Изобретение относится к области машиностроения и может быть использовано в роторных машинах, к которым предъявляются повышенные требования по быстроходности, виброустойчивости, возможности функционировать на закритических режимах при многократных пусках машины.
Наиболее близким решением к заявленному изобретению является гидростатическая упруго-демпфирующая опора, содержащая втулку, на которой по окружности выполнены расположенные против впадин и изолированные одна от другой выступами гофрированного пакета камеры, имеющие отверстия для сообщения с полостью высокого давления гидросистемы. Опора может быть снабжена крышкой, втулка выполнена с фланцем, обращенным к подшипнику, между фланцем втулки и подшипником, а также крышкой и подшипником по торцам установлены уплотнения, а полость, образованная втулкой, крышкой и гофрированным пакетом, сообщена с внутренней полостью подшипника (см. авт. свид. №443214, кл. F16f 3/06, опубл. 1974).
Недостатками являются уменьшение КПД, а также высокие амплитуды колебаний при использовании пластинчатого гофрированного демпфера.
Задача, на решение которой направлено изобретение, состоит в улучшении динамики системы «ротор-опора», в сужении области неустойчивости и в обеспечении ее прохождения при приемлемых амплитудах колебаний, в повышении долговечности опорного узла в целом при неизменных габаритах, расширении области применения данного типа опор.
Поставленная задача достигается тем, что в упругодемпферной опоре ротора с активным управлением, содержащей корпус, размещенный в нем подшипник и расположенный между ними демпфер, согласно изобретению, в демпфере установлен датчик виброперемещений, соединенный через аналогово-цифровой преобразователь, микроконтроллер и цифроаналоговый преобразователь с исполнительным пьезомеханизмом поступательного движения, связанным с поджимным кольцом, установленным с возможностью включения и выключения демпфера из работы.
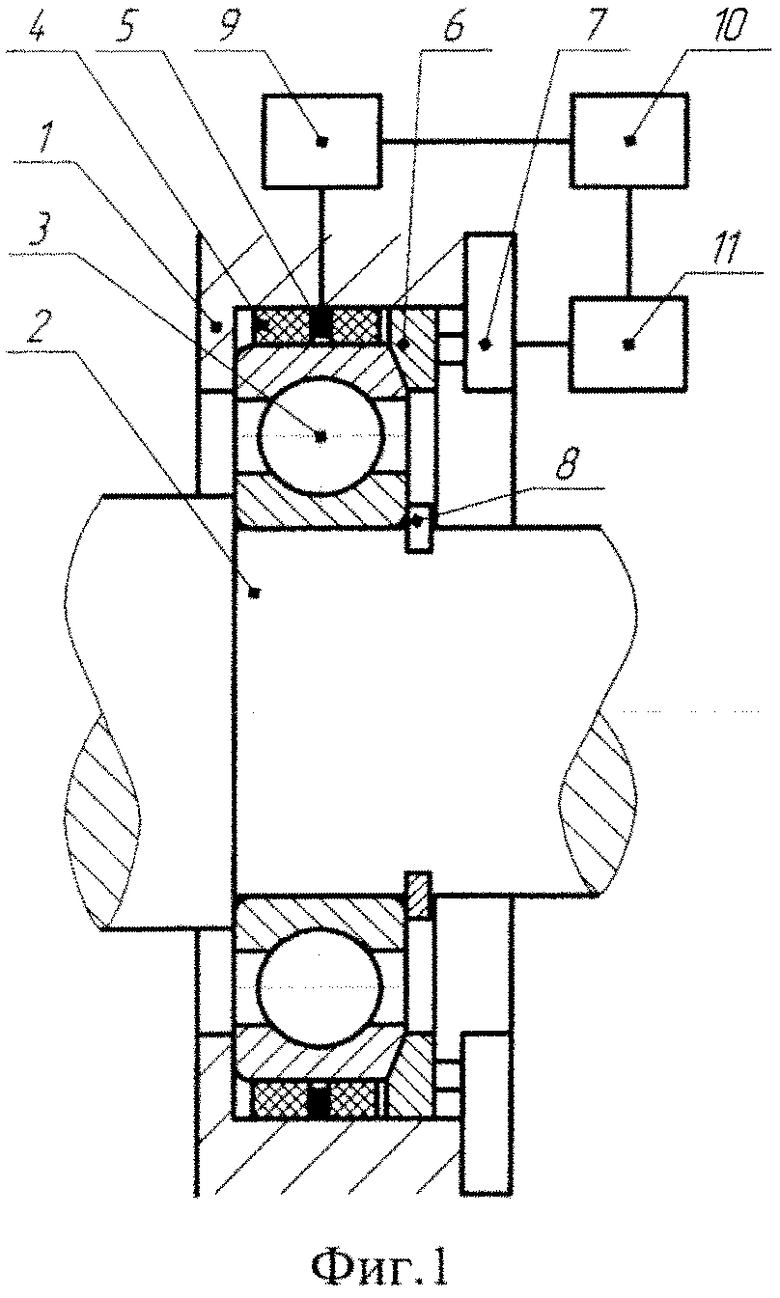
На фиг.1 изображена опора ротора с выключенным демпфером, на фиг.2 изображена опора ротора с включенным демпфером.
Упругодемпферная опора ротора содержит корпус 1, вал 2 с размещенным на нем подшипником 3 качения, демпфер 4, в котором установлен датчик 5 виброперемещений. Движение поджимного кольца 6 обеспечивает закрепленный на корпусе 1 исполнительный пьезомеханизм 7 поступательного движения. Подшипник 3 качения фиксируется на валу 2 при помощи стопорного кольца 8. Сигнал с датчика 5 виброперемещений через аналогово-цифровой преобразователь 9 передается на микроконтроллер 10, задающий через цифроаналоговый преобразователь 11 направление поступательного движения в исполнительном пьезомеханизме 7.
Устройство работает следующим образом (см. фиг.1). При запуске ротора опора функционирует с выключенным демпфером, где вал 2 опирается на подшипник 3 качения, фиксируемый стопорным кольцом 8 в корпусе 1. При достижении определенного значения частоты вращения вала 2, близкой к критической, возникают колебания, фиксируемые датчиком 5 виброперемещений 5, в результате чего сигнал через аналогово-цифровой преобразователь 9 передается на микроконтроллер 10, задающий через цифроаналоговый преобразователь 11 направление поступательного движения в исполнительном пьезомеханизме 7, осуществляющем движение поджимного кольца 6. После отжатия поджимного кольца (см. фиг.2) включается в работу демпфер 4, позволяющий валу 2 пройти критическую частоту вращения, снизить динамические перегрузки, добиться сужения зоны неустойчивости и переход через нее. При уменьшении скорости вращения все процессы происходят в обратном порядке.
В качестве демпфера могут быть применены демпферы сухого трения (упругие кольца, упругие втулки), гидродинамические демпферы.
Исполнительный пьезомеханизм 7 поступательного движения закреплен на корпусе 1 опоры, внутри которого пьезоэлемент прямого действия и толкатель, в результате подачи напряжения на пьезоэлемент происходит его деформация, которая обеспечивает прижатие поджимного кольца 6.
Радиальная сила, воспринимаемая подшипником 3 качения, будет проходить через конические поверхности, образованные внешним кольцом пошипника 3 и поджимным кольцом 6. Часть силового потока будет передаваться через торец внешнего кольца подшипника 3 в результате осевого поджатая к корпусу.
Необходимая сила прижатия кольца находится из условия непроскальзывания, а именно сила прижатия и обеспеченная ею сила трения на торцах подшипника должны быть больше момента трения подшипника качения.
Технический результат заключается в увеличении КПД, надежности и долговечности опоры ротора за счет включения и выключения демпфера на разных режимах вращения вала.
| название | год | авторы | номер документа |
|---|---|---|---|
| УПРУГОДЕМПФЕРНАЯ ОПОРА РОТОРА | 1989 |
|
RU1619808C |
| Упругая опора подшипника качения высокооборотного ротора | 2017 |
|
RU2672516C1 |
| УПРУГОДЕМПФЕРНАЯ ОПОРА РОТОРА | 2001 |
|
RU2225954C2 |
| ТУРБИНА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 1991 |
|
RU2028460C1 |
| УПРУГОДЕМПФЕРНАЯ ОПОРА РОТОРА ТЯЖЕЛОЙ ТУРБОМАШИНЫ | 2014 |
|
RU2592664C2 |
| УПРУГОДЕМПФЕРНАЯ ОПОРА РОТОРА ТУРБОМАШИНЫ | 2014 |
|
RU2579646C1 |
| УПРУГОДЕМПФЕРНАЯ ОПОРА РОТОРА ТУРБОМАШИНЫ | 2013 |
|
RU2525373C1 |
| УПРУГОДЕМПФЕРНАЯ ОПОРА РОТОРА ТУРБОМАШИНЫ С ДЕМПФЕРОМ С ДРОССЕЛЬНЫМИ КАНАВКАМИ | 2014 |
|
RU2583206C1 |
| УПРУГОДЕМПФЕРНАЯ ОПОРА РОТОРА ТУРБОМАШИНЫ С ДЕМПФЕРОМ С ДРОССЕЛЬНЫМИ КАНАВКАМИ | 2014 |
|
RU2572444C1 |
| УПРУГОДЕМПФЕРНАЯ ОПОРА | 2002 |
|
RU2237204C2 |

Изобретение относится к области машиностроения. Опора содержит корпус, подшипник и демпфер. Подшипник размещен в корпусе. Демпфер расположен между корпусом и подшипником. Датчик виброперемещений установлен в демпфере. Датчик соединен через аналогово-цифровой преобразователь, микроконтроллер и цифроаналоговый преобразователь с исполнительным пьезомеханизмом. Пьезомеханизм связан с поджимным кольцом. Кольцо установлено с возможностью включения и выключения демпфера из работы. Достигается увеличение надежности и долговечности опоры ротора. 2 ил.
Упругодемпферная опора ротора с активным управлением, содержащая корпус, размещенный в нем подшипник и расположенный между ними демпфер, отличающаяся тем, что в демпфере установлен датчик виброперемещений, соединенный через аналогово-цифровой преобразователь, микроконтроллер и цифроаналоговый преобразователь с исполнительным пьезомеханизмом поступательного движения, связанным с поджимным кольцом, установленным с возможностью включения и выключения демпфера из работы.
| Гидростатическая упруго-демпфирующая опора | 1972 |
|
SU443214A1 |
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| СОСТАВ ДЛЯ СЖИГАНИЯ БИОЛОГИЧЕСКИХ МАТЕРИАЛОВ В ПОЛЕВЫХ УСЛОВИЯХ | 1992 |
|
RU2034200C1 |
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |

