Изобретение относится к радиотехнике, в частности к радиопеленгации, и может быть использовано для определения местоположения воздушных объектов по радиоизлучениям их передатчиков.
Известен способ двухмерного пеленгования, включающий прием сигналов бортового передатчика воздушного объекта с помощью антенн, образующих кольцевую решетку, измерение фаз принятых сигналов, их реконструкцию с устранением цикличности фазовых измерений и расчет азимута и угла места по реконструированным фазам (Саидов А.С., Тагилаев А.Р., Алиев Н.М., Асланов Г.К. Проектирование фазовых автоматических пеленгаторов. М.: Радио и связь, 1997, глава I, II, стр.10, стр.51-52).
Ограничением способа является низкая точность измерения угла места, когда пеленгуется энергетический центр лучей со значительными флуктуациями. Кроме того, набеги фаз в антеннах пропорциональны косинусу угла места и при его значениях, близких к нулю, для пологих радиоволн, различаются незначительно. Другой недостаток состоит в сложности выполнения операции реконструкции фаз.
Известен способ пеленгования, включающий прием сигнала с помощью ненаправленных антенн, образующих кольцевую решетку, измерение разности фаз между сигналами в двух группах, векторы, соединяющие пары антенн в которых коллинеарны, а по совокупности разностей фаз в группах методом многошкальных измерений оценивают однозначные на расстоянии диаметра решетки набеги фаз, по которым рассчитывают азимут и угол места (RU, №2251707).
В данном способе исключается операция реконструкции фаз, но основной недостаток предыдущего аналога (низкая точность измерения угла места) не устраняется.
Известен способ определения двухмерного пеленга, включающий прием радиосигналов с помощью центральной антенны и антенн, образующих N элементную кольцевую решетку при общем числе антенн не менее трех, синхронное измерение комплексных амплитуд принятых радиосигналов, преобразование их в узлах сетки наведения решетки в угловой спектр и определение координат максимума его модуля (RU, №2288481).
Введение центральной антенны позволяет увеличить максимально допустимый радиус решетки и тем самым увеличить точность пеленгования в горизонтальной плоскости, т.е. азимута. Однако основной недостаток - низкая точность измерения угла места - сохраняется по указанным ранее причинам.
Из известных способов наиболее близким к предлагаемому по технической сущности является способ двухмерного пеленгования воздушного объекта, заключающийся в том, что принимают сигналы передатчика объекта с помощью антенн, образующих кольцевую решетку, расположенную параллельно земной поверхности, измеряют по принятым сигналам азимут объекта, преобразуют принятые сигналы в угловой спектр по углам места (Саидов А.С., Тагилаев А.Р., Алиев Н.М., Асланов Г.К. Проектирование фазовых автоматических пеленгаторов. М.: Радио и связь, 1997, глава II, с.47-48).
В этом способе принятые сигналы преобразуют в двухмерный угловой спектр по возможным азимутам и углам места объекта, а двухмерный пеленг определяют как положение максимума квадрата модуля этого спектра. Причем преобразование в двухмерный угловой спектр выполняют путем умножения принятых сигналов на комплексно сопряженные двухмерные диаграммы направленности в направлении возможного положения объекта и усреднения результатов умножения по совокупности антенн решетки.
В данном способе достигается потенциальная точность и предельная чувствительность измерения азимута, но сохраняется основной недостаток аналогов - недостаточная точность измерения угла места объекта. Дополнительную сложность вызывает выполнение операций двухмерного преобразования сигналов в угловой спектр для совокупности антенн кольцевой решетки, что усложняет обработку и увеличивает время пеленгования.
Решаемая изобретением задача - улучшение технико-эксплуатационных характеристик.
Достигаемый технический результат изобретения заключается в повышении точности измерения угла места объекта и уменьшении времени пеленгования за счет сокращения числа операций обработки принятых сигналов.
Для решения поставленной задачи с достижением указанного технического результата в известном способе двухмерного пеленгования воздушного объекта, заключающемся в том, что принимают сигналы передатчика объекта с помощью антенн, образующих кольцевую решетку, расположенную параллельно земной поверхности, измеряют по принятым сигналам азимут объекта, преобразуют принятые сигналы в угловой спектр по углам места, согласно изобретению принимают сигналы по меньшей мере двумя дополнительными антеннами, расположенными на центральной оси кольцевой решетки ортогонально ее плоскости, преобразуют принятые сигналы в угловой спектр по углам места прямого и отраженного от земной поверхности сигнала в направлении измеренного азимута объекта, угловой спектр преобразовывают в угловой спектр второго порядка, а угол места объекта определяют путем однопараметрической максимизации углового спектра второго порядка.
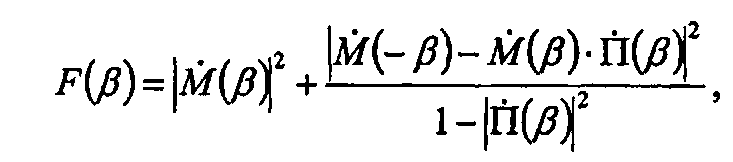
Целесообразно, чтобы преобразование в угловой спектр второго порядка осуществляли в соответствии с математическим выражением
где  ,
,  - угловой спектр принятых сигналов в направлении измеренного азимута объекта по углам места β и -β прямого и отраженного от земной поверхности сигнала соответственно,
- угловой спектр принятых сигналов в направлении измеренного азимута объекта по углам места β и -β прямого и отраженного от земной поверхности сигнала соответственно,  , N' - общее число антенн, n - порядковый номер антенны,
, N' - общее число антенн, n - порядковый номер антенны,  ,
,  - соответственно комплексная амплитуда принятого n-й антенной сигнала и ее комплексная диаграмма направленности в направлении измеренного азимута
- соответственно комплексная амплитуда принятого n-й антенной сигнала и ее комплексная диаграмма направленности в направлении измеренного азимута  объекта, звездочка * сверху и справа у
объекта, звездочка * сверху и справа у  означает операцию ее комплексного сопряжения,
означает операцию ее комплексного сопряжения,  - весовая функция.
- весовая функция.
Для отраженного сигнала  - соответственно комплексная амплитуда принятого n-й антенной сигнала и ее комплексная диаграмма направленности в направлении измеренного азимута
- соответственно комплексная амплитуда принятого n-й антенной сигнала и ее комплексная диаграмма направленности в направлении измеренного азимута  объекта для отраженного от земной поверхности сигнала. Однопараметрическая максимизация углового спектра второго порядка осуществляется только по параметру измеренного азимута
объекта для отраженного от земной поверхности сигнала. Однопараметрическая максимизация углового спектра второго порядка осуществляется только по параметру измеренного азимута  объекта, а по максимуму F(β) судят об истинном угле места
объекта, а по максимуму F(β) судят об истинном угле места  объекта.
объекта.
Решение поставленной технической задачи основывается на двулучевом пеленговании прямой и отраженной от земной поверхности волны, которые приходят с одного азимута, но зеркально симметрично по углу места, в верхней и нижней полуплоскости кольцевой решетки, с углами места, равными по модулю, но различающимися знаками. Учет данной закономерности обеспечивается получением углового спектра дополнительно по возможным углам места отраженного от земной поверхности луча. Однако при этом только антенн кольцевой решетки, в которой набеги фаз четны, пропорциональны косинусу угла места, для двухлучевого пеленгования недостаточно. Необходимые условия: наличие дополнительных антенн в вертикальной плоскости с нечетной (пропорционально синусу) зависимостью набегов фаз, причем в количестве не менее двух. Прием сигналов, по крайней мере, в трех (совместно с антеннами решетки) уровнях по вертикали обеспечивает необходимые условия разделения лучей, так как с учетом амплитуды и фазы принимаемых колебаний для трех уровней, описывающая их система содержит шесть уравнений при ровно шести неизвестных: амплитуда, фаза, угол прихода прямого и отраженного луча.
При соблюдении указанных условий угловой спектр второго порядка, получаемый по совокупности сигналов всех N' антенн (кольцевой решетки и дополнительных), имеет максимум в окрестности истинного двухмерного пеленга со снижением погрешности измерений. Существенным является также осевая симметрия антенной системы: кольцевой решетки и дополнительных антенн. Это позволяет определять азимут одним из известных способов по принятым сигналам кольцевой решетки, а угол места путем однопараметрической максимизации углового спектра второго порядка в направлении измеренного азимута. Последним действием исключается процедура определения и максимизации двухмерного углового спектра, как в ближайшем аналоге, что приводит к сокращению количества выполняемых операций по обработке сигналов и в итоге к уменьшению времени двухмерного пеленгования.
Учет указанных закономерностей в соответствии с предложенными новыми действиями, условиями и порядком их выполнения, позволяет достичь указанного технического результата: повысить точность измерения угла места и быстродействие пеленгования.
Указанные преимущества, а также особенности настоящего изобретения поясняются вариантом его выполнения со ссылками на прилагаемые фигуры.
На фиг.1 представлена структурная схема радиопеленгатора для реализации заявленного способа;
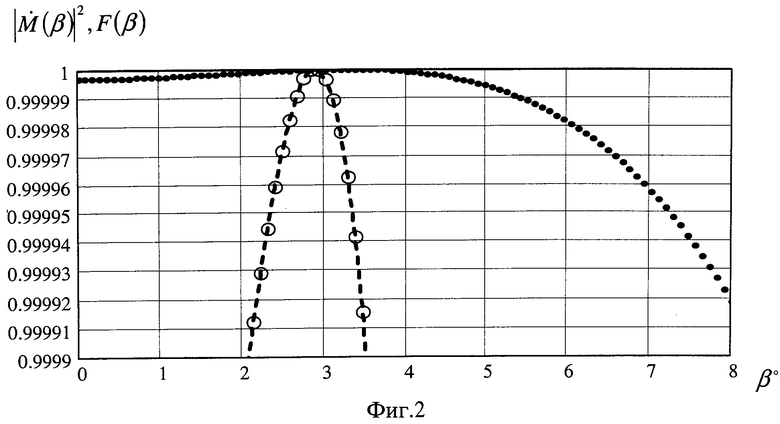
на фиг.2 показаны угловые спектры;
на фиг.3 - зависимости измеренных углов места от дальности до объекта;
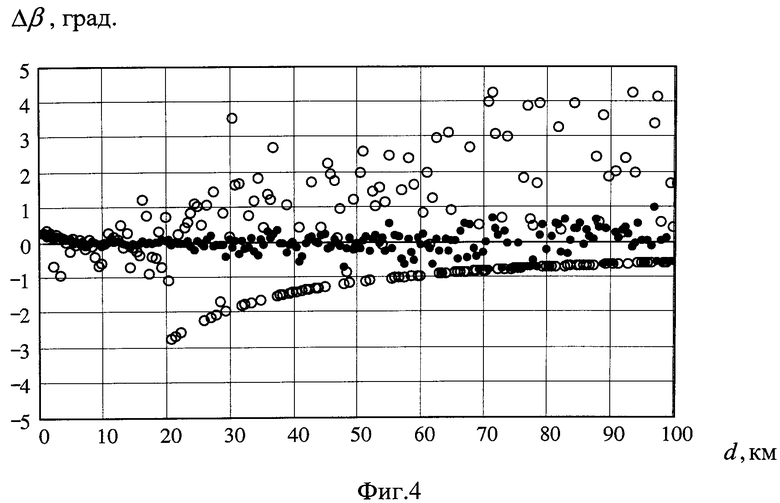
на фиг.4 - зависимости погрешности измерений углов места от дальности до объекта.
Радиопеленгатор для реализации заявленного способа (фиг.1) содержит антенны 1.0-1.N'-1, подключенные к входам 0-N'-1 радиоприемного устройства 2, выходами 0-N-1 соединенного с одноименными входами блока 3 определения азимута и анализатора 4 углового спектра. Входы N-N'-1 анализатора 4 углового спектра подключены к одноименным выходам радиоприемного устройства 2, а вход N' - к выходу блока 3 определения азимута, выход которого подсоединен к входу блока 5 расчета весовой функции и к первому входу индикатора 8. Преобразователь 6 углового спектра, устройство 7 определения минимума и индикатор 8 соединены последовательно. Первый и второй выход анализатора 4 углового спектра соответственно соединен с первым и вторым входом преобразователя 6 углового спектра, а его третий вход соединен с выходом блока 5 расчета весовой функции.
Все антенны 1.0-1.N'-1 могут быть выполнены идентичными, всенаправленными в горизонтальной плоскости, например типа симметричный вибратор. Антенны 1.0-1.N-1 образуют кольцевую решетку (эквидистантную) с числом антенн в ней N>3. Для обеспечения в последующем однозначности фазовых измерений радиус ρ кольцевой решетки выбирают из условия непревышения расстояния между ближайшими антеннами 1.0-1.N-1 кольцевой решетки половины длины волны излучения. Кольцевую решетку ориентируют опорной 1.0 антенной на север. Фазовые центры антенн кольцевой решетки располагают в одной горизонтальной плоскости на высоте h над земной поверхностью, порядка единиц-десятков метров. Дополнительные антенны 1.N-1.N'-1 в количестве не менее двух устанавливают на нормали к плоскости решетки из ее центра, например, с постоянным шагом δh относительно плоскости антенной решетки на высоте Δhn, определяемой по формуле Δhn=δh-(n+1-N), где n=N, …, N'-1 порядковый номер дополнительной антенны, N, N' - число антенн кольцевой решетки и общее число антенн соответственно.
Радиоприемное устройство 2 многоканальное с числом каналов, равным общему числу антенн N', выполняет фильтрацию и синхронное преобразование принятых сигналов с цифровым измерением и представлением в виде комплексных амплитуд (квадратурных составляющих).
Пеленгование воздушного объекта происходит следующим образом. Излучение бортового передатчика принимают антеннами 1.0-1.N'-1 и в радиоприемном устройстве 2 измеряют их комплексные амплитуды  , где
, где  - мгновенные значения напряженности поля, ξn - шумы приема, n=0, …, N'-1.
- мгновенные значения напряженности поля, ξn - шумы приема, n=0, …, N'-1.
В пункт пеленгования от бортового передатчика воздушного объекта приходит прямая и отраженная от земной поверхности волна. При этом согласно методу зеркального отображения мгновенные значения напряженности поля  , принимаемого антеннами радиопеленгатора, определяются соотношением
, принимаемого антеннами радиопеленгатора, определяются соотношением

где  ,
,  - комплексная амплитуда напряженности поля прямого и отраженного сигнала в центре кольцевой решетки,
- комплексная амплитуда напряженности поля прямого и отраженного сигнала в центре кольцевой решетки,  - диаграммы направленности антенн для прямого сигнала,
- диаграммы направленности антенн для прямого сигнала,  - то же, для отраженного сигнала, θ, β - азимут и угол места.
- то же, для отраженного сигнала, θ, β - азимут и угол места.
Отсчет положительных значений углов места β выполняют от линии, параллельной земной поверхности к зениту, азимута θ от опорной антенны (с порядковым номером n=0) в направлении по часовой стрелке.
Диаграммы направленности антенн в свободном пространстве определяются, соответственно для кольцевой решетки (n=0, …, N-1) и дополнительных антенн (n=N, …, N'-1), по формулам


где i - мнимая единица, k=2π/λ - волновое число, λ - длина волны излучения, α=2π/N - квант углового положения антенн кольцевой решетки, ρ - радиус кольцевой решетки, Δhn - высота расположения дополнительных антенн.
Неизвестными параметрами являются азимут θ и угол места β объекта, а также, в силу неопределенности электрических параметров земной поверхности в области отражения, комплексные амплитуды лучей. Последующие действия над сигналами направлены на преодоление этой априорной неопределенности.
В блоке 3 определения азимута по результатам измерений комплексной амплитуды сигналов решетки, поступающим по входам 0-N-1 с одноименных выходов радиоприемного устройства 2, оценивают разности фаз Δφn между сигналами ближайших антенн кольцевой решетки по формуле:  , где
, где  - аргумент комплексного числа, заключенного в скобки (фаза вектора),
- аргумент комплексного числа, заключенного в скобки (фаза вектора),  - комплексная амплитуда принятого n-й антенной сигнала, звездочка * сверху и справа у
- комплексная амплитуда принятого n-й антенной сигнала, звездочка * сверху и справа у  означает операцию ее комплексного сопряжения, ⊕ - операция сложения по модулю N, и рассчитывают азимут объекта
означает операцию ее комплексного сопряжения, ⊕ - операция сложения по модулю N, и рассчитывают азимут объекта

Оценивание пеленга по формуле (4) не требует выполнения двухмерного преобразования сигналов в угловой спектр, как осуществляется в ближайшем аналоге, что сокращает число операций обработки принятых сигналов, уменьшает время пеленгования и упрощает техническую реализацию заявленного способа.
В случае превышения расстояния между ближайшими антеннами кольцевой решетки половины длины волны излучения можно рекомендовать применение метода многошкальных измерений разностей фаз.
В анализаторе 4 углового спектра преобразуют принятые сигналы, поступающие по входам 0-N'-1 с одноименных выходов радиоприемного устройства 2, в угловой спектр. Это преобразование выполняют путем умножения принятых сигналов на комплексно сопряженные диаграммы направленности антенн [в соответствии с математическими выражениями (2), (3)] и усреднения результатов умножения по совокупности антенн в направлении полученного азимута [в соответствии с математическим выражением (4)] объекта, поступающего на вход N' анализатора 4 с выхода блока 3, по формуле

Преобразование (5) выполняют по возможным углам места объекта β прямого сигнала (луча) и отраженного сигнала (луча) -β, то есть для положительных и отрицательных углов места.
Результаты для положительных значений углов места  поступают на первый выход анализатора 4 углового спектра, а симметричные им для отрицательных значений
поступают на первый выход анализатора 4 углового спектра, а симметричные им для отрицательных значений  по второму выходу.
по второму выходу.
Одновременно в блоке 5 расчета определяют весовую функцию, также в направлении азимута (4) и по возможным углам места объекта:

Преобразование (6) аналогично операции (5), но входными величинами для него являются диаграммы направленности антенн в области положительных (прямой сигнал) и отрицательных (отраженный сигнал) значений угла места.
В преобразователе углового спектра 6 по результатам (5), (6) определяют угловой спектр второго порядка по формуле

Угловой спектр второго порядка (7) отличается от углового спектра ближайшего аналога наличием второго слагаемого, в котором учитывается наличие как прямого, так и отраженного от земной поверхности сигнала.
Типичный вид углового спектра второго порядка в соответствии с математическим выражением (7) показан на фиг.2 пунктирной линией с кружками. Для сравнения точками показан квадрат модуля углового спектра сигналов антенн решетки  в соответствии с выражением (5). Спектры нормированы на максимальное значение и получены для истинного угла места объекта, равного 2,8 градуса. Видно, что максимум углового спектра второго порядка F(β) находится в окрестности истинного значения угла места. Этот спектр сосредоточен в существенно меньшей области возможных углов места, чем квадрат модуля
в соответствии с выражением (5). Спектры нормированы на максимальное значение и получены для истинного угла места объекта, равного 2,8 градуса. Видно, что максимум углового спектра второго порядка F(β) находится в окрестности истинного значения угла места. Этот спектр сосредоточен в существенно меньшей области возможных углов места, чем квадрат модуля  углового спектра сигналов антенн кольцевой решетки, что повышает точность измерения истинного угла места
углового спектра сигналов антенн кольцевой решетки, что повышает точность измерения истинного угла места  в присутствии шумов.
в присутствии шумов.
В устройстве определения максимума 7 определяют угол места объекта как положение максимума углового спектра второго порядка. Результаты определения пеленга θ (вход 1 индикатора 8) и истинного угла места  объекта (вход 2) отражаются на индикаторе 8.
объекта (вход 2) отражаются на индикаторе 8.
Таким образом, как показано выше, удается достичь повышение точности измерения угла места объекта и сокращение времени пеленгования за счет упрощения обработки принятых сигналов.
Количественная оценка выполнена методом имитационного моделирования для следующих условий.
Исследовался радиопеленгатор, размещенный над морской поверхностью с относительной диэлектрической проницаемостью, равной 75, и удельной проводимостью 3 Ом/м и содержащий 3-элементную антенную решетку радиусом 0,25 м, поднятую на высоту 15 м, и две дополнительные антенны, установленные над плоскостью решетки на высоту 1 и 2 м. Задана предельная чувствительность пеленгования 2 мкВ/м. Высота воздушного объекта 1000 м, мощность передатчика 10 Вт, длина волны излучения 1 м. Моделирующая программа разработана в системе Mathcad.
Результаты моделирования показаны на фиг.3, 4 в виде зависимости измеренных углов места  и погрешности измерений Δβ от дальности d до объекта для ближайшего аналога кружками, а для заявленного способа решения - точками. Истинные значения угла места указаны на фиг.3 тонкой сплошной линией.
и погрешности измерений Δβ от дальности d до объекта для ближайшего аналога кружками, а для заявленного способа решения - точками. Истинные значения угла места указаны на фиг.3 тонкой сплошной линией.
Видно, что погрешности измерений в предлагаемом способе на расстоянии до объекта, большем 1 км, примерно на порядок меньше и не превышают по модулю одного градуса на дальности до 100 км. Максимальное значение дальности для ближайшего аналога при указанном уровне погрешности ограничено величиной порядка 15 км. Повышение точности измерения угла места предлагаемым способом позволяет упростить, сделать более надежным и безопасным сопровождение воздушного судна на необорудованные навигационными установками аэродромы или, например, буровые площадки, строительные объекты, сельскохозяйственные угодья и т.п.
Наиболее успешно заявленный способ двухмерного пеленгования воздушного объекта промышленно применим для пеленгации летательных средств (самолетов, вертолетов, дирижаблей) с высокой точностью в сложной радиоэлектронной обстановке.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПЕЛЕНГОВАНИЯ ВОЗДУШНОГО ОБЪЕКТА | 2014 |
|
RU2567850C1 |
| СПОСОБ АМПЛИТУДНОГО ДВУХМЕРНОГО ПЕЛЕНГОВАНИЯ | 2018 |
|
RU2686113C1 |
| СПОСОБ ДВУХМЕРНОГО ПЕЛЕНГОВАНИЯ | 2018 |
|
RU2711341C1 |
| СПОСОБ МЕСТООПРЕДЕЛЕНИЯ НАД ЗЕМНОЙ ПОВЕРХНОСТЬЮ ИЗЛУЧАТЕЛЯ ИЛИ ПЕЛЕНГАТОРНЫХ АНТЕНН | 2019 |
|
RU2711400C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДВУХМЕРНОГО ПЕЛЕНГА | 2005 |
|
RU2288481C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОГО СПЕКТРА | 2011 |
|
RU2452974C1 |
| Способ двухмерного моноимпульсного пеленгования источников радиоизлучений | 2019 |
|
RU2696095C1 |
| Способ радиолокации | 2016 |
|
RU2692467C2 |
| СПОСОБ ОБНАРУЖЕНИЯ И ПЕЛЕНГОВАНИЯ РАДИОСИГНАЛОВ | 2005 |
|
RU2289146C9 |
| Способ амплитудного двухмерного пеленгования | 2016 |
|
RU2620130C1 |

Изобретение относится к области радиотехники. Достигаемый технический результат - повышение точности измерения угла места объекта и сокращение времени пеленгования. Указанный технический результат достигается тем, что принимают сигналы передатчика объекта с помощью антенн, образующих кольцевую решетку, расположенную параллельно земной поверхности, измеряют по принятым сигналам азимут объекта, принимают сигналы, по меньшей мере, двумя дополнительными антеннами, расположенными на центральной оси кольцевой решетки ортогонально ее плоскости, преобразуют принятые сигналы в угловой спектр по углам места прямого и отраженного от земной поверхности сигнала в направлении измеренного азимута объекта, при этом угловой спектр преобразуют в угловой спектр второго порядка, а угол места объекта определяют путем однопараметрической максимизации углового спектра второго порядка. 1 з.п. ф-лы, 4 ил.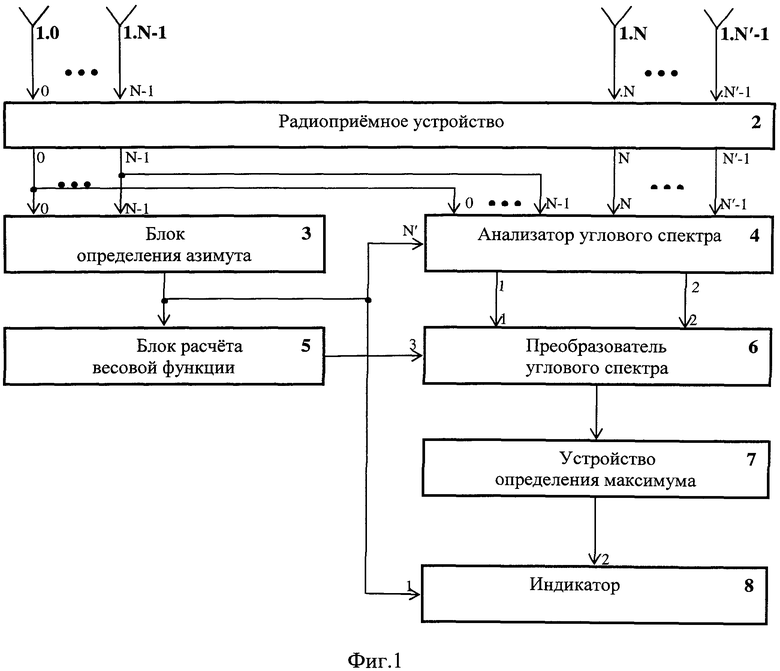
1. Способ двухмерного пеленгования воздушного объекта, заключающийся в том, что принимают сигналы передатчика объекта с помощью антенн, образующих кольцевую решетку, расположенную параллельно земной поверхности, измеряют по принятым сигналам азимут объекта, преобразуют принятые сигналы в угловой спектр по углам места, отличающийся тем, что принимают сигналы, по меньшей мере, двумя дополнительными антеннами, расположенными на центральной оси кольцевой решетки ортогонально ее плоскости, преобразуют принятые сигналы в угловой спектр по углам места прямого и отраженного от земной поверхности луча в направлении измеренного азимута объекта, угловой спектр преобразуют в угловой спектр второго порядка, а угол места объекта определяют из однопараметрической максимизации углового спектра второго порядка, который получают путем учета как прямого, так и отраженного от земной поверхности луча, а также количества используемых антенн, их комплексных диаграмм направленности и комплексных амплитуд принятых антеннами сигналов.
2. Способ двухмерного пеленгования воздушного объекта по п.1, отличающийся тем, что угловой спектр второго порядка получают
по формуле преобразования
где  ,
,  - угловой спектр принятых сигналов в направлении измеренного азимута объекта по углам места β прямого и отраженного -β от земной поверхности луча,
- угловой спектр принятых сигналов в направлении измеренного азимута объекта по углам места β прямого и отраженного -β от земной поверхности луча,  N′ - общее число антенн, n - порядковый номер антенны,
N′ - общее число антенн, n - порядковый номер антенны,  ,
,  - соответственно комплексная амплитуда принятого n-й антенной сигнала и ее комплексная диаграмма направленности в направлении измеренного азимута
- соответственно комплексная амплитуда принятого n-й антенной сигнала и ее комплексная диаграмма направленности в направлении измеренного азимута  объекта, звездочка * сверху и справа от величины означает операцию ее комплексного сопряжения, - весовая функция.
объекта, звездочка * сверху и справа от величины означает операцию ее комплексного сопряжения, - весовая функция.
| САИДОВ А.С | |||
| и др | |||
| Проектирование фазовых автоматических пеленгаторов | |||
| Москва, "Радио и связь", 1997, глава 11, с | |||
| Способ очищения сернокислого глинозема от железа | 1920 |
|
SU47A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОГО СПЕКТРА | 2011 |
|
RU2452974C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ПЕЛЕНГОВАНИЯ ВОЗДУШНЫХ ОБЪЕКТОВ | 2010 |
|
RU2431864C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ПРОСТРАНСТВЕННОЙ ЛОКАЛИЗАЦИИ ВОЗДУШНЫХ ОБЪЕКТОВ | 2010 |
|
RU2444754C1 |
| СПОСОБ ПАССИВНОГО ОБНАРУЖЕНИЯ ВОЗДУШНЫХ ОБЪЕКТОВ | 2011 |
|
RU2472176C1 |
| WO 2000039601, 06.07.2000 | |||
| US 4626859 A, 02.12.1986 | |||
| Устройство для механической раскатки штабелей бревен | 1936 |
|
SU50070A1 |

