ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Сейсморазведка используется для идентификации представляющих интерес подземных элементов, таких как резервуары углеводородов, пресноводные водоносные пласты, зоны нагнетания газа и т.д. В сейсморазведке сейсмические источники активируют для генерирования сейсмических волн, направленных в подземную структуру.
[0002] Сейсмические волны, генерируемые сейсмическим источником, проходят в подземную структуру, при этом часть сейсмических волн отражается обратно к поверхности для приема сейсмическими датчиками (например, геофонами, акселерометрами и т.д.). Эти сейсмические датчики производят сигналы, которые представляют детектированные сейсмические волны. Сигналы от сейсмических датчиков обрабатываются для получения информации о содержании и характеристиках подземной структуры.
[0003] Наземная сейсморазведочная расстановка может включать в себя развертывание матрицы сейсмических датчиков на грунте. Морская сейсморазведочная расстановка может включать в себя размещение донного кабеля или другую расстановку сейсмических датчиков на морском дне.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
[0004] Данные поступательного движения в первом направлении измеряются датчиками движения частиц, содержащимися в удлиненном корпусе устройства датчика, расположенного на земной поверхности. Датчики движения частиц разнесены друг от друга вдоль второго, отличного направления по продольной оси удлиненного корпуса. Данные вращательного движения вокруг третьего направления вычисляется на основе, по меньшей мере частично, вычисления градиента данных поступательного движения по отношению ко второму направлению.
[0005] Другие признаки будут очевидны из нижеследующего описания, чертежей и из формулы изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0006] Некоторые варианты осуществления изобретения описаны в отношении следующих чертежей.
[0007] На фиг. 1 показан схематический вид устройства датчика в соответствии с некоторыми реализациями.
[0008] На фиг. 2A-2C показаны схематические виды устройства датчика в соответствии с различными реализациями.
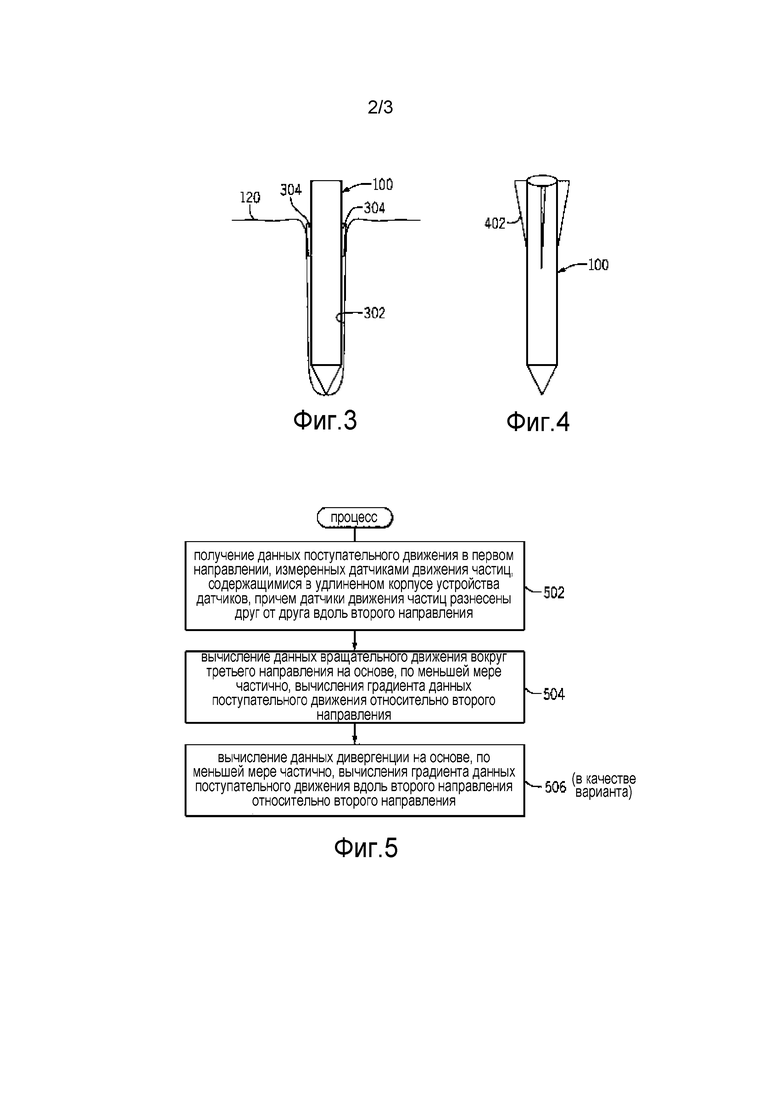
[0009] На фиг. 3 показан схематический вид устройства датчика, частично заглубленного в отверстии, в соответствии с некоторыми реализациями.
[0010] На фиг.4 показан схематический вид устройства датчика в соответствии с дополнительными реализациями.
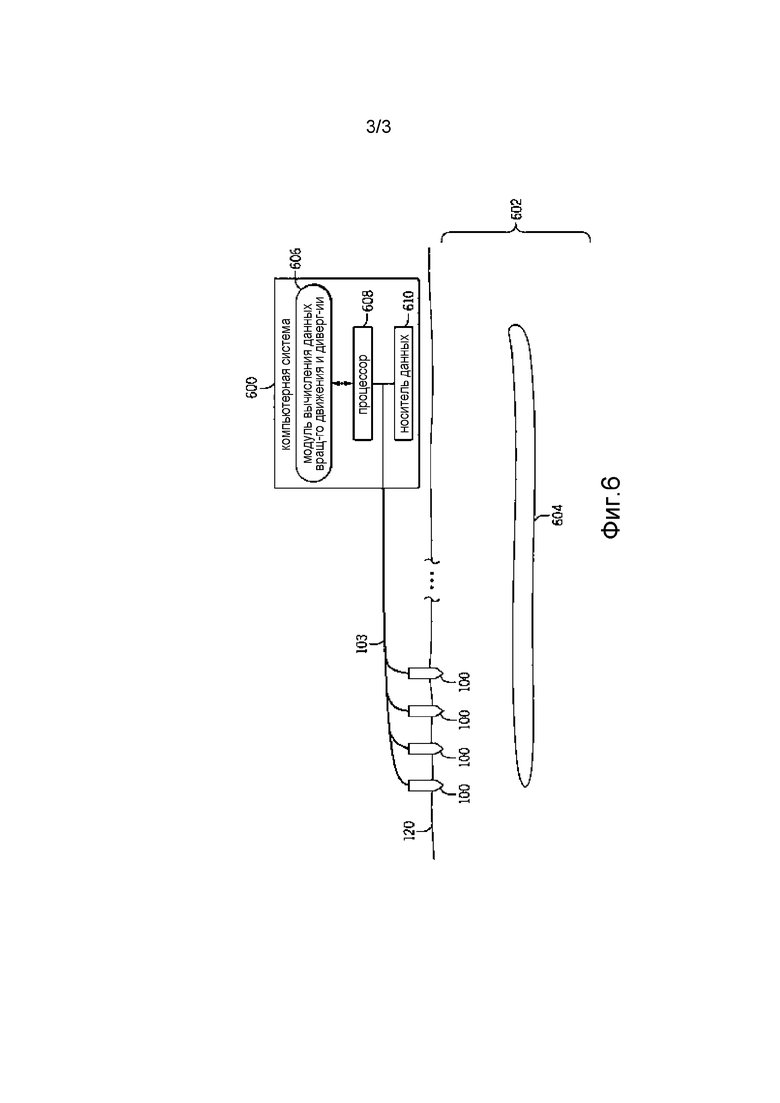
[0011] На фиг. 5 показана блок-схема процесса в соответствии с некоторыми реализациями.
[0012] На фиг. 6 показан схематический вид примерной разведочной расстановки, содержащей устройства датчика в соответствии с некоторыми реализациями.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0013] В сейсморазведке (морской или наземной сейсморазведке) используются сейсмические датчики для измерения сейсмических данных, таких как смещение, скорость или ускорение. Сейсмические датчики могут представлять собой геофоны, акселерометры, датчики на основе микроэлектромеханических систем (MEMS) или датчики любого другого типа, измеряющие поступательное движение поверхности в одном или более направлениях. В нижеследующем описании сейсмический датчик, который измеряет поступательное движение, называется датчиком движения частиц. Датчик движения частиц может относиться к любому из перечисленных выше датчиков.
[0014] Расстановка датчиков движения частиц может иметься на (или вблизи) поверхности грунта или земной поверхности для измерения сейсмических волн, отраженных от подземной структуры в ответ на сейсмические волны (или импульсы), произведенные одним или более сейсмических источников и распространяющиеся в подземной среде. Как описано в данном документе, поверхность грунта и/или земная поверхность представляет собой любую поверхность суши или поверхность дна водоема, например, морского дна, дна озера или болотистые места. Расположенный на поверхности грунта датчик движения частиц может относиться к датчику движения частиц, который находится в контакте с поверхностью грунта, частично заглублен на поверхности грунта или полностью заглублен на поверхности грунта до заданной глубины (например, до глубины менее 5 метров). Датчик движения частиц на (или вблизи) земной поверхности может записывать векторную часть упругого волнового поля только под свободной поверхностью (т.е. поверхностью грунта).
[0015] В дополнение к измерению данных поступательного движения может оказаться полезным получение данных вращательного движения при выполнении сбора данных разведки для различных целей. Например, данные вращательного движения могут быть скомбинированы с данными поступательного движения, измеренными датчиками движения частиц, для устранения или подавления шума в измеренных данных поступательного движения. Примеры шума включают в себя шум поверхностных волн или шум другого типа (например, шум окружающей среды), которые могут распространяться по земной поверхности. Шум поверхностных волн может быть произведен сейсмическим источником или другим источником, например, автомобилями, двигателями, насосами и природными явлениями, такими как ветер и океанские волны. Шум поверхностных волн перемещается в целом горизонтально по земной поверхности по направлению к сейсмическим приемникам. Горизонтально перемещающиеся сейсмические волны, такие как волны Рэлея или Лява, являются нежелательными компонентами, которые могут засорять данные сейсморазведки.
[0016] Хотя рассматривается использование данных вращательного движения для подавления шума, следует отметить, что данные вращательного движения могут быть использованы для других целей, будь то в контексте наблюдений наземной разведки или наблюдений морской разведки, при которой на морском дне размещается донный кабель или другая расстановка сейсмических датчиков. Например, данные вращательного движения и данные поступательного движения могут использоваться при выполнении различных алгоритмов обработки сейсмических данных, в том числе, среди прочего, интерполяции волнового поля, экстраполяции волнового поля, восстановления волнового поля, регуляризации волнового поля, разделения продольных волн (Р-волн) и поперечных волн (S-волн), оценки кажущейся скорости, характеристики приповерхностных условий, калибровки сейсмического датчика и построения сейсмических изображений.
[0017] Интерполяция волнового поля относится к оценке (интерполяции) волновых полей в местах, где сейсмические датчики не расположены. Разделение P- и S-волн относится к отделению продольных волн (P) от поперечных волн (S) в измеренных данных сейсморазведки. Оценка кажущейся скорости относится к оценке характеристики сейсмического волнового поля, известной в качестве лучевого параметра или горизонтального интервального времени пробега, из которых могут быть восстановлены скорости сейсмических волн в различных точках в подземной структуре. Характеристика приповерхностных условий относится к оценке упругих свойств на небольшой глубине. Калибровка сейсмического датчика относится к выполнению калибровки сейсмического датчика с целью корректировки любой неидеальной характеристики сейсмического датчика.
[0018] Данные вращательного движения относятся к скорости вращательного движения (или к изменению вращательного движения с течением времени) вокруг конкретной оси, например, вокруг оси х (которая также может называться горизонтальной продольной осью) и/или вокруг оси у (которая также может называться горизонтальной поперечной осью). В соответствии с некоторыми реализациями данные вращательного движения могут быть получены на основе данных поступательного движения, измеренных датчиками движения частиц. Таким образом, в геодезическом оборудовании с целью измерения данных вращательного движения не должен иметься отдельный датчик вращательного движения.
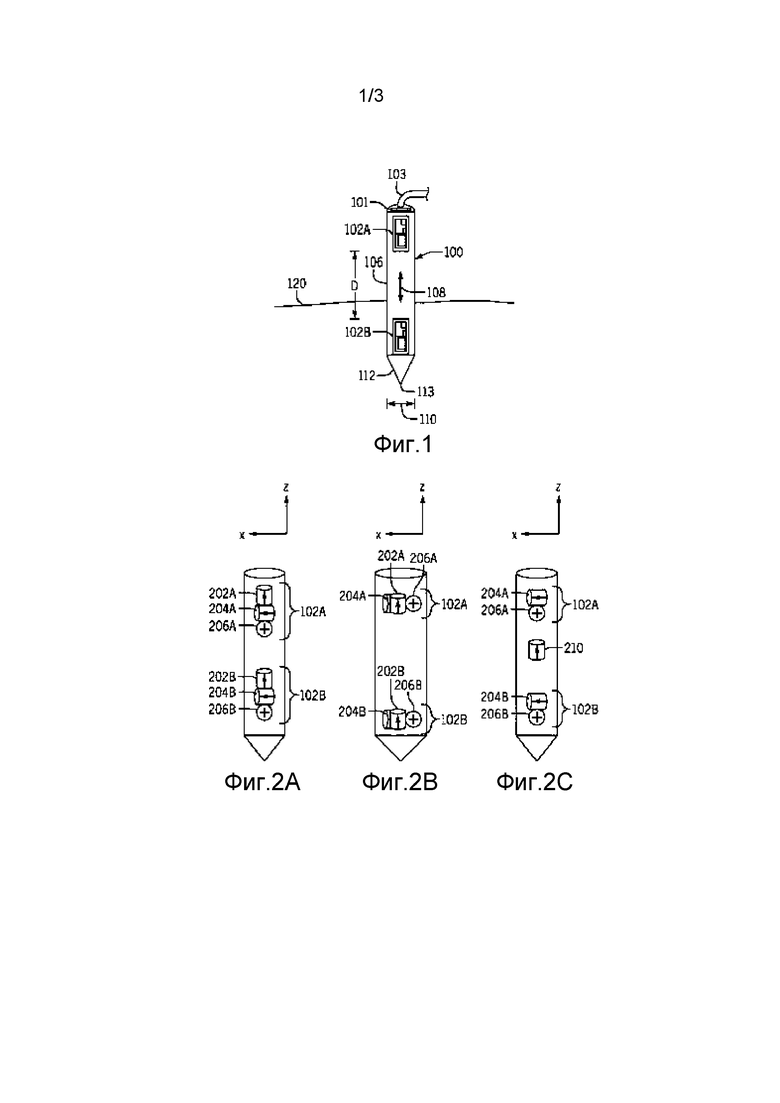
[0019] Фиг. 1 изображает примерное устройство 100 сейсмического датчика, которое включает в себя первый компонент 102A датчика и второй компонент 102B датчика. Компоненты 102А и 102В датчика помещены в одном корпусе 106 устройства 100 датчика. Устройство 100 сейсмического датчика также может включать в себя источник питания, например, аккумулятор, солнечный элемент и т.д. При изготовлении устройства 100 сейсмического датчика корпус 106 может быть герметизирован с целью защиты компонентов 102А и 102В датчика.
[0020] Корпус 106 в целом имеет удлиненную форму, которая обеспечивает возможность разнесения на расстояние D друг от друга компонентов 102A и 102B датчика по продольной оси 108 устройства 100 сейсмического датчика. В некоторых реализациях компоненты 102А и 102В датчика коаксиальны по продольной оси корпуса 106. Удлиненный корпус 106 может быть выполнен в форме полой трубки, стержня или другой удлиненной конструкции. Продольная ось 108 является осью вдоль размера устройства 100 датчика, более длинного, чем другие размеры устройства 100 датчика, такие как размер 110 по ширине или размер по глубине (не показан), который соответствует толщине корпуса 106.
[0021] Устройство 100 датчика, имеющее удлиненный корпус 106, может называться устройством датчика в форме шипа.
[0022] Корпус 106 может быть выполнен из материала, такого как пластик, металл и т.д. В соответствии с примерным вариантом осуществления изобретения корпус 106 может не резонировать в полосе частот, представляющих интерес для измеряемых целевых сигналов. В некоторых примерах ширина полосы частот, представляющих интерес, может находиться в диапазоне от 1 до 250 Герц (Гц). В других примерах корпус 106 может демонстрировать резонанс. В этих примерах резонанс может быть устранен путем обработки или резонанс может быть компенсирован путем обработки.
[0023] Посредством расположения компонентов 102А и 102В датчика в удлиненном корпусе 106, как показано на фиг. 1, компоненты 102А и 102В датчика разнесены друг от друга вдоль только продольной оси 108. Другими словами, в некоторых реализациях устройство 100 датчика не содержит компонентов датчика, которые разнесены друг от друга в любом другом направлении (кроме направления, параллельного продольной оси).
[0024] На фиг. 1 показана часть устройства 100 датчика (не в масштабе), находящаяся под поверхностью 120 грунта, и часть устройства 100 датчика, находящаяся над поверхностью 120 грунта. В соответствии с вариантом осуществления изобретения эта конфигурация может включать в себя датчик 102B под поверхностью грунта и датчик 102A над поверхностью грунта. Датчик также может быть установлен на или вблизи поверхности 120 грунта. В соответствии с вариантом осуществления изобретения большая часть устройства 100 датчика может быть под поверхностью 120 грунта. Согласно другому варианту осуществления изобретения большая часть устройства 100 датчика может быть над поверхностью 120 грунта. В другом варианте осуществления изобретения приблизительно половина устройства 100 датчика может быть над и половина устройства 100 датчика под поверхностью 120 грунта. В другом варианте осуществления изобретения все устройства 100 датчика (или по существу все устройства 100 датчика) могут быть под поверхностью 120 грунта.
[0025] В некоторых примерах для получения данных вращательного движения по отношению к горизонтальной оси на поверхности 120 грунта в устройстве 100 датчика могут иметься два датчика движения частиц, разнесенных друг от друга вертикально и ориентированных горизонтально. В этом случае устройство 100 датчика может быть расположено вертикально на или вблизи поверхности 120 грунта. Следует понимать, что по длине устройства 100 датчика могут быть расположены дополнительные датчики 102А и 102В для обеспечения резервирования при сбое датчиков и/или для дополнительных измерений.
[0026] Устройство 100 датчика может включать в себя цепь 101 коммуникационного интерфейса, которая соединена с коммуникационной средой 103 (например, электрический кабель, оптоволоконный кабель и т.д.). Коммуникационная среда 103 может представлять собой среду беспроводной связи, через которую могут передаваться данные. Цепь 101 коммуникационного интерфейса соединена с компонентами 102А и 102В датчика. Данные, полученные компонентами 102А и 102В датчика, передаются на цепь 101 коммуникационного интерфейса, которая, в свою очередь, передает полученные данные через коммуникационную среду 103 на удаленную станцию, которая может быть регистрирующей станцией, компьютером и т.д. В соответствии с другими вариантами осуществления изобретения, в устройстве 100 датчика может иметься и может быть встроено запоминающее устройство. Запоминающее устройство также может быть отдельным от устройства 100 датчика и соединено посредством кабеля или беспроводным способом с коротким диапазоном, например, Wi-Fi или Bluetooth. Конфигурация, в которой содержится запоминающее устройство, может называться в коммерческой технике конфигурацией «слепых» узлов. В этой конфигурации «слепых» узлов не обязательно должна иметься цепь 101 коммуникационного интерфейса. Следует также понимать, что может использоваться комбинация конфигурации «слепых» узлов и конфигурации кабельных узлов и/или беспроводных узлов.
[0027] В других реализациях устройство 100 датчика может содержать сенсорный элемент (или сенсорные элементы) для измерения наклона и/или азимута устройства 100 датчика, причем наклон измеряется по отношению к оси z. Этот сенсорный элемент(ы) может (могут) быть частью компонентов 102А и 102В датчика, которые измеряют поступательное движение и вращательное движение. Например, если компоненты 102А и 102В датчика включают в себя акселерометры на основе MEMS, которые измеряют вплоть до постоянного тока (DC), то акселерометры на основе MEMS могут обеспечивать данные наклона. Если компоненты 102А и 102В датчика включает в себя геофоны, то может быть добавлен инклинометр. Может быть добавлен датчик азимута (например, магнитометр, компас), так чтобы измеренные горизонтальные компоненты (например, данные поступательного движения или данные вращательного движения по осям x и y) могли быть повернуты по отношению к глобальной системе координат. Если датчик азимута не предусмотрен, то устройство 100 датчика может быть ориентировано по азимуту по заданному азимуту, когда устройство 100 датчика установлено.
[0028] Кроме того, в устройстве 100 датчика может содержаться цепь управления (не показана) для управления датчиками движения частиц. Дополнительно, например, в цепи 101 коммуникационного интерфейса могут содержаться аналого-цифровой преобразователь и другие компоненты для преобразования сигналов, измеренных датчиками движения частиц, в цифровую форму. Компоненты устройства 100 датчика могут питаться от аккумулятора, солнечной панели или через кабельное или беспроводное соединение.
[0029] Нижняя часть устройства 100 датчика может включать в себя шип 112 для введения устройства 100 датчика в поверхность 120 грунта. Шип 112 имеет в целом острый конец 113, который обеспечивает легкую вставку устройства 100 датчика в поверхность 120 грунта для формирования соединения между землей и устройством 100 датчика. Пользователь или машина может проталкивать шип 112 в поверхность 120 грунта, чтобы обеспечить заглубление по меньшей мере части устройства 100 датчика в земле под поверхностью 120 грунта. Например, устройство 100 датчика может вводиться в поверхность грунта с помощью молотка либо пользователем, либо в автоматическом режиме с помощью машины. В разных примерах устройство 100 датчика может быть ввернуто в грунт ключом или установлено в подготовленную скважину с уменьшенным возмущением окружающей земли. В качестве другого примера может быть выкопана скважина, в которой может быть установлено устройство 100 датчика. Скважина может быть заполнена после позиционирования устройства 100 датчика. Вместо использования шипа 112 корпус 106 устройства 100 датчика может иметь V-образную форму или форму винта для облегчения установки в поверхности 120 грунта (на внешней стенке корпуса 106 могут быть сформированы выступы в виде шнека).
[0030] В некоторых случаях устройство 100 датчика частично заглублено под поверхностью 120 грунта, при этом часть устройства 100 датчика выступает над поверхностью 120 грунта. В других случаях устройство 100 датчика может быть полностью заглублено в поверхности грунта до заданной глубины (как описано выше).
[0031] В некоторых примерах компоненты 102А и 102В датчика представляют собой чипы с датчиками. Под чипами с датчиками понимается устройство с интегральными схемами, которое включает в себя подложку (например, полупроводниковую подложку), на которой могут быть расположены датчики движения частиц. Например, датчики движения частиц, которые могут иметься в чипе 102А или 102B с датчиками, могут включать в себя датчики движения частиц на основе MEMS, такие как акселерометры на основе MEMS. Датчик движения частиц на основе MEMS может включать в себя микроэлемент (например, микрокантилевер), выполненный с возможностью перемещения в ответ на движение частиц, причем перемещение микроэлемента может быть детектировано с помощью сенсорного элемента. В других примерах компоненты 102А и 102В датчика могут включать в себя датчики движения частиц других типов. Следует отметить, что датчики движения частиц на основе MEMS не обязательно должны быть на «чипе», однако это представляет собой возможный вариант. Пример конфигурации на основе MEMS и электроники раскрыт в заявке на патент США № 2013/0315036.
[0032] В некоторых реализациях датчики движения частиц, которые имеются в компоненте 102А или 102В датчика, могут измерять данные поступательного движения в нескольких направлениях, таких как x, y и z. Примеры этих конфигураций показаны на фиг. 2А и 2В, где компонент 102А или 102В датчика включает в себя соответствующий датчик z 202A или 202B (для измерения данных поступательного движения по оси z), соответствующий датчик х 204а или 204B (для измерения данных поступательного движения по оси х) и соответствующий датчик у 206А или 206В (для измерения данных поступательного движения по оси у).
[0033] В других примерах, например, в показанных на фиг. 2C, компонент 102А или 102В датчика может включать в себя только соответствующий датчик x 204А или 204В и соответствующий датчик y 206 А или 206В. В конфигурации на фиг. 2C может иметься отдельный датчик z 210 для измерения данных поступательного движения вдоль направления z. Датчик z 210 может быть расположен посередине между компонентами 102А и 102В датчика. В других примерах датчик z 210 может быть расположен в другом месте, например, либо в 102A, либо в 102B. В некоторых реализациях пара датчиков (например, 204A и 204B, или 206A и 206B, или 202A и 202B) может быть неразъемно соединена, чтобы обеспечить сумму и разность в качестве выходных сигналов. Сумма может помочь уменьшить некоррелированный шум (между элементами пары), а разность обеспечивает градиент.
[0034] В других реализациях компонент 102А датчика может включать в себя датчики движения частиц для измерения только по осям х и у, в то время как компонент 102В датчика может включать в себя датчики движения частиц для измерения по осям x, y и z и наоборот.
[0035] Следует отметить, что датчики движения частиц в данном компоненте (например, 102А) в том же самом устройстве 100 датчика не обязательно должны быть ориентированы в том же направлении, что и другие компоненты датчика (например, 102В). Если относительный угол между компонентами 102A и 102B датчика известен, то данные, измеренные посредством пары датчиков движения частиц, могут быть скорректированы с использованием вектора вращательного движения.
[0036] Как показано на фиг. 3, вводящее воздействие на устройство 100 датчика (например, повторные ударные воздействия молотком на устройство 100 датчика) вводит устройство 100 датчика в отверстие 302, проходящее от поверхности 120 грунта. Вводящее воздействие на устройство 100 датчика может привести к расширению отверстия 302 вблизи земной поверхности 302. Расширение отверстия 302 вблизи земной поверхности 300 может вызвать резонанс в устройстве 100 датчика, который может наблюдаться в измеренных данных сейсморазведки. Эти резонансы могут быть уменьшены за счет повышения сцепление устройства 100 датчика с окружающим грунтом. Это может быть достигнуто путем вставки клиньев 304 в зазор между устройством 100 датчика и окружающим грунтом.
[0037] В других реализациях, как показано на фиг. 4, устройство 100 датчика может быть оснащено крыльями или ребрами 402 (например, вертикальными ребрами), который обеспечивают соединение верхней части устройства 100 датчика с окружающей землей, когда устройство 100 датчика введено в отверстие 302 (фиг. 3). В дополнительных вариантах осуществления изобретения может быть выкопано отверстие, при этом устройство 100 датчика позиционируется в отверстии и отверстие засыпается, чтобы обеспечить хорошее сцепление. В других реализациях сначала можно устанавливать или заглублять соединительное устройство, затем устройство 100 датчика может быть сцеплено с этим соединительным устройством.
[0038] Данные вращательного движения в трех пространственных осях (k = х, у, z) определяются по уравнению:
 (уравнение 1),
(уравнение 1),
где  представляет собой скорость частиц по оси i (i = х, у, z) и
представляет собой скорость частиц по оси i (i = х, у, z) и  представляет собой скорость частиц по оси j (j = x, y, z). В вышеуказанных обозначениях ось i ортогональна к оси j и обе оси i и j ортогональны к оси k. Градиент
представляет собой скорость частиц по оси j (j = x, y, z). В вышеуказанных обозначениях ось i ортогональна к оси j и обе оси i и j ортогональны к оси k. Градиент  представляет собой пространственную производную от по отношению к оси j, а градиент
представляет собой пространственную производную от по отношению к оси j, а градиент  представляет собой пространственную производную по отношению к оси i. Измерения скорости частиц могут быть сделаны на или только под поверхностью 120 грунта (фиг. 1). На или только под поверхностью 120 грунта могут применяться следующие соотношения для получения данных вращательного движения по оси х и у:
представляет собой пространственную производную по отношению к оси i. Измерения скорости частиц могут быть сделаны на или только под поверхностью 120 грунта (фиг. 1). На или только под поверхностью 120 грунта могут применяться следующие соотношения для получения данных вращательного движения по оси х и у:
 , (уравнение 2)
, (уравнение 2)
 , (уравнение 3),
, (уравнение 3),
где  представляет собой скорость частиц в направлении х,
представляет собой скорость частиц в направлении х,  представляет собой скорость частиц в направлении у и
представляет собой скорость частиц в направлении у и  представляет собой скорость частиц и направлении z. Это означает, что компоненты вращательного движения вокруг горизонтальной оси
представляет собой скорость частиц и направлении z. Это означает, что компоненты вращательного движения вокруг горизонтальной оси  или
или  могут быть получены путем измерения только одного из членов в правой части уравнения 2 или 3.
могут быть получены путем измерения только одного из членов в правой части уравнения 2 или 3.
[0039] Хотя в предыдущих примерах рассматривается получение данных вращательного движения на основе измеренных скоростей, следует отметить, что могут быть использованы данные поступательного движения других типов, включая данные смещения или ускорения, для получения данных вращательного движения аналогично тому, как описано выше в связи с уравнениями 2 и 3.
[0040] Характеристикой расположения устройства 100 датчика на поверхности 120 грунта (или на свободной поверхности между воздухом и твердым веществом или между водой и твердым веществом) является то, что пространственный градиент и вращательное движение становятся эквивалентными друг другу, как выражено уравнением 2 или 3.
[0041] С использованием этой характеристики, когда устройство датчика расположено на поверхности 120 грунта, измерения вертикального градиента данных горизонтального поступательного движения в шипообразном устройстве датчика могут быть использованы для получения данных вращательного движения. Вертикальный градиент относится к градиенту, взятому по отношению к оси z. Данные горизонтального поступательного движения относятся к данным поступательного движения по оси х или оси у. Вертикальный градиент данных горизонтального поступательного движения может быть представлен, например, как  или
или  .
.
[0042] В примерной расстановке на фиг. 1, вышеуказанные вертикальные градиенты данных горизонтального поступательного движения могут быть получены с использованием измерений близко разнесенных друг от друга датчиков х 204A и 204B или близко разнесенных друг от друга датчиков y 206а и 206b.
[0043] В дополнение к получению данных вращательного движения с помощью измерений данных поступательного движения с помощью датчиков движения частиц, также могут быть получены данные дивергенции с использованием данных поступательного движения в соответствии с дополнительными реализациями.
[0044] Дивергенция волнового поля  может быть представлена в виде:
может быть представлена в виде:
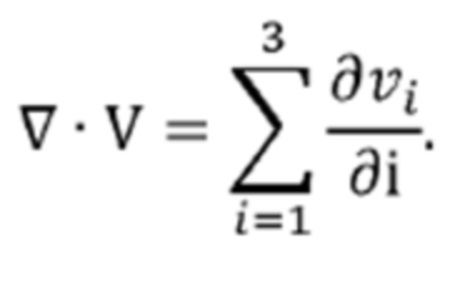 (уравнение 4)
(уравнение 4)
[0045] В уравнении 4, i = (х, у, z) представляют собой три ортогональные оси. На свободной поверхности уравнение 4 может быть представлено как:
 . (уравнение 5)
. (уравнение 5)
[0046] Уравнение 5 показывает, что на свободной поверхности дивергенция волнового поля может быть измерена только одним членом  частной производной. В уравнении 5 параметры μ и λ являются параметрами Ляме. Отношение параметров Ляме μ и λ является функцией приповерхностных скоростей α и β P- и S-волн:
частной производной. В уравнении 5 параметры μ и λ являются параметрами Ляме. Отношение параметров Ляме μ и λ является функцией приповерхностных скоростей α и β P- и S-волн:
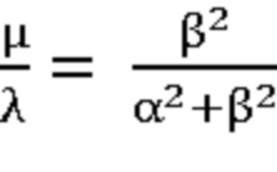 . (уравнение 6)
. (уравнение 6)
[0047] Частная производная в правой части уравнений 2, 3 и 5 может быть измерена путем дифференцирования измерений от близко разнесенных друг от друга датчиков движения частиц, таких как близко разнесенные друг от друга датчики движения частиц, изображенные на фиг. 1. В некоторых примерах, датчики движения частиц разнесены друг от друга по продольной оси 108 на расстояние D, меньшее или равное приблизительно 0,3 длины волны целевого сигнала с целью измерения устройством 100 датчика. В других примерах датчики движения частиц разнесены друг от друга по продольной оси 108 на расстояние D, меньшее или равное приблизительно 0,1 длины волны целевого сигнала с целью измерения устройством 100 датчика. Следует отметить, что вышеуказанные расстояния D между датчиками движения частиц применяются к вычислению данных вращательного движения по уравнениям 2 и 3 и/или данных дивергенции в соответствии с уравнением 5.
[0048] Для достижения большей точности при вычислении данных вращательного движения и/или данных дивергенции, как описано выше, на основе измеренных данных поступательного движения, датчики движения частиц выбраны или конфигурированы таким образом, чтобы импульсные характеристики датчиков движения частиц в пределах одного устройства 100 датчика были похожи друг на друга в пределах определенной пороговой разницы между друг другом. Это может быть достигнуто путем выбора согласованных пар датчиков движения частиц или путем применения коэффициентов калибровки для данных измерения, полученных датчиками движения частиц.
[0049] Фиг. 5 показывает блок-схему процесса в соответствии с некоторыми реализациями. Процесс на фиг. 5 может быть осуществлен с помощью компьютерной системы, которая получает измерения, сделанные одним или более устройств 100 датчика. Например, компьютерная система может быть соединена с одним или более устройств 100 датчика посредством коммуникационной среды 103.
[0050] Компьютерная система получает (на этапе 502) данные поступательного движения в первом направлении (например, в направлении х или у), измеренные датчиками движения частиц, содержащимися в удлиненном корпусе 106 (фиг. 1) устройства 100 датчика. Датчики движения частицы разнесены друг от друга во втором, отличном направлении (например, в направлении z) по продольной оси 108 (фиг. 1) удлиненного корпуса 106.
[0051] Компьютерная система вычисляет (на этапе 504) данные вращательного движения вокруг третьего направления (например, направления у или х) на основе, по меньшей мере частично, вычисления градиента данных поступательного движения по отношению ко второму направлению, например, в соответствии с описанным выше уравнением 2 или 3.
[0052] В некоторых примерах компьютерная система может также вычислять (на этапе 506) данные дивергенции на основе, по меньшей мере частично, вычисления градиента данных поступательного движения вдоль второго направления, по отношению ко второму направлению, например, в соответствии с описанным выше уравнением. 5.
[0053] Как показано на фиг. 2А или 2В, в некоторых реализациях устройство 100 датчика может включать в себя два набора (102а, 102В) трех ортогонально ориентированных датчиков движения частиц. Такая конфигурация обеспечивает возможность вычисления двух ортогональных компонентов и вращательного движения вокруг соответствующих горизонтальных осей х и у. Датчики движения частиц набора могут быть расположены с очень небольшим вертикальным интервалом внутри устройства 100 датчика (как описано выше). Расстояние между наборами датчиков движения частиц не обязательно должен быть таким же для разных направлений (например, направлений x и у), при условии, что разные расстояния известны.
[0054] При использовании устройства 100 датчика, показанного на фиг. 2А или 2В, могут быть получены следующие данные: данные поступательного движения (в том числе  ), данные вращательного движения (в том числе , ) и данные дивергенции (). С помощью устройства 100 датчика, показанного на фиг. 2C, могут быть получены данных тех же типов, за исключением данных дивергенции. Вышеуказанные данные могут быть переданы по коммуникационной среде 103 (фиг. 1) на станцию.
), данные вращательного движения (в том числе , ) и данные дивергенции (). С помощью устройства 100 датчика, показанного на фиг. 2C, могут быть получены данных тех же типов, за исключением данных дивергенции. Вышеуказанные данные могут быть переданы по коммуникационной среде 103 (фиг. 1) на станцию.
[0055] В некоторых примерах, с целью получения более точных оценок данных поступательного движения, могут быть объединены (например, суммированы, усреднены и т.д.) измерения данных поступательного движения в заданном направлении, полученные парой датчиков движения частиц для заданного направления. Например, как показано на фиг. 2А или 2В, измерения данных поступательного движения датчиками z 202A и 202B могут быть объединены с целью получения более точной оценки волнового поля в направлении z, причем эта оценка центрирована с той же глубиной, что и полученные данные вращательного движения и дивергенции. Аналогичным образом измерения данных поступательного движения датчиками х 204A и 204В могут быть объединены (в компьютерной системе) с целью получения более точной оценки волнового поля в направлении х, при этом измерения данных поступательного движения датчиками y 206А и 206В могут быть объединены (в компьютерной системе) с целью получения более точной оценки волнового поля в направлении у.
[0056] В некоторых примерах расстояние (D на фиг. 1) между наборами датчиков движения частиц в устройстве датчика находится в диапазоне от одного сантиметра до одного метра. Более конкретно, расстояние D может находиться в диапазоне от 5 сантиметров до 50 сантиметров, при этом возможны другие диапазоны, например, порядка сантиметров.
[0057] Амплитуда сигнала разности (разность между данными поступательного движения, полученными с помощью первого датчика движения частиц, и данными поступательного движения, полученными с помощью второго датчика движения частиц, вычисленная для определения частной производной в уравнениях 2, 3 или 5) может быть относительно небольшой по сравнению с чувствительностью датчика движения частиц вследствие относительно малого расстояния между двумя датчиками движения частиц. В соответствии с некоторыми реализациями, для обеспечения точного определения данных вращательного движения и/или данных дивергенции датчики движения частиц, используемые в парах, должны быть хорошо согласованы по фазо-частотной характеристике и амплитудо-частотной характеристике. В некоторых примерах датчики движения частиц на основе MEMS могут хорошо подходить для некоторых реализаций, так как они имеют нулевую (или близкую к нулевой) фазо-частотную характеристику, а их амплитудная характеристика является плоской на разных частотах.
[0058] Кроме того, датчики движения частиц на основе MEMS могут измерять силу тяжести, что может быть использовано для калибровки чувствительностей датчиков движения частиц на основе MEMS. В результате использование датчиков движения частиц на основе MEMS может привести к более точному вычислению частных производных данных поступательного движения, например производных, вычисляемых в уравнениях 2, 3 или 5.
[0059] Использование датчиков движения частиц на основе MEMS может также обеспечить меньший размер устройства 100 датчика по сравнению с устройством датчика, в котором используется датчики движения частиц другого типа, такие как геофоны. Устройство 100 датчика с меньшими размерами легче развернуть.
[0060] Для повышения точности данных дивергенции, полученных путем дифференцирования близко разнесенных друг от друга датчиков z движения частиц, например, в соответствии с уравнением 5, датчики z движения частиц (например, 202A и 202B на фиг. 2А или 2В) в одном и том же устройстве 100 датчика могут быть сейсмически разъединены. Сейсмическое разъединение датчиков z движения частиц может быть достигнуто путем размещения демпфера между этими двумя датчиками, например, путем размещения материала, например, резины или другого демпфирующего материала между датчиками, который служит для ослабления сейсмических сигналов, распространяющихся по продольной оси 108 (фиг. 1) устройства 100 датчика. Кроме того, для достижения улучшенной точности при получении данных дивергенции, пара датчиков z движения частиц в устройстве 100 датчика согласованы или откалиброваны таким образом, чтобы обеспечить практически идентичные амплитудные и фазо-частотные характеристики.
[0061] Как отмечалось выше, в некоторых реализациях устройство 100 датчика может включать в себя сенсорный элемент (например, инклинометр) для измерения наклона устройства 100 датчика по отношению к оси z (вертикальной оси). Отклонение от вертикальной оси может быть измерено в двух направлениях с помощью инклинометров или может быть получено из компоненты постоянного тока DC для измерений датчика движения частиц. Если устройство 100 датчика не ориентировано вертикально (т.е., его продольная ось 108 наклонена по отношению к оси z на угол, больший заданного угла), то измерения датчиками движения частиц устройства 100 датчика корректируются с учетом наклона.
[0062] Кроме того, ориентация горизонтальных датчиков (х или у) движений частиц по отношению к географическому северу (или любому другому горизонтальному азимуту) может быть измерена при помощи встроенного магнитометра или компаса, показания которых записываются и передаются один или более раз в течение разведки. В других примерах азимут может быть измерен во время или после установки устройства 100 датчика или получен из измеренных данных поступательного движения. Измеренные данные поступательного движения от горизонтальных датчиков движения частиц могут быть математически повернуты с помощью измеренного азимутального угла.
[0063] На фиг.6 показан схематический вид наземной разведочной расстановки (включая систему сейсмических датчиков), которая включает в себя устройства 100 датчика в соответствии с некоторыми реализациями. В различных примерах устройства 100 датчика могут быть развернуты в морской разведочной расстановке.
[0064] Измерения, полученные устройствами 100 датчика, передаются в компьютерную систему 600, где эти измерения записываются (хранятся на носителе данных или носителях 610 данных). В некоторых примерах каждое устройство 100 датчика (или, по меньшей мере, одно из устройств 100 датчика) может включать в себя компьютерную систему 600, или по меньшей мере один или более процессоров 608 и носитель 610 данных (или носители данных). Измерения производятся устройствами 100 датчика в ответ на сейсмические волны, испускаемые одним или более сейсмических источников (не показаны). Сейсмические волны распространяются в подземную структуру 602 и отражается от представляющего интерес подземного элемента 604. Отраженные волны детектируются устройствами 100 датчика.
[0065] Компьютерная система 600 включает в себя модуль 606 вычисления данных вращательного движения и дивергенции, который может быть реализован посредством машиночитаемых инструкций, исполняемых на одном или более процессоров 608. Модуль 606 вычисления данных вращательного движения и дивергенции, как обсуждалось выше, может вычислять данные вращательного движения и данные дивергенции.
[0066] Процессор(ы) 608 может быть соединен с носителем 610 (или носителями) 610 данных, который может хранить данные, например, данные поступательного движения, полученные от устройств 100 датчика.
[0067] Носитель 610 (или носители) данных может быть реализован в виде одного или более читаемых компьютером или машиночитаемых носителей данных. Носители данных включают в себя различные формы запоминающих устройств, включая полупроводниковые запоминающие устройства, такие как динамические или статические оперативные запоминающие устройства (DRAM или SRAM), стираемые и программируемые постоянные запоминающие устройства (EPROM), электрически стираемые и программируемые постоянные запоминающие устройства (EEPROM) и флэш-память; магнитные диски, такие как несъемные, дискеты и съемные диски; другие магнитные носители, включая магнитную ленту; оптические носители, такие как компакт-диски (CD) или цифровые видеодиски (DVD); или устройства хранения данных других типов. Следует отметить, что описанные выше инструкции могут быть расположены на одном читаемом компьютером или машиночитаемом носителе данных, либо они могут быть расположены на множестве читаемых компьютером или машиночитаемых носителях данных, распределенных в большой системе, имеющей, возможно, множество узлов. Такой читаемый компьютером или машиночитаемый носитель данных (или носители) рассматривается в качестве части изделия (или изделия промышленного производства). Изделие или изделие промышленного производства могут относиться к любому одному компоненту или к множеству компонентов, произведенных промышленным образом. Носитель или носители данных могут быть расположены либо в устройстве, выполняющем машиночитаемые инструкции, либо они могут находиться в удаленном местоположении, из которого машиночитаемые инструкции могут быть загружены через сеть для их исполнения.
[0068] В вышеизложенном описании многочисленные детали приведены для обеспечения понимания раскрытого изобретения. Однако реализации изобретения могут быть осуществлены без некоторых из этих деталей. Другие реализации могут включать в себя модификации и изменения вышеописанных деталей. Прилагаемая формула изобретения охватывает такие модификации и изменения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЫЧИСЛЕНИЕ ДАННЫХ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ С ИСПОЛЬЗОВАНИЕМ ГРАДИЕНТА ДАННЫХ ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ | 2014 |
|
RU2605392C1 |
| КОНТРОЛИРУЮЩАЯ СИСТЕМА ДЛЯ КОЛЕС ТРАНСПОРТНОГО СРЕДСТВА И БЕСПРОВОДНОЙ ИЗМЕРИТЕЛЬНЫЙ МОДУЛЬ | 2006 |
|
RU2409480C2 |
| ОПРЕДЕЛЕНИЕ СКОРОСТИ ВОЛНОВОГО ПОЛЯ | 2012 |
|
RU2567182C2 |
| ПОНИЖЕНИЕ УРОВНЯ ШУМА С ИСПОЛЬЗОВАНИЕМ ДАННЫХ ВРАЩЕНИЯ | 2012 |
|
RU2562932C2 |
| СИСТЕМА И СПОСОБ СБОРА СЕЙСМИЧЕСКИХ ДАННЫХ | 2010 |
|
RU2523734C2 |
| СОВМЕСТНЫЕ ИНТЕРПОЛЯЦИЯ И ПОДАВЛЕНИЕ ВОЛН-СПУТНИКОВ В СЕЙСМИЧЕСКИХ ДАННЫХ | 2009 |
|
RU2507543C2 |
| СЕЙСМИЧЕСКАЯ СИСТЕМА С РЕЖЕКЦИЕЙ ВОЛНЫ-СПУТНИКА И ДВИЖЕНИЯ | 2011 |
|
RU2546997C2 |
| ОБРАБОТКА СЕЙСМИЧЕСКИХ ДАННЫХ | 2003 |
|
RU2344444C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОБРАБОТКИ СЕЙСМИЧЕСКИХ ДАННЫХ | 2013 |
|
RU2616650C2 |
| МНОГОКОМПОНЕНТНЫЙ ДАТЧИК АКУСТИЧЕСКИХ ВОЛН И СПОСОБЫ | 2011 |
|
RU2562711C2 |
Изобретение относится к области геофизики и может быть использовано для проведения сейсморазведочных мероприятий. Предложен способ изготовления сейсмического датчика, содержащий обеспечение первого сейсмического датчика и второго сейсмического датчика внутри удлиненного трубчатого корпуса, имеющего продольную ось. При этом первый сейсмический датчик и второй сейсмический датчик состоят из сенсорных устройств для измерения движения частиц по нескольким осям и предназначены для измерения данных поступательного движения в первом направлении. Причем указанные датчики движения частиц разнесены друг от друга вдоль второго, отличного направления по указанной продольной оси. Способ также включает герметизацию указанного корпуса для защиты датчиков движения частиц и обеспечение коммуникационного соединения с датчиками движения частиц для передачи сигналов, детектированных датчиками движения частиц, в систему для вычисления данных вращательного движения вокруг третьего направления на основе, по меньшей мере частично, вычисления градиента данных поступательного движения по отношению ко второму направлению. Технический результат – повышение точности и информативности получаемых данных. 3 з.п. ф-лы, 6 ил.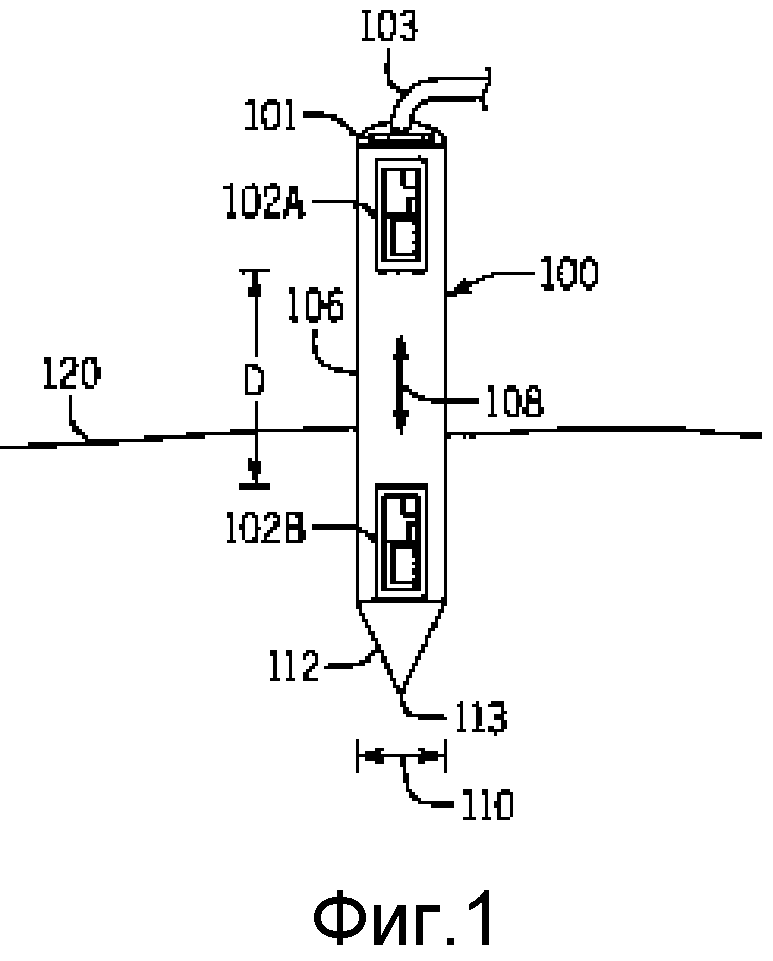
1. Способ изготовления сейсмического датчика, содержащий: обеспечение первого сейсмического датчика и второго сейсмического датчика внутри удлиненного трубчатого корпуса, имеющего продольную ось; при этом первый сейсмический датчик и второй сейсмический датчик состоят из сенсорных устройств для измерения движения частиц по нескольким осям и предназначены для измерения данных поступательного движения в первом направлении, причем указанные датчики движения частиц разнесены друг от друга вдоль второго, отличного направления по указанной продольной оси; и герметизация указанного корпуса для защиты датчиков движения частиц, и обеспечение коммуникационного соединения с датчиками движения частиц для передачи сигналов, детектированных датчиками движения частиц, в систему для вычисления данных вращательного движения вокруг третьего направления на основе, по меньшей мере частично, вычисления градиента данных поступательного движения по отношению ко второму направлению.
2. Способ по п.1, дополнительно содержащий формирование одного конца указанного трубчатого корпуса острым, так чтобы обеспечить его проникание через земную поверхность.
3. Способ по п.1, дополнительно содержащий обеспечение, внутри указанного корпуса, одного или более элементов, выбранных из группы, содержащей процессор и устройство датчика наклона.
4. Способ по п.1, в котором первый датчик движения частиц и второй датчик движения частиц коаксиальны по отношению к направлению, в котором они измеряют движение частиц.
| US 20120269033 A1, 25.10.2012 | |||
| Приводной барабан ленточного конвейера | 1973 |
|
SU457644A1 |
| Устройство для перевода стрелок с движущейся повозки | 1930 |
|
SU28923A1 |
| US 5010531 A1, 23.04.1991 | |||
| WO 2010090949 A3, 04.11.2010 | |||
| Способ сохранения битой птицы | 1932 |
|
SU32290A1 |

