Перекрестная ссылка на родственные заявки
[01] По этой заявке испрашивается преимущество приоритета заявки №61/552812 на патент США под названием «Modified Everitt-Jennings with dual iteration on the damping factors and adaptation to deviated wells by including Coulombs friction», поданной 28 октября 2011 г.; заявки №61/598438 под названием «Modified Everitt-Jennings with dual iteration on the damping factors», поданной 14 февраля 2012 г.; заявки №61/605325 под названием «Implementing Coulombs friction for the calculation of downhole cards in deviated wells», поданной 1 марта 2012 года, и заявки № 61/706489 под названием «Iterating on damping when solving the wave equation and computation on fluid load lines and concavity testing», поданной 27 сентября 2012 г., каждая из которых полностью включена в эту заявку путем ссылки. Кроме того, эта заявка подана одновременно с совместно рассматриваемыми заявками (205-0322US1) под названием «Fluid load line calculation and concavity test for downhole pump card», (205-0322US2) под названием «Calculating downhole pump card with iteration on single damping factor» и (205-0322US3) под названием «Calculating downhole pump card with iterations on dual damping factors», каждая из которых включена в эту заявку путем ссылки.
Предпосылки создания раскрытия
А. Штанговая насосная система
[02] Насосные системы с возвратно-поступательным движением, такие как штанговые насосные системы, извлекают флюиды из скважины, и в них используется скважинный насос, соединенный с приводным источником на поверхности. Колонна насосных штанг соединяет наземный приводной источник со скважинным насосом в скважине. При работе источник возбуждения циклически поднимает и опускает штанги скважинного насоса, и при каждом ходе скважинный насос поднимает скважинные флюиды к поверхности.
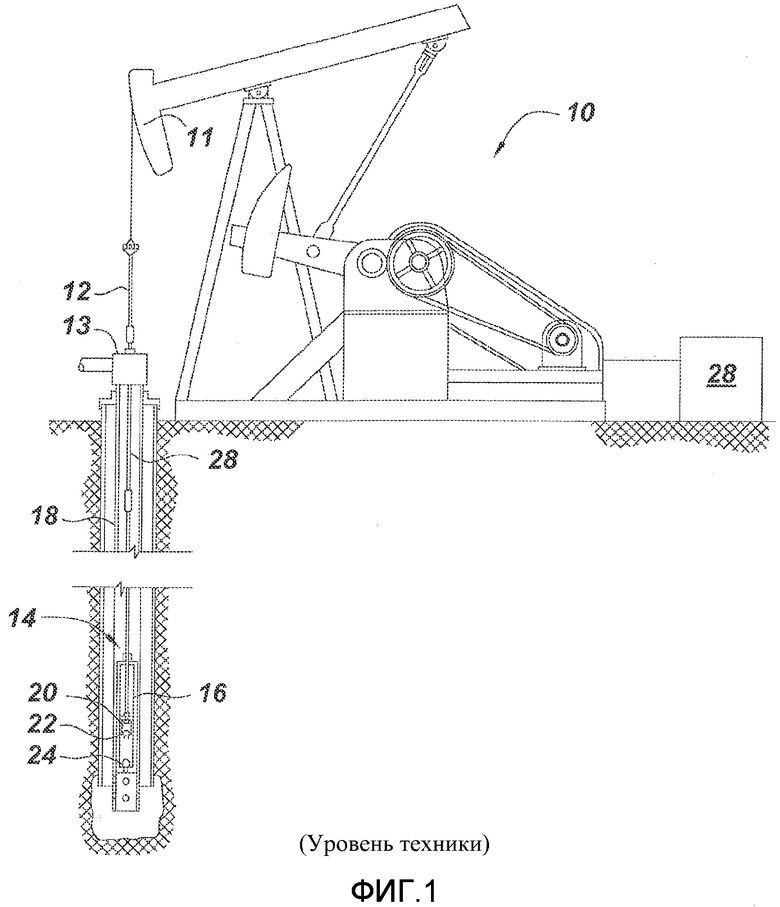
[03] На фиг.1 показана для примера штанговая насосная система 10, используемая для добычи флюида из скважины. Скважинный насос 14 имеет цилиндр 16 с всасывающим клапаном 24, расположенным внизу. Всасывающий клапан 24 позволяет флюиду входить из буровой скважины, но не позволяет выходить флюиду. Внутри цилиндра 16 насоса плунжер 20 имеет нагнетательный клапан 22, расположенный наверху. Нагнетательный клапан 22 позволяет флюиду перемещаться снизу от плунжера 20 вверх в насосно-компрессорную колонну 18, но не позволяет флюиду возвращаться из насосно-компрессорной колонны 18 в цилиндр 16 насоса ниже плунжера 20. Приводной источник (например, станок-качалка 11) на поверхности соединен колонной 12 насосных штанг с плунжером 20 и перемещает плунжер 20 вверх и вниз циклически при движениях вверх и движениях вниз.
[04] Во время хода вверх нагнетательный клапан 22 закрывается, и любой флюид выше плунжера 20 в насосно-компрессорной колонне 18 поднимается к поверхности. Тем временем всасывающий клапан 24 открывается и позволяет флюиду входить в цилиндр 16 насоса из буровой скважины. Наивысшую точку движения плунжера обычно называют «верхней точкой хода» (TOS), тогда как самую низкую точку движения плунжера обычно называют «нижней точкой хода» (BOS).
[05] В верхней точке хода всасывающий клапан 24 закрывается и удерживает флюид, который вошел в цилиндр 16 насоса. В дополнение к этому в верхней точке хода масса флюида в насосно-компрессорной колонне 18 поддерживается нагнетательным клапаном 22 в плунжере 20 и, следовательно, также и колонной 12 насосных штанг, что вызывает растяжение колонны 12 насосных штанг.
[06] Во время хода вниз нагнетательный клапан 22 сначала остается закрытым до тех пор, пока плунжер 20 не достигает поверхности флюида в цилиндре 16. Ниже нагнетательного клапана 22 создается давление, достаточное для выравнивания давления. При возрастании давления в цилиндре 16 насоса снижается нагрузка на колонну 12 насосных штанг, так что напряжение колонны 12 насосных штанг уменьшается.
[07] Этот процесс происходит в течение ограниченного времени, когда плунжер 20 покоится на флюиде, а станок-качалка 11 на поверхности обеспечивает движение вниз верхней части колонны 12 насосных штанг. Положение плунжера 20 насоса в этот момент времени известно как «точка перехода», поскольку нагрузка столбом флюида в насосно-компрессорной колонне 18 переходит от нагнетательного клапана 22 к всасывающему клапану 24. Это приводит к быстрому снижению нагрузки на колонну 12 насосных штанг во время перехода.
[08] После выравнивания давления нагнетательный клапан 22 открывается, и плунжер 20 продолжает движение вниз до самого нижнего положения (то есть до нижней точки хода). Движение плунжера 20 от точки перехода к нижней точке хода известно как «ход флюида» и является мерой количества флюида, поднимаемого насосом 14 при каждом ходе. Иначе говоря, часть хода плунжера насоса ниже точки перехода можно интерпретировать как процент хода плунжера насоса, при котором удерживается флюид, и этот процент соответствует наполняемости насоса. Поэтому точку перехода можно вычислить при использовании подсчета наполняемости насоса.
[09] Если в буровой скважине находится достаточное количество флюида, цилиндр 16 насоса может полностью заполняться флюидов в продолжение хода вверх. Все же при некоторых условиях насос 14 может не полностью заполняться флюидом при ходе вверх, вследствие чего может оставаться пустое пространство между флюидом и плунжером 20, когда он продолжает подниматься. Работа насосной системы 10 с только частично заполняемым цилиндром 16 является неэффективной и, следовательно, нежелательной. В этом случае о скважине говорят, что она «откачана», а это состояние известно как «удары плунжера о дно цилиндра», при которых могут повреждаться различные компоненты насосной системы. В случае откачанной скважины наиболее вероятно, что точка перехода будет наблюдаться после верхней точки хода плунжера 20.
[10] Обычно датчики для измерения условий возле скважинного насоса 14, который может быть расположен под землей на глубине нескольких тысяч футов, отсутствуют. Вместо них используют численные способы для вычисления положения плунжера 20 насоса и нагрузки, действующей на плунжер 20, на основании измерений положения колонны 12 насосных штанг и нагрузки на нее около станка-качалки 11, расположенного на поверхности. Эти измерения обычно выполняют в верхней части полированного штока 28, который является частью колонны 12 насосных штанг, проходящей через сальниковую коробку 13 в устье скважины. Контроллер 26 насоса используют для мониторинга насосной системы 10 и управления ею.
[11] Для эффективного управления насосной системой 10 с возвратно-поступательным движением и исключения дорогого технического обслуживания контроллер 26 штангового насоса может собирать системные данные и соответственно корректировать рабочие параметры системы 10. Обычно контроллер 26 штангового насоса собирает такие системные данные, как нагрузка и перемещение колонны насосных штанг, путем измерения этих свойств на поверхности. Хотя этими измеряемыми на поверхности данными предоставляется полезная диагностическая информация, они не дают точного представления относительно некоторых свойств, наблюдаемых в скважине возле насоса. Поскольку эти скважинные свойства невозможно без труда измерять непосредственно, их обычно вычисляют на основании измеряемых на поверхности свойств.
[12] В способах определения рабочих характеристик скважинного насоса 20 используют форму графического представления скважинных данных для вычисления различных деталей. Например, в патенте США №5252031 (Gibbs) под названием «Monitoring and pump-off control with downhole pump cards» изложен способ мониторинга снабженной штанговым насосом скважины для обнаружения различных проблем, связанных с насосом, с использованием измерений, выполняемых на поверхности, для образования диаграммы скважинного насоса. В таком случае представленную графически диаграмму скважинного насоса можно использовать для обнаружения различных проблем, связанных с насосом, и управления насосной установкой. Другие способы определения рабочих характеристик раскрыты в публикациях №2011/0091332 и №2011/0091335 заявок на патенты США, которые полностью включены в эту заявку путем ссылки.
В. Способ Эверитта-Дженнингса
[13] В способах определения рабочих характеристик штанговой насосной системы 10, показанной выше, при анализе с помощью программного обеспечения вычисляют скважинные данные (то есть диаграмму насоса) с использованием данных о положении и нагрузке, измеряемых на поверхности. В наиболее точных и популярных из этих способов вычисляют скважинную диаграмму на основании наземных данных путем решения одномерного уравнения затухающей волны, в котором используют положение поверхности и нагрузку, регистрируемые на поверхности.
[14] Существуют различные алгоритмы для решения волнового уравнения. Снайдер решил волновое уравнение, используя способ характеристик. См. Snyder W.E., «A method for computing down-hole forces and displacements in oil wells pumped with sucker rods», Paper 851-37-K, 1963. Гиббс использовал разделение переменных и ряд Фурье, и его способ может быть назван «способом Гиббса». См. Gibbs S.G. et al., «Computer diagnosis of down-hole conditions in sucker rod pumping wells», JPT (Jan. 1966) 91-98; Trans., AIME, 237; Gibbs S.G., «A review of methods for design and analysis of rod pumping installations», SPE 9980, 1982; и патент США № 3343409.
[15] В 1969 г. Кнапп применил конечные разности для решения волнового уравнения. См. Knapp R.M., «A dynamic investigation of sucker-rod-pumping», MS thesis, U. of Kansas, Topeka (Jan. 1969). Этот же способ использовали Эверитт и Дженнингс. См. Everitt T.A. and Jennings J.W., «An improved finite-difference calculation of downhole dynamometer cards for sucker-rod pumps», SPE 18189, 1992; и Pons-Ehimeakhe V., «Modified Everitt-Jennings algorithm with dual iteration on the damping factors», 2012 Southwestern Petroleum Short Course. Кроме того, способ Эверитта-Дженнингса был реализован и модифицирован компанией Weatherford International. См. Ehimeakhe V., «Comparative study of downhole cards using modified Everitt-Jennings method and Gibbs method», Southwestern Petroleum Short Course 2010.
[16] Для решения одномерного волнового уравнения в способе Эверитта-Дженнингса используются конечные разности. Колонну насосных штанг разделяют на М конечно-разностных узлов длиной Li (фут), плотностью ρi (фунт·м/фут3) площадью Ai (дюйм2). Если мы допустим, что u=u(x,t) представляет собой перемещение положения x в момент t времени в штанговой насосной системе, то сконденсированное одномерное волновое уравнение будет выражаться как:


[17] где скорость акустической волны имеет вид 
[18] Первую и вторую производную по времени заменяют разностями вперед первого порядка точности и центральными разностями второго порядка точности. Вторую производную по положению заменяют несколько перегруппированной центральной разностью второго порядка точности.
[19] В способе коэффициент D затухания выбирается автоматически при использовании итерации относительно истинного хода (NS) и коэффициента D затухания. Коэффициент D затухания можно вычислить в соответствии с уравнением:

[20] где HPR - мощность полированного штока (в лошадиных силах), S - истинный ход (в дюймах), τ - период одного хода (в секундах), а гидравлическую мощность - HHYD (в лошадиных силах) получают согласно
HHYD=(7,36·10-6)QγFl,
где Q - производительность насоса (в баррелях в сутки), γ - удельная плотность флюида и Fl - уровень флюида (в футах). Производительность насоса имеет вид:
Q=(0,1166)(SPM)Sd2,
где SPM - число качаний насосной установки в ходах в минуту, а d является диаметром плунжера.
[21] Дополнительные подробности относительно получения коэффициента D затухания из уравнения (2) и алгоритма исходной итерации относительно истинного хода и коэффициента затухания приведены в Everitt T.A. and Jennings J.W., «An improved finite-difference calculation of downhole dynamometer cards for sucker-rod pumps», SPE 18189, 1992.
[22] В модифицированном способе Эверитта-Дженнингса также используются конечные разности для решения волнового уравнения. Как и ранее, колонну насосных штанг разбивают на М конечно-разностных элементов, а положение и нагрузку (включая напряжение) вычисляют на каждом шаге вниз по буровой скважине. Затем, как показано на фиг. 2, итерацию выполняют относительно истинного хода и коэффициента затухания, при этом для каждого хода коэффициент затухания выбирается автоматически.
[23] Сначала волновое уравнение решают, чтобы вычислить скважинную диаграмму с использованием наземных измерений, а начальный коэффициент D затухания полагают равным 0,5 (блок 42). Начальный истинный ход S0 определяют из вычисленной диаграммы, а уровень флюида в скважине вычисляют (блок 44). На этой стадии новый коэффициент D затухания вычисляют из уравнения (2) (блок 46) и т.д., и скважинную диаграмму опять вычисляют с учетом нового коэффициента D затухания (блок 48). На основании пересчитанной скважинной диаграммы определяют новый истинный ход S (блок 50).
[24] Затем на этой стадии проверяют, находится ли вновь определенный истинный S вблизи начального или предшествующего истинного хода в пределах некоторого допуска Є (решение 52). Если не находится, то необходима еще одна итерация, и в процессе 40 возвращаются к вычислению коэффициента D затухания (блок 46). Если вновь определенный истинный ход приближается к ранее определенному истинному ходу («да» при принятии решения 52), то итерацию для определения истинного хода можно прекратить и продолжить процесс 40 для выполнения итерации относительно коэффициента D затухания с использованием сходящегося истинного хода S (блок 54). Затем скважинные данные вычисляют с использованием вновь вычисленного коэффициента D затухания (блок 56) и после этого вычисляют мощность HPump насоса в лошадиных силах (блок 58).
[25] На этой стадии выполняют проверку, чтобы выяснить, находится ли мощность HPump насоса близко к гидравлической мощности Hhyd в пределах некоторого допуска (решение 60). Если да, то процесс 40 заканчивают, поскольку диаграмма скважинного насоса со сходящимися истинным ходом и коэффициентом D затухания успешно вычислена (блок 62). Если мощность HPump насоса и гидравлическая мощность Hhyd не находятся достаточно близко друг к другу («нет» при принятии решения 60), то в ходе процесса 40 корректируют текущий коэффициент D затухания в соответствии с отношением мощности HPump насоса к гидравлической мощности Hhyd (блок 64). Процесс 40 вычисления диаграммы насоса с этим скорректированным коэффициентом D затухания повторяют до тех пор, пока для насоса значения мощности HPump насоса и гидравлической мощности Hhyd не приблизятся друг к другу в пределах заданного допуска (блоки с 56 по 64).
[26] Преимущество автоматической итерации относительно истинного хода и коэффициента затухания, изложенной выше, заключается в том, что коэффициент D затухания корректируется автоматически без вмешательства человека. Поэтому пользователи, управляющие группами скважин от средних до больших, могут не тратить время на ручную коррекцию коэффициента D затухания, которая может требоваться в других способах.
С. Модель криволинейной скважины
[27] Как отмечалось выше, большая часть способов, применяемых в настоящее время для вычисления скважинных данных, с использованием положения поверхности и нагрузки, регистрируемых динамометрической системой на поверхности, основана на модели вертикального ствола, в которой не учитывается искривление скважины. На фиг. 3А для примера схематично показана вертикальная модель 30 вертикальной скважины 18, имеющей колонну 28 насосных штанг, расположенную в ней. В случае вертикальной модели 30 скважины только релевантные силы трения являются вязкостными по природе. Вязкостное трение Fv является результатом действия сил вязкости, возникающих в кольцевом пространстве во время насосного цикла, которые пропорциональны скорости осевого смещения u.
[28] Однако, когда дело касается искривленной скважины, такой как показанная в искривленной модели 32, изображенной в некоторой степени с преувеличением на фиг. 3В, механическое трение Fm возникает вследствие контакта между насосно-компрессорной колонной 18, колонной 28 насосных штанг и соединительными муфтами 29. Хотя этими силами Fm можно пренебрегать, когда скважина является преимущественно вертикальной, их следует учитывать, когда скважина является искривленной. Если в алгоритме, используемом для вычисления скважинных данных, не учитывать механическое трение Fm в случае искривленной скважины, получающаяся скважинная диаграмма может оказаться искаженной. Этого состояния нельзя избежать изменением обусловленного вязкостью коэффициента D затухания в волновом уравнении.
[29] Поэтому вертикальная модель не очень подходит для вычисления скважинных данных, когда штанговую насосную систему 10 используют в искривленной скважине. Прежде всего, динамические свойства колонны 28 насосных штанг являются иными в искривленных скважинах, чем в вертикальных скважинах. Действительно, предполагается, что в вертикальных скважинах колонна 28 насосных штанг не перемещается в поперечном направлении. Однако в искривленных скважинах механическое трение Fm перестает быть пренебрежимо малым, поскольку имеется протяженный контакт между колонной 28 насосных штанг, соединительными муфтами 29 и насосно-компрессорной колонной 18. Кроме того, поскольку скважина является искривленной, некоторые секции колонны 28 насосных штанг могут изгибаться между двумя соединительными муфтами 29 в средней точке резкого поворота, и это также входит в концепцию кривизны колонны 28 насосных штанг.
[30] В приведенных выше уравнениях, рассмотренных применительно к волновому уравнению, силы трения вязкого характера учитываются только в вертикальной модели. Однако же, как подробно описано выше, силы трения, специфические для искривленных скважин, имеют вязкий и механический характер. Хотя механическим трением Fm обычно пренебрегают, оно имеется, поскольку обращает на себя внимание. Например, для решения проблемы относительно кулоновского трения, которое является результатом механического трения в искривленной скважине, наиболее хорошо известный способ был раскрыт Гиббсом и Лукасевичем. См. Gibbs S.G., «Design and diagnosis of deviated rod-pumped wells», SPE Annual Technical Conference and Exhibition, Oct. 6-9, 1991; и Lukasiewicz S.A., «Dynamic behavior of the sucker rod string in the inclined well», Production Operations Symposium, April 7-9, 1991, оба источника включены в эту заявку путем ссылки.
[31] Для решения проблемы механического трения в искривленных скважинах Гиббс модифицировал волновое уравнение путем добавления к нему члена кулоновского трения. Например, в публикации № 2010/0111716 заявки на патент США (Gibbs et al.) в волновое уравнение включен член C(x), который представляет тяговую силу, действующую на штангу и насосно-компрессорную колонну. В противоположность ему Лукасевич получил уравнения осевого и поперечного перемещения штангового элемента, образующие систему связанных дифференциальных уравнений.
D. Уравнения осевого и поперечного перемещения штангового элемента
[32] Как показал Лукасевич, колонна насосных штанг в искривленной скважине перемещается в продольном направлении вверх и вниз (то есть в осевом направлении) и также перемещается в стороны (то есть в поперечном направлении). Поэтому поведение волн осевого напряжения, а также волн поперечного напряжения в штанговом элементе можно анализировать, чтобы лучше характеризовать поведение колонны 28 насосных штанг в искривленной скважине.
[33] Для этого на фиг. 4 схематически представлено поведение штангового элемента 34 штанговой насосной системы в модели 32 искривленной скважины. На этом схематическом изображении показаны различные силы, действующие на штанговый элемент 34 в осевом и поперечном направлениях. Как представлено здесь, u(s,t) является осевым перемещением штангового элемента 34 длиной ds, а v(s,t) является поперечным перемещением штангового элемента 34. Радиус Rφ кривизны можно вычислять, как и траекторию буровой скважины, в прямоугольных координатах при использовании инклинометрии. Для таких вычислений имеются несколько способов, таких как способ минимальной кривизны или способ радиуса кривизны, раскрытые Гиббсом в Gibbs S. G., «Design and diagnosis of deviated rod-pumped wells», SPE Annual Technical Conference and Exhibition, Oct. 6-9, 1991, источник включен в эту заявку путем ссылки.
[34] На диаграмме сил, действующих на штанговый элемент 34, радиус R кривизны показан в виде стрелки, проходящей от центра кривизны к штанговому элементу 34 длиной ds. Осевая сила, обозначенная F, действует на штанговый элемент 34 в направлении вверх и вниз. Поэтому осевая сила имеет осевую составляющую, а также поперечную составляющую. Сила Ft кулоновского трения в точке контакта между штанговым элементом 34 и насосно-компрессорной колонной 18 противоположна движению штангового элемента 34. Масса W показана как гравитационная сила, тянущая вниз штанговый элемент 34. Нормальная сила N действует на штанговый элемент 34 перпендикулярно в направлении к центру кривизны. Масса W и нормальная сила N также имеют осевую и поперечные составляющие.
[35] Таким образом, осевое направление (то есть направление, тангенциальное к штанге) можно характеризовать следующим уравнением движения:

[36] В этом уравнении F - осевая сила, действующая на штангу, u(t) - осевое перемещение, А - площадь поперечного сечения штанги, γ - плотность, g - ускорение силы тяжести, θ - угол наклона, D - коэффициент вязкостного затухания, Ft - сила трения со стороны насосно-компрессорной колонны 18, s - длина, измеряемая вдоль криволинейной штанги, и t - время.
[37] Как отмечалось выше, сила Ft представляет собой силу кулоновского трения, являющуюся нелинейной силой, которая направлена противоположно движению материальных тел в механической системе. Кулоновское трение представляет собой сухое трение, которое препятствует относительному поперечному движению двух твердых поверхностей, находящихся в контакте. Относительное движение колонны 28 насосных штанг, насосно-компрессорной колонны 18 и соединительных муфт, прижатых друг к другу, как это видно из фиг. 1, является источником рассеяния энергии, когда скважина откачана.
[38] В поперечном направлении уравнение поперечного движения можно охарактеризовать как:



[39] В этих уравнениях EI - изгибная жесткость, Е - модуль упругости Юнга, I - изгибающий момент, Dt - коэффициент вязкостного затухания в поперечном направлении, nt - поперечная нормальная сила со стороны насосно-компрессорной колонны 18 и np - поперечная нормальная сила со стороны жидкости под давлением p, а 

[40] Как показано Лукасевичем, осевую силу можно ввести в уравнение (1) осевого движения, чтобы получить:

[41] В этом уравнении a - скорость акустической волны в штанговом элементе 34. Кроме того, в предположении, что штанговый элемент 34 лежит на насосно-компрессорной колонне 18 между соединительными муфтами 29, уравнение (1) осевого движения можно перезаписать в виде:

[42] Дополнительные подробности относительно этих уравнений и осевой силы раскрыты в работе Lukasiewicz S.A., «Dynamic behavior of the sucker rod string in the inclined well», Production Operations Symposium, April 7-9, 1991, которая включена в эту заявку путем ссылки.
[43] Как можно видеть, в уравнении (3) осевого движения используется положение колонны насосных штанг на поверхности для вычисления положения в скважине на каждом конечно-разностном узле вниз по буровой скважине до тех пор, пока узел не будет непосредственно над скважинным насосом. Уравнения (3) и (2) осевого и поперечного движения объединяют для образования системы двух связанных нелинейных дифференциальных уравнений четвертого порядка.
[44] Важно заметить, что кулоновское трение (то есть механическое трение, которое возникает в результате контакта между штангами 28, насосно-компрессорной колонной 18 и соединительными муфтами 29) может быть значительным в искривленной скважине и не может быть имитировано при использовании вязкостного затухания. В частности силы кулоновского трения не пропорциональны скорости штангового элемента, поскольку имеются силы вязкостного трения. В некоторых случаях коэффициент вязкостного затухания можно повышать для исключения излишнего трения, но внутрискважинное трение, обусловленное механической частью, не может быть исключено. Если вязкостное затухание станет слишком большим, эффекты механического трения могут оказаться исключенными, но фактически скважинные данные больше не будут представлять то, что происходит в скважинном насосе.
[45] В уравнении (2) второй член является нелинейным и представляет влияние вертикального отклонения на осевое перемещение. Следует заметить, что уравнения, приведенные выше, являются такими же, как уравнения, представленные Лукасевичем, и что в модели, разработанной Гиббсом, игнорируется поперечное перемещение колонны 28 насосных штанг.
[46] Имеется возможность рассматривать механическое трение в случае, когда дело касается искривленных скважин, к которым растет интерес в отрасли промышленности. Часто пользователи пытаются поправить внутрискважинное трение на скважинной диаграмме путем изменения коэффициента вязкостного затухания или путем добавления члена тягового усилия (как это было сделано Гиббсом). Однако же этим можно значительно исказить скважинные результаты и завуалировать скважинные условия.
[47] Хотя в предшествующем уровне техники (и особенно Лукасевичем) были получены уравнения движения колонны насосных штанг в искривленной скважине, необходимы практические способы выполнения вычислений. Это особенно справедливо в случае, когда вычисления выполняются контроллером насоса или другим обрабатывающим устройством, которое может иметь ограниченные возможности обработки.
Краткое описание чертежей
На чертежах:
[48] фиг. 1 - штанговая насосная система с контроллером для управления насосом системы;
[49] фиг. 2 - иллюстрация итерации относительно истинного хода и коэффициента затухания применительно к модифицированному алгоритму Эверитта-Дженнингса для вычисления диаграммы насоса согласно предшествующему уровню техники;
[50] фиг. 3А - схематическое представление модели вертикальной скважины;
[51] фиг. 3В - схематическое представление модели искривленной скважины;
[52] фиг. 4 - схематическое представление динамических свойств штангового элемента из штанговой насосной системы для искривленной скважины;
[53] фиг. 5 - блок-схема последовательности действий процесса вычисления скважинных данных для штанговой насосной системы в искривленной скважине;
[54] фиг. 6А - иллюстрация контроллера насоса согласно настоящему раскрытию для штанговой насосной системы; и
[55] фиг. 6В - структурная схема контроллера насоса для управления штанговой насосной системой и диагностирования ее согласно настоящему раскрытию.
Подробное описание раскрытия
[56] Согласно настоящему раскрытию модифицированный алгоритм Эверитта-Дженнингса используют для вычисления скважинных данных по наземным данным путем решения одномерного уравнения затухающей волны с помощью конечных разностей. Однако в одномерном уравнении затухающей волны учитывается трение только вязкого характера и игнорируется механическое трение всякого вида. Если скважина является по существу вертикальной, механическое трение является незначительным, а получаемые скважинные данные могут быть точными. Однако в искривленных или горизонтальных скважинах необходимо учитывать механическое трение между штангами, соединительными муфтами и насосно-компрессорной колонной. Согласно этому раскрытию модифицированный способ Эверитта-Дженнингса приспособлен к использованию конечных разностей для включения коэффициентов механического трения в вычисление скважинных данных в случае искривленных или горизонтальных скважин.
[57] Для выполнения этого в идее настоящего раскрытия подход конечных разностей используется для интерпретации системы двух связанных нелинейных дифференциальных уравнений, в которые включены силы, действующие на штанговый элемент в искривленной скважине. Учитываются осевое перемещение и поперечное перемещение штангового элемента, обеспечивающие полную модель для анализа скважинных условий. По существу, в идеях настоящего раскрытия используются уравнения, полученные Лукасевичем, которые были описаны ранее и включены в эту заявку путем ссылки. Уравнения осевого и поперечного движения для штангового элемента были приведены в разделе «Предпосылки создания настоящего раскрытия».
[58] Теперь обратимся к фиг.5, на которой представлена блок-схема последовательности действий при выполнении процесса 100 решения системы связанных дифференциальных уравнений для осевого и поперечного перемещений штангового элемента в искривленной скважине. Для производных, которые входят в ранее приведенные уравнения (2), (3) и (4), разложения в ряд Тейлора используют для образования конечно-разностных аналогов (блок 102). Для первой и второй производных используют соответственно центральную разность первого порядка точности и центральную разность второго порядка точности. Для получения дополнительной детальной информации относительно получения аналога второй производной по перемещению обратитесь к Everitt T.A. и Jennings J.W., «An improved finite-difference calculation of downhole dynamometer cards for sucker-rod pumps», SPE 18189, 1988, источник включен в эту заявку путем ссылки.
[59] В частности, конечно-разностные аналоги представлены ниже (нижним индексом i представлен узел на осевом расстоянии колонны насосных штанг и нижним индексом j представлен временной шаг). В случае пространственной дискретизации конечно-разностные аналоги имеют вид:

[60] В случае дискретизации во времени конечно-разностные аналоги имеют вид:

[61] Аналоги производных по времени являются непосредственными. Однако предпочтительно, чтобы производные по пространству более высокого порядка, чем первого, имели конечно-разностные аналоги, распределенные по нескольким уравнениям для согласования с различными коническими свойствами колонны 28 насосных штанг 28. Распределение конечно-разностных аналогов по нескольким уравнениям прежде всего позволит прослеживать изменение Δs длины криволинейной штанги, так что значения положения, нагрузки и напряжения могут быть вычислены на выбранных интервалах вниз по буровой скважине в противоположность интерполяции между фиксированными точками. Эта возможность дает пользователю дополнительную степень свободы при уточнении дискретизации для оптимизации анализа напряжений.
[62] Для взятия производной четвертого порядка по перемещению используют схему центральной конечной разности второго порядка:

[63] Для составления диагностической модели искривленной скважины на основании наземных измерений и вычисления диаграммы скважинного насоса уравнения (2) и (3) поперечного и осевого движения следует решать одновременно. Как рассмотрено подробно ниже, идеями настоящего раскрытия предоставляется решение для модели искривленной скважины.
[64] Для нахождения начального значения осевого перемещения u на этапе инициализации (блок 104) без потери общности можно предположить, что колонна 28 насосных штанг лежит на насосно-компрессорной колонне 18. Иначе говоря, предполагают, что поперечное перемещение отсутствует, то есть v=0. В этом случае значение коэффициента (µ) трения (для силы трения, действующей на колонну 28 насосных штанг со стороны насосно-компрессорной колонны 18) выбирают равным 0,05 (блок 106), и это значение может быть основано на эмпирических данных или другой информации, и в качестве первого шага решают (блок 108) упрощенную версию уравнения (4) осевого движения в предположении отсутствия поперечного перемещения.
[65] В частности, включение конечно-разностных аналогов в упрощенную версию уравнения (4) осевого движения дает:

[66] Затем, все еще в предположении, что поперечное перемещение отсутствует, вычисляют (блок 110) осевую силу F и соответственно решают (блок 112) уравнение (2) поперечного движения. В частности, включение конечно-разностных аналогов в осевую силу и уравнение (2) поперечного движения дает:
[67] На данном этапе имеем начальные значения поперечного перемещения v и осевого перемещения u. Вычисляют (блок 114) осевую силу F и силу Ft трения и решают (блок 116) уравнение осевого движения. В частности, введение конечно-разностных аналогов в осевую силу F, силу Ft трения и уравнение (3) осевого движения дает:
[68] Наконец, нахождение решения для перемещения ui+1,j из приведенной выше системы дает положение на скважинном насосе в скважине, используемое для вычисления диаграммы скважинного насоса (блок 116). Затем вычисляют (блок 118) нагрузку на скважинный насос, используя закон Гука (то есть 
[69] В частности, чтобы найти решение для перемещения ui+1,j из приведенной выше системы, необходимо знать перемещения двух узлов позади в пространстве, ui,j и ui-1,j, относительно вычисляемого узла ui+1,j. Чтобы начать решение, необходимо знать перемещения u0,j и u1,j для всех временных шагов j. Начальное перемещение u0,j известно из наземных измерений в штанговой насосной системе, но перемещение u1,j следующего узла вычисляют с использованием закона Гука, при этом нагрузкой на полированный шток, НагрузкойPR (поверхностной нагрузкой за вычетом плавучей массы штанг) заменяют Нагрузку и аналогом разности вперед первого порядка точности заменяют 

[70] Поскольку численная методология решения системы связанных нелинейных дифференциальных уравнений аналогична численной реализации модифицированного способа Эверитта-Дженнингса, аналогичный итерационный метод можно использовать для вычисления истинного хода и коэффициента затухания применительно к модели искривленной скважины, раскрытой в этой заявке. См., например, Pons-Ehimeakhe V., «Modified Everitt-Jennings algorithm with dual iteration on the damping factors», 2012 SouthWestern Petroleum Short Course, Lubbock, Texas, April 18-19. Кроме того, для оптимизации разрешения вязкостного затухания в модели искривленной скважины, раскрытой в этой заявке, обычный алгоритм может дополнительно включать в себя итерацию относительно одинарных или сдвоенных коэффициентов затухания, как это раскрыто в совместно рассматриваемых заявках (205-0322US2) под названием «Calculating downhole pump card with iterations on single damping factor» и (205-0322US3) под названием «Calculating downhole pump card with iterations on dual damping factors», которые включены в эту заявку путем ссылки. Таким образом, одинарный коэффициент D затухания, который охватывает вязкостное затухание, или сдвоенные коэффициенты Dup и Ddown затухания в приведенных выше уравнениях для хода вверх и хода вниз могут быть итерированы в сочетании с вычислениями линий нагрузки флюидом и проверкой на вогнутость для получения лучшей сходимости к соответствующему затуханию применительно к образуемой диаграмме скважинного насоса.
[71] Использование конечных разностей для решения системы связанных дифференциальных уравнений представляет собой полезный способ анализа напряжения в штанговой насосной системе. Разделение конечно-разностных аналогов для пространственной дискретизации позволяет иметь обоснованную модель конусовидной колонны насосных штанг, в том числе стальных штанг и стекловолоконных штанг с ударными штангами. Наконец, включение кулоновского трения в анализ модели искривленной скважины дает лучшее приближение скважинных условий, чем использование модели вертикального ствола.
[72] Когда процесс 100, раскрытый в этой заявке, применяют в качестве способа диагностирования, то образуют скважинную диаграмму без излишнего внутрискважинного трения, вызываемого отклонением, и при использовании оптимального вязкостного затухания. Этот процесс 100 является особенно полезным при управлении скважинами на основании скважинных данных. Как должно быть понятно, идеи настоящего раскрытия можно реализовать с помощью цифровых электронных схем, компьютерного аппаратного обеспечения, компьютерного аппаратно-программного обеспечения, компьютерного программного обеспечения или любого сочетания из них. Идеи настоящего раскрытия можно реализовать с помощью компьютерного программного продукта, материально воплощенного в машиночитаемом запоминающем устройстве, выполняемого программируемым процессором, так что программируемый процессор, исполняющий программные инструкции, может выполнять действия настоящего раскрытия.
[73] В этой связи идеи настоящего раскрытия могут быть реализованы удаленным обрабатывающим устройством или контроллером насоса. Например, на фиг. 6А показан вариант осуществления контроллера 200 насоса, установленного на штанговой насосной системе 10, такой как станок-качалка, обычно используемой для добычи флюида из скважины. Насосная система 10 включает в себя балансир 11, соединенный с рамой 15. Балансир 11 в рабочем состоянии соединен с полированным штоком 12, соединенным через посредство колонны насосных штанг (непоказанной) со скважинным насосом (непоказанным), который может быть любым скважинным насосом с возвратно-поступательным движением, рассмотренным в этой заявке. Двигателем 17 управляют с панели 19 управления двигателя для перемещения балансира 11 и возвратно-поступательного перемещения полированного штока 12, который в свою очередь приводит в действие скважинный насос. Хотя показан станок-качалка, могут использоваться другие штанговые насосные системы, такие как станок-качалка ленточного типа или любая другая система, которая перемещает возвратно-поступательно колонну насосных штанг с использованием тросов, ремней, цепей и гидравлических и пневматических силовых систем.
[74] Обычно датчики 202 и 204 измеряют на поверхности данные о нагрузке на насосную систему 10 и положении ее, а измеряемые данные с датчиков 202 и 204 передаются к контроллеру 200. После обработки информации контроллер 200 посылает сигналы на панель 19 управления двигателем для приведения в действие насосной системы 10. Конкретное размещение контроллера 200 и датчиков 202 и 204 раскрыто в патенте США № 7032659, который включен в эту заявку путем ссылки.
[75] Как показано, в контроллере 200 использован датчик 202 нагрузки для обнаружения массы флюида в насосно-компрессорной колонне во время работы насосной системы 10 и использован датчик 204 положения для измерения положения насосной системы 10 на протяжении каждого цикла хода. Датчик 204 положения может быть любым устройством измерения положения, используемым для измерения положения относительно верхней или нижней точки хода. Например, датчик 204 положения может состоять из двух частей: из собственно датчика положения, который выполняет непрерывное измерение положения, и дискретного переключающего устройства, которое замыкается и размыкается при заданных положениях полированного штока 12.
[76] В качестве варианта степенью поворота плеча кривошипа насосной системы может обеспечиваться получение данных о перемещении. Например, датчик может определять, когда плечо кривошипа системы проходит мимо конкретного места, и картина имитируемого перемещения полированного штока в зависимости от времени может корректироваться для получения оценок положений полированного штока в моменты времени между этими показаниями плеча кривошипа. Согласно другому варианту степенью наклона балансира 11 могут обеспечиваться данные о перемещении. Например, к балансиру 11 может быть прикреплено устройство для измерения степени наклона насосной установки.
[77] Данные о нагрузке на систему 10 можно измерять непосредственно с использованием тензометрического датчика нагрузки, вводимого между зажимом полированного штока и поддерживающим брусом. В качестве варианта деформацией балансира 11 могут обеспечиваться данные о нагрузке. Например, при использовании датчика 202 нагрузки контроллер 200 может измерять деформацию полированного штока 12 и в таком случае может управлять насосной системой 10 на основании измеряемой деформации. В датчике 202 нагрузки можно использовать любое из ряда измеряющих деформацию устройств, известных специалисту в данной области техники. Например, датчик 202 нагрузки может быть устройством измерения нагрузки, используемым в насосной системе 10, которое включает в себя тензометрический датчик нагрузки, устанавливаемый на насосной штанге 12 или устанавливаемый на балансире 11. Датчик 202 нагрузки может измерять деформацию полированного штока 12, и в нем может использоваться тензометрический преобразователь, привариваемый к верхнему фланцу балансира 11.
[78] В качестве варианта, как раскрыто в патенте США №5423224, датчик 202 нагрузки может быть устройством измерения деформации, которое закрепляют на несущей нагрузку поверхности балансира 11 или любом удобном месте. Согласно другому примеру в датчике 202 нагрузки можно использовать узел, аналогичный узлу, раскрытому в патенте США №7032659, который полностью включен в эту заявку путем ссылки.
[79] Наконец, амплитуду и частоту сигнала электропитания, подаваемого к двигателю 17, можно использовать для определения частоты вращения двигателя (то есть данных о перемещении) и вращающего момента двигателя (то есть данных о нагрузке). Таким образом, из частоты вращения двигателя и перемещения полированного штока можно получать группу пар данных о частоте вращения двигателя и перемещении для множества перемещений на всем протяжении полированного штока. Как описано в патенте США №4490094, эти данные о перемещении, которые представляют полный ход насосной системы 10, затем могут быть преобразованы в нагрузку на колонну насосных штанг и перемещение колонны насосных штанг для множества перемещений на всем протяжении полированного штока.
[80] Элементы контроллера 200 насоса схематически показаны на фиг.6В. В общем случае контроллер 200 включает в себя один или несколько интерфейсов 212 датчиков, принимающих измерения с датчиков 202 и 204 нагрузки и положения. Дополнительные входы контроллера 200 могут быть соединены с другими устройствами, такими как инфракрасный измеритель обводненности, акустическое зондирующее устройство (АЗУ), обеспечивающими данные в реальном времени, которые можно регистрировать для выполнения анализа восстановления давления и калибровки в реальном времени при контроле уровня флюида. Кроме того, контроллер 200 включает в себя обычно устанавливаемую систему электропитания (непоказанную).
[81] Программное обеспечение 222 и данные 224 контроллера 200 сохраняются в запоминающем устройстве 220. Запоминающее устройство 220 может быть энергозависимым запоминающим устройством с резервным батарейным питанием или энергонезависимым запоминающим устройством, таким как однократно программируемое запоминающее устройство или флэш-память. Кроме того, запоминающее устройство 220 может быть любым сочетанием подходящих внутренних и внешних запоминающих устройств.
[82] Программное обеспечение 222 может включать в себя программное обеспечение для управления двигателем и программное обеспечение для диагностирования насоса, а сохраняемые данные 224 могут быть измерениями, регистрируемыми с ряда датчиков 202 и 204 нагрузки и положения, и результатами вычислений. В данных 224 в запоминающем устройстве 220 сохраняются характеристики скважины, в том числе глубина, азимут и наклон мест вдоль скважины, которые могут быть получены из данных бурения и исследований. Поскольку в некоторых случаях колонна насосных штанг может быть конусовидной, в данных 224 в запоминающем устройстве 220 могут также сохраняться характеристики относительно конусности штанг, такие как глубина, диаметр, масса и длина различных секций колонны насосных штанг.
[83] Обрабатывающий блок 210, имеющий один или несколько процессоров, обрабатывает измерения, сохраняемые в виде данных 224 в запоминающем устройстве 220, и выполняет программное обеспечение 222 для осуществления различных вычислений, подробно описанных в этой заявке. Например, обрабатывающий блок 210 получает выходные данные с наземных датчиков, такие как измерения нагрузки и положения с датчиков 202 и 204. В свою очередь, обрабатывающий блок 210 сопоставляет выходные данные с датчика 202 нагрузки с положением полированного штока 12 и определяет нагрузку, ощущаемую полированным штоком 12 в продолжение циклов хода. Затем при использовании программного обеспечения 212 обрабатывающий блок 210 вычисляет скважинную диаграмму, показывающую нагрузку на скважинный насос и положение его.
[84] Предпочтительно, чтобы для управления насосной системой 10 в контроллере 200 насоса использовался полный алгоритм Эверитта-Дженнингса с конечными разностями для решения волнового уравнения. Контроллер 200 вычисляет наполняемость насоса и оптимизирует добычу при каждом ходе. Эта информация используется для минимизации ударов плунжера по флюиду путем прекращения или замедления работы насосной системы 10 с учетом заданного параметра наполняемости насоса. Кроме того, контроллер 200 насоса может анализировать диаграмму скважинного насоса и определять возможные проблемы, связанные с насосом и работой его. Это возможно потому, что форма, картина и другие признаки, связанные с диаграммой скважинного насоса, представляют различные состояния насоса и условия работы его.
[85] После обработки измерений контроллер 200 посылает сигналы на панель 19 управления двигателем для приведения в действие насосной системы 10. Например, один или несколько коммуникационных интерфейсов 214 связаны с панелью 19 управления двигателем для управления работой насосной системы 10, такой как выключение двигателя 17 для предотвращения опорожнения скважины и т. д. Коммуникационные интерфейсы 214 могут передавать сообщения соответствующих форм, и они также могут передавать данные и результаты вычислений на удаленное место при использовании любого подходящего способа связи.
[86] Приведенное выше описание предпочтительных и других вариантов осуществления не предполагается ограничивающим или сокращающим объем или применимость концепций изобретения, предложенных заявителем. В отношении преимущества настоящего раскрытия должно быть понятно, что признаки, описанные выше в соответствии с любым вариантом осуществления или аспектом раскрытого предмета изобретения, могут использоваться сами по себе или в сочетании с любым другим описанным признаком в любом другом варианте осуществления или аспекте раскрытого предмета изобретения.
[87] В обмен на раскрытие концепций изобретения, содержащихся в этой заявке, заявитель ожидает получить все патентные права в соответствии с прилагаемой формулой изобретения. Поэтому предполагается, что прилагаемая формула изобретения в полной мере включает в себя все модификации и изменения, которые подпадают под объем нижеследующей формулы изобретения или эквивалентов.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЫЧИСЛЕНИЕ ЛИНИЙ НАГРУЗКИ ФЛЮИДОМ, ПРОВЕРКА НА ВОГНУТОСТЬ И ИТЕРАЦИИ ОТНОСИТЕЛЬНО КОЭФФИЦИЕНТА ЗАТУХАНИЯ ДЛЯ ДИАГРАММЫ СКВАЖИННОГО НАСОСА | 2012 |
|
RU2602719C2 |
| СПОСОБЫ И УСТРОЙСТВО ДЛЯ КАЛИБРОВКИ КОНТРОЛЛЕРОВ ШТАНГОВЫХ ГЛУБИННЫХ НАСОСОВ | 2016 |
|
RU2740085C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДЕБИТА НЕФТЯНОЙ СКВАЖИНЫ | 2008 |
|
RU2372480C1 |
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ ПЕРЕМЕЩЕНИЕМ ШТОКА В СИСТЕМЕ ОТКАЧКИ ФЛЮИДА ИЗ СКВАЖИНЫ | 2005 |
|
RU2381384C1 |
| УСТРОЙСТВО ДЛЯ АНАЛИЗА И УПРАВЛЕНИЯ СИСТЕМОЙ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО НАСОСА ПУТЕМ ОПРЕДЕЛЕНИЯ КАРТЫ НАСОСА | 2009 |
|
RU2556781C2 |
| СКВАЖИННЫЙ ШТАНГОВЫЙ НАСОС | 2001 |
|
RU2201530C2 |
| НАСОСНАЯ СИСТЕМА ДВОЙНОГО ДЕЙСТВИЯ С ГИДРАВЛИЧЕСКИМ ПРИВОДОМ ДЛЯ ДОБЫЧИ ФЛЮИДОВ ИЗ НАКЛОННОЙ СКВАЖИНЫ | 2017 |
|
RU2765527C2 |
| СКВАЖИННЫЙ ТРУБОДЕРЖАТЕЛЬ ДЛЯ НАСОСНО-КОМПРЕССОРНЫХ ТРУБ | 2002 |
|
RU2239045C2 |
| Скважинная штанговая насосная установка | 1982 |
|
SU1041749A1 |
| ЯКОРЬ ДЛЯ НАСОСНО-КОМПРЕССОРНЫХ ТРУБ | 2016 |
|
RU2634316C1 |







Изобретение относится к диагностике штанговых насосных установок. Техническим результатом является обеспечение точной информативной диагностики для эффективного управления насосной системой. Предложен способ диагностирования насосной установки, содержащий этапы, на которых: получают наземные измерения, показывающие поверхностную нагрузку и положение поверхности колонны насосных штанг на поверхности; характеризуют осевое и поперечное перемещения колонны насосных штанг двумя связанными нелинейными дифференциальными уравнениями четвертого порядка, включающими в себя уравнение осевого движения и уравнение поперечного движения; вычисляют начальное осевое перемещение колонны насосных штанг, предполагая отсутствие поперечного перемещения и решая уравнение осевого движения; вычисляют начальную осевую силу, используя начальное осевое перемещение и предполагая отсутствие поперечного перемещения; вычисляют начальное поперечное перемещение колонны насосных штанг, используя начальную осевую силу и начальное осевое перемещение; вычисляют осевую силу и силу трения, используя начальное осевое и поперечное перемещения; вычисляют осевое перемещение на скважинном насосе, решая уравнение осевого движения относительно осевой силы и силы трения; вычисляют нагрузку на скважинный насос; и образуют скважинную диаграмму, представляющую нагрузку, связанную с осевым перемещением скважинного насоса. Раскрыт также контроллер для реализации указанного способа. 3 н. и 7 з.п. ф-лы, 8 ил.
1. Способ диагностирования насосной установки, имеющей скважинный насос, расположенный в искривленной буровой скважине, и имеющей двигатель на поверхности искривленной буровой скважины, скважинный насос возвратно-поступательно перемещается в искривленной буровой скважине колонной насосных штанг, в рабочем состоянии перемещаемой двигателем, при этом способ содержит этапы, на которых:
получают наземные измерения, показывающие поверхностную нагрузку и положение поверхности колонны насосных штанг на поверхности;
характеризуют осевое и поперечное перемещения колонны насосных штанг двумя связанными нелинейными дифференциальными уравнениями четвертого порядка, включающими в себя уравнение осевого движения и уравнение поперечного движения;
вычисляют начальное осевое перемещение колонны насосных штанг, предполагая отсутствие поперечного перемещения и решая уравнение осевого движения;
вычисляют начальную осевую силу, используя начальное осевое перемещение и предполагая отсутствие поперечного перемещения;
вычисляют начальное поперечное перемещение колонны насосных штанг, используя начальную осевую силу и начальное осевое перемещение;
вычисляют осевую силу и силу трения, используя начальное осевое и поперечное перемещения;
вычисляют осевое перемещение на скважинном насосе, решая уравнение осевого движения относительно осевой силы и силы трения;
вычисляют нагрузку на скважинный насос и
образуют скважинную диаграмму, представляющую нагрузку, связанную с осевым перемещением скважинного насоса.
2. Способ по п.1, в котором получение наземных измерений содержит измерение поверхностной нагрузки и положения поверхности колонны насосных штанг на поверхности.
3. Способ по п.1, в котором получение наземных измерений содержит получение наземного измерения из запоминающего устройства.
4. Способ по п.1, в котором уравнение поперечного движения формулируется как:
где EI - изгибная жесткость штангового элемента, Е - модуль упругости Юнга, I - изгибающий момент, Rφ - радиус кривизны насосно-компрессорной колонны в искривленной скважине, γ - плотность штангового элемента, А - площадь поперечного сечения штангового элемента, nt - поперечная нормальная сила со стороны насосно-компрессорной колонны в искривленной буровой скважине, np - поперечная нормальная сила со стороны жидкости под давлением p, Dt - коэффициент вязкостного затухания в поперечном направлении, F - осевая сила, действующая на штанговый элемент,
5. Способ по п.1, в котором уравнение осевого движения формулируется как:
где u(t) - осевое перемещение штангового элемента, а - скорость акустической волны в штанговом элементе, А - площадь поперечного сечения штангового элемента, Е - модуль упругости Юнга штангового элемента, γ - плотность штангового элемента, g - ускорение, обусловленное силой тяжести, θ - угол наклона, D - коэффициент вязкостного затухания, Ft - сила трения со стороны насосно-компрессорной колонны, s - длина, измеряемая вдоль штангового элемента, и t - время.
6. Способ по п.1, в котором описание характеристик осевого и поперечного перемещений колонны насосных штанг двумя связанными нелинейными дифференциальными уравнениями четвертого порядка, включающими в себя уравнение осевого движения и уравнение поперечного движения, содержит замену производных двух связанных нелинейных дифференциальных уравнений конечно-разностными аналогами.
7. Способ по п.1, дополнительно содержащий модификацию по меньшей мере одного параметра насосной установки на основании образованной скважинной диаграммы.
8. Способ по п.7, в котором модификация по меньшей мере одного параметра насосной установки на основании образованных данных о скважинном насосе содержит выключение двигателя или корректировку частоты вращения двигателя.
9. Устройство хранения программ, имеющее программные инструкции, сохраняемые в нем, для побуждения программируемого управляющего устройства к выполнению способа по п.1.
10. Контроллер для насосной установки, имеющей наземный двигатель и имеющей скважинный насос, скважинный насос расположен в искривленной буровой скважине и возвратно-поступательно перемещается колонной насосных штанг, расположенной в искривленной буровой скважине, при этом контроллер содержит:
один или несколько интерфейсов, получающих наземные измерения, показывающие поверхностную нагрузку и положение поверхности колонны насосных штанг на поверхности;
запоминающее устройство, находящееся в связи с одним или несколькими интерфейсами и сохраняющее первые характеристики искривленной скважины и вторые характеристики колонны насосных штанг, при этом в запоминающем устройстве сохраняется модель, характеризующая осевое и поперечное перемещения колонны насосных штанг двумя связанными нелинейными дифференциальными уравнениями четвертого порядка, включающими в себя уравнение осевого движения и уравнение поперечного движения; и
обрабатывающий блок, находящийся в связи с одним или несколькими интерфейсами и запоминающим устройством и сконфигурированный для:
вычисления начального осевого перемещения колонны насосных штанг путем предположения об отсутствии поперечного перемещения и путем решения уравнения осевого движения,
вычисления начальной осевой силы с использованием начального осевого перемещения и предположения об отсутствии поперечного перемещения,
вычисления начального поперечного перемещения колонны насосных штанг с использованием начальной осевой силы и начального осевого перемещения,
вычисления осевой силы и силы трения с использованием начальных осевого и поперечного перемещений,
решения уравнения осевого движения относительно осевой силы и силы трения для вычисления осевого перемещения на скважинном насосе,
вычисления нагрузки на скважинный насос и
образования скважинной диаграммы, представляющей нагрузку, связанную с осевым перемещением скважинного насоса.
| US 8036829 B2, 11.10.2011SU 1048167 A1, 15.10.1983RU 2160385 C1, 10.12.2000US 20110091335 A1, 21.04.2011US 7168924 B2, 30.01.2007US 5464058 A1, 07.11.1995 |

