Изобретение относится к способам получения радиолокационной информации о воздушно-космических объектах (ВКО) и может быть использовано для обнаружения и радиолокационного распознавания классов (РРК) ВКО в радиолокационных комплексах (РЛК) в составе радиолокационных модулей (РЛМ) разного диапазона длин волн с фазированными антенными решетками (ФАР), которые возможно объединить в бистатические РЛК для совместной обработки информации.
Предлагаемое техническое решение относится к области оборонной техники, в частности к радиолокационным станциям с ФАР, и может быть использовано для организации противовоздушной обороны войск и военных объектов от поражения средствами воздушного нападения противника в условиях радиоэлектронного подавления.
Техническим результатом заявляемого изобретения является сохранение дальности обнаружения и повышение вероятностей правильного распознавания радиолокационных объектов.
Результат достигается за счет комплексирования в единую радиолокационную систему РЛМ, работающих в разных диапазонах длин волн на совмещенной позиции, и РЛМ тех же диапазонов длин волн, находящихся на разнесенных позициях и использующих возможности переотраженной радиолокации.
Известны способы РРК ВКО, которые используют различные признаки (словари признаков) для распознавания [1, 2, 3]. При этом первичным является определение ограниченного алфавита классов ВКО [1, 2], далее осуществляется оценивание воздушной цели по используемым признакам распознавания и дальнейшая идентификация класса этой цели.
Наиболее применимы траекторные признаки, сигнальные признаки, собственное радиоизлучение, комплексные характеристики ВКО. В конкретных типах РЛК, РЛМ, как правило, используются многоэтапные процедуры РРК, анализирующие последовательно несколько признаков. Наиболее доступными с точки зрения получения информации, являются траекторные признаки (координаты ВКО, параметры их движения, скорости изменения координат и параметров движения, маневренные характеристики). Для каждого априорно заданного к РРК ВКО определены граничные значения траекторных признаков, нахождение ВКО в пространстве возможных значений каждого признака позволяет осуществлять первичное РРК. Такие классы ВКО, как вертолеты, крылатые ракеты (КР), гиперзвуковые летательные аппараты (ГЗЛА), автоматические дрейфующие аэростаты (АДА) в пространстве траекторных признаков (скорость и высота полета) не пересекаются, правильно распознаются с высокой вероятностью, так как существенно отличается сама физическая природа возможности движения указанных классов в воздушно-космическом пространстве.
Однако существует достаточное количество классов ВКО, которые могут одновременно находиться в заданных пространствах признаков (самолеты малых, средних и больших размеров на этапе стационарного полета), и правильно не распознаются с требуемым качеством по траекторным признакам (Фиг. 1). В таких случаях распознавание продолжается по сигнальным признакам, простейшим из которых является величина эффективной поверхности рассеивания (ЭПР).
По величине ЭПР и траекторным признакам наиболее сложно распознаются ракеты-ловушки (ложные цели). Имитирующие тракторные признаки наиболее опасных ВКО (самолетов тактической, палубной, стратегической авиации), ракеты-ловушки имеют малые размеры и малую ЭПР, а для имитации ЭПР применяются специальные устройства (линзы Люнеберга, отражатели Ван-Атта), увеличивающие ЭПР. Для распознавания ракет-ловушек существуют способы, основанные на определении размеров ВКО по сигнальным признакам.
Наиболее близким по технической сущности является способ распознавания ВКО в многодиапазонных РЛК (МДРЛК), реализованный в устройстве распознавания ВКО в двухдиапазонных РЛК с активными ФАР (патент РФ №2665032 С2, МПК G01S 13/52, опубл. 27.08.2018 г.) (прототип) [4]. В данном изобретении предлагается использовать современные радиолокационные технологии адаптивного взаимодействия РЛМ разного диапазона длин волн, которые позволяют при двухэтапном распознавании с поимпульсной перестройкой частоты в двухдиапазонных комплексах значительно уменьшить временные затраты на решение задачи распознавания.
Техническим результатом прототипа является улучшение тактико-технических характеристик, заключающееся в значительном уменьшении времени распознавания, увеличении рубежей выдачи информации о распознанном классе цели, обеспечивающие в дальнейшем увеличение алфавита распознаваемых классов ВКО (особенно скоростных) при достаточно высоком уровне вероятности и достоверности правильного распознавания классов цели, что достигается использованием адаптации частот зондирующего сигнала для распознавания по признаку продольного размера цели.
Недостатком прототипа является недостаточная дальность обнаружения и невозможность РРК ВКО в условиях радиоэлектронного подавления (РЭП) активными шумовыми помехами (АШП) применяемыми как с земли, в виде забрасываемых передатчиков помех, так и с воздуха, в виде специализированной аппаратуры устанавливаемой на самолеты, беспилотные летательные аппараты, ракеты, в результате чего в РЛК подавляются каналы обнаружения, селекции по дальности и скорости, а также при большой мощности помехи затрудняется угловая селекция из-за их воздействия по боковым лепесткам диаграммы направленности приемной антенны.
При организации противником РЭП применяются многолучевые системы создания АШП, используются антенны с диаграммами направленности в азимутальной плоскости шириной не более 15° и коэффициентом усиления до 20 дБ. Таким образом, помехи являются узконаправленными в пространстве, что позволяет использовать совместную обработку информации от разнесенных в пространстве РЛК (РЛМ) для сохранения их эффективности при РЭП.
Известен способ радиолокационного обзора пространства, основанный на взаимодействии разнесенных в пространстве радиолокационных станций, входящих в многопозиционную радиолокационную систему (В.Я. Аверьянов. Разнесенные радиолокационные станции и системы. Минск, «Наука и техника», 1978, с. 52-74) [5]. Преимущество такой системы состоит в том, что создать прицельные по направлению помехи разнесенным в пространстве РЛК весьма сложно, так как направление от источника активных помех на неизлучающую позицию часто неизвестно. А вынужденное излучение в широком секторе снижает плотность потока мощности помех, действующих на каждую позицию (В.С. Черняк. Многопозиционная радиолокация. М., «Радио и связь», 1993, с. 28-29) [6].
Однако недостатком данного способа являются значительные энергетические затраты при обзоре пространства, так как все станции системы должны осматривать одновременно каждый участок зоны обзора, в том числе и "пустые" направления (в которых отсутствуют цели и нет воздействия помех), и не могут быть использованы как независимо работающие разнесенные в пространстве РЛК. В результате это приводит к значительному уменьшению зоны обзора радиолокационной системы, состоящей из данных РЛК при заданном периоде обзора, либо увеличению времени обзора заданной зоны, т.е. превышению установленного энергетического ресурса за период обзора.
Известен способ обзора пространства радиолокационными станциями с фазированными антенными решетками (патент РФ №2646847 С2, МПК G01S 13/02, опубл. 12.03.2018 г.) [7], который позволяет на основе энергетических различий помеховых сигналов, наблюдаемых в разнесенных пунктах приема каждого РЛМ, осуществлять обзор пространства путем выбора варианта просмотра углового положения, в результате чего направления, в которых обеспечивается уверенное обнаружение целей на требуемой дальности, обзор пространства осуществляется однопозиционным РЛК, а направления, в которых плотность потока мощности постановщика активных помех не обеспечивает обнаружение цели на требуемой дальности, зондируются разнесенными РЛМ, обеспечивающие максимальное количество элементов разрешения в зоне обзора РЛК в условиях воздействия АШП, осматриваемых с заданным качеством обнаружения при ограниченном энергетическом ресурсе.
Недостатками данного способа является не использование возможности сохранения дальности обнаружения однопозиционного РЛК в составе РЛМ двух и более диапазонах длин волн, и не использование возможности получения дополнительных признаков РРК ВКО за счет многопозиционности РЛМ (РЛК), объединенных в МПРЛК при РЭП.
Разработанный способ позволяет устранить указанные недостатки.
Суть предлагаемого способа радиолокационного распознавания ВКО заключается в следующем.
На первом этапе на заданных позициях устанавливаются несколько однопозиционных РЛК имеющие в своем составе РЛМ разных диапазонов длин волн, входящие в единую радиолокационную систему, и осуществляется взаимная координатная привязка всех средств системы, т.е. обмен соответствующими значениями X1, Y1, Z1, Х2, Y2, Z2, Xn, Yn, Zn. После завершения процедуры взаимной координатной привязки РЛК начинается процесс поиска, обнаружения и сопровождения воздушных объектов в заданной области обзора.
На втором этапе информация от обнаруженных РЛМ метрового и дециметрового (сантиметрового) диапазона длин волн эхосигналах ВКО, содержащая дальность, азимут, угол места и амплитуду эхосигналов на каждой частоте зондирования, а также информация о госпринадлежности ВКО, поступает в блок обработки РЛК, в котором осуществляется дальнейший перерасчет координат в прямоугольную систему, завязка трассы по ВКО, привязка обнаруженных эхосигналов к существующим трассам, измеряется скорость ВКО по обобщенным от двух модулей координатам х и y (Vx, Vy) и его высота (Hi), а также осуществляется перерасчет приоритета трассы.
На третьем этапе определяется значение вертикальной составляющей скорости (VHi) по формуле:

где:
Δt - промежуток времени между замерами высот Hi и Hi+1
На четвертом этапе вычисляется значение трассовой скорости ВКО (VTi) по формуле:

На пятом этапе на основании полученных ранее вычислений осуществляется предварительное РРК ВКО по траекторным признакам. При этом происходит сопоставление информации о высоте ВКО, его вертикальной составляющей скорости и трассовой скорости с априорно заданной информацией о возможных значениях этих признаков для каждого класса цели. Для этого заранее закладывается априорная информация в виде координат точек плоскостей «трассовая скорость - высота», и «вертикальная составляющая скорости - высота», ограничивающих области возможных значений этих признаков для каждого класса ВКО. Затем оценивается попадание значений текущих составляющих вертикальной скорости, трассовой скорости и высоты полета ВКО в области возможных значений соответствующих плоскостей для каждого из распознаваемых классов ВКО.
Если по траекторным признакам окончательное решение о принадлежности ВКО к определенному классу принять нельзя или вероятность такого распознавания недостаточна, то дальнейшее распознавание осуществляется по сигнальным признакам: ЭПР ВКО и его продольному размеру.
На шестом этапе происходит распознавание по значениям ЭПР ВКО, которые оцениваются на основе данных о дальности и угле места цели, амплитуде ее эхосигналов и априорной зависимости дальности цели с ЭПР 1 м2 от угла места [8].
На седьмом этапе происходит распознавание по продольному размеру ВКО, который вычисляется на основе анализа амплитуд эхосигналов целей на каждой частоте, получаемых при многочастотном зондировании. Для этого при излучении многочастотного сигнала в каждом РЛМ многодиапазонного РЛК перестраивается частота зондирования сигнала от импульса к импульсу по заранее заданному периодическому закону.
Как указано в прототипе [4], временные затраты на измерение продольного размера ВКО, связанные с длительным контактом с целью для накопления эхосигнала на каждой частоте, могут быть значительно уменьшены при реализации измерения в РЛК с двухмодульным построением в два шага. Причем наибольших рубежей выдачи информации о классе цели и вероятностей правильного распознавания возможно добиться в двухдиапазонных РЛК метрово-дециметровых или метрово-сантиметровьгх длин волн.
На первом шаге седьмого этапа РЛМ метрового диапазона длин волн производится грубая оценка продольного размера, которая осуществляется посредством зондирования на двух частотах с поимпульсной перестройкой частоты и дальнейшего вычисления и усреднения частотного признака распознавания. При этом, зная расстояние между частотами, можно вычислить наибольший однозначно измеряемый продольный размер ВКО (Lmax) по формуле:

где:
с - скорость распространения электромагнитных волн;
Δƒ - расстояние между частотами.
Так же, определив диапазон частотной перестройки (ΔF), по теореме Котельникова можно вычислить наименьший продольный размер ВКО:

Таким образом, по частотному признаку распознавания можно, в рамках диапазона наиболее распространенных воздушных объектов от 4 м (авиационные ракеты) до 50 м (крупноразмерные самолеты), выделить три группы ВКО: малоразмерный воздушный объект - продольный размер от 4 до 12 м, среднеразмерный воздушный объект - продольный размер от 12 до 25 м и крупноразмерный воздушный объект - продольный размер от 25 до 50 м.
Количество излучаемых частот, необходимое для измерения продольного размера, определяется по формуле:
Значения расстояний между частотами, диапазоны частот и Их количество для точного измерения продольного размера ВКО и дальнейшего определения к одной из групп приведены в таблице.

На втором шаге седьмого этапа, определив оптимальный диапазон частот и шаг по частоте на основании грубой оценки продольного размера РЛМ метрового диапазона и зная координаты цели, производятся точные измерения продольного размера радиолокационным модулем коротковолнового диапазона (сантиметрового или дециметрового) длин волн с активной ФАР и двумерным электронным сканированием, осуществляющим длительный контакт с целью в режиме остановленного на воздушном объекте луча. При этом появляется возможность формирования узких диаграмм направленности антенны, как в азимутальной, так и в угломестной плоскостях, что обеспечивает большие точности измерения траекторных, тактических и сигнальных признаков распознавания. Также такой подход позволяет идентифицировать воздушные объекты со специальными устройствами изменяющими ЭПР (линзами Люнеберга, отражатели Ван-Атта).
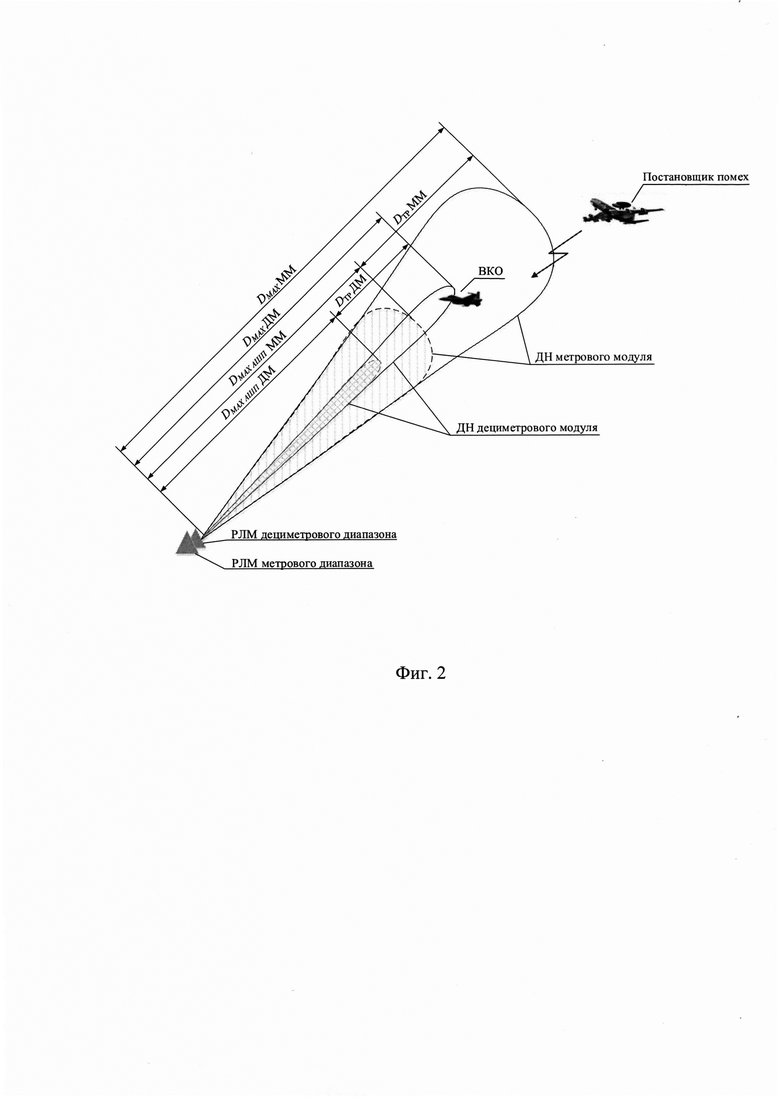
На фиг. 2. представлена схема построения двухдиапазонного РЛК, состоящего из РЛМ метрового и РЛМ дециметрового диапазона длин волн, со следующими обозначениями:
DMAXMM - максимальная дальность обнаружения воздушного объекта с ЭПР σ РЛМ метрового диапазона волн;
 - максимальная дальность обнаружения воздушного объекта с ЭПР σ РЛМ метрового диапазона волн при воздействии АШП;
- максимальная дальность обнаружения воздушного объекта с ЭПР σ РЛМ метрового диапазона волн при воздействии АШП;
DTPMM - область пространства, где обнаружение воздушных объектов с ЭПР σ в условиях воздействия АШП однопозиционным РЛМ метрового диапазона волн невозможно;
DMAXДМ - максимальная дальность обнаружения воздушного объекта с ЭПР σ РЛМ дециметрового диапазона волн;
 - максимальная дальность обнаружения воздушного объекта с ЭПР σ РЛМ дециметрового диапазона волн при воздействии АШП;
- максимальная дальность обнаружения воздушного объекта с ЭПР σ РЛМ дециметрового диапазона волн при воздействии АШП;
DTPДМ - область пространства, где обнаружение воздушных объектов с ЭПР σ в условиях воздействия АШП однопозиционным РЛМ дециметрового диапазона волн невозможно.
Так как процесс вычисления продольного размера является ресурсозатратным, то предлагается его реализовывать при распознавании наиболее приоритетных целей, или не распознающихся по другим признакам.
В случае применения противником интенсивного РЭП, как одного из наиболее значимых и относительно дешевых способов снижения эффективности системы радиолокационной разведки и системы ПВО в целом, существенно уменьшается дальность обнаружения ВКО и соответственно дальность и вероятность правильного распознавания класса этого объекта. В этом случае предлагается использовать совместную обработку информации, получаемую от разнесенных в пространстве РЛК, которые также могут быть многодиапазонные. Причем данные РЛК могут работать как в пассивном, так и в активном режимах, или взаимно переключаться из активного в пассивный режим работы по заранее заданной программе (по случайному или детерминированному закону).
При воздействии со стороны противника радиоэлектронного подавления для внешнего прикрытия, начинает использоваться информация от РЛМ, находящихся на других позициях. Для этого на восьмом этапе изначально определяется зона действия разнесенной радиолокационной системы, в пределах которой возможно вести радиолокационное наблюдение ВКО (В.С. Черняк. Многопозиционная радиолокация. М., Радио и связь, 1993, с. 59, выр. 3.2-3.3) [6]:


где:
РСР(β, ε) - средняя мощность, излучаемая передающей антенной РЛМ в направлении β, ε;
tобл(β, ε) - время облучения;
GПРД(β, ε) - коэффициент усиления передающей антенны;
GПРМ(β, ε) - коэффициент усиления приемной антенны;
σ - эффективная отражающая поверхность воздушного объекта;
λ - длина волны;
ν - коэффициент различимости;
Рш - мощность собственных шумов приемника;
Рп - мощность сигнала помехи;
KR - коэффициент, учитывающий затухание сигнала в атмосфере;
gpc4 - коэффициент, учитывающий влияние подстилающей поверхности на эхосигнал, отраженный от цели.
Область пространства (DTP), где обнаружение воздушных объектов в условиях воздействия АШП однопозиционным РЛМ невозможно, определяется выражениями:




Соответственно мощность уровня сигнала помехи на входе приемника РЛМ (Рп) и мощность собственных шумов приемника РЛМ (Рш) определяются следующим образом [9]:

где:
gnc2 - коэффициент, учитывающий влияние подстилающей поверхности на сигнал помехи;
РПАП - мощность передатчика помех;
GПАП - коэффициент усиления передающей антенны передатчика помех в направлении РЛМ;
DПАП - удаление передатчика помех от РЛМ

где:
k=1,38*10-23 Дж/град - постоянная Больцмана;
Т0=293 K - температура Кельвина;
Ш - коэффициент шума приемника;
ΔƒПРМ - ширина полосы пропускания приемного устройства РЛМ
Как видно из выражения коэффициента сжатия (Kсж), применение противником помехи мощностью, соизмеримой с мощностью собственных шумов приемника, снижает возможности однопозиционного РЛМ по дальности на 16 процентов, применение АШП большей мощности может значительно снизить дальность обнаружения и дальнейшего распознавания ВКО.
Таким образом, на девятом этапе, дальнейшее определение дальности, фазовых координат, госпринадлежности и РРК ВКО осуществляется при совместной обработке РЛИ, в пределах зоны действия МПРЛК. Причем распознавание может производиться на основании обработки сигналов как разнесенных длинноволновых РЛМ, так и разнесенных коротковолновых РЛМ, а также на основании обработки сигналов полученных длинноволновым РЛМ от коротковолнового РЛМ и наоборот. При такой реализации обработки сигналов появляются дополнительные признаки распознавания.
Известно, что использование дополнительного признака распознавания (расширение словаря признаков) при неизменном объеме алфавита классов приводит к увеличению вероятности правильного распознавания [1].
Сохранение максимальной дальности радиолокационной разведки (DMAX), повышение точности определения координат ВКО и вероятности его правильного распознавания обеспечивается при использовании в приемном пассивном РЛМ ФАР за счет формирования несколько веерообразно расположенных пространственных приемных каналов в направлениях, перекрывающих потерянную за счет РЭП дальность обнаружения активного РЛМ (DTP), и обработки информации из соответствующих дискрет дальности для каждого из сформированных каналов. Схема представлена на фиг. 3.
При ширине главного луча диаграмм направленности антенны  РЛК по половинной мощности около 1 градуса, размеры импульсного объема в азимутальной плоскости (δβ) и в угломестной плоскости (δε), соответствующие разрешающей способности РЛМ по угловым координатам, на дальности 100 км составляют 1750 м, на дальности 200 км - 3490 м, на дальности 300 км - 5230 м, что не позволяет однозначно производить селекцию целей и правильное РРК. В свою очередь, разрешающая способность по дальности (δd) при длительности импульса зондирующего сигнала 1 мкс составляет 150 м, и в настоящее время при обработке эхосигнала имеется возможность сократить длительность импульса и соответственно разрешающую способность по дальности до десятком метров. Таким образом, уменьшить импульсный объем V, изначально ограниченный разрешающими способностями по угловым координатам и дальности, возможно до VМП при использовании разрешающих способностей по дальности от двух разнесенных в пространстве РЛМ, объединенных в единый МПРЛК (Фиг. 4).
РЛК по половинной мощности около 1 градуса, размеры импульсного объема в азимутальной плоскости (δβ) и в угломестной плоскости (δε), соответствующие разрешающей способности РЛМ по угловым координатам, на дальности 100 км составляют 1750 м, на дальности 200 км - 3490 м, на дальности 300 км - 5230 м, что не позволяет однозначно производить селекцию целей и правильное РРК. В свою очередь, разрешающая способность по дальности (δd) при длительности импульса зондирующего сигнала 1 мкс составляет 150 м, и в настоящее время при обработке эхосигнала имеется возможность сократить длительность импульса и соответственно разрешающую способность по дальности до десятком метров. Таким образом, уменьшить импульсный объем V, изначально ограниченный разрешающими способностями по угловым координатам и дальности, возможно до VМП при использовании разрешающих способностей по дальности от двух разнесенных в пространстве РЛМ, объединенных в единый МПРЛК (Фиг. 4).


Так же одним из преимуществ предлагаемого технического решения является повышение скрытности радиолокационной системы в условиях радиолокационного конфликта за счет организации периодической смены варианта обзора пространства (переход из активного в пассивный режим работы) синхронно по случайному или детерминированному закону с целью сокращения продолжительности излучения конкретным РЛМ или РЛК.
Комплексирование в единый радиолокационный комплекс РЛК с разными диапазонами длин волн и адаптивное взаимодействие разнесенных в пространстве РЛМ позволяет также улучшить целый ряд основных параметров комплекса (расширить алфавит классов целей, увеличить достоверность распознавания, снизить вероятность перепутывания классов целей) и, тем самым, обеспечить более эффективное решение возлагаемых на РЛК задач.
В данном способе не происходит значительного усложнения системы, т.к. дополнение признаков распознавания, получаемых на основе обработки сигналов разного диапазона длин волн однопозиционного РЛК, и их дальнейшее использование в разнесенных в пространстве РЛК, оказывает влияние лишь на математическое обеспечение, реализованное на вычислителях, что в условиях современных вычислительных мощностей не является проблемой. При этом предлагаемый способ распознавания ВКО не требует использования сложного сверхширокополосного сигнала.
Основным условием реализации предлагаемого способа РРК является наличие цифровой ФАР на прием, позволяющей одновременно формировать в пространстве в азимутальной и угломестной плоскостях веерообразную диаграмму направленности, перекрывающую возможные диапазоны нахождения воздушных объектов, облучаемых активным РЛК, а также систему передачи информации от активного РЛК на пассивный РЛК МДРЛК о направлении и параметрах зондирования определенной области пространства. Активный РЛК (РЛМ) могут осуществлять как регулярный, так и адаптивный обзор пространства.
Предлагаемое техническое решение промышленно применимо, так как основано на известных достижениях радиоэлектронной техники и предназначено для обнаружения и радиолокационного распознавания классов воздушно-космических объектов в радиолокационных комплексах.
Источники информации
1. Селекция и распознавание на основе локационной информации / А.Л. Горелик, О.В. Кривошеев, С.С. Эпштейн; Под редакцией А.Л. Горелика. - М.: Радио и связь, 1990. - 240 с., ил.
2. Небабин В.Г., Сергеев В.В. Методы и техника радиолокационного распознавания. - М.: Радио и связь, 1984. - 152 с., ил.
3. Справочник по радиолокации / Под ред. М.И. Сколника. Пер с англ. Под общей ред. B.C. Вербы. В 2 книгах. Книга 1. Москва: Техносфера, 2014., - 672 с., ил. Книга 2. Москва: Техносфера, 2014., - 680 с., ил.
4. Патент РФ №2665032 С2, МПК G01S 13/52 «Устройство распознавания воздушно-космических объектов в двухдиапазонных радиолокационных комплексах с активными фазированными антенными решетками (АФАР)», опубл. 27.08.2018 г. (прототип).
5. В.Я. Аверьянов. Разнесенные радиолокационные станции и системы. Минск, «Наука и техника», 1978, с. 52-74.
6. Черняк B.C. Многопозиционная радиолокация. - М.: Радио и связь, 1993. - 416 с.: ил.
7. Патент РФ №2646847 С2, МПК G01S 13/02 «Способ обзора пространства радиолокационными станциями с фазированными антенными решетками», опубл. 12.03.2018 г. (аналог).
8. Сколник М.И. Справочник по радиолокации, Том 1. Москва, «Советское радио», 1976, стр. 356-395.
9. Ю.М. Перунов, К.И. Фомичев, Л.М. Юдин. Радиоэлектронное подавление информационных каналов систем управления оружием. М., «Радиотехника», 2003, с. 46.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОДИАПАЗОННЫЙ РАДИОЛОКАЦИОННЫЙ КОМПЛЕКС | 2007 |
|
RU2346291C2 |
| УСТРОЙСТВО РАСПОЗНАВАНИЯ ВОЗДУШНО-КОСМИЧЕСКИХ ОБЪЕКТОВ В ДВУХДИАПАЗОННЫХ РАДИОЛОКАЦИОННЫХ КОМПЛЕКСАХ С АКТИВНЫМИ ФАЗИРОВАННЫМИ АНТЕННЫМИ РЕШЕТКАМИ (АФАР) | 2016 |
|
RU2665032C2 |
| МОБИЛЬНАЯ ТРЕХКООРДИНАТНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 2014 |
|
RU2594285C2 |
| СПОСОБ ОБЗОРА ПРОСТРАНСТВА РАДИОЛОКАЦИОННЫМИ СТАНЦИЯМИ С ФАЗИРОВАННЫМИ АНТЕННЫМИ РЕШЕТКАМИ | 2012 |
|
RU2646847C2 |
| Способ обзора пространства и сопровождения трассы цели (варианты) и радиолокационный комплекс для его осуществления (варианты) | 2017 |
|
RU2673877C2 |
| Способ радиолокационного обзора пространства (варианты). | 2017 |
|
RU2667517C1 |
| Способ радиолокационного обзора пространства | 2017 |
|
RU2663883C1 |
| Способ сопровождения траектории излучающей или подсвечиваемой внешним радиоэлектронным средством цели (варианты) и радиолокационный комплекс для его осуществления (варианты) | 2017 |
|
RU2663226C1 |
| СПОСОБ ОБЗОРА ПРОСТРАНСТВА РАДИОЛОКАЦИОННОЙ СТАНЦИИ С ПРОГРАММНЫМ ОБЗОРОМ ПРИ ЕЕ КОМПЛЕКСНОМ ПРИМЕНЕНИИ С РАДИОЛОКАЦИОННЫМИ СТАНЦИЯМИ РЕГУЛЯРНОГО ОБЗОРА | 2024 |
|
RU2833509C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ РАДИОЛОКАЦИОННЫМ КОМПЛЕКСОМ | 2017 |
|
RU2677680C1 |


Изобретение относится к способам получения радиолокационной информации (РЛИ) о воздушно-космических объектах (ВКО) и может быть использовано для обнаружения и радиолокационного распознавания классов (РРК) ВКО в радиолокационных комплексах (РЛК) в составе радиолокационных модулей (РЛМ) разного диапазона длин волн с фазированными антенными решетками (ФАР), которые возможно объединить в бистатические РЛК для совместной обработки информации. Технический результат состоит в сохранении дальности обнаружения и повышении вероятностей правильного распознавания радиолокационных объектов. Для этого осуществляют комплексирования в единую радиолокационную систему РЛМ, работающих в разных диапазонах длин волн на совмещенной позиции, и РЛМ тех же диапазонов длин волн, находящихся на разнесенных позициях и использующих возможности переотраженной радиолокации. Причем данные РЛК могут работать как в пассивном, так и в активном режимах, или взаимно переключаться по заранее заданной программе (по случайному или детерминированному закону). Формируют нескольких веерообразно расположенных пространственных приемных каналов в направлении, перекрывающих потерянную за счет радиоэлектронного подавления дальность обнаружения активного РЛМ, и обработки информации из соответствующих дискрет дальности для каждого из сформированных каналов. 4 ил., 1 табл.
Способ радиолокационного распознавания классов воздушно-космических объектов (ВКО) для многодиапазонного разнесенного радиолокационного комплекса (РЖ) с фазированными антенными решетками (ФАР), в котором обработка радиолокационной информации (РЛИ) осуществляется путем начала процесса поиска, обнаружения и сопровождения ВКО в заданной области обзора, информация об обнаруженных радиолокационными модулями (РЛМ) метрового и дециметрового диапазона длин волн эхо-сигналах ВКО, содержащая дальность, азимут, угол места и амплитуду эхо-сигналов на каждой частоте зондирования, а также информация о госпринадлежности ВКО, поступает в блок обработки РЛК, в котором осуществляется дальнейший перерасчет координат в прямоугольную систему, определяется значение вертикальной составляющей скорости (VHi), вычисляется значение трассовой скорости ВКО (VTi), на основании полученных ранее вычислений осуществляется предварительное радиолокационное распознавание классов (РРК) ВКО по траекторным признакам, при этом происходит сопоставление информации о высоте ВКО, его вертикальной составляющей скорости и трассовой скорости с априорно заданной информацией о возможных значениях этих признаков для каждого класса цели, причем, если по траекторным признакам окончательное решение о принадлежности ВКО к определенному классу принять нельзя или вероятность такого распознавания недостаточна, то распознают по значениям эффективной поверхности рассеяния (ЭПР) ВКО, которые оцениваются на основе данных о дальности и угле места цели, амплитуде ее эхо-сигналов и априорной зависимости дальности цели с ЭПР, далее распознают по продольному размеру ВКО, который вычисляется на основе анализа амплитуд эхо-сигналов целей на каждой частоте РЛМ длинноволнового диапазона для предварительного определения размера ВКО, и точного определения размера РЛМ коротковолнового диапазона длин волн с активной ФАР, осуществляющим длительный контакт с целью в режиме остановленного на воздушном объекте луча и его распознавания с более высокой вероятностью, а в случае применения радиоэлектронного подавления (РЭП) и уменьшения максимальной дальности ведения радиолокационной разведки однопозиционным РЛК, использование многодиапазонных разнесенных в пространстве РЛК, которые могут работать как в пассивном, так и в активном режимах, или взаимно переключаться по заранее заданной программе, а распознавание может производиться на основании обработки сигналов как разнесенных длинноволновых РЛМ, так и разнесенных коротковолновых РЛМ, отличающийся тем, что осуществляют комплексирование РЛМ разного диапазона длин волн на совмещенной и разнесенных позициях в единую радиолокационную систему путем осуществления взаимной координатной привязки всех средств системы и совместную обработку РЛИ, получаемой каждым РЛМ, при этом, наличие цифровой активной ФАР, работающей на прием, позволяет одновременно формировать в пространстве в азимутальной и угломестной плоскостях веерообразную диаграмму направленности, перекрывающую возможные диапазоны нахождения воздушных объектов, облучаемых активным РЛК, позволяет за счет многопозиционности уменьшить импульсный объем, сохранить дальность обнаружения и дальность РРК ВКО в условиях РЭП активными шумовыми помехами, получить дополнительные признаки распознавания и повысить вероятность правильного РРК ВКО.
| СПОСОБ ОБЗОРА ПРОСТРАНСТВА РАДИОЛОКАЦИОННЫМИ СТАНЦИЯМИ С ФАЗИРОВАННЫМИ АНТЕННЫМИ РЕШЕТКАМИ | 2012 |
|
RU2646847C2 |
| УСТРОЙСТВО РАСПОЗНАВАНИЯ ВОЗДУШНО-КОСМИЧЕСКИХ ОБЪЕКТОВ В ДВУХДИАПАЗОННЫХ РАДИОЛОКАЦИОННЫХ КОМПЛЕКСАХ С АКТИВНЫМИ ФАЗИРОВАННЫМИ АНТЕННЫМИ РЕШЕТКАМИ (АФАР) | 2016 |
|
RU2665032C2 |
| УСТРОЙСТВО РАДИОЛОКАЦИОННОГО РАСПОЗНАВАНИЯ ВОЗДУШНО-КОСМИЧЕСКИХ ОБЪЕКТОВ | 2014 |
|
RU2570111C1 |
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |

