Изобретение относится к космическим аппаратам, а именно к микроспутникам - космическим аппаратам малой массой, предназначенным для съемки поверхности Земли (дистанционного зондирования) и передачи изображения на наземные пункты управления.
Острота проблем по созданию микроспутников для дистанционного зондирования поверхности Земли в основном определяется разрешением используемого оптико-электронной системы. Как правило, в состав оптико-электронной системы входит оптическая часть в виде последовательно соединенных между собой цилиндрической бленды, оптического блока и блока аппаратуры системы приема и преобразования информации. Оптико-электронные системы с низким разрешением обладают малыми габаритами и массой, что значительно упрощает процесс создания микроспутника (возможны различные компоновочные схемы расположения оптико-электронной системы на микроспутнике). Трудности по созданию микроспутника возникают в случае использования оптико-электронной системы с высоким разрешением. В этом случае масса оптико-электронной системы может достигать 35-40 кг, диаметр порядка 400-500 мм, а дина более 1000 мм.
Основными требованиями к микроспутнику дистанционного зондирования поверхности Земли являются:
- минимальная масса и габариты микроспутника для обеспечения запуска групповым или попутным способом и обеспечения вертикальной транспортировки самолетами легкого и среднего классов;
- снижение вибромеханических нагрузок на оптико-электронную систему;
- обеспечение заданной точности съемки поверхности Земли путем стабильности взаимного расположения оптико-электронной системы и датчиков определения звездных координат микроспутника;
- обеспечение заданных температурных режимов функционирования оптико-электронной системы;
- повышение надежности функционирования микроспутника;
- обеспечение технологичности работ по сборке/разборке микроспутника и др.
При использовании оптико-электронной системы с высоким разрешением известны следующие варианты компоновки микроспутника:
- расположение оптико-электронной системы снаружи корпуса микроспутника, при котором ее продольная ось параллельна плоскости платы, на которой расположена система отделения микроспутника;
- расположение оптико-электронной системы снаружи корпуса микроспутника, при котором ее продольная ось перпендикулярна плоскости платы, на которой расположена система отделения микроспутника. Известен микроспутник, в котором оптико-электронная система (оптическая камера) расположена снаружи корпуса (см. журнал «Новости космонавтики», №10, октябрь 2008 г., стр 33-34). Оптическая камера расположена в верхней части микроспутника так, что ее продольная ось параллельна плоскости платы, на которой расположена система отделения микроспутника.
На данном микроспутнике используется торцевая схема закрепления на адаптере ракеты-носителя, когда на участке выведения вектор осевой перегрузки перпендикулярен плоскости нижней платы корпуса, на которой расположена система отделения. При такой компоновке оптико- электронной системы с длиной не менее 1000 мм увеличиваются поперечные габариты и ухудшаются массогабаритные характеристики микроспутника за счет низкой плотности компоновки микроспутника в целом. Увеличение поперечных габаритов микроспутника значительно затрудняет его адаптацию к ракете-носителю при групповом или попутном запуске.
Под адаптацией микроспутника к ракете-носителю понимается не только его размещение на ракете-носителе, но и согласование и в ряде случаев обеспечение заданного уровня механического нагружения на элементы микроспутника.
Для данного микроспутника нагрузки от ракеты-носителя на участке выведения через адаптер, систему отделения спутника, его конструкцию передаются на оптическую камеру, расположенную в верхней части микроспутника.
Как показывает опыт наземной экспериментальной отработки динамической прочности микроспутников в составе адаптеров для группового и попутного запуска и их систем отделения динамические и импульсные нагрузки, действующие на элементы микроспутников, определяются демпфирующими свойствами конструкции микроспутников, адаптеров и устройств закрепления спутников на адаптере.
В полете в плоскости стыка с ракетой-носителем действуют по трем ортогональным осям квазистационарные широкополосные случайные вибрации. Максимальные уровни полетных вибраций приходятся на момент старта и во время полета в плотных слоях атмосферы в трансзвуковом режиме.
Виброударные ускорения в плоскости стыка с ракетой-носителем возникают при запуске и выключении двигателей ступеней, разделении ступеней. Виброударные процессы представляют собой переходные затухающие вибрации. Низкочастотные виброудары возникают при включении и выключении двигателей маршевых ступеней. Высокочастотные виброудары вызываются срабатыванием пиротехнических устройств, используемых для разделения ступеней и сброса головного обтекателя.
Обычно, при разработке адаптера для попутного (или группового) запуска спутника, ставится задача снижения вибродинамических и ударных нагрузок (см., например, патент №. №2248310). Это связано с тем, что конструкция и приборы запускаемых микроспутников могут не выдерживать действующие нагрузки либо от ракеты-носителя, либо от систем отделения. В описанном микроспутнике на участке выведения ракеты-носителя оптическая камера расположена в верхней части спутника неоптимальным для восприятия нагрузок положением и является самым чувствительным к механическим нагрузкам элементом. В этом случае задача обеспечения требуемых значений механических нагрузок на оптическую камеру наиболее оптимально может быть решена только с учетом подбора требуемых демпфирующих свойств конструкции микроспутника, что является существенным недостатком. Кроме того, и на систему амортизации адаптера накладываются дополнительные требования по учету демпфирующих свойств конструкции микроспутника, что усложняет систему амортизации и является недостатком.
При торцевой схеме закрепления микроспутника на адаптере ракеты-носителя наиболее оптимальной является компоновка микроспутника, в котором продольная ось оптико-электронной системы (оптической камеры) совпадает с продольной осью микроспутника и она расположена в верхней части микроспутника.
Известен микроспутник VENµS с торцевой схемой закрепления на адаптере ракеты-носителя, в котором оптико-электронная система (суперспектральная камера) расположена на одном из торцов микроспутника, а ее ось совпадает с продольной осью микроспутника (см. журнал «Новости космонавтики», №6, июнь 2007 г., стр.42). Информация по данному микроспутнику также приведена в Приложении, рис.1, 2). Данный микроспутник взят за прототип.
Микроспутник VENµS разработан на базе унифицированной служебной платформы IMPS (Improved Multi Purpose Satellite). На служебной платформе размещается все служебное оборудование, включающее источники питания, двигатели ориентации, солнечные батареи, звездный датчик, радиотехнические и другие системы. Служебная платформа компоновочно отделена от модуля полезной нагрузки - суперспектральной камеры (масса 36 кг, длина 1.2 м, максимальный диаметр 0.4 м), которая установлена на торец платформы и расположена соосно с корпусом платформы.
Суперспектральная камера (оптико-электронная система) состоит из оптического и электронного модуля, последовательно соединенных между собой. Как правило, в состав оптического модуля входят бленда и оптический блок. Электронный модуль представляет собой блок аппаратуры системы приема и преобразования информации.
Корпус микроспутника выполнен в виде шестигранника с торцевыми платами с расположенными в нем электронными приборами, на верхний торец корпуса установлена надставка с силовым поясом, расположенным вокруг оптико-электронной системы. Панели солнечной батареи закреплены в двух точках: одна точка расположена на корпусе микроспутника, а вторая - на надставке корпуса.
Силовой пояс выполнен в виде форменной конструкции, в верхней части которого в районе торца оптико-электронной системы смонтирована светозащитная крышка оптико-электронной системы и некоторые приборы микроспутника.
Недостатки микроспутника по прототипу заключаются в следующем:
- установка мультиспектральной камеры на верхнюю плату приборного блока без заглубления в корпус приборного блока снижает плотность компоновки микроспутника в целом за счет увеличения его длины, что ведет к увеличению массы микроспутника;
увеличение габаритов микроспутника значительно затрудняет его адаптацию к ракете-носителю при групповом или попутном запуске;
увеличение длины микроспутника не позволяет использовать самолеты класса Ан-72, Ан-74 для наиболее выгодного по условиям нагружения микроспутника вертикального способа транспортировки микроспутника;
расположение мультиспектральной камеры на верхней плате приборного блока без заглубления в корпус приборного блока является неоптимальным для восприятия нагрузок на участке выведения; обеспечение заданных параметров жесткости с целью обеспечения допустимого уровня механического нагружения камеры на участке выведения в этом случае может быть достигнуто усилением как конструкции платформы, так и мультиспектральной камеры, что ведет к увеличению массы;
для принятой компоновки микроспутника и идеологии его создания на базе унифицированной спутниковой платформы мультиспектральная камера по тепловым режимам полностью «развязана» со спутниковой платформой;
обеспечение тепловых режимов мультиспектральной камеры в этом случае может быть осуществлено только техническими решениями по самой камере; в результате будет увеличена масса системы обеспечения тепловых режимов мультиспектральной камеры;
в микроспутнике по прототипу на платформу смонтирован специальный корпус (надставка), устанавливаемый на платформу и используемый для закрепления верхнего пояса узлов крепления панелей солнечных батарей. При этом нижний пояс узлов крепления панелей солнечных батарей расположен на самой платформе. Такое расположение верхнего и нижнего узлов крепления панелей солнечных батарей, к которым предъявляются повышенные требования по точности взаимного расположения (узлы замков, оси поворотных шарниров, механизмы поворота панелей солнечных батарей) не обеспечивает требуемые точности и приводит к увеличению моментов сопротивления для приводов раскрытия панелей или необходимости юстировки элементов узлов крепления в составе микроспутника, что является недостатком;
обычно высокая точность наведения мультиспектральной камеры при проведении съемок поверхности Земли обеспечивается использованием в составе системы ориентации и стабилизации микроспутника звездного датчика и точной выставкой осей камеры и звездного датчика; при расположении мультиспектральной камеры на торце микроспутника, а звездного датчика в корпусе служебной платформы задача точной выставки осей камеры и звездного датчика усложняется; кроме того, температурные деформации конструкции платформы микроспутника в полете приведут к снижению точности выставки осей камеры и звездного датчика, что является недостатком.
Выполнение корпуса микроспутника шестигранной формы обладает следующими недостатками:
- поскольку узлы стыковки микроспутника с системой отделения адаптера формируются в узлах соединения боковых плат, в микроспутнике-прототипе образуются 6 узлов стыковки (обычная схема системы отделения использует 4 узла стыковки); при использовании для разрыва механической связи разрывных болтов возникают повышенные ударные нагрузки на микроспутник и приборы ракеты-носителя; при использовании других способов точечного разрыва механической связи между микроспутником и адаптером ракеты-носителя возникает структурная избыточность узлов связи, что снижает надежность функционирования системы отделения микроспутника;
- ограниченная ширина боковых плат из-за шестигранной формы корпуса (меньшая по отношению к ширине боковых плат корпуса в виде параллелипипеда) приводит к увеличению количества панелей солнечной батареи: в микроспутнике по прототипу солнечная панель состоит из двух крыльев, в каждом из которых установлены три панели; все это приводит к увеличению массы солнечной батареи и к снижению надежности функционирования проводов раскрытия панелей солнечной батареи из-за увеличения количества приводов;
- обычно для обеспечения функционирования оптико-электронной системы необходимо вводить в состав микроспутника ряд приборов целевой аппаратуры, среди них: бортовые запоминающие устройства, передатчики, антенно-фидерные устройства; в конструкции микроспутника по прототипу приборы целевой аппаратуры могут монтироваться либо в служебной платформе, либо в верхней части микроспутника на силовом каркасе в зоне, ограниченной надставкой корпуса; поскольку микроспутник по прототипу создается на основе унифицированной платформе, то монтаж целевой аппаратуры в служебной платформе приведет к значительным доработкам боковых плат, что является недостатком; монтаж целевой аппаратуры на силовом каркасе ставит дополнительную задачу обеспечения тепловых режимов ее функционирования, что также является недостатком;
- доступ к приборам служебной и целевой аппаратуры возможен путем полного снятия боковых плат, что снижает технологичность, работ по сборке микроспутника;
- установка светозащитной крышки у торца оптико-электронной системы на силовом каркасе приводит к увеличению длины и массы силового каркаса; кроме того, наземная отработка привода открытия/закрытия светозащитной крышки возможна в этом случае только в составе микроспутника, что также является недостатком.
Целью заявляемого решения является улучшение тактико-технических, эксплуатационных и технологических характеристик микроспутника дистанционного зондирования поверхности Земли, в том числе: снижение массогабаритных характеристик, повышение точности наведения оптико-электронной системы при съемке поверхности Земли, обеспечение условий функционирования оптико-электронной системы в составе микроспутника, повышение надежности его функционирования, улучшение условий адаптации микроспутника при групповом или попутном запуске, обеспечение технологичности при проведении сборочных и разборочных работ.
Поставленная цель достигается тем, что корпус микроспутника выполнен в виде прямоугольного параллелепипеда и состоит из силового каркаса с закрепленными в нем параллельно друг другу верхней, нижней торцевых плат и двух промежуточных плат, расположенных между торцевыми платами, а на оптико-электронной системе в районе соединения бленды с оптическим блоком выполнен установочный фланец с крепежными отверстиями, при помощи которого оптико-электронная система жестко закреплена на промежуточной плате корпуса, расположенной между второй промежуточной платой и верхней торцевой платой, и на этой же плате жестко закреплены звездные датчики с выступанием за корпус микроспутника, а верхняя торцевая плата микроспутника расположена между установочным фланцем и торцом объектива оптико-электронной системы, при этом в промежуточной плате, контактирующей с установочным фланцем, и верхней торцевой плате выполнены вырезы под оптико-электронную систему, и на верхней торцевой плате вокруг выступающей части оптико-электронной системы установлен силовой пояс в виде, например, стержневой конструкции со шпангоутом, на котором расположены антенны и часть приборов оптико-электронной системы микроспутника, при этом на силовом каркасе в районах между торцевыми и промежуточными платами, а также между промежуточными платами установлены съемные панели, в некоторых из которых в этих же районах выполнены вырезы, часть из которых закрыта съемными крышками, при этом приборы служебной и целевой аппаратуры смонтированы на съемных панелях с вырезами и без них и съемных крышках съемных панелей, а на верхней и нижней торцевых платах со стороны одной из боковых панелей диаметрально противоположно смонтированы верхние и нижние узлы крепления и поворота панелей солнечных батарей, при этом светозащитная крышка с приводом ее открытия/закрытия установлена на торце оптической части оптико-электронной системы.
Заявляемый микроспутник поясняется чертежами, на которых показано:
фиг.1 - общий вид микроспутника со сложенными панелями солнечной батареи;
фиг.2 - вид на микроспутник со стороны верхней платы;
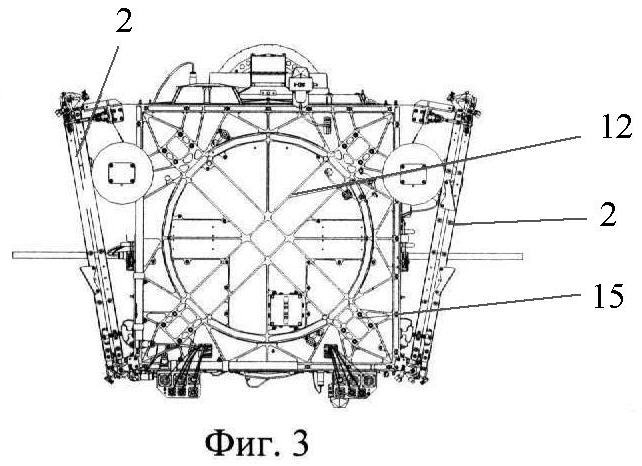
фиг.3 - вид на микроспутник со стороны нижней платы;
фиг.4 - объемный вид микроспутника со сложенными панелями солнечной батареи;
фиг.5 - объемный вид частично собранного каркаса микроспутника;
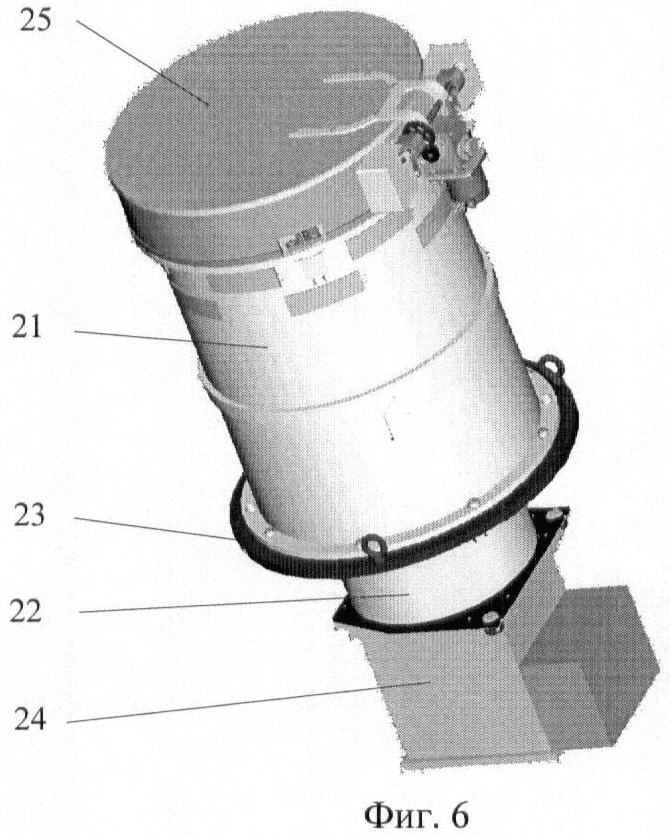
фиг.6 - объемный вид оптико-электронной системы;
фиг.7 - объемный вид промежуточной платы для установки оптико-электронной системы и оптических датчиков звездных координат;
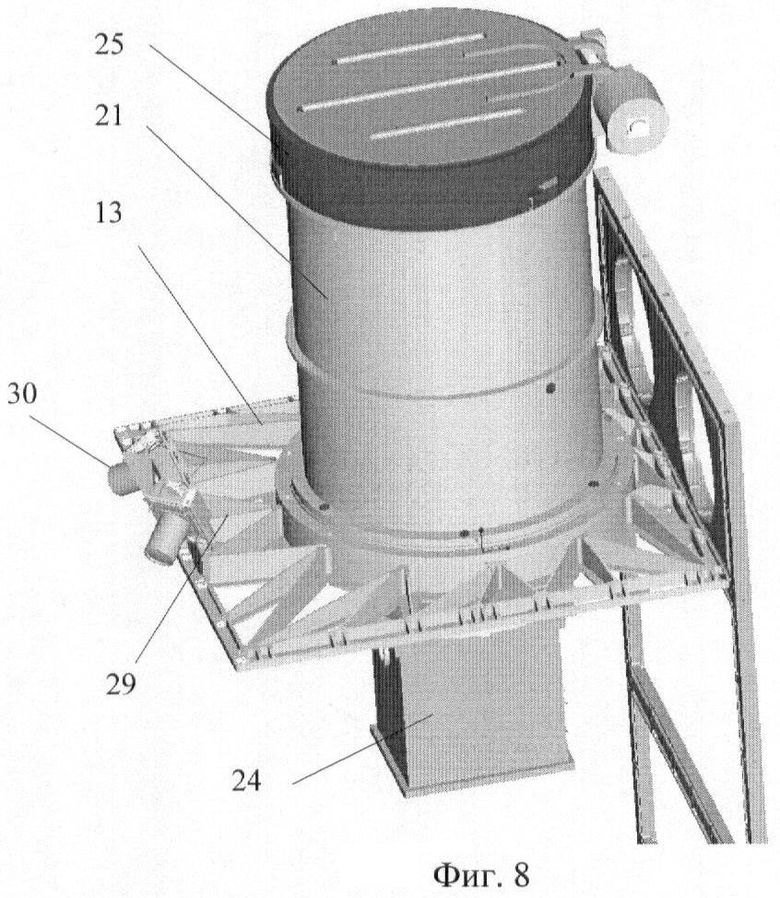
фиг.8 - установка оптико-электронной системы и оптических датчиков звездных координат на промежуточной плате микроспутника;
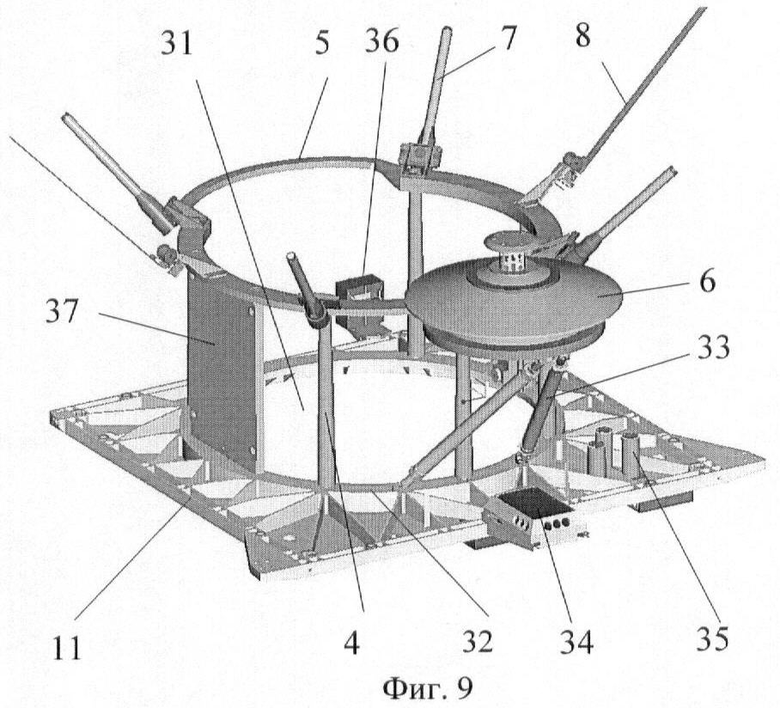
фиг.9 - объемный вид верхней торцевой платы микроспутника в сборе;
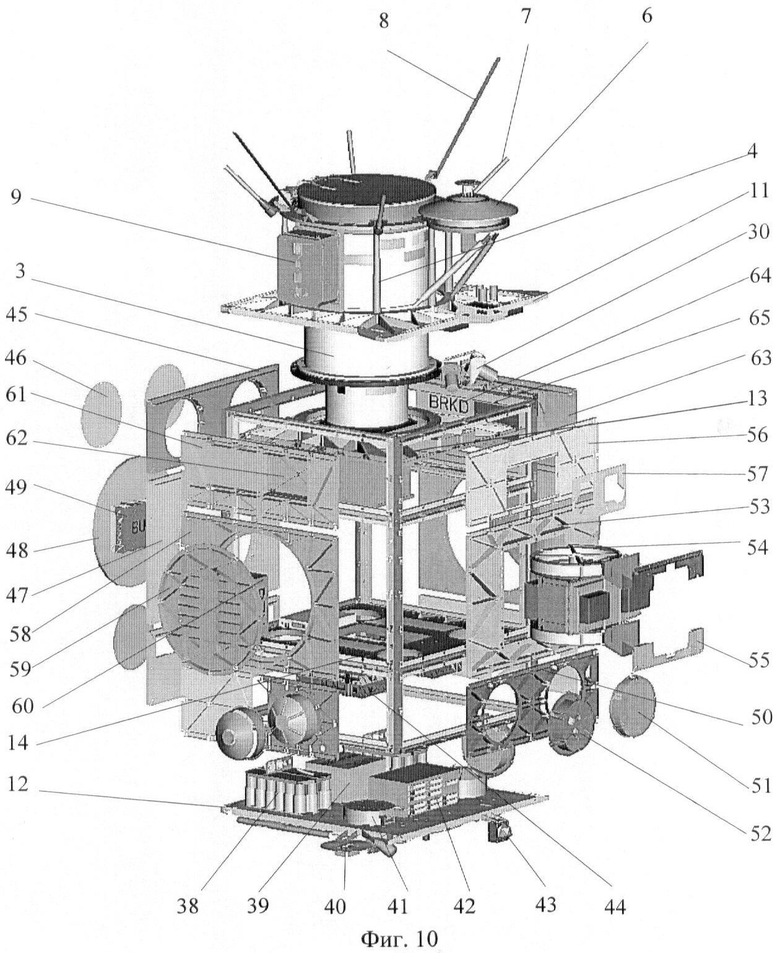
фиг.10 - конструктивно-технологическое членение микроспутника (без панелей солнечных батарей и некоторых приборов);
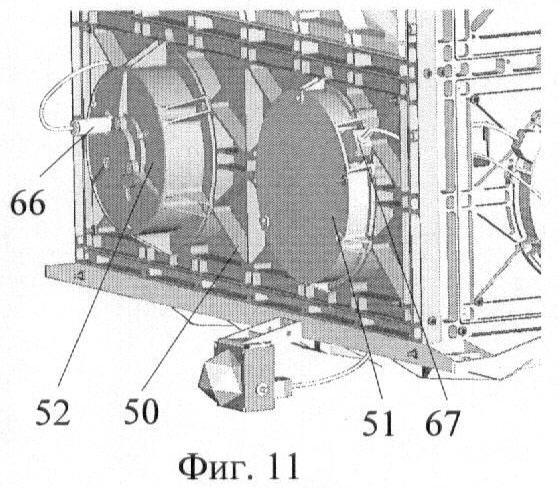
фиг.11 - установка управляющих двигателей-маховиков на съемных крышках съемной платы микроспутника;
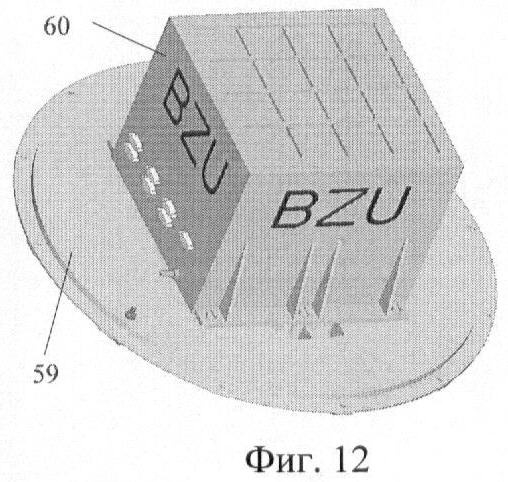
фиг.12 - установка прибора на съемной крышке съемной платы;
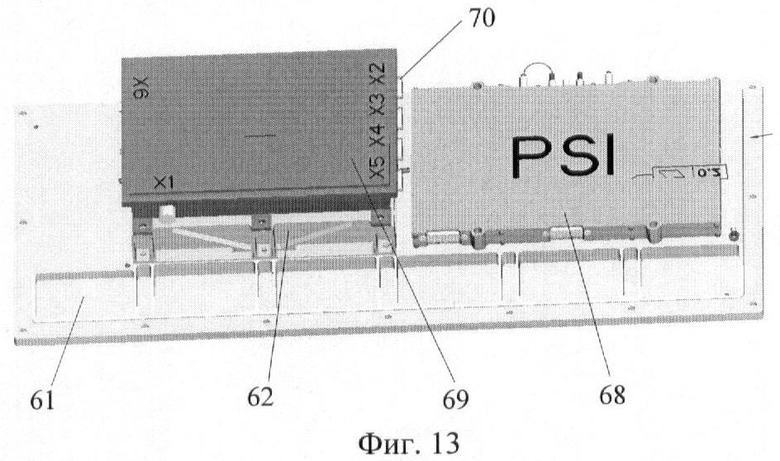
фиг.13 - установка приборов на съемной плате микроспутника;
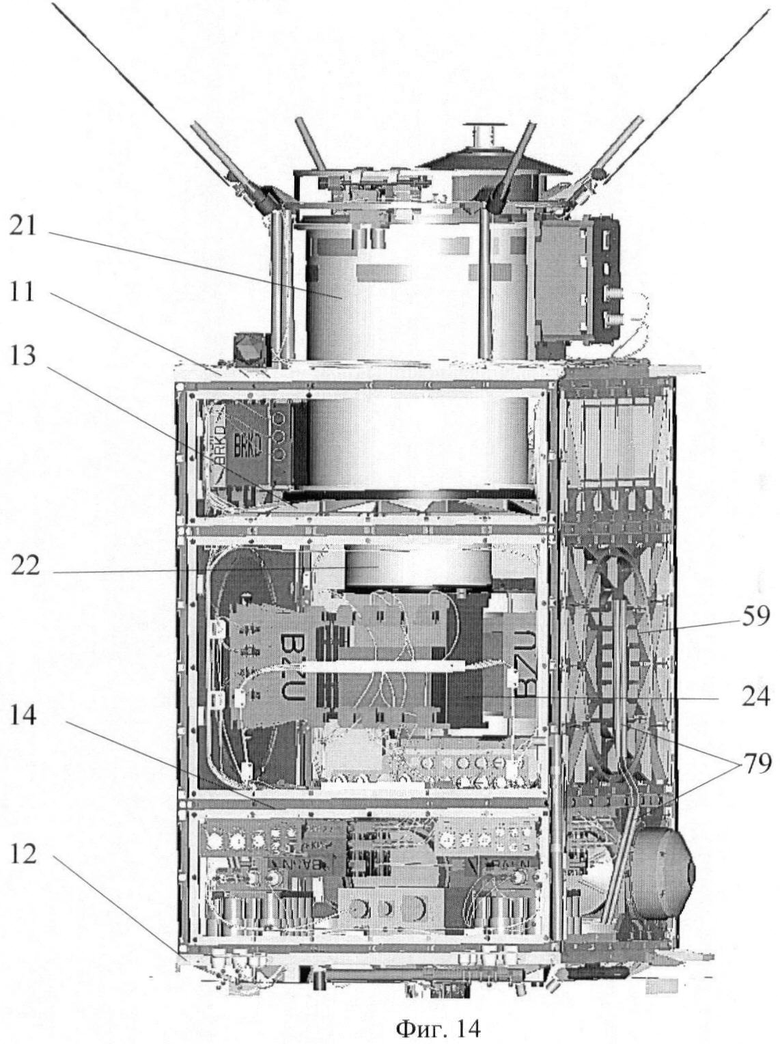
фиг.14 - установка оптико-электронной системы в микроспутнике;
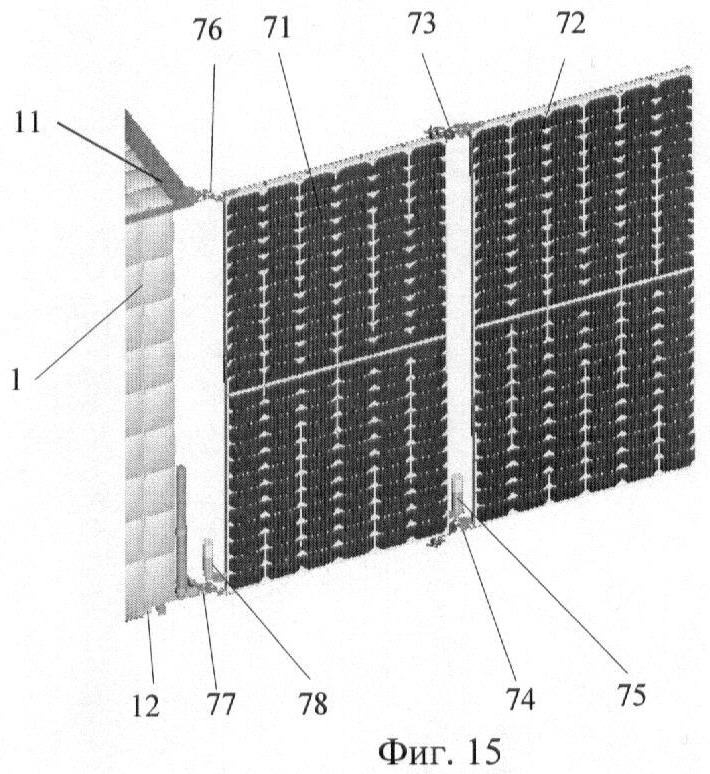
фиг.15 - установка панелей солнечных батарей на микроспутнике;
фиг.16 - установка тепловых труб.
Микроспутник содержит корпус 1 приборного блока в форме прямоугольного параллелепипеда, выполненный в виде силовых фрезерованных плат с установленными на них приборами целевой и служебной аппаратуры, установленную на корпусе 1 солнечную батарею 2, оптико-электронную систему 3, заглубленную в корпус 1. На верхнем торце корпуса 1 закреплены силовой пояс 4 с фланцем 5 и антенна 6 для передачи видеоизображения. На фланце 5 смонтированы четыре антенны 7 и две антенны 8 командной радиолинии микроспутника. На силовом поясе также установлен блок управления 9 с приводом открытия-закрытия светозащитной крышки оптико-электронной системы 3.
Корпус 1 приборного блока микроспутника состоит из силового каркаса 10 с закрепленными в нем параллельно друг другу верхней 11, нижней 12 торцевыми платами и двумя промежуточными платами 13, 14, расположенными между торцевыми платами. На нижней торцевой плате 12 расположены четыре узла 15 для стыковки с системой отделения микроспутника. Силовой каркас 10 состоит из соединенных между собой фрезерованных прямоугольных рамок-каркасов 16, 17, 18, 19, соединенных между собой, каждая их которых в плане разделена промежуточными перегородками (конструктивное исполнение показано на примере перегородки 20) на три окна. К верхним и нижним торцам рамок-каркасов крепятся верхняя 11 и нижняя 12 платы. К промежуточным перегородкам крепятся промежуточные платы 13, 14.
Оптико-электронная система 3 состоит из оптического модуля в составе бленды 21 и оптического блока 22, в районе стыка которых выполнен установочный фланец 23 с крепежными отверстиями. Оптический блок 22 состыкован с блоком аппаратуры 24 системы приема и преобразования информации. Объектив 21 оптико-электронной системы 3 закрыт светозащитной крышкой 25 с приводом открытия / закрытия крышки.
При помощи установочного фланца 23 с отверстиями оптико-электронная система 3 крепится к промежуточной плате 13. Для этого в промежуточной плате 13 выполнено отверстие 26 для размещения оптико-электронной системы и окантовка 27, в которой выполнены резьбовые отверстия 28. Кроме того, в промежуточной плате 13 выполнены посадочные места 29 под установку блока оптических датчиков звездных координат 30. Таким образом, блок оптических датчиков звездных координат 30, входящих в состав системы ориентации и стабилизации микроспутника и определяющих точность прицеливания оптико-электронной системы при проведении съемок поверхности Земли, установлены на одном жестком основании - промежуточной плате 13, что позволяет обеспечить высокую точность их взаимного положения и в итоге - высокую степень прицеливания оптико-электронной системы.
В верхней торцевой плате 11 также выполнено отверстие 31, размеры которого выбраны из условия размещения объектива 21 оптико-электронной системы 3. В окантовке 32 отверстия 31 установлен силовой пояс 4 с фланцем 5 для монтажа антенн 6, 7, 8. Антенна 6 дополнительно закреплена при помощи подкоса 33. На верхней торцевой плате смонтированы датчик Земли 34, магнитометры 35, солнечный датчик 36. На силовом поясе 4 для установки блока управления 9 приводом открытия-закрытия светозащитной крышки 25 оптико-электронной системы 3 жестко закреплена плата 37.
На торцевой плате 12 микроспутника расположены приборы: аккумуляторные батареи 38, бортовая вычислительная система 39, антенна 40, управляющие двигатели-маховики 41, комплекс управления системой электроснабжения 42, солнечный датчик 43.
На промежуточной плате 14 расположены приборы 44 бортового комплекса управления.
Приборы, устанавливаемые на боковых стенках силового каркаса 10, монтируются следующим образом.
Большинство окон рамок-каркасов 16, 17, 18, 19 закрыты съемными панелями с отверстиями в них, закрываемые (либо не закрываемыми) крышками.
Съемные панели с отверстиями выполняют следующие функции:
- все съемные панели со съемными крышками (с приборами на них или без приборов) обеспечивают доступ к приборам микроспутника, при этом:
- при снятии панелей обеспечивается полный доступ к приборам микроспутника;
- при снятии крышек с панелей обеспечивается частичный доступ к приборам микроспутника;
- часть приборов микроспутника устанавливается в съемных панелях с обеспечением выступания прибора за корпус микроспутника, крышки в этом случае отсутствуют;
- часть съемных панелей закрывают приборы, установленные на платах микроспутника, с обеспечением выступания прибора за корпус микроспутника;
- часть приборов устанавливается на съемных крышках панелей.
Рассмотрим примеры конструктивного исполнения съемных панелей с отверстиями в них.
Съемная панель 45 с крышками 46 служит для обеспечения доступа к приборам микроспутника.
Съемная панель 47 с крышкой 48 служит для обеспечения доступа к приборам микроспутника и для размещения прибора 49, входящего в состав системы ориентации и стабилизации.
Съемная панель 50 с крышками 51, 52 служит для обеспечения доступа к приборам микроспутника и для размещения управляющих двигателей-маховиков (на фиг.10 не показаны), входящих в состав системы ориентации и стабилизации. Аналогично крепятся и другие двигатели-маховики.
В съемной панели 53 установлена двигательная установка 54 для решения задач орбитального маневрирования микроспутника. Свободные места в зоне выступания двигательной установки закрыты крышкой 55. В зоне установки оптических датчиков звездных координат 30 на плате 13 смонтирована съемная крышка 56 с вырезом. Свободные места в зоне выступания датчиков закрыты крышкой 57. Съемная плата 58 служит для обеспечения доступа к приборам микроспутника и в ней смонтирована съемная крышка 59 с прибором 60, являющимся запоминающим устройством целевой информации. С противоположной стороны смонтирована аналогичная плата с аналогичными крышкой и прибором. Наружные поверхности крышек 59 являются теплоотводящими поверхностями. Рассмотрим примеры конструктивного исполнения съемных панелей без отверстий в них.
Два окна рамок-каркасов 16, 17, 18, 19, расположенные между верхней торцевой панелью 11 и промежуточной платой 13, закрыты съемными панелями с глухими карманами с донышками, утопленными внутрь микроспутника. На донышках смонтированы приборы микроспутника.
Например, в плате 61 выполнен глухой выступающий во внутреннюю полость корпуса микроспутника карман 62 с донышком, на котором установлен прибор (на фиг.10 не показан). Непосредственно на плате 61 рядом с карманом также смонтирован прибор (на фиг.10 не показан). Аналогичная плата 63 с приборами 64, 65 установлена диаметрально противоположно.
В крышках 51, 52 установлены двигатели-маховики 66, 67 (на фиг.11 показаны разъемы двигателей-маховиков).
В плате 61 смонтирован прибор 68 и прибор 69 на кармане 62. Такая ступенчатая установка приборов 68, 69 обеспечивает доступ к разъемам приборов, например к разъемам 70 прибора 69 (фиг.12).
Солнечная батарея 2 состоит из четырех панелей. Особенности крепления солнечной батареи рассмотрим на примере панелей 71,72, расположенных по одну из сторон корпуса 1 микроспутника. По другую сторону расположены аналогичные две панели солнечной батареи.
Панели 71, 72 соединены между собой шарнирными узлами 73, 74. Для их относительного поворота служит электропривод 75. Панели 71, 72 крепятся к корпусу 1 при помощи шарнирных узлов 76, 77, установленных на торцевых платах 11, 12 микроспутника. Для поворота панелей служит электропривод 78.
Отвод тепла от наиболее теплонагруженной платы 12 осуществляется тепловыми трубами 79 на радиационные поверхности 80, образованные на крышках 59.
Рассмотрим особенности функционирования заявляемого микроспутника и его эффективность по сравнению со спутником-прототипом.
При компоновке микроспутника используется метод проектирования - метод совмещения функций, при котором оптико-электронная система заглубляется в приборный блок микроспутника, и ее тепловой режим обеспечивается средствами как самой системы, так и средствами микроспутника.
Длина и ширина корпуса микроспутника определяется размерами и компоновкой приборов. Так, размеры приборов 44, 38, 39, 41, 42 определяют размеры отсека, образованного нижней платой 12, промежуточной платой 14 и частью силового каркаса 10. Расстояние между промежуточными платами 13, 14 определяется габаритами части оптико-электронной системы 3 от стыковочного фланца 23 до торца блока аппаратуры 22 системы приема и преобразования информации с учетом габаритов приборов, устанавливаемых на боковых стенках силового каркаса 10. Расстояние между платами 11 и 13 определяется габаритами приборов, устанавливаемых на боковых стенках силового каркаса 10.
Выбором положения стыковочного фланца 23 обеспечивается высокая плотность компоновки микроспутника и расположение оптического блока 22 и блока аппаратуры 24 системы приема и преобразования информации в объеме, ограниченном промежуточными платами 13, 14. Как правило, на стыковочном фланце 23 должна быть обеспечена плюсовая температура, например, в пределах от 0°С до 35°С. Поэтому выбор конкретных приборов для установки в данном объеме определяется с учетом их тепловыделения и тепловыделения блока аппаратуры 24 системы приема и преобразования информации, обеспечивающих заданный тепловой баланс.
В объеме, ограниченном верхней торцевой платой 11 и промежуточной платой 13, расположены приборы с большим энергопотреблением, например передатчики целевой информации и часть объектива 21 оптико-электронной системы. Такой подход обеспечивает заданный тепловой режим объектива 21, поскольку он наиболее подвержен охлаждению, особенно во время съемки Земли с открытой светозащитной крышкой 25. В качестве дополнительных источников подогрева оптического модуля оптико-электронной системы 3 используются электронагреватели (на чертеже не показаны). Кроме того, светозащитная крышка 25 выполняет двойную роль. Во-первых, она исключает засветку прямыми солнечными лучами оптико-электронной системы, а во-вторых, крышка играет защитную тепловую роль и способствует незамерзанию оптико-электронной системы. Установка светозащитной крышки на торце оптической части оптико-электронной системы сокращает габариты и массу крышки, обеспечивает точность закрытия торца объектива оптико-электронной системы и автономность наземной экспериментальной отработки всей оптико-электронной системы.
Высота силового пояса 4 определяется высотой устанавливаемых на нем приборов, в частности блока управления 9 приводом открытия-закрытия светозащитной крышки оптико-электронной системы 3. Расположение силового пояса вокруг объектива 21 позволяет установить на него теплоизоляцию (не показана) для обеспечения тепловых режимов оптико-электронной системы 3.
В объеме, ограниченном нижней торцевой платой 12 и промежуточной платой 14, расположены приборы с повышенным энергопотреблением, например аккумуляторные батареи 38, бортовая вычислительная система 39, управляющие двигатели-маховики 41, комплекс управления системой электроснабжения 42, приборы 44 бортового комплекса управления. В этом объеме наиболее теплонагруженной является нижняя торцевая плата 12, отвод тепла от которой осуществляется тепловыми трубами 79 на радиационные поверхности 80, образованные на крышках 59.
Таким образом, микроспутник торцевыми 11, 12 и промежуточными 13, 14 платами разделен на три отсека, в каждом из которых монтируются приборы с учетом обеспечения общего теплового баланса. При этом обеспечивается температурный режим оптико-электронной системы 3 с максимальным снижением температурных (и вибрационных) линейных деформаций, исключающий расфокусировку как оптической части 21, 22, так и системы приема и преобразования информации 24. Это достигается размещением оптико-электронной системы во внутренней полости микроспутника с практически постоянной температурой, близкой к температуре юстировки оптико-электронной системы, и закреплением ее на жесткой плате 13 при помощи фланца 23, расположенного в средней части оптико-электронной системы.
Съемные панели и крышки в отсеках обеспечивают удобство сборки (разборки) микроспутника. Замена при необходимости прибора на новый или в случае изменения его размеров осуществляется путем изготовления новой съемной платы или только съемной крышки при минимальных экономических и временных затратах.
Для обеспечения надежности процесса открытия панелей солнечных батарей 71, 72 приводами 75, 78 необходимо снижать момент сопротивления, который определяется моментом сопротивления от кабельной сети между панелями и моментом сопротивления в корневых шарнирных узлах 76, 77 и шарнирных узлах 73, 74. Поскольку шарнирные узлы 76, 77 закреплены на одном силовом каркасе 10, состоящем из соединенных между собой фрезерованных прямоугольных рамок-каркасов 16, 17, 18, 19, то обеспечивается высокая точность их выставки и минимальные моменты сопротивления. Выполнение корпуса 10 микроспутника в виде прямоугольного параллелепипеда позволяет минимизировать количество панелей солнечной батареи. На практике для подобных микроспутников достаточно 4 панели солнечной батареи, что также способствует повышению надежности их открытия/закрытия и снижению общей массы. Установка микроспутника на адаптер при реализации группового или попутного запуска осуществляется при помощи четырех узлов 15, обеспечивающих стыковку микроспутника с системой отделения. Установка блока оптических датчиков звездных координат 30, входящих в систему ориентации и стабилизации микроспутника и определяющих точность его углового положения, и оптико-электронной системы 3 на одну промежуточную плату 13 обеспечивает стабильность взаимного положения их оптических осей на всех этапах эксплуатации за счет жесткости платы 13, что обеспечивает точность проведения съемки поверхности Земли.
Таким образом, заявляемый микроспутник по сравнению со спутником-прототипом обеспечивает:
- сокращение общей длины микроспутника до 24-25% и снижение массы конструкции до 15-18%;
- поперечные размеры для предлагаемой компоновки микроспутника увеличиваются незначительно либо остаются прежними; для приведенного в качестве примера микроспутника на нижней плате 12 расположены приборы, габариты которых по сути и определяют поперечные размеры платы 12 и самого микроспутника; при этом длина самого приборного блока за счет заглубления в него оптико-электронной системы увеличится примерно на 20-22%, а общая длина микроспутника уменьшится на 24-25%; при длине оптико-электронной системы в 1000 мм, потребной длине приборного блока 820 мм абсолютное снижение длины микроспутника составит примерно 450 мм, при этом длина самого приборного блока увеличится примерно на 220 мм;
- запуск заявляемого микроспутника как правило осуществляется либо попутным, либо групповым способом; при установке микроспутника на адаптер используются четыре узла 15 системы отделения, расположенные на плате 12; в микроспутнике-прототипе используются шесть аналогичных узлов; сокращение массы и длины микроспутника при незначительном увеличении поперечных габаритов микроспутника, а также сокращение узлов стыковки с системой отделения в большинстве случаев значительно упрощает адаптацию микроспутника к ракете-носителю при реализации группового или попутного запуска и повышает надежность его отделения;
- размещением оптико-электронной системы во внутренней полости микроспутника с практически постоянной температурой, близкой к температуре юстировки оптико-электронной системы, и закреплением ее на жесткой плате 13 при помощи фланца 23, расположенного в средней части оптико-электронной системы, обеспечивается заданный температурный режим оптико-электронной системы 3 с максимальным снижением температурных (и вибрационных) линейных деформаций, исключающий расфокусировку как оптической части 21, 22, так и системы приема и преобразования информации 24; для этих же целей служит силовой пояс, расположенный вокруг объектива 21, на который устанавливается теплоизоляция (не показана) и установка непосредственно на торец объектива светозащитной крышки;
- обеспечивается точность взаимного положения оптико-электронной системы и блока оптических датчиков звездных координат, что в свою очередь повышает точность проведения съемки поверхности Земли;
- использованием съемных панелей и крышек в них обеспечивает сборку/разборку КА с использованием простых технологических приемов без использования сложной технологической оснастки, что повышает технологичность микроспутника и улучшает его эксплуатационные свойства;
- выполнение корпуса 10 микроспутника в виде прямоугольного параллелепипеда позволяет снизить количество панелей солнечной батареи с 6 для спутника-прототипа до 4, что способствует повышению надежности их открытия/закрытия и снижению общей массы;
- закрепление шарнирных узлов 76, 77 на одном силовом каркасе 10, состоящем из соединенных между собой фрезерованных прямоугольных рамок-каркасов 16, 17, 18, 19, обеспечивает высокую точность их выставки и минимальные моменты сопротивления для привода открытия/закрытия панелей солнечной батареи.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОСМИЧЕСКАЯ ПЛАТФОРМА | 2008 |
|
RU2376212C1 |
| Космический аппарат дистанционного зондирования Земли микрокласса | 2017 |
|
RU2651309C1 |
| НАНОСПУТНИК | 2005 |
|
RU2308401C2 |
| МИКРОСПУТНИК | 2004 |
|
RU2268205C2 |
| МИНИ-СПУТНИК ДЛЯ ГРУППОВОГО И ПОПУТНОГО ЗАПУСКОВ | 2005 |
|
RU2293688C1 |
| СЛУЖЕБНЫЙ БЛОК КОСМИЧЕСКОЙ ПЛАТФОРМЫ | 2024 |
|
RU2831970C1 |
| АДАПТЕР ДЛЯ ПОПУТНОГО ВЫВЕДЕНИЯ ПОЛЕЗНЫХ НАГРУЗОК | 2016 |
|
RU2624959C1 |
| МНОГОЦЕЛЕВАЯ СЛУЖЕБНАЯ ПЛАТФОРМА ДЛЯ СОЗДАНИЯ КОСМИЧЕСКИХ АППАРАТОВ | 2008 |
|
RU2375267C1 |
| МИКРОСПУТНИК | 2014 |
|
RU2572365C1 |
| КОСМИЧЕСКИЙ АППАРАТ, ЕГО МОДУЛЬ ПОЛЕЗНОЙ НАГРУЗКИ И МОДУЛЬ СЛУЖЕБНЫХ СИСТЕМ | 2016 |
|
RU2617162C1 |





Изобретение относится к космическим аппаратам, в частности к микроспутникам для съемки поверхности Земли и передачи изображения. Корпус микроспутника выполнен в виде прямоугольного параллелепипеда и состоит из силового каркаса с закрепленными в нем параллельно друг другу верхней и нижней торцевыми платами и двумя промежуточными платами. На оптико-электронной системе в районе соединения бленды с оптическим блоком выполнен установочный фланец с крепежными отверстиями, при помощи которого оптико-электронная система жестко закреплена на промежуточной плате. На этой же промежуточной плате жестко закреплены звездные датчики с выступанием за корпус. Верхняя торцевая плата расположена между установочным фланцем и торцом объектива оптико-электронной системы. В промежуточной плате, контактирующей с установочным фланцем, и в верхней торцевой плате выполнены вырезы под оптико-электронную систему. На торце оптической части оптико-электронной системы установлена светозащитная крышка с приводом ее открытия/закрытия. На верхней торцевой плате вокруг выступающей части оптико-электронной системы установлен силовой пояс, на котором расположены антенны и часть приборов оптико-электронной системы. На силовом каркасе в районах между торцевыми и промежуточными платами, а также между промежуточными платами установлены съемные панели с вырезами. Вырезы закрываются съемными крышками. Приборы служебной и целевой аппаратуры смонтированы на съемных панелях и съемных крышках. Достигается улучшение тактико-технических, технологических и эксплуатационных характеристик микроспутника. 16 ил.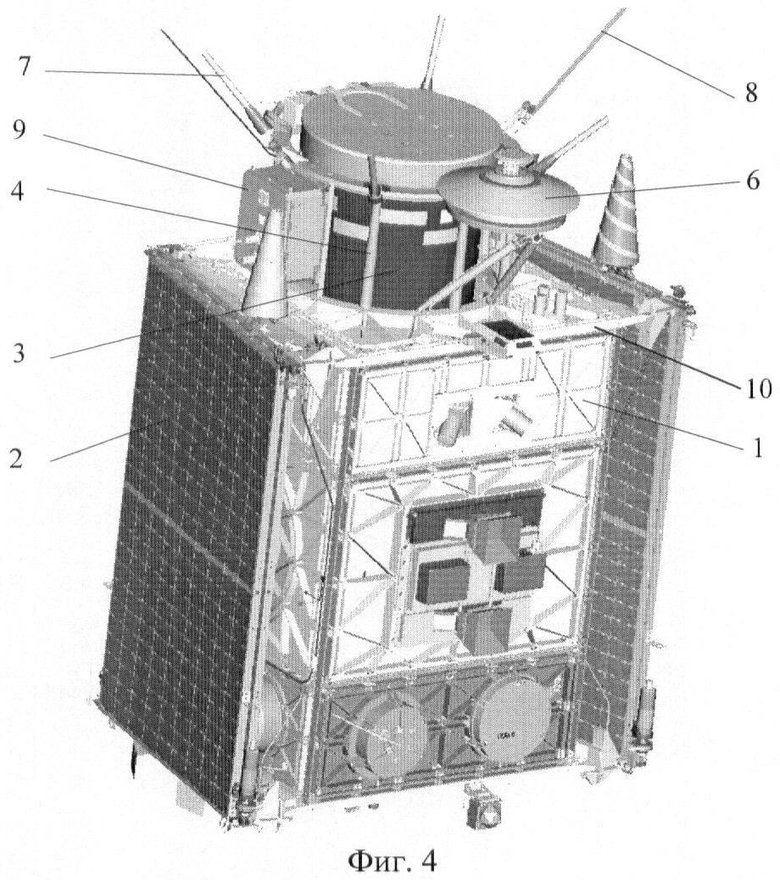
Микроспутник для дистанционного зондирования поверхности Земли, содержащий корпус, выполненный из соединенных между собой боковых, верхней и нижней торцевых плат, продольная ось которого перпендикулярна торцевым платам корпуса, на нижней из которых выполнены узлы соединения микроспутника с системой отделения, смонтированные на корпусе при помощи верхнего и нижнего узлов крепления и поворота, раскрываемые панели солнечной батареи, установленные внутри корпуса на платах приборы целевой и служебной аппаратуры, включая звездные датчики, установленную на корпусе оптико-электронную систему для съемки поверхности Земли в виде последовательно соединенных между собой цилиндрической бленды, оптического блока и блока аппаратуры системы приема и преобразования информации, продольная ось которой перпендикулярна нижней торцевой плате корпуса и соосна с продольной осью микроспутника, расположенный вокруг оптико-электронной системы силовой пояс, соединенный с корпусом, с установленными на нем приборами микроспутника, смонтированную у торца оптико-электронной системы светозащитную крышку, отличающийся тем, что корпус микроспутника выполнен в виде прямоугольного параллелепипеда и состоит из силового каркаса с закрепленными в нем параллельно друг другу верхней, нижней торцевыми платами и двумя промежуточными платами, расположенными между торцевыми платами, а на оптико-электронной системе в районе соединения бленды с оптическим блоком выполнен установочный фланец с крепежными отверстиями, при помощи которого оптико-электронная система жестко закреплена на промежуточной плате корпуса, расположенной между второй промежуточной платой и верхней торцевой платой, и на этой же плате жестко закреплены звездные датчики с выступанием за корпус микроспутника, а верхняя торцевая плата микроспутника расположена между установочным фланцем и торцом объектива оптико-электронной системы, при этом в промежуточной плате, контактирующей с установочным фланцем, и верхней торцевой плате выполнены вырезы под оптико-электронную систему, и на верхней торцевой плате вокруг выступающей части оптико-электронной системы установлен силовой пояс в виде, например, стержневой конструкции со шпангоутом, на котором расположены антенны и часть приборов оптико-электронной системы микроспутника, при этом на силовом каркасе в районах между торцевыми и промежуточными платами, а также между промежуточными платами установлены съемные панели, в некоторых из которых в этих же районах выполнены вырезы, часть из которых закрыта съемными крышками, при этом приборы служебной и целевой аппаратуры смонтированы на съемных панелях с вырезами и без них и съемных крышках съемных панелей, а на верхней и нижней торцевых платах со стороны одной из боковых панелей диаметрально противоположно смонтированы верхние и нижние узлы крепления и поворота панелей солнечных батарей, при этом светозащитная крышка с приводом ее открытия/закрытия установлена на торце оптической части оптико-электронной системы.
| КОСМИЧЕСКИЙ АППАРАТ БЛОЧНО-МОДУЛЬНОГО ИСПОЛНЕНИЯ | 1995 |
|
RU2092398C1 |
| НАНОСПУТНИК | 2005 |
|
RU2308401C2 |
| Блок радиоэлектронный с воздушным охлаждением | 2023 |
|
RU2812271C1 |
| CN 101850852 A, 06.10.2010 | |||
| WO 2009150081 A1, 17.12.2009. | |||

