Изобретение относится к измерительной технике и может быть использовано в измерительных, сигнальных, регулирующих или управляющих системах, использующих в качестве чувствительных элементов датчиков физической величины резисторы, изменяющие свое активное сопротивление при изменении контролируемой физической величины, например в системах контроля, управления и безопасности грузоподъемных кранов.
Известен способ измерения физической величины, включающий преобразование ее в электрический аналоговый сигнал с помощью электрического моста, преобразование аналогового сигнала в цифровой сигнал и преобразование цифрового сигнала в последовательный код с передачей результатов измерения в регистрирующую аппаратуру по проводной линии связи (RU 53774 U1, 27.05.2006). Недостатком такого способа является сложность передачи сигналов в регистрирующую аппаратуру при установке датчиков, реализующих данный способ, на подвижных элементах конструкции, например на выдвижной секции стрелы грузоподъемного крана или на его поворотной платформе, так как при этом необходимо применение вращающихся токосъемных устройств и специальных кабелей.
Известны также способы измерения физической величины, включающие преобразование ее в электрический аналоговый сигнал, преобразование аналогового сигнала в цифровой сигнал и преобразование цифрового сигнала в последовательный код с передачей результатов измерения в пункт приема по проводной мультиплексной линии связи (RU 2232709 С2, 20.07.2004) или по беспроводной линии связи (RU 2251524 С2, 10.05.2005).
Однако данные способы измерения физической величины предусматривают передачу результатов измерений в пункт приема только по проводной или беспроводной линии связи, что ограничивает область их применения, так как протоколы передачи данных по проводным и по беспроводным линиям связи имеют совершенно разную структуру, кодировку и методы контроля правильности обмена информацией и способы обеспечения помехозащищенности, обусловленные именно особенностями среды передачи сигнала.
Наиболее близким к заявленному способу измерения физической величины по совокупности существенных признаков является способ, включающий преобразование контролируемой физической величины в цифровой сигнал с последующей индикацией результатов измерения или передачей в пункт приема информации по беспроводной линии связи (RU 69990 U1, 10.01.2008). Данный способ, включающий в себя предварительное преобразование контролируемой физической величины, в частности усилия на грузозахватном органе грузоподъемного крана, в аналоговый сигнал с помощью электрического моста (моста Уитстона), обладает рядом недостатков, обусловленных особенностями моста Уитстона:
по причине очень малого изменения сопротивления тензорезисторов при нагружении датчика усилия, реализующего данный способ, и малого значения напряжения на выходе тензомоста, приблизительно 9-10 бит разрешения аналого-цифрового преобразователя (АЦП) теряются. Поэтому для получения на выходе датчика цифрового сигнала требуемой точности (0,1-0,5%) требуется использование высококачественного АЦП с разрешением не менее 21 бит и помехозащищенного инструментального усилителя с повышенными требованиями к топологии печатной платы, размещению и монтажу элементов на печатной плате. Но работать с сигналами в диапазоне нескольких десятков нановольт крайне трудно: на результат накладываются всевозможные посторонние электромагнитные излучения, колебания температуры, микровибрации датчиков, нелинейность шкалы тензорезисторов и помехи, возникающие на плате в моменты переключения окружающей логики. Кроме того, высокоточные АЦП очень нестабильны при высоких частотах преобразования (≈1 кГц и выше);
зависимостью точности измерений от точности поддержания уровня напряжения питания моста Уитстона. При использовании классического моста Уитстона существует прямая зависимость точности измерений от точности поддержания уровня напряжения питания моста. Для работы классического моста Уитстона необходим высокостабильный источник питания с заранее заданным и известным уровнем выходного напряжения и очень жесткими требованиями к точности поддержания уровня выходного напряжения. Напряжение автономного источника питания (батарейки) по мере его эксплуатации снижается. При снижении напряжения до значения ниже определенной величины стабилизатор напряжения питания моста не сможет обеспечить заданный уровень, поэтому выходной сигнал с моста будет содержать неконтролируемую и неисправимую ошибку. Кроме того, как показывают осциллограммы напряжений цепей питания датчика и его отдельных узлов, в моменты включения приемопередающего модуля датчика (радиомодема) в режим передачи происходит кратковременное, но резкое снижение напряжения питания не только автономного источника питания, но и вторичных цепей питания узлов датчика, в том числе и тензомоста. Результатом такого «провала» напряжения также является неконтролируемая и неисправимая ошибка выходного сигнала с тензомоста. Никакие разумные емкости и фильтры в цепях питания не позволяют избавиться от таких «провалов» в силу наличия внутреннего сопротивления источника питания;
зависимостью уровня выходного сигнала классического моста Уитстона от температуры, при которой происходит измерение. При изменении температуры происходит разбалансировка моста. Известны способы аппаратной температурной компенсации, но они в большинстве случаев не дают желаемого результата в широком диапазоне рабочих температур промышленного оборудования (от -40 до +55°С). При наличии в составе датчика микроконтроллера наилучшие результаты, в частности для цифрового датчика, дает определение и запоминание в памяти микроконтроллера поправочных температурных коэффициентов. Определение таких коэффициентов - длительная, трудоемкая и недешевая процедура, которая выполняется индивидуально для каждого экземпляра датчика;
повышенным энергопотреблением, вызванным в основном недопустимо большим (для автономных источников питания, таких как батарейки, аккумуляторы, солнечные элементы) расходом электроэнергии на питание моста Уитстона, что резко ограничивает и даже делает невозможным длительное (месяц, квартал, полугодие и т.д.) функционирование автономного устройства для осуществления данного способа (датчика физической величины). Сопротивление классического моста Уитстона при использовании распространенных тензорезисторов лежит в пределах 350-1000 Ом. Тензочувствительность большинства существующих тензометрических мостов лежит в пределах 1-2 мВ/В. Для получения приемлемых значений выходного сигнала тензомоста Уитстона (10-20 мВ) напряжение, подводимое к мосту, должно составлять не менее 10-15 В. При этом ток, потребляемый непосредственно мостом, будет лежать в пределах 10-60 мА. Марганцевощелочные АА-элементы имеют емкость около 3,2 А/ч. Если из восьми таких элементов собрать батарею напряжением 12 В, то только для питания моста ее емкости хватит не более чем на 90-300 часов непрерывной работы, т.е. на 3-12 суток. Но кроме моста необходимо питание электронных компонентов датчика (инструментального усилителя, микропроцессора и радиомодема), в результате чего время функционирования автономного датчика с одним комплектом батареек станет еще меньше. Это приводит к необходимости использования в датчике источника питания повышенной емкости для обеспечения необходимого ресурса без замены гальванических элементов, так как в ряде случаев их замена крайне сложна, в частности на грузоподъемных кранах с выдвигаемым или поворотным оборудованием. Увеличение емкости источника питания влечет за собой увеличение массы, габаритов и стоимости. Попытки снизить энергопотребление моста Уитстона путем подачи напряжения на диагональ питания периодически, кратковременными импульсами на короткое время измерения оказываются безуспешными, так как при подаче питания 10-12 В на тензорезисторы моста в течение некоторого времени (1-5 с) они разогреваются, а в процессе разогрева изменятся не только значения их сопротивлений, но и тензочувствительность. Проведение измерений в это время некорректно и приводит к дополнительным ошибкам. Уменьшить напряжение с целью уменьшения степени разогрева тензорезисторов при использовании классического способа и моста Уитстона нельзя, так как это приведет к уменьшению уровня выходного сигнала, который и без того очень маленький и имеет уровень в единицы милливольт;
в случае выхода моста Уитстона из строя необходимо переключение на резервный мост (если он есть), а это сама по себе непростая задача - коммутация очень слабых сигналов; кроме того, после такого переключения требуется калибровка датчика эталонными грузами.
Задачей, на решение которой направлено заявленное изобретение, является повышение точности измерений физической величины за счет:
прямого преобразования времени разряда конденсатора через активное электрическое сопротивление чувствительного элемента (резистора) в цифровой сигнал;
статистической обработки результатов измерения;
обеспечения независимости полученного результата измерений от напряжения источника электропитания;
снижения зависимости результатов измерения от температуры окружающей среды.
Еще одной задачей изобретения является уменьшение энергозатрат при передаче данных в пункт приема по беспроводной линии связи с использованием автономного источника электропитания.
Дополнительные решаемые задачи и преимущества заявленного изобретения будут понятны из последующего описания.
Поставленные технические задачи решаются тем, что в способе измерения физической величины, включающем преобразование ее в цифровой сигнал с последующей индикацией результатов измерения или передачей в пункт приема информации по беспроводной линии связи, согласно изобретению преобразование физической величины в цифровой сигнал производят путем:
определения времен разряда конденсатора последовательно через два резистора, по крайней мере, один из которых изменяет свое сопротивление при изменении физической величины;
преобразования времен разряда через указанные резисторы в соответствующие промежуточные цифровые сигналы и запоминания промежуточных цифровых сигналов;
сравнения промежуточных цифровых сигналов;
и формирования выходного цифрового сигнала по результату сравнения промежуточных цифровых сигналов.
Достижению технического результата способствуют также частные существенные признаки изобретения.
Определение времен разряда конденсатора последовательно через два резистора и преобразование времен разряда в соответствующие промежуточные цифровые сигналы с последующим их сравнением выполняют, по крайней мере, два раза, с запоминанием результатов сравнения, а формирование выходного цифрового сигнала выполняют с учетом всех запомненных результатов сравнения.
Предпочтительно определение времен разряда конденсатора последовательно через резисторы и преобразование времен разряда конденсатора в соответствующие промежуточные цифровые сигналы с последующим их сравнением выполняют последовательно через, по крайней мере, две пары резисторов, в каждой из которых, по крайней мере, один из резисторов изменяет сопротивление при изменении физической величины, с запоминанием результатов сравнения, а формирование выходного цифрового сигнала выполняют с учетом всех запомненных значений результатов сравнения.
Дополнительно измеряют температуру окружающей среды, значение которой используют для корректировки значения измеряемой физической величины.
До передачи выходного сигнала в пункт приема его дополнительно преобразуют в цифровой последовательный код проводной и/или беспроводной линии связи.
До начала измерений задают с помощью компьютера либо другого внешнего устройства допустимую ошибку измерения и запоминают ее, в процессе измерения определяют фактическую ошибку измерения и рассогласование между фактической и допустимой ошибкой измерения по величине и знаку и определяют частоту передачи результатов измерения по беспроводной линии связи в зависимости от рассогласования между фактической и допустимой ошибкой измерения.
Сущность заявленного технического решения заключается в том, что вместо традиционных мостовых измерительных схем используется схема последовательного измерения времени разряда предварительно заряженного конденсатора через, по крайней мере, два резистора (сначала через первый резистор, потом через второй), по крайней мере, один из которых изменяет свое сопротивление при изменении значения физической величины. Времена разряда конденсатора через резисторы могут быть измерены с высокой точностью специализированным высокоточным микроконтроллером (разрешение цифрового сигнала, т.е. фактически значение младшего значащего бита, соответствует интервалу времени ≈14 пикосекунд (14·10-12 с), таким образом, если считать, разрешение составляет половину младшего значащего разряда (МЗР), то это разрешение (rМЗР) равно 7·10-12 с). Один из резисторов, чувствительный к изменению физической величины, изменяет свое активное сопротивление.
В качестве другого резистора может быть использован либо высокостабильный резистор, не изменяющий свое сопротивление при изменении физической величины, либо резистор, изменяющий при изменении физической величины свое сопротивление в противоположном первому резистору направлении. Резисторы заранее подбираются таких номиналов, что при некотором начальном, среднем или номинальном значении физической величины значения сопротивлений двух резисторов равны.
Конденсатор после заряда до напряжения, равного напряжению источника питания, разряжается до некоторого порогового значения. После достижения порогового значения напряжения на конденсаторе разряд прекращается и начинается заряд до напряжения источника питания. Интервал времени, в течение которого происходил разряд, измеряется специализированным микроконтроллером, приспособленным для высокоточного измерения (с ошибкой измерения не более 7 пикосекунд) временных интервалов. Значение этого интервала, сразу определенное в микроконтроллере в виде цифрового кода, запоминается во внутренней памяти микроконтроллера. Как известно, время разряда связано со значениями емкости конденсатора и сопротивления резистора соотношением:
T=R·C,
где Т - постоянная времени, с, это время разряда конденсатора до напряжения, равного 36,8% от начального значения;
R - сопротивление резистора, Ом;
С - емкость конденсатора, Ф.
Практически чаще используется другая приближенная формула:
τ=0,7·R·С,
где τ - время разряда конденсатора до напряжения, равного ≈0,5 начального значения.
Затем осуществляется повторный заряд конденсатора до напряжения, равного напряжению источника питания, и последующий разряд конденсатора через второй резистор до того же порогового значения, последующее определение и запоминание в микроконтроллере интервала времени разряда конденсатора через второй резистор. Затем в микроконтроллере определяется разность между полученными временами, по ее величине и знаку определяется изменение значения физической величины и новое ее значение.
Если при начальном значении физической величины сопротивления обоих резисторов равны, то равны и величины времен разряда конденсатора через резисторы, а их разность равна нулю, т.е. физическая величина имеет свое исходное начальное значение.
Если же значение физической величины изменилось, то изменится время разряда конденсатора через резистор (резисторы), сопротивление которого (которых) также изменилось. При этом в микроконтроллере разность времен разрядов станет отличной от нуля. При этом в случае использования резисторов с обратными зависимостями их сопротивлений от изменения физической величины результирующий сигнал будет больше, чем в случае использования высокостабильного резистора в качестве второго резистора. Но в любом случае по ее величине и знаку определяется зависимое от ее значения изменение значения физической величины и новое ее значение.
Математически это описывается следующим образом. Например, для измерения деформаций металлических конструкций и силовых нагрузок на них широко используются проволочные тензорезисторы. Начальное значение сопротивления проволочного тензорезистора при отсутствии деформации материала, на который он наклеен, составляет, например, R0=350 Ом. Сопротивление высокостабильного резистора остается всегда постоянным, равным R0=350 Ом, кроме того, он может быть и вообще не наклеен на деформируемый материал. Максимальное изменение сопротивления тензорезистора ΔR при деформации материала составляет обычно не более 0,2% от его номинального значения, т.е. ΔR=2·10-3·R0=0,7 Ом. Сопротивление резистора при деформации материала R1=R0+ΔR=350,7 Ом. Время разряда конденсатора τ0 через высокостабильный резистор равно τ0=0,7·R0·C, а время разряда конденсатора τ1 через тензорезистор при деформации материала:
τ1=0,7·R1·C=0,7·(R0+ΔR)·C
После вычитания первого уравнения из второго и преобразования результата получается формула:
δR=ΔR/R0=(τ1-τ0)/(0,7·R0·C),
где δR - относительное изменение сопротивления тензорезистора при деформации материала.
При максимальной относительной деформации материала δLмакс, составляющей обычно 10-3, максимальное относительное изменение сопротивления тензорезистора δRмакс=(ΔR/R0)макс=2·10-3, т.е. в пределах упругих деформаций можно считать, что относительная деформация равна
δL=0,5·δR=0,5·(ΔR/R0).
А относительная деформация в свою очередь связана с величиной действующей силы (или давления) линейной зависимостью:
Р=KδL·δL,
где KδL - масштабный коэффициент, зависящий от деформируемого материала, его размеров и упругих свойств материала. На практике определяется опытным путем, хотя существуют расчетные формулы для тел простейшей формы.
А так как δL линейно связана с Δτ=(τ1-τ0), то в итоге получается формула для расчета действующей силы:
Р=K·Δτ,
где K - масштабный коэффициент.
При максимальной относительной деформации материала δLмакс, составляющей обычно 10-3, максимальное относительное изменение сопротивления тензорезистора δRмакс=(ΔR/R0)макс=2·10-3, т.е. в пределах упругих деформаций можно считать, что
δL=0,5·δR=0,5·(ΔR/R0).
Пусть емкость разрядного конденсатора составляет 200 нФ, т.е. 200·10-9 Ф. При максимальной деформации δRмакс=2·10-3 разность времен Δτмакс=(τ1-τ0)макс или Δτмакс=δRмакс·0,7·R0·C=2·10-3·0,7·350·200·10-9≈10-7 с.
Учитывая, что разрешение составляет половину младшего значащего разряда двоичного числа, как было указано ранее, равно rМЗР=7·10-12 с, максимальное значение разности времен разряда Δτмакс для данного примера составляет Δτмакс≈10-7 с или 10-7/(2·7·10-12)=7000 младших значащих разрядов, что эквивалентно ≈13-битному числу. При использовании в качестве второго резистора тензорезистора с обратным первому изменением сопротивления при деформации, как это делается в обычных тензомостах, значение Δτмакс будет примерно в 2 раза больше и соответственно составит ≈14000 младших значащих разрядов, что эквивалентно уже ≈14-битному числу. Такова же будет и разрядность результата единичного измерения - деформации или силы, действующей на деформируемый материал при использовании предлагаемого способа. Этой точности в большинстве случаев тензоизмерений более чем достаточно для решения большинства практических прикладных задач. Надо отметить, что тензоизмерения являются одним из самых тяжелых видов измерений по причине очень малых изменений исходных значений сопротивлений (не более 0,2%). В других случаях можно ожидать более высокую точность результата измерения. Поэтому при дальнейшем описании изобретения будет рассматриваться в качестве примера измерение деформации (нагрузки) с помощью тензорезисторов.
В этом и заключается сущность предлагаемого способа - замена существующего способа измерения очень слабого сигнала мостового преобразователя, требующего наличия высокостабильного источника напряжения питания моста и его последующего преобразования в цифровой сигнал дорогим, высокоточным, многоразрядным АЦП с очень низким уровнем шумов, измерением времен разряда конденсатора последовательно через два резистора, сопротивление, по крайней мере, одного из которых зависит от значения измеряемой физической величины, сравнением этих времен разряда и определением по результатам этого сравнения значения измеряемой физической величины. Для реализации предлагаемого способа не требуется прецизионный и высокостабильный источник питания, не требуется высокоточный многоразрядный АЦП и даже требуемое минимальное количество резисторов здесь в два раза меньше, чем при использовании известного способа. При всем этом точность получаемого результата оказывается выше, чем у известного способа.
Так как предлагаемый способ предусматривает заряд одного и того же конденсатора от источника питания, его последовательный разряд через два резистора и последующее сравнение времен разряда, то нет никакой необходимости иметь высокостабильный источник питания. Так как время разряда очень мало зависит от колебаний напряжения источника питания, а при использовании автономного источника питания оно вообще не зависит от этих колебаний, потому что процесс заряда конденсатора сглаживает кратковременные колебания напряжения, вызванные, например, кратковременным включением и выключением отдельных блоков устройства для реализации предлагаемого способа (датчика физической величины), в конце процесса заряда напряжение на конденсаторе практически не изменяется. А так как происходит сравнение времен разряда конденсатора от напряжения источника питания до одного и того же напряжения, составляющего, например, половину напряжения источника питания, то сами времена разряда и результат их сравнения совершенно не зависят от напряжения источника питания и его стабильности. Снижение напряжения автономного источника во времени протекает на много порядков медленнее процессов заряда и разряда и, благодаря операции сравнения времен разряда, никак не влияет на точность результата измерения. Более того, некоторое снижение напряжения автономного источника питания по мере его использования приводит к снижению уровня шумов результатов измерений и повышению точности. По этой же причине на точность измерения практически не оказывает никакого воздействия старение конденсатора и резисторов во времени и связанное с этим некоторое изменение их номиналов.
Операции последовательного заряда и разряда конденсатора через резисторы по сравнению с известным способом приводят к еще одному очень неожиданному, но важному результату. Помимо того что мостовая схема требует для своего питания высокостабильный и прецизионный источник питания с напряжением не менее 10-15 В, ток, потребляемый мостовой схемой, обычно составляет 10-60 мА. При питании датчика от сети или вторичного источника питания это не вызывает никаких проблем. Проблемы начинаются при использовании автономного источника питания. Это и величина напряжения питания, потому что приходится собирать батарею из отдельных элементов, при этом растет внутреннее сопротивление источника питания и, что более важно для автономного источника, потеря энергии на нем. Но самое неприятное - это ток, потребляемый таким датчиком. При таком токе потребления емкости около 3,2 А/ч марганцевощелочного АА-элемента хватит не больше чем на 3-12 суток. Для автономного датчика это недопустимо маленький срок.
При использовании предлагаемого способа, во-первых, нет необходимости иметь источник такого высокого напряжения, достаточно напряжения 3,6 В, которое дают выпускаемые в настоящее время литиевые батарейки. Измерительная схема сохраняет свою работоспособность при снижении напряжения питания до ≈2 В, и то в основном потому, что это нижний предел питания для других электронных компонентов (микроконтроллеры, компараторы и т.д.). Этого напряжения (2-3,6 В) достаточно и для питания всей электронной части датчика. Во-вторых, ток, потребляемый конденсатором при зарядке, очень мал и составляет в среднем 300 мкА. Учитывая, что разряд конденсатора продолжается дольше, чем заряд, так как конденсатор разряжается через резисторы номиналом 350-1000 Ом, а заряд идет практически напрямую от источника, внутреннее сопротивление которого в десятки и сотни раз меньше, а также то, что конденсатор разряжается не до конца, интегрально ток, потребляемый измерительной зарядно-разрядной цепью, не превышает 50-100 мкА. Это в сотни раз меньше, чем в известном способе. Электронная схема обработки сигналов потребляет в известном способе от 1 до 10 мА в зависимости от режима работы. Так как в предлагаемом способе заряды и разряды чередуются и электроника тоже работает активно не все время, а в основном обработка полученных времен разряда идет во время заряда конденсатора, то потребление при непрерывной работе электроники составит 300-1000 мкА. Такой потребляемый ток позволяет использовать малогабаритные литиевые батарейки в качестве автономного источника питания со сроком службы без замены (при непрерывной работе) в течение не менее чем 120-180 дней. Такой срок для автономного датчика может считаться вполне достаточным. Т.е. использование предлагаемого способа позволяет создавать автономные датчики с достаточным временем автономной работы без замены источника питания.
Сопротивление практически всех существующих резисторов, в том числе используемых для измерения физических величин, как правило, заметно зависит от температуры резистора, т.е. фактически от температуры окружающей среды, в которой выполняются измерения. Поэтому практически все измерительные цепи, использующие резисторы в качестве чувствительных элементов, имеют в своем составе цепи термокомпенсации. Конечно, температура среды не меняется так быстро, как измеряемая величина, и, как правило, ее влияние на изменение сопротивления меньше, чем измеряемой физической величины, поэтому измерять ее достаточно только в отдельные моменты времени и считать, что между измерениями она остается постоянной. Но если в известном способе изменение температуры всегда приводило к дополнительной разбалансировке измерительного моста и изменению выходного напряжения даже для совершенно идентичных идеальных резисторов, то при использовании предлагаемого способа и двух чувствительных к изменению физической величины резисторов, разность времен разряда через эти резисторы зависит от изменения температуры значительно (на несколько порядков) в меньшей степени, и эта зависимость в основном обусловлена лишь небольшими различиями температурных коэффициентов сопротивления двух резисторов, обусловленными технологическими особенностями их изготовления, например тем, что используются резисторы из разных партий поставки. Для большинства практических задач влиянием этого фактора можно пренебречь. А если его все-таки надо учитывать, то его учет в силу его малости представляет гораздо меньшие трудности как в аппаратном решении с помощью дополнительных резисторов в измерительной цепи датчика, так и в программном с использованием микроконтроллера блока обработки сигналов.
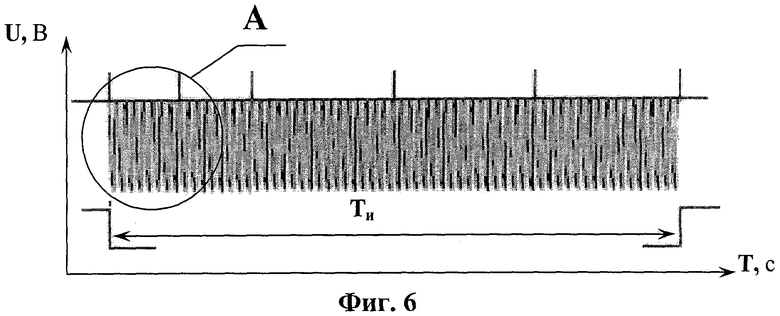
Поскольку предлагаемый способ использует для измерения определение времен разряда конденсатора через резисторы, то процесс измерения протекает достаточно быстро. Так, например, если при тензоизмерениях и номиналах резисторов 350÷1000 Ом и емкости конденсатора в диапазоне 30÷300 нФ ((30-300)·10-9 Ф) время разряда через один резистор составляет ≈8-75 мкс, через оба резистора - ≈16-150 мкс, то с учетом времени, необходимого для зарядки конденсатора, за 1 с может быть выполнено от ≈5000 до ≈50000 измерений. Т.е. время одиночного измерения Теи может составлять ≈20-200 мкс. Такая частота измерений явно избыточна для большинства практических задач, так как обычные скорости измерения большинства физических величин с помощью резисторов гораздо меньше и их измерения достаточно делать от 2 до 10 раз в секунду. При этом появляется реальная возможность использовать избыточность измерений для дополнительного повышения точности, т.е. проводить не один замер, а много, запоминать все промежуточные результаты, а затем методами математической статистики определять среднее значение (математическое ожидание) и дисперсию или среднеквадратическое отклонение результата от его математического ожидания. Кроме того, выполнение операции определения времен разряда конденсатора последовательно через два резистора и преобразования времен разряда в соответствующие промежуточные цифровые сигналы с последующим их сравнением, по крайней мере, два раза, с запоминанием результатов сравнения и формированием выходного цифрового сигнала с учетом всех запомненных результатов сравнения реально позволяет снизить влияние случайных шумов на результат измерения и значительно повысить точность. Так, при наличии в микроконтроллере блока обработки сигналов 12-разрядного счетчика числа измерений можно выполнять 4096 измерений с последующим осреднением их результатов. При этом по сравнению с одиночным измерением среднеквадратическое значение ошибки измерения с осреднением может быть уменьшено в √4096=64 раза, что эквивалентно увеличению разрешения результата на 6 разрядов. Т. е. разрешение результата составляет при этом уже не 12-13 разрядов, а практически 14-17 разрядов, что позволяет создавать измерительную систему с не менее чем 10000-100000 делений, не добавляя к ее аппаратному решению никаких высокоточных прецизионных элементов. При использовании известного способа для статистической обработки множества измерений необходимо квантование аналогового выходного сигнала тензомоста и его последующее высокочастотное аналого-цифровое преобразование, недостатки которого были описаны выше. Кроме того, для большинства известных АЦП при высоких частотах преобразования характерны провалы в разрешении при высоких частотах преобразования.
Ранее отмечалось, что для использования известного способа необходимо иметь четыре резистора, соединенные в мост Уитстона. При использовании предлагаемого способа достаточно двух резисторов, которые можно назвать полумостом. Однако в данном способе можно также использовать четыре резистора, образующие две пары. Конденсатор при этом будет последовательно заряжаться и разряжаться через эти две пары резисторов и времена разряда будут сравниваться для каждой пары, затем по результатам сравнения определяется результат или результаты измерения. Это может быть результат осреднения измерений по временам разряда через все четыре резистора, если они установлены в одной точке или рядом, по крайней мере, в окрестности, в которой физическая величина имеет одно конкретное значение. Это могут быть два результата, каждый для своего места установки чувствительных резисторов, т.е. при этом получают два значения физической величины в разных разнесенных точках среды. Предлагаемый способ в этом случае позволяет использовать во второй паре резисторы с отличным от первой пары номиналом независимо от взаимного их расположения.
Все перечисленные варианты допускают также многократные измерения с последующей статистической их обработкой, как это было описано ранее. Это также приводит к дополнительному повышению точности измерений в √2≈1,41 раз увеличению разрешения или дает ≈1 дополнительный разряд в разрешении.
Использование двух пар резисторов имеет еще одно дополнительное преимущество по сравнению с известным способом. Это повышение надежности за счет резервирования. Вторая пара резисторов может быть использована при выходе первой пары из строя, т.е. выполнять функции «горячего» резерва, переход на измерения с ее использованием может быть осуществлен практически мгновенно при получении информации микроконтроллером о неисправности или выходе из строя первой пары резисторов. При этом не требуется калибровка этой второй пары, так как она может быть выполнена при изготовлении датчика.
Таким же образом можно использовать не только две, а и большее количество, например четыре пары, резисторов. Количество определяется только возможностями микроконтроллера блока обработки сигналов. Установка дополнительных пар резисторов приводит к дополнительному повышению точности и/или надежности, хотя при этом несколько возрастает время одного измерения Ти.
Измерение дополнительной физической величины (температуры окружающей среды, значение которой используют для корректировки значения измеряемой физической величины) позволяет повысить точность измерения основной физической величины. Несмотря на то что предлагаемый способ позволяет получать результаты, в очень малой степени зависящие от температуры, при которой производится измерение, благодаря последовательному разряду конденсатора через резисторы с практически одинаковой температурой, некоторая зависимость результата от температуры имеет место. В силу малости этой зависимости ее учет в микроконтроллере блока обработки сигнала не представляет трудностей. Однако для того чтобы в случае необходимости учесть температуру, необходимо ее знать или измерять в месте установки датчика. Предлагаемый способ позволяет легко это сделать, используя тот же самый принцип, лежащий в основе способа, а именно последовательный заряд и разряд конденсатора сначала через терморезистор, например с положительным температурным коэффициентом сопротивления (ТКС), а затем через резистор с отрицательным ТКС. В качестве второго резистора может быть также использован высокостабильный резистор, сопротивление которого не зависит от температуры. Т.е. в данном случае температура среды и является тем самым измеряемым значением физической величины. Только эта величина в данном способе является дополнительной, которая измеряется для того, чтобы учесть влияние ее на результат измерения другой, основной, физической величины. На самом деле этот способ может быть использован для измерения именно температуры как основной измеряемой физической величины.
Преобразование выходного сигнала (до передачи в пункт приема) в цифровой последовательный код проводной и/или беспроводной линии связи позволяет использовать заявленный способ при разработке цифровых датчиков, использующих как нестандартный протокол обмена данными, так и стандартные, широко распространенные протоколы, например RS232, RS422, RS485 и др. При этом данные цифровые датчики остаются универсальными и допускают использование их без каких-либо конструктивных доработок в системах контроля, управления и безопасности грузоподъемных кранов как с кабельными линиями связи между элементами данной системы, так и с беспроводными или комбинированными линиями связи.
Определение в процессе измерения фактической ошибки измерения и рассогласования между фактической и заранее заданной допустимой ошибкой измерения по величине и знаку позволяет установить частоту передачи результатов измерения по беспроводной линии связи в зависимости от рассогласования между фактической и допустимой ошибкой измерения, т.е. фактически определять частоту включения приемопередатчика в режим передачи, и совсем отключать режим передачи (переводить приемопередатчик в «спящий» режим), когда сигналы от измерительного преобразователя не изменяются или изменяются в пределах требуемых ошибок измерения, тем самым исключая излишнее чрезмерное и ненужное энергопотребление от автономного источника питания и увеличивая срок его службы без замены. Процедура, связанная с определением рассогласования между фактической и допустимой ошибкой измерения, в настоящее время не представляет трудностей. Допустимая ошибка измерения каждого параметра крана может быть задана заранее, до начала измерений, т.е. перед первым включением системы контроля, управления и безопасности грузоподъемного крана, на основе требований к точности работы данной системы и алгоритма решения системой задачи обеспечения безопасной и безаварийной работы крана. Допустимая ошибка измерения может быть задана как статистическая, например среднеквадратическое отклонение ошибки оценки значения измеряемого параметра, так и как предельно допустимое значение ошибки измерения какого-либо параметра крана. При этом ошибка может быть задана не только как значение измеряемого параметра, а и как минимально допустимое число значащих разрядов результата, которые обеспечивают требуемую точность работы данной системы. Такой подход часто используется в цифровых системах на основе микроконтроллеров. При работе крана фактическая ошибка измерения может быть вызвана характером и скоростью изменения измеряемого параметра работы крана, алгоритмом измерительного процесса, качеством работы электронной аппаратуры датчика и т.д. Если при работе крана измеряемый параметр изменяется медленно или остается неизменным, то ошибка его определения остается неизменной или уменьшается. Если же параметр меняется быстро, то ошибка его определения увеличивается. Соответственно изменяется и разность между указанными ошибками. Если фактическая ошибка измерения выше допустимой, то частота включения режима передачи увеличивается, а интервал между двумя соседними включениями уменьшается, и наоборот. При отсутствии груза или изменения его веса фактическая ошибка измерения резко уменьшается, и включение передатчика может осуществляться с большими интервалами, например одна минута и более. Такой подход исключает излишние включения передачи сигнала по беспроводной линии связи и позволяет свести к минимуму энергопотребление приемопередатчика и измерительного преобразователя. Кроме того, при этом может быть снижена частота работы измерительного преобразователя, что также сказывается благоприятно на экономии ресурса батареи.
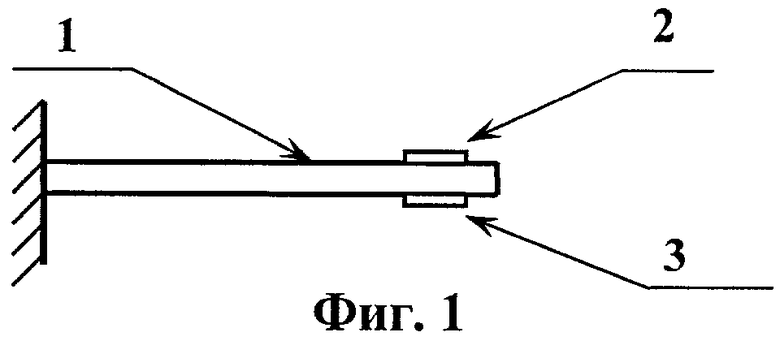
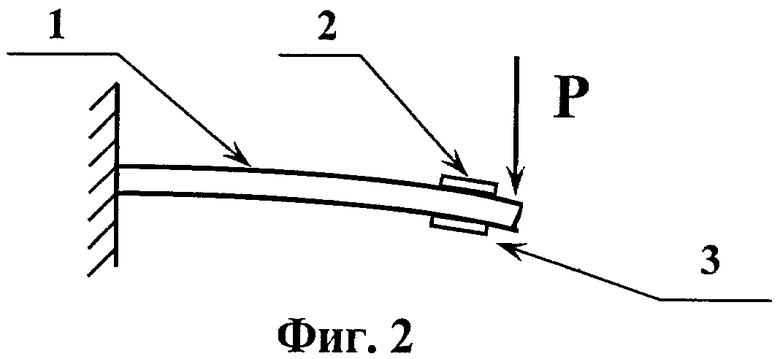
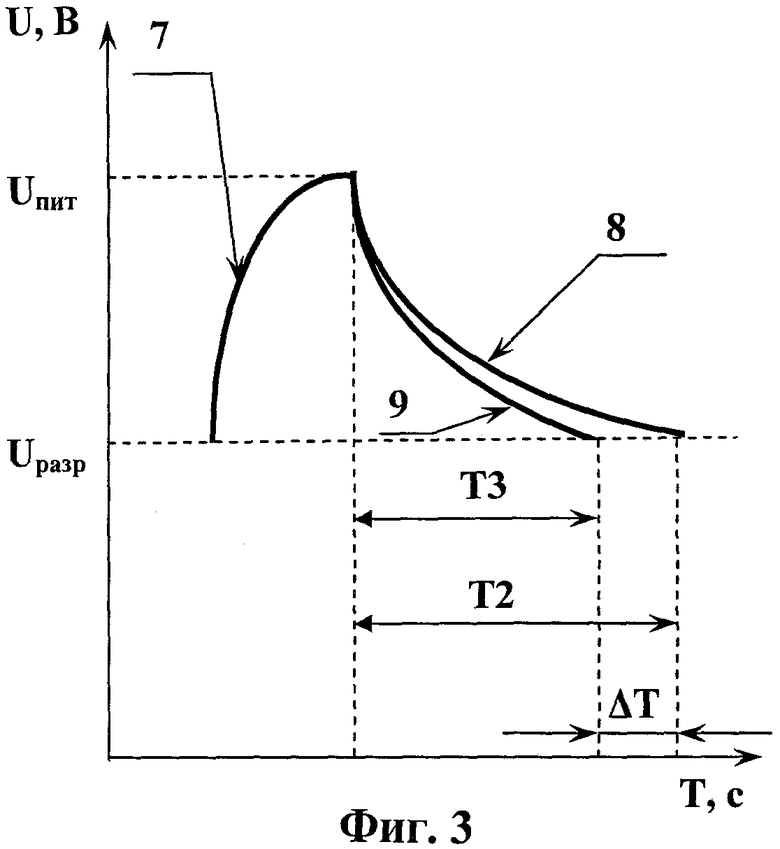
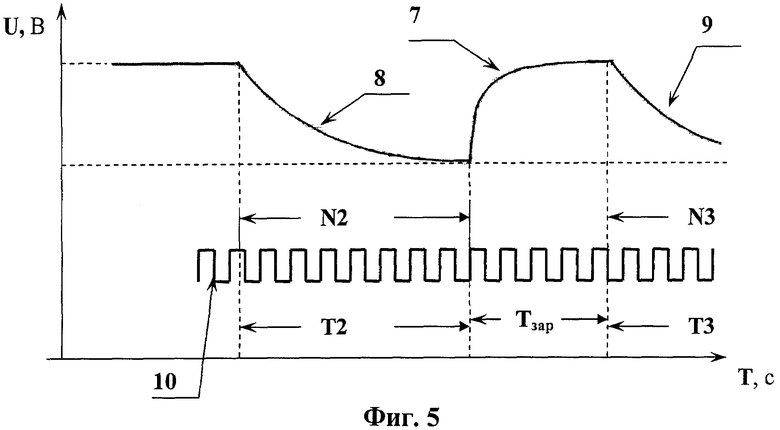
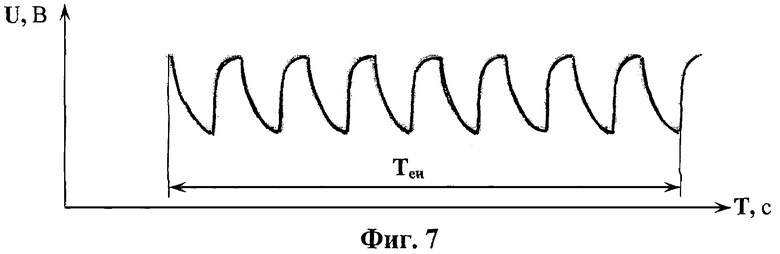
На фиг.1 и 2 схематически показан датчик усилия балочного типа с наклеенными двумя тензорезисторами без нагрузки и с нагрузкой Р; на фиг.3 приведена диаграмма, поясняющая процесс заряда и разряда конденсатора через резисторы в соответствии с предлагаемым способом; на фиг.4 показана функциональная схема, реализующая процессы заряда и разряда конденсатора последовательно через два резистора; на фиг.5 показана схема предварительного подсчета импульсов при разряде конденсатора; на фиг.6 показан процесс многократных зарядов и разрядов конденсатора через две пары резисторов с последующей статистической обработкой результатов отдельных измерений за период измерений Ти; на фиг.7 показан в растянутом масштабе процесс заряда и последующего разряда в течение времени Теи, принятого за время единичного измерения.
Способ измерения физической величины, например усилия на грузозахватном органе грузоподъемного крана, осуществляется следующим образом.
Под действием нагрузки Р упругий элемент 1 датчика усилия деформируется, вместе с ним происходит деформация наклеенных на него тензорезисторов 2 и 3. Тензорезистор 2 сопротивлением R2, равным, например, 350 Ом, наклеен на поверхность упругого элемента, которая при нагружении растягивается, и его сопротивление при этом увеличивается на величину ΔR2. Тензорезистор 3 сопротивлением R3, равным, например, 350 Ом, наклеен на поверхность упругого элемента, которая при нагружении сжимается, и его сопротивление при этом уменьшается при максимальном нагружении на величину ΔR3=ΔR2=ΔR=0,7 Ом. Это идеальный вариант полумоста из тензорезисторов, при котором выходной сигнал тензометрического преобразователя максимальный. Практические конструкции упругих элементов не всегда предполагают равенство деформаций растяжения и сжатия и, следовательно, равенство по величине изменений сопротивлений обоих тензорезисторов, т.е. реальна ситуация, при которой ΔR2≠ΔR3. Более того, возможна измерительная цепь, состоящая из одного тензорезистора, например 2, и обычного высококачественного и высокостабильного резистора 3, который никуда не наклеен и не изменяет своего сопротивления при нагружении упругого элемента, т.е. ΔR3=0. Эти ситуации не меняют сути рассматриваемого вопроса, они лишь приводят к уменьшению выходного сигнала с полумоста и к снижению точности и разрешающей способности тензодатчика.
В ненагруженном состоянии упругого элемента R2=R3=350 Ом. Подобрать изначально сопротивления резисторов 2 и 3 абсолютно равными практически никогда не удается, но существуют операции и процедуры балансировки, многократно и подробно описанные в технической литературе и патентах (см., например: Г.Виглеб. Датчики. Устройство и применение, М.: Мир, 1989, с.62-76; Контрольно-измерительные приборы и инструменты: Учебник / С.А.Зайцев и др., М.: ИЦ «Академия», 2008; Методы практического конструирования при нормировании сигналов с датчиков: по материалам семинара «Practical design techniques for sensor signal conditioning» / М., Автекс, 1999, с.2-1-3-45), поэтому здесь не рассматриваются.
Для реализации предлагаемого способа необходимо последовательно переключать конденсатор 4 вначале в режим заряда (кривая 7) от источника питания 5, затем в режим разряда (кривая 8) через тензорезистор 2, после этого снова в режим заряда (кривая 7) от источника питания 5, после чего в режим разряда (кривая 9) через тензорезистор 3. Эта перекоммутация может осуществляться с помощью переключателей 6, в роли которых могут быть использованы электронные ключи, например, как входящие в состав специализированного микроконтроллера (на чертеже не показан), приспособленного для определения разности времен разряда конденсатора 4 через резисторы 2 и 3, так и внешние электронные ключи. Срабатывание переключателей 6 организовано внутренними и/или внешними командами микроконтроллера, а, например, управление моментом отключения процесса разряда может быть выполнено с использованием различных делителей напряжения и пороговых устройств, наиболее известным из которых является компаратор.
Для реализации предлагаемого способа в качестве резисторов могут быть использованы тензорезисторы фирмы "ZEMIC" (КНР) или другие тензорезисторы подобного типа, например тензорезисторы ЗАО "Весоизмерительная компания "Тензо-М".
В качестве конденсатора может быть использован поливинилсульфидный конденсатор, характеризующийся стабильностью и малыми потерями.
В качестве специализированного микроконтроллера могут быть использованы выпускаемые в настоящее время так называемые время-цифровые преобразователи (ВЦП). Используя современные технологии CMOS по скорости прохождения сигнала, разработаны и производятся ВЦП и микроконтроллеры, содержащие ВЦП с использованием линий задержки. Это, например, специализированные микроконтроллеры, такие, например, как TDC-F1, TDC-GPX, TDC-GP2 и другие фирмы Асаm (Германия), содержащие ВЦП. Комбинация линий задержки, синхронизирующей и вычислительной части этих микроконтроллеров позволила создать недорогие, компактные ВЦП с разрешением в пикосекундном диапазоне. В основе принципа измерения ВЦП лежит подсчет абсолютного числа прохождений фронтов импульсов 9 измеряемого сигнала через линии задержки.
В качестве компаратора может быть использована микросхема 74HC1G14 фирмы Philips Semiconductors с низким уровнем шумов. Компаратор может быть также собран по дифференциальной схеме с высоким коэффициентом подавления помех источника питания на биполярных транзисторах типа 2N5087. Многие микроконтроллеры содержат встроенные компараторы, но, к сожалению, эти встроенные компараторы предназначены для других задач (контроль напряжения источника питания) и поэтому их точность для решения задачи измерения явно недостаточна.
В качестве дополнительного микроконтроллера управления (на чертеже не показан) при передаче информации внешним потребителям по проводной или беспроводной линии связи может использоваться простейший микроконтроллер, например MSP430F149 фирмы "Texas Instruments" (США). Его задачи: управление распределением электроэнергии между потребителями в зависимости от требуемой частоты обновления информации, преобразование выходного сигнала в цифровой последовательный код проводной и/или беспроводной линии связи и контроль уровня напряжения автономного источника питания.
Для реализации системы беспроводной передачи данных можно использовать радиомодули компании Chipcon. Для питания элементов устройства, реализующего данный способ, может быть использован, например, литиевый гальванический элемент или аккумулятор в сочетании с солнечным элементом для его подзарядки или с периодической подзарядкой от внешнего источника питания.
Единичный цикл измерения состоит из следующих этапов.
А. Измерение нагрузки (силы, давления)
1. Заряд (кривая 7) конденсатора 4 емкостью С, равной, например, 200 нФ, от источника 5 питания до напряжения источника питания Uпит, равного 3,0 В.
2. Разряд (кривая 8) конденсатора 4 через тензорезистор 2 от напряжения Uпит до напряжения Upaзp=0,5·Uпит, при котором переключатель 6 разрывает цепь разряда, передача N2 импульсов 10, сформированных за интервал времени разряда Т3 конденсатора 4 через тензорезистор 2, в ВЦП, расчет в ВЦП в цифровом виде времени разряда Т2 конденсатора 4 через тензорезистор 2. Тактовые импульсы могут формироваться тактовым генератором микроконтроллера, содержащего ВЦП, или внешним кварцевым генератором, подключенным к этому микроконтроллеру. Лучше использовать внешний кварцевый генератор, так как встроенные генераторы имеют, как правило, более высокий уровень шумов.
3. Заряд (кривая 7) конденсатора 4 от источника 5 питания до напряжения Uпит.
4. Разряд (кривая 9) конденсатора 4 через тензорезистор 3 от напряжения Uпит до напряжения Upaзp=0,5·Uпит, при котором переключатель 6 разрывает цепь разряда, передача N3 импульсов 10, сформированных генератором тактовых импульсов за интервал времени Т3 разряда конденсатора 4 через тензорезистор 3, в ВЦП, расчет в ВЦП в цифровом виде времени разряда Т3 конденсатора 4 через тензорезистор 3.
5. Вычисление разности времен разряда конденсатора 4 через резисторы 2 и 3: ΔТ=Т2-Т3, и запоминание в памяти микроконтроллера, содержащего ВЦП.
6. Вычисление в микроконтроллере, содержащем ВЦП, действующей на упругий элемент датчика силы Р (или давления) по формуле:
Р=K·ΔТ,
где K - масштабный коэффициент пересчета разности времен ΔТ в значение нагрузки (силы, давления) Р.
Б. Осреднение результата по нескольким замерам
Несмотря на высокое разрешение результата измерения физической величины (силы Р в данном примере) при использовании предлагаемого способа, сам результат может содержать случайную шумовую составляющую, вызванную тепловыми шумами, внутренними шумами электронной схемы, шумами источника питания и т.д. Часть этой ошибки может быть частично устранена дополнительными калибровками аппаратуры. Однако полностью избавиться от этих шумов не удается. Гораздо больший эффект дает осреднение результата по нескольким замерам. При этом сначала выполняются несколько последовательных М циклов заряда и разряда конденсатора 4 через резисторы 2 и 3 с запоминанием промежуточных значений ΔTi (I=1÷М). Количество М этих циклов ограничено только требованиями к быстродействию процесса измерения и обновления результатов, объемом памяти микроконтроллера и разрядностью адресов. Так, при 12-разрядной шкале возможно получить М=212=4096 единичных измерений и затем определять среднее значение ΔТср как
ΔTсp=(ΣΔTi)/M,
а затем определить силу Р по формуле Р=К·ΔТср.
При этом среднеквадратическое отклонение ошибки определения силы Р от ее среднего значения уменьшится в √4096=64 раза. Соответственно разрешение результата увеличится на 6 разрядов. Это очень высокий показатель, особенно учитывая, что он получен без усложнения схемы и введения в нее дополнительных высокоточных и дорогих компонентов. На самом деле для большинства практических задач такое количество единичных замеров для осреднения избыточно. Как правило, с использованием предлагаемого способа для многих практических задач может оказаться достаточным проведение четырех измерений (четыре разряда конденсатора через резистор 2 и четыре разряда - через резистор 3). Уже при таком их числе удается снизить шум измерений в 2 раза. Поэтому при решении практических задач удобнее считать единичным измерением проведение четырех измерений с последующим их осреднением и время этого измерения Теи, равное
Теи=8·ТЗАР+4·Т2+4·Т3,
считать единичным измерением. В последней формуле ТЗАР - время заряда конденсатора. На практике оно составляет ≈30% от времени разряда.
При необходимости дальнейшего повышения точности результата можно проводить дополнительное осреднение, считая эти четыре измерения единичным измерением, повторяя его L раз, и тогда общее время измерения Ти будет равно
Ти=L·Теи
В. Осреднение результата по замерам разрядов конденсатора через две и более пары резисторов
В этом случае осреднение может проводиться по результатам замеров последовательных разрядов конденсатора через несколько пар резисторов, например через две или через четыре, при этом в каждую пару должен входить, по крайней мере, один резистор, чувствительный к изменению физической величины. Эта операция приводит к тем же результатам, что и описанное в предыдущем пункте осреднение по нескольким замерам времен разряда с одной пары резисторов, т.е. фактическая избыточность измерений приводит к повышению точности результата. Однако использование нескольких пар резисторов дает некоторые дополнительные преимущества. Во-первых, резервирование измерительных цепей. В случае выхода из строя одного или двух резисторов одной измерительной цепи и обнаружения этой неисправности микроконтроллером есть возможность «горячего» (без выключения) отключения неисправной пары и перехода на вторую пару резисторов. Наличие четырех измерительных пар позволяет в этом случае создать очень высоконадежный датчик с трехкратным резервированием измерительной цепи. Во-вторых, при таком переходе не требуется никакой дополнительной калибровки измерительного устройства. В-третьих, появляется возможность использовать в разных измерительных парах резисторы с разными номиналами, что также может быть очень полезно при использовании резисторов различных производителей и может благотворно сказаться на точности измерения быстротекущих процессов.
Г. Измерение температуры окружающей среды в месте проведения измерений
Хотя предлагаемый способ позволяет частично устранить влияние изменения температуры среды на результат измерения, в ряде случаев для повышения точности учет температуры оказывается необходим. Но температура сама по себе является физической величиной, от величины которой зависит сопротивление большинства резисторов. И существуют специальные резисторы, у которых эта зависимость имеет ярко выраженный и стабильный характер. Это терморезисторы. Они выпускаются разных типов, как с положительным ТКС, так и с отрицательным ТКС. Выпускаются также термостабильные резисторы, сопротивление которых не изменяется в широком диапазоне температур. Предлагаемый способ предназначен как раз для измерения таких величин, для которых существуют резисторы, чувствительные к их изменению. Конечно, полученная и использованием данного способа точность определения температуры явно избыточна, поэтому никакого осреднения в данном случае проводить не нужно, достаточно единичное измерение, причем это измерение можно проводить для уменьшения общего энергопотребления достаточно редко, например один раз в 5-10 секунд, а в ряде случаев и еще реже. Для измерения нужна также измерительная цепь, состоящая также из двух резисторов 2 и 3 и конденсатора 4, но в качестве резистора 2 используется терморезистор с положительным ТКС номиналом R2=500 Ом, а в качестве резистора 3 используется или высокостабильный резистор или резистор с отрицательным ТКС с тем же номиналом R3=500 Ом.
Последовательность операций при измерении температуры t следующая.
1. Заряд 7 конденсатора 4 емкостью С, равной, например, 10 нФ, от источника 5 питания до напряжения Uпит.
2. Разряд 8 конденсатора 4 через терморезистор 2 от напряжения Uпит до напряжения Uразр=0,5·Uпит, при котором переключатель 6 разрывает цепь разряда, передача N2 импульсов 10 за интервал времени разряда Т3 конденсатора 4 через терморезистор 2 в ВЦП, расчет в ВЦП в цифровом виде времени разряда Т2 конденсатора 4 через терморезистор 2.
3. Заряд 7 конденсатора 4 от источника питания до напряжения Uпит.
4. Разряд 10 конденсатора 4 через высокостабильный резистор или терморезистор 3 от напряжения Uпит до напряжения Upaзp=0,5·Uпит, при котором переключатель 6 разрывает цепь разряда, передача N3 импульсов 10 за интервал времени Т3 разряда конденсатора 4 через высокостабильный резистор или терморезистор 3 в ВЦП, расчет в ВЦП в цифровом виде времени разряда Т3 конденсатора 4 через высокостабильный резистор или терморезистор 3.
5. Вычисление разности времен разряда конденсатора 4 через резисторы 2 и 3: ΔT=Т2-Т3, и запоминание в памяти микроконтроллера, содержащего ВЦП.
6. Вычисление в микроконтроллере, содержащем ВЦП, температуры t окружающей среды по формуле:
t=t0+Kt·ΔT,
где K - масштабный коэффициент пересчета разности времен ΔT в изменение значения температуры t;
t0 - значение температуры, при которой R2=R3.
Затем производится коррекция измеренного значения физической величины, в данном случае силы Р, с учетом фактического значения температуры. Способы температурной коррекции тензоизмерений хорошо известны и описаны в патентной и технической литературе, поэтому здесь не излагаются.
Д. Преобразование выходного сигнала (до передачи в пункт приема) в цифровой последовательный код проводной и/или беспроводной линии связи
Полученное в результате измерения значение нагрузки Р далее преобразуется дополнительным микроконтроллером в последовательный код для передачи внешним потребителям. Это может быть код в соответствии с интерфейсами UART или SPY, если аппаратная реализация предусматривает дальнейшую обработку сигнала другим микроконтроллером. Потребность в другом микроконтроллере может возникнуть, если необходимо управлять режимами работы датчика, такими как режим передачи сигнала внешним потребителям с использованием проводной или беспроводной линии связи. Для этого дополнительный микроконтроллер преобразует полученный код в последовательный интерфейс для конкретного режима, например в RS232, RS422, RS485, CAN и др., при передаче информации по кабелю на внешнее удаленное устройство, в последовательный код для передачи по радиоканалу или в интерфейс I2c при передаче сигнала на свой собственный индикатор.
Преобразование выходного сигнала (до передачи в пункт приема) в цифровой последовательный код проводной и/или беспроводной линии связи позволяет использовать заявленный способ при разработке цифровых датчиков, использующих как нестандартный протокол обмена данными, так и стандартные, широко распространенные протоколы, например RS232, RS422, RS485, CAN и др. При этом данные цифровые датчики остаются универсальными и допускают использование их без каких-либо конструктивных доработок в системах контроля, управления и безопасности грузоподъемных кранов как с кабельными линиями связи между элементами данной системы, так и с беспроводными или комбинированными линиями связи.
Это управление может также задавать частоту передачи сигнала внешним потребителям, а при использовании автономного источника питания это управление задает режимы работы датчика (например, рабочий, ждущий или спящий) в зависимости от режима работы внешнего управляющего устройства для обеспечения энергосбережения и увеличения срока службы автономного источника питания.
Использование предлагаемого способа позволяет, как было описано ранее, определять не только значение измеряемой величины (в нашем примере силы Р), но и среднеквадратическое отклонение отклонения этого значения от его математического ожидания, т.е. фактическую ошибку измерения. Это значение может оказаться очень важным при определении частоты обновления и передачи информации внешним потребителям. Можно до начала измерений, например при настройке датчика или системы безопасности крана, задать дополнительному микроконтроллеру допустимое значение ошибки измерения. Допустимая ошибка измерения каждого измеряемого параметра работы крана, в том числе и силы Р, может быть задана заранее на основе требований к точности работы системы и алгоритма решения системой задачи обеспечения безопасной и безаварийной работы крана. Эта ошибка может быть задана как статистическая, например среднеквадратическая ошибка оценки значения измеряемого параметра. В процессе измерений также вычисляется разность между фактической ошибкой измерений и допустимой. Если при работе крана сила Р изменяется медленно или остается неизменной, то ошибка ее определения остается неизменной или уменьшается. Если же параметр меняется быстро, то точность его определения снижается. Соответственно изменяется и разность между ошибками. Эта разность определяется дополнительным микроконтроллером, в котором также производится определение требуемой частоты включения приемопередатчика в режим передачи. Если фактическая ошибка измерения ниже допустимой, то частота включения режима передачи уменьшается, а интервал между двумя соседними включениями увеличивается, и наоборот. При отсутствии груза или изменения его веса фактическая ошибка измерения резко уменьшается, и включение передатчика может осуществляться с большими интервалами, например одна минута и более. Такой подход исключает излишние включения передачи сигнала по радиоканалу и позволяет свести к минимуму энергопотребление приемопередатчика и всего модуля. Кроме того, при этом может быть снижена частота измерения, что также сказывается благоприятно на экономии ресурса батареи.
Предлагаемый способ может быть реализован промышленным способом с использованием современных электронных компонентов и технологий.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИК ФИЗИЧЕСКОЙ ВЕЛИЧИНЫ | 2010 |
|
RU2442964C1 |
| СПОСОБ ТЕМПЕРАТУРНОЙ КОРРЕКТИРОВКИ ПЕРЕДАЮЩЕЙ ФУНКЦИИ ДАТЧИКА ФИЗИЧЕСКОЙ ВЕЛИЧИНЫ | 2003 |
|
RU2247325C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДАВЛЕНИЯ | 2005 |
|
RU2300745C2 |
| ОГРАНИЧИТЕЛЬ НАГРУЗКИ ГРУЗОПОДЪЕМНОГО КРАНА | 2010 |
|
RU2445252C1 |
| МНОГОТОЧЕЧНОЕ ЧАСТОТНОЕ УСТРОЙСТВО ИЗМЕРЕНИЯ ДАВЛЕНИЯ, МАССЫ И ДЕФОРМАЦИЙ | 2015 |
|
RU2584341C1 |
| МИКРОКОНТРОЛЛЕРНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ С УРАВНОВЕШИВАНИЕМ РЕЗИСТИВНОГО МОСТА УИТСТОНА МЕТОДОМ ШИРОТНО-ИМПУЛЬСНОЙ МОДУЛЯЦИИ | 2012 |
|
RU2515309C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ОТНОСИТЕЛЬНЫХ ДЕФОРМАЦИЙ И ТЕМПЕРАТУРЫ | 2018 |
|
RU2681431C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДАВЛЕНИЯ | 2009 |
|
RU2396528C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СИЛЫ | 2009 |
|
RU2396527C1 |
| Способ регулировки чувствительности к поперечным силам и изгибающим моментам тензорезисторного датчика силы | 1990 |
|
SU1728685A1 |
Изобретение относится к измерительной технике и может быть использовано в измерительных, сигнальных, регулирующих или управляющих системах. Способ измерения физической величины включает преобразование ее в цифровой сигнал с последующей индикацией результатов измерения или передачей в пункт приема информации по беспроводной линии связи. Преобразование физической величины в цифровой сигнал производят путем определения времен разряда конденсатора последовательно через два резистора, по крайней мере, один из которых изменяет свое сопротивление при изменении физической величины, преобразования времен разряда через указанные резисторы в соответствующие промежуточные цифровые сигналы и запоминания промежуточных цифровых сигналов, сравнения промежуточных цифровых сигналов и формирования выходного цифрового сигнала по результату сравнения промежуточных цифровых сигналов. Технический результат заключается в повышении точности измерения. 5 з.п. ф-лы, 7 ил.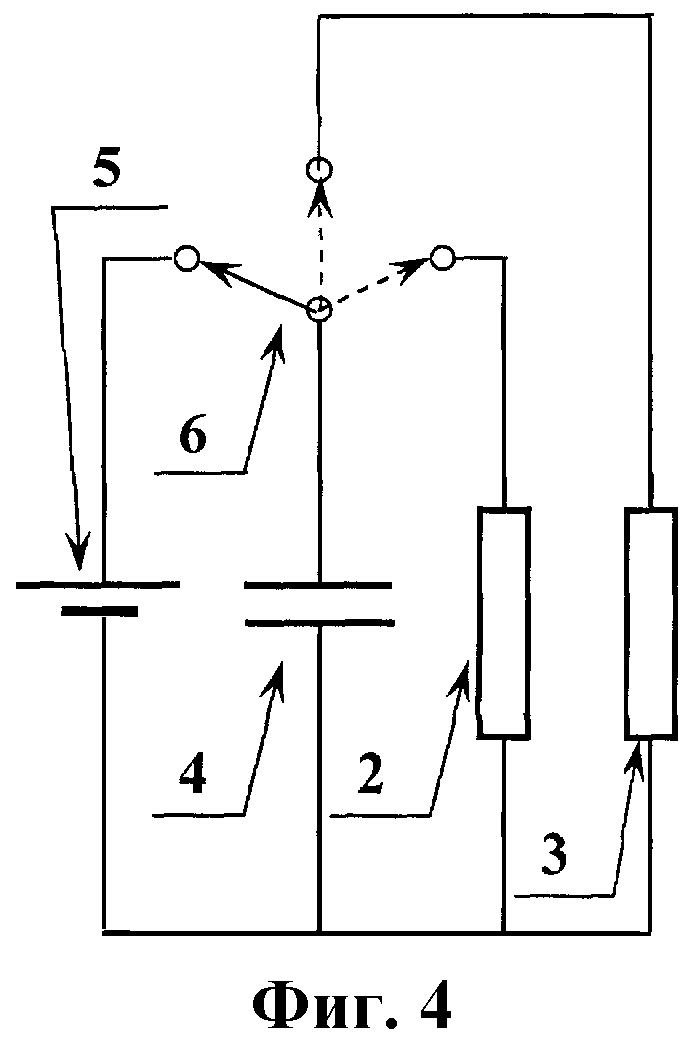
1. Способ измерения физической величины, включающий преобразование ее в цифровой сигнал с последующей индикацией результатов измерения или передачей в пункт приема информации по беспроводной линии связи, отличающийся тем, что преобразование физической величины в цифровой сигнал производят путем определения времен разряда конденсатора последовательно через два резистора, по крайней мере, один из которых изменяет свое сопротивление при изменении физической величины, преобразования времен разряда через указанные резисторы в соответствующие промежуточные цифровые сигналы и запоминания промежуточных цифровых сигналов, сравнения промежуточных цифровых сигналов, и формирования выходного цифрового сигнала по результату сравнения промежуточных цифровых сигналов.
2. Способ по п.1, отличающийся тем, что определение времен разряда конденсатора последовательно через два резистора и преобразование времен разряда в соответствующие промежуточные цифровые сигналы с последующим их сравнением выполняют, по крайней мере, два раза, с запоминанием результатов сравнения, а формирование выходного цифрового сигнала выполняют с учетом всех запомненных результатов сравнения.
3. Способ по п.1, отличающийся тем, что определение времен разряда конденсатора последовательно через резисторы и преобразование времен разряда конденсатора в соответствующие промежуточные цифровые сигналы с последующим их сравнением выполняют последовательно через, по крайней мере, две пары резисторов, в каждой из которых, по крайней мере, один из резисторов изменяет сопротивление при изменении физической величины, с запоминанием результатов сравнения, а формирование выходного цифрового сигнала выполняют с учетом всех запомненных значений результатов сравнения.
4. Способ по п.1, отличающийся тем, что дополнительно измеряют температуру окружающей среды, значение которой используют для корректировки значения измеряемой физической величины.
5. Способ по п.1, отличающийся тем, что до передачи выходного сигнала в пункт приема его дополнительно преобразуют в цифровой последовательный код проводной и/или беспроводной линии связи.
6. Способ по п.1, отличающийся тем, что до начала измерений задают с помощью компьютера либо другого внешнего устройства допустимую ошибку измерения и запоминают ее, в процессе измерения определяют фактическую ошибку измерения и рассогласование между фактической и допустимой ошибкой измерения по величине и знаку, и определяют частоту передачи результатов измерения по беспроводной линии связи в зависимости от рассогласования между фактической и допустимой ошибкой измерения.
| УСТРОЙСТВО ДЛЯ ПРОМЫВКИ ФИЛЬТРУЮЩЕЙ ПОВЕРХНОСТИ В ФИЛЬТР-ПРЕССАХ | 1947 |
|
SU69990A1 |
| СПОСОБ ОБМЕНА ИНФОРМАЦИЕЙ МЕЖДУ МОДУЛЯМИ СИСТЕМЫ БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОГО КРАНА И СИСТЕМА БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОГО КРАНА | 2002 |
|
RU2251524C2 |
| СПОСОБ ОБМЕНА ИНФОРМАЦИЕЙ МЕЖДУ МОДУЛЯМИ СИСТЕМЫ БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОГО КРАНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2232709C2 |
| Клещевая разводка для пил | 1937 |
|
SU53774A1 |

