Изобретение относится к пусковым установкам (ПУ) подводных лодок (ПЛ), а конкретно к ПУ, имитирующим в наземных условиях подводный старт ракеты.
Рассматривается ПУ, с помощью которой осуществляется подводный минометный старт ракеты. Старт осуществляется путем создания в заракетном пространстве пусковой трубы избыточного давления газов, действующего на днище ракеты и ее обтюрирующий пояс. Для создания давления используется, например, стартовый газогенератор, размещаемый в подракетном объеме пусковой трубы. Под действием этого давления ракета выбрасывается из ПУ.
Целью заявляемого изобретения является имитация подводного старта ракеты на участке ее движения в ПУ от момента запуска стартового газогенератора до момента выхода заднего торца ракеты из пусковой трубы, осуществляемая путем проведения наземного старта полноразмерного макета ракеты из ПУ.
Ближайшим аналогом имитации такого вида старта можно считать техническое решение, содержащееся в материалах патента РФ №2082936, МПК 41F 3/07.
В упомянутом техническом решении для наземной имитации условий подводного старта с помощью порохового ракетного двигателя (двигатели-противотяги) создают продольную силу, действующую на ракету против направления ее движения, эквивалентную суммарной силе от гидростатического давления на глубине старта, гидродинамического сопротивления и силы трения при движении ракеты продольно в ПУ.
Это решение имеет следующие недостатки:
1. На испытаниях расходуются дорогостоящие пороховые двигатели-противотяги, специально проектируемые, изготавливаемые и испытываемые для каждого эксперимента.
2. Тяга порохового двигателя всегда имеет технологические отклонения (±25%) от требуемых для имитации старта величин, что ухудшает качество имитации.
3. В ходе эксперимента тяга порохового двигателя не регулируется, ее величина выбирается по предполагаемому среднему значению имитируемых сил, поэтому изменение во времени отдельных составляющих имитируемых сил воспроизводить в принципе невозможно. Результаты экспериментов позволяют получить только принципиально важные характеристики динамики старта, не воспроизводя в точности переменных условий старта.
4. К экспериментальной установке должны быть предъявлены специальные требования по пожаро-взрывобезопасности работы с пороховыми ракетными двигателями, а это существенно увеличивает стоимость стенда.
Предлагаемый способ имитации и устройство для его осуществления не содержит указанных недостатков.
Вместо пороховых двигателей для имитации продольных сил, действующих на ракету при подводном старте, к макету ракеты против направления ее движения прикладывают силу, развиваемую пневматической поршневой системой (ППС), схема которой представлена на фиг. 1, 2, 3.
В ППС имеются:
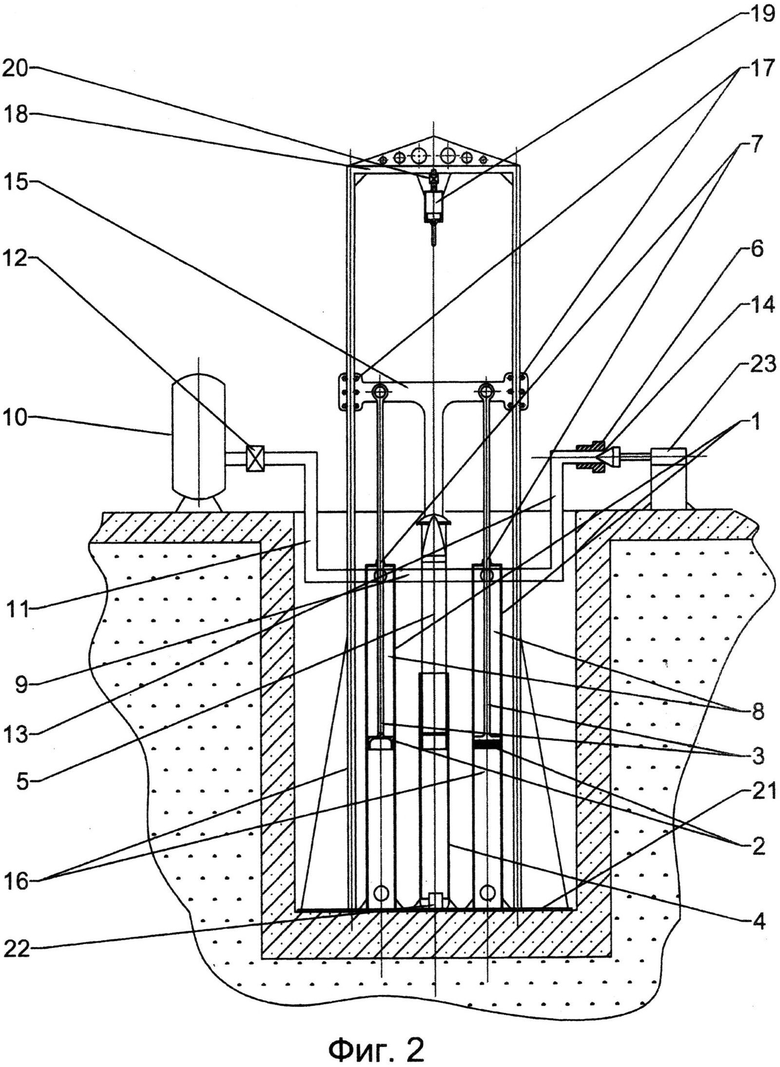
1. Два одинаковых силовых цилиндра (1) с поршнями (2) и штоками (3). Длина рабочей части пневмоцилиндров примерно на 20-30% больше длины ПУ (4).
2. Поршни ППС имеют штоки (3), проходящие через уплотнения (7) в верхней части силовых пневмоцилиндров, в которых образуются рабочие газовые полости (8). Обе газовые полости соединены между собой коллекторами (9), которые выравнивают давления в газовых полостях пневмоцилиндров.
Коллектор имеет входной (11) и выходной (13) трубопроводы. Входной трубопровод, соединенный с баллоном высокого давления (10), оборудован отсечным клапаном (12). Выходной трубопровод (13) оборудован регулятором расхода, имеющим дроссель (6) с регулируемым отверстием (14) и приводом (23) для изменения площади регулируемого отверстия дросселя и регулирования расхода газа из газовых полостей.
Цилиндры ППС скреплены нижней частью с горизонтальной фундаментной плитой (21). ПУ (4) своей нижней частью также скреплена с фундаментной плитой.
Параллельно оси ПУ на равных расстояниях от нее установлены соединенные с фундаментом две направляющие (16), скрепленные между собой в верхней части балкой (18). К носовой части макета ракеты (5) прикреплена траверса (15). К траверсе прикреплены штоки ППС для передачи на макет ракеты силы от давления в ППС. Траверса оборудована роликовыми опорами (17) для обеспечения движения штоков пневмоцилиндров параллельно оси ПУ.
К балке (18) прикреплено тормозное устройство в виде пневмоцилиндра (19), оборудованного предохранительным клапаном (20).
Имитация условий подводного старта с помощью предлагаемой системы для ее реализации осуществляется следующим образом.
1. До запуска стартового генератора (22) (см. фиг. 1) с помощью ППС имитируется воздействие гидростатической силы на макет ракеты при заданной глубине старта.
Для этого, используя баллон высокого давления (10), через входной трубопровод (11) закачивают газ в рабочие газовые полости силовых пневмоцилиндров (8), при этом в выходном трубопроводе (13) регулируемое отверстие (14) закрыто. В момент, когда Рцил(t) становится равным Рнач, срабатывает отсечной клапан (12) и накачка газом прекращается.
Измеряют давление Рцил(t) и температуру Тцил(t) газа в рабочих полостях пневмоцилиндров
При этом величина давления Рнач определяется по формуле:
где
Sцил [м2] - суммарная площадь поршней пневмоцилиндров ППС;
Sпу [м2] - площадь поперечного сечения внутренней полости ПУ;
ρ=1020 [кг/м3] - плотность морской воды;
g=9.81 [м/с2] - ускорение свободного падения;
H0 [м] - заданная глубина старта.
2. Запускают стартовый газогенератор (22), обеспечивая повышение давления в подракетном пространстве ПУ (8). После того как газодинамическая сила, действующая на дно макета, превысит суммарную силу, включающую вес макета, гидростатическую силу и силу трения, макет ракеты начинает движение. С этого момента открывается регулируемое отверстие дросселя (14) выходного трубопровода (13) для выпуска газа из рабочих полостей цилиндров ППС (8).
3. После начала движения макета ракеты производят измерение текущих значений следующих параметров:
- давления газа P(t) и температуры газа T(t) в рабочих полостях пневмоцилиндра;
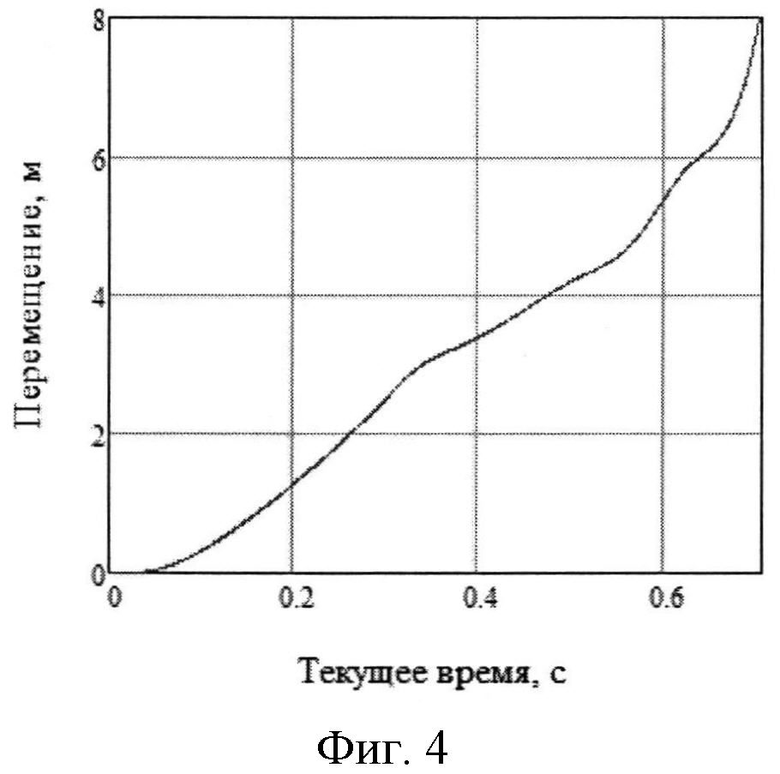
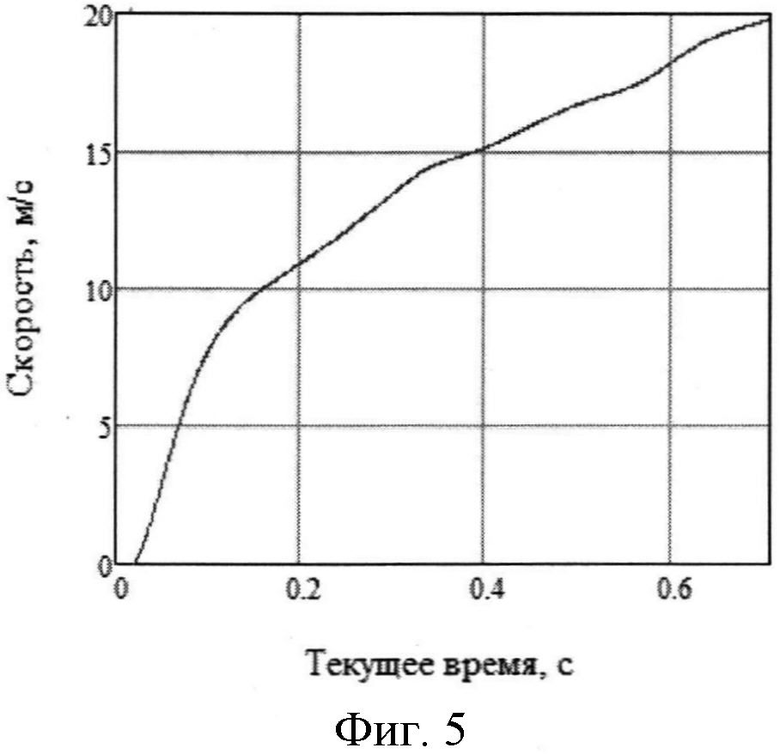
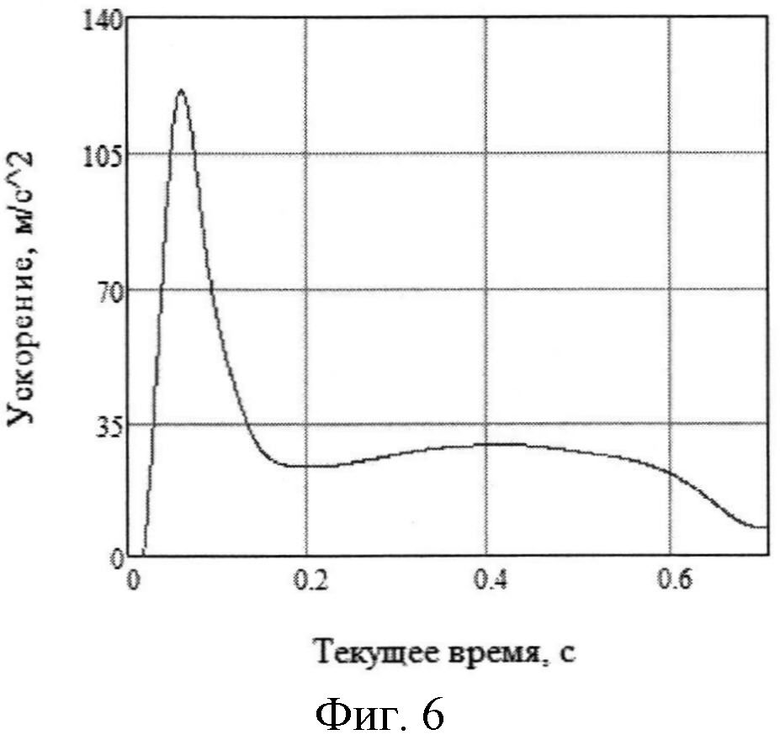
- перемещения макета ракеты X(t), скорости и ускорения макета ракеты 

- площади регулируемого отверстия дросселя Sдр(t);
4. Вычисляют по замеренным параметрам величину требуемого давления газа в рабочих полостях пневмоцилиндров 
 ,
,
где
Sцил [м2] - суммарная площадь поршней пневмоцилиндров,
Sпу [м2] - площадь поперечного сечения внутренней полости ПУ,
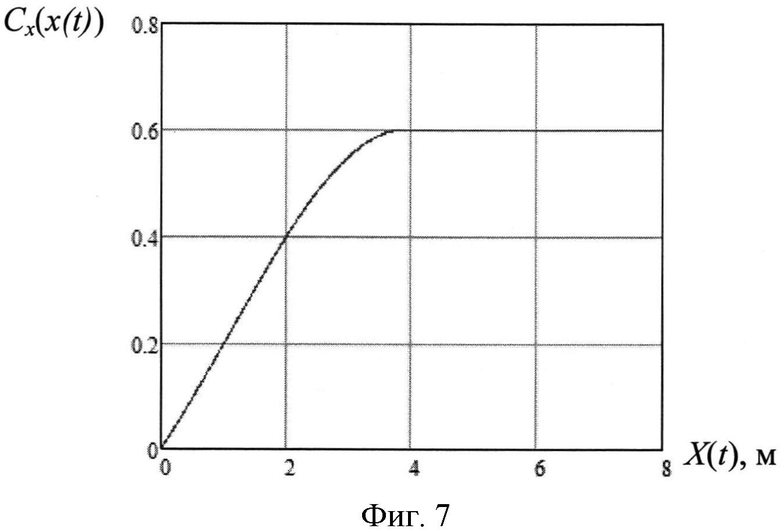
Cx(x(t)) - расчетное значение коэффициента продольного гидродинамического сопротивления ракеты в зависимости от измеренного перемещения x(t),
λ11 [кг] - присоединенная масса ракеты в направлении продольной оси,
Fтр [Н] - сила трения опор и обтюратора макета при контакте с внутренними стенками ПУ,
5. По измеренным величинам Pцил(t) определяют величину скорости изменения давления в рабочих полостях пневмоцилиндров 


где:
Kp - передаточный коэффициент давления, величина которого принимается в диапазоне от 0.4 до 0.6,
Kpp - передаточный коэффициент скорости изменения давления, величина которого принимается в диапазоне от 0.02 до 0.04.
6. Изменяют величину площади регулируемого отверстия дросселя Sдр(t) до требуемой величины 


где:
Ks - передаточный коэффициент скорости регулирования, величина которого принимается в диапазоне от 10 до 30,
посредством чего приводят величину измеренного давления Pцил(t) к требуемой величине 
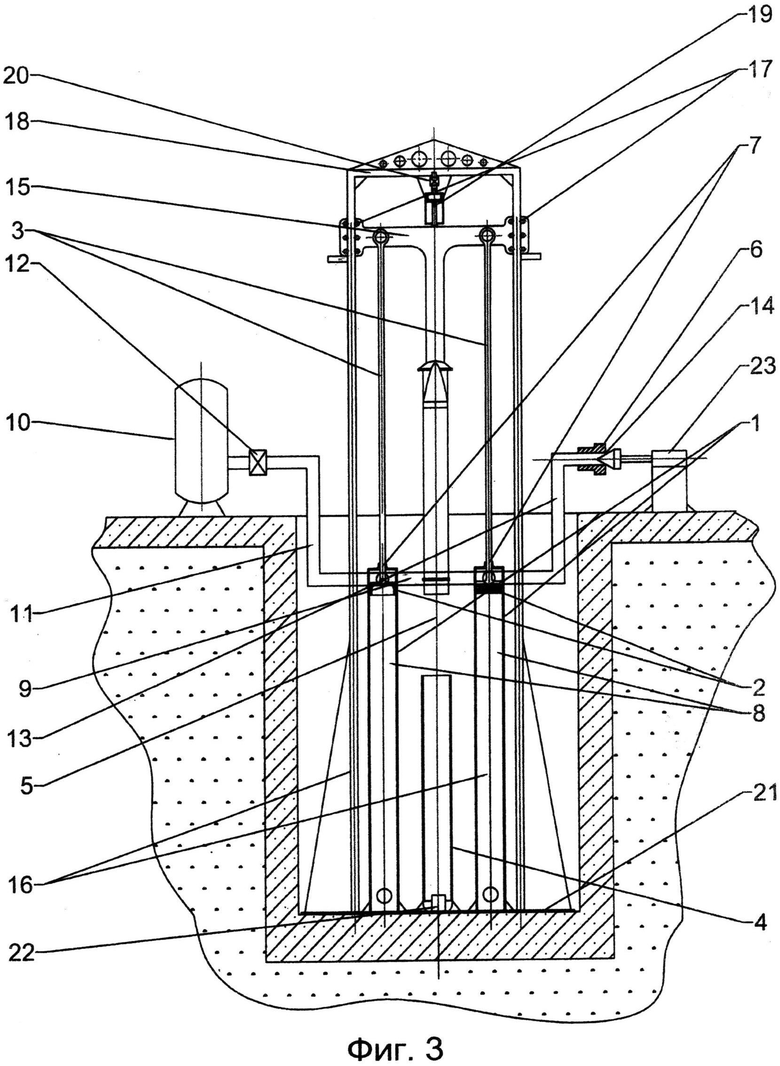
7. После выхода торца ракеты из ПУ с помощью пневмоцилиндров (8) и тормозного устройства (19), (20) осуществляют торможение макета вплоть до полной его остановки и фиксации, для чего в конструкции штоков пневмоцилиндров предусмотрено увеличение длины штоков и пневмоцилиндров, а также нправляющих по сравнению с длиной пусковой трубы примерно на 20-30%. Для торможения в ППС при необходимости может быть использовано дополнительное тормозное устройство (19), (20).
На фиг. 1, 2, 3 показана схема экспериментальной установки в трех стадиях эксперимента:
- В начальной (до начала движения макета ракеты, фиг. 1);
- В промежуточной (в процессе движения макета ракеты, фиг. 2);
- В конечной (после полного торможения и фиксации макета ракеты, фиг. 3).
Приведем численный пример применения предлагаемых способа и устройства для имитации подводного старта.
Рассмотрим старт ракеты массой 3000 кг с глубины Н0=43 м из ПУ длиной 8 м и с площадью поперечного сечения Sтпк=0,33 м2.
В результате газодинамического расчета минометного старта ракеты были получены зависимости от времени перемещения x(t), скорости перемещения 

В данном расчете гидродинамические силы моделировались в соответствии со следующими формулами:
- сила гидростатического давления:

- сила гидродинамического сопротивления:


Cx(x(t)) принимается в соответствии с фиг. 7.
Рассмотрим эксперимент, в котором масса конструкции макета ракеты, конструкция ПУ и характеристики стартового газогенератора полностью совпадают с теми, для которых был проведен газодинамический расчет. Будем считать, что полученные в результате расчета газодинамики старта ракеты параметры движения макета ракеты x(t), 

Примем для ППС следующие характеристики:
- диаметр каждого пневмоцилиндра Dцил=0.2 м;
- диаметр штока dшт=0.02 м;
- суммарная рабочая площадь двух силовых пневмоцилиндров Sцил=0.062 м2;
- общий начальный рабочий объем полостей пневмоцилиндров W0 с учетом участка торможения Lторм=3 м равен 0.682 м3;
- путь, проходимый макетом ракеты внутри ПУ, равен 8 м.
Как следует из формул (3) и (4), требуемые для имитации подводного старта величины гидродинамических сил при заданной начальной глубине H0 и при известных исходных данных (согласно (5) и фиг. 7) являются функциями величин x(t), 
Если для имитации гидродинамических сил (3) и (4) с помощью ППС удается обеспечить требуемый закон изменения от времени давления в рабочих полостях пневмоцилиндров 
Представим систему уравнений для определения силы для имитации подводного старта, создаваемой давлением Pцил(t) внутри пневмоцилиндров, при которой макет ракеты имеет параметры x(t),
Текущее значение плотности газа p(t) в цилиндре можно найти, интегрируя уравнение
 ,
,
здесь:
G(t) - весовой расход газа через дроссельное отверстие;
W(t) - текущее значение объема газа в пневмоцилиндрах.
Учитывая, что


С учетом (7) и (8) уравнение (6) имеет вид:

Начальные условия для уравнения (9):

Т0 - начальное значение температуры газа, принимается T0=293K;
R=286 - газовая постоянная;
Начальное значение давления газа в пневмоцилиндрах:

Здесь:
ρ=1020 кг/м3 - плотность морской воды;
g=9.81 м/с2 - ускорение свободного падения;
H0=43 м - глубина старта;
Sпу=0.33 м2 - площадь поперечного сечения ПУ;
Sцил=0.062 м2 - суммарная площадь поперечного сечения пневмоцилиндров за вычетом площадей штоков.
Текущие значения давления Pцил(t) в пневмоцилиндре:

здесь n - показатель политропы, n=1.4.
Текущие значения производной давления 

Текущее значение температуры Тцил(t)

Текущее значение весового расхода G(t) через дроссельное отверстие:

Здесь 
где k=1.4 - отношение теплоемкостей,
φ=0.9 - коэффициент расхода.
Требуемое текущее значение давления в пневмоцилиндрах:

Для имитации необходимо, чтобы регулирование площади дроссельного отверстия обеспечивало минимальное отличие Pцил(t) от 
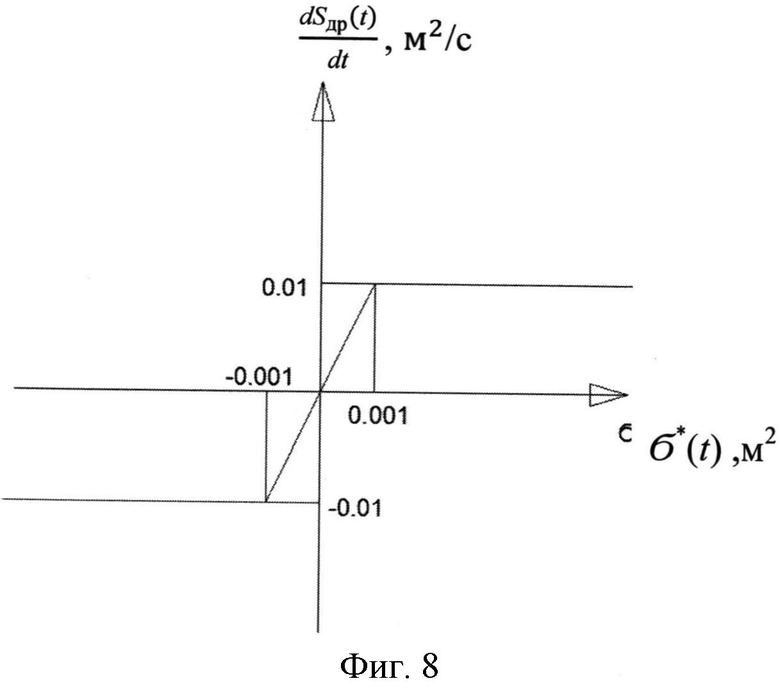
Уравнение для скорости изменения площади поперечного сечения дросселя (Sдр(t)) имеет вид:

Здесь:
 - Сигнал рассогласования
- Сигнал рассогласования

 - требуемая величина площади отверстия дросселя
- требуемая величина площади отверстия дросселя 

 - требуемая величина площади с учетом ограничения на предельную площадь отверстия дросселя
- требуемая величина площади с учетом ограничения на предельную площадь отверстия дросселя 

kP и kPP - передаточные коэффициенты.
kP - передаточный коэффициент давления, величина которого принимается от 0.4 до 0.6,
kPP - передаточный коэффициент скорости изменения давления, величина которого принимается от 0.02 до 0.04.
Для рассмотренного численного примера примем  .
.
Начальные значения площади дроссельного отверстия:
Sдр(t)=0 при t=0
Функция F(σ*) представлена в виде графика (фиг. 8).
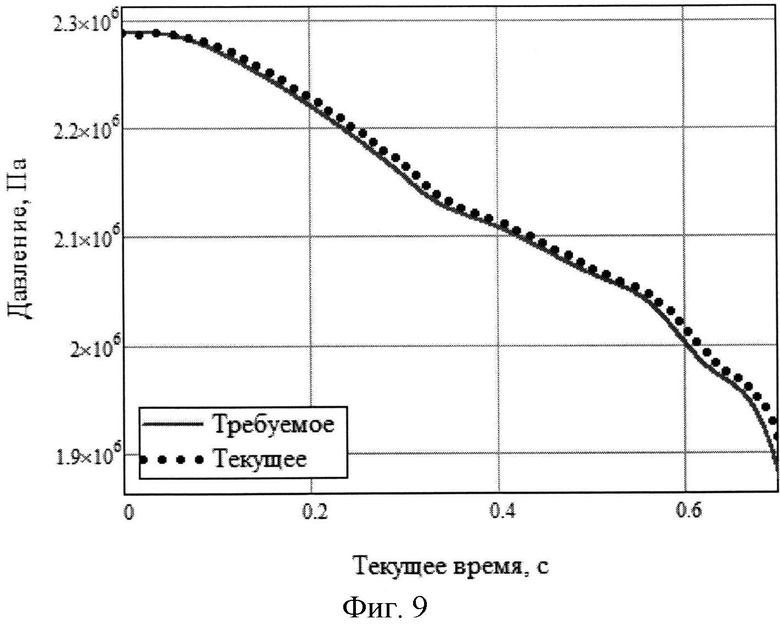
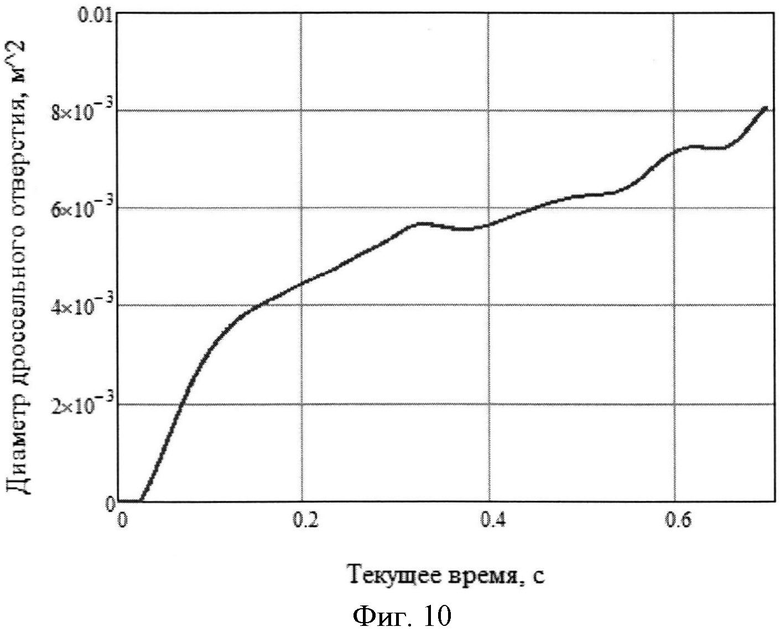
В результате решения системы уравнений (6)-(22) были получены законы изменения от времени давления Pцил(t), площади дроссельного отверстия Sдр(t) и проведено приведение давления Pцил(t) к требуемому давлению 
Были рассмотрены 3 варианта имитации сил подводного старта:
1. Имитация только гидростатического давления (фиг. 9, 10).
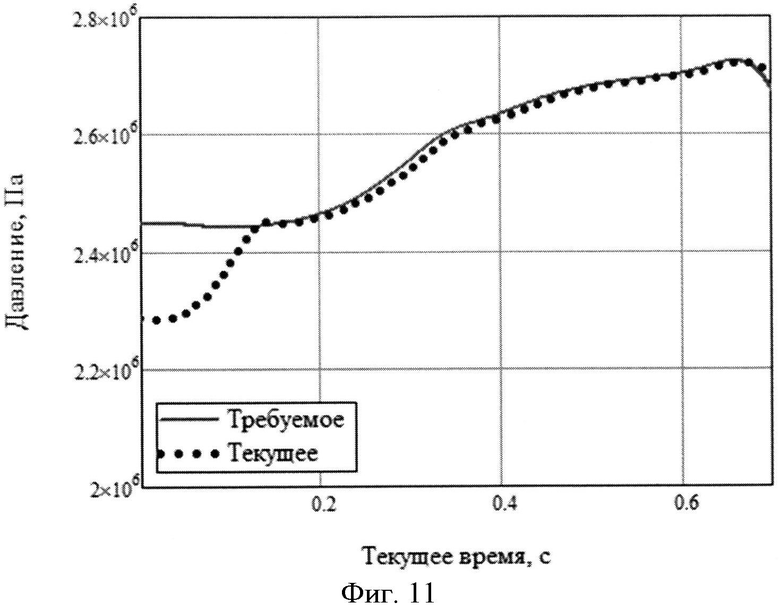
2. Имитация силы гидростатического давления, силы трения и силы продольного - аэрогидродинамического сопротивления (фиг. 11, 12).
3. Имитация всех гидродинамических сил, включая λ11 (фиг. 13, 14).
Расчеты показали, что в варианте 3 отличия Pцил(t) от
В варианте 2 отличие Pцил(t) от 
В варианте 1 отличие Pцил(t) от
Таким образом, в численном примере показано, что применение пневматической поршневой системы для имитации сил подводного старта обеспечивает достаточно высокую точность имитации и расширение возможностей наземной натурной отработки газодинамических процессов старта.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИМИТАЦИИ УСЛОВИЙ МИНОМЕТНОГО СТАРТА РАКЕТЫ ИЗ ПОДВОДНОЙ ЛОДКИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2482425C1 |
| СПОСОБ ИМИТАЦИИ УСЛОВИЙ СТАРТА РАКЕТЫ ИЗ ПОДВОДНОЙ ЛОДКИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2082936C1 |
| СПОСОБ СТАРТА РАКЕТ С ПОДВОДНОЙ ЛОДКИ, НАДВОДНЫХ КОРАБЛЕЙ И НАЗЕМНЫХ НОСИТЕЛЕЙ ИЗ НЕЗАТОПЛЕННОЙ ПУСКОВОЙ УСТАНОВКИ И ПУСКОВАЯ УСТАНОВКА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2536961C2 |
| КРЫЛАТАЯ РАКЕТА В ТРАНСПОРТНО-ПУСКОВОМ КОНТЕЙНЕРЕ | 2001 |
|
RU2215981C2 |
| СПОСОБ СОЗДАНИЯ АДАПТИВНОГО ТОРМОЖЕНИЯ ПОРШНЯ В ПНЕВМОЦИЛИНДРЕ | 2015 |
|
RU2605513C1 |
| СПОСОБ СТАРТА УПРАВЛЯЕМОЙ РАКЕТЫ ИЗ ТРАНСПОРТНО-ПУСКОВОГО КОНТЕЙНЕРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2240489C1 |
| СПОСОБ СТАРТА ЛЕТАТЕЛЬНОГО АППАРАТА С РАЗГОНОМ НА НАЧАЛЬНОМ УЧАСТКЕ ТРАЕКТОРИИ ПОЛЕТА | 1984 |
|
SU1840857A1 |
| ПУСКОВАЯ УСТАНОВКА ПОДВОДНОЙ ЛОДКИ | 2007 |
|
RU2349492C1 |
| ПУСКОВАЯ УСТАНОВКА ДЛЯ РАКЕТ МНОГОПОЯСНОГО ОПИРАНИЯ | 2012 |
|
RU2494334C1 |
| СПОСОБ НАЗЕМНОГО ИЛИ НАДВОДНОГО СТАРТА РАКЕТЫ С СИСТЕМОЙ УПРАВЛЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2096721C1 |
Изобретение относится к испытательной технике и может быть использовано для имитации старта ракеты из подводной лодки. Система имитации условий подводного старта ракеты из пусковой установки (ПУ) в наземных условиях содержит пусковую трубу на наземных силовых опорах с макетом ракеты с обтюрирующим поясом, датчиками перемещений, скорости и ускорения, аппаратуру управления, газогенератор, переходный отсек, опоры качения для движения макета ракеты по направляющим вдоль оси пусковой трубы, два силовых цилиндра пневматической поршневой системы с поршнями, штоками и длиной больше длины пусковой трубы, коллектор с входным и выходным с изменяющейся площадью поперечного сечения дросселем трубопроводами, баллон высокого давления, устройства измерения давления и температуры газа, систему замера площади отверстия дросселя. Создают силы на макет ракеты в зависимости от суммарной площади поперечного сечения пневмоцилиндров, площади поперечного сечения внутренней полости ПУ, глубины погружения, имитирующие гидростатическое давление воды на глубине старта, и силы продольного сопротивления и трения, запускают газогенератор, создают давление на днище макета ракеты и обтюрирующий пояс, замеряют текущие значения перемещения, скорости и ускорения макета ракеты, давления и температуры газа в рабочих полостях пневмоцилиндров, площадь отверстия дросселя, определяют величину требуемого давления газа в рабочих полостях пневмоцилиндров в зависимости от суммарной площади поршней в рабочих полостях пневмоцилиндров, площади поперечного сечения внутренней полости ПУ, расчетного значения коэффициента продольного гидродинамического сопротивления ракеты в зависимости от измеренного перемещения, присоединенной массы ракеты, сил трения опор и обтюратора макета ракеты при контакте с внутренними стенками ПУ, сравнивают величину измеренного давления с требуемым, изменяют величину площади отверстия дросселя для приведения давления к требуемому значению, выбрасывают макет ракеты из пусковой трубы. Изобретение позволяет повысить точность имитации газодинамических процессов старта ракеты из подводной лодки. 2 н. и 1 з.п. ф-лы, 14 ил. 
1. Способ имитации условий старта ракеты из пусковой установки подводной лодки в наземных условиях, включающий запуск газогенератора, создание давления на днище макета ракеты и обтюрирующий пояс, выброс макета ракеты из пусковой трубы, создание до запуска газогенератора силы, прикладываемой к макету ракеты в направлении, противоположном его движению, и имитирующей воздействие на ракету гидростатического давления воды на глубине старта, силу продольного сопротивления и силу трения, отличающийся тем, что создают с помощью пневматической поршневой системы силу, имитирующую воздействие на ракету гидростатического давления воды, повышая давление газа в пневмоцилиндрах до величины, определяемой по формуле:
где:
Sцил [м2] - суммарная площадь поперечного сечения пневмоцилиндров,
Sпу [м2] - площадь поперечного сечения внутренней полости пусковой установки,
ρ=1020 [кг/м3] - плотность морской воды,
g=9.81 [м/с2] - ускорение свободного падения,
H0 [м] - глубина погружения, отсчитываемая от верхнего сечения пусковой установки,
а после запуска газогенератора, начала движения макета ракеты и вытеснения через отверстие дросселя газов из пневмоцилиндров замеряют текущие значения перемещения x(t), скорости 



где:
Sцил [м2] - суммарная площадь поршней в рабочих полостях пневмоцилиндров,
Sпу [м2] - площадь поперечного сечения внутренней полости пусковой установки,
Сх(х(t)) - расчетное значение коэффициента продольного гидродинамического сопротивления ракеты в зависимости от измеренного перемещения x(t),
λ11 [кг] - присоединенная масса ракеты в направлении ее продольной оси,
Fтр [Н] - сила трения опор и обтюратора макета ракеты при контакте с внутренними стенками пусковой установки,
сравнивают величину измеренного давления Pцил(t) с требуемым 

2. Система имитации условий подводного старта ракеты из пусковой установки в наземных условиях, содержащая установленную на наземных силовых опорах пусковую трубу с размещенными внутри нее макетом ракеты с обтюрирующим поясом, газогенератором, сообщенным с заракетным объемом, переходной отсек, скрепленный с носовой частью макета ракеты и имеющий узлы для передачи имитирующих сил на макет ракеты, а также опоры качения для движения макета ракеты по направляющим вдоль оси пусковой трубы, отличающаяся тем, что
на наземных силовых опорах установлены два силовых цилиндра пневматической поршневой системы, оси которых параллельны продольной оси пусковой установки, каждый силовой пневмоцилиндр снабжен поршнем и штоком, надпоршневые рабочие полости силовых пневмоцилиндров соединены между собой коллектором, который оборудован входным и выходным трубопроводами, входной трубопровод через отсечной клапан соединен с баллоном высокого давления для зарядки пневматической поршневой системы, а выходной трубопровод оборудован дросселем с регулируемым отверстием для выпуска газов из рабочих полостей пневмоцилиндров и снабжен устройством для изменения величины площади поперечного сечения дросселя с помощью управляемого привода, пневмоцилиндры оборудованы устройствами измерения давления и температуры газа внутри рабочих объемов пневмоцилиндров и системой замера площади отверстия дросселя, а макет ракеты снабжен датчиками перемещений, скорости и ускорения макета ракеты, соединенными с аппаратурой управления.
3. Система по п. 2, отличающееся тем, что длина каждого силового цилиндра больше, чем длина пусковой трубы.
| СПОСОБ ИМИТАЦИИ УСЛОВИЙ СТАРТА РАКЕТЫ ИЗ ПОДВОДНОЙ ЛОДКИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2082936C1 |
| Устройство для разгрузки железнодорожных, состоящих из платформ, балластных составов | 1949 |
|
SU88803A1 |
| US 3295411 A1, 03.01.1967 | |||
| US 3075301 A1, 29.01.1963. | |||

