Область техники, к которой относится изобретение
Настоящее изобретение относится к устройству, которое определяет рабочие характеристики насосной скважины. Более конкретно, изобретение направлено на устройство для определения условий внутри скважины штанговым глубинным насосом в вертикальной скважине или наклонной скважине по данным с поверхности скважины, которые получают, измеряют и обрабатывают. Изобретение также относится к анализу проблем, возникающих при откачке во время эксплуатации систем глубинного штангового насоса в таких скважинах. Вертикальная скважина представляет собой скважину, которая пробурена, по существу, вертикалью в землю, а наклонная скважина представляет собой скважину, которая расположена в земле не вертикально относительно поверхности. Наклонная скважина может представлять собой горизонтальную скважину, которая отходит от ее вертикального участка.
Еще более конкретно, изобретение относится к улучшенному контроллеру для анализа рабочих характеристик глубинного насоса в наклонной скважине по сравнению со способами, описанными в способах предшествующего уровня техники, разработанных для номинально вертикальной буровой скважины, как описано в патенте США 3343405 от 26 сентября, 1967 г., автора Gibbs.
Уровень техники
Для насосной эксплуатации глубоких скважин, таких как нефтяные скважины, повсеместно используют последовательность взаимно соединенных насосных штанг для соединения устройства привода, расположенного на поверхности, с насосом, который установлен на дне скважины. Эта последовательность насосных штанг обычно называется колонной насосных штанг или насосной штангой, имеет верхнюю насосную штангу, проходящую через устье обсадной трубы скважины для соединения с устройством привода, таким как качалка насосной установки балансирного типа, через соединительное устройство, обычно называемое подвеской насосной штанги. Устье обсадной трубы скважины включает в себя средство для обеспечения скользящего перемещения верхней насосной штанги, которая обычно называется "устьевым сальниковым штоком".
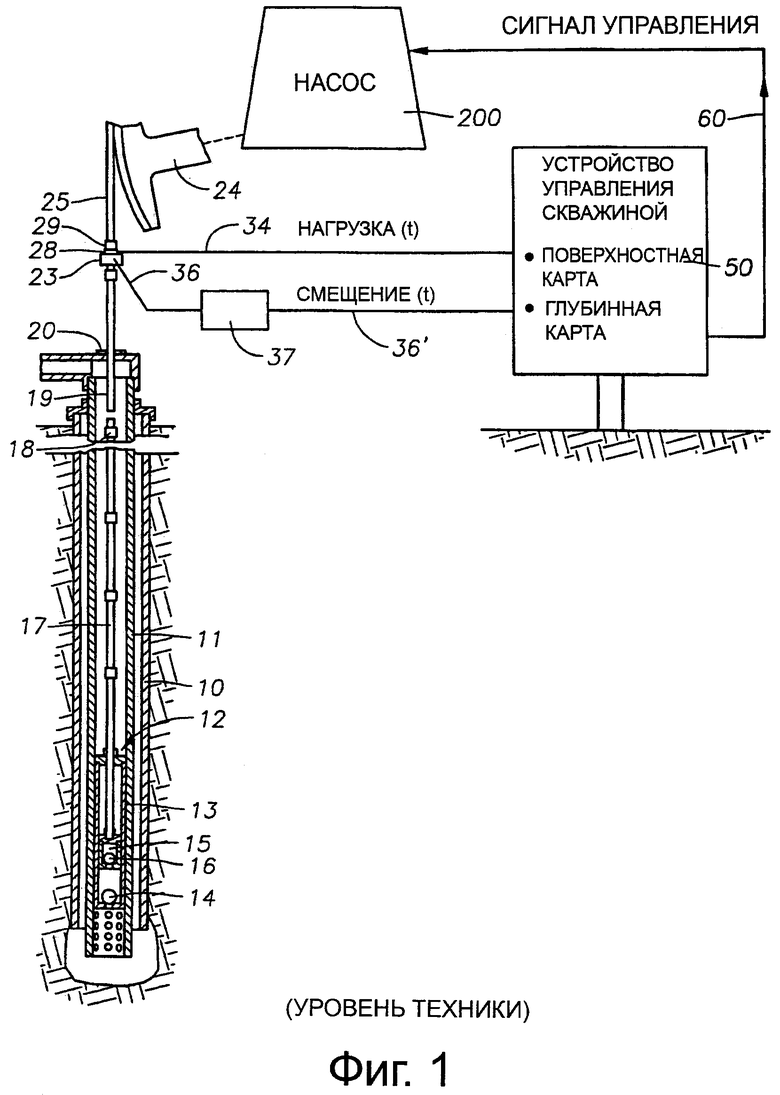
На фиг.1 представлена скважина со штанговым насосом предшествующего уровня техники, показанным для номинально вертикальной скважины.
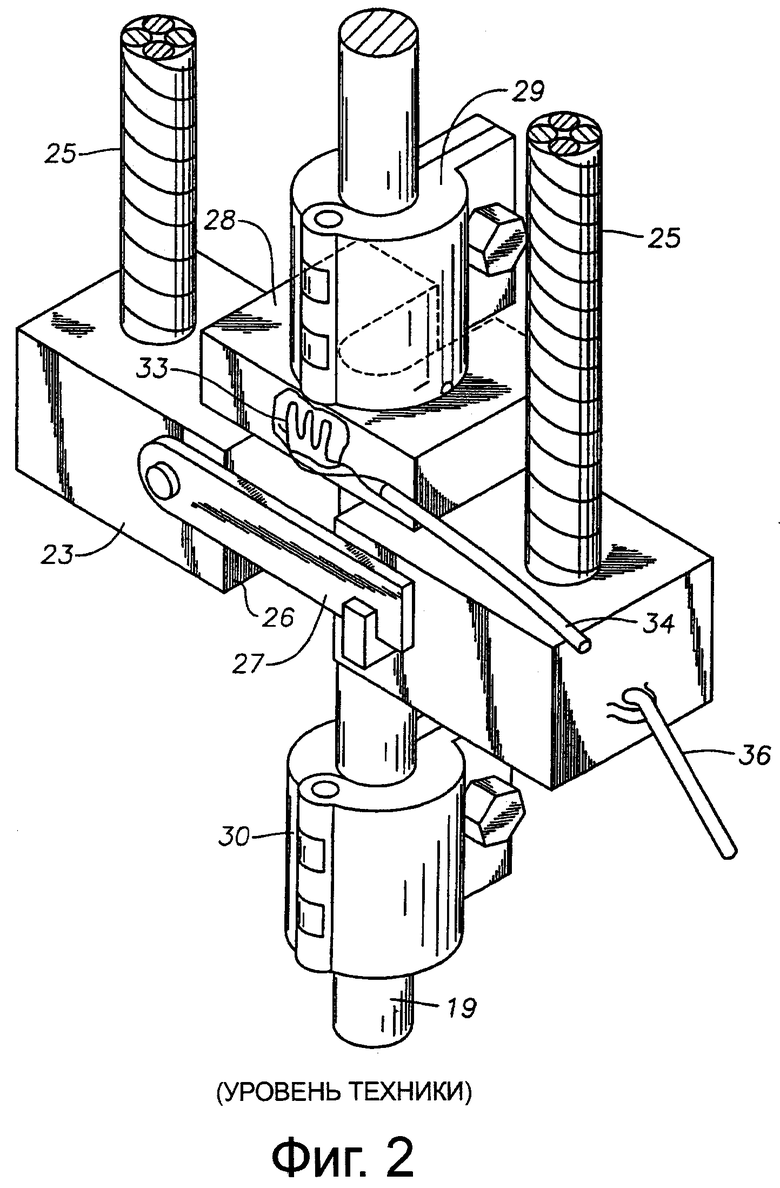
На фиг.2 представлена измерительная установка на поверхности предшествующего уровня техники, с помощью которой измеряют показания поверхностного динамометра ("карты").
На фиг.1 показана номинальная вертикальная скважина, имеющая обычную обсадную трубу 10 скважины, проходящую от поверхности до дна скважины. Внутри обсадной трубы 10 скважины находится эксплуатационная колонна 11, имеющая насос 12, расположенный на ее нижнем конце. Цилиндр 13 насоса содержит всасывающий клапан 14 и плунжер или поршень 15, который, в свою очередь, содержит нагнетательный клапан 16. Плунжер 15 приводится в действие с помощью сочлененной насосной штанги 17, которая идет от поршня 15 вверх через эксплуатационную колонну до поверхности и соединена на ее верхнем конце с помощью соединения 18 с устьевым сальниковым штоком 19, который проходит через фланцевое уплотнение 20 в устье скважины.
На фиг.2 показано, что верхний конец устьевого сальникового штока 19 соединен с подвесной штангой 23, которая свисает со станки-качалки 24 на двух стальных тросах 25. Подвесная штанга 23 имеет U-образной формы паз 26 для приема сальникового штока 19. Фиксирующая заслонка 27 предотвращает выход сальникового штока из паза 26. U-образной формы платформа 28 удерживается на месте в верхней части подвесной штанги 23 с помощью зажима 29. Аналогичный зажим 30 расположен ниже подвесной штанги 23. Подвесной тензометрический датчик 33 нагрузки соединен с платформой 28. Электрический кабель 34 проведен между датчиком 33 нагрузки и устройством 50 управления скважиной. Туго натянутый провод 36 ведет от подвесной штанги 23 к датчику 37 смещения (см. фиг.1). Датчик 37 смещения также соединен с устройством 50 управления скважиной с помощью электрического провода 36'.
Тензометрический подвесной датчик 33 нагрузки представляет собой обычное устройство и работает хорошо известным образом в этой области техники. Когда платформа 28 нагружена, она становится короче и шире из-за сочетания осевого и поперечного напряжения. Поскольку провод тензометрического датчика 33 соединен с платформой 28, на него также воздействует аналогичное напряжение. В результате для тока, проходящего через провод тензометрического датчика, увеличивается поперечное сечение провода, по которому он протекает, и при этом говорят, что провод имеет меньшее сопротивление. Когда подвесная штанга 23 движется вверх и вниз, электрический сигнал, который соотносит сопротивление тензометрического датчика с нагрузкой на сальниковый шток, передают от подвесного датчика 33 нагрузки устройству 50 управления скважиной через электрический кабель 34.
Датчик 37 смещения представляет собой обычное устройство и работает хорошо известным способом для специалистов в данной области техники. Модуль 37 датчика смещения представляет собой потенциометр с бесконечным разрешением с приводом по принципу "трос и катушка", который оборудован узлом обратной намотки с постоянным натяжением (привод через "инвертирующую" пружину). По мере того, как подвесная штанга 23 движется вверх и вниз, натянутый провод 36 активирует потенциометр с приводом от катушки, и формируется сигнал различного напряжения. Этот сигнал связывает электрическое напряжение со смещением сальникового штока, и его также передают устройству 50 управления скважиной. Другие средства для получения сигнала смещения хорошо известны в области техники определения характеристик насосной скважины.
Устройство 50 управления скважиной записывает сигнал смещения как функцию времени вместе с сигналом нагрузки на шток как функцию времени.
В глубоких скважинах длинная насосная штанга имеет значительное растяжение, распределенную массу и т.д., и движение на конце насоса может радикально отличаться от движения, задаваемого на верхнем конце. В ранние годы производства штанговых насосов динамометр сальникового штока представлял собой основное средство для анализа характеристики скважин со штанговыми насосами. Динамометр представляет собой инструмент, который записывает кривую, обычно называемую "картой" нагрузки сальникового штока, в зависимости от смещения. Форма кривой или "карты" отражает условия, которые преобладают в этой скважине. Представляется, что условия на дне скважины могут быть определены путем визуального изучения карты сальникового штока или "поверхностной карты". Из-за разнообразия форм карт, однако, часто невозможно провести диагностику условий глубинного насоса исключительно на основе визуальной интерпретации. В дополнение к сильной зависимости от специалиста по анализу динамограмм способ визуальной интерпретации обеспечивает только данные на дне скважины, которые являются качественными по своей природе. В результате, часто необходимо использовать сложное устройство и процедуры для непосредственного выполнения измерения на дне скважины, для того чтобы точно определить рабочие характеристики на различных уровнях глубины внутри скважины.
В 1936 г. W.E.Gilbert и S.B.Sargent раскрыли инструмент, который буквально непосредственно измерял подповерхностную динамограмму. Он представлял собой механическое устройство, которое первоначально запускалось над насосом в колонне насосных штанг. Он обеспечивал возможность сбора малого количества динамограмм перед изъятием путем вытягивания этих насосных штанг на поверхность. Он размечал карту насоса на вращающейся трубе, угловое положение которой было пропорционально положению плунжера относительно колонны. Нагрузку на насос измеряли как пропорциональную степени растяжения калиброванного стержня, находящегося в инструменте. Поскольку насосную штангу требовалось вытягивать для записи насосной карты, инструмент был дорогостоящим и громоздким при использовании. Но он предоставлял ценную информацию, относящуюся к форме насосных карт в различных режимах работы, как известно, существующих в насосных скважинах, таких как скважины полного заполнения, в случае удара плунжера насоса по жидкости, при неисправности насоса и т.д. Количественные данные, которые он предоставлял, обеспечивали возможность улучшения способов прогнозирования рабочего хода поршня насоса и волюметрической производительности насоса. Устройство динамометра насоса представляло собой развитие, которое проложило путь в истории технологии глубинных штанговых насосов.
При появлении цифровых компьютеров, S.G.Gibbs, соавтор настоящего изобретения, запатентовал в 1967 г. (US 3343409) способ для определения рабочих характеристик на дне скважины, оборудованной штанговым насосом, путем измерения поверхностных данных, (поверхностной карты) и расчета карты, представляющей зависимость нагрузки относительно смещения ("насосной карты" для колонны насосных штанг на выбранной глубине внутри скважины). В результате, система обеспечивала рациональный, экономный, количественный способ определения условий на дне скважины, которые не зависят от навыка и опыта выполняющего анализ оператора. Теперь стало более ненужным угадывать рабочие условия на дне скважины на основе записей, снятых на несколько тысяч футов выше глубинного насоса на сальниковом штоке, расположенном на поверхности, или выполнять дорогостоящие и затратные по времени операции спуска инструмента до дна скважины, для измерения таких условий. Благодаря использованию такого способа становится возможным непосредственно определять подповерхностные условия по данным, полученным на верху скважины.
Патент США 3343409, 1967 г., автора Gibbs показал, что анализ рабочих характеристик штангового насоса начинается с точного подсчета карты глубинного насоса. Gibbs показал, что этот расчет основан на задаче граница-значение, содержащей дифференциальное уравнение с частными производными и набор граничных условий.
Насосная штанга математически аналогична электрической передаче или линии передачи данных, поведение которой описывается уравнением вязкостно-демпфированной волны:

где
ν = скорость звука в стали в футах/секунду;
c = коэффициент демпфирования, 1/секунду;
t = время в секундах;
x = расстояние точки на штоке без напряжения, измеренное от сальникового штока, в футах; и,
u(x,t) = смещение от положения балансирования насосной штанги в футах,
g = вес узла насосной штанги.
В действительности демпфирование в системе глубинного штангового насоса представляет собой сложную смесь множества эффектов. Закон вязкостного демпфирования, установленный уравнением 1, обобщенно выражает все эти эффекты демпфирования в одном эквивалентном члене вязкостного демпфирования. Критерий эквивалентности состоит в том, что эквивалентная сила извлекает из системы такое количество энергии за цикл, которое извлекается реальными силами демпфирования.
На фиг.1 показано, что насосом 200 можно управлять на основе глубинной карты "насоса". В патенте США 5252031 автора S.G.Gibbs иллюстрируется генерирование сигналов управления на основе определения карты насоса. В патенте 6857474 авторов Bramlett и др. описано управление насосом на основе патентованного распознавания карты насоса для анализа работы насоса и его управления. Такие патенты включены сюда по ссылке.
Волновое уравнение, дифференциальное уравнение с частными производными второго порядка по двум независимых переменным (расстояние x и время t), моделирует упругое поведение длинного, тонкого стержня, такого, что используется в штанговых насосах. Как описано в публикации SPE 108762 под названием "Modeling a Finite Length Sucker Rod Using the Semi-Infinite Wave Equation and as Proof to Gibbs' Conjecture," SPE 2007 Annual Technical Conference, Anaheim, CA, 11-14, November 2007, J.J.DaCunha and S.G.Gibbs. Обычно задача, решаемая волновым уравнением, включает в себя граничные условия, определяющие положение верхней части и напряжение на верхней и нижней границах колонны насосных штанг,

вместе с двумя условиями, определяющими исходное положение и скорость

вдоль насосных штанг. Для задачи колонны насосных штанг закон демпфирования в волновом уравнении был выбран, в основном, для математического отслеживания, даже при том, что он не совсем точно копирует реальный эффект диссипации вдоль насосных штанг.
Задача с граничными значениями, которая ведет к расчету глубинной насосной карты, задана не полностью. Исходные условия в формуле (3), приведенной выше, не приняты во внимание. Предполагается, что трение вызывает затухание исходных переходных процессов и что поведение в установившемся состоянии штанговой насосной колонны является одинаковым независимо от того, как произошел запуск насосной системы. При этом не делаются какие-либо предположения об условиях в глубинном насосе. В конечном итоге, определение этих условий является целью решения. Таким образом, никакие граничные условия, аналогичные уравнению (2), представленному выше, не определяют в насосе. Вместо этого два граничных условия принудительно устанавливают на поверхности,

где Е и А представляет собой модуль Юнга и площадь поперечного сечения колонны насосных штанг, соответственно. Используя цифровые способы, получают выборки временных историй P(t) и L(t) через равные приращения времени и выражают их как усеченную последовательность Фурье


Используя разделение переменных, выполняют поиск решений волнового уравнения, которые удовлетворяют историям измеренного времени поверхностного положения и нагрузки. Полученные в результате решения для положений насосной штанги и нагрузки насосной штанги, то есть,

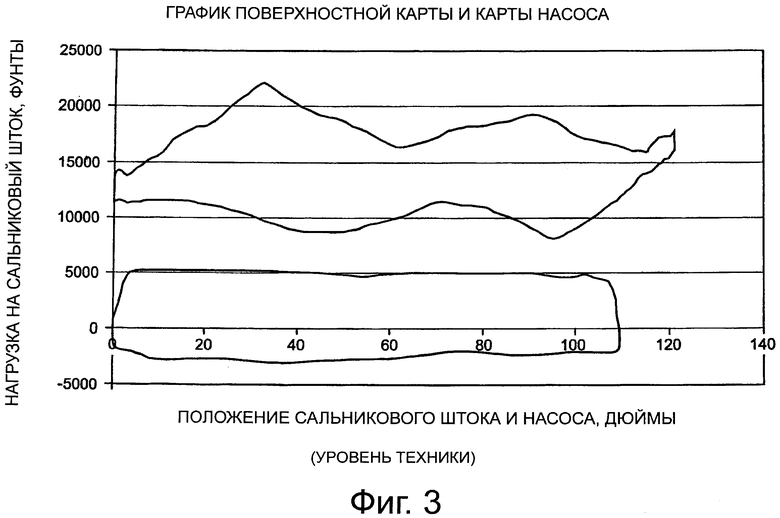
соответственно, оценивают на определенной глубине и в соответствующей последовательности моментов времени для получения глубинной насосной карты. См., например, рассчитанную карту в скважине глубиной 5175 футов, показанную на фиг.3. Эта иллюстрация также представляет измеренные поверхностные данные (в форме обычной динамометрической карты), по которым получают насосную карту дедуктивным способом. Способ расчета глубинной насосной карты по волновому уравнению описан в патенте Gibbs, ссылка на который была сделана выше. На фиг.3 представлены графики поверхностной и насосной карт предшествующего уровня техники для вертикальной скважины, полученные с использованием способа Gibbs расчета насосных карт, на основе измеренных данных поверхностной карты.
Используя эмпирические знания, решение волнового уравнения, представленного выше, гипотетически считается достоверным, несмотря на теоретические вопросы, связанные с не полностью поставленной задачей, на основе которой она была сформулирована. Его можно было бы использовать для определения условий в насосе, если бы закон трения, внедренный в волновое уравнение, был правильным. Эта гипотеза формально называется гипотезой Гиббса.
Решения волнового уравнения, которые соответствуют историям времени измерения поверхностных нагрузок и положения, позволяют получить точную карту глубинного насоса, если закон трения в волновом уравнении является идеальным. При расчете насосной карты не требуется знание условий в насосе. Любая ошибка в законе трения приведет к ошибке рассчитанной насосной карты.
В публикации (SPE 108762), упомянутой выше, представлено неконструктивное математическое доказательство того, что условия на дне скважины в конечной колонне насосных штанг могут быть получены по измерениям в верхней части полубесконечного стержня. Это доказательство было разработано на основе реализации того, что законы физики требуют, чтобы информация об условиях глубинного насоса наклонной скважины распространялась до поверхности в форме волн напряжения. Ключевой элемент в этом доказательстве (и теперь в теореме Гиббса) состоит в том, что точный закон трения стержня должен быть известен. Даже при том что неконструктивное доказательство не выявляет точный закон, такое доказательство все-таки показывает, как этот процесс можно использовать для уточнения закона трения для получения большей точности при расчете условий на дне скважины.
Член 
Квалифицирующее слово "номинальный" используется, поскольку невозможно пробурить идеально вертикальную скважину. Когда нагрузка прикладывается к буровому долоту для бурения скважины, бурильная колонна несколько изгибается и буровая скважина несколько отклоняется от вертикали. Когда требуется получить вертикальную скважину, нефтедобывающая компания включает в себя примечание об отклонении в договор с буровым подрядчиком, в котором предусматривается, что буровая скважина должна быть вертикальной в узких пределах. Вертикальные скважины проще получить с использованием оборудования штанговых насосов, поскольку в этом случае меньше гидравлическое сопротивление бурильной колонны. Колонна насосных штанг передает энергию от поверхностного модуля до глубинного насоса, который поднимает текучую среду на поверхность. Трение приводит к потере рабочего хода поршня насоса и, в результате, снижается эффективность подъема. Оно также приводит к износу и разрыву насосных штанг и насосно-компрессорной колонны.
Практика включения примечаний об отклонении в буровые контракты и технология измерений трассы ствола скважины возникла из-за скандалов в нефтедобывающей промышленности. Недобросовестные нефтедобытчики преднамеренно дренировали нефтяные месторождения, принадлежавшие соседним арендаторам, используя наклонные скважины.
Наклонные скважины все чаще используются. В этих скважинах точка, где (на виде сверху) текучая среда из месторождения попадает в канал скважины, может быть существенно смещена в поперечном направлении от местоположения на поверхности. Такое отклонение может быть непреднамеренным или преднамеренным, как описано выше.
Причин для преднамеренного отклонения скважин множество, и они различные. Большинство причин возникает в результате учета социальных проблем и проблем защиты окружающей среды. Вдоль береговой линии скважины, расположенные на поверхности шельфа, могут быть отклонены для эксплуатации нефтяных месторождений, находящихся под толщей воды. Аналогично, нефтяные месторождения, расположенные под местами жительства или городскими районами, могут эксплуатироваться с использованием наклонных скважин, места расположения на поверхности которых, находятся за пределами чувствительных областей. Добыча нефти и газа требует использования дорожного движения для обслуживания скважин. Наклонные скважины могут уменьшить нежелательный график в областях жилой застройки, поскольку только места расположения на поверхности должны быть обслужены. Зона досягаемости наклонных скважин может составлять тысячи футов (на виде сверху) от места расположения на поверхности. Множество вертикальных скважин требуют множества дорог на поверхности, проведенных к каждому местоположению. Показательный пример может быть представлен системой ANWAR (Национальный заповедник Арти). При использовании наклонных скважин подъездные пути к каждой скважине могут быть ненужными. Двадцать или больше наклонных скважин могут быть соединены вместе в малой области для получения минимального влияния на окружающую среду. Единственного подъездного пути к небольшому местоположению на поверхности при этом будет достаточно. Двадцать разных дорог доступа к каждой скважине (если их пробурить вертикально) потребовались бы в этом случае. Вследствие этих многих причин количество наклонных скважин быстро увеличивается (и продолжит) увеличиваться.
Измерение и управление каналом ствола скважины становятся очень сложными. Различные способы телеметрии используются для передачи тройных комбинаций данных (глубина, азимут и наклон) на поверхность. Эти элементы требуются для получения инклинометрии скважины.
Определение целей изобретения
Основная цель данного изобретения состоит в том, чтобы обеспечить улучшенный контроллер, который определяет карту глубинного насоса для наклонной скважины на основе измерений поверхности.
Другая цель изобретения состоит в том, чтобы обеспечить контроллер скважины, который использует карту глубинного насоса для наклонной скважины для управления штанговым насосом.
Другая цель изобретения состоит в том, чтобы обеспечить улучшенный контроллер, который можно использовать для определения карты глубинного насоса для наклонной скважины и для вертикальной скважины на основе измерений поверхности.
Раскрытие изобретения
Цели изобретения, вместе с другими признаками и преимуществами, внедрены в систему для выполнения мониторинга системы возвратно-поступательного насоса, который добывает углеводороды из невертикальной скважины или вертикальной скважины, которая проходит от поверхности вглубь земли. Система сбора данных представляет собой часть системы, которая обеспечивает сигналы, представляющие рабочие характеристики на поверхности насосной системы и характеристики невертикальной скважины, такие характеристики включают в себя глубину, азимут и наклон. Предусмотрен процессор, который принимает рабочие характеристики с характеристиками невертикальной скважины и генерирует карту поверхности, представляющую нагрузку сальникового штока как функцию положения сальникового штока на поверхности. Процессор генерирует функцию закона трения на основе характеристик невертикальной скважины. Процессор генерирует карту глубинного насоса как функцию карты на поверхности и функцию закона трении для волнового уравнения, которое описывает линейные вибрации в длинном штоке малого диаметра.
Процессор дополнительно включает в себя программное обеспечение для анализа карты насоса, которое формирует сигнал управления для управления насосной системой.
Волновое уравнение для невертикальной скважины представляет собой уравнение следующего вида

где


где С(x) представляет силу сопротивления штока или насосно-компрессорной колонны.
Контроллер также можно использовать для номинально вертикальной скважины, используя формулы (8)-(10), где С(x) модифицируют так, чтобы она соответствовала такой вертикальной скважине.
Краткое описание чертежей
Изобретение описано ниже со ссылкой на приложенные чертежи, на которых:
на фиг.1 показана схема частично в продольном разрезе, представляющая общую схему устройства предшествующего уровня техники в номинально вертикальной скважине;
на фиг.2 показан увеличенный вид сбоку, представляющий общую схему участка устройства возле подвески насосных штанг;
на фиг.3 показан график предшествующего уровня техники, представляющий карту поверхности и содержащий рассчитанную карту глубинного насоса для номинально вертикальной скважины;
на фиг.4 иллюстрируется наклонная скважина с улучшенным устройством управления скважины для определения глубинной карты для наклонной скважины в соответствии с изобретением;
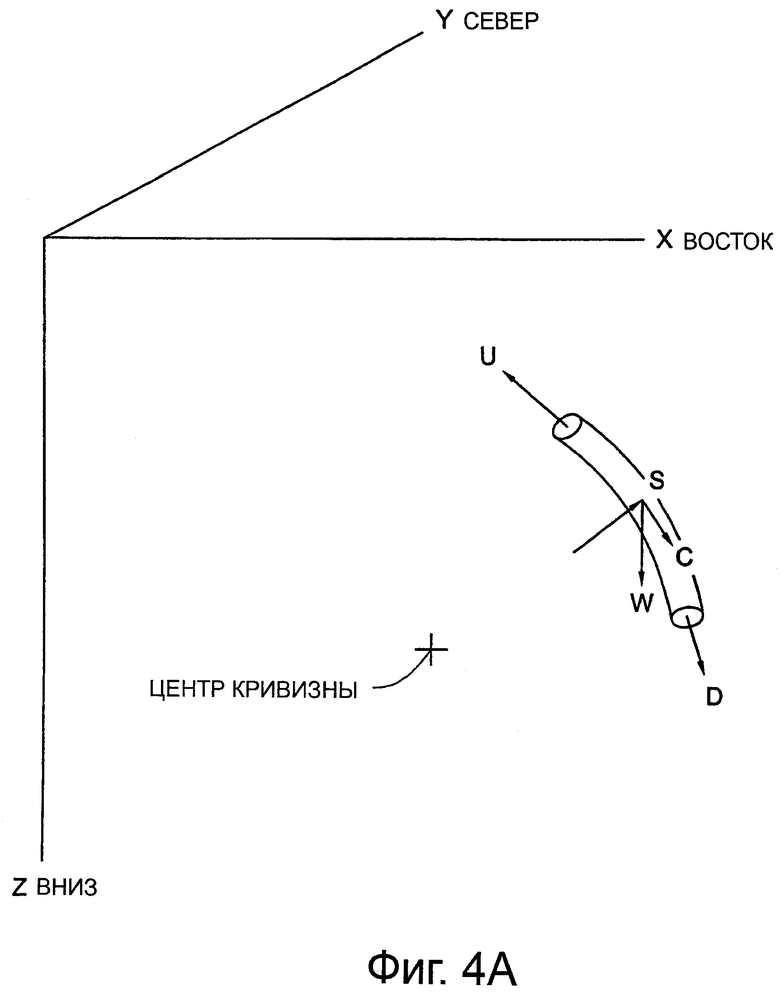
на фиг.4А иллюстрируются компоненты вектора в сечении наклонной скважины;
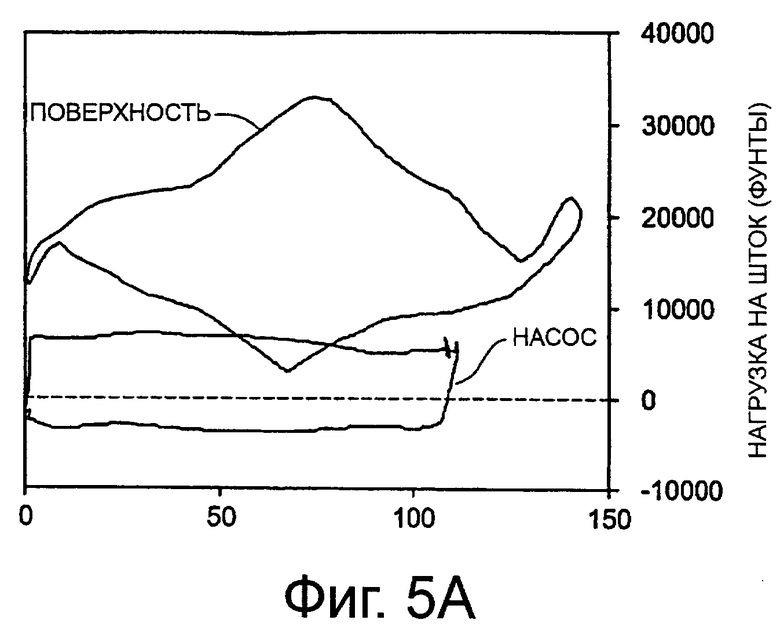
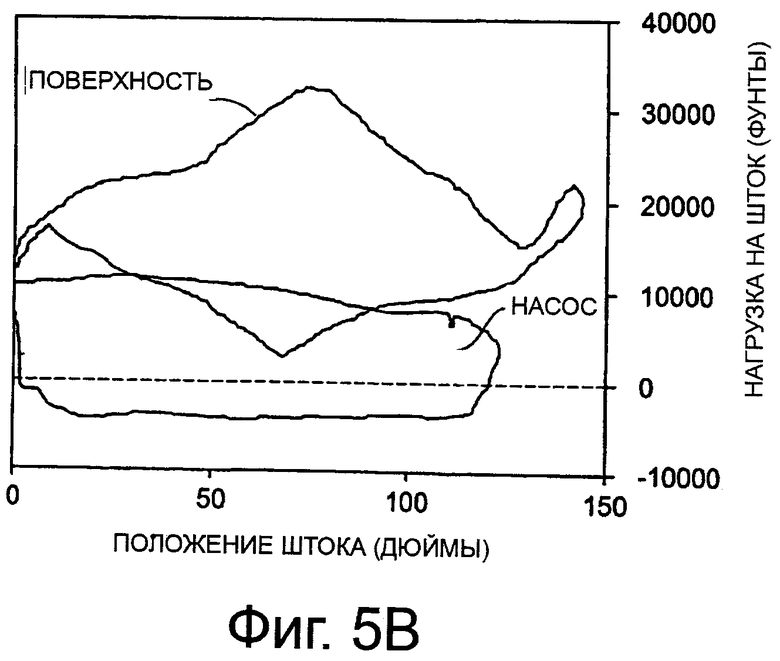
на фиг.5А показана карта насоса, рассчитанная в наклонной скважине с использованием способов в соответствии с настоящим изобретением, и для сравнения, на фиг.5В показана карта насоса той же наклонной скважины, рассчитанная с использованием способов предшествующего уровня техники, в которых предполагается вертикальная скважина;
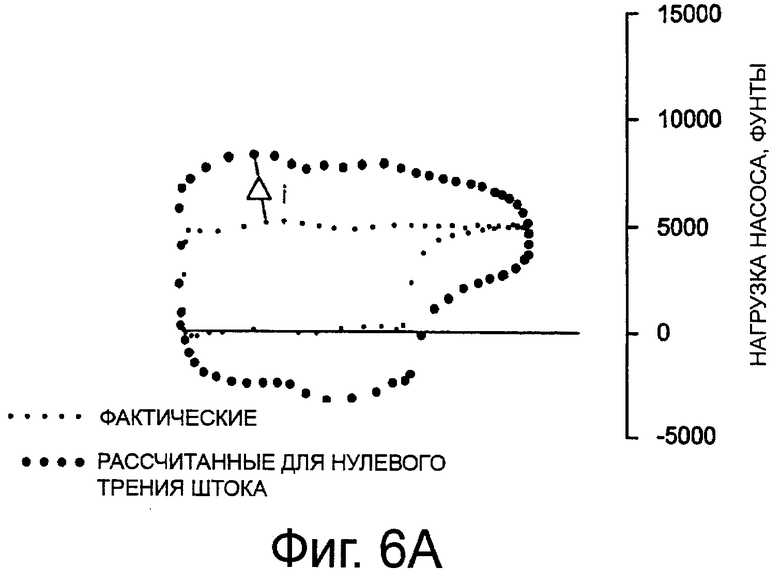
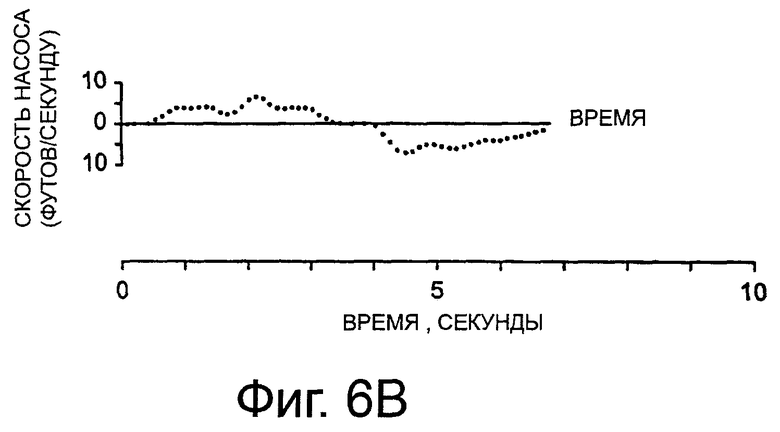
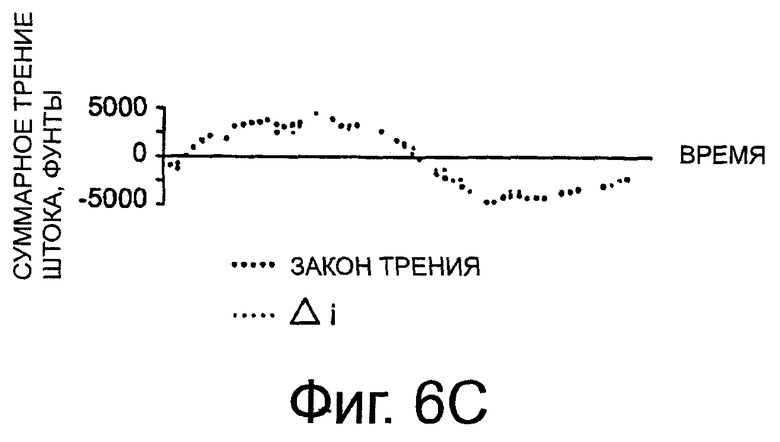
на фиг.6А, 6В и 6С графически иллюстрируется процедура вывода закона трения для наклонной скважины;
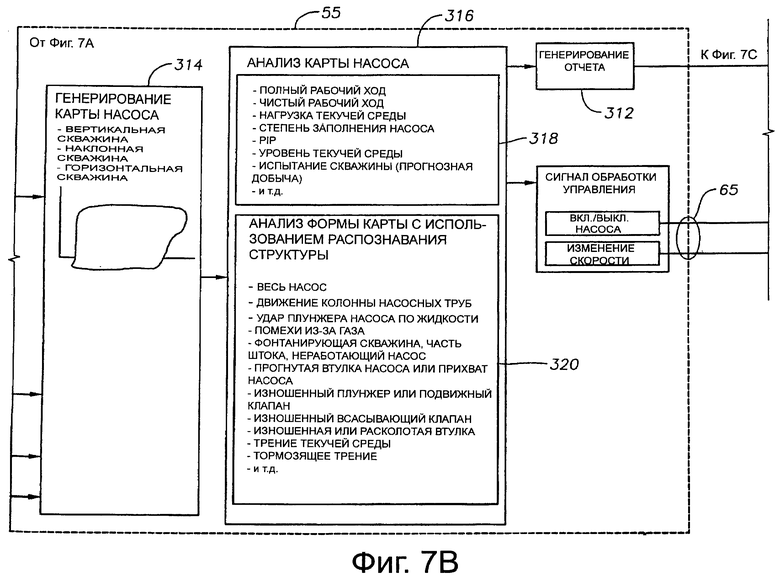
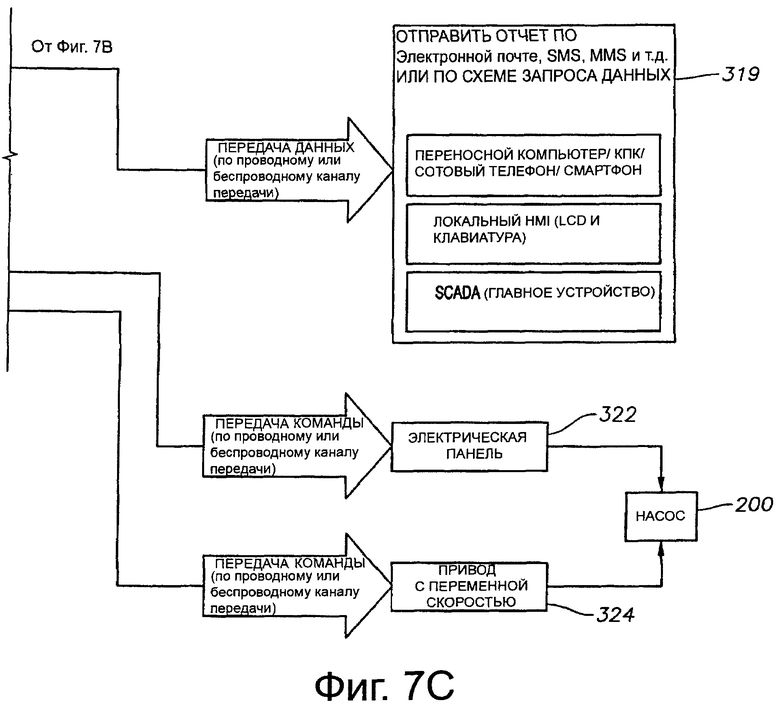
на фиг.7А, 7В и 7С показаны блок-схемы последовательности операций для расчетов и функций, выполняемых в улучшенном устройстве управления скважиной для управления насосом в наклонной скважине, и
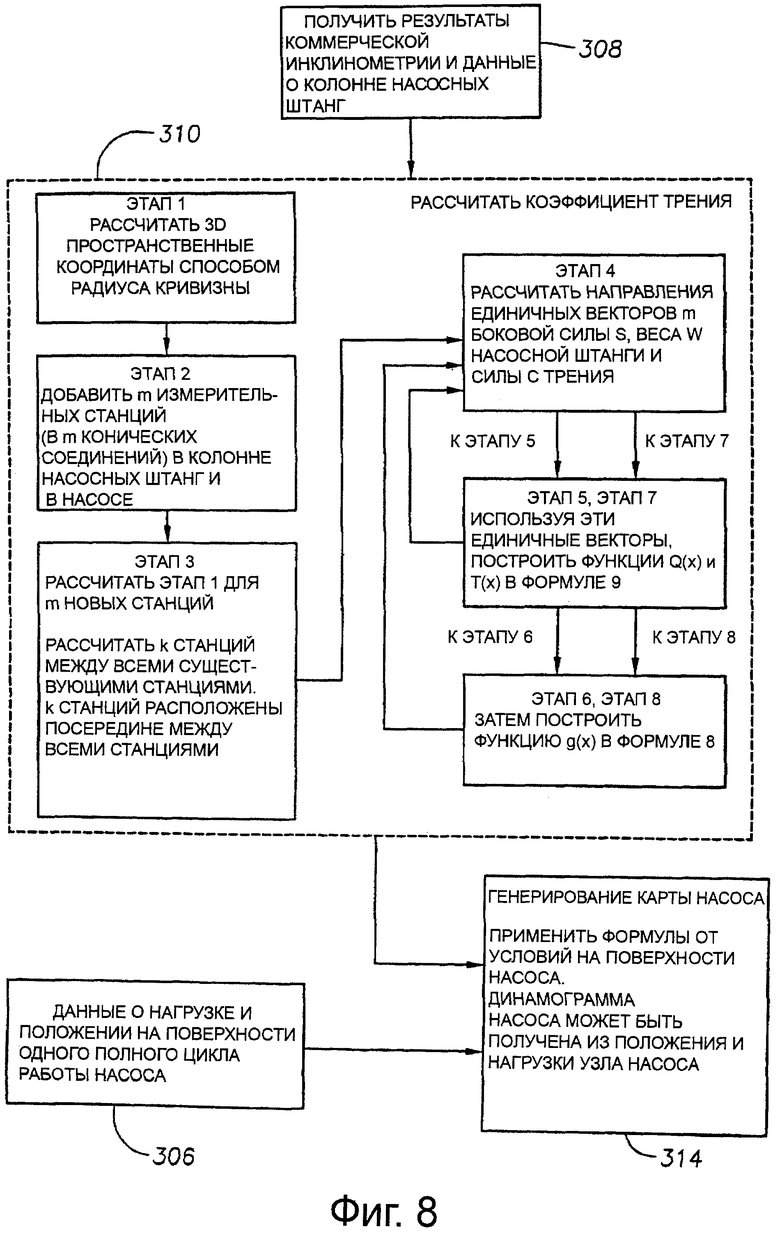
на фиг.8 иллюстрируются этапы для расчета коэффициента трения для моделирования наклонной скважины.
Подробное описание изобретения
На фиг.4 иллюстрируется глубинный штанговый насос, работающий в наклонной скважине 100. Номера ссылочных позиций, которые обозначают корпус, насос, насосные штанги и т.д. на фиг.4, являются теми же, которые используются для иллюстрации фиг.1 для вертикальной скважины, но сигналы 34 нагрузки и сигналы 36' смещения подают (либо, используя аппаратные средства, или по беспроводному каналу) в улучшенное устройство 55 управления скважиной для определения поверхностной карты и глубинной карты для наклонной скважины 100. Сигнал 65 управления генерируют в улучшенном устройстве 55 управления скважиной и подают в насос 200, используя аппаратные средства, или по беспроводному каналу.
Наклонная скважина, такая как на фиг.4, требует использования другой версии волнового уравнения, которая моделирует более сложные силы трения, прикладываемые штоком к колонне насосных труб,

где


где
ν = скорость звука в стали в футах/секунду;
c = коэффициент демпфирования, 1/секунду;
t = время в секунду;
x = расстояние точки свободного штока, измеренное от сальникового штока, в футах;
u(x,t) = смещение от положения равновесия насосной штанги в футах в момент времени t, и
g(x) = компонент веса насосной штанги в направлении X.
Член С(x) представляет силу трения насосной штанги 17 о колонну 11 насосных труб. Член g(x) веса насосной штанги обобщен до невертикального случая, где только компонент веса штока вносит вклад в осевую силу в штангах. Направление осевых усилий в насосной штанге определяют по сигналам глубины, азимута и наклона, полученным по результатам инклинометрии скважины во время бурения скважины. В наклонных скважинах используют расходуемые направляющие штанг для поглощения износа, который, в противном случае, происходил бы штангах и в колонне насосных труб. Функция µ(x) обеспечивает возможность вариаций трения вдоль насосных штанг 17 в зависимости от того, находятся ли направляющие насосных штанг или сами штанги в контакте с колонной 11 насосных труб. Оператор δ обеспечивает то, что силы трения всегда будут действовать противоположно движению насосных штанг. Боковые усилия на изогнутых участках колонны насосных штанг моделируют с помощью функции Q(x). Функция, зависимая от механического напряжения, также действует в направлении, противоположном направлению движения и представлена следующей формулой
Трение текучей среды моделируют с помощью члена
Коэффициент µ трения определен, как

Коэффициент трения изменяется при смазке и при изменении контактирующих материалов (например, направляющих насосных штанг, стального покрытия основания и т.д.). Оно может быть оценено, измерено или определено путем сопоставления характеристик.
В формулах (8), (9), (10) коэффициент µ трения может изменяться вдоль колонны насосных штанг в соответствии с контактирующими поверхностями.
Определение µ(x), Q(x) и Т(x) с помощью математического моделирования колонны насосных штанг
Функцию µ(x) и функцию Q(x) и Т(x) вначале определяют в математических моделях при компьютерном моделировании. На прямых участках скважины Q(x)≠0, и Т(x)=0. На изогнутых участках Q(x)≠0 и Т(x)≠0. Моделирование следует восьми этапам, как представлено в прямоугольниках 308, 310 логических выражений на фиг.8 и описано следующим образом.
Этап 1. Начать с коммерческой инклинометрии скважины (например, из логического прямоугольника 308), содержащей измеренную глубину (футы вдоль ствола скважины), наклон от вертикали (градусов) и азимут от направления на север (градусов). Такое исследование содержит определенное количество измерительных станций. Рассчитывают 3D пространственные координаты (x,y,z) каждой станции, используя любой способ. Способ (векторного) радиуса кривизны является предпочтительным. См. фиг.4А. Рассчитать (единичные) векторы касательных, фактическую вертикальную глубину и центры кривизны для каждой измерительной станции и пары измерительных станций.
Этап 2. Добавить измерительные станции в точках постепенного сужения в колонне насосных штанг и в насосе. Новые станции должны быть размещены на дуге, определенной центром кривизны станций, расположенных выше и ниже новой станции. Рассчитать те же количественные значения, которые были описаны на этапе 1.
Этап 3. Добавить дополнительные измерительные станции в средних точках между парами измерительных станций, описанных на этапе 2. Станции в средних точках должны попасть на дугу, определенную центром кривизны станций, расположенных выше и ниже. Рассчитать (единичные) векторы, которые определяют направление боковой силы S, силы W веса насосных штанг и силы С сопротивления, как показано на фиг.4А.
Этап 4. Применить действующую вниз силу в узле насоса (допустим 5000 фунтов), направление которой определено единичным вектором касательной в месте размещения насоса. На фиг.4А это представляет собой вектор D. Рассчитать боковую силу S, силу С трения и действующую направленную вверх осевую силу U из векторных уравнений


Символы || обозначают абсолютную величину вектора, находящегося между ними. Вектор W веса всегда действует в направлении вниз и имеет величину wΔx, где w представляет собой погонный вес насосных штанг (фунтов/фут), и Δx представляет собой длину насосных штанг между измерительными станциями.
Этап 5. Продолжить процесс путем перемещения вверх к следующей станции в средней точке. Отрицательная часть направленного вверх вектора U осевого усилия на этапе 4 становится направленным вниз вектором D осевого усилия. Возвращаться к этапу 4, до тех пор, пока не будет достигнута верхняя часть колонны насосных штанг. Записать результаты, определенные в каждой станции, расположенной в средней точке. Затем перейти на этап 6.
Этап 6. Возвратиться к этапу 4 и повторить процесс (этапы 4 и 5), за исключением того, что процесс начинается с большей нагрузкой в районе насоса, например 10000 фунтов. Этот второй эксперимент помогает определить чувствительность боковой нагрузки (следовательно, силы трения) к осевой нагрузке в насосных штангах.
Этап 7. Используя записанную информацию, построить функции Q(x) и Т(x), показанные в формуле 10.
Этап 8. Используя записанную информацию, построить функцию q(x) веса насосной штанги из формулы 8.
Разработка или диагностика наклонной скважины со штанговым насосом
Волновое уравнение (формула 8 с формулами 9 и 10), используют для разработки или диагностики наклонных скважин. Когда его используют для разработки, делают предположения об условиях на дне скважины для того, чтобы обеспечить возможность прогнозирования рабочих характеристик насосной штанговой установки. Для диагностики волновое уравнение используют для предположения условий на дне скважины, используя данные динамометра, собранные на поверхности. Значительные ошибки при прогнозировании или диагностике получают, если трение штанг не будет смоделировано должным образом. Это иллюстрируется со ссылкой на фиг.5А и 5В. Цель состоит в том, чтобы рассчитать карту насоса на дне скважины по поверхностным данным (то есть, задача диагностики). На фиг.5А показана карта насоса, рассчитанная в наклонной скважине, используя уравнение 8. На фиг.5В показана карта насоса, рассчитанная с использованием уравнения 1, как если бы скважина была вертикальной. Карта насоса на фиг.5В является неправильной. Обозначенный рабочий ход поршня насоса является слишком длинным, и нагрузка на нанос является слишком большой. Также форма карты насоса искажена. Карта насоса на фиг.5В представляет собой графическое обозначение теоремы Гиббса, как описано выше.
Один из способов определения точной карты для насоса наклонной скважины по фиг.4 представляет способ сегментирования скважины и получение верхней и нижней карт для каждого сегмента. Нижняя карта верхнего сегмента используется как верхняя карта для нижнего сегмента и так далее, до тех пор, пока не будет определена карта насоса (или требуемая точка внутри скважины). Каждый сегмент характеризуется разной функцией Q(x) боковой силы в соответствии с изогнутым сегментом колонны насосных штанг.
Используя гипотетические данные, становится возможным показать, как вывести более сложный закон трения для наклонной скважины. Пример, представленный ниже, относится к мелким скважинам, в которых общая скорость, по существу, является одинаковой на всех глубинах вдоль колонны насосных штанг. Последнее предложение в теореме Гиббса "Любая ошибка в законе трения вызывает ошибку в рассчитанной карте насоса" описывает эту процедуру. Наибольшая возможная ошибка преднамеренно сделана в рассчитанной карте насоса путем установки трения равным нулю в гипотетической скважине с насосом 2,50 дюйма, установленным на глубину 3375 футов. Модуль качалки С640-305-144 для глубинных насосов работает в установке, выполняя 8,81 рабочих тактов в минуту. Линейное трение вдоль колонны насосных штанг, как задано, должно быть равно 0,158 фунтов на фут длины насосной штанги на фут/секунду скорости насосной штанги. Таким образом, если скважина является мелкой, так что скорость насосной штанги остается приблизительно одинаковой вдоль всей штанги, общее трение, зависимое от скорости при 5 футах/секунду, составит 2666 фунтов [0,158 (3375) (5)=2666]. Зависимое от скорости трение действует противоположно направлению движения. Кроме того, задан компонент Кулона (независимый от скорости, но всегда противоположный направлению движения), равный 0,3 фунта/фут длины насосных штанг. Таким образом, общее сопротивление Кулона вдоль всей колонны насосных штанг составит 1013 фунтов [0,3 (3375)=1013]. Когда насосные штанги движутся вверх со скоростью 5 футов/секунду, сила, направленная вниз, равная 3679 фунтов, будет действовать на них. Когда насосные штанги движутся вниз со скоростью 5 футов/секунду, будет приложена направленная вверх сила трения, равная 3679 фунтов. Закон трения, используемый для формирования гипотетических данных, может быть записан следующим образом

На фиг.6А показаны две карты насоса, представленные в одном и том же масштабе нагрузки и положения и с общим исходным временем. Шестьдесят точек использовали для нанесения каждой карты с постоянным интервалом времени между точками. Функция ошибки определяется следующей формулой

в которой La(t)i представляет собой фактические (истинные) нагрузки насоса, полученные в соответствии с полностью выраженной программой прогноза, и L0(ti) представляет собой нагрузки насоса, рассчитанные с помощью технологии диагностики с нулевым трением. Δi представляет собой измеренную ошибку, вызванную использованием некорректного закона трения (нулевое трение) в соответствии с теоремой Гиббса. Поскольку трение бурильной колонны было установлено равным нулю, и скорость вдоль насосных штанг, по существу, является одинаковой в заданный момент времени (неглубокая скважина), Δi представляет общее трение вдоль длины колонны насосных штанг.
На фиг.6b показано изменение во времени скорости насоса, полученной так, чтобы она представляла локальную скорость в любом месте вдоль колонны насосных штанг.
Наконец, на фиг.6с показано изменение во времени величины Δi, и изменение во времени закона трения по формуле (12), используемой для создания этого гипотетического примера. Согласие между двумя временными диаграммами хорошее, но не идеальное. Не идеальные моменты вызваны тем, что даже в неглубокой скважине колонна насосных штанг растягивается таким образом, что допущение равных скоростей вдоль ее длины не является строго истинным. Тем не менее, это согласие достаточно хорошее для того, чтобы использовать теорему Гиббса для определения более сложных законов трения.
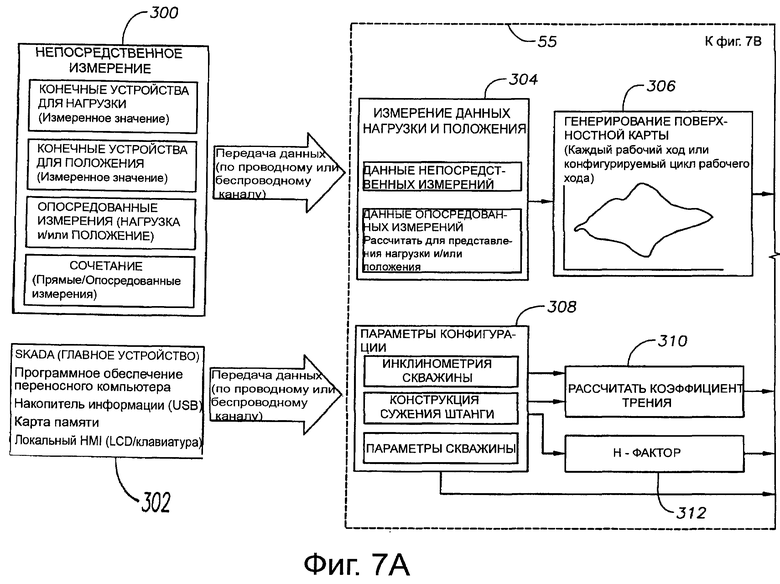
На фиг.7А и 7В схематично иллюстрируется в виде блок-схемы последовательности операций вид функций улучшенного устройства 55 управления скважиной. На фиг.7А в логическом прямоугольнике 300 показано, что данные нагрузки и положения измеряют непосредственно (например, данные нагрузки получают с помощью датчика нагрузки и данные положения получают с помощью потенциометра колонны штанг, инклинометра, лазера, RF, радарного датчика измерения расстояния/положения и т.д.), или измеряют опосредованно (то есть, рассчитывают на основе других входных данных). Такие данные применяют в логическом прямоугольнике 304, где данными нагрузки и положения управляют, и их конфигурируют. Эти данные передают в генератор 306 карты на поверхности, где данные положения и нагрузки коррелируют для каждого цикла возвратно-поступательных движений штангового насоса.
В логическом прямоугольнике 302 иллюстрируется, что данные, введенные из различных устройств, передают в логический прямоугольник 308, где сохраняют данные о насосе и скважине. Инклинометрия скважины включает в себя данные глубины, азимута и наклона в каждой точке вдоль скважины. Информация разработки сужения насосных штанг и инклинометрия используются для расчета коэффициента трения, как описано выше со ссылкой на фиг.8, для расчета карты насоса наклонной скважины или горизонтальной скважины. Информация о конструкции сужения насосных штанг используется в логическом прямоугольнике 312 для определения Н-фактора, используемого при генерировании карты насоса в логическом прямоугольнике 314.
Определение Н факторов, используемых для получения числового решения волнового уравнения
Н факторы представляют собой безразмерные коэффициенты для узловых положений насосных штанг, используемых при численном решении волнового уравнения. Они не изменяются со временем и могут, таким образом, быть заранее рассчитаны перед тем, как будет начато решение в реальном времени. Это экономит время расчетов на компьютере и помогает сделать выполнимыми на практике варианты выполнения процесса на микрокомпьютерах на месте буровой площадки. Начинают с волнового уравнения для наклонных скважин

Н факторы получают путем замены частных производных в уравнении (8) на аппроксимацию частной разностью, как представлено ниже:


Правосторонняя разность уравнения 10.5 имеет вид,
u(x+Δx,t)0=H1u(x,t+Δt)-H2u(x,t)+H3u(x,t-Δt)-u(x-Δx,t),
где



Колонны насосных штанг могут быть выполнены из различных отрезков, называемых расширенными хвостовиками. Расширенный хвостовик определен диаметром насосной штанги, длиной и ее материалом. Таким образом, количественные значения H должны быть заранее рассчитаны для каждого расширенного хвостовика. Когда подставляют более полные определения количественных характеристик, используемых в значениях H, получают
Скорость распространения:

Коэффициент трения штанга - текучая среда:


количественные значения H получают для каждого расширенного хвостовика.
Значения Н не включают в себя члены C(x) и g(x) уравнения (8). Их обрабатывают отдельно, как описано ниже.
Задачи прогнозирования и диагностики решаются различными формулами частной разности. Для прогнозирования (задача SROD для наклонного случая) необходимо приращение по времени. Таким образом, уравнение (8) решается для u(x, t+Δt). В результате получают другой набор значений Н, чем описан выше. Условия в глубинном насосе известны по граничным условиям в задаче прогнозирования. Для задачи диагностики (задача DIAG для наклонного случая) необходимо рассчитать условия насоса, которые неизвестны. Как показано выше, уравнение (8) решается для u(x+Δ, t). Из первого граничного условия положение узла насосной штанги на поверхности (atx=0) известно для всего времени t. Из второго граничного условия и закона Гука, положение штока во втором узле (x=Δx) также может быть рассчитано для всего времени t. В результате, можно начать решение, и может быть рассчитано положения узлов на всем протяжения до насоса. Это позволяет установить общую нагрузку на насос и положение, которое содержит глубинную карту насоса.
Другая функция Н, Н4, не включена в формат решения волнового уравнения. Она также представляет собой заранее рассчитанное значение, которое используется только при расчете нагрузки на трение колонны насосных штанг.
Данные, относящиеся к поверхностной карте из прямоугольника 306, коэффициент трения в скважине из прямоугольника 310, Н-фактор из прямоугольника 312 и данные параметра скважины применяют для генератора 314 карты насоса. Компьютерное моделирование используется для построения функций Q(x) и T(x). Эти функции описывают кулоновское тормозящее трение между штангой и колоннами насосных труб. Производную в уравнении (8) заменяют конечной разностью,

и эффект кулоновского трения вводят в решение частной разности, используя
u(x+Δx,t)=H1u(x,t+Δ)-H2u(x,t)+H3u(x,t-Δt)-u(x-Δs,t)
+H4C(x)
Аппроксимацию конечных разностей к частной производной в уравнении (8) рассчитывают на предыдущем временном этапе. Такой компромисс исключает математические трудности, но приводит к незначительным потерям точности результатов. Время обработки в компьютере уменьшается.
Карты насоса для наклонных и горизонтальных скважин генерируют в соответствии с формулами 8, 9, 10, с коэффициентом трения, определенным, как описано выше. Карты насоса для вертикальных скважин генерируют также в соответствии с формулами 8, 9, 10, но используя скорее коэффициент трения, соответствующий вертикальной скважине, вместо процедуры, описанной выше наклонной скважины.
После определения карты насоса ее анализируют для определения множества параметров насоса, как обозначено в прямоугольнике 318. Распознавание структур формы насоса обозначает возможные проблемы насоса, как обозначено в прямоугольнике 320. В патенте США 6857474 авторов Bramlett и др. (приведен здесь по ссылке) иллюстрируются различные формы глубинной карты, представляющие различные состояния насоса.
Устройство управления скважиной генерирует отчет, содержащий состояние скважины, как обозначено прямоугольником 312 генератора отчетов, и передает этот отчет наружу и через электронную почту, sms, mms и т.д., или делает его доступным для схемы передачи данных по запросу через проводной или беспроводный канал передачи данных. См. прямоугольник 319. Он также генерирует сигнал/команду 65 управления, которая должна быть применена или передана (по проводному или беспроводному каналу передачи) в электрическую панель 322, для ВКЛЮЧЕНИЯ/ВЫКЛЮЧЕНИЯ питания, которое приложено к насосу 200, для управления им в зависимости от анализа карты насоса.
Управление может представлять собой сигнал/команду 65 выключения насоса, поданную или переданную (по проводному или беспроводному каналу передачи) в электрическую панель 322 насоса 200 или сигнал/команду изменения скорости, поданную или переданную (по проводному или беспроводному каналу передачи), например, в привод 324 с переменной частотой.
Изобретение относится к измерительным системам для оценки работы системы возвратно-поступательного насоса, с помощью которой добывают углеводороды из невертикальной или вертикальной скважины. Измерительная система периодически формирует глубинную карту насоса как функцию прямо или опосредованно измеренной поверхностной карты и функцию закона трения, полученного из волнового уравнения, которое описывает линейные вибрации в длинной тонкой насосной штанге. Сигнал управления или сигнал команды генерируют на основе характеристики глубинной карты насоса для управления насосной системой. Она также генерирует отчет об анализе насоса и скважины, который используется для управления насосом и определения его состояния. Обеспечивается улучшенный контроллер, который определяет карту глубинного насоса для наклонной скважины на основе измерений поверхности и для управления штанговым насосом. 2 н. и 11 з.п. ф-лы, 14 ил.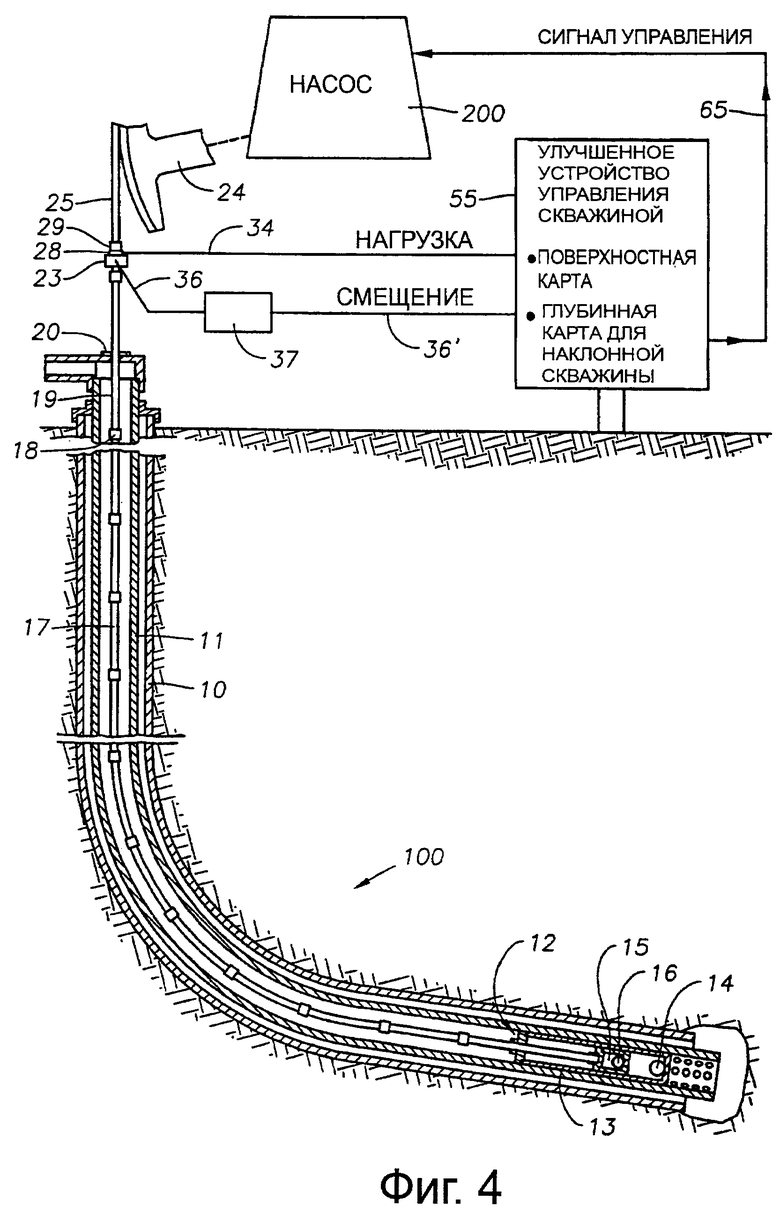
1. Измерительная система для оценки работы системы возвратно-поступательного насоса (200) для добычи углеводородов из невертикальной скважины, проходящей от поверхности вглубь земли, содержащая
систему (300, 304) сбора данных, выполненную с возможностью предоставления сигналов, представляющих рабочие характеристики на поверхности насосной системы и характеристики упомянутой невертикальной скважины,
процессор (306), выполненный с возможностью приема упомянутых рабочих характеристик с упомянутыми характеристиками упомянутой невертикальной скважины и генерирования поверхностной карты, представляющей нагрузку на сальниковый шток на поверхности как функцию положения сальникового штока на поверхности, при этом
процессор выполнен с возможностью определять функцию закона трения на основе упомянутых характеристик упомянутой невертикальной скважины, и
процессор выполнен с возможностью периодически генерировать глубинную карту насоса как функцию упомянутой поверхностной карты и упомянутой функции закона трения для волнового уравнения, описывающего линейные вибрации в длинной тонкой насосной штанге, при этом волновое уравнение для наклонной скважины имеет вид

где 

где C(x) - сила трения штанги о колонну насосных труб и где
ν = скорость звука в стали в футах/секунду;
c = коэффициент демпфирования, 1/секунду;
t = время в секундах;
x = расстояние точки свободного штока, измеренное от сальникового штока, в футах;
u(x,t) = смещение от положения равновесия насосной штанги в футах в момент времени t, и
g(x) = вес насосного узла с насосной штангой в направлении X,
µ(x) = коэффициент трения между насосной штангой и колонной труб;
Q(x) = боковое усилие на изогнутых участках насосных штанг; и
Т(x) = механическое напряжение в насосной штанге,
при этом
функции µ(x), Q(x) и Т(x) определяются путем математического моделирования колонны насосных штанг в указанной скважине
2. Система по п.1, в которой процессор содержит программное обеспечение для анализа карты насоса, выполненное с возможностью вырабатывать сигнал управления для управления упомянутым насосом.
3. Система по п.1, в которой
программное обеспечение для анализа карты насоса выполнено с возможностью вырабатывать сигнал управления для выключения двигателя привода упомянутого насоса при распознавании показателя карты насоса, требующего отключения насоса.
4. Система по п.1, в которой
программное обеспечение для анализа карты насоса выполнено с возможностью вырабатывать сигнал управления для управления переменной скоростью насоса при распознавании показателя карты насоса, указывающего, что изменение скорости насоса улучшит работу насоса.
5. Измерительная система для оценки работы системы возвратно-поступательного насоса (200) для добычи углеводородов из скважины, проходящей от поверхности вглубь земли, содержащая,
систему (300, 304) сбора данных, выполненную с возможностью приема упомянутых характеристик упомянутой скважины и включающую в себя процессор (65), выполненный с возможностью генерирования поверхностной карты, представляющей нагрузку на сальниковый шток на поверхности как функцию положения сальникового штока на поверхности, при этом
процессор (65) выполнен с возможностью определять функцию закона трения для упомянутой скважины,
процессор (65) выполнен с возможностью периодически генерировать глубинную карту насоса по упомянутой поверхностной карте как функцию упомянутой поверхностной карты и коэффициента закона трения для волнового уравнения, описывающего вибрации в длинной тонкой насосной штанге, причем волновое уравнение имеет вид

где

где C(x) - сила трения штанги о колонну насосных труб и где
ν = скорость звука в стали в футах/секунду;
c = коэффициент демпфирования, 1/секунду;
t = время в секундах;
x = расстояние точки свободного штока, измеренное от сальникового штока, в футах;
u(x,t) = смещение от положения равновесия насосной штанги в футах в момент времени t, и
g(x) = вес насосного узла с насосной штангой в направлении X,
µ(x) = коэффициент трения между насосной штангой и колонной труб;
Q(x) = боковое усилие на изогнутых участках насосных штанг; и
Т(x) = механическое напряжение в насосной штанге,
при этом
функции µ(x), Q(x) и T(x) определяются путем математического моделирования колонны насосных штанг в указанной скважине.
6. Система по п.5, в которой
упомянутая скважина является по существу вертикальной, а коэффициент закона трения представляет характеристику трения насосной штанги в вертикальной скважине.
7. Система по п.5, в которой
упомянутая скважина является невертикальной, а коэффициент закона трения представляет характеристику трения насосной штанги в невертикальной скважине.
8. Система по п.5, в которой
процессор включает в себя программное обеспечение для анализа карты насоса, выполненное с возможностью выработки сигнала управления для управления упомянутым насосом.
9. Система по п.5, в которой
программное обеспечение для анализа карты насоса выполнено с возможностью вырабатывать сигнал управления для выключения двигателя привода упомянутого насоса при распознавании показателя карты насоса, требующего отключения насоса.
10. Система по п.5, в которой
программное обеспечение для анализа карты насоса выполнено с возможностью вырабатывать сигнал управления для управления переменной скоростью насоса при распознавании показателя карты насоса, указывающего, что изменение скорости насоса улучшит работу насоса.
11. Система по п.8, характеризующаяся тем, что выполнена с возможностью подачи упомянутого сигнала управления к упомянутому насосу либо через проводное, либо через беспроводное устройство.
12. Система по п.8, в которой
программное обеспечение для анализа карты насоса выполнено с возможностью вырабатывать сводный отчет о характеристиках карты насоса, при этом система дополнительно содержит
модуль передачи данных, выполненный с возможностью передачи упомянутого сводного отчета из упомянутой системы насоса в удаленное место.
13. Система по п.8, в которой
процессор (65) географически удален от упомянутого возвратно-поступательного насоса (200) со штоком и выполнен с возможностью принимать упомянутые характеристики беспроводным образом от упомянутой системы (300, 304) сбора данных, и
процессор (65) выполнен с возможностью передавать упомянутый сигнал управления беспроводным образом упомянутому насосу.
| US2005155759A1, 21.07.2005 | |||
| US3343409A, 26.09.1967 | |||
| US5252031A, 12.10.1993 | |||
| US5431230A, 11.07.1995 |

