Изобретение относится к области авиации, в частности винтокрылым летательным аппаратам - автожирам, вертолетам, конвертопланам и преобразуемым аппаратам.
Наиболее распространенным способом создания подъемной силы и силы тяги вертолета является схема с устанавливаемым над фюзеляжем большим несущим винтом, который вращается двигателями с помощью механического привода (Энциклопедия "Авиация", М., 1994, ст. "Винтокрылый летательный аппарат", сс.138-139).
Основные недостатки - необходим дополнительный хвостовой винт, создающий силу тяги, момент которой противоположен крутящему моменту, порождаемому несущим винтом, и препятствует вращению фюзеляжа, кроме того, требуется сложная и тяжелая трансмиссия для передачи усилий от силовой установки винту.
Этих недостатков практически лишены вертолеты с реактивным приводом несущего винта - с реактивными двигателями или с реактивными соплами на концах лопастей (Энциклопедия "Авиация", М., 1994, ст. "Реактивный привод несущего винта", сс. 474-475; Якубович Н.В. "Вертолеты особых схем", М., изд-во ACT, 2002 г., сс. 40-49).
С другой стороны, у вертолетов с реактивным приводом несущего винта резко усложняется посадка на авторотации, так как при отключении двигателей большое лобовое сопротивление двигателей и сопел быстро замедляет вращение несущего винта, кроме того, возникают более высокие уровни шума и большая заметность от факелов двигателей (Энциклопедия "Авиация", М., 1994, ст. "Реактивный привод несущего винта", сс. 474-475).
Наиболее близким аналогом является устройство реактивного привода несущего винта единственного серийно выпускавшегося вертолета Sud-Quest SO. 1221 Djinn, выполненного по компрессорной схеме, т.е. двигатель вырабатывает сжатый воздух, который далее подводится к соплам на концах лопастей (Энциклопедия "Авиация", М., 1994, ст. "Реактивный привод несущего винта", с. 474-475).
Задачей и техническим результатом изобретения является увеличение подъемной силы винта вертолета при одинаковой с аналогами площади лопастей и скорости вращения винта, а также уменьшение лобового сопротивления сопел, вращающих несущий винт, особенно на режимах авторотации.
Решение поставленной задачи и технический результат достигаются тем, что в способе управления реактивным приводом несущего винта вертолета, заключающемся в получении сжатого газа с помощью силовой установки и компрессора, транспортировке его к соплам, установленным на лопастях, и создании реактивных сил, вращающих винт, для обеспечения составляющих подъемной и реактивной силы выдувают струи газа из щелевых сопел, расположенных на задней кромке лопастей, под углом α≤45° относительно плоскости, проходящей через продольную ось и хорду профиля ее поперечного сечения, и вниз перпендикулярно вышеуказанной плоскости из щелевых сопел, расположенных на линии максимальных относительных толщин профиля поперечных сечений лопасти, а управление силами, возникающими на наступающей и отступающей лопастях вертолета, осуществляют с помощью клапанов, изменяя давление газа в щелевых соплах.
Решение поставленной задачи и технический результат достигаются также тем, что устройство управления реактивным приводом несущего винта вертолета, имеющее силовую установку и компрессор для получения газа высокого давления, систему транспортировки сжатого газа к соплам, сопла для получения вращающей лопасть реактивной тяги, содержит на задних кромках лопастей щелевые сопла, установленные под углом α≤45° относительно плоскости, проходящей через продольную ось и хорду профиля ее поперечного сечения, а также щелевые сопла, расположенные на линии максимальных относительных толщин профиля поперечных сечений лопасти, оси которых направлены вниз перпендикулярно вышеуказанной плоскости, и клапаны для регулирования величины давления газа в щелевых соплах.
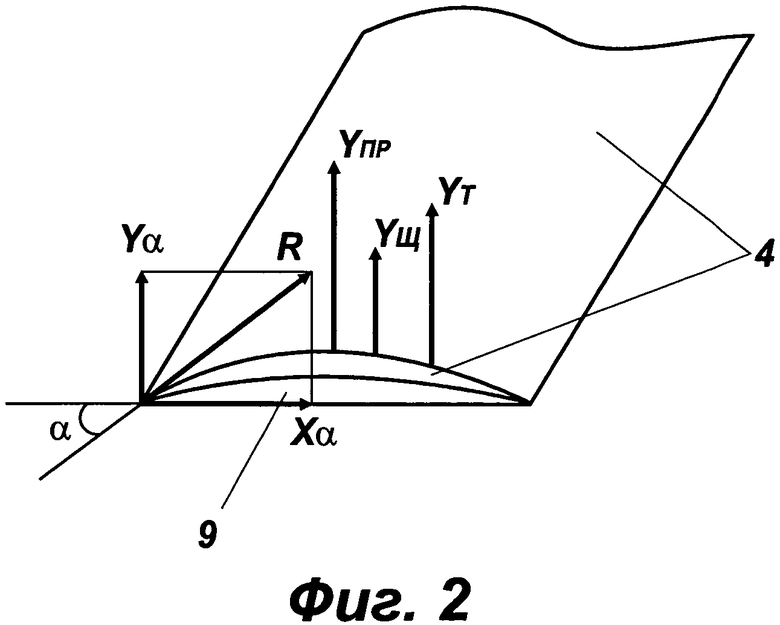
На фиг. 1 приведена схема устройства для реализации предложенного способа управления реактивным приводом несущего винта вертолета.
На фиг. 2 представлена схема действующих на лопасть сил.
Для простоты приведены только две лопасти винта, как известно, общее число лопастей существующих вертолетов варьируется от 2 до 8.
Все изложенное справедливо для любого профиля лопасти - рассмотрим, например, симметричный вогнутовыпуклый профиль (фиг. 1).
Устройство состоит из силовой установки 1, компрессора 2, втулки несущего винта 3, лопастей 4, трубопроводов 5, регулировочных клапанов 6, щелевых сопел 7, длинная сторона которых располагается вдоль задней кромки лопасти, щелевых сопел 8, длинная сторона которых располагается вдоль линии максимальных относительных толщин профиля поперечных сечений лопасти, ребер прочности 9.
Реализацию способа продемонстрируем на примере работы приведенного устройства. Силовая установка 1 вращает компрессор 2, который вырабатывает газ высокого давления и транспортирует его через втулку несущего винта 3 в лопасти 4, и далее трубопроводами 5 с регулировочными клапанами 6 в щелевые сопла 7 для создания вращающей винт реактивной силы и подъемной силы и в щелевые сопла 8 для создания подъемной силы. Для увеличения прочности лопасти, по крайней мере, на ее концах устанавливают ребра прочности 9, которые одновременно препятствуют перетеканию заторможенного воздуха с нижней поверхности лопасти из зоны повышенного давления.
Струи газа высокого давления, истекающие из щелевых сопел 7, расположенных вдоль задней кромки лопасти под углом α≤45° относительно плоскости, проходящей через продольную ось и хорду профиля лопасти, вращают лопасти 4 и создают дополнительную подъемную силу.
На фиг. 1 обозначены направления струй X1, Х2,…,Хn, истекающих из щелевых сопел 7, и результирующая тяга R, составляющая угол α≤45° относительно вышеуказанной плоскости. Составляющие Хα=Rcosα и Yα=Rsinα результирующей тяги R соответственно вращают лопасти 4 и создают дополнительную подъемную силу (фиг. 2).
Расположенные на линии максимальной относительной толщины профиля лопасти щелевые сопла 8, из которых истекают струи газа высокого давления вниз перпендикулярно вышеуказанной плоскости, направление которых обозначено как Y1, Y2,…,Ym, дают реактивную составляющую подъемной силы Yщ.
После начала вращения лопастей струями Χ1, Х2,…,Хn поперечные струи Y1, Y2,…,Ym тормозят натекающий на них поток, создавая зону повышенного давления на нижней поверхности лопастей в области от передней кромки до линии максимальной относительной толщины профиля. Стационарный режим вращения лопасти наступает, когда его аэродинамическое сопротивление уравновешивается реактивной тягой, вращающей лопасть.
Зона повышенного давления дает составляющую YТ, которая увеличивает подъемную силу лопасти (фиг. 2).
В результате полная подъемная сила лопасти YП складывается из 4-х составляющих:
YП=Yα+Yщ+YТ+YПР,
где YΠΡ - условная составляющая подъемной силы, получаемая при аэродинамическом обтекании профиля лопасти набегающим воздушным потоком (фиг. 2).
Размеры и количество щелевых сопел, давления и скорость истечения газа выбираются так, чтобы обеспечить требуемые реактивную силу вращения лопасти и подъемную силу для конкретного вертолета.
Возможно также отключение с помощью регулировочных клапанов 6 щелевых сопел 7 или части сопел 8 для выравнивания величины подъемной силы на наступающей и отступающей лопастях винта, а также регулирование величины давления в соплах, расположенных на соответствующих лопастях. Управление клапанами осуществляют с помощью системы управления через бортовой компьютер или вручную.
Достижение технического результата основано на том, что в предлагаемом способе и устройстве для увеличения подъемной силы лопасти действуют три дополнительных источника подъемной силы Yα, Yщ, YТ, которые отсутствуют в прототипе. Надо отметить, что при наличии достаточной мощности силовой установки и компрессора эти компоненты подъемной силы могут продолжать расти даже тогда, когда составляющая подъемной силы Yпр выходит на свой максимальный уровень и перестает расти. Это позволяет увеличить максимальную высоту подъема или вес полезной нагрузки летательного аппарата.
Щелевые сопла - это сопла с прямоугольным выходным сечением, имеющие увеличенную степень "сплюснутости", т.е. большую величину отношения ширины bc к высоте hc выходного сечения bc/hc=3÷15.
Щелевые сопла имеют меньшее лобовое сопротивление по сравнению с прототипом, где применяются одиночные сопла с большой площадью выходного сечения, установленные на концах лопастей. Так как высота щелевого сопла фактически совпадает с толщиной профиля на передней или задней кромках лопастей, они не создают дополнительного аэродинамического сопротивления. Это особенно важно на режимах авторотации.
Для регулирования силы тяги и подъемной силы могут параллельно применяться автоматы перекоса, которые используются в традиционных вертолетах, в которых несущий винт вращается двигателями с помощью механического привода.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО РЕАКТИВНОГО ПРИВОДА НЕСУЩЕГО ВИНТА | 2020 |
|
RU2748769C1 |
| ПРЕОБРАЗУЕМЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ (ВАРИАНТЫ) | 2014 |
|
RU2550589C1 |
| СТРУЙНО-ЩЕЛЕВАЯ ЛОПАСТЬ (ВАРИАНТЫ) | 2007 |
|
RU2362707C2 |
| МНОГОЦЕЛЕВОЙ ВЫСОКОСКОРОСТНОЙ САМОЛЕТ-ВЕРТОЛЕТ | 2017 |
|
RU2673317C1 |
| СВЕРХЗВУКОВОЙ МАЛОЗАМЕТНЫЙ САМОЛЕТ-ВЕРТОЛЕТ | 2018 |
|
RU2692742C1 |
| МАЛОЗАМЕТНАЯ АВИАЦИОННО-РАКЕТНАЯ СИСТЕМА | 2019 |
|
RU2725372C1 |
| Самолет-вертолет | 2023 |
|
RU2829109C1 |
| БЕСПИЛОТНЫЙ МАЛОЗАМЕТНЫЙ САМОЛЕТ-ВЕРТОЛЕТ | 2018 |
|
RU2686574C1 |
| СПОСОБ КОМПЕНСАЦИИ РЕАКТИВНОГО МОМЕНТА НЕСУЩЕГО ВИНТА | 2012 |
|
RU2514010C1 |
| СКОРОСТНОЙ ТУРБОВЕНТИЛЯТОРНЫЙ ВИНТОКРЫЛ | 2016 |
|
RU2629475C1 |
Изобретение относится к области авиации, в частности к конструкциям винтокрылых летательных аппаратов. Способ управления реактивным приводом несущего винта вертолета заключается в получении сжатого газа с помощью силовой установки и компрессора, транспортировке его к щелевым соплам, расположенным на линии максимальных относительных толщин профиля поперечных сечений лопасти на задних кромках лопастей под углом α≤45° относительно плоскости, проходящей через продольную ось лопасти и хорду профиля ее поперечного сечения и вниз перпендикулярно вышеуказанной плоскости. Управление силами, возникающими на наступающей и отступающей лопастях вертолета, осуществляют с помощью клапанов, изменяя давление газа в щелевых соплах. Устройство управления реактивным приводом несущего винта вертолета содержит силовую установку и компрессор для получения газа высокого давления, систему транспортировки сжатого газа в полости винта, щелевые сопла, установленные на линии максимальных относительных толщин профиля поперечных сечений лопасти на задних кромках лопастей под углом α≤45° относительно плоскости, проходящей через продольную ось и хорду профиля ее поперечного сечения. Достигается увеличение подъемной силы несущего винта. 2 н.п. ф-лы, 2 ил.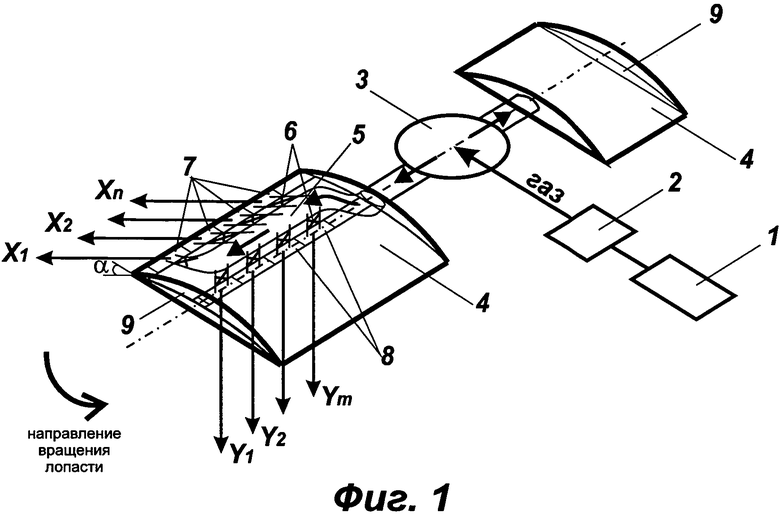
1. Способ управления реактивным приводом несущего винта вертолета, заключающийся в получении сжатого газа с помощью силовой установки и компрессора, транспортировке его к соплам, установленным на лопастях, и создании реактивных сил, вращающих винт, отличающийся тем, что реактивную силу и дополнительные составляющие подъемной силы создают, выдувая струи газа из щелевых сопел, расположенных на задних кромках лопастей, под углом α≤45° относительно плоскости, проходящей через продольную ось лопасти и хорду профиля ее поперечного сечения и вниз перпендикулярно вышеуказанной плоскости из щелевых сопел, расположенных на линии максимальных относительных толщин профиля поперечных сечений лопасти, а управление силами, возникающими на наступающей и отступающей лопастях вертолета, осуществляют с помощью клапанов, изменяя давление газа в щелевых соплах.
2. Устройство управления реактивным приводом несущего винта вертолета, содержащее силовую установку и компрессор для получения газа высокого давления, сопла для получения вращающей лопасть реактивной тяги и систему транспортировки сжатого газа к соплам, отличающееся тем, что на задних кромках лопастей установлены щелевые сопла под углом α≤45° относительно плоскости, проходящей через продольную ось и хорду профиля ее поперечного сечения, а также щелевые сопла, расположенные на линии максимальных относительных толщин профилей поперечных сечений лопасти, оси которых направлены вниз перпендикулярно вышеуказанной плоскости, и клапаны для регулирования величины давления газа в щелевых соплах.
| СТРУЙНО-ЩЕЛЕВАЯ ЛОПАСТЬ (ВАРИАНТЫ) | 2007 |
|
RU2362707C2 |
| US 3588273 A, 28.06.1971 | |||
| RU 2059536 C1, 10.05.1996 | |||
| US 5149014 A, 22.09.1992. | |||

