Изобретение относится к радиотехнике и может быть использовано в системах обнаружения и пеленгования источников радиоизлучения (ИРИ) в условиях априорной неопределенности относительно поляризационных и пространственных параметров радиосигналов, шумов и помех, когда налагаются ограничения на габаритные размеры пеленгаторной антенной системы.
Известен способ пеленгования многолучевых сигналов по патенту RUS №2309422 [1], согласно которому выполняют следующую последовательность действий:
принимают радиосигнал неизвестной поляризации многоэлементной антенной решеткой;
формируют ансамбль радиосигналов xn(t), зависящих от времени t и номера n антенны,  где N - число антенн;
где N - число антенн;
синхронно преобразуют ансамбль принятых радиосигналов xn(t) в цифровые сигналы xn(z), где z - номер временного отсчета сигнала;
преобразуют цифровые сигналы xn(z) в сигнал комплексного амплитудно-фазового распределения  описывающий распределение амплитуд и фаз принятого радиосигнала на элементах решетки и запоминают его;
описывающий распределение амплитуд и фаз принятого радиосигнала на элементах решетки и запоминают его;
формируют идеальный сигнал комплексной фазирующей функции  описывающий возможные направления прихода сигнала от каждого m-го потенциального источника;
описывающий возможные направления прихода сигнала от каждого m-го потенциального источника;
используя сигнал фазирующей функции  преобразуют сигнал измеренного
преобразуют сигнал измеренного  в сигнал комплексного углового спектра
в сигнал комплексного углового спектра  где
где  - матрица, эрмитово сопряженная с
- матрица, эрмитово сопряженная с 
по максимуму модуля сигнала комплексного углового спектра  определяют азимут θ и угол места β на ИРИ.
определяют азимут θ и угол места β на ИРИ.
При таком способе устраняется неопределенность, связанная с отсутствием данных об угле места прихода электромагнитной волны, за счет чего уменьшается количество ошибок измерения азимута θ и угла места β на ИРИ.
Недостатком аналога является относительно низкая точность измерения азимута θ и угла места β на ИРИ, объясняемая тем, что не обеспечивается согласование по поляризации между приемной антенной системой (АС) и приходящей электромагнитной волной.
Известен способ поляризационно-чувствительного пеленгования радиосигналов по патенту RUS №2393498 [2], согласно которому:
принимают радиосигнал неизвестной поляризации многоэлементной антенной решеткой;
формируют ансамбль радиосигналов, зависящих от времени и номера антенного элемента;
синхронно преобразуют ансамбль принятых радиосигналов в цифровые сигналы;
из цифровых сигналов получают сигнал комплексного  описывающий распределение амплитуд и фаз принятого радиосигнала на элементах решетки;
описывающий распределение амплитуд и фаз принятого радиосигнала на элементах решетки;
формируют и запоминают поляризационно-зависимые идеальные сигналы  комплексной фазирующей функции для заданной частоты приема и требуемых узлов сетки наведения по азимуту θm и углу места βm;
комплексной фазирующей функции для заданной частоты приема и требуемых узлов сетки наведения по азимуту θm и углу места βm;
используя сигналы комплексной фазирующей функции  преобразуют сигнал
преобразуют сигнал  в обобщенный сигнал
в обобщенный сигнал  значение максимума которого используют для определения азимутально-угломестного пеленга θ и β, на источник принятого радиосигнала и его достоверности, а соответствующее найденному пеленгу θ и β, значение
значение максимума которого используют для определения азимутально-угломестного пеленга θ и β, на источник принятого радиосигнала и его достоверности, а соответствующее найденному пеленгу θ и β, значение  сигнала фазирующей функции применяют для преобразования сигнала
сигнала фазирующей функции применяют для преобразования сигнала  в сигнал
в сигнал  описывающий поляризацию принятого радиосигнала.
описывающий поляризацию принятого радиосигнала.
Предварительно до начала приема радиосигнала формируют и запоминают для всех возможных частот приема и требуемых узлов сетки наведения по азимутам θm и углам места βm поляризационно-зависимые идеальные сигналы  комплексной фазирующей функции и комплексные взвешивающие сигналы
комплексной фазирующей функции и комплексные взвешивающие сигналы  а при приеме на заданной частоте соответствующие взвешивающие сигналы используют для преобразования сигнала
а при приеме на заданной частоте соответствующие взвешивающие сигналы используют для преобразования сигнала  в обобщенный сигнал
в обобщенный сигнал  значение максимума которого используют для определения азимутально-угломестного пеленга на источник принятого радиосигнала и его достоверности, а соответствующее найденному пеленгу значение сигнала фазирующей функции применяют для преобразования сигнала АФР в сигнал, описывающий состояние поляризации принятого радиосигнала.
значение максимума которого используют для определения азимутально-угломестного пеленга на источник принятого радиосигнала и его достоверности, а соответствующее найденному пеленгу значение сигнала фазирующей функции применяют для преобразования сигнала АФР в сигнал, описывающий состояние поляризации принятого радиосигнала.
В указанном способе компенсируется ошибка измерения азимута θ и угла места β на ИРИ, связанная с отсутствием согласования по поляризации между приемной АС и полем приходящей электромагнитной волны, за счет использования многоэлементной антенной системы, состоящей из антенных элементов, имеющих существенное различие поляризационных откликов, а также за счет сканирования по пространственным и поляризационным параметрам.
Недостатками аналога являются относительно низкая точность измерения азимута θ и угла места β на ИРИ в условиях априорной неопределенности относительно поляризационных и пространственных параметров радиосигналов, шумов и помех, когда налагаются ограничения на габаритные размеры пеленгаторной антенной системы, а также значительные временные затраты при измерении азимута и угла места на ИРИ, вызванные операциями сканирования по пространственным и поляризационным параметрам.
Из известных способов наиболее близким аналогом (прототипом) предлагаемого способа по своей технической сущности является способ поляризационно-чувствительного пеленгования радиосигналов по патенту RUS №2624449 [3] заключающийся в том, что:
выбирают 3-мерную декартову систему координат (ДСК) OXYZ для производства измерений и расчетов;
принимают аналоговый радиосигнал неизвестной поляризации триортогональной антенной системой (ТОАС), состоящей из трех антенных элементов (АЭ) АЭx, АЭy, АЭz с центром, совпадающим с началом О выбранной ДСК, от источника радиоизлучения (ИРИ) с неизвестными координатами в моменты времени t1 и t2;
формируют совокупность аналоговых радиосигналов Ex1, Ey1, Ez1 и Ex2, Ey2, Ez2, зависящих от момента времени и антенного элемента ТОАС на которые они приняты;
путем векторного сложения ортогональных компонент Ex1, Ey1, Ez1 и Ex2, Ey2, Ez2 определяют ориентацию векторов напряженностей электрического поля  в пространстве в моменты времени t1 и t2 и запоминают их;
в пространстве в моменты времени t1 и t2 и запоминают их;
формируют две вспомогательные плоскости, каждая из которых проходит через начало О выбранной ДСК и перпендикулярна вектору напряженности электрического поля  соответственно;
соответственно;
строят линию положения ИРИ OI на пересечении вспомогательных плоскостей;
измеряют азимут θ и угол места β на ИРИ, как углы наклона линии положения ИРИ OI в выбранной ДСК OXYZ в горизонтальной плоскости и в вертикальной плоскости соответственно.
Недостатками способа прототипа являются относительно низкая точность определения азимута θ и угла места β на ИРИ, обусловленная слабыми механической жесткостью и устойчивостью к вибрационным нагрузкам ТОАС, состоящей из АЭ в виде несимметричных вибраторов штыревого типа.
Целью изобретения является разработка способа, обеспечивающего более высокую точность пеленгования в условиях возможных вибрационных нагрузок на АС, а также в условиях априорной неопределенности относительно поляризационных и пространственных параметров радиосигналов, шумов и помех, когда налагаются ограничения на габаритные размеры пеленгаторной АС.
Поставленная цель достигается тем, что в известном способе поляризационного пеленгования с использованием ТОАС, заключающемся в том, что выбирают 3-мерную ДСК OXYZ для производства измерений и расчетов, принимают аналоговый радиосигнал неизвестной поляризации ТОАС с центром, совпадающим с началом О выбранной ДСК, от ИРИ с неизвестными координатами в моменты времени t1 и t2, формируют совокупность аналоговых радиосигналов, зависящих от момента времени и номера антенного элемента ТОАС на которые они приняты, преобразуют совокупность принятых аналоговых радиосигналов в дискретные сигналы, с помощью которых формируют две вспомогательные плоскости Ω1 и Ω2, строят линию положения ИРИ на пересечении вспомогательных плоскостей, после чего измеряют азимут θ и угол места β на ИРИ в качестве ТОАС используют ТОРАС.
Для формирования вспомогательных плоскостей Ω1 и Ω2, предварительно в моменты времени t1 и t2 измеряют с помощью ТОРАС ортогональные компоненты Hx1, Hy1, Hz1 и Hx2, Hy2, Hz2 векторов напряженности магнитного поля  и
и  принятого аналогового радиосигнала.
принятого аналогового радиосигнала.
Определяют ориентацию векторов напряженности магнитного поля  и
и  в ДСК OXYZ путем векторного сложения соответствующих ортогональных компонент Hx1, Hy1, Hz1 и Hx2, Hy2, Hz2.
в ДСК OXYZ путем векторного сложения соответствующих ортогональных компонент Hx1, Hy1, Hz1 и Hx2, Hy2, Hz2.
Строят две вспомогательные плоскости Ω1 и Ω2, так, что бы они были перпендикулярны векторам  и
и  соответственно и проходили через начало координат О.
соответственно и проходили через начало координат О.
Строят линию положения ИРИ на пересечении вспомогательных плоскостей Ω1 и Ω2, после чего измеряют углы наклона линии положения ИРИ в выбранной ДСК OXYZ в горизонтальной θ и вертикальной β плоскостях. В качестве азимута и угла места на ИРИ принимают углы θ и β соответственно.
Благодаря указанной новой совокупности существенных признаков за счет использования ТОРАС, обладающей большей механической прочностью и устойчивостью к вибрационным нагрузкам, достигается цель изобретения: повышение точности пеленгования в условиях априорной неопределенности относительно поляризационных и пространственных параметров радиосигналов, шумов и помех, когда налагаются ограничения на габаритные размеры пеленгаторной АС.
Определение ориентации вектора напряженности магнитного поля в пространстве позволяет исключить операции сканирования по пространственным и поляризационным параметрам, что сокращает временные затраты при измерении азимута и угла места на ИРИ.
Заявленное изобретение поясняется чертежами, на которых показаны:
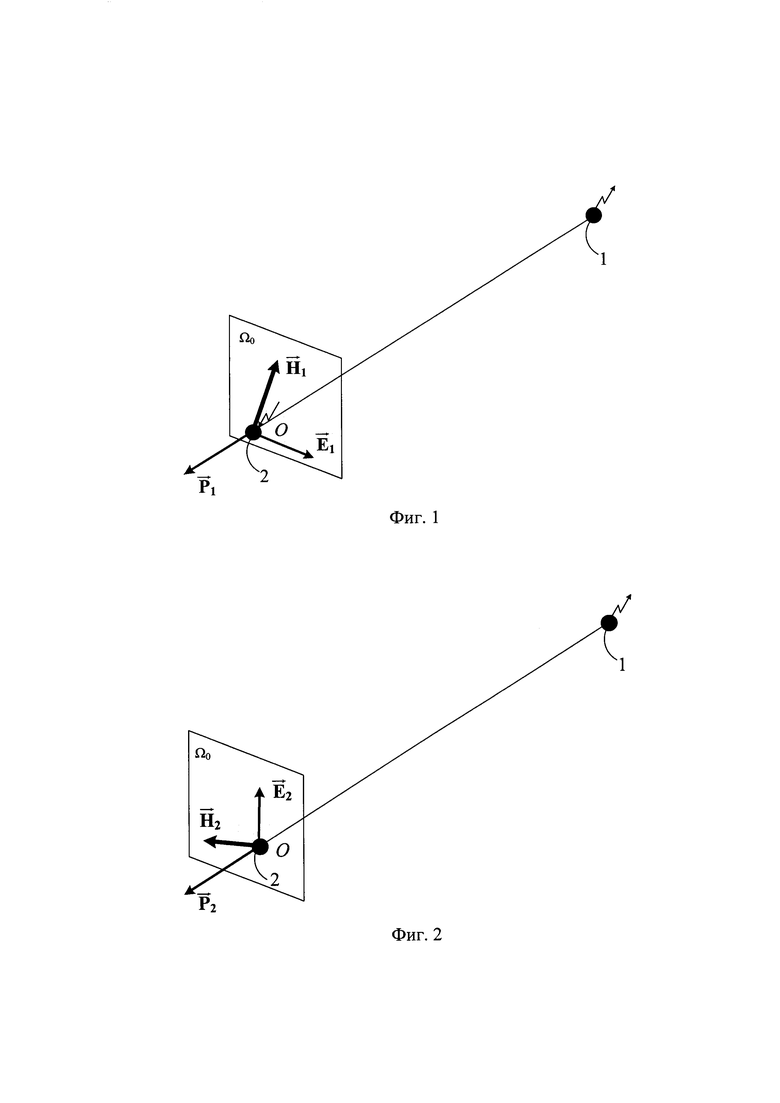
на фиг. 1 положение вектора Пойтинга  а также векторов
а также векторов  и
и  в момент времени t1;
в момент времени t1;
на фиг. 2 положение вектора Пойтинга  а также векторов
а также векторов  и
и  в момент времени t2;
в момент времени t2;
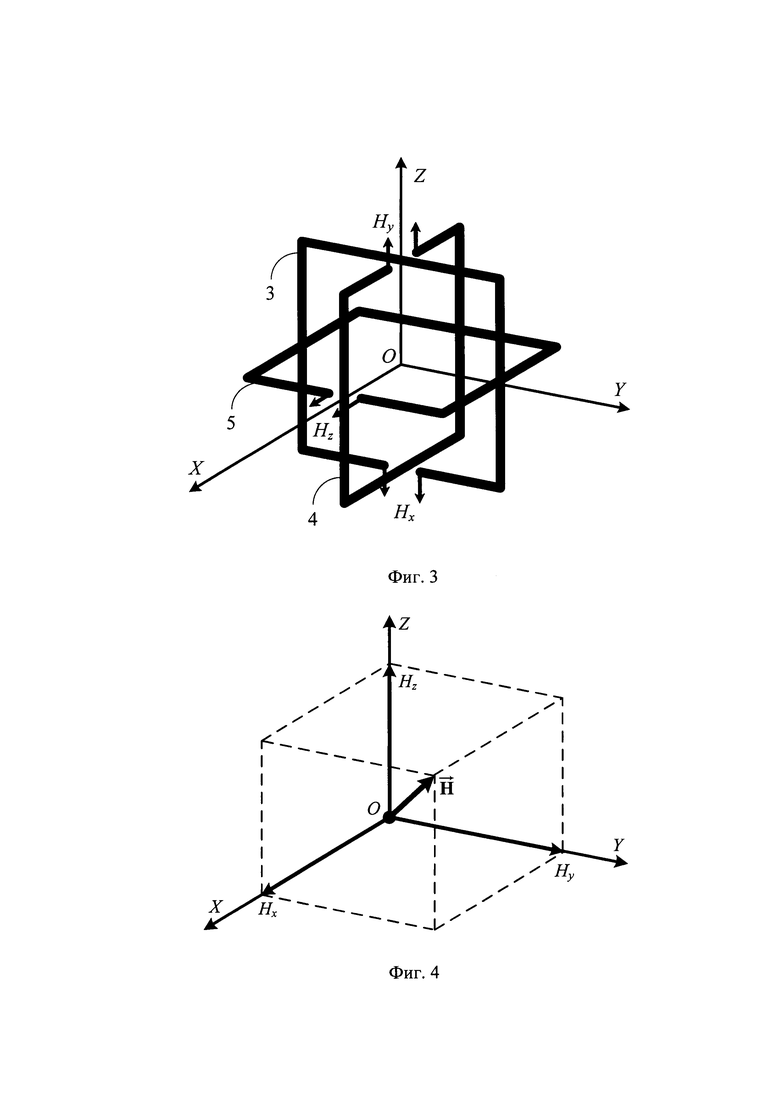
на фиг. 3 конфигурация ТОРАС в ДСК;
на фиг. 4 ортогональные компоненты Hx, Hy, Hz вектора напряженности магнитного поля  в ДСК OXYZ;
в ДСК OXYZ;
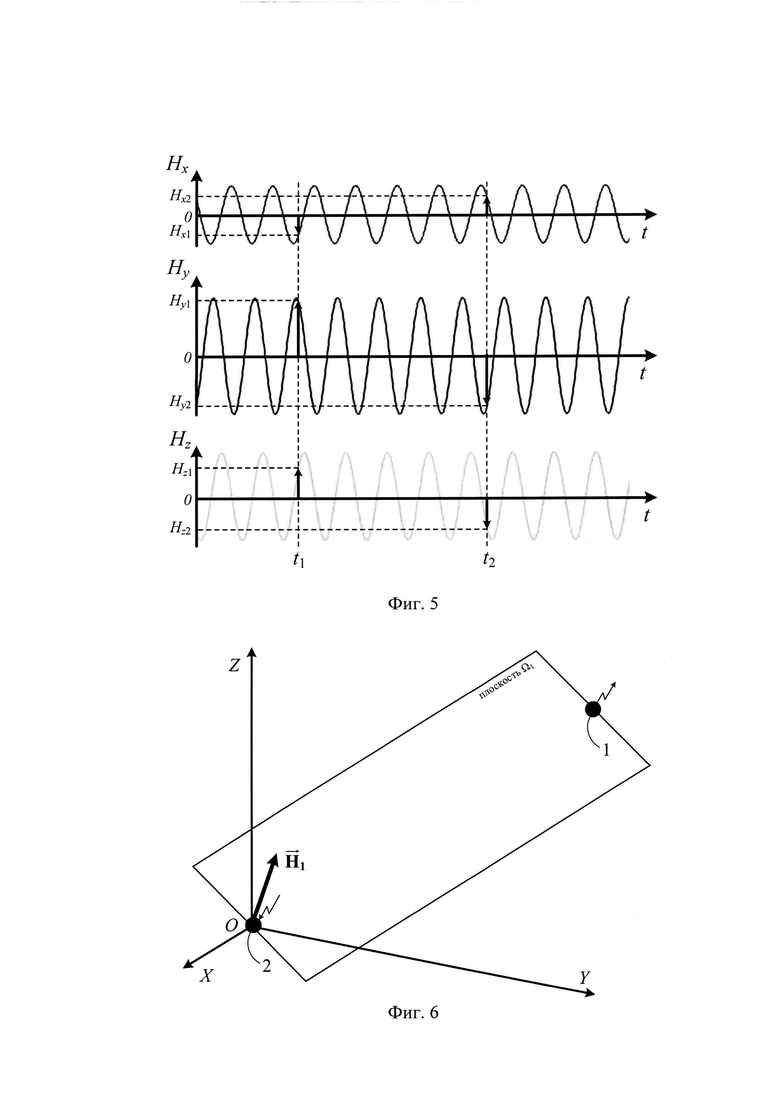
на фиг. 5 временные диаграммы ортогональных компонент Hx, Hy, Hz, принятых на антенные элементы ТОРАС, а также их значения Hx1, Hy1, Hz1 и Hx2, Hy2, Hz2, измеренные в моменты времени t1 и t2;
на фиг. 6 графическое представление плоскости Ω1 в ДСК OXYZ;
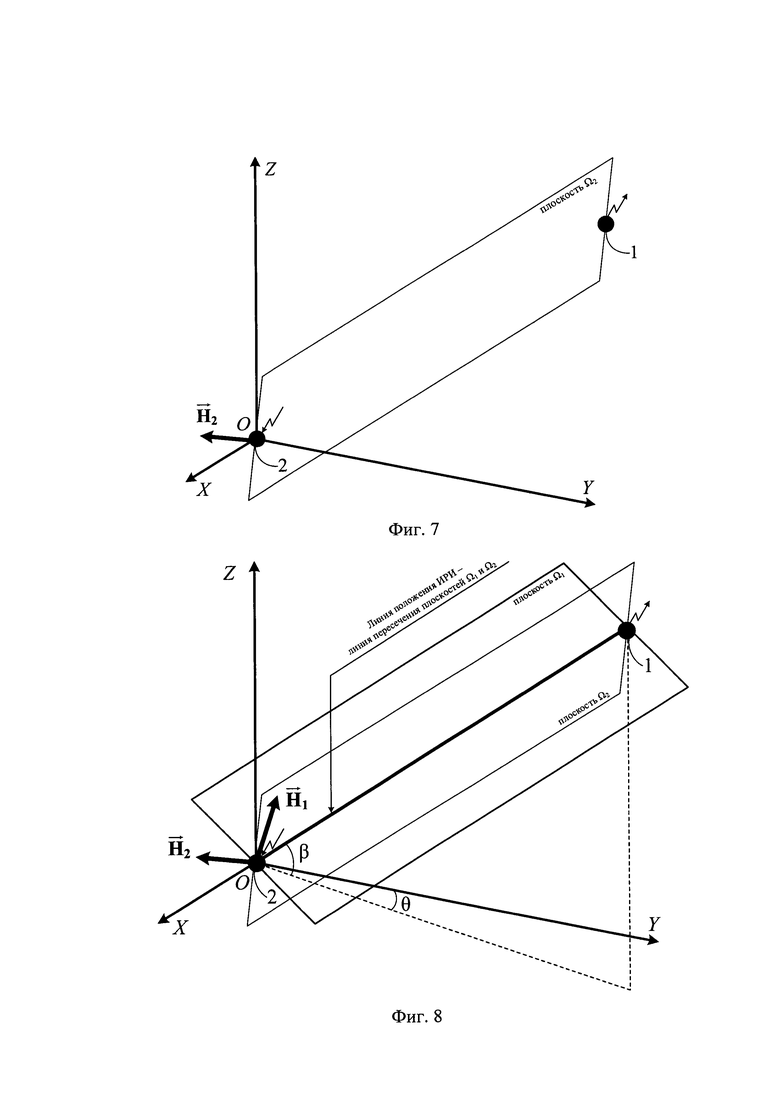
на фиг. 7 графическое представление плоскости Ω2 в ДСК OXYZ;
на фиг. 8 графическое представление линии пересечения OI плоскостей Ω1 и Ω2 в ДСК OXYZ.
Традиционно физической основой любого способа пеленгования радиосигналов принято считать различие времени прихода радиоволны в разнесенные точки пространства. При этом точность пеленгования радиосигналов неизвестной поляризации классическими способами, ориентированными на обработку электромагнитного поля определенной поляризации, дает значительные погрешности пеленгования, если поляризационные характеристики пеленгаторной АС не согласованы с поляризацией падающих волн. Повышение точности пеленгования в большинстве случаев достигается увеличением базы пеленгаторной антенной системы, то есть разнесением в пространстве антенных элементов пеленгаторной антенной системы [4].
Однако существует возможность определения направления на ИРИ с помощью сосредоточенной АС, способной определить поляризацию радиосигнала в точке приема.
Поляризация электромагнитной волны является ее пространственно-временной характеристикой и определяется видом траектории, описываемой концом вектора напряженности магнитного  (или электрического
(или электрического  поля в фиксированной точке пространства [5, 6].
поля в фиксированной точке пространства [5, 6].
На фиг. 1 и фиг. 2 отображены ИРИ 1 и измеритель 2 параметров электромагнитной волны.
Распространение электромагнитной волны сопровождается переносом энергии. Для характеристики этого явления вводят вектор Пойтинга  Он определяет направление и величину плотности потока мощности электромагнитного поля от ИРИ в каждой точке пространства.
Он определяет направление и величину плотности потока мощности электромагнитного поля от ИРИ в каждой точке пространства.
Вектор Пойтинга  совпадает с направлением распространения электромагнитной волны и является результатом векторного произведения векторов напряженности электрического
совпадает с направлением распространения электромагнитной волны и является результатом векторного произведения векторов напряженности электрического  и магнитного
и магнитного  полей, то есть образует вместе с ними правую тройку векторов.
полей, то есть образует вместе с ними правую тройку векторов.
На фиг. 1 и фиг. 2 отображены положения векторов Пойтинга 
 а также векторов напряженности электрического
а также векторов напряженности электрического 
 и магнитного
и магнитного 
 полей в моменты времени t1 и t2 соответственно.
полей в моменты времени t1 и t2 соответственно.
Кроме того, на фиг. 1 и фиг. 2 показана часть фазового фронта волны Ω0, определяемого как поверхность одинаковых фаз векторов поля  или
или  перпендикулярная направлению распространения электромагнитной волны.
перпендикулярная направлению распространения электромагнитной волны.
Сопоставив векторы напряженностей магнитного поля  и
и  возможно определить направление вектора Пойтинга
возможно определить направление вектора Пойтинга  а следовательно и направление на ИРИ.
а следовательно и направление на ИРИ.
Для измерения ортогональных компонент векторов напряженностей магнитного поля  и
и  в заявленном способе использована ТОРАС, состоящая из трех ортогональных рамочных антенн 3, 4 и 5 (см. фиг. 3), далее - антенных элементов (АЭ).
в заявленном способе использована ТОРАС, состоящая из трех ортогональных рамочных антенн 3, 4 и 5 (см. фиг. 3), далее - антенных элементов (АЭ).
В способе используют декартову систему координат OXYZ, в которой центр координат О совмещен с центром ТОРАС, оси OX, OY и OZ направленны перпендикулярно АЭ 3, 4 и 5 соответственно (см. фиг. 3).
Векторная сумма напряженностей магнитного поля Hx, Hy и Hz, измеренных на АЭ 3, 4 и 5 ТОРАС соответственно в произвольный момент времени будет составлять вектор напряженности магнитного поля  (см. фиг. 4).
(см. фиг. 4).
На фиг. 5 представлены временные диаграммы ортогональных компонент Hx, Hy, Hz, принятого в общем случае эллиптически поляризованного аналогового радиосигнала на АЭ 3, 4 и 5 ТОРАС соответственно. В моменты времени t1 и t2 измеряют и запоминают значения компонент Hx1, Hy1, Hz1 и Hx2, Hy2, Hz2 с помощью АЭ 3, 4 и 5 ТОРАС соответственно.
Путем векторного сложения ортогональных компонент Hx1, Hy1, Hz1 и Hx2, Hy2, Hz2, определяют ориентацию векторов  и
и  в пространстве и запоминают их.
в пространстве и запоминают их.
Плоскость Ω1 ортогональна вектору напряженности магнитного поля  проходит через центр ТОРАС совмещенный с началом ДСК OXYZ (фиг. 6) и описывается уравнением:
проходит через центр ТОРАС совмещенный с началом ДСК OXYZ (фиг. 6) и описывается уравнением:
Hx1x+Hy1y+Hz1z=0.
Плоскость Ω2 ортогональна вектору напряженности магнитного поля  проходит через центр ТОРАС совмещенный с началом ДСК OXYZ (фиг. 7) и описывается уравнением:
проходит через центр ТОРАС совмещенный с началом ДСК OXYZ (фиг. 7) и описывается уравнением:
Hx2x+Hy2y+Hz2z=0,
Для измерения значений азимута θ и угла места β, определяют линию положения ИРИ - линию пересечения плоскостей Ω1 и Ω2, которая задается системой уравнений:
Измеряют углы наклона линии положения ИРИ в выбранной ДСК OXYZ в горизонтальной θ и вертикальной β плоскостях (см. фиг. 8), а в качестве азимута и угла места на ИРИ принимают углы θ и β соответственно.
Реализация заявленного способа преимущественно целесообразна при размещении ТОРАС на подвижном объекте, в частности на летательном аппарате (ЛА). При этом необходимо с высокой точностью определять координаты ЛА и углы ориентации ЛА [7].
Имитационное моделирование заявленного способа поляризационного пеленгования радиосигналов с помощью разработанного программного обеспечения [8] показало повышение точности определения азимута и угла места по сравнению со способом прототипом на 10…15% (в зависимости от вибрационной нагрузки на антенные системы), в условиях априорной неопределенности относительно поляризационных и пространственных параметров радиосигналов, шумов и помех, когда налагаются ограничения на габаритные размеры пеленгаторной антенной системы, что указывает на возможность достижения указанного технического результата.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Шевченко В.Н., Иванов Н.М., Звездина Ю.А. Способ пеленгования многолучевых сигналов. Патент на изобретение RUS №2309422 от 27.10.2007.
2. Шевченко В.Н., Иванов Н.М., Шевченко Е.А. Способ поляризационно-чувствительного пеленгования радиосигналов (Варианты). Патент на изобретение RUS №2393498 от 27.06.2010.
3. Богдановский С.В., Волков Р.В., Севидов В.В., Симонов А.Н. Способ поляризационного пеленгования радиосигналов. Патент на изобретение RUS №2624449 от 19.10.2016.
4. Дворников С.В., Саяпин В.Н., Симонов А.Н. Теоретические основы координатометрии источников радиоизлучений. Учебное пособие. -СПб.: ВАС, 2007.- 80 с.
5. Комарович В.Ф., Никитченко В.В. Методы пространственной обработки радиосигналов. - Л.: ВАС, 1989. - 278 с.
6. Богдановский С.В., Волков Р.В., Севидов В.В., Симонов А.Н. Способ поляризационного пеленгования радиосигналов диапазона ОВЧ и УВЧ с борта беспилотного летательного аппарата. Инновационная деятельность в Вооруженных Силах Российской Федерации: Труды всеармейской научно-практической конференции. 11-12 октября 2017 года, - СПб.: ВАС, 2017. С. 54-56.
7. Богдановский С.В., Симонов А.Н., Севидов В.В. Поляризационный способ определения ориентации БЛА Успехи современной радиоэлектроники. 2017. №10. С 15-19.
8. Богдановский С.В., Симонов А.Н., Теслевич С.Ф., Медведев М.В. Программа исследования ошибок определения координат источника радиоизлучения в угломерной системе. Программы для ЭВМ. Базы данных. Топологии интегральных микросхем. 2015. №11. С. 9.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЙ С БОРТА ЛЕТАТЕЛЬНОГО АППАРАТА С ИСПОЛЬЗОВАНИЕМ ТРИОРТОГОНАЛЬНОЙ АНТЕННОЙ СИСТЕМЫ | 2019 |
|
RU2714502C1 |
| СПОСОБ ПОЛЯРИЗАЦИОННОГО ПЕЛЕНГОВАНИЯ РАДИОСИГНАЛОВ С ИСПОЛЬЗОВАНИЕМ ТРИОРТОГОНАЛЬНОЙ АНТЕННОЙ СИСТЕМЫ | 2019 |
|
RU2713866C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ С БОРТА ЛЕТАТЕЛЬНОГО АППАРАТА С ИСПОЛЬЗОВАНИЕМ ТРИОРТОГОНАЛЬНОЙ РАМОЧНОЙ АНТЕННОЙ СИСТЕМЫ | 2020 |
|
RU2741074C1 |
| Способ определения координат источника радиоизлучений с борта летательного аппарата с использованием триортогональной рамочной антенной системы | 2024 |
|
RU2824445C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЙ С БОРТА ЛЕТАТЕЛЬНОГО АППАРАТА С ИСПОЛЬЗОВАНИЕМ ТРИОРТОГОНАЛЬНОЙ АНТЕННОЙ СИСТЕМЫ | 2019 |
|
RU2709607C1 |
| СПОСОБ ПОЛЯРИЗАЦИОННОГО ПЕЛЕНГОВАНИЯ РАДИОСИГНАЛОВ | 2016 |
|
RU2624449C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ С БОРТА ЛЕТАТЕЛЬНОГО АППАРАТА С ИСПОЛЬЗОВАНИЕМ КОМБИНИРОВАННОЙ ТРИОРТОГОНАЛЬНОЙ АНТЕННОЙ СИСТЕМЫ | 2020 |
|
RU2741068C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СОБСТВЕННОГО МЕСТОПОЛОЖЕНИЯ ОБЪЕКТА В ПРОСТРАНСТВЕ | 2023 |
|
RU2827103C1 |
| Способ определения собственного местоположения объекта в пространстве | 2023 |
|
RU2815168C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПРОСТРАНСТВЕННОЙ СЕЛЕКЦИИ ЭЛЕКТРОМАГНИТНЫХ ВОЛН С ПОСЛЕДУЮЩЕЙ ПОЛЯРИЗАЦИОННОЙ ОБРАБОТКОЙ СИГНАЛОВ | 2018 |
|
RU2720588C1 |
Изобретение относится к радиотехнике и может быть использовано в системах обнаружения и пеленгования источников радиоизлучения (ИРИ) в условиях априорной неопределенности относительно поляризационных и пространственных параметров радиосигналов, шумов и помех, когда налагаются ограничения на габаритные размеры пеленгаторной антенной системы. Технический результат изобретения – повышение точности пеленгования на основе использования триортогональной рамочной антенной системы (ТОРАС), обладающей большей механической прочностью и устойчивость к вибрационным нагрузкам по сравнению с триортогональной антенной системой, состоящей из антенных элементов в виде несимметричных вибраторов штыревого типа. Способ основан на измерении с помощью ТОРАС ортогональных компонент Hx1, Hy1, Hz1 и Hx2, Нy2, Hz2 векторов напряженности магнитного поля  и
и в моменты времени t1 и t2, определении ориентации векторов и в пространстве, построении вспомогательных плоскостей Ω1 и Ω2, определении азимута θ и угла места β на ИРИ, как углов наклона линии пересечения вспомогательных плоскостей Ω1 и Ω2. 8 ил.
в моменты времени t1 и t2, определении ориентации векторов и в пространстве, построении вспомогательных плоскостей Ω1 и Ω2, определении азимута θ и угла места β на ИРИ, как углов наклона линии пересечения вспомогательных плоскостей Ω1 и Ω2. 8 ил.
Способ поляризационного пеленгования радиосигналов с использованием триортогональной антенной системы (ТОАС), заключающийся в том, что выбирают 3-мерную декартову систему координат (ДСК) OXYZ для производства измерений и расчетов, принимают аналоговый радиосигнал неизвестной поляризации триортогональной антенной системой (ТОАС) с центром, совпадающим с началом О выбранной ДСК, от источника радиоизлучения (ИРИ) с неизвестными координатами в моменты времени t1 и t2, формируют совокупность аналоговых радиосигналов, зависящих от момента времени и номера антенного элемента ТОАС, на которые они приняты, преобразуют совокупность принятых аналоговых радиосигналов в дискретные сигналы, с помощью которых формируют две вспомогательные плоскости Ω1 и Ω2, строят линию положения ИРИ на пересечении вспомогательных плоскостей, после чего измеряют азимут θ и угол места β на ИРИ, отличающийся тем, что в качестве ТОАС используют триортогональную рамочную антенную систему (ТОРАС), а для формирования вспомогательных плоскостей Ω1 и Ω2 предварительно в моменты времени t1 и t2 измеряют с помощью ТОРАС ортогональные компоненты Нх1, Hy1, Hz1 и Hx2, Hy2, Hz2 векторов напряженности магнитного поля  и
и  принятого аналогового радиосигнала, определяют ориентацию векторов напряженности магнитного поля и в ДСК OXYZ путем векторного сложения соответствующих ортогональных компонент Hx1, Hy1, Hz1 и Hx2, Hy2, Hz2, строят две вспомогательные плоскости Ω1 и Ω2 так, чтобы они были перпендикулярны векторам и соответственно и проходили через начало координат О, строят линию положения ИРИ на пересечении вспомогательных плоскостей Ω1 и Ω2, после чего измеряют углы наклона линии положения ИРИ в выбранной ДСК OXYZ в горизонтальной θ и вертикальной β плоскостях, а в качестве азимута и угла места на ИРИ принимают углы θ и β соответственно.
принятого аналогового радиосигнала, определяют ориентацию векторов напряженности магнитного поля и в ДСК OXYZ путем векторного сложения соответствующих ортогональных компонент Hx1, Hy1, Hz1 и Hx2, Hy2, Hz2, строят две вспомогательные плоскости Ω1 и Ω2 так, чтобы они были перпендикулярны векторам и соответственно и проходили через начало координат О, строят линию положения ИРИ на пересечении вспомогательных плоскостей Ω1 и Ω2, после чего измеряют углы наклона линии положения ИРИ в выбранной ДСК OXYZ в горизонтальной θ и вертикальной β плоскостях, а в качестве азимута и угла места на ИРИ принимают углы θ и β соответственно.
| СПОСОБ ПОЛЯРИЗАЦИОННОГО ПЕЛЕНГОВАНИЯ РАДИОСИГНАЛОВ | 2016 |
|
RU2624449C1 |
| СПОСОБ ПОЛЯРИЗАЦИОННО-ЧУВСТВИТЕЛЬНОГО ПЕЛЕНГОВАНИЯ РАДИОСИГНАЛОВ (ВАРИАНТЫ) | 2008 |
|
RU2393498C2 |
| СПОСОБ ПОЛЯРИЗАЦИОННО-НЕЗАВИСИМОГО ПЕЛЕНГОВАНИЯ МНОГОЛУЧЕВЫХ РАДИОСИГНАЛОВ | 2010 |
|
RU2431862C1 |
| СПОСОБ ПРОСТРАНСТВЕННОЙ ПОЛЯРИЗАЦИОННО-ЧУВСТВИТЕЛЬНОЙ ЛОКАЛИЗАЦИИ МНОГОЛУЧЕВЫХ РАДИОСИГНАЛОВ | 2008 |
|
RU2385467C1 |
| СПОСОБ ПОЛЯРИЗАЦИОННО-НЕЗАВИСИМОГО ОБНАРУЖЕНИЯ И ЛОКАЛИЗАЦИИ ШИРОКОПОЛОСНЫХ РАДИОСИГНАЛОВ | 2009 |
|
RU2410707C2 |
| JP 6130138 A, 13.05.1994 | |||
| US 6184830 B1, 06.02.2001 | |||
| DE 4026390 C, 09.01.1992. | |||

