Область техники, к которой относится изобретение
Изобретение относится к области автоматизации производственных процессов с использованием средств пневмоавтоматики и может быть использовано в различных отраслях промышленности и энергетики.
Уровень техники
Известен способ электропневматического дискретного преобразования, реализуемый предложенным устройством. Способ предусматривает дискретное управление питанием воздуха, сбросом воздуха в атмосферу и расходом на форсировку, сравнение выходного давления с номинальным, дифференцирование входного сигнала, включение подачи питания и отключение форсировки при несовпадении выходного давления с номинальным, включение сброса для приведения при необходимости выходного давления к атмосферному (Патент СССР 706582, 31.12.1979, F15C 3/00, G05B 11/44).
Данный способ используется для преобразования дискретных сигналов и не может работать с аналоговыми сигналами. Кроме того, схема построения преобразования не обеспечивает высокое быстродействие.
Известен также способ электропневматического преобразования, реализуемый устройством, содержащим электромагнит, мембранную головку, лежащую на мембране и имеющую соединенное с атмосферой верхнее выпускное седло клапана, закрывающее камеру выходного давления, и нижнее впускное седло клапана, закрывающее камеру давления питания. Способ предусматривает управление питанием воздуха в выходную линию и сбросом воздуха в атмосферу, сравнение выходного давления с требуемым при помощи мембраны с пружиной, осуществление механопневматического преобразования, учет температуры обмотки электромагнита (Патент РФ 2352974, 20.04.2009, G05D 16/00) (прототип).
Используемый в известном способе принцип преобразования предполагает непрерывный сброс воздуха, что приводит к значительному его расходу, а механопневматическое преобразование не обеспечивает достаточно высокое быстродействие.
Раскрытие изобретения
Цель изобретения - повышение быстродействия и снижение расхода воздуха. Указанная цель достигается тем, что, в отличие от известного технического решения, в предлагаемом способе преобразование реализуют в виде циклических действий при нормально закрытых подпитке воздуха в выходную линию и сбросе воздуха из этой линии в атмосферу, в конце каждого цикла измеряют с помощью АЦП фактическое давление в выходной линии и определяют значение ошибки преобразования и ее знак, в начале каждого цикла определяют ширину импульса управляющего сигнала пропорционально найденному в конце предыдущего цикла значению ошибки, после чего осуществляют выдачу одиночного широтно-импульсного управляющего сигнала на кратковременное открытие подпитки при положительном знаке ошибки или кратковременное открытие сброса при отрицательном знаке ошибки, причем коэффициенты пропорциональности в расчете ширины импульса корректируют в конце текущего цикла в зависимости от соотношения ошибки и разности фактических значений давления в текущем и предыдущем циклах.
Описание чертежей
Реализация и особенности предлагаемого способа иллюстрируются рисунками.
Фиг. 1. Структурная схема электро-пневмо преобразователя
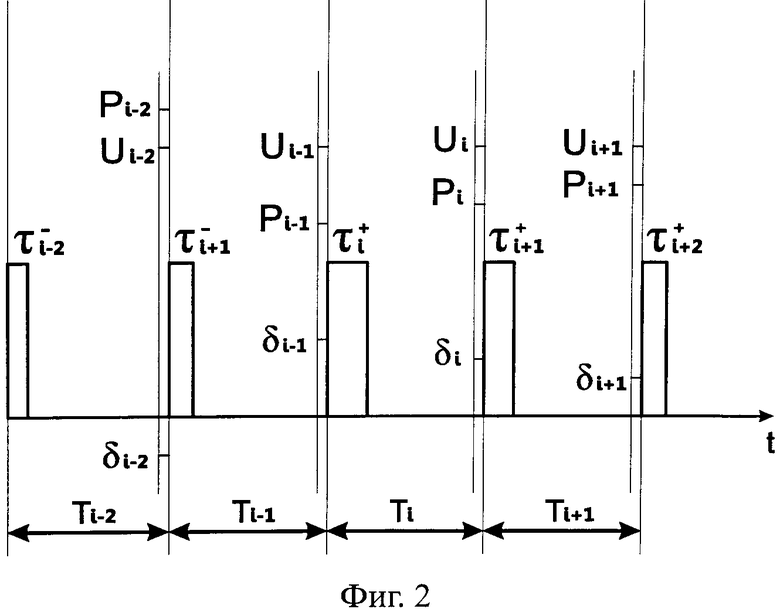
Фиг. 2. Циклограмма работы электро-пневмо преобразователя
Осуществление изобретения
Применение пневматических технических средств, в частности различных исполнительных механизмов, широко распространено в промышленности. Структурная схема электро-пневмо преобразователя, реализующая предлагаемый способ, представлена на фиг. 1. Преобразователь содержит тактовый генератор 1, аналого-цифровой преобразователь (АЦП) 2, датчик 3 давления в выходной линии, блок сравнения 4, вычислительный блок 5, клапан 6 подпитки воздуха в выходную линию, клапан 7 сброса воздуха в атмосферу, формирователь импульсов 8 и блок коррекции 9.
Циклограмма работы преобразователя показана на фиг. 2.
Преобразователь, реализующий предлагаемый способ, работает следующим образом.
Тактовый генератор 1 формирует последовательность циклов работы преобразователя с задаваемым периодом T. В зависимости от конструкции преобразователя период может быть постоянным или корректируемым и составлять ориентировочно от десятых долей секунды до нескольких секунд.
В конце каждого цикла (i - номер цикла):
- определяется значение входного электрического сигнала Ui и с помощью АЦП 2 измеряется фактическое значение давления Pi в выходной линии по сигналу от датчика 3;
- с помощью блока 4 определяется ошибка преобразования:

В начале каждого цикла выполняются следующие действия:
- с помощью блока 5 определяется длительность импульса управляющего сигнала в зависимости от значения ошибки в предыдущем цикле, с учетом ограничений по чувствительности δогр:
а) если δi-1>δогр, то

где Mi=(1+mPi-1)M0;
б) если δi-1< - δогр, то

где Ni=[1+n(100-Pi-1)]N0;
в) если - δогр≤δi-1≤δогр, то выдача сигнала на клапаны в i-м цикле не производится;
- с помощью блока 8 импульс управляющего сигнала выдается на соответствующий клапан.
Коэффициенты m, M0, n, N0 выбираются в зависимости от проходного сечения и быстродействия клапанов 6 и 7, конструкции пневматических каналов преобразователя, других требований к преобразователю.
В конце каждого цикла, после определения значения δi, с помощью блока 9 производится корректировка коэффициента Ri (если в этом цикле включался клапан 6) или Si (если включался клапан 7):
- Для коэффициента:

в) если условия (4) и (5) не выполняются, коррекция коэффициента Ri, в данном цикле не производится.
- Аналогично производится корректировка коэффициента Si.
Проведенные испытания предлагаемого способа показали его работоспособность и эффективность. В связи со значительной инерционностью пневматической техники дискретная реализация способа обеспечивает аналоговое преобразование при наличии на выходе небольшого сглаживающего объема, который обычно присутствует в виде пневмотрассы, входной полости клапана или пнемопозиционера, и т.п.
Используемый принцип реализации способа проявляется в повышении быстродействия, особенно при больших амплитудах изменения входного сигнала. Способ предполагает нулевой расход воздуха в установившемся состоянии, что обеспечивает очень низкий суммарный расход воздуха. Внедрение предлагаемого способа в серийно выпускаемых ЗАО «Экоресурс» контроллерах серии БАЗИС® намечено на 2014-2015 годы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления схватом манипулятора | 1988 |
|
SU1824299A1 |
| СПОСОБ КОНТРОЛЯ ОБЛЕДЕНЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2323131C1 |
| СОСТАВНОЙ БЫСТРОДЕЙСТВУЮЩИЙ АНАЛОГО-ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ | 2006 |
|
RU2311731C1 |
| СПОСОБ ИЗМЕРЕНИЯ ФИЗИЧЕСКОЙ ВЕЛИЧИНЫ | 2010 |
|
RU2436048C1 |
| ЭЛЕКТРОПНЕВМАТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2007 |
|
RU2352974C1 |
| СПОСОБ АНАЛОГО-ЦИФРОВОГО ПРЕОБРАЗОВАНИЯ ИЗМЕРИТЕЛЬНЫХ СИГНАЛОВ | 2009 |
|
RU2444125C2 |
| СПОСОБ УПРАВЛЕНИЯ МАШИНОЙ (ВАРИАНТЫ) | 2010 |
|
RU2489581C2 |
| Устройство для определения момента максимума сигналов акустической эмиссии | 1987 |
|
SU1469447A1 |
| Аналого-цифровой преобразователь | 1986 |
|
SU1410271A1 |
| СПОСОБ КОМПЕНСАЦИИ ВЫСШИХ ГАРМОНИК И КОРРЕКЦИИ КОЭФФИЦИЕНТА МОЩНОСТИ СЕТИ | 2008 |
|
RU2354025C1 |
Изобретение относится к области автоматизации производственных процессов с использованием средств пневмоавтоматики и может быть использовано в различных отраслях промышленности. Способ реализуется в виде циклических действий при нормально закрытых подпитке воздуха в выходную линию и сбросе воздуха из этой линии в атмосферу. В начале каждого цикла осуществляют выдачу одиночного широтно-импульсного управляющего сигнала на кратковременное открытие подпитки или сброса. Ширину импульса управляющего сигнала определяют пропорционально найденному в конце предыдущего цикла значению ошибки с адаптацией коэффициентов пропорциональности. В результате повышается быстродействие электро-пневмо преобразования, снижается расход воздуха. 2 ил.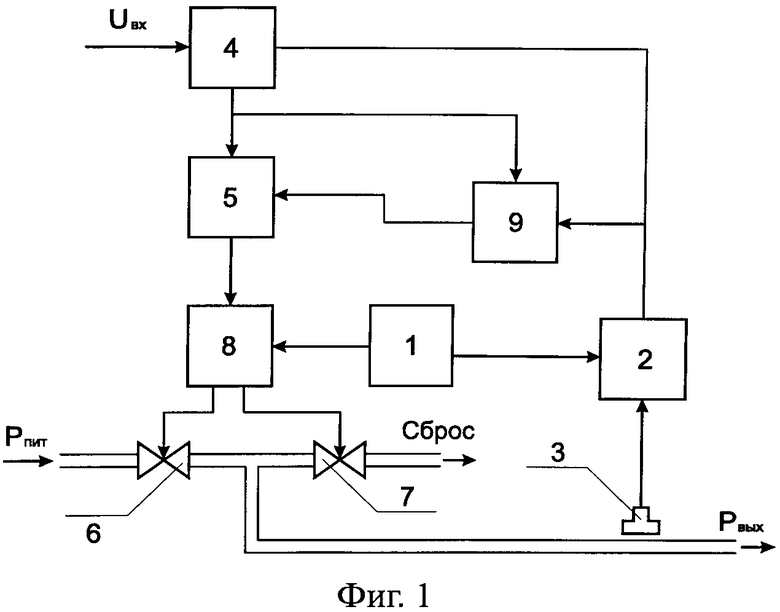
Способ электро-пневмо преобразования путем двухпозиционного управления «открыто/закрыто» подпиткой воздуха в выходную линию и сбросом воздуха из этой линии в атмосферу, определения ошибки преобразования вычитанием фактического давления в выходной линии из требуемого, отличающийся тем, что с целью повышения быстродействия и снижения расхода воздуха, преобразование реализуют в виде циклических действий при нормально закрытых подпитке и сбросе, в конце каждого цикла измеряют с помощью АЦП фактическое давление в выходной линии и определяют значение ошибки преобразования и ее знак, в начале каждого цикла определяют ширину импульса управляющего сигнала пропорционально найденному в конце предыдущего цикла значению ошибки, после чего осуществляют выдачу одиночного широтно-импульсного управляющего сигнала на кратковременное открытие подпитки при положительном знаке ошибки или кратковременное открытие сброса при отрицательном знаке ошибки, причем коэффициенты пропорциональности в расчете ширины импульса корректируют в конце текущего цикла в зависимости от соотношения ошибки и разности фактических значений давления в текущем и предыдущем циклах.
| ЭЛЕКТРОПНЕВМАТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2007 |
|
RU2352974C1 |
| УСТРОЙСТВО РЕГУЛИРОВАНИЯ ПАРАМЕТРОВ ГАЗОВОГО ПОТОКА | 2002 |
|
RU2216762C1 |
| ЭЛЕКТРОПНЕВЛ\АТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 0 |
|
SU292142A1 |
| JP 2005292911 A, 20.10.2005. | |||

