Изобретение относится к области защиты от помех в радиолокационных системах и может быть использовано для создания помехоустойчивых систем сопровождения (наведения).
Известен способ обнаружения мерцающей помехи, основанный на различиях моделей состояния, используемых при фильтрации угловых координат цели в условиях отсутствия мерцающей помехи и при ее наличии. (Меркулов В.И. Синтез обнаружителя-анализатора имитирующих помех методом параметрической идентификации моделей состояния / В.И. Меркулов, В.Д. Добыкин // Радиотехника и электроника. - 1997. - Т. 42, №2. - С. 183-187)
Сущность данного способа заключается в следующем. Одновременно с фильтрацией угловых координат цели производится оценивание параметров используемых моделей состояния. При отсутствии мерцающих помех полученные оценки параметров моделей состояния соответствуют принятым моделям состояния при фильтрации угловых координат цели в условиях отсутствия мерцающей помехи. При превышении установленного порога разностью оценок параметров моделей состояния и их априорных значений принимается решение о наличии мерцающей помехи, при этом величина порога определяет вероятность принятия ложного решения о наличии помехи.
Недостатком данного способа является то, что он не обеспечивает обнаружения мерцающей помехи с плавным изменением мощности сигнала, поскольку в этом случае порог превышен не будет. (Перунов Ю.М. Радиоэлектронное подавление информационных каналов систем управления оружием / Ю.М. Перунов, К.И. Фомичев, Л.М. Юдин. - М.: Радиотехника, 2003. - 416 с.)
Под мерцающей помехой с плавным изменением мощности сигнала понимается такая синхронная мерцающая помеха, осуществляемая объектом (целью), в качестве которой выступает пара летательных аппаратов со станциями РЭБ и связанная боевым порядком, при которой мощность сигналов постановщиков активной шумовой помехи изменяется плавно, при этом энергетический центр суммарного принимаемого сигнала изменяет свое угловое положение таким образом, что закон этого изменения аналогичен закону изменения углового положения одиночной маневрирующей цели.
Известен способ обнаружения мерцающей помехи, основанный на использовании выходных сигналов многоканального измерителя, в котором наряду с сигналами основного измерительного канала дополнительно используются сигналы двух «сторожевых» измерительных каналов, расстроенных относительно основного по направлению. (Меркулов В.И. Синтез угломера, защищенного от мерцающих радиопомех / В.И. Меркулов, В.Д. Добыкин // Радиотехника и электроника. - 1997. - Т. 42, №9. - С. 1057-1063)
Недостаток данного способа заключается в том, что при воздействии мерцающей помехи с плавным изменением мощности сигнала угловое положение энергетического центра суммарного принимаемого сигнала находится в пределах значений возможных ошибок сопровождения маневрирующей цели по угловым координатам, поэтому обнаружение воздействия данной помехи имеет низкую вероятность.
Известен способ обнаружения мерцающих помех, принятый в качестве прототипа, основанный на анализе изменений характеристик обновляющего процесса в фильтре, представляющего собой разность измеренного и прогнозируемого значений угловой координаты. В соответствии с данным способом решение о воздействии мерцающей помехи принимается в случае превышения квадрата значения невязки обновляющего процесса определенного порога. (В.Д. Добыкин. Обнаружитель помехи на основе анализа обновляющего процесса / В.Д. Добыкин В.И. Меркулов // Радиотехника и электроника. - 1997. - Т. 42, №3. - С. 302-306)
Недостаток данного способа заключается в том, что в процессе сопровождения цели обеспечивается достоверное обнаружение только резких скачкообразных изменений в наблюдаемом процессе на входе оптимального фильтра угловых координат, что свойственно воздействию мерцающих помех при коммутации передатчиков помех по прямоугольному закону. В свою очередь воздействие мерцающей помехи с плавным изменением мощности сигнала приводит к постепенным, то есть плавным изменениям в наблюдаемом процессе на входе оптимального фильтра. Плавное изменение свойств процесса на входе оптимального фильтра не приводит к увеличению значений невязки обновляющего процесса более установленного порога, что не позволяет осуществлять обнаружение мерцающей помехи с плавным изменением мощности сигнала. При плавном изменении мощности передатчиков, реализующих мерцающую помеху, процесс на входе оптимального фильтра угловых координат воспринимается как маневр цели, осуществляющей постановку шумовой маскирующей помехи.
Техническим результатом предлагаемого изобретения является повышение вероятности обнаружения воздействия мерцающей помехи с плавным изменением мощности сигнала на измеритель угловых координат.
Указанный технический результат достигается тем, что дополнительно определяют угловое положение энергетического центра объекта несколькими парами территориально распределенных измерителей, используя триангуляционный метод определяют координаты пространственного положения объекта для каждой пары измерителей, по значениям которых рассчитывают рассогласование в координатах пространственного положения объекта, и если полученные рассогласования в результате сравнения с априорным пороговым значением, определяющим область допустимых ошибок измерений координат с заданной вероятностью, оказываются больше, то принимается решение о наличии помехи.
Сущность изобретения состоит в том, что в известном способе, основанном на учете изменений обновляющего процесса, при котором облучают объект, принимают от него смесь отраженного и помехового сигнала, определяют угловое положение энергетического центра объекта, дополнительно определяют угловое положение энергетического центра объекта в двух пространственно разнесенных измерителях, на основании всех возможных сочетаний пар определенных значений углового положения энергетического центра объекта вычисляют координаты цели в декартовой системе координат триангуляционным методом, используя значения координат объекта, полученных на основании значений углового положения от различных пар измерителей, рассчитывают рассогласования, которые сравнивают с заданным порогом и по результатам сравнений формируют итоговый результат обнаружения мерцающей помехи с плавным изменением мощности сигнала.
Изобретение осуществляется следующим образом.
Существующие в угломерных измерителях азимутальный канал и канал угла места независимы и идентичны, поэтому рассмотрение угломерного измерителя можно производить на примере азимутального канала. При отсутствии мерцающих помех измерители угловых координат формируют оценку угловых координат геометрического центра парной цели. Воздействие мерцающей помехи с плавным изменением мощности сигнала на все измерители приводит к появлению ошибок Δφ(1), Δφ(2), Δφ(3) в оценках угловых координат во всех разнесенных измерителях (фигура).
На фигуре обозначено П1, П2, П3 - разнесенные в пространстве измерители с координатами  где
где  Bij - расстояние между i-м и j-м измерителями (база); Ψji - направление в i-м измерителе на j-й измеритель,
Bij - расстояние между i-м и j-м измерителями (база); Ψji - направление в i-м измерителе на j-й измеритель,  - измеренные значения угловых координат.
- измеренные значения угловых координат.
Величина ошибки оценки угловой координаты геометрического центра парной цели в различных измерителях будет различна вследствие естественного несогласованного воздействия помехи на разнесенные измерители 
Координаты энергетического центра объекта (цели), определяемые по значениям оценок угловых координат,φ(i), φ(j)
 , вычисляются по выражениям
, вычисляются по выражениям
где {X(i), Y(i)} - прямоугольные координаты i-го измерителя в принятой системе координат; Bij - расстояние между i-м и j-м измерителями (база); Ψji - направление в i-м измерителе на j-й измеритель.
В значениях координат  полученных от различных пар измерителей
полученных от различных пар измерителей  вследствие несогласованного воздействия мерцающей помехи с плавным изменением мощности сигнала наблюдается существенное расхождение. Используя данное расхождение, назовем его рассогласованием в определении значений координат сопровождаемой парной цели
вследствие несогласованного воздействия мерцающей помехи с плавным изменением мощности сигнала наблюдается существенное расхождение. Используя данное расхождение, назовем его рассогласованием в определении значений координат сопровождаемой парной цели  сравнивают его с пороговым значением и получают при этом частные решения о воздействии мерцающей помехи с плавным изменением мощности сигнала, затем объединяют частные решения по определенному правилу и получают конечное решение о воздействии помехи.
сравнивают его с пороговым значением и получают при этом частные решения о воздействии мерцающей помехи с плавным изменением мощности сигнала, затем объединяют частные решения по определенному правилу и получают конечное решение о воздействии помехи.
При использовании N угломерных измерителей N≥3 количество пар позиций M, по измерениям которых, независимо от других, получают координаты парной цели 
 определяется как число сочетаний из N по 2:
определяется как число сочетаний из N по 2:

На основании множества полученных координат  формируют множество рассогласований
формируют множество рассогласований  элементы которого δ(q) находят как разность l-го и p-го значений соответствующих координат
элементы которого δ(q) находят как разность l-го и p-го значений соответствующих координат

Количество этих элементов Q определяют как число сочетаний из M по 2

Далее каждый элемент δ(q) множества Δ сравнивают с пороговым значением λ, которое характеризует область допустимых ошибок измерений координат с заданной вероятностью λ=3σχ, где σχ={<σX, σY} - среднеквадратическая ошибка определения координат цели триангуляционным методом. Результат сравнения I(q) принимает значения ноль или единица.

где 
Затем результаты сравнения всех элементов множества, в соответствии с принятым правилом решения, дают результат, который и является значением функции обнаружения J. Правило принятия решения соответствует выражению

где  - операция конъюнкции.
- операция конъюнкции.
Таким образом, предлагаемый способ позволяет повысить вероятность обнаружения воздействия мерцающей помехи с плавным изменением мощности сигнала на измеритель угловых координат.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ защиты радиолокационной станции от воздействия пассивных помех, обусловленных магнитно-ориентированными неоднородностями электронной концентрации ионосферы | 2016 |
|
RU2616969C1 |
| СПОСОБ АДАПТИВНОГО ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ | 1999 |
|
RU2172964C1 |
| СПОСОБ РАДИОКОНТРОЛЯ | 2014 |
|
RU2560098C1 |
| СПОСОБ ЗАЩИТЫ РАДИОЛОКАЦИОННОЙ СТАНЦИИ С МОНОИМПУЛЬСНОЙ ПЕЛЕНГАЦИЕЙ ОТ МНОГОКРАТНЫХ ОТВЕТНО-ИМПУЛЬСНЫХ ПОМЕХ | 2023 |
|
RU2815879C1 |
| АДАПТИВНЫЙ СПОСОБ ЗАЩИТЫ ОБЪЕКТА ОТ УПРАВЛЯЕМОЙ ПО ЛАЗЕРНОМУ ЛУЧУ РАКЕТЫ | 2014 |
|
RU2553407C1 |
| Способ однозначной первичной дальнометрии группы целей на фоне узкополосных пассивных помех в режиме высокой частоты повторения импульсов зондирующего сигнала | 2020 |
|
RU2756034C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ РАДИОЛОКАЦИОННОЙ СИСТЕМЫ НА БАЗЕ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ С УПРАВЛЯЕМЫМИ ПАРАМЕТРАМИ ИЗЛУЧЕНИЯ | 2013 |
|
RU2543511C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО РАСПОЗНАВАНИЯ КЛАССОВ ВОЗДУШНО-КОСМИЧЕСКИХ ОБЪЕКТОВ ДЛЯ МНОГОДИАПАЗОННОГО РАЗНЕСЕННОГО РАДИОЛОКАЦИОННОГО КОМПЛЕКСА С ФАЗИРОВАННЫМИ АНТЕННЫМИ РЕШЕТКАМИ | 2020 |
|
RU2741057C1 |
| СПОСОБ И УСТРОЙСТВО СОЗДАНИЯ КОГЕРЕНТНОЙ ПОМЕХИ | 2018 |
|
RU2698712C1 |
| СПОСОБ УПРАВЛЕНИЯ ГРУППОЙ МАНЕВРЕННЫХ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2022 |
|
RU2818981C1 |
Изобретение относится к области радиолокации и может быть использовано для создания помехоустойчивых систем сопровождения (наведения). Достигаемый технический результат - повышение вероятности обнаружения воздействия мерцающей помехи с плавным изменением мощности сигнала на измеритель угловых координат. Сущность изобретения состоит в том, что способ основан на учете изменений обновляющего процесса, при котором облучают объект (цель), принимают от него смесь отраженного и помехового сигнала, определяют угловое положение энергетического центра объекта (цели), дополнительно определяют угловое положение энергетического центра объекта (цели) еще в двух пространственно разнесенных измерителях. Затем на основании всех возможных сочетаний пар полученных значений углового положения энергетического центра объекта (цели) вычисляют координаты цели в декартовой системе координат триангуляционным методом, с использованием значений координат, полученных от различных пар позиций, при воздействии мерцающей помехи с плавным изменением мощности сигнала рассчитывают рассогласования, которые сравнивают с заданным порогом и по результатам сравнений формируют функцию обнаружения мерцающей помехи с плавным изменением мощности сигнала. 1 ил.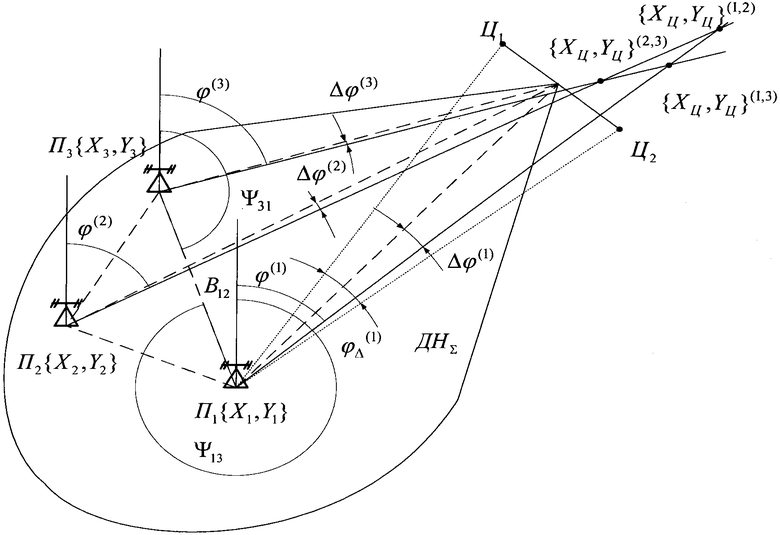
Способ обнаружения мерцающей помехи с плавным изменением мощности сигнала, основанный на облучении объекта, приеме от него смеси отраженного и помехового сигнала, определении углового положения энергетического центра объекта, отличающийся тем, что дополнительно определяют угловое положение энергетического центра объекта несколькими парами территориально распределенных измерителей, используя триангуляционный метод определяют координаты пространственного положения объекта для каждой пары измерителей, по значениям которых рассчитывают рассогласование в координатах пространственного положения объекта, и если полученные рассогласования в результате сравнения с априорным пороговым значением, определяющим область допустимых ошибок измерений координат с заданной вероятностью, оказываются больше, то принимается решение о наличии помехи.
| ДОБЫКИН В.Д | |||
| Обнаружитель помехи на основе анализа обновляющего процесса | |||
| /Добыкин В.Д., Меркулов В.И.// Радиотехника и электроника | |||
| Электрическое сопротивление для нагревательных приборов и нагревательный элемент для этих приборов | 1922 |
|
SU1997A1 |

