Изобретение относится к машиностроению, в частности к робототехнике и может быть использовано для автоматизации производственных процессов, связанных с захватом и транспортировкой различных изделий.
Цель изобретения - расширение функциональных возможностей за счет увеличения номенклатуры манипулируемых деталей, а также за счет расширения зоны работы.
Отличительными признаками заявляемого устройства являются: установление на одной из губок схвата механопневматиче- ского преобразователя с линейной выходной характеристикой, т.е. изменяющееся выходное давление преобразователя в процессе зажима объекта манипулирования связано линейной функциональной зависимостью с прикладываемым к нему усилием сжатия, наличие регулировки скорости движения губок схвата, обеспечивающее снижение динамических нагрузок, возникающих при зажиме объекта, а также пневматического регулятора с пропорционально-интегральным законом регулирования, позволяющим за счет введения в закон регулирования интегральной составляющей исключить статическую ошибку, возникающую после зажима объекта, что способствует расширение номенклатуры захватываемых объектов за счет повышения надежности захвата и транспортировки легкодеформируемых объектов по сравнению с прототипом.
Устройство позволяет автоматизировать процесс захвата и транспортировки различных деталей за счет улучшения динамических характеристик, связанных с процессом зажима и разжима объекта манипулирования. При этом расширяются функциональные возможности устройства за счет расширения зоны работы, а также упрощаются конструкции известных захватных устройств, предназначенных для работы в условиях агрессивной среды.
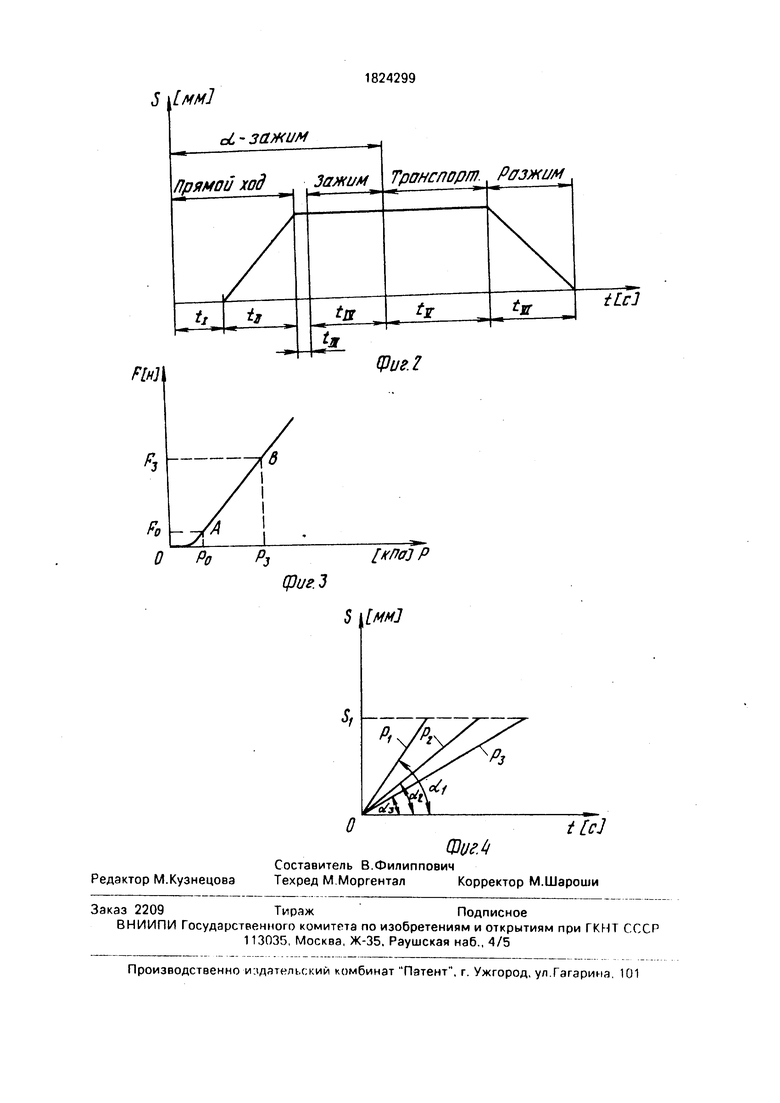
На фиг. 1 представлена функциональная схем устройства; на фиг.2 - циклограмма работы устройства; на фиг.З - выходная статическая характеристика захватного устройства с установленным на нем датчиком усилия сжатия, отражающая изменение сиСП
С
с ю
4 ГО
о чэ
лы сжатия при зажиме обьекта в зависимости от давления, подаваемого в пневмоци- линдр схвата, т.е. F f(P); на фиг.4 - функциональная зависимость изменения скорости движения губок схвата до момента контакта их с объектом (точка Si) от подаваемого в рабочую полость пневмоцилиндра давления.
Устройство содержит по крайней мере один механопневматический преобразователь усилия сжатия 1, губки схвата 2, кинематически связанные с пневматическим приводом, состоящим из рабочей полости пневмоцилиндра 3, в которую подается сжа- тый воздух, поршня 4, не рабочей полости 5, связанной с атмосферой, в которой установлены возвратные пружины 6 и корпуса пневмоцилиндра 7, блок сравнения 8, первый вход которого соединен с выходом механоп- невматического преобразователя, а второй через манометр 9 подключен к выходу первого задатчика управления 10, включенного через дроссель 11 к линии питания, пневматический триггер 12, который выполнен на логических элементах И-НЕ, первый вход которого соединен с выходом блока сравнения, пневмокнопку 13, которая в нажатом состоянии выдает на выходе сигнал нулевого уровня, т.е. атмосферное давление, при этом выход ее соединения с первым входом логического элемента ИЛИ-НЕ 14, ко второму входу которого подключен выход элемента НЕ 15, вход которого соединен с выходом первого обратного клапана 16, а вход последнего подключен к выходу пневмопривода, блок управления 17, выход которого соединен со входом воздухораспределителя 18, а выход последнего подключен к выходу первого обратного клапана и к входу редукционного клапана 19, выход которого через манометр 20 соединен со входом переменного дросселя, второй задатчик управления 21, включенный через дроссель 22 к линии питания, при этом его выход через манометр 23 соединен со вторым управляемым пневмоклапаном 24, выход которого подключен ко второму входу пневматического регулятора 25, первый вход которого через первый пневмоклапан 26 соединен с выходом механопневматического преобразователя, а выход регулятора через второй обратный клапан 27 соединен со входом привода, при этом управляющие входы первого и второго пневмоклапана соединены с прямым выходом триггера, при этом выход третьего обратного клапана 28 соединен GO входом привода, а вход подключен к выходу третьего управляемого пневмоклапанэ 29, вход которого связан с выходом редукционного клапана, при этом управляющий вход
третьего пневмоклапана соединен с инверсным выходом триггера, объект манипулирования 31.
Циклограмма работы устройства (фиг.2)
состоит из следующих этапов: подготовительного ti, определяемого моментом открытия воздухораспределителя 18 при подаче команды а - зажим схвата с блока управления 17 до начала движения поршня
схвата 4, прямого хода поршня tii до момента касания губок схвата объекта манипулирования, времени переключения логической схемы tin, зажима объекта tiv. транспортировки tv, разжима tvi.
5 На фиг. 3 представлена статическая характеристика пневматического захватного устройства при зажиме объекта манипулирования, которая соответствует этапу tiv, показанному на циклограмме (фиг.2). Точка
0 А на характеристике соответствует минимальная величина сжатия, определяемая чувствительностью механопневматического преобразователя 1 при контакте объекта с очувствлеиной губкой схвата, а точка В со5 ответствует линейное нарастание дозируемого усилия до заданного значения.
На фиг.4 представлен закон изменения движения губок схвата при зажиме до контакта их с объектом (точка Si), при этом
0 скорость определяется углом наклона а этих характеристик в функции подаваемого давления, которое устанавливается дросселем 30, т.е. при увеличении давления PI P2 Рз возрастает и скорость движе5 ция губок схвата.
Устройство управления схватом манипулятора работает следующим образом. В исходном состоянии схват разжат под действием возвратных пружин 6 и поршень 4
0
занимает крайнее правое положение
(фиг.1). Перед началом работы оператор на устройство управления подает пневматическое питание, а по манометру 9 с помощью задатчика управления 10 устанавливает
5 давление Ро (фиг.З), соответствующее пороговому значению срабатывания механопневматического преобразователя в момент касания губок схвата захватываемого объекта манипулирования. При этом на выходе
0 блока сравнения 8 и на выходе S триггера 12 установится пневматический сигнал единичного уровня Г, соответствующий подаче давления сжатого воздуха, а при нажатии оператором пневмокнопки 13 на выходе ло5 гического элемента ИЛИ-НЕ 14 будет сигнал нулевого уровня, который установит триггер 12 а исходное состояние, при котором на прямом выходе Q будет 0, а на инверсном Q будет 1, который включит
управляемый нормально открытый пнев- моклапан 29, а пневмоклапана 26 и 24 будут закрыты, т.к. они управляются также как и клапан 29 сигналами единичного уровня. Затем с помощью переменного дросселя 30 оператор устанавливает необходимую скорость перемещения губок охвата, которая исключает динамические нагрузки, возникающие в момент контакта губок схвата с объектом манипулирования 31, а на втором задатчике управления 21 по манометру 23 устанавливает необходимую силу сжатия Рз (см.фиг.3), соответствующую физико-механическим свойствам объекта и достаточную для надежного удержания объекта в процессе его транспортировки.
Блок управления работы 17 подает команду а-зажим на воздухораспределитель 18, один из входов которого связан с трубопроводом, по которому подается сжатый воздух, другой вход - с атмосферой. Управление этими входами осуществляется электромагнитом воздухораспределителя. При подаче команды а воздух из магистрали подается в редукционный клапан 19, который служит для поддержания постоянства давления в систем Рп контроль которого осущ- ствляется по манометру 20. Это давление через редукционный клапан 19, переменный дроссель 30, нормально замкнутый контакт пневмоклапана 29 и обратный клапан 28 подается в рабочую полость пневмоци- линдра 3 и при соответствующем его росте начинается движение поршня 4, а следовательно и движение губок схвата с заданной скоростью до момента контакта их с захватываемым объектом 31 (фиг.1, 2, 4). После контакта с объектом поршень останавливается и механопневматический преобразователь 1 на второй вход блока сравнения 8 подает текущее давление Рт. При превышении текущего давления Р0, т.е. при Рт Ро срабатывает блок сравнения и на его выходе будет сигнал нулевого уровня, который будет также и на входе S триггера 12, а на входе R будет сигнал 1. Сигнал нулевого уровня переключит триггер в новое устойчивое положение, при котором на прямом выходе Q уже будет сигнал 1, а на инверсном Q будет 0. Сиг нал 1 с выхода триггера включает управляемые пневмоклапана 26 и 24, а инверсный выход триггера Q выключит управляемый пневмоклапан 29, т.е. вход привода перемещения губок схвата будет подключен к выходу пропорционально-интегрального регулятора 25, при этом задающее давление Рз через пневмоклапан 24 подается на второй вход регулятора, а текущее давление Рт. формируемое преобразователем 1 через первый пневмоклапан 26 подается ,ла первый вход регулятора. При зажиме объекта манипулирования 31 регулятор 2S формирует на выходе регулирующее воздействие Рвых. согласно заданному закону, который осуществляет дозированную подачу сжатого воздуха в рабочую полость пневмоцилиндра 3, наличие интегральной составляющей в законе управления силой сжатия исключает статическую ошибку, тем самым повышает точность дозирования сжатого воздуха при установлении заданной силы сжатия объекта манипулирования 31. При сравнении двух
5 значений давлений заданного Рз и текущего Рт пневматический регулятор перестает вырабатывать регулирующее воздействие и усилие зажима определяется значением РЗ. В процессе транспортировки объекта мани0 пулирования в заданную точку пространства регулятор автоматически поддерживает заданное усилие зажима, т.е. стабилизирует его.
После транспортировки объекта мани5 пулирования с блока управления робота 17 поступает команда Д- разжим, при этом воздухораспределитель 18 отключает вход подачи сжатого воздуха из магистрали и подключает его к атмосфере. Сжатый воздух
0 из рабочей полости пневмоцилиндра 3 под действием возвратных пружин 6 через обратный клапан 16 и воздухораспределитель сбрасывается в атмосферу. При обратном ходе поршня губки схвата отходят от зажа5 того объекта 31 (фиг.1), при этом текущее давление Рт, подаваемое с выхода механоп- невматического преобразователя 1,спадает до нулевого значения, в результате этого блок сравнения 8 переключается в исходное
0 состояние, при котором на его выходе, а также на входе триггера S будет сигнал единичного уровня, а на входе R сигнал нулевого уровня, который сформируется после сброса сжатого воздуха при разжиме схва5 Та, т.к. сработает элемент НЕ 15 и на его выходе будет сигнал единичного уровня, который через логический элемент ИЛИ-Н Е 14 сформирует сигнал нулевого уровня, который и переключит триггер 12 в исходное
0 состояние, при котором на прямом выходе будет сигнал нулевого уровня, а на инверсном сигнал единичного уровня, который включит пневмоклапан 29. В результате этого устройство придет в исходное состояние,
5 при котором оно снова готово к повторению следующего цикла (фиг.2).
Таким образом, использование в данном устройстве контура управления скоростью движения губок захвата, контура регулирования усилием зажима расширяет
функциональные возможности при захвате объектов манипулирования, а также расширяется зона работы за счет работы в агрес- сивных средах, а наличие обратного клапане при сбросе воздуха в атмосферу увеличивает быстродействие, связанное с процессом разжима объекта манипулирования, что повышает производительность работы пневматических захватных устройств. Применение данного устройства управления упрощает также конструкцию известных очувствленных схватов, которые решают ту же задачу при работе в агрессивных средах.
Формула изобретения Устройство управления схватом манипулятора, содержащее привод, кинематически связанный с губками схвата, блок сравнения, по крайней мере один датчик усилия сжатия, установленный на губке схвата, блок управления, выход которого соединен с входом пневмопривода, отличающееся тем, что, с целью расширения функциональных возможностей за счет увеличения номенклатуры манипулируемых деталей, а также за счет расширения зоны работы, оно снабжено пневмоклапанами, манометром, задатчиками управления, триггером, элементом ИЛЙ-НЕ, пнев- мокнопкой, элементом НЕ, обратными клапанами, воздухораспределителем, редукционным клапаном, переменным дросселем, ПИ-регулятором. при этом выход
блока управления соединен с пневмоприводом посредством воздухораспределителя, а датчик усилия сжатия выполнен в виде ме- ханопневматического преобразователя с
линейной выходной характеристикой, выход которого соединен с входом первого пневмоклапана и первым входом блока сравнения, второй вход которого через манометр подключен к выходу первого задатчика управления, а выход блока сравнения соединен с первым входом триггера, второй вход которого подключен к выходу элемента ИЛИ-НЕ, первый вход которого соединен с пневмокнопкой, а второй - с выходом элемента НЕ, вход которого подключен к выходу первого обратного клапана, который соединен также с выходом воздухораспределителя и с входом редукционного клапана, выход которого через манометр,
переменный дроссель, третий пневмокла- пан и третий обратный клапан подключен к входу привода, при этом управляющий вход пневмоклапанэ соединен с инверсным выходом триггера, а выход второго задатчика
управления через манометр, второй клапан соединен с вторым входом ПИ-регулятора, первый вход которого соединен с выходом первого пневмоклапана, при этом выход ПИ-регулятора через второй обратный клапан подключен к входу привода, а управляющие входы первого и второго пневмоклапановсоединены с прямым выходом триггера.
J 1мм1



| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления схватом манипулятора | 1985 |
|
SU1337250A1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ АППАРАТОВ ПНЕВМАТИЧЕСКОГО ТОРМОЗНОГО ПРИВОДА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2139506C1 |
| Адаптивный схват промышленного робота | 1979 |
|
SU872255A1 |
| Способ дозирования жидкости и устройство для его осуществления | 1985 |
|
SU1435945A1 |
| Устройство для управления схватом манипулятора | 1989 |
|
SU1754439A1 |
| Управляющее устройство | 1980 |
|
SU959039A1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ И РЕГУЛИРОВАНИЯ РЕГУЛЯТОРОВ ТОРМОЗНЫХ СИЛ АВТОМОБИЛЕЙ С ПНЕВМАТИЧЕСКИМ ПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2278362C1 |
| ПНЕВМАТИЧЕСКИЙ ДОЗАТОР С ОТМЕРИВАНИЕМ ДОЗЫ ПО УРОВНЮ ЖИДКОСТИ В ТАРЕ | 2020 |
|
RU2754139C1 |
| ПНЕВМАТИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ МУФТОЙ КРИВОШИПНОГО ГОРЯЧЕШТАМПОВОЧНОГО ПРЕССА | 2002 |
|
RU2239562C2 |
| Адаптивный захватный модуль промышленного робота | 1989 |
|
SU1689063A1 |

Использование: при автоматизации производственных процессов, связанных с захватом и транспортировкой различных объектов манипулирования, находящихся в условиях агрессивной среды. Сущность изобретения: в устройство управления введены автономный контур регулирования скоростью движения губок захватного устройства, а также контур регулирования усилия сжатия. 4 ил.
pj7r
0 Po
Сриг.З
Ж
ttcJ
кПоЗ Р
S
0
| Робототехника | |||
| Экспресс-информация, 1988, №42, с | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Печь для сжигания твердых и жидких нечистот | 1920 |
|
SU17A1 |
