Изобретение относится к способам управления группой воздушных мишеней (ВМ) на основе беспилотных летательных аппаратов (далее БпЛА) и может быть использовано при разработке систем управления ВМ на основе БпЛА из состава универсального мишенно-тренировочного комплекса (УМТК).
В таком комплексе полет группы ВМ на основе БпЛА используется как при проверках и испытаниях всех типов зенитных комплексов войсковой противовоздушной обороны (ПВО), так и при проведении различного рода тренировок, учений и боевых стрельб личным составом расчетов боевых средств зенитных ракетных комплексов и систем (ЗРК и С), что в конечном итоге, позволяет повысить не только обученность расчетов, но и производительность ведения боевой работы.
Технический результат, который может быть получен от использования предлагаемого изобретения, заключается в обеспечении возможности управления группой ВМ на основе БпЛА с одного наземного пункта управления (НПУ) без изменения общего количества членов расчета НПУ, а также в отсутствии необходимости существенной аппаратной доработки как системы управления ВМ, так и аппаратуры НПУ, что позволит повысить имитационные возможности УМТК.
При имитации реальных действий группы средств воздушного нападения (СВН) группой ВМ на основе БпЛА из состава УМТК изобретение обеспечивает предотвращение столкновений ВМ друг с другом, возможность одновременного выполнения маневров, предусмотренных полетным заданием, а также сохранение возможности управления группой ВМ на основе БпЛА в случае потери любой ВМ из группы, при имитации маневров реальных СВН как в горизонтальной, так и вертикальной плоскостях.
Из известных систем группового применения БпЛА наиболее близким является способ управления группой беспилотных летательных аппаратов с учетом степени опасности окружающих объектов [1].
Сущность прототипа [1] заключается в том, что для каждого БпЛА в его инерциальной навигационной системе измеряют его текущую скорость, вычисляют направление его полета, с помощью датчиков измеряют угол визирования каждого потенциально опасного объекта, расстояние до него, скорость сближения с ним, угловую скорость линии визирования этого объекта, на основе этих измеренных и вычисленных значений вычисляют координаты и векторы скоростей каждого БпЛА и каждого объекта, определяют возможности поворота объекта на БпЛА для каждого БпЛА, формируют траекторию полета и значения сигнала управления каждым БпЛА, затем сформированные траекторию и сигнал управления передают в систему управления. Обеспечивается коррекция движения всех БпЛА для предотвращения возможных столкновений.
Технические особенности систем управления ВМ конкретных УМТК не позволяют использовать прототип без существенного изменения аппаратурной части ВМ и НПУ, так как:
в описании прототипа не приводится структура системы управления БпЛА, реализующая на практике предложенный алгоритм управления группой БпЛА с учетом ранжирования воздушных объектов (ВО) по степени их опасности;
представленный способ, применительно к отдельному БпЛА, предполагает рассмотрение каждого соседнего БпЛА как ВО, с которым существует угроза столкновения. При этом требуется оценка параметров его движения в возможную точку встречи, что при реализации способа в УМТК требует дополнительного контроля со стороны оператора НПУ или дооснащения каждой ВМ дорогостоящей бортовой радиолокационной станцией (РЛС);
рассмотрение и доказательство работоспособности способа приведено только для одной плоскости полета (горизонтальной), однако при использовании БпЛА в качестве ВМ необходим учет технических особенностей системы управления полетом при изменении высоты.
В связи с этим для управления группой ВМ из состава УМТК более целесообразным представляется использование одного из вариантов децентрализованного управления группой БпЛА в составе локальной сети [2, 3], позволяющего реализовать совместное функционирование систем управления ВМ на основе БпЛА, их полет по заданным траекториям и предотвращение столкновений между ними.
Для решения вышеперечисленных задач целесообразным является использование одной из разновидностей децентрализованного управления группой БпЛА [2, 3], а именно управление группой БпЛА с лидером, которое характеризуется рядом информационных связей и предполагает использование команд управления, формируемых лидером для всех ведомых БпЛА группы.
С этой целью предлагается использовать частный случай реализации закона управления группой БпЛА в виде [2, 3]

где  - обратная матрица соответствующих коэффициентов, определяющих величину сигналов управления;
- обратная матрица соответствующих коэффициентов, определяющих величину сигналов управления;
 - матрица эффективности управления;
- матрица эффективности управления;
Qi - матрица соответствующих коэффициентов штрафов за точность управления БпЛА-лидером группы;
 - разность ошибок управления БпЛА-лидером;
- разность ошибок управления БпЛА-лидером;
G j - матрица соответствующих коэффициентов штрафов за точность управления ведомыми БпЛА группы;
 - разность значений ошибок управления между объектами управления в группе (лидер - ведомые БпЛА).
- разность значений ошибок управления между объектами управления в группе (лидер - ведомые БпЛА).
Использование закона управление (1) обусловлено рядом его преимуществ, например, за счет учета ошибок  обеспечивается не только полет ВМ по требуемой траектории, но и предотвращение их столкновений.
обеспечивается не только полет ВМ по требуемой траектории, но и предотвращение их столкновений.
Таким образом, из (1) следует, что требуемая траектория полета для ВМ-лидера в группе может быть сформирована по закону

в котором не учитывается движение ведомых ВМ группы.
Для управления ведомыми ВМ необходимо обеспечить наличие информации об их текущем и требуемом положениях относительно ВМ-лидера, а также относительно друг друга. В этом случае закон управления для остальных ВМ группы должен быть представлен в виде

При синтезе закона управления группой ВМ на основе соотношений (2) и (3) учтены независимости каналов управления ВМ по курсу ψ и тангажу θ, и это позволяет выполнить построение соответствующей структуры системы управления группой ВМ только для одной, например горизонтальной плоскости. При этом для ее использования во втором канале управления необходимо учесть особенности формирования полетного задания (ПЗ) для всей группы мишеней с лидером [4], а также технические особенности штатной системы управления ВМ для вертикальной плоскости наведения.
Для осуществления полета ВМ-лидера использован так называемый пошаговый «процесс преследования» ВМ-лидером заданной точки траектории полета, пространственное положение которой определяется в соответствии с математическими зависимостями ПЗ.
В процессе полета ВМ-лидера в идеальном случае она должна проследовать в пространстве по всем точкам опорной траектории ПЗ. При этом модуль скорости сближения ВМ-лидера с каждой точкой ПЗ остается величиной постоянной.
Это позволяет использовать при синтезе управления группой ВМ метод пропорционально-дифференциального наведения ВМ-лидера на отдельные точки траектории ПЗ, предполагая линейным, закон сближения лидера с каждой точкой опорной траектории в виде
где r0 - расстояние от текущего положения ВМ-лидера до контрольной точки траектории в момент начала управления группой ВМ на соответствующем интервале опорной траектории;
 - составляющая скорости сближения ВМ-лидера с контрольной точкой ПЗ;
- составляющая скорости сближения ВМ-лидера с контрольной точкой ПЗ;
tKT - текущее время полета лидера группы ВМ с момента начала управления до момента достижения им контрольной точки опорной траектории.
После прохождения ВМ-лидером каждой контрольной точки ПЗ должны обновляться данные о r0, а отсчет времени tKT должен производиться от нее заново для получения нового значения составляющей наклонной дальности r до следующей контрольной точки траектории.
При этих условиях в качестве моделей изменения кинематического курсового угла  и горизонтальной составляющей угловой скорости вращения линии «ВМ - контрольная точка опорной траектории» ωГ при движении ВМ-лидера можно использовать уравнения вида
и горизонтальной составляющей угловой скорости вращения линии «ВМ - контрольная точка опорной траектории» ωГ при движении ВМ-лидера можно использовать уравнения вида


где  - требуемое управляющее ускорение ВМ-лидера в горизонтальной плоскости;
- требуемое управляющее ускорение ВМ-лидера в горизонтальной плоскости;
r - составляющая текущей дальности ВМ-лидера до контрольной точки опорной траектории ПЗ.
Для построения структуры системы управления группой мишеней ВМ-лидером необходимо выполнить преобразование дифференциальных уравнений (4) и (5) в их операторное представление с заменой символа дифференцирования на оператор преобразования Лапласа.
При этом (4) и (5) принимают вид


Подставляя (7) в (6), с осуществлением соответствующих преобразований, получено выражение для кинематического курсового угла ВМ-лидера в операторном представлении
Таким образом, в результате представленного выше обоснования предоставляется возможность определения передаточной функции кинематического уравнения движения ВМ-лидера по требуемой траектории ПЗ с учетом управляющего воздействия  для штатной системы управления ВМ на основе БпЛА самолетного типа в виде
для штатной системы управления ВМ на основе БпЛА самолетного типа в виде
Учитывая выражение (2) и результаты, описанные в [2, 3], получаем закон управления для ВМ-лидера в группе в дифференциальной форме

где qψi и qωi - коэффициенты «штрафов» за точность выдерживания ВМ-лидером требуемой траектории полета,
ki - коэффициент, определяющий значение сигнала управления.
Из уравнений (6) и (7) можно получить уравнение связи между угловой скоростью ωГ и курсовым углом ψГ

В соответствии с описанными результатами структурная схема, реализующая для системы управления ВМ-лидером закон управления в горизонтальной плоскости, показана на фиг.1.
Для вертикальной плоскости структурная схема будет иметь аналогичный вид, за исключением наличия дополнительного элемента, позволяющего осуществлять переход от угла тангажа θ к высоте h полета ВМ-лидера, которая представлена на фиг.2.
Схема отражает переход от  ПЗ к
ПЗ к  с учетом рассмотренных выше кинематических уравнений применительно к требуемому углу тангажа
с учетом рассмотренных выше кинематических уравнений применительно к требуемому углу тангажа  при управлении группой ВМ.
при управлении группой ВМ.
Для определения закона управления ведомыми ВМ на основе БпЛА в группе необходимо использовать (3), при этом данные из структуры системы управления ВМ-лидера используются для управления ведомыми ВМ в группе в соответствии с соотношением

где  - разность значений требуемых управляющих воздействий ВМ-лидера и ведомой ВМ по курсовому углу;
- разность значений требуемых управляющих воздействий ВМ-лидера и ведомой ВМ по курсовому углу;
 - разность значений управляющих воздействий с выхода схемы, реализующей формирование управления ВМ-лидера по курсовому углу и с выхода соответствующего контура системы управления ведомой ВМ.
- разность значений управляющих воздействий с выхода схемы, реализующей формирование управления ВМ-лидера по курсовому углу и с выхода соответствующего контура системы управления ведомой ВМ.
Таким образом, структурные схемы системы управления группой ВМ на основе БпЛА по курсу и высоте, в сочетании с неизменяемой штатной системой управления воздушных мишеней (показаны как контуры управления), имеют вид, представленный на фиг.3, 4.
Таким образом, структуру предложенного способа можно представить в виде, показанном на фиг.5.
Сущность способа заключается в следующей последовательности действий над группой ВМ на основе БпЛА:
На первом этапе способа осуществляется вывод операторами УМТК всех ВМ на основе БпЛА будущей группы в заданную область пространства, в которой предполагается переход к управлению всей группой ВМ с помощью ВМ-лидера.
Полетное задание в автопилот ВМ вводится заранее (на земле или в воздухе), используя соответствующий канал связи. При этом выполняется просчет выбранного ПЗ до первой контрольной точки с определением ее пространственных координат относительно пространственных координат ВМ-лидера xВМ1, yВМ1, zВМ1, также с определением: начальной наклонной дальности r0 ВМ-лидера, его углов курса  и тангажа
и тангажа  на момент начала управления группой ВМ.
на момент начала управления группой ВМ.
На втором этапе в системе координат OXYZ определяется текущее пространственное положение ведомых ВМ группы в прямоугольной системе координат (х2,…,n,y2,…,n,z2,…,n), их углы курса ψВМ2…n и тангажа θBM2,…,n на момент начала управления группой ВМ.
На третьем этапе определяются требуемые значения углов курса и тангажа  каждой ВМ группы, которые представляют собой соответствующие значения этих углов в направлении на контрольную точку и используются в качестве входных воздействий при отработке системой управления каждой ВМ направлений на контрольную точку траектории, пространственное положение которой определено ПЗ. В качестве начального условия для структуры системы управления ВМ-лидера принимается
каждой ВМ группы, которые представляют собой соответствующие значения этих углов в направлении на контрольную точку и используются в качестве входных воздействий при отработке системой управления каждой ВМ направлений на контрольную точку траектории, пространственное положение которой определено ПЗ. В качестве начального условия для структуры системы управления ВМ-лидера принимается 
На четвертом этапе для горизонтальной плоскости движения ВМ-лидера определяются результаты численного решения системы уравнений, представленных в операторном виде пунктирной частью структурной схемы фиг.3 в зависимости от времени tKT, при изменении которого с шагом Δt использован линейный закон изменения наклонной дальности ВМ-лидера до контрольной точки ПЗ. При этом на основе углового рассогласования между требуемым значением курсового угла ВМ-лидера при движении на контрольную точку ПЗ и его выходным значением на выходе системы управления группой ВМ формируется составляющая управляющего сигнала  по курсу для ВМ-лидера.
по курсу для ВМ-лидера.
Для обеспечения устойчивости сближении ВМ-лидера с контрольной точкой ПЗ значение управляющего сигнала  корректируется с учетом значения угловой скорости ωГ по изменению
корректируется с учетом значения угловой скорости ωГ по изменению  Аналогично для вертикальной плоскости движения ВМ-лидера определяются значения управляющего сигнала
Аналогично для вертикальной плоскости движения ВМ-лидера определяются значения управляющего сигнала  по результатам численного решения системы уравнений, представленных в операторном виде пунктирной частью структурной схемы, представленной на фиг.4.
по результатам численного решения системы уравнений, представленных в операторном виде пунктирной частью структурной схемы, представленной на фиг.4.
Управляющие сигналы  для соответствующих плоскостей наведения используются для определения требуемых углов курса
для соответствующих плоскостей наведения используются для определения требуемых углов курса  и тангажа
и тангажа  которые являются входными воздействиями для штатной неизменяемой системы управления ВМ-лидера в процессе его движения в направлении заданной контрольной точки ПЗ.
которые являются входными воздействиями для штатной неизменяемой системы управления ВМ-лидера в процессе его движения в направлении заданной контрольной точки ПЗ.
На пятом этапе текущие данные от управляющей структуры ВМ-лидера в виде  используются для определения в системах управления ведомых ВМ значений их угловых рассогласований
используются для определения в системах управления ведомых ВМ значений их угловых рассогласований  и
и  относительно ВМ-лидера. Этим обеспечивается полет ведомых ВМ с выдерживанием взаимных расстояний, исключающих столкновения ВМ в процессе движения всей группы к контрольной точке ПЗ.
относительно ВМ-лидера. Этим обеспечивается полет ведомых ВМ с выдерживанием взаимных расстояний, исключающих столкновения ВМ в процессе движения всей группы к контрольной точке ПЗ.
В системах управления ведомых ВМ по тангажу  аналогично системе управления ВМ-лидера, предусмотрен переход от угла тангажа
аналогично системе управления ВМ-лидера, предусмотрен переход от угла тангажа  к управлению по высоте
к управлению по высоте 
Шестой этап заключается в контроле значения r(tKT) текущей наклонной дальности ВМ-лидера до контрольной точки ПЗ. При достижении значения этой дальности заданного rmin, выбираемого из соображений сохранения работоспособности системы управления ВМ-лидера, производится переход к наведению группы ВМ на следующую контрольную точку ПЗ.
Определение пространственного положения каждой последующей контрольной точки ПЗ осуществляется за время наведения группы ВМ на текущую контрольную точку требуемой траектории движения при выполнении маневра, соответствующего заданному ПЗ.
Представленная последовательность действий определяет сущность предлагаемого способа управления группой маневренных беспилотных летательных аппаратов.
Дополнительно, следует отметить, что в случае потери ВМ-лидера, можно предусмотреть наличие в составе системы управления каждой ВМ схемы, реализующей закон управления всей группой ВМ, что соответствует передаче функций ВМ-лидера ближайшей к нему ВМ.
Это позволяет обеспечить сохранение конфигурации группы оставшихся ВМ на всем участке выполнения ПЗ.
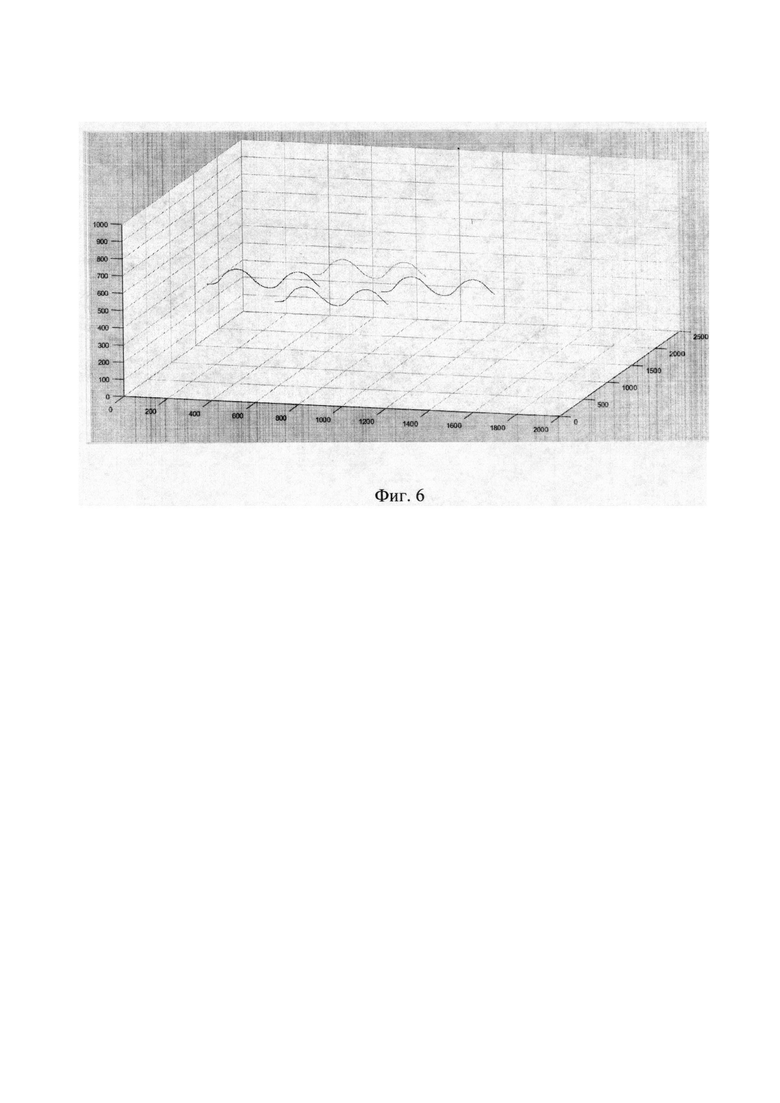
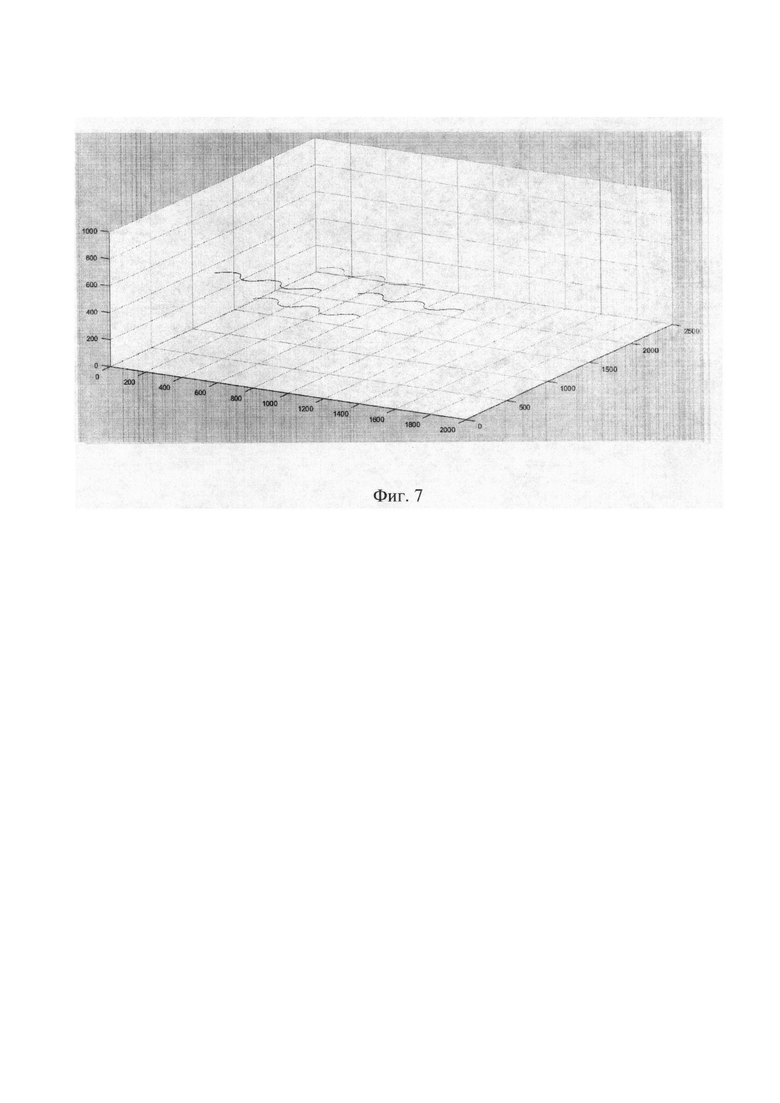
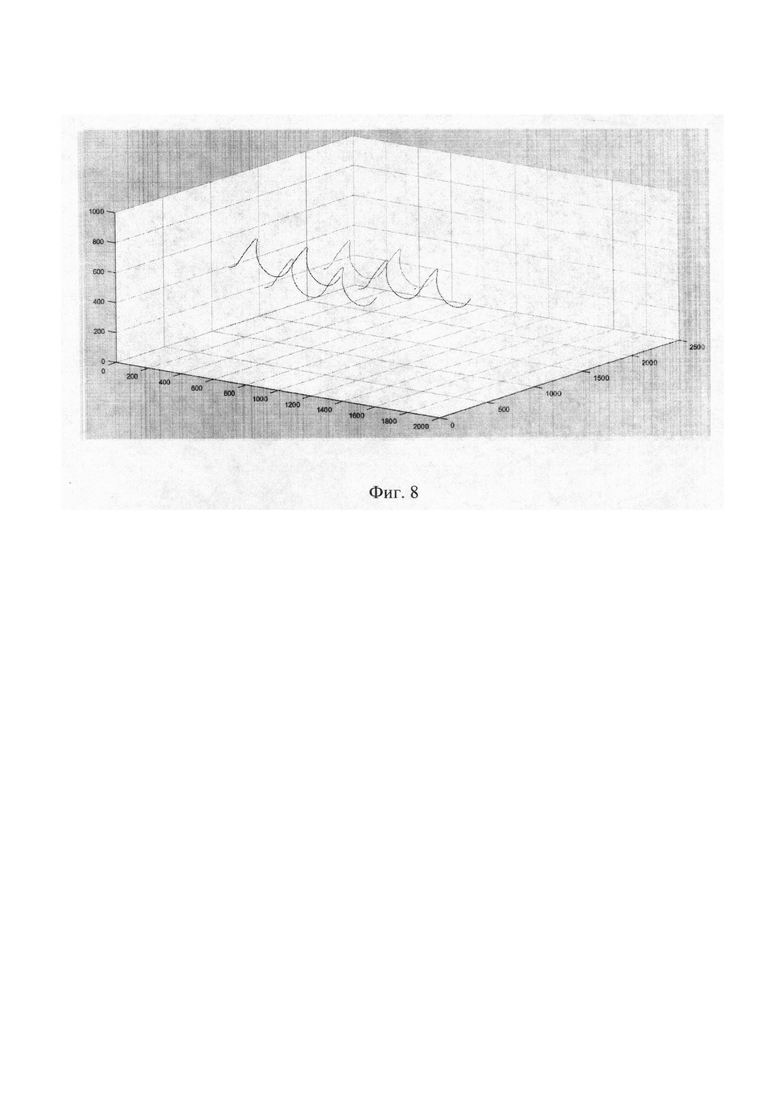
Результаты моделирования (фиг.6, 7, 8) с использованием имитационной модели [5] показывают, что в течение всего полета к контрольным точкам ПЗ траектории ВМ не пересекаются в группе, следовательно, способ управления обеспечивает их полет в составе группы без столкновения.
Это достигается за счет учета в законе управления группой для каждой из ВМ взаимного положения ВМ-лидер - ведомые ВМ.
Промышленная применимость предлагаемого технического решения подтверждается возможностью реализации его назначения с помощью стандартных бортовых вычислительных средств, без существенной доработки системы управления ВМ на основе БпЛА, так как в конечном итоге при реализации на практике необходима лишь дополнительная информация о движении ВМ на основе БпЛА относительно соответствующих контрольных точек требуемой траектории полета.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Изобретение к патенту RU 2728197 С1. «Способ управления группой беспилотных летательных аппаратов с учетом степени опасности окружающих объектов».
2. Верба B.C., Татарский Б.Г., Меркулов В.И. и др. «Комплексы с беспилотными летательными аппаратами». Москва. Радиотехника. 2016. 822 с.
3. Верба B.C., Татарский Б.Г., Меркулов В.И. и др. «Принципы построения и особенности применения комплексов с БЛА». М.: Радиотехника, 2016. 505 с.
4. Моисеев B.C. «Групповое применение беспилотных летательных аппаратов». - Казань: Редакционно-издательский центр «Школа», 2017. 572 с. (Серия «Современная прикладная математика и информатика»).
5. Заявка №2021114324/11 (030445). «Имитационная модель системы управления воздушной мишенью на основе беспилотного летательного аппарата из состава мишенного комплекса».
| название | год | авторы | номер документа |
|---|---|---|---|
| ИМИТАЦИОННАЯ МОДЕЛЬ СИСТЕМЫ УПРАВЛЕНИЯ ВОЗДУШНОЙ МИШЕНЬЮ НА ОСНОВЕ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА ИЗ СОСТАВА МИШЕННОГО КОМПЛЕКСА | 2020 |
|
RU2782035C2 |
| Способ коррекции бесплатформенной инерциальной навигационной системы беспилотного летательного аппарата малой дальности с использованием интеллектуальной системы геопространственной информации | 2019 |
|
RU2722599C1 |
| МОДЕЛИРУЮЩИЙ КОМПЛЕКС ДЛЯ ПРОВЕРКИ СИСТЕМЫ УПРАВЛЕНИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2432592C1 |
| Способ управления полетом беспилотного летательного аппарата и беспилотная авиационная система | 2019 |
|
RU2727416C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УСЛОВИЙ ВОЗМОЖНОГО ПУСКА БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2016 |
|
RU2618811C1 |
| Способ управления беспилотным планирующим летательным аппаратом на траекториях с изменениями направлений движения в заданных опорных точках | 2019 |
|
RU2708412C1 |
| СПОСОБ ФОРМИРОВАНИЯ МАЛОЗАМЕТНОЙ МОДУЛЬНОЙ БЕСПИЛОТНОЙ ЛЕТАТЕЛЬНОЙ СИСТЕМЫ | 2023 |
|
RU2829915C1 |
| Способ управления беспилотным планирующим летательным аппаратом | 2017 |
|
RU2654238C1 |
| СПОСОБ КОНЕЧНОГО ПРИВЕДЕНИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА В ПРОДОЛЬНОЙ ПЛОСКОСТИ НА ОСНОВЕ КВАЗИОПТИМАЛЬНОГО ЗАКОНА НАВЕДЕНИЯ | 2020 |
|
RU2737840C2 |
| Способ определения основных летных характеристик управляемых морских ракет | 2017 |
|
RU2687694C1 |
Изобретение относится к способам управления группой воздушных мишеней (ВМ) на основе беспилотных летательных аппаратов (БпЛА) и может быть использовано при разработке систем управления ВМ на основе БпЛА из состава универсального мишенно-тренировочного комплекса (УМТК). Способ заключается в том, что на первом этапе осуществляется вывод операторами УМТК всех воздушных мишеней на основе БпЛА будущей группы в заданную область пространства, в которой предполагается переход к управлению всей группой с помощью ВМ-лидера. Полетное задание (ПЗ) в автопилот ВМ вводится заранее. На втором этапе в системе координат OXYZ определяется текущее пространственное положение ведомых ВМ группы в прямоугольной системе координат. На третьем этапе определяются требуемые значения углов курса и тангажа каждой ВМ группы. На четвертом этапе для горизонтальной плоскости движения ВМ-лидера определяются результаты численного решения системы уравнений, представленных в операторном виде соответствующей схемой в зависимости от времени. Аналогично для вертикальной плоскости движения ВМ-лидера определяются значения управляющего сигнала по результатам численного решения системы уравнений, представленных в операторном виде соответствующей схемой. На пятом этапе текущие данные от управляющей структуры ВМ-лидера используются для определения в системах управления ведомых ВМ значений их угловых рассогласований относительно ВМ-лидера. В системах управления ведомых ВМ по тангажу аналогично системе управления ВМ-лидера предусмотрен переход от угла тангажа к управлению по высоте. Шестой этап заключается в контроле значения текущей наклонной дальности ВМ-лидера до контрольной точки ПЗ. Определение пространственного положения каждой последующей контрольной точки ПЗ осуществляется за время наведения группы ВМ на текущую контрольную точку требуемой траектории движения при выполнении маневра, соответствующего заданному ПЗ. Технический результат – обеспечение возможности управления группой ВМ на основе БпЛА с одного наземного пункта управления, что позволяет повысить имитационные возможности УМТК. 8 ил.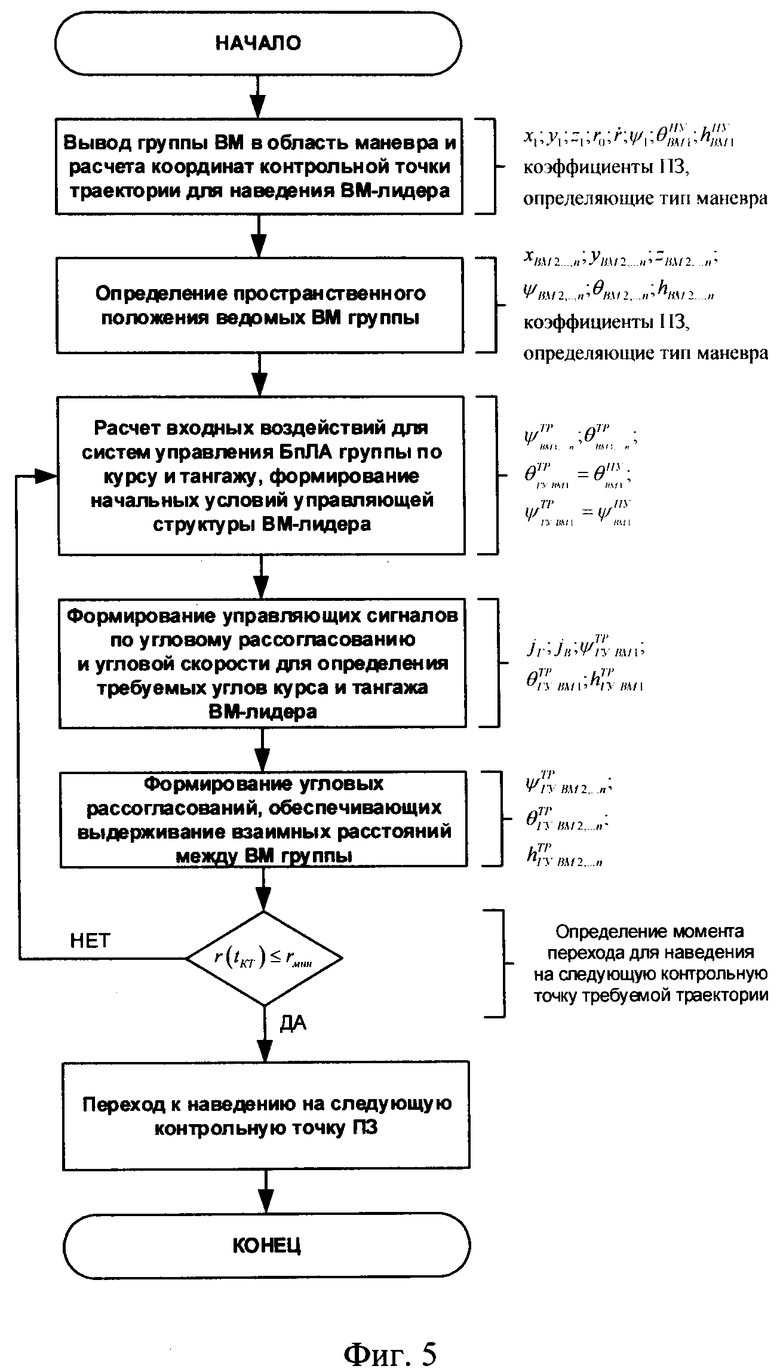
Способ управления группой маневренных беспилотных летательных аппаратов, заключающийся в том, что группа воздушных мишеней выводится в заданную область воздушного пространства при определении начальной наклонной дальности r0 до ВМ-лидера, ее углов курса  и тангажа
и тангажа  с одновременным определением текущего пространственного положения ведомых ВМ, их углов курса ψBM2,…,n и тангажа θBM2,…,n с последующим их сравнением с требуемыми значениями углов курса и тангажа
с одновременным определением текущего пространственного положения ведомых ВМ, их углов курса ψBM2,…,n и тангажа θBM2,…,n с последующим их сравнением с требуемыми значениями углов курса и тангажа  каждой ВМ группы, отличающийся тем, что в качестве начального условия на момент начала управления для системы управления ВМ-лидера принимаются равенства
каждой ВМ группы, отличающийся тем, что в качестве начального условия на момент начала управления для системы управления ВМ-лидера принимаются равенства  затем для горизонтальной плоскости движения ВМ-лидера в зависимости от времени tKT, при изменении которого с шагом Δt используется линейный закон изменения наклонной дальности, на основе углового рассогласования между требуемым значением курсового угла ВМ-лидера при движении на контрольную точку ПЗ и его выходным значением на выходе системы управления группой ВМ формируется составляющая управляющего сигнала jГ по курсу для ВМ-лидера при обеспечении устойчивости сближения ВМ-лидера с контрольной точкой ПЗ за счет коррекции управляющего сигнала jГ путем учета значения угловой скорости ωГ по изменению
затем для горизонтальной плоскости движения ВМ-лидера в зависимости от времени tKT, при изменении которого с шагом Δt используется линейный закон изменения наклонной дальности, на основе углового рассогласования между требуемым значением курсового угла ВМ-лидера при движении на контрольную точку ПЗ и его выходным значением на выходе системы управления группой ВМ формируется составляющая управляющего сигнала jГ по курсу для ВМ-лидера при обеспечении устойчивости сближения ВМ-лидера с контрольной точкой ПЗ за счет коррекции управляющего сигнала jГ путем учета значения угловой скорости ωГ по изменению  аналогично для вертикальной плоскости движения ВМ-лидера определяются значения управляющего сигнала jВ, управляющие сигналы jГ и jВ для соответствующих плоскостей наведения используются для определения требуемых углов курса
аналогично для вертикальной плоскости движения ВМ-лидера определяются значения управляющего сигнала jВ, управляющие сигналы jГ и jВ для соответствующих плоскостей наведения используются для определения требуемых углов курса  и тангажа
и тангажа  которые являются входными воздействиями для штатной неизменяемой системы управления ВМ-лидера в процессе его движения в направлении заданной контрольной точки ПЗ, текущие данные от управляющей структуры ВМ-лидера в виде
которые являются входными воздействиями для штатной неизменяемой системы управления ВМ-лидера в процессе его движения в направлении заданной контрольной точки ПЗ, текущие данные от управляющей структуры ВМ-лидера в виде  используются для определения в системах управления ведомых ВМ значений их угловых рассогласований
используются для определения в системах управления ведомых ВМ значений их угловых рассогласований  относительно ВМ-лидера, тем самым обеспечивая полет ведомых ВМ с выдерживанием взаимных расстояний, исключающих столкновения ВМ в процессе движения всей группы к контрольной точке ПЗ, в системах управления ведомых ВМ по тангажу
относительно ВМ-лидера, тем самым обеспечивая полет ведомых ВМ с выдерживанием взаимных расстояний, исключающих столкновения ВМ в процессе движения всей группы к контрольной точке ПЗ, в системах управления ведомых ВМ по тангажу  аналогично системе управления ВМ-лидера, осуществляется переход от угла тангажа
аналогично системе управления ВМ-лидера, осуществляется переход от угла тангажа  к управлению по высоте
к управлению по высоте  при достижении значения текущей наклонной дальности заданного rmin, выбираемого из соображений сохранения работоспособности системы управления ВМ-лидера, осуществляется переход к наведению группы ВМ на следующую контрольную точку ПЗ.
при достижении значения текущей наклонной дальности заданного rmin, выбираемого из соображений сохранения работоспособности системы управления ВМ-лидера, осуществляется переход к наведению группы ВМ на следующую контрольную точку ПЗ.
| Способ формирования пространственной крупногабаритной имитационно-мишенной обстановки | 2018 |
|
RU2685282C1 |
| Способ регенерирования сульфо-кислот, употребленных при гидролизе жиров | 1924 |
|
SU2021A1 |
| US 10586186 B2, 10.03.2020 | |||
| US 7047861 B2, 23.05.2006 | |||
| Способ регенерирования сульфо-кислот, употребленных при гидролизе жиров | 1924 |
|
SU2021A1 |

