Изобретение относится к радиотехнике, в частности к радиопеленгации, и может быть использовано для определения местоположения воздушных судов (объектов) по их радиоизлучениям.
Для двухмерного пеленгования воздушных объектов по излучению бортовых УКВ передатчиков применяют инвариантные к направлению прихода сигнала кольцевые решетки, которые располагают параллельно и вблизи земной поверхности, на высоте 5-6 м от нее. По принятым сигналам определяют азимут и угол места объекта.
Известен фазовый способ радиопеленгования, включающий прием сигналов бортового передатчика воздушного объекта с помощью антенн, образующих кольцевую решетку, измерение фаз принятых сигналов, их реконструкцию с устранением цикличности фазовых измерений и расчет азимута и угла места по реконструированным фазам (Саидов А.С., Тагилаев А.Р., Алиев Н.М., Асланов Г.К. Проектирование фазовых автоматических пеленгаторов. М.: «Радио и связь», 1997, с.10, 51-52)
Основным недостатком способа является низкая точность измерения угла места вблизи нулевого значения, так как погрешности измерения обратно пропорциональны его синусу. При интерференции прямой и отраженной от земной поверхности волны пеленгуется энергетический центр лучей со значительными флуктуациями. Другой недостаток состоит в сложности выполнения операции реконструкции фаз.
Известен способ пеленгования, включающий прием сигнала с помощью ненаправленных антенн, образующих кольцевую решетку, измерение разности фаз между сигналами в двух группах, векторы, соединяющие пары антенн в которых коллинеарны, а по совокупности разностей фаз в группах методом многошкальных измерений оценивают однозначные на расстоянии диаметра решетки набеги фаз, по которым рассчитывают азимут и угол места (Патент РФ №2251707, 2005 г., МПК7 G01S 3/00)
В данном способе исключается операция реконструкции фаз, но основной недостаток предыдущего аналога (низкая точность измерения угла места) не устраняется.
Из известных способов наиболее близким к предлагаемому по технической сущности является способ двухмерного пеленгования, включающий прием сигналов бортового передатчика воздушного объекта с помощью антенн, образующих кольцевую решетку, располагаемую вблизи и параллельно земной поверхности, и определение по принятым сигналам азимута и угла места объекта. При этом измеряют комплексные амплитуды принятых сигналов с преобразованием в двухмерный угловой спектр, а азимут и угол места определяют как положение его максимума. Причем преобразование в двухмерный угловой спектр включает: умножение измеренных комплексных амплитуд на комплексно-сопряженные двухмерные диаграммы направленности, суммирование результатов умножения по совокупности антенн решетки и определение квадрата модуля суммы. Диаграммы направленности определяют применительно к условиям распространения радиоволн в свободном пространстве по формуле: 
В данном способе достигается потенциальная точность и предельная чувствительность измерения азимута, но сохраняется основной недостаток способов-аналогов: низкая точность измерения угла места, особенно вблизи его нулевого значения. Определенную сложность вызывает выполнение операции двухмерного преобразования сигналов в угловой спектр.
Технической задачей данного изобретения является повышение точности измерения угла места.
Поставленная задача решается за счет того, что в известном способе пеленгования воздушного объекта, включающем прием сигналов бортового передатчика с помощью антенн, образующих кольцевую решетку, располагаемую вблизи и параллельно земной поверхности, определение по принятым антеннами решетки сигналам азимута объекта, измерение комплексных амплитуд принятых сигналов и преобразование измерений в угловой спектр путем умножения на комплексно-сопряженные диаграммы направленности антенн, суммирования результатов умножения по совокупности антенн и определения квадрата модуля суммы, новым является то, что сигналы принимают одновременно с помощью дополнительных антенн, располагаемых на нормали к плоскости решетки из ее центра, угловой спектр нормируют на сумму квадратов модулей диаграмм направленности антенн и определяют угол места объекта, как положение максимума нормированного углового спектра, при этом диаграммы направленности антенн определяют в направлении полученного азимута и с учетом отражения радиоволн от земной поверхности по формуле: 






Решение поставленной технической задачи основывается на учете в диаграммах направленности антенн как прямого, так и отраженного от земной поверхности луча, различий набегов фаз сигналов в антеннах решетки и поднятых над ней антеннах, пропорциональных соответственно косинусу и синуса угла места прихода радиоволн. При определении углового спектра компенсируют набеги фаз совокупности прямой и отраженной волны, что позволяет выполнять когерентное суммирование по совокупности антенн, а возникающие вследствие сложения лучей направленные свойства по углу места учитывают нормировкой на сумму квадратов модулей диаграмм направленности. Тем самым достигается формирование максимума нормированного углового спектра в точке истинного угла места объекта со снижением погрешности его измерения. Существенным является также осевая симметрия антенной системы. Это позволяет определять азимут одним из известных способом по сигналам кольцевой решетки, а угол места путем однопараметрической максимизации нормированного углового спектра в направлении измеренного азимута. Последним исключается процедура определения и максимизации двухмерного углового спектра способа-прототипа с сокращением числа выполняемых операций по обработке сигналов.
Учет указанных закономерностей в соответствии с предложенными новыми действиями, условиями и порядком их выполнения позволяет решить поставленную техническую задачу: повысить точность измерения угла места.
Указанные преимущества, а также особенности настоящего изобретения поясняются вариантом его выполнения со ссылками на прилагаемые чертежи.
На фиг. 1 представлена структурная схема радиопеленгатора для реализации заявленного способа;
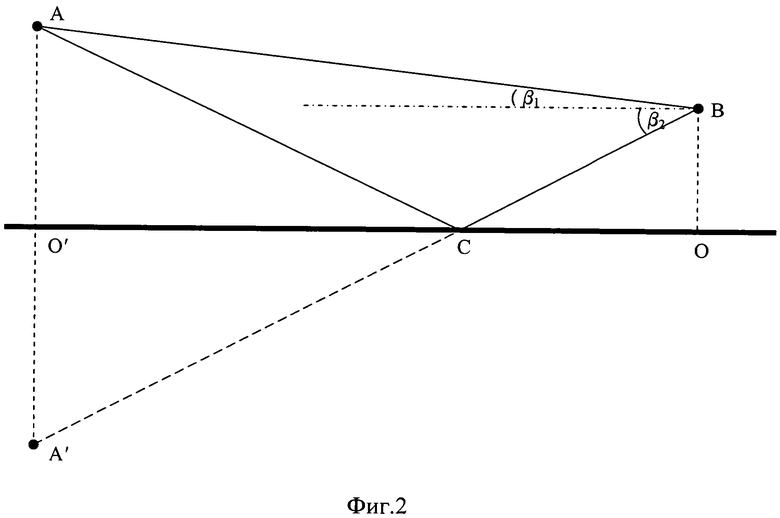
на фиг. 2 показана схема распространения радиоволн;
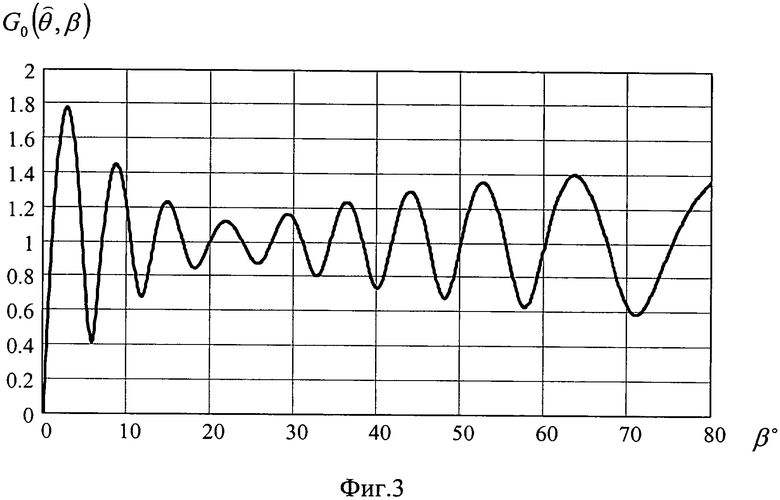
на фиг. 3 - диаграмма направленности антенны с учетом отражения радиоволн от земной поверхности;
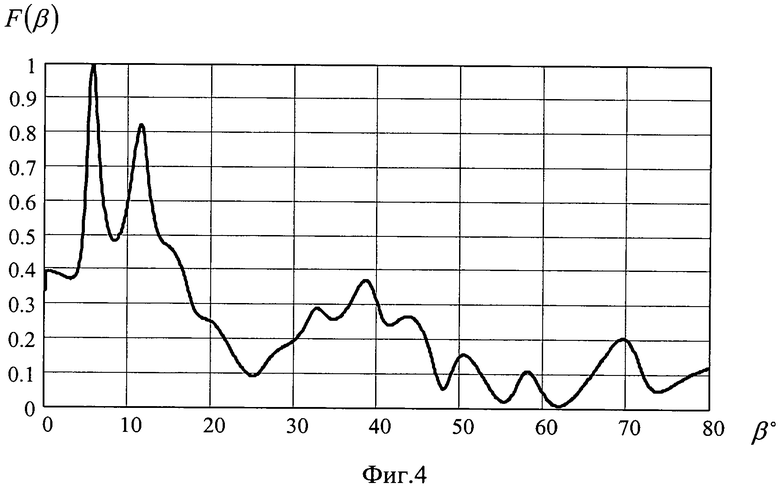
на фиг. 4 - нормированный угловой спектр;
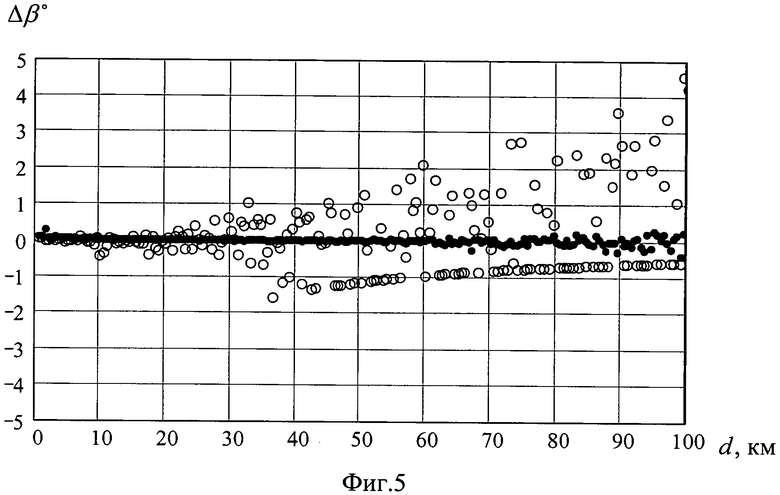
на фиг. 5 - зависимости погрешности измерения угла места от дальности до объекта;
на фиг. 6 - зависимости погрешности определения дальности от ее истинного значения.
Радиопеленгатор для реализации заявленного способа (фиг. 1) содержит антенны 1.0-1.N′-1 подключенные к входам 0-N′-1 радиоприемного устройства 2, выходами 0-N-1 соединенного с одноименными входами блока 3 определения азимута и анализатора углового спектра 4, входы N-N′-1 которого подключены к одноименным выходам радиоприемного устройства 2, а вход N′ - к первому выходу блока 5 определения диаграмм направленности, устройство определения максимума 6, блок определения коэффициента отражения 7 и индикатор 8. Выход блока определения азимута 3 подключен к первым входам блока определения диаграмм направленности 5 и индикатора 8 и второму входу блока определения коэффициента отражения 7, соединенного с первым входом со вторым выходом блока определения диаграмм направленности 5, а выходом - со вторым входом этого блока. Анализатор углового спектра 4, устройство определения максимума 6 последовательно подключены ко второму входу индикатора 8.
Радиоприемное устройство 2 многоканальное с числом каналов, равным общему числу антенн N′, выполняет фильтрацию и синхронное преобразование принятых сигналов с цифровым измерением и представлением в виде комплексных амплитуд (квадратурных составляющих), например, по варианту, приведенному в (Побережский К.С. Цифровые радиоприемные устройства. М., Радио и связь, 1987, с. 67-68, рис. 3.140)
Антенны 1.0-1.N-1 образуют кольцевую эквидистантную решетку с числом антенн N≥3. Радиус решетки ρ устанавливают из условия не превышения расстояния между ближайшими антеннами половины длины волны излучения. Решетку ориентируют опорной 1.0 антенной на Север. Фазовые центры антенн решетки располагают в одной горизонтальной плоскости на высоте h над земной поверхностью, порядка 5-6 м. Дополнительные антенны 1.N-1.N′-1 устанавливают на нормали к плоскости решетки из ее центра, например, с постоянным шагом δh. Тогда высота поднятия дополнительных антенн над плоскостью решетки будет Δhn=δh·(n+1-N), где n=N, …, N′-1 - номер дополнительной антенны, N′ - общее число антенн. А высота поднятия антенн решетки с номерами n=0, …, N-1 и дополнительных антенн с номерами n=N, …, N′-1 над Землей определяются соотношениями: hn-h при n=0, …, N-1 и hn=h+Δhn при n=N, …, N′-1.
В соответствии со схемой распространения радиоволн (фиг. 2) в пункт пеленгования В от бортового передатчика А приходит прямая волна по пути АВ и отраженная от земной поверхности по пути АСВ или эквивалентному ему А′СВ. На рисунке толстой линией показана земная поверхность, точка А′ - фиктивный излучатель под поверхностью, С - точка отражения, β1=β, β2=-β - углы места прихода прямой и отраженной волны. Высота h подъема плоскости решетки над земной поверхностью определяется отрезком ВО. Обозначим: d - удаление излучателя от пеленгатора по земной поверхности (отрезок OO′), 
В соответствии с методом зеркального изображения (Грудинская Г.П. Распространение радиоволн. М., «Высш. школа», 1975, с.45-47) и геометрическими построениями (фиг. 2) мгновенные значения напряженности поля, принимаемого антеннами, определяются соотношением

где 
Комплексные диаграммы направленности антенн определяют с учетом отражения радиоволн от земной поверхности по формуле

где 



Удаление точки отражения С (фиг. 2) от пеленгатора не превышает дальности прямой видимости и при высоте поднятия решетки h=5 …6 м составляет величину 


где 
Для однородной в окрестности пеленгатора земной поверхности зависимость от азимута в формуле (3) исключается. Для волн УКВ-сантиметрового диапазона земная поверхность по своим свойствам близка к диэлектрику и возможно упрощенное определение коэффициента отражения в виде постоянной величины 
Непосредственно пеленгование воздушного объекта происходит следующим образом. Излучение бортового передатчика принимают антеннами 1.0-1.N′-1 и в радиоприемном устройстве 2 измеряют их комплексные амплитуды 




Для расчетного азимута (4), поступающего с выхода блока определения азимута 3 на второй вход, и возможного положения объекта по углу места, поступающего со второго выхода блока определения диаграмм направленности 5 на первый вход, в блоке 7 определения коэффициента отражения рассчитывают значение коэффициента по формуле (3). После чего в блоке 5 определения диаграмм направленности рассчитывают по формуле (2) комплексные диаграммы направленности антенн 
В анализаторе углового спектра 4 по измеренным комплексным амплитудам всех принятых сигналов, поступающим по входам 0-N′-1 и значениям диаграмм направленности по входу N′ с первого выхода блока 5, определяют нормированный угловой спектр как функцию угла места
В соответствии с формулой (5) при этом умножают измеренные комплексные амплитуды 
В устройстве определения максимума 6 определяют угол места объекта как положение максимума нормированного углового спектра. Результаты определения пеленга (вход 1 индикатора 8) и угла места (вход 2) отражают на индикаторе 8.
Эффективность изобретения выражается в повышении точности измерения угла места. Количественная оценка выполнена методом имитационного моделирования для следующих условий.
Исследовался радиопеленгатор, размещенный на ледяной поверхности с относительной диэлектрической проницаемостью, равной 5, и удельной проводимостью 0,05 Ом/м, и содержащий 8-элементную антенную решетку радиусом 0,5 м, поднятую на мачте высотой 5 м, и две дополнительные антенны, установленные над решеткой на высоте 1 и 2 м. Задана предельная чувствительность пеленгования 2 мкВ/м. Высота воздушного объекта 1000 м, мощность передатчика 10 Вт, длина волны излучения 1 м. Расчет коэффициента отражения выполнялся по формуле (3). Моделирующая программа разработана в системе Mathcad, имеется у авторов и патентообладателя.
Результаты показаны на фиг. 5 в виде зависимости погрешности измерения угла места Δβ от дальности d до объекта для способа-прототипа кружками, для предлагаемого решения - точками. Видно, что погрешности измерений в предлагаемом способе примерно на порядок меньше. Более наглядно эффект от предлагаемого изобретения показан на фиг. 6 в виде зависимости оценочной дальности от ее истинного значения. Оценочная дальность определяется по измеренному углу места 

| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДВУХМЕРНОГО ПЕЛЕНГОВАНИЯ | 2018 |
|
RU2711341C1 |
| СПОСОБ МЕСТООПРЕДЕЛЕНИЯ НАД ЗЕМНОЙ ПОВЕРХНОСТЬЮ ИЗЛУЧАТЕЛЯ ИЛИ ПЕЛЕНГАТОРНЫХ АНТЕНН | 2019 |
|
RU2711400C1 |
| СПОСОБ ДВУХМЕРНОГО ПЕЛЕНГОВАНИЯ ВОЗДУШНОГО ОБЪЕКТА | 2013 |
|
RU2535174C1 |
| СПОСОБ ПЕЛЕНГОВАНИЯ С ПОВЫШЕННОЙ РАЗРЕШАЮЩЕЙ СПОСОБНОСТЬЮ | 2010 |
|
RU2491569C2 |
| Способ радиолокации | 2016 |
|
RU2692467C2 |
| ОДНОЭТАПНЫЙ МЕТОД ПЕЛЕНГОВАНИЯ ИСТОЧНИКОВ ИЗЛУЧЕНИЯ В ДКМВ ДИАПАЗОНЕ С ПРИМЕНЕНИЕМ ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКИ, СОСТОЯЩЕЙ ИЗ ВЗАИМНО ОРТОГОНАЛЬНЫХ СИММЕТРИЧНЫХ ГОРИЗОНТАЛЬНЫХ ВИБРАТОРОВ | 2016 |
|
RU2614035C1 |
| СПОСОБ ПОЛЯРИЗАЦИОННОГО ПЕЛЕНГОВАНИЯ РАДИОСИГНАЛОВ С ИСПОЛЬЗОВАНИЕМ ТРИОРТОГОНАЛЬНОЙ АНТЕННОЙ СИСТЕМЫ | 2018 |
|
RU2702102C1 |
| СПОСОБ РАДИОПЕЛЕНГОВАНИЯ | 1999 |
|
RU2158001C1 |
| СПОСОБ ПОЛЯРИЗАЦИОННОГО ПЕЛЕНГОВАНИЯ РАДИОСИГНАЛОВ | 2016 |
|
RU2624449C1 |
| СПОСОБ ПОЛЯРИЗАЦИОННОГО ПЕЛЕНГОВАНИЯ РАДИОСИГНАЛОВ С ИСПОЛЬЗОВАНИЕМ ТРИОРТОГОНАЛЬНОЙ АНТЕННОЙ СИСТЕМЫ | 2019 |
|
RU2713866C1 |
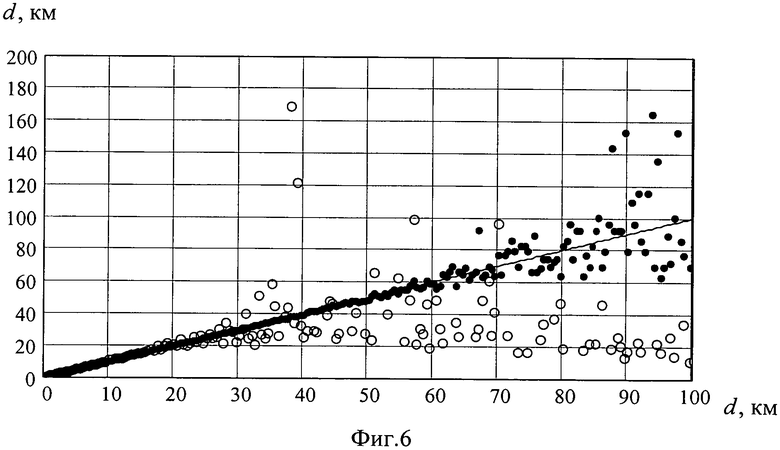
Изобретение относится к радиотехнике и может быть использовано для определения местоположения воздушных судов (объектов) по их радиоизлучениям. Достигаемый технический результат - повышение точности измерения угла места примерно на порядок с расширением области надежного определения дальности с 30 км до 70-80 км, что упрощает, делает более надежным и безопасным привод воздушного судна на необорудованные аэродромы, буровые площадки. Указанный результат достигается за счет того, что способ включает прием сигналов бортового передатчика с помощью антенн, образующих кольцевую решетку, располагаемую вблизи и параллельно земной поверхности, определение по принятым антеннами решетки сигналам азимута объекта, измерение комплексных амплитуд принятых сигналов и преобразование измерений в угловой спектр путем умножения на комплексно-сопряженные диаграммы направленности антенн, суммирования результатов умножения по совокупности антенн и определения квадрата модуля суммы. Одновременно сигналы принимают с помощью дополнительных антенн, располагаемых на нормали к плоскости решетки из ее центра, угловой спектр нормируют на сумму квадратов модулей диаграмм направленности антенн (ДНА) и определяют угол места объекта, как положение его максимума. При этом ДНА определяют в направлении полученного азимута и с учетом коэффициента отражения радиоволн от земной поверхности. 6 ил.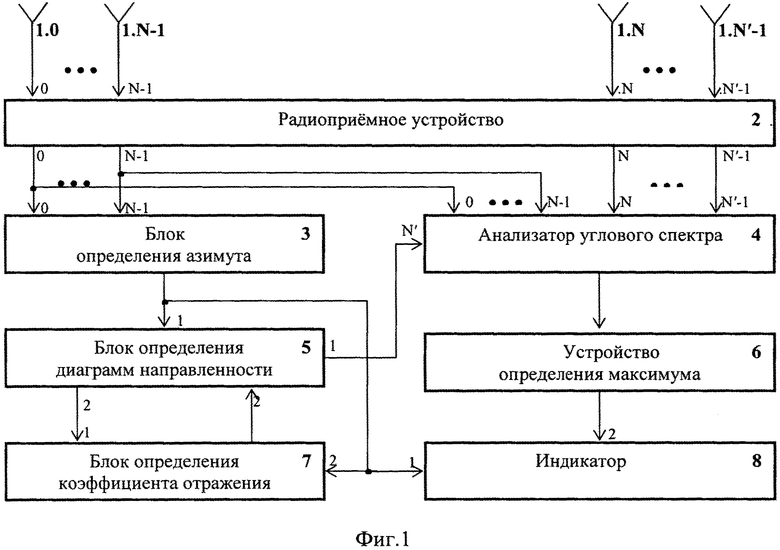
Способ пеленгования воздушного объекта, включающий прием сигналов бортового передатчика с помощью антенн, образующих кольцевую решетку, располагаемую вблизи и параллельно земной поверхности, определение по принятым антеннами решетки сигналам азимута объекта, измерение комплексных амплитуд принятых сигналов и преобразование измерений в угловой спектр путем умножения на комплексно-сопряженные диаграммы направленности антенн, суммирования результатов умножения по совокупности антенн и определения квадрата модуля суммы, отличающийся тем, что сигналы принимают одновременно с помощью дополнительных антенн, располагаемых на нормали к плоскости решетки из ее центра, угловой спектр нормируют на сумму квадратов модулей диаграмм направленности антенн и определяют угол места объекта, как положение максимума нормированного углового спектра, при этом диаграммы направленности антенн определяют в направлении полученного азимута и с учетом отражения радиоволн от земной поверхности по формуле:

где 



| САИДОВ А.С | |||
| и др | |||
| Проектирование фазовых автоматических пеленгаторов | |||
| Москва, "Радио и связь", 1997, с.47-48RU 2444755 C1, 10.03.2012RU 2410712 C1, 27.01.2011RU 2420755 C2, 10.06.2011US 6184830 B1, 06.02.2001JP 2012215559 A, 08.11.2012WO 2000019230 A, 06.04.2000WO 2000033419 A1, 08.06.2000 |

