же качество данных. Это дает возможность значительно сократить монтажные работы в полевых условиях. В этом случае, количество каналов не изменяется пропорционально, и можно добиться сокращения количества каналов в отношении 4/3.
Для слабо искаженных данных, сейсмические сенсорные блоки (каждый из которых включает в себя, по меньшей мере, один датчик движения частиц и, по меньшей мере, один датчик вращения) могут быть разнесены приблизительно на 0,75 от наиболее медленной длины волны, по сравнению с разнесением в 1,5 длины волны в традиционных схемах, где собираются слабо искаженные данные.
Теорема многоканальной интерполяции, выраженная Ур. 1, применяется к бесконечному числу равномерно разнесенных сейсмических сенсорных блоков. Без существенной потери точности, количество сенсорных блоков можно ограничить достаточно малым числом (64, в порядке неограничительного примера). Для интерполяции меньшего количества сейсмических сенсорных блоков и/или неравномерно разнесенных сейсмических сенсорных блоков, можно применять способ, например, описанный в статье Ozbek, A., Ozdemir, A.K. and M Vassallo, Interpolation of Irregularly Sampled Data by Matching Pursuit, European Association of Geoscientists & Engineers, Expanded Abstracts (2008). Для интерполяции в двух пространственных измерениях, данные можно сначала интерполировать в одном направлении с использованием одномерного алгоритма, а затем интерполировать в другом направлении с использованием того же одномерного алгоритма.
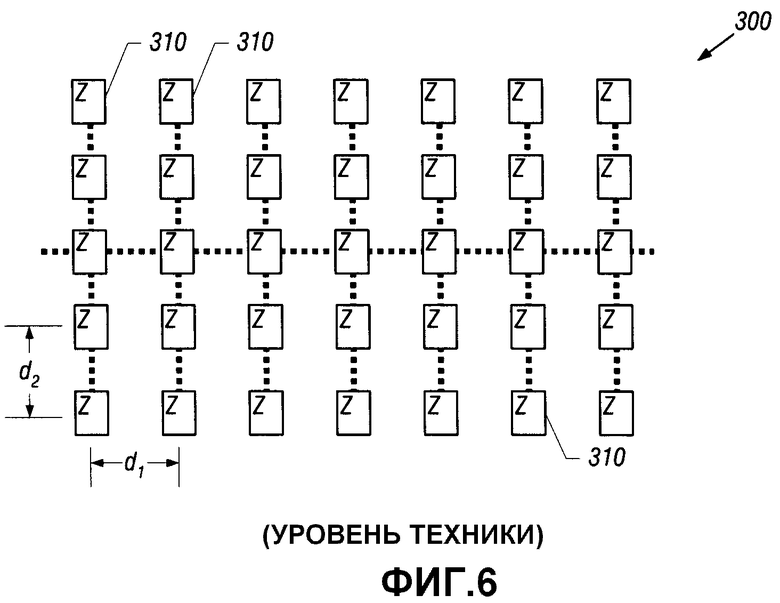
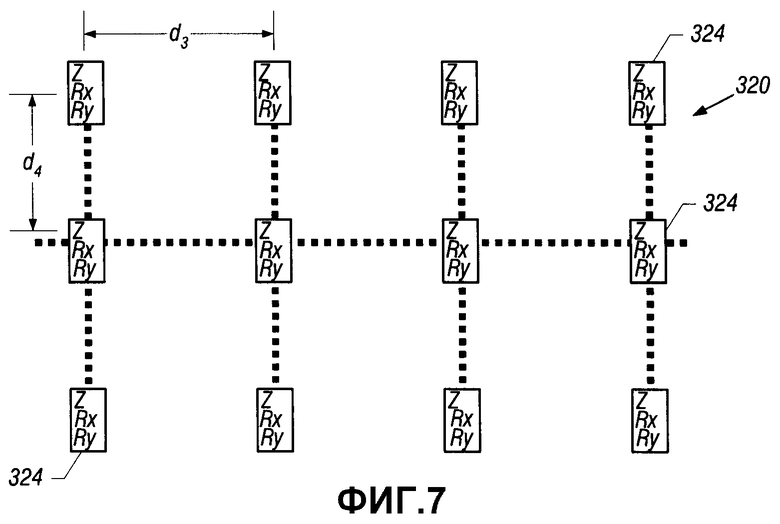
На фиг.6 показан традиционная 2-D пространственная расстановка сейсмических блоков 310, каждый из которых включает в себя только геофоны. В общем случае, расстановка 300 может иметь расстояние продольного разнесения (обозначенное "d1" на фиг.6) и расстояние поперечного разнесения (обозначенное "d2" на фиг.6), в результате чего геофоны оказываются разнесенными на половину длины волны. Расстановка 300 отличается от альтернативной расстановки 320 (см. фиг.7), которая может быть построена в соответствии с описанными здесь вариантами осуществления изобретения. Расстановка 320 включает в себя сейсмические сенсорные блоки 324, каждый из которых включает в себя датчик движения частиц и два датчика вращения. Расстановка 320 имеет расстояние продольного разнесения (обозначенное "d3" на фиг.7) и расстояние поперечного разнесения (обозначенное "d4" на фиг.7), которые значительно превышают расстояния разнесения d1 и d2, используемые в расстановке 300, показанной на фиг.6. В частности, расстояния разнесения d3 и d4 могут составлять приблизительно одну длину волны наиболее медленной значимой зарегистрированной волны. Таким образом, разнесение датчиков расстановки 320 удваивается в обоих горизонтальных направлениях по сравнению с традиционной расстановкой 300. Поэтому расстановка 320 имеет в четыре раза меньше сейсмических сенсорных блоков, чем традиционная расстановка 300, что позволяет значительно сократить количество кабелей и объем монтажных работ в полевых условиях.
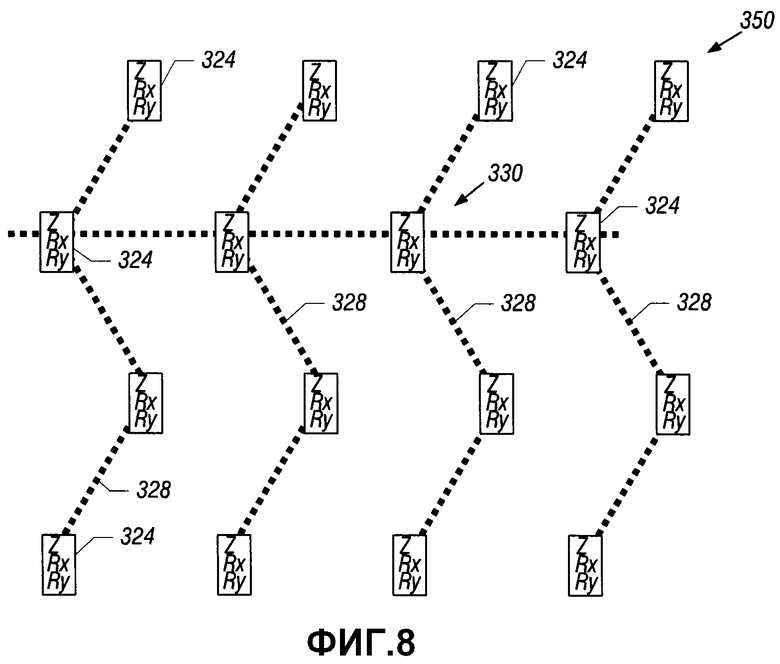
Заметим, что, в соответствии с другими вариантами осуществления изобретения, сейсмические сенсорные блоки расстановки могут быть не равномерно разнесены в виде прямоугольной сетки. Например, на фиг.8 показана расстановка 350 сейсмических сенсорных блоков 324 в соответствии с другими вариантами осуществления изобретения. Показано, что расстановка 350 включает в себя продольный путь 330 и поперечные пути 328, каждый из которых имеет ступенчатую или шестиугольную конфигурацию.
Благодаря описанному здесь увеличенному разнесению между сейсмическими сенсорными блоками, сейсмические сенсорные блоки могут быть особенно выгодны для разведки, проводимой в областях, имеющих препятствия. Для традиционных расстановок, эти препятствия могут не позволять разносить два сенсорных блока на длину волны для непрерывной интерполяции. Однако, благодаря более значительному разнесению, допускаемому описанными здесь сейсмическими сенсорными блоками, сравнительно крупные препятствия могут присутствовать, не нарушая изображение, полученное в результате разведки.
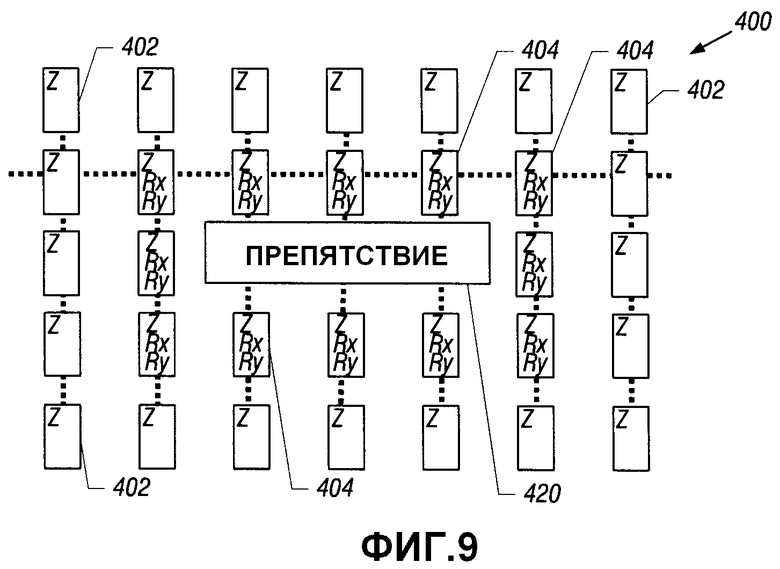
В частности, согласно фиг.9, в соответствии с некоторыми вариантами осуществления изобретения, расстановка 400 может включать в себя как сейсмические сенсорные блоки 402, содержащие только геофоны (т.е. блоки, не имеющие датчиков вращения), так и сейсмические сенсорные блоки 404, каждый из которых включает в себя геофон и, по меньшей мере, один датчик вращения. Согласно фиг.9, сейсмические сенсорные блоки 404, включающие в себя датчики вращения, располагаются вблизи препятствия 420. Благодаря увеличению допустимого разнесения сейсмических сенсорных блоков 404, препятствие 420 не нарушает геометрию разведки, и, таким образом, по-прежнему можно обеспечивать непрерывную интерполяция. Согласно фиг.9, сейсмические сенсорные блоки 402, не имеющие датчиков вращения, в целом, располагаются в областях, удаленных от препятствия 420. Другие вариации предусмотрены в пределах объема формулы изобретения.
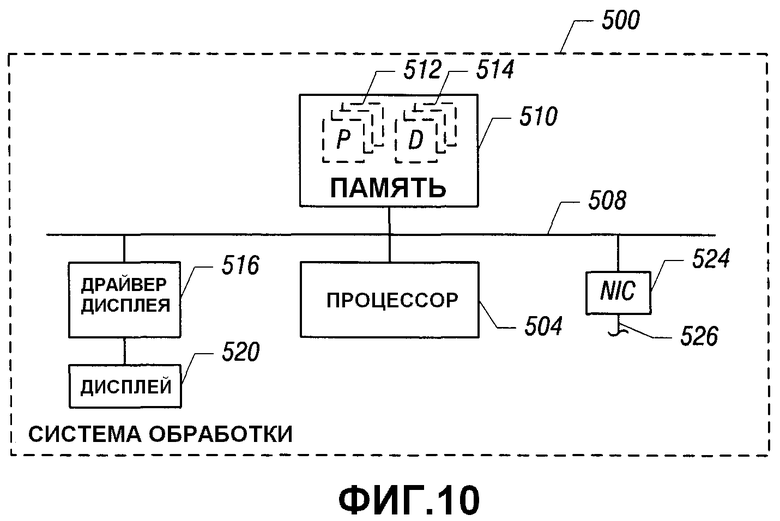
Согласно фиг.10, в соответствии с некоторыми вариантами осуществления изобретения, сейсмические данные, собираемые описанными здесь сейсмическими сенсорными блоками, можно обрабатывать с помощью системы обработки 500. Система обработки 500 может полностью или частично располагаться на расстановке или вне расстановки, в зависимости от конкретного варианта осуществления изобретения. В общем случае, система обработки 500 может включать в себя, по меньшей мере, один процессор 504, например микроконтроллер и/или микропроцессор. В общем случае, процессор 504 может быть подключен одной или несколькими шинами 508 к памяти 510, где хранятся различные программы 512 и массивы данных 514. Программы 512, при выполнении процессором 504, могут предписывать процессору 504 принимать данные, собранные датчиками вращения и движения частиц сейсмических сенсорных блоков; применять многоканальное квантование для интерполяции измерений движения частиц между положениями сенсорных блоков на основании принятых данных; применять фильтрацию по скорости или углам наклона; обрабатывать интерполированные/фактические измерения движения частиц и скорости вращения для получения изображения геологической среды; и т.д. Первоначальные, промежуточные или окончательные результаты обработки могут храниться в виде массивов данных 514 в памяти 510.
Заметим, что на фиг.10 показан лишь один пример из многих возможных архитектур системы обработки 500. Таким образом, можно предусмотреть многочисленные вариации в пределах объема формулы изобретения. Например, в соответствии с другими вариантами осуществления изобретения, система обработки 500 может быть распределенной системой обработки, и, таким образом, может включать в себя подсистемы обработки, которые соединены друг с другом и могут находиться в разных местах.
Для системы обработки 500, показанной на фиг.10, система обработки 500 может включать в себя драйвер 516 дисплея, который управляет дисплеем 520 для отображения результатов обработки, производимой процессором 504. Например, дисплей 520 может отображать временные и/или частотные спектры полученных сейсмических измерений, а также временные и/или частотные спектры измерений после осуществления многоканального квантования, фильтрации по углам наклона, фильтрации по скорости и т.д. Дополнительно, согласно фиг.10, система обработки 500 может включать в себя интерфейсы для связи с другими компьютерами и/или системами обработки, например, картой сетевого адаптера (NIC) 524, которая подключена к сети 526.
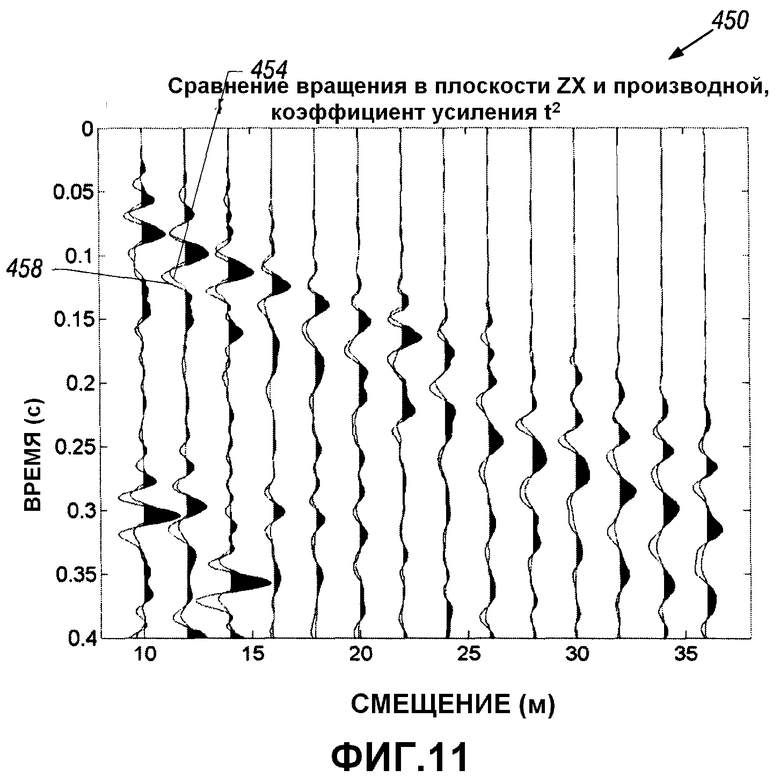
Полевые испытания сравнительно малого масштаба производили с использованием датчика вращения Eentec R1 с расширенной полосой 50 герц (Гц). Датчик вращения и два окружающих геофоны вертикальной составляющей были установлены на поверхности. Взрывная линия волнового поля была получена с разнесением между источниками в 2 метра (м). Для этого испытания использовали источник в виде вертикального молота, который ударял по металлической плите, лежащей на земле. Данные скорости вращения, которая пропорциональна пространственному градиенту волнового поля, сравнивали с продольным градиентом вертикальной составляющей волнового поля скоростей, полученным дифференцированием пары геофонов вертикальной составляющей. Данные геофонов и вращения корректировали в отношении их соответствующих характеристик.
Результаты показаны на фиг.11 в виде графика 450. Согласно фиг.11, сравнение измеренного (с помощью датчика вращения) пространственного градиента 458 и расчетного продольного градиента 454 демонстрирует хорошее согласование между двумя массивами данных, например, хорошее согласование между временами прихода и формами волны.
Другие варианты осуществления предусмотрены в пределах объема формулы изобретения. Например, в соответствии с другими вариантами осуществления изобретения, движение частиц и данные вращения можно обрабатывать для получения информации о волновом поле помимо интерполированных значений для волнового поля в местах расположения сенсорных блоков. Например, в соответствии с некоторыми вариантами осуществления изобретения, данные датчиков вращения можно использовать для ослабления поверхностной волны. Датчик вращения может быть менее чувствителен по амплитуде и/или частоте или может иметь, в общем случае, более высокий уровень шума, чем датчик вращения, используемый в приложении интерполяции. Для этого приложения, датчик вращения регистрирует, в основном, заметные события, и поверхностная волна преобладает над данными. Данные скорости вращения можно объединять с данными движения частиц для ослабления поверхностной волны, как описано ниже.
В соответствии с некоторыми вариантами осуществления изобретения, данные скорости вращения сначала объединяются с данными движения частиц для интерполяции данных движения частиц в положениях, где сенсорные блоки отсутствуют, например посередине каждого набора сенсорных блоков. Традиционно, данные движения частиц регистрируются с интервалом пространственного квантования, вдвое превышающим пространственное волновое число Найквиста, по сравнению с этим приложением, в котором интерполированный массив данных квантуется с однократным пространственным волновым числом Найквиста. Интерполированный массив данных содержит измеренные данные движения частиц с более слабыми отражениями и интерполированные данные движения частиц без более слабых отражений. Затем можно применять способ ослабления поверхностной волны, например способ фильтрации по частоте/волновому числу (в порядке неограничительного примера), описанный в статье Oz Yilmaz, Seismic Data Analysis: Processing, Inversion and Interpretation of Seismic Data, Society of Exploration Geophysicists (2001).
В порядке другого неограничительного примера, можно использовать способ ослабления поверхностной волны, описанный в статье Anderson, B., P., Van Baaren, M. Daly, W. Grace, J. Quigley and D. Sweeney, Point-Receiver Seismic Data Offers New Approach to Managing Onshore, E&P Development Cycle, First Break, 24, no.2, 63-70 (2006). После фильтрации, остается лишь подмножество фильтрованных измеренных траекторий движения частиц, поскольку фильтрованные интерполированные траектории содержат более слабые отражения и, таким образом, отбрасываются. Поскольку это приложение призвано удалять шум поверхностной волны и другие шумовые моды только с волновыми числами между однократным и двукратным пространственным волновым числом Найквиста, можно использовать датчик вращения, имеющий ограниченные чувствительность и полосу частот.
В соответствии с другими вариантами осуществления изобретения, поверхностную волну можно ослаблять без первоначальной интерполяции. Одна проблема, связанная с поверхностной волной, состоит в том, что ее низкая скорость требует, в общем случае, плотного расположения датчиков движения частиц в продольном направлении, а также, зачастую, в поперечном направлении. В отсутствие надлежащего пространственного квантования волнового поля, искажения могут создавать препятствия для выполнения многих алгоритмов обработки данных. В общем случае, искажения возникают, когда производится менее двух измерений наиболее медленной длины волны, представляющей интерес. Ниже описан противоискажательный фильтр, который удаляет искаженную часть волнового поля, которая, во многих случаях, является сравнительно более медленной поверхностной волной. Благодаря использованию противоискажательного фильтра, можно увеличить разнесение сенсорных блоков, в результате чего поверхностная волна намеренно искажается, а отраженный сигнал нет.
Данные вертикальной составляющей движения частиц (обозначенные здесь "V(x,y,t)") измеряются в позиции (x,y) и в момент времени t. Один или несколько датчиков вращения на каждом сейсмическом сенсорном блоке обеспечивают продольный градиент (обозначенный здесь "Gx(x,y,t)") и/или поперечный градиент (обозначенный здесь "Gy(x,y,t)") вертикального волнового поля. Волновое поле, измеренное на поверхности, можно описать следующим образом:
 , Ур.2
, Ур.2
 , и Ур.3
, и Ур.3
 . Ур.4
. Ур.4
В многообразии частота/волновое число, искаженная энергия, волновые числа которой превышают пространственное волновое число k n, окружает и проецируется на неискаженные частоты/волновые числа. Амплитуду в расчетном спектре частот/волновых чисел (f-k) можно описать следующим образом:
 , Ур.5
, Ур.5
 , и Ур.6
, и Ур.6
 , Ур.7
, Ур.7
где "A ua" обозначает амплитуду неискаженного волнового поля; "A alx" обозначает амплитуду продольных искаженных волновых полей; и "A aly" обозначает амплитуду поперечного искаженного волнового поля.
Амплитуды неискаженной части спектра f-k можно описать следующим образом:
 , и Ур.8
, и Ур.8
 . Ур.9
. Ур.9
Аналогично, амплитуды искаженной части спектра f-k можно описать следующим образом:
 , и Ур.10
, и Ур.10
 . Ур.11
. Ур.11
Таким образом, согласно фиг.12, в соответствии с вариантом осуществления изобретения, способ 600 можно применять для получения неискаженного волнового поля вертикального движения частиц. Согласно способу 600, данные, соответствующие данным вертикального движения частиц и данным продольного и/или поперечного вращения, принимаются на этапе 604. Эти данные затем преобразуются, на этапе 608, в многообразии частота/kx. Затем противоискажательный фильтр применяется в направлении x (этап 612) и в направлении y (этап 620). После фильтрации на этапах 612 и 620, фильтрованные данные преобразуются, на этапах 616 и 624 обратно в пространственно-временное многообразие.
В соответствии с другими вариантами осуществления изобретения, данные скорости вращения также можно использовать для разделения волнового поля. В частности, данные скорости вращения можно использовать для разделения волновых мод сжатия (P) и сдвига (S) на свободной поверхности, что описано в статье Robertsson, J.O.A., and A. Curtis, Wavefield Separation Using Densely Deployed Three-Component Single-Sensor Groups in Land Surface-Seismic Recordings, 1624-1633, Geophysics, Vol. 67 (2002). Волновое поле сжатия P на свободной поверхности задается дивергенцией волнового поля в виде
 , Ур.12
, Ур.12
где "λ" и "μ" - параметры Ламе. Эту величину можно измерять с помощью датчика давления, что изложено в патентной заявке Великобритании № 0800376.6, под названием "ACOUSTIC LAND SEISMIC SENSOR" (номер в реестре патентного поверенного 57.0708), поданной 10 января 2008 г. и, таким образом, включенной сюда в порядке ссылки в полном объеме. Альтернативно, величину можно измерять путем пространственного дифференцирования измерений движения частиц, что описано в статье Robertsson, J.O.A., and E. Muyzert, Wavefield Separation Using A Volume Distribution of Three Component Recordings, Geoph. Res. Lett, 26, 2821-2824 (1999). Сдвиговая часть S волны, полученная разделением волнового поля, включает в себя три составляющие, описывающие ротор волнового поля в виде
 , Ур. 13
, Ур. 13
 , и Ур. 14
, и Ур. 14
 . Ур. 15
. Ур. 15
Величины в Ур.13-15 можно непосредственно измерять трехкомпонентным датчиком скорости вращения, расположенным на свободной поверхности. Альтернативно, способ можно использовать для вертикального разделения волнового поля с использованием измеренных скорости вращения и трехкомпонентных скоростей, что описано в Geophysics 67 на 1624-1633 (в частности, Ур.28-36).
В других вариантах осуществления изобретения, описанные здесь способы и системы можно применять для ослабления атмосферной волны. В общем случае, атмосферная волна является акустическим шумом, генерируемым сейсмическим источником, распространяющимся со скоростью около 330 м/с и имеющим частоты свыше 100 Гц. В частности, атмосферную волну можно ослаблять с использованием способа, например вышеописанного способа, ослабления поверхностной волны с использованием противоискажательного фильтра. Важное различие между ослаблением атмосферной волны и ослаблением поверхностной волны состоит в том, что атмосферная волна имеет меньшую длину волны и поэтому часто искажается в традиционных разведочных работах. Таким образом, в сейсморазведочных работах с использованием блоков, где объединены датчики движения частиц и скорости вращения, может потребоваться разнесение блоков, аналогичное традиционным разведочным работам, а не более редкое разнесение, которое в противном случае может использоваться для ослабления поверхностной волны. Однако по-прежнему можно использовать только один сенсорный блок на наиболее медленную длину волны вместо двух, но наиболее медленная длина волны теперь является атмосферной волной более высокой частоты, а не поверхностной волной более низкой частоты.
В соответствии с некоторыми вариантами осуществления изобретения, можно использовать сейсмический сенсорный блок 700, показанный на фиг.13. Сейсмический сенсорный блок 700 содержит геофон и, по меньшей мере, один датчик вращения. Сейсмический сенсорный блок 700 имеет кожух, который включает в себя опорную плиту 704, слегка изогнутую для стабилизации блока 700 и, в общем случае, повышения сейсмической связи датчиков блока с измеряемыми волновым полем и поверхностной волной. На фиг.13 также показаны кабельные разъемы 712 и 716. Единичный штырь может проходить или не проходить через опорную плиту 704 в земную поверхность, в зависимости от конкретного варианта осуществления изобретения.
В другой вариации, три штыря могут проходить из сейсмического сенсорного блока в землю для стабилизации блока и, в общем случае, повышения сейсмической связи датчиков блока с измеряемыми волновым полем и поверхностной волной. Другие конфигурации предусмотрены в пределах объема формулы изобретения.
Заметим, что систему обработки 400 можно использовать для обработки собранных данных движения частиц и скорости вращения для осуществления вышеописанного ослабления поверхностной волны, ослабления атмосферной волны, разделения на P и S волны, разделение волнового поля на восходящее и нисходящее, и т.д. Таким образом, обработка 400 может сохранять соответствующие массивы данных и программные инструкции для осуществления, по меньшей мере, частично, одного или нескольких из этих способов для получения изображения геологической среды.
Хотя настоящее изобретение описано в отношении ограниченного количества вариантов осуществления, специалисты в данной области техники, на основе этого раскрытия, могут предложить многочисленные модификации и вариации. Нижеследующая формула изобретения призвана охватывать все такие модификации и вариации, которые не выходят за рамки сущности и объема настоящего изобретения.
Изобретение относится к области геофизики и может быть использовано при проведении сейсморазведочных работ. Предложен способ сейсмических исследований, а также устройство и система для его осуществления. Способ предполагает возможность приема данных движения частиц и скорости вращения. Данные скорости движения частиц используются для получения характеристик волнового поля, а данные скорости вращения предназначены для отображения характеристик градиента волнового поля. Устройство включает в себя расстановку сейсмических сенсорных блоков, которые выполнены с возможностью осуществления измерений в связи с сейсмической разведкой, производимой на поверхности. Каждый сейсмический сенсорный блок включает в себя датчик движения частиц и датчик вращения. По найденным значениям характеристик волнового поля и градиента волнового поля строится изображение исследуемой геологической среды. Технический результат - повышение точности разведочных данных. 4 н. и 14 з.п. ф-лы, 13 ил.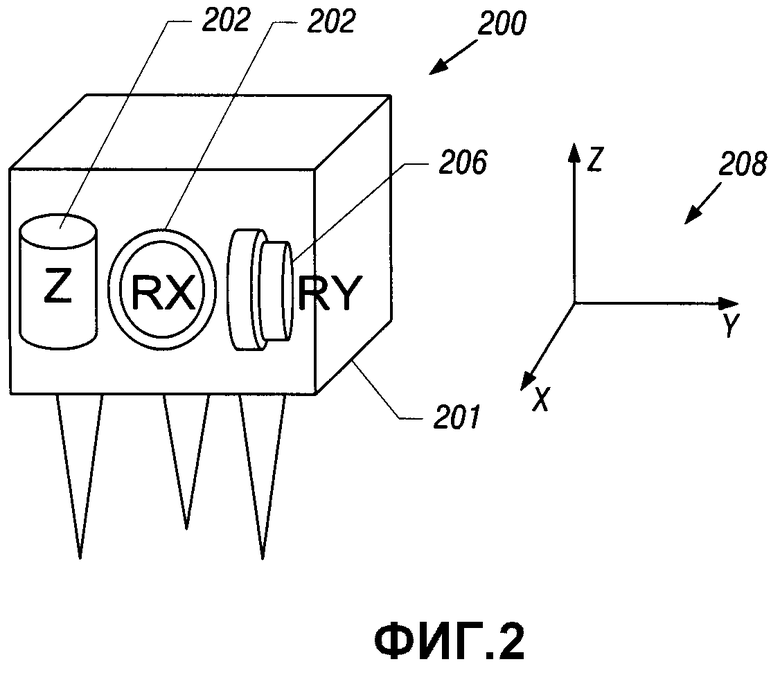
1. Способ сейсмического исследования, содержащий этапы, на которых:
принимают данные движения частиц, полученные во время измерений датчиками движения частиц расстановки датчиков движения частиц и данные скорости вращения, полученные во время измерений датчиками скорости вращения расстановки датчиков скорости вращения, и
получают характеристики волнового поля на основе, по меньшей мере, частично данных движения частиц;
получают характеристики градиента волнового поля на основе, по меньшей мере, частично данных скорости вращения, и
с помощью основанной на процессоре машине обрабатывают данные движения частиц и данные скорости вращения на основе, по меньшей мере, частично характеристик волнового поля и характеристик градиента волнового поля для построения изображения геологической среды.
2. Способ по п.1, в котором обработка содержит ослабление по меньшей мере одного из поверхностной волны и атмосферной волны.
3. Способ по п.1, в котором обработка содержит интерполяцию волнового поля в местоположениях, отличных от местоположений, в которых были получены данные движения частиц и данные скорости вращения.
4. Способ по п.1, в котором обработка содержит применение фильтра сглаживания искажений.
5. Способ по п.1, в котором обработка содержит разделение волновых полей сжатия и сдвига.
6. Система для сейсмического исследования, содержащая
интерфейс для приема данных движения частиц, полученных во время измерений датчиками движения частиц расстановки датчиков движения частиц, и данных скорости вращения, полученных во время измерений датчиками скорости вращения расстановки датчиков скорости вращения, и
процессор для
получения характеристик волнового поля на основе, по меньшей мере, частично данных движения частиц;
получения характеристик градиента волнового поля на основе, по меньшей мере, частично данных скорости вращения, и
обработки данных движения частиц и данных скорости вращения на основе, по меньшей мере, частично характеристик волнового поля и характеристик градиента волнового поля для построения изображения геологической среды.
7. Система по п.6, в которой процессор обеспечивает ослабление по меньшей мере одного из поверхностной волны и атмосферной волны.
8. Система по п.7, в которой процессор обеспечивает интерполяцию волнового поля в местоположениях, отличных от местоположений, в которых были получены данные движения частиц и скорости вращения.
9. Система по п.7, в которой процессор обеспечивает применение фильтра сглаживания искажений.
10. Система по п.6, в которой процессор использует данные движения частиц и данные скорости вращения для разделения волновых полей сжатия и сдвига.
11. Способ сейсмического исследования, содержащий этапы на которых:
используют расстановку, содержащую блоки датчиков для получения данных движения частиц и данных скорости вращения, причем каждый из блоков датчиков содержит датчик движения частиц и датчик вращения и, по меньшей мере, часть расстановки имеет разнесение сетки для блоков датчиков большее, чем минимально необходимое разнесение сетки между датчиками движения частиц для непрерывной интерполяции волнового поля; и
обработку данных движения частиц и данных скорости вращения с помощью машины для выполнения непрерывной интерполяции волнового поля.
12. Способ по п.11, в котором на этапе использования используют расстановку вблизи препятствия, причем способ дополнительно содержит:
использование блоков датчиков для получения данных движения частиц и данных скорости вращения вблизи препятствия и использование дополнительных блоков датчиков расстановки, содержащих датчики движения частиц и не содержащих датчики вращения для получения дополнительных данных движения частиц.
13. Способ по п.12, дополнительно содержащий использование разнесения сетки для дополнительных блоков датчиков большего, чем разнесение сетки для блоков датчиков, содержащих датчики движения частиц и датчики скорости вращения.
14. Способ по п.11, в котором разнесение сетки представляет собой равномерное и неравномерное разнесение.
15. Способ по п.11, в котором непрерывная интерполяция волнового поля содержит интерполяцию движения частиц.
16. Устройство для сейсмического исследования, содержащее:
расстановку датчиков, содержащую первый набор блоков датчиков, имеющий первое разнесение сетки, и второй набор блоков датчиков, имеющий второе разнесение сетки большее, чем первое разнесение сетки; причем
блоки датчиков первого набора блоков датчиков содержат датчики движения частиц и датчики скорости вращения;
по меньшей мере один из датчиков скорости вращения, выполненный с возможностью прямого измерения скорости вращения датчика скорости вращения, и
блоки датчиков второго набора блоков датчиков содержат датчики движения частиц и не содержат датчики скорости вращения.
17. Устройство по п.16, в котором расстановка датчиков выполнена с возможностью охвата области исследования, содержащей препятствие, причем расстановка датчиков выполнена с возможностью использования второго разнесения сетки для компенсации влияния препятствия и расстановка датчиков выполнена с возможностью получения сейсмических данных, из которых волновое поле может быть пространственно интерполировано по области, которая включает в себя второй набор блоков датчиков.
18. Устройство по п.16, в котором разнесение сетки представляет собой равномерное и неравномерное разнесение.
| US 2004257913 A1, 23.12.2004, | |||
| АВТОНОМНАЯ ДОННАЯ СЕЙСМИЧЕСКАЯ СТАНЦИЯ (АДСС "ЛАРГЕ") | 2003 |
|
RU2229146C1 |
| US 20060245300 A1, 02.11.2006, | |||
| Устройство для перевода стрелок с движущейся повозки | 1930 |
|
SU28923A1 |
| Электронная игра | 1988 |
|
SU1674888A1 |
| US 6932185 B2 , 23.08.2005, | |||
| US 2008275649 A1, 06.11.2008, | |||
| US 5723790 A1 , 03.03.1998 | |||

