Предлагаемое изобретение относится к конструкции космического аппарата, а более конкретно к конструкции узлов соединений космических аппаратов с системами отделения.
Известен юстировочный (калибровочный) космический аппарат «Тайфун-1Б» с гладкой калиброванной поверхностью. Корпус космического аппарата имеет сферическую форму. Для крепления КА «Тайфун-1Б» к ракете-носителю «Космос-3M» и отделения его на орбите использовалась конструкция системы отделения, состоящая из шасси и шарнирно соединенных с ним четырех двухплечих рычагов (см., например, журнал «Новости космонавтики» №3, март 2005 г., стр. 58-59). При этом узлы соединения космического аппарата «Тайфун-1Б» с системой отделения могут размещаться в любой точке симметричного корпуса сферической формы. Однако такую форму корпуса имеют только космические аппараты юстировочного (калибровочного) назначения. Поэтому для подавляющего числа современных космических аппаратов, имеющих форму корпуса, отличную от сферической формы, такая конструкция узлов соединения космического аппарата с системой отделения ракеты-носителя непригодна.
Известны космические аппараты «Стерх», которые выводились в космос двумя типами ракет-носителей с различным креплением космических аппаратов к системам отделения:
- космический аппарат «Стерх» №11 попутно с космическим аппаратом системы связи на ракете-носитель «Космос-3M»;
- космический аппарат «Стерх-2» №12 при групповом запуске с космическим аппаратом «Метеор-М» и другими космическими аппаратами на ракете-носитель «Союз-2.1б».
Комплекс бортовых служебных систем и полезная нагрузка космических аппаратов «Стерх» №11 и №12 были размещены внутри и снаружи корпуса приборного блока, состоящего из закрепленных между собой торцевых и боковых плат. Интерфейс с системой отделения космического аппарата «Стерх» №11 осуществлялся через узлы соединения, расположенные на нижней торцевой плате корпуса (см. журнал «Новости космонавтики», №9, август 2009 г. стр. 36, 37). Интерфейс с системой отделения космического аппарата «Стерх-2» №12 осуществлялся через узлы соединения, расположенные на одной из боковых плат корпуса (см. журнал «Новости космонавтики», №11, ноябрь 2009 г., стр. 34-40). Таким образом, конструктивно одинаковые космические аппараты выводились на двух разных типах ракет-носителей с различным креплением к системе отделения (с торца и сбоку). При этом для обеспечения стыковки с различными средствами выведения конструкция корпуса космического аппарата имела два варианта узлов соединения с двумя разными системами отделения. В результате космический аппарат с торцевым креплением на космическом аппарате связи (для попутной схемы запуска) при использовании в качестве средства выведения ракеты-носителя «Космос-3M» невозможно было установить на ракету-носитель «Союз-2.1б» (для групповой схемы запуска), где использовалось боковое крепление космического аппарата к ракете-носителю и наоборот. К недостаткам данного технического решения можно отнести то, что базовые расстояния между узлами соединения с системой отделения на торцевой и на боковой платах корпуса космического аппарата выполнены различными, поэтому при запуске конструктивно идентичных космических аппаратов использовались две конструктивно различные системы отделения.
Однозначность (определенность) положения космического аппарата «Стерх» при его установке на ракету-носитель является недостатком конструкции узлов соединения космического аппарата с системой отделения и не позволяет осуществлять запуск одного и того же космического аппарата разными типами ракет-носителей.
В процессе разработки космического аппарата нередко меняется тип средства выведения, предназначенного для его запуска. В некоторых случаях на первоначальных этапах проектирования космического аппарата рассматриваются варианты вывода космического аппарата на орбиту функционирования несколькими типами ракет-носителей с применением различных схем запуска (попутный запуск на базовом космическом аппарате, групповой запуск на едином адаптере, попутный запуск совместно с основным космическим аппаратом на разгонном блоке и др.). Разнообразие используемых схем запуска космических аппаратов на разных типах ракет-носителей предопределяет их различное крепление с системами отделения на выбранных вариантах ракет-носителей. Как правило, большинство космических аппаратов имеют определенную конструкцию узлов соединения с системой отделения, позволяющую однозначно устанавливать космический аппарат на конкретно выбранное средство выведения. Использование же в качестве средства выведения другого типа ракеты-носителя невозможно либо приведет к необходимости изменения корпуса и узлов соединения космического аппарата с системой отделения при его адаптации к новому средству выведения, что является недостатком конструкции.
Задачей (целью) предлагаемого изобретения является расширение функциональных возможностей (возможность установки космического аппарата при разной ориентации его продольной оси по отношению к продольной оси ракеты-носителя и в разных положениях стыковки космического аппарата с системой отделения: нижней торцевой платой корпуса или боковой платой корпуса, в зависимости от выбранного средства выведения и схемы размещения на нем) космического аппарата.
Поставленная задача (цель) достигается тем, что в предлагаемом космическом аппарате, содержащем корпус с комплексом служебных бортовых систем, состоящий из закрепленных между собой торцевой и боковых плат, узлы соединения с системой отделения и полезную нагрузку, установленную на корпусе, узлы соединения с системой отделения размещаются на стыковочной плате, установленной на корпусе посредством шарниров и цапф, соединенных между собой поворотными регулируемыми штангами. Шарниры закрепляются на торцевой плате корпуса (в зоне соединения с одной из боковых плат корпуса), а цапфы устанавливаются на стыковочной плате. Оси вращения шарниров и цапф перпендикулярны продольной оси корпуса, а продольные оси поворотных регулируемых штанг перпендикулярны осям вращения шарниров и цапф. Стыковочная плата снабжается элементами крепления стыковочной платы к корпусу, а ответные элементы крепления стыковочной платы размещаются на торцевой плате и на одной из боковых плат корпуса (на той боковой плате, на стыке с которой закрепляются шарниры). Узлы соединения с системой отделения размещаются на поверхности стыковочной платы, противоположной наружной поверхности торцевой платы корпуса. Каждая поворотная регулируемая штанга выполняется состоящей из двух полуштанг, соединенных между собой резьбовой стяжкой.
Вариантность размещения космического аппарата в подобтекательном пространстве и возможность запуска космического аппарата на различных типах ракет-носителей достигается за счет размещения узлов соединения космического аппарата с системой отделения на стыковочной плате, которую можно переустанавливать (перекладывать) с торцевой платы корпуса космического аппарата на одну из боковых плат корпуса и наоборот. Переустановка стыковочной платы из одного положения в другое осуществляется путем поворота вместе с поворотными регулируемыми штангами на шарнирах, размещенных на торцевой плате корпуса, с последующим поворотом стыковочной платы на цапфах, установленных на стыковочной плате, на 180° относительно поворотных регулируемых штанг и креплением стыковочной платы на другой плате корпуса космического аппарата.
Выполнение каждой регулируемой поворотной штанги, состоящей из двух полуштанг, соединенных между собой резьбовой стяжкой, позволяет изменять длину штанг для обеспечения крепления стыковочной платы при ее переустановке с одной платы на другую плату корпуса космического аппарата.
Предлагаемое устройство поясняется на фиг. 1-8.
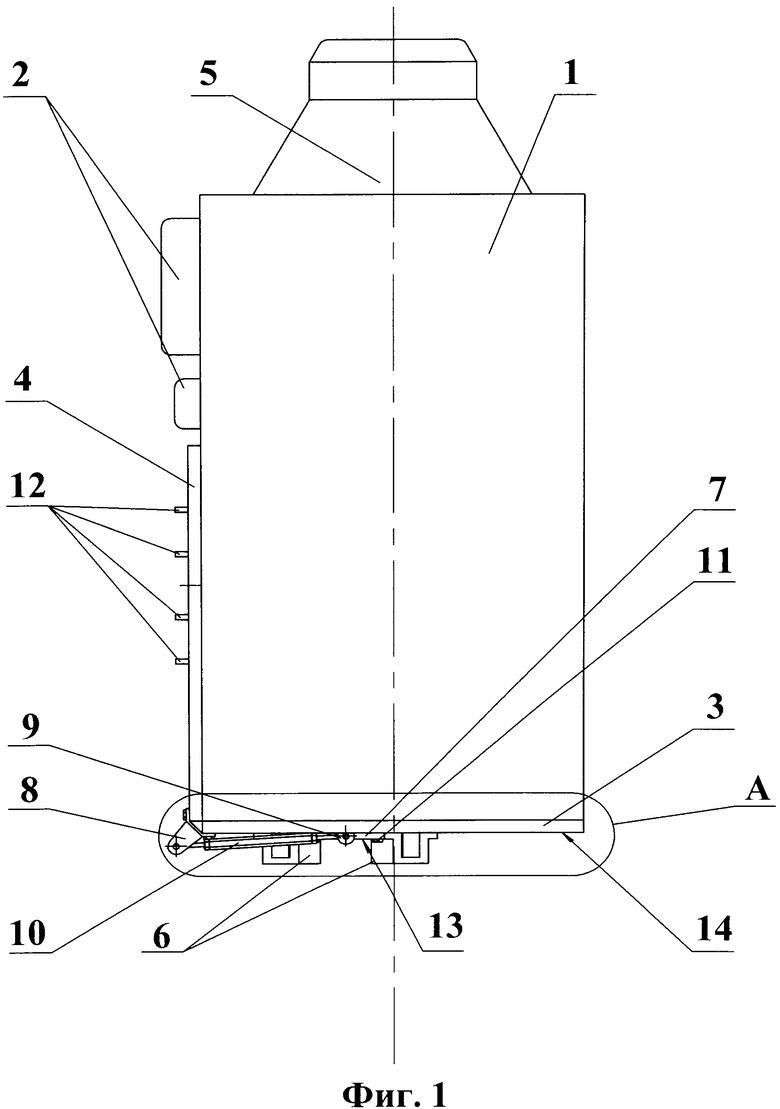
На фиг. 1 представлен общий вид космического аппарата со стыковочной платой, закрепленной на торцевой плате корпуса.
На фиг. 2 изображен общий вид космического аппарата при повороте стыковочной платы вместе с поворотными регулируемыми штангами на шарнирах.
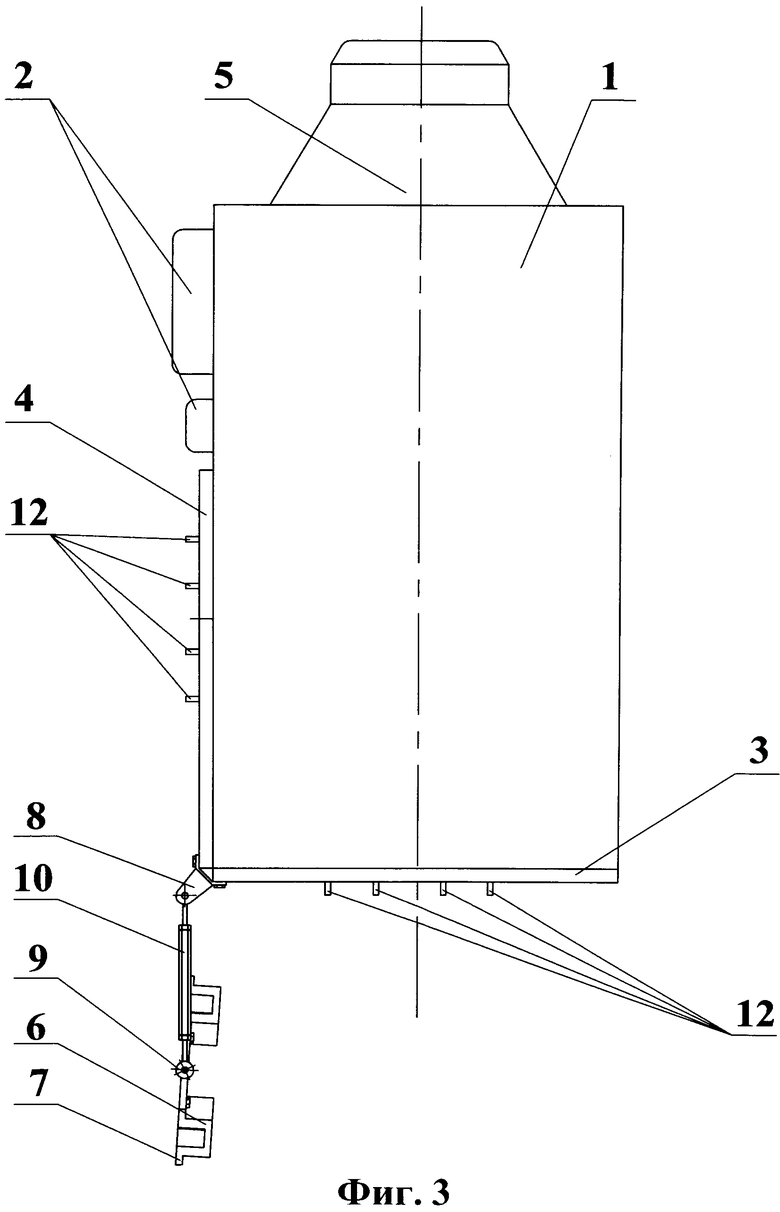
На фиг. 3 показан общий вид космического аппарата после поворота стыковочной платы на цапфах относительно поворотных регулируемых штанг.
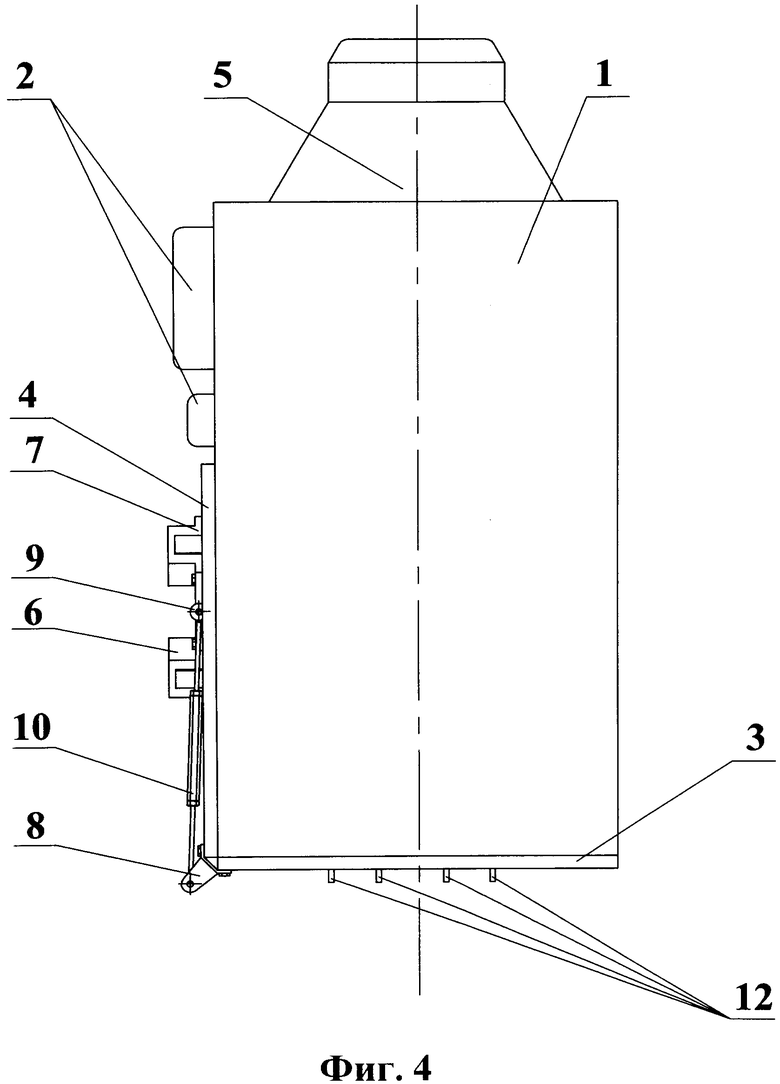
На фиг. 4 представлен общий вид космического аппарата со стыковочной платой, переустановленной и закрепленной на боковую плату корпуса.
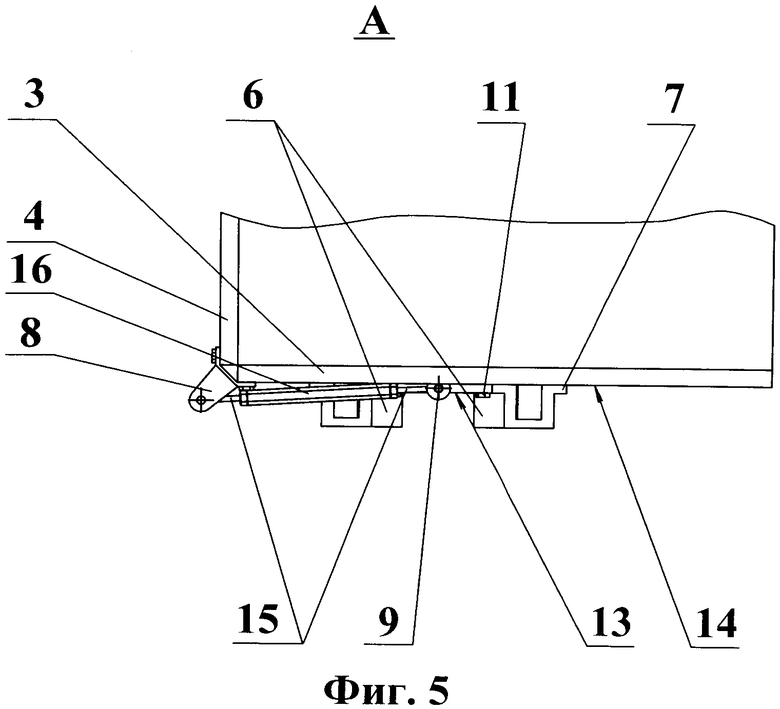
На фиг. 5 изображен выносной элемент A согласно фиг. 1.
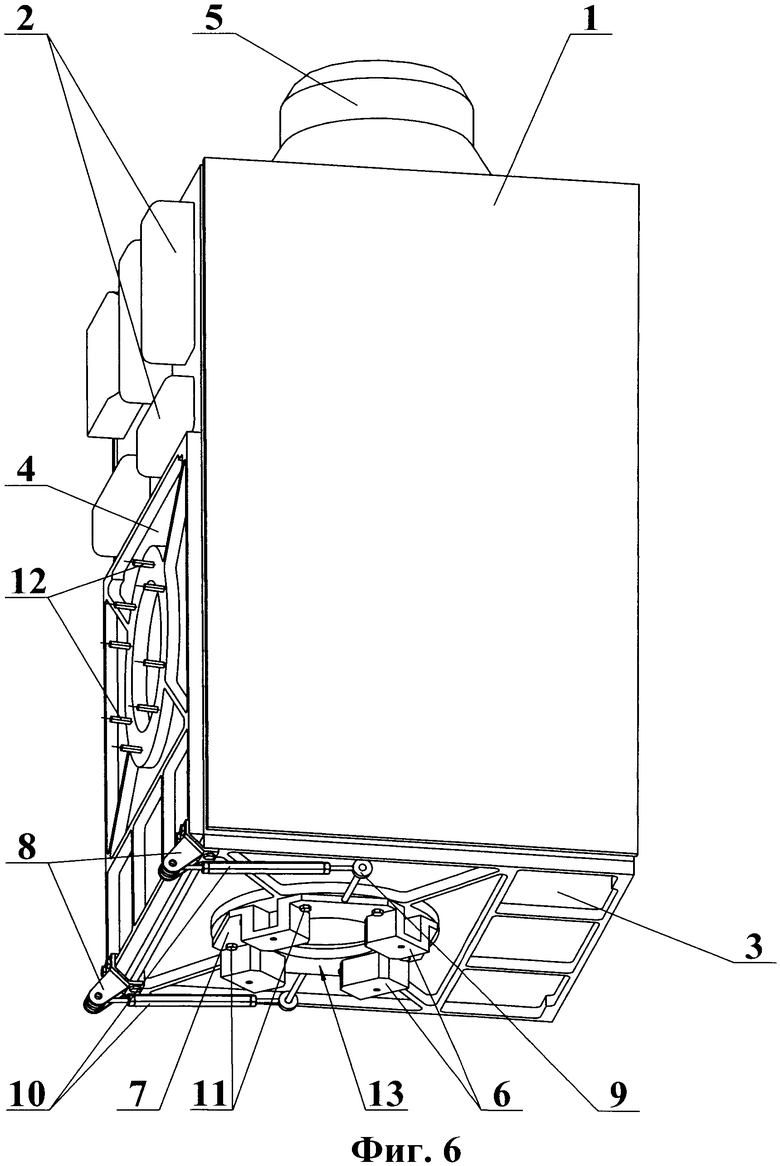
На фиг. 6 показана объемная модель космического аппарата со стыковочной платой, закрепленной на торцевой плате корпуса.
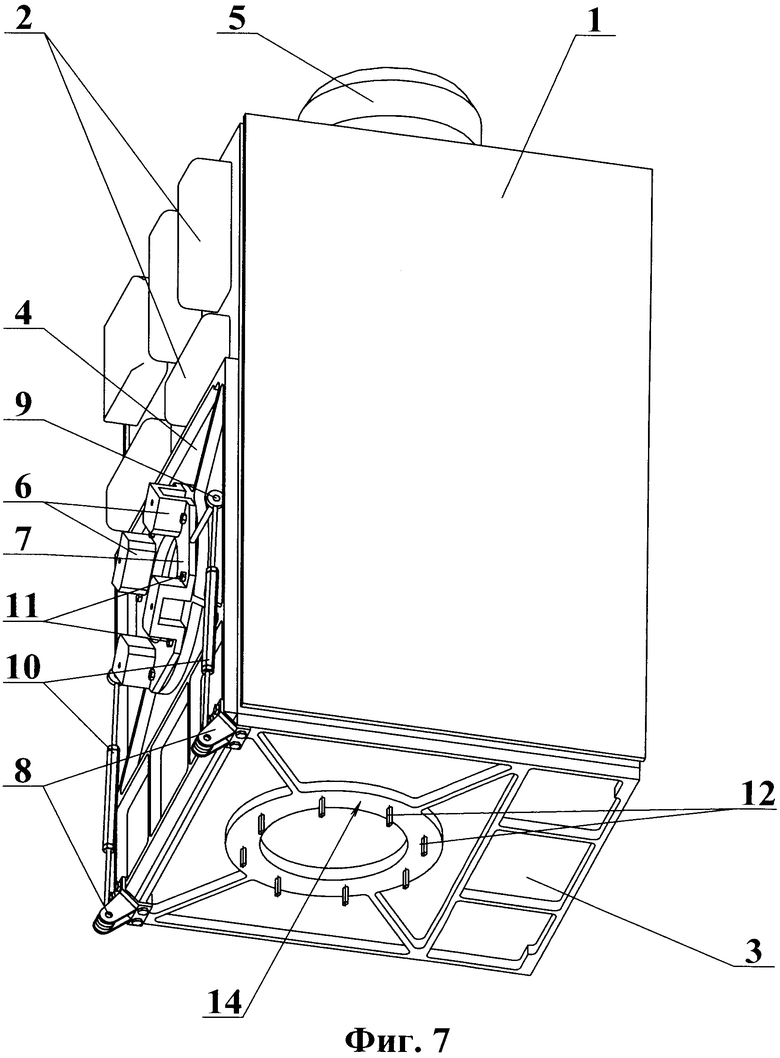
На фиг. 7 представлена объемная модель космического аппарата со стыковочной платой, закрепленной на боковой плате корпуса.
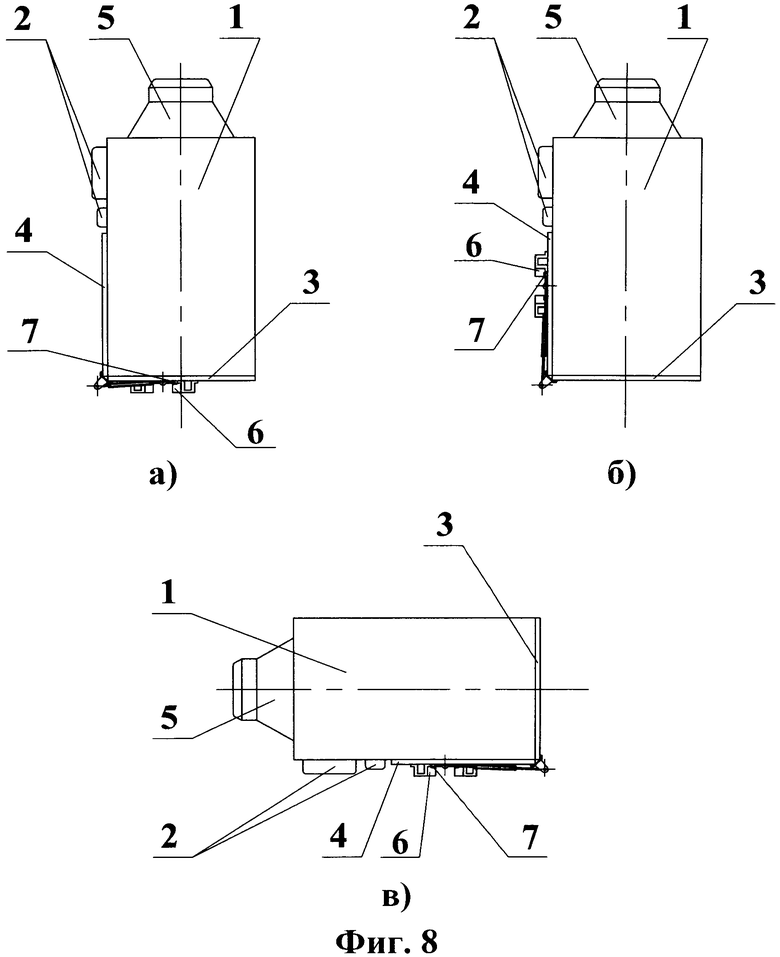
На фиг. 8 а, б, в изображены варианты положения космического аппарата перед стыковкой с системой отделения ракеты-носителя.
Космический аппарат содержит корпус 1 (фиг. 1) с комплексом служебных бортовых систем 2 (при этом часть приборов комплекса служебных бортовых систем 2 размещена внутри корпуса 1, другая часть приборов комплекса служебных бортовых систем 2 размещена снаружи корпуса 1). Корпус 1 состоит из закрепленных (элементы крепления на фиг. условно не показаны) между собой торцевой платы 3 и боковых плат 4. Космический аппарат содержит также полезную нагрузку 5, установленную на корпусе 1, и узлы соединения 6 с системой отделения (на фиг. условно не показана). Узлы соединения 6 с системой отделения размещаются на стыковочной плате 7, которая устанавливается на корпусе 1 посредством шарниров 8 и цапф 9. Шарниры 8 закрепляются на торцевой плате 3 корпуса 1, а цапфы 9 устанавливаются на стыковочной плате 7. Шарниры 8 и цапфы 9 соединяются между собой поворотными регулируемыми штангами 10. Шарниры 8 и цапфы 9 устанавливаются таким образом, что их оси вращения перпендикулярны продольной оси корпуса 1 (фиг. 1, 4), а продольные оси поворотных регулируемых штанг 10 перпендикулярны осям вращения шарниров 8 и цапф 9. Стыковочная плата 7 снабжается элементами крепления 11 стыковочной платы к корпусу 1, а ответные элементы крепления 12 стыковочной платы размещаются на торцевой плате 3 и на одной из боковых 4 плат корпуса 1, причем узлы соединения 6 с системой отделения размещаются на поверхности 13 стыковочной платы 7, противоположной наружной поверхности 14 торцевой платы 3 корпуса 1.
Каждая поворотная регулируемая штанга 10 выполняется состоящей из двух полуштанг 15 (фиг. 5), которые соединяются между собой резьбовой стяжкой 16. Расстояния от шарниров 8 до мест крепления стыковочной платы 7 на торцевой плате 3 или на боковой плате 4 корпуса 1 могут отличаться, поэтому для обеспечения точной установки стыковочной платы 7 на торцевую 3 или на боковую 4 платы корпуса 1 проводится регулировка длины поворотных регулируемых штанг 10. Изменение длины каждой штанги 10 производится путем вращения ее резьбовой стяжки 16 в ту или иную строну.
Предлагаемое устройство функционирует следующим образом.
В вертикальном положении космический аппарат со стыковочной платой 7,. установленной на торцевой плате 3 корпуса 1, выгружается из транспортировочного контейнера (на фиг. условно не показан) и устанавливается нижней торцевой платой 3 на специальную технологическую подставку (на фиг. условно не показана). Конструктивной особенностью технологической подставки является отсутствие боковой стенки, позволяющей осуществлять поворот стыковочной платы 7 с нижней торцевой платы 3 на боковую плату 4 корпуса 1 космического аппарата. Следует отметить, что переустановку стыковочной плата 7 можно провести и на вывешенном космическом аппарате на крюке крана (на фиг. условно не показан).
Если предполагается установка космического аппарата на ракету-носитель боковой платой, при ориентации продольной оси космического аппарата параллельно продольной оси ракеты-носителя (фиг. 86), то после проведения необходимых подготовительных операций проводится переустановка стыковочной платы 7 с торцевой платы 3 на боковую плату 4 корпуса 1 в следующей последовательности:
- стыковочная плата 7 открепляется от нижней торцевой платы 3 корпуса 1 путем расстыковки элементов крепления 11 и ответных элементов 12, расположенных на торцевой плате 3 (фиг. 1. 6);
- стыковочная плата 7 вместе со штангами 10 на шарнирах 8 поворачивается вниз от торцевой платы 3 на 90° (фиг. 2). При этом узлы соединения 6 с системой отделения направлены (ориентированы) на боковую плату 4 корпуса 1;
- стыковочная плата 7 на цапфах 9 поворачивается на 180° относительно штанг 10 (фиг. 3). После данного поворота узлы соединения 6 с системой отделения направлены (ориентированы) наружу от боковой платы 4 корпуса 1;
- стыковочная плата 7 вместе со штангами 10 на шарнирах 8 поворачивается на 180° (доворачивается) вверх до контакта с боковой платой 4 корпуса 1 (фиг. 4);
- при необходимости производится регулировка длины поворотных штанг 10 для обеспечения стыковки элементов крепления 11 и 12 на боковой плате 4 корпуса 1;
- стыковочная плата 7 закрепляется на боковой плате 4 корпуса 1 путем стыковки элементов крепления 11 и ответных элементов 12, расположенных на боковой плате 4 корпуса 1 (фиг. 4, 7).
После осуществления данных поворотов узлы соединения 6 с системой отделения, которые первоначально были размещены на поверхности 13 стыковочной платы 7, противоположной наружной поверхности 14 торцевой платы 3 корпуса 1, оказываются размещенными на поверхности стыковочной платы 7, противоположной наружной поверхности боковой платы 4 корпуса 1, в положении, необходимом для последующей стыковки космического аппарата с системой отделения.
Затем космический аппарат краном (на фиг. условно не показан) в вертикальном положении (продольная ось космического вертикальна, стыковочная плата 7 закреплена на боковой плате 4 корпуса 1) переносится на стыковку с системой отделения ракеты-носителя (на фиг. условно не показана).
Если космический аппарат устанавливается на ракету-носитель нижней торцевой платой 3 при ориентации продольной оси космического аппарата параллельно продольной оси ракеты-носителя (фиг. 8а), то переустановка стыковочной платы 7 не производится. А после проведения необходимых подготовительных операций космический аппарат краном (на фиг. условно не показан) в вертикальном положении (продольная ось космического аппарата вертикальна, стыковочная плата 7 закреплена на нижней торцевой плате 3 корпуса 1 - исходное положение космического аппарата после выгрузки из транспортировочного контейнера) переносится на стыковку с системой отделения ракеты-носителя.
Предложенная конструкция космического аппарата с переустанавливаемой стыковочной платой 7 позволяет адаптировать космический аппарат к различным типам средств выведения.
Следует отметить также, что космический аппарат с переустанавливаемой стыковочной платой 7 можно выводить одной ракетой-носителем, но при разных положениях космического аппарата по отношению к продольной оси средства выведения. Например, по условиям размещения космического аппарата в зоне полезного груза в подобтекательном пространстве ракеты-носителя или для обеспечения необходимых зазоров между отдельными космическими аппаратами при групповом запуске может возникнуть необходимость размещения космического аппарата при ориентации продольной оси космического аппарата перпендикулярно продольной оси ракеты-носителя. В этом случае (фиг. 8,в) после проведения необходимых подготовительных операций проводится переустановка стыковочной платы 7 с торцевой платы 3 на боковую плату 4 корпуса 1 в такой же последовательности, как описано выше. После чего космический аппарат краном (на фиг. условно не показан) в вертикальном положении переносится на кантователь (на фиг. условно не показан) и кантуется в горизонтальное положение. Затем космический аппарат краном в горизонтальном положении (продольная ось космического аппарата горизонтальна, стыковочная плата 7 закреплена на боковой плате 4 корпуса 1) переносится на стыковку с системой отделения ракеты-носителя.
Таким образом, предложенная конструкция космического аппарата с переустанавливаемой стыковочной платой 7, на которой размещены узлы соединения 6 с системой отделения, позволяет провести адаптацию космического аппарата к различным средствам выведения (с боковым или торцевым креплением космического аппарата на ракете-носителе) или установить космический аппарат на одном и том же средстве выведения, но при различном положении (ориентации) космического аппарата на ракете-носителе (фиг. 8).
Использование же механизма поворота стыковочной платы 7, состоящего из шарниров 8. цапф 9, поворотных регулируемых штанг 10, позволяет легко и быстро провести повороты стыковочной платы 7 для ее установки и крепления к корпусу 1 в необходимое положение (торцевое или боковое и наоборот) для последующего соединения космического аппарата с системой отделения, что повышает точность и оперативность (за счет более быстрой установки стыковочной платы 7 на ответные элементы крепления 12) переустановки стыковочной платы 7 из одного положения в другое.
Использование предложенного космического аппарата с узлами соединения 6 с системой отделения, размещенными на переустанавливаемой стыковочной плате 7, позволит обеспечить стыковку космического аппарата в различных положениях на разных типах ракет-носителей с использованием конструктивно идентичной системы отделения.
Таким образом, предложенное устройство космического аппарата имеет существенные отличия от ранее известных космических аппаратов и позволяет расширить их функциональные возможности.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАВЕРСА ДЛЯ СТЫКОВКИ КРУПНОГАБАРИТНОГО КОСМИЧЕСКОГО АППАРАТА С РАКЕТОЙ-НОСИТЕЛЕМ, СНАБЖЕННОЙ НАДКАЛИБЕРНЫМ ГОЛОВНЫМ ОБТЕКАТЕЛЕМ | 2007 |
|
RU2362724C2 |
| МИКРОСПУТНИК ДЛЯ ДИСТАНЦИОННОГО ЗОНДИРОВАНИЯ ПОВЕРХНОСТИ ЗЕМЛИ | 2010 |
|
RU2457157C1 |
| СИСТЕМА ОТДЕЛЕНИЯ КОСМИЧЕСКОГО АППАРАТА И СПОСОБ ЕЕ СБОРКИ И УСТАНОВКИ | 2015 |
|
RU2586942C1 |
| КОСМИЧЕСКАЯ ПЛАТФОРМА | 2008 |
|
RU2376212C1 |
| Адаптер для установки космических аппаратов | 2017 |
|
RU2661375C1 |
| СИСТЕМА ОТДЕЛЕНИЯ КОСМИЧЕСКОГО АППАРАТА | 2012 |
|
RU2514981C2 |
| СПОСОБ ОТДЕЛЕНИЯ ОТ РАКЕТЫ-НОСИТЕЛЯ ГРУППЫ КОСМИЧЕСКИХ АППАРАТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2670359C2 |
| КОНТЕЙНЕР | 2007 |
|
RU2360856C2 |
| СИСТЕМА ОТДЕЛЕНИЯ ПОЛЕЗНОЙ НАГРУЗКИ | 2009 |
|
RU2396191C1 |
| МНОГОЦЕЛЕВАЯ СЛУЖЕБНАЯ ПЛАТФОРМА ДЛЯ СОЗДАНИЯ КОСМИЧЕСКИХ АППАРАТОВ | 2008 |
|
RU2375267C1 |
Изобретение относится к конструкции космического аппарата (КА). КА содержит корпус с комплексом служебных бортовых систем, полезную нагрузку и узлы соединения с системой отделения. Корпус состоит из закрепленных между собой торцевой и боковых плат. Узлы соединения КА с системой отделения размещены на стыковочной плате, установленной на корпусе посредством шарниров и цапф, соединенных между собой поворотными регулируемыми штангами. Шарниры закреплены на торцевой плате корпуса, а цапфы установлены на стыковочной плате. Стыковочная плата имеет возможность переустановки с торцевой платы корпуса на одну из боковых плат посредством вращения на шарнирах и цапфах. Стыковочная плата может крепиться к корпусу в двух положениях посредством соединения элементов крепления с ответными элементами, размещенными на торцевой плате и на одной из боковых плат корпуса. Каждая поворотная регулируемая штанга выполнена состоящей из двух полуштанг, соединенных между собой резьбовой стяжкой. Технический результат изобретения заключается в возможности стыковки КА в различных положениях на разных типах ракет-носителей с использованием конструктивно идентичной системы отделения. 1 з.п. ф-лы, 8 ил.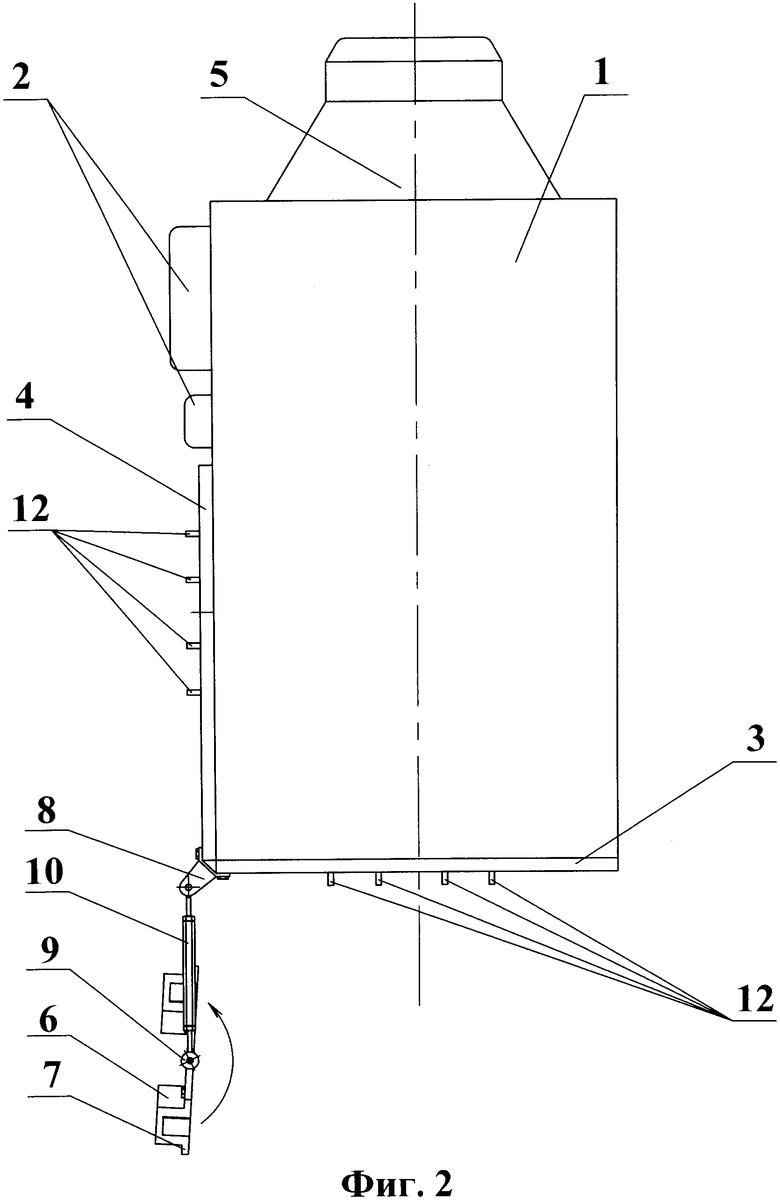
1. Космический аппарат, содержащий корпус с комплексом служебных бортовых систем, состоящий из закрепленных между собой торцевой и боковых плат, полезную нагрузку, установленную на корпусе, узлы соединения с системой отделения, отличающийся тем, что узлы соединения с системой отделения размещены на стыковочной плате, установленной на корпусе посредством шарниров и цапф, соединенных между собой поворотными регулируемыми штангами, при этом шарниры закреплены на торцевой плате корпуса, а цапфы установлены на стыковочной плате, причем оси вращения шарниров и цапф перпендикулярны продольной оси корпуса, а продольные оси поворотных регулируемых штанг перпендикулярны осям вращения шарниров и цапф, при этом стыковочная плата снабжена элементами крепления стыковочной платы к корпусу, а ответные элементы крепления стыковочной платы размещены на торцевой плате и на одной из боковых плат корпуса, причем узлы соединения с системой отделения размещены на поверхности стыковочной платы, противоположной наружной поверхности торцевой платы корпуса.
2. Космический аппарат по п. 1, отличающийся тем, что каждая поворотная регулируемая штанга выполнена состоящей из двух полуштанг, соединенных между собой резьбовой стяжкой.
| П | |||
| Шаров | |||
| "Первый "Стерх" для системы КОСПАС/SARSAT", Новости космонавтики, N9, 2009, с | |||
| Коридорная многокамерная вагонеточная углевыжигательная печь | 1921 |
|
SU36A1 |
| Афанасьев | |||
| "Новый "Метеор" со товарищи", Новости космонавтики, N11, 2009, с | |||
| Нивелир для отсчетов без перемещения наблюдателя при нивелировании из средины | 1921 |
|
SU34A1 |

