Изобретение относится к области авиационной техники и может быть использовано в конструкции палубных беспилотных малозаметных самолетов-вертолетов с двумя несущими винтами (НВ), используемыми только при вертикальном и коротком взлете/посадке (ВВП и КВП), и двумя подъемно-маршевыми турбореактивными двигателями с управляемым вектором тяги и отбором мощности на привод двух НВ, смонтированных на концах поворотных профилированных кронштейнов, позволяющих после их поворота укладывать НВ по обе стороны от оси симметрии в боковые внешние ниши с автоматически открываемыми продольными створками в межкрыльных гондолах для горизонтального полета на транс- или сверхзвуковых скоростях.
Известен самолет вертикального взлета и посадки (СВВП) F-35V (США), содержащий высокорасположенное крыло, консоли которого снабжены боковыми соплами, создающими наравне с передним подъемным вентилятором вертикальную тягу, имеет турбореактивный двухконтурный двигатель (ТРДД) с соплом, изменяющим вектор реактивной тяги, и отбором мощности на привод подъемного вентилятора с поворотными створками, хвостовое оперение с двумя отклоненными килями наружу.
Признаки, совпадающие - комбинированная силовая установка СВВП включает форсажный ТРДД, созданный на базе ТРДД модели F119, имеет модуль основного поворотного сопла (Three-Bearing Swivel Module), муфту сцепления, приводной вал, редуктор привода подъемного вентилятора D=1,28 м и расположенные в крыле возду-хоотводящие каналы с соплами, обеспечивающими возможность подъема и управления СВВП по крену. На режиме ВВП 30% от взлетной 72000 л.с.мощности ТРДД передается к продольному валу. Вал входит в муфту, и при зацеплении муфта соединяет продольный вал с редуктором подъемного вентилятора, который способен, отобранную от ТРДД тягу 6750 кгс, преобразовывать в мощность в 21600 л.с. и создавать им подъемную тягу 89 кН. В состав ТРДД входит реактивное сопло с управляемым вектором тяги, которое поворачивается для направления выходящей из сопла струи газов назад вдоль оси СВВП или вниз, создавая тягу почти 72 кН, при ВВП, а выходящий при этом из подъемного вентилятора поток воздуха с регулируемыми створками, которые придают воздушному потоку нужное продольное направление. Каналы с соплами управления по крену получают воздух от ТРДД и создают 17 кН подъемной тяги.
Причины, препятствующие поставленной задаче: первая - это то, что заднее расположение ТРДД с его поворотным соплом, изменяющим вектор реактивной тяги, имеет для отбора взлетной его мощности передний вывод вал посредством редуктора и муфты сцепления на подъемный вентилятор, что предопределяет за кабиной пилота в конструкции фюзеляжа две верхнюю и нижнюю раскрываемые створки подъемного вентилятора, оснащенного также сложной системой отклонения его воздушного потока в продольном направлении, что усложняет конструкцию. Вторая - это то, что боковые подкрыльные сопла с увеличением угла атаки крыла на переходных режимах полета создают опасность появления на крыле срыва потока до создания подъемным вентилятором и поворотным соплом ТРДД необходимой подъемной силы, что снижает надежность и поперечную управляемость. Третья - это то, что для выполнения ВВП и зависания имеется двойная система создания вертикальной тяги и продольно-поперечной подъемной силы (подъемный вентилятор с поворотным соплом ТРДД и боковые сопла), что неизбежно ведет к утяжелению и усложнению конструкции, но и уменьшению весовой отдачи, так как при горизонтальном его полете боковые сопла и подъемный вентилятор, увеличивая паразитную массу, бесполезны. Кроме того, использование форсажного ТРДД при ВВП повышает удельный расход топлива на 46% и ухудшает показатели дальности полета и топливной эффективности. А использование бесфорсажного режима ТРДД ограничивает скорость полета до 950 км/ч.
Известен палубный СВВП мод. S-57 компании Sikorsky (США) проекта XV-2, имеющий высокорасположенное крыло, останавливаемый и убираемый в продольный отсек верхней части фюзеляжа однолопастной несущий винт с противовесом, снабженным реактивным соплом, струйной системой и воздуховодом от турбореактивного двигателя (ТРД) комбинированной силовой установки (СУ), содержит подкрыльное двухкилевое хвостовое оперение и трехопорное убирающееся колесное шасси.
Признаки, совпадающие - наличие ниши в верхней части фюзеляжа с НВ, создающим только вертикальную тягу, имеющим струйную систему с воздуховодом, проложенным внутри колонки вала НВ и обеспечивающим равномерный отбор мощности ТРД, воздух которого, направляясь к реактивному соплу НВ, будет его вращать и создавать подъемную силу. Особенностью конструкции СВВП проекта XV-2 - концепция Control Circulation Rotor (CCR), т.е. ротор с регулируемой циркуляцией и неподвижное его размещение в фюзеляже: при переходе в самолетный режим полета останавливался однолопастной НВ, имеющий узлы складывания колонки вала и фиксирования лопасти, которые укладывались по оси симметрии в нишу фюзеляжа.
Причины, препятствующие поставленной задаче: первая - это то, что размещение на верхней части фюзеляжа останавливаемого и убираемого НВ, имеющего автомат перекоса его лопасти с управлением его общего и циклического изменения его шага, что предопределяет конструктивно сложную складываемую колонку его вала и противовес с воздуховодами, что усложняет конструкцию и уменьшает надежность, но и значительно увеличивает габаритные размеры по высоте с вращающимся НВ. Вторая - это то, что диаметр НВ ограничен длиной фюзеляжа и как, следствие, при висении поток от НВ, обдувая консоли крыла и создавая значительную общую потерю (≈34%) в вертикальной их тяге, затормаживается и большие скорости потока отбрасываемого от них предопределяют образование вихревых колец, которые на низких скоростях снижения могут резко уменьшать силу тяги НВ и создавать ситуацию неуправляемого падения, что снижает стабильность управления и безопасность. Третья - это то, что однодвигательная СУ включает ТРД избыточной мощности, используемой при выполнении ВВП на 100%, что весьма снижает наработку на отказ и надежность, особенно, при его отказе, а расположение под дельтовидным крылом вертикальных килей, имеющих на их законцовках обтекатели с задними колесами шасси, что предопределяет, повышая аэродинамическое сопротивление, ограничения в достижении скорости до 745 км/ч. Все это также ограничивает возможность уменьшения массы конструкции планера с однолопастным НВ, имеющим автомат перекоса, а также дальнейшего улучшения весовой отдачи и повышения полезной нагрузки.
Наиболее близким к предлагаемому изобретению является СВВП компании Hawker Siddeley (Великобритания) проекта HS.141, содержащий стреловидное крыло, составную силовую установку с подъемными реактивными двигателями в обтекателях по бортам фюзеляжа и маршевыми реактивными двигателями на подкрыльных пилонах, имеет хвостовое оперение и трехопорное убирающееся колесное шасси.
Признаки, совпадающие - в данном реактивном СВВП по восемь двигателей расположены в нижних обтекателях с каждого борта фюзеляжа: четыре перед передней и четыре за задней кромкой стреловидного крыла. В составной силовой установке имеется две группы двигателей: два маршевых турбовентиляторных двигателя Rolls-Royce RB.220 тягой по 12250 кгс и 16 подъемных турбовентиляторных двигателей Rolls-Royce RB.202 тягой по 4670 кгс. Подъемные двигатели имеют воздухозаборники с впускными и выпускными створками и снабжены реактивными соплами с дефлекторами, которые при выполнении ВВП могут отклоняться на 15° вперед или назад по полету, придавая реактивному потоку газов нужное продольное направление.
Причины, препятствующие поставленной задаче: первая - это то, что каждый подъемный двигатель RB.202 имеет наружный диаметр 1,5 м при его длине 1,15 м и со степенью двухконтурности 9,5:1, а их групповое расположение по бортам фюзеляжа предопределяет наличие с каждой стороны фюзеляжа развитых обтекателей, увеличивающих ширину нижней части фюзеляжа почти вдвое, что усложняет конструкцию, увеличивает аэродинамическое сопротивление и ограничивают скорость полета до 695 км/ч. Вторая - это то, что возможное осложнение возникает в связи с необходимостью разработки защиты от возможных сбоев системы управления при отказе любого из подъемных двигателей во время выполнения ВВП и зависания, приводящих к асимметричности тяги, что потребуют немедленной остановки его противолежащего двигателя по другую сторону СВВП. Такие силы вполне могут быть усугублены любым изменением, которое из-за скорости реакции необходимой в ситуации такого рода приводит к усложнению автоматической системы управления и необходимости проверки каждого двигателя на отказ при принятии соответствующих мер, чтобы сохранить контроль и стабильность управления. Третья - это то, что для выполнения ВВП, переходных и крейсерских режимов полетов имеется двойная раздельная система создания вертикальной и горизонтальной тяги соответственно подъемными и маршевыми двигателями при выполнении ВВП и горизонтального полета, что неизбежно ведет к утяжелению конструкции планера, увеличению объема регламентных работ, но и уменьшению весовой отдачи, так как при горизонтальном его полете сами подъемные двигатели, увеличивая паразитную массу, бесполезны, а при выполнении ВВП и зависания также и маршевые двигатели не используются. Все это приводит к увеличению удельного расхода топлива и ограничивает возможность повышения дальности полета более 724 км, а также показателей топливной эффективности менее 2054,77 г/т⋅км при целевой нагрузке 10,2 тонн.
Предлагаемым изобретением решается задача в указанном выше известном СВВП проекта HS.141 фирмы Hawker Siddeley увеличение целевой нагрузки и весовой отдачи, уменьшение инфракрасной и визуальной заметности, увеличение скорости и дальности полета, повышение транспортной и топливной эффективности при самолетных режимах полета как на транс- или сверхзвуковых скоростях полета.
Отличительными признаками предлагаемого изобретения от указанного выше известного СВВП проекта HS.141 фирмы Hawker Siddeley, наиболее близкого к нему, являются наличие того, что он снабжен на концах левого и правого поворотных профилированных кронштейнов (ППК), позволяющих после их поворота в горизонтальной плоскости как укладывать соответствующие несущие винты (НВ) в боковые внешние ниши (БВН) с соответствующих бортов межкрыльных гондол (МКГ) для горизонтального полета при зафиксированных и уложенных в них поперечных НВ, так и после выдвижения ППК из МКГ использовать левый и правый НВ, вращающиеся соответственно по часовой и против часовой стрелки, только при выполнении вертикального и короткого взлета/посадки (ВВП и КВП) или на переходных и барражирующих режимах полета, но и оснащен двумя подъемно-маршевыми турбореактивными двухконтурными двигателями (ТРДД) с управляемым вектором тяги (УВТ) и отбором мощности на привод НВ как для создания подъемной силы и управляющих моментов по тангажу, крену и курсу при выполнении ВВП и зависания, так и реактивной тяги при горизонтальном полете в конфигурации транс- или сверхзвукового самолета после остановки однолопастных НВ, втягивания их противовесом и фиксации лопастей вдоль ППК, размещаемых после их поворота назад по полету параллельно оси симметрии внутри МКГ в их БВН, имеющих нижнюю и верхнюю продольные створки, открывающиеся на режимах ВВП и зависания наружу от внешних бортов удобообтекаемых МКГ с обеспечением после выдвижения ППК с НВ из их БВН свободное вращение НВ с их выдвинутыми телескопическими противовесами перед БВН с закрытыми створками и между внешних секций среднерасположенного крыла с Х-образной стреловидностью (ХОС) в плане, корневые части которого с наплывами смонтированы над подкрыльными боковыми воздухозаборниками ТРДД, имеющими конструкцию их каналов с двойной S-образностью при виде и сверху, и с боку, и выполнен с возможностью преобразования полетной его конфигурации после выполнения технологии КВП или ВВП с винтокрыла или вертолета двухвинтовой несущей схемы с УВТ каждого ТРДД в соответствующий высокоскоростной винтокрыл или крылатый автожир при максимальном или нормальном взлетном весе соответственно с НВ, работающими на режимах близких к их авторотации или при авторотирующих НВ, увеличивающих несущую способность крыла ХОС с обеспечением режима барражирующего полета, но и обратно, при этом в передней части каждой надкрыльной части мотогондолы над входным устройством ТРРД имеется продольные автоматически открываемые створки для доступа дополнительного потока воздуха для работы ТРРД на режимах ВВП и зависания, причем скошенные боковые стороны как верхней и нижней частей фюзеляжа с уплощенной носовой его частью, так и подкрыльных и надкрыльных частей воздухозаборников и мотогондол, уменьшая эффективную площадь рассеивания, образуют соответственно шестигранное поперечное сечение и граненные конфигурации при виде спереди с острой линией непрерывно распространяющейся от носа до хвоста, включая верхние поверхности крыла ХОС, имеющего клиновидный профиль, первое и второе крыло соответственно обратной и прямой стреловидности с внешними секциями, смонтированными сверху и от внешних бортов подкрыльных МКГ соответственно с положительным и отрицательным углами их поперечного V, образующими при виде спереди левую и правую V-образные конфигурации, при этом цельно-поворотные внешние секции второго крыла, имеющие симметричный их профиль и снабженные возможностью их поворота в вертикальной поперечной плоскости вокруг продольной оси соответствующей поворотной задней части МКГ, и обеспечивающие выполнения после поворота левой и правой его внешних секций соответственно против и по часовой стрелки при виде спереди функции двух дополнительных надкрыльных стреловидных килей к основному килю, имеющему над мотогондолами цельно-поворотную концевую часть, обеспечивая на сверхзвуковых скоростях уменьшение сдвига фокуса крыла назад, улучшение устойчивости по тангажу, рысканию и крену, но и обратно, причем на режимах ВВП и зависания каждый НВ, работающий без взаимного влияния и перекрытия с другим НВ, но и не взаимодействующий с реактивной струей исходящей из сопла соответствующего ТРДД с УВТ, выполнен без управления циклического изменения его шага и с жестким креплением его лопасти и профилированного противовеса.
Кроме того, каждый упомянутый ТРДД смонтирован между кормовых щитков, имеет вдоль продольной его оси заднее круглое реактивное сопло, которое соединено с круглым соплом другого ТРДД поперечным валом с гидроприводом для синхронного их поворота в вертикальной продольной плоскости на угол до 95° вниз и обратно вверх соответственно на режимах ВВП, зависания и горизонтального полета, имеет между компрессорами низкого и высокого давления (КНД и КВД) для отбора мощности средний вывод радиального вала, направленного к оси симметрии и передающего от вала КНД, смонтированного соосно и внутри вала КВД и приводимого турбиной низкого давления, посредством конической зубчатой передачи через муфту сцепления свободную мощность ТРДД на объединительный Т-образный в плане редуктор, имеющий по оси симметрии выходной вал, приводящий Y-образный в плане двухуровневый главный редуктор, имеющий нижние выходные поворотные в горизонтальной плоскости валы со спаренными карданными шарнирами (СКШ), вынесенными снаружи перед центральной осью узлов поворота ППК, проложенными в носке ППК и передающими крутящий момент на угловые редукторы НВ, размещенных на режимах ВВП и зависания спереди по полету от центра масс на расстоянии обратно пропорциональном между приложением подъемной силы и вертикальной реактивной тяги соответственно в системах холодного потока воздуха от двух НВ и горячего выхлопа реактивной струи от двух ТРДД с УВТ, при этом на режимах ВВП и зависания газовые тракты ТРДД, имеющих агрегаты усиления тяги, взаимосвязаны и, как следствие, при отказе одного из ТРДД газы от работающего ТРДД будут подаваться на оба сопла ТРДД с УВТ, исключая дополнительные несбалансированные моменты, причем каждый подкрыльный воздухозаборник снабжен передней кромкой, размещенной при виде сбоку параллельно передней кромке подфюзеляжных килей, имеющих на передних концах их законцовок ИК-излучатели и видеокамеры, смонтированных на концах и снизу по внешним бортам МКГ, отклоненных наружу под углом 15° от плоскости симметрии, при этом внутренние трапециевидные секции крыла ХОС, имеющие как кормовые щитки, образующие заднюю кромку второго крыла ХОС с отрицательным и положительным углами стреловидности, так и внешние секции, которые в стояночной конфигурации выполнены складывающимися с каждой стороны во внутрь, причем в передних и задних частях МКГ смонтированы соответственно авиационные пушки модели 9-А1-4071К и главные стойки убирающегося колесного шасси.
Кроме того, каждый упомянутый однолопастной НВ, выполненный со ступенчатым профилем концевой части на одной третьей радиуса с обратным сужением лопасти, имеющей концевую хорду лопасти в 2,0 раза больше ее корневой хорды и клиновидный профиль с углом α=10° и непрерывной нижней поверхностью, снабжен верхним уступом-вырезом ромбовидной в плане формы, внешние выступающие стороны которой, имея вогнутые во внутрь задние кромки лопасти, создают в точке максимальной ее хорды (bmaxHB), совмещенной в уступе-вырезе с меньшей диагональю ромбовидной в плане формы, образующей как конфигурацию профиля ступеньки по ширине и глубине - это соответственно 1/2 от хорды bmaxHB и 2/3 от толщины сmaxHB, так и заостренную законцовку лопасти, имеющую параболическую переднюю кромку и обратной стреловидности заднюю кромку, при этом на режимах ВВП и зависания каждый ТРДД, выполненный с элементами цифрового программного управления, сочетающего в двухрежимной системе регулирования и управления одновременный режим его работы как при отборе свободной мощности на привод НВ, так и при сбалансированном распределении остаточной реактивной тяги между плоских сопел ТРДД с УВТ, размещенных между кормовых щитков, позволяющих экранировать ТРДД с плоскими соплами, смонтированными сверху над гребенчатой поверхностью с термопоглощающим слоем хвостовой части фюзеляжа, имеющей между концами разнесенных упомянутых МКГ пилообразную в плане заднюю ее кромку, причем каждый упомянутый ТРДД с переходником 29, обеспечивающим как управление площадью критического и выходного многоугольных сечений его сопла в суживающейся или расширяющейся частях, так и плавное удобообтекаемое изменение его сечения с круглого сопла на шестигранное и затем на пятигранное плоское сопло, снабженное и нижней граненной стенкой 30, имеющей при виде сзади V-образную конфигурацию, и верхней створкой 31, состоящей из синхронно отклоняемых между вертикальных боковых стенок 28 вниз двух ее частей прямоугольной 32 и пятиугольной 33 формы в плане соответственно на углы 22,5° и 22,5°, но и вокруг первой 34 и второй 35 поперечных осей так, что в нижнем положении задняя кромка верхней створки 31 соприкасается с нижней граненной стенкой 30, имеющей как угол при ее вершине равновеликий углу V-образной задней кромке верхней створки 31, так и на ее V-образных гранях люк с двумя прямоугольными в плане передними 36 и двумя трапециевидными в плане задними 37 разновеликими по площади створками, имеющими на противоположных сторонах пятиугольного в плане люка узлы поворота, создающие автоматическое синхронное отклонение отвесно вниз с одновременным поворотом вниз верхней створки 31 так, что две передние меньшие 36 из них отклоняются по полету, а две задние большие 37- против полета, образующие с незамкнутыми передней и задней боковыми поверхностями пятиугольный люк-сопло (ПЛС), которое, имея площадь и ширину равновеликие переходнику 29 сопла пятигранной формы, создает соответствующее отклонение вектора реактивной тяги с горизонтального на вертикальное, но и обратно, при этом диагонально расположенная пара передней прямоугольной 36 и трапециевидной в плане 37 створок, размещенных на гранях нижней стенки 30 каждого ТРДД, имеющих на нижних их сторонах треугольные 38 при виде сзади концевые части, выполненные с отгибом, угол которого равновелик углу между граней нижней стенки 30 и создающие при их первоочередном отклонении вниз перед открыванием диагонально размещенных других плоских прямоугольной 36 и трапециевидной в плане 37 створок непрерывные переднюю и заднюю боковые поверхности нижнего ПЛС, причем синхронное отклонение прямоугольной 32+с пятиугольной 33 частей верхней створки 31 вниз на 22,5°+7,5° или 22,5°+22,5° с одновременным открыванием в ПЛС попарно створок, отклоняемых вниз по полету 36 или против 37, образуя их наклон к горизонтали под углом 45°, обеспечивают возможность выполнения короткого взлета или посадки с коротким пробегом соответственно посредством создания наклонно-горизонтальной реактивной тяги или реверса горизонтальной тяги.
Благодаря наличию этих признаков, позволяющих освоить беспилотный малозаметный самолет-вертолет (БМСВ), который снабжен на концах левого и правого поворотных профилированных кронштейнов (ППК), позволяющих после их поворота в горизонтальной плоскости как укладывать соответствующие несущие винты (НВ) в боковые внешние ниши (БВН) с соответствующих бортов межкрыльных гондол (МКГ) для горизонтального полета при зафиксированных и уложенных в них поперечных НВ, так и после выдвижения ППК из МКГ использовать левый и правый НВ, вращающиеся соответственно по часовой и против часовой стрелки, только при выполнении вертикального и короткого взлета/посадки (ВВП и КВП) или на переходных и барражирующих режимах полета, но и оснащен двумя подъемно-маршевыми турбореактивными двухконтурными двигателями (ТРДД) с управляемым вектором тяги (УВТ) и отбором мощности на привод НВ как для создания подъемной силы и управляющих моментов по тангажу, крену и курсу при выполнении ВВП и зависания, так и реактивной тяги при горизонтальном полете в конфигурации транс- или сверхзвукового самолета после остановки однолопастных НВ, втягивания их противовесом и фиксации лопастей вдоль ППК, размещаемых после их поворота назад по полету параллельно оси симметрии внутри МКГ в их БВН, имеющих нижнюю и верхнюю продольные створки, открывающиеся на режимах ВВП и зависания наружу от внешних бортов удобообтекаемых МКГ с обеспечением после выдвижения ППК с НВ из их БВН свободное вращение НВ с их выдвинутыми телескопическими противовесами перед БВН с закрытыми створками и между внешних секций среднерасположенного крыла с Х-образной стреловидностью (ХОС) в плане, корневые части которого с наплывами смонтированы над подкрыльными боковыми воздухозаборниками ТРДД, имеющими конструкцию их каналов с двойной S-образностью при виде и сверху, и с боку, и выполнен с возможностью преобразования полетной его конфигурации после выполнения технологии КВП или ВВП с винтокрыла или вертолета двухвинтовой несущей схемы с УВТ каждого ТРДД в соответствующий высокоскоростной винтокрыл или крылатый автожир при максимальном или нормальном взлетном весе соответственно с НВ, работающими на режимах близких к их авторотации или при авторотирующих НВ, увеличивающих несущую способность крыла ХОС с обеспечением режима барражирующего полета, но и обратно, при этом в передней части каждой надкрыльной части мотогондолы над входным устройством ТРРД имеется продольные автоматически открываемые створки для доступа дополнительного потока воздуха для работы ТРРД на режимах ВВП и зависания, причем скошенные боковые стороны как верхней и нижней частей фюзеляжа с уплощенной носовой его частью, так и подкрыльных и надкрыльных частей воздухозаборников и мотогондол, уменьшая эффективную площадь рассеивания, образуют соответственно шестигранное поперечное сечение и граненные конфигурации при виде спереди с острой линией непрерывно распространяющейся от носа до хвоста, включая верхние поверхности крыла ХОС, имеющего клиновидный профиль, первое и второе крыло соответственно обратной и прямой стреловидности с внешними секциями, смонтированными сверху и от внешних бортов подкрыльных МКГ соответственно с положительным и отрицательным углами их поперечного V, образующими при виде спереди левую и правую V-образные конфигурации, при этом цельно-поворотные внешние секции второго крыла, имеющие симметричный их профиль и снабженные возможностью их поворота в вертикальной поперечной плоскости вокруг продольной оси соответствующей поворотной задней части МКГ, и обеспечивающие выполнения после поворота левой и правой его внешних секций соответственно против и по часовой стрелки при виде спереди функции двух дополнительных надкрыльных стреловидных килей к основному килю, имеющему над мотогондолами цельно-поворотную концевую часть, обеспечивая на сверхзвуковых скоростях уменьшение сдвига фокуса крыла назад, улучшение устойчивости по тангажу, рысканию и крену, но и обратно, причем на режимах ВВП и зависания каждый НВ, работающий без взаимного влияния и перекрытия с другим НВ, но и не взаимодействующий с реактивной струей исходящей из сопла соответствующего ТРДД с УВТ, выполнен без управления циклического изменения его шага и с жестким креплением его лопасти и профилированного противовеса. Все это позволит в БМСВ при переходных маневрах повысить поперечную устойчивость и управляемость по крену, а размещение двух ТРДД с УВТ между кормовых щитков позволит упростить систему трансмиссии и экранировать ТРДД, снабженные плоскими соплами, смонтированными сверху над гребенчатой поверхностью с термопоглощающим слоем хвостовой части фюзеляжа, имеющей пилообразную в плане заднюю ее кромку. Что позволит значительно уменьшить ИК-излучение ТРДД. Развитые наплывы крыла ХОС ограждают от радаров турбины ТРДД наравне с прямым скосом передней кромки их воздухозаборников, но и увеличивает показатели аэродинамических и структурных преимуществ клиновидного крыла ХОС, что позволит достичь улучшенного большого ламинарного течения. Причем воздухозаборники ТРДД, каналы которых выполнены с двойной S-образностью при виде сверху и сбоку, ограждают их турбины от облучения радаром РЛС. Кроме того, это позволит повысить безопасность полетов и использовать ТРДД меньших габаритов в их поперечнике, что уменьшит мидель мотогондол и их аэродинамическое сопротивление. Применение убираемых НВ в БВН двух МКГ позволит достичь более высокую аэродинамическую эффективность. Поэтому основной режим работы НВ - это режимы ВВП и зависания БМСВ. При этом телескопические противовесы однолопастных НВ уменьшают при их втягивании радиус укладываемых НВ в БВН и длину продольных их створок. Это позволит уменьшить вес планера, улучшить весовую отдачу, повысить дальность полета БМСВ, выполненного по малозаметной технологии. Последнее увеличивает вероятность поражения подводной цели и повышает эффективность противолодочной обороны, особенно, при барражирующем продолжительном полете палубного БМСВ со скоростью 220-250 км/ч в полетной конфигурации крылатого автожира.
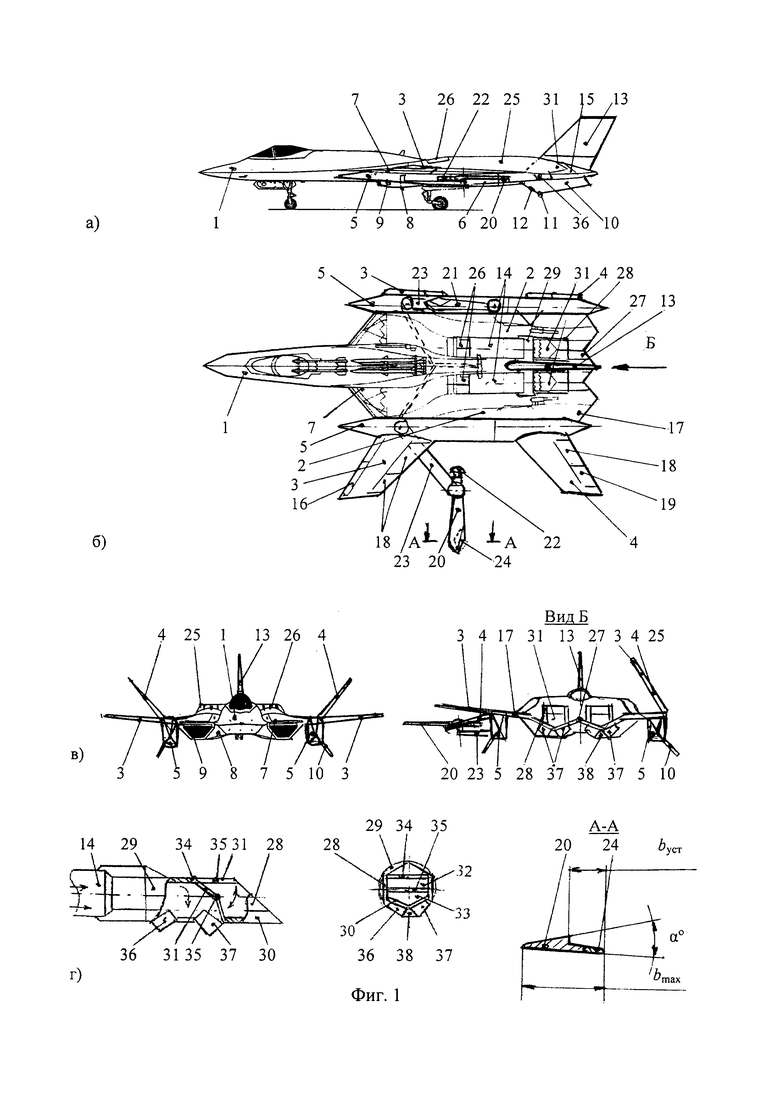
Предлагаемое изобретение предпочтительного исполнения палубного БМСВ с двумя однолопастными НВ и двумя ТРДД с УВТ и плоскими соплами, размещенными сверху хвостовой части фюзеляжа над гребенчатой его поверхностью, иллюстрируется на фиг. 1 и общих видах сбоку, сверху и спереди соответственно а), б) и в) с расположением плоского сопла с поворотной створкой в двух проекциях на виде г):
а) в полетной конфигурации винтокрыла при коротком взлете с отклонением в соплах верхних створок 31 вниз на 30° и передней пары створок 36 вниз на 45° или крылатого автожира с авторотирующими НВ, имеющим телескопические выдвинутые противовесы и их лопастей из БВН, повышающим несущую способность крыла ХОС при вращении НВ от набегающего потока при барражирующем полете;
б) в полетной конфигурации вертолета с крылом ХОС, имеющим условное расположение правых внешних сложенных его секций с правым НВ в стояночной конфигурации, основным стреловидным килем, имеющим цельно-поворотную концевую часть, и реактивными плоскими соплами с УВТ, создающими вертикальную реактивную тягу ТРДД наравне с подъемной силой, создаваемой поперечными НВ, лопасти которых свободно вращаются перед МКГ и между внешними секциями крыла ХОС;
в) в полетной конфигурации сверхзвукового самолета с крылом обратной стреловидности, трехкилевым оперением, имеющим наравне с основным килем и два дополнительных киля, образованных после поворота внешних секций второго крыла ХОС и при втянутых в БВН лопастей левого и правого НВ с втянутыми телескопическими их противовесами и размещенных вдоль ППК внутри МКГ, и реактивной маршевой тягой, обеспечиваемой двумя бесфорсажными ТРДД с УВТ плоских сопел.
Палубный БМСВ, представленный на фиг. 1, выполнен по двухвинтовой несущей схеме, интегральной аэродинамической концепции и планером из композитного углепластика, содержит фюзеляж 1, малого удлинения среднерасположенное крыло ХОС, включающее внутренние трапециевидные секции 2 и первое и второе крыло соответственно с внешним секциями обратной 3 и прямой 4 стреловидности, соединенными удобообтекаемыми МКГ 5 с БВН, имеющими автоматически раскрываемые продольные створки 6. Под наплывами 7 ХОС 3-4 имеются подкрыльные воздухозаборники 8 со скошенной передней его кромкой 9 параллельно размещенной передней кромке подфюзеляжных килей 10, на законцовках которых размещены видеокамеры 11 и ИК-излучатели 12. Развитый основной киль с цельно-поворотной концевой частью 13 смонтирован между мотогондол, в которых установлены ТРДД 14 со скошенными назад плоскими соплами 15 и УВТ (см. фиг. 1г). С клиновидным профилем крыло ХОС 3-4 имеет как предкрылки 16, так и наплывы 7 с переменной стреловидностью, внутреннею трапециевидную секцию 2 с кормовыми щитками 17, но и поворотные вверх внешние секции 3 и 4 крыла ХОС соответственно с закрылками 18 и элевонами 19. Однолопастные левый 20 и правый 21 НВ имеют телескопические противовесы 22 его лопастей (см фиг. 1а), смонтированы на концах соответствующих ППК 23. Однолопастные НВ 20-21, вращаясь в противоположные стороны (см фиг. 1б), гасят реактивный момент и изменяют балансировку по курсу при работе поперечных НВ 20-21, которые выполнены без автомата перекоса и с жестким креплением их лопастей и противовесов 22. Каждая лопасть НВ 20-21, имея клиновидные профили лопастей и непрерывной верхней их поверхностью выполнены с нижним уступом-вырезом ромбовидной в плане формы, внешние выступающие стороны которой образуют равнобедренный треугольник в плане, выполняющий на лопастях НВ 20-21 роль рулевых поверхностей 24 с сервоприводом, изменяющие продольно-поперечную балансировку на режимах ВВП и зависания (см. на фиг. 1 вид А-А).
Комбинированная СУ с ТРДД в надкрыльных мотогондолах 25, имеющих над входным устройством ТРРД створки 26, установлены между кормовыми щитками 17 (см. фиг. 1б), выполнены с отбором мощности и возможностью ее перераспределения от ТРДД на угловые редукторы НВ 20-21, которое создается объединительным Т-образным в плане и главным Y-образным в плане редукторами (на фиг. 1 не показаны) и плоскими соплами 15 ТРДД 14 соответственно 60% и 40% от мощности СУ на режимах ВВП, зависания БМСВ и сверхзвукового горизонтального его полета. Оба ТРДД 14 с муфтами сцепления образуют с объединительным редуктором синхронизирующую систему (на фиг. 1 не показаны), снабжены для режима ВВП и зависания системой УВТ с плоскими соплами 15, установленными сверху хвостовой части фюзеляжа 1 над гребенчатой поверхностью 27 с термопоглощающим слоем, имеющими две неподвижные вертикальные боковые стенки 28 сопла 15. Каждое плоское сопло 15 бесфорсажного ТРДД 14 имеет переходник 29, обеспечивающий как управление площадью критического и выходного многоугольных сечений его сопла в суживающейся или расширяющейся частях, так и плавное удобообтекаемое изменение его сечения с круглого сопла на шестигранное и затем на пятигранное плоское сопло, снабженное и нижней граненной стенкой 30, имеющей при виде сзади V-образную конфигурацию, и верхней створкой 31, состоящей из синхронно отклоняемых между вертикальных боковых стенок 28 вниз двух ее частей прямоугольной 32 и пятиугольной 33 формы в плане соответственно на углы 22,5° и 22,5°, но и вокруг первой 34 и второй 35 поперечных осей так, что в нижнем положении задняя кромка верхней створки 31 соприкасается с нижней граненной стенкой 30, имеющей как угол при ее вершине равновеликий углу V-образной задней кромке верхней створки 31, так и на ее V-образных гранях люк с двумя прямоугольными в плане передними 36 и двумя трапециевидными в плане задними 37 разновеликими по площади створками, имеющими на противоположных сторонах пятиугольного в плане люка узлы поворота, создающие автоматическое синхронное отклонение отвесно вниз с одновременным поворотом вниз верхней створки 31 так, что две передние меньшие 36 из них отклоняются по полету, а две задние большие 37 - против полета, образующие с незамкнутыми передней и задней боковыми поверхностями пятиугольный люк-сопло (ПЛС), которое, имея площадь и ширину равновеликие переходнику 29 сопла пятигранной формы, создает соответствующее отклонение вектора реактивной тяги. Диагонально расположенная пара передней прямоугольной 36 и трапециевидной в плане 37 створок, размещенных на гранях нижней стенки 30 каждого ТРДД, имеющих на нижних их сторонах треугольные 38 при виде сзади концевые части, выполненные с отгибом, угол которого равновелик углу между граней нижней стенки 30 и создающие при их первоочередном отклонении вниз непрерывные переднюю и заднюю боковые поверхности нижнего ПЛС. На режимах ВВП и в случае отказа двух ТРДД во время аварийной посадки БМСВ его поперечные НВ 20-21 работает на режиме авторотации и разгружает крыло ХОС 3-4. При этом закрылки 18 крыла ХОС 3-4 автоматически отклоняются на угол 47°, а при выполнении КВП в винтокрылой конфигурации - на угол 30°.
Управление палубным БМСВ обеспечивается изменением общего шага поперечных НВ 20-21 и отклонением рулевых поверхностей: элевонов 20, рулей высоты 20 и направления 13. При крейсерском полете подъемная сила создается ХОС 3-4 с наплывами 7, а маршевая реактивная тяга -каждым ТРДД 14 через сопло 15 при открытой верхней створке 31 и закрытых нижних двух передних 36 и двух задних 37 створок, на режиме висения - НВ 20-21 и каждым ТРДД 14 через сопло 15 при закрытой створке 31 и открытых двух передних 36 и двух задних 37 створок, на режиме перехода - ХОС 3-4 с НВ 20-21 и двумя ТРДД 14 с УВТ. При переходе к режиму ВВП и зависания предкрылки 16 с закрылками 18 (см. фиг. 1б) крыла ХОС 3-4 синхронно отклоняются на максимальные их углы. После создания подъемной тяги НВ 20-21 и ТРДД 14 с УВТ обеспечиваются вертолетные режимы (см. фиг. 1в). Рулевые поверхности 25 НВ 20-21 (см. фиг. 1б) снабжены сервоприводом и возможностью на режимах зависания их синхронного дифференциального отклонения в вертикальной плоскости так, что при их отклонении вниз/вверх и прохождении при этом лопастей НВ 20-21 с передней/задней или левой/правой частей фюзеляжа 1, изменяет балансировку соответственно по тангажу или крену. Управление по курсу на режимах ВВП и зависания обеспечивается двумя НВ 20-21, смонтированными на концах ППК 23.
После вертикального взлета и набора высоты, убирается механизация крыла ХОС 3-4 и НВ 20-21, выполненные с возможностью на переходных к самолетным режимам горизонтального полета БМСВ фиксированной их остановки их лопастей вдоль ППК 23 и последующего как синхронного втягивания противовесов 22 НВ 20-21, так и их совместного поворота с ППК 23 в направлении назад по полету и их укладывания в БВН МКГ 5 (см. фиг. 1в). Затем создается совместная реактивная тяга от двух ТРДД 14 и производится транс- или сверхзвуковой крейсерский полет, при котором путевое управление обеспечивается рулями направления 13. Продольное и поперечное управление в самолетной конфигурации осуществляется синфазным и дифференциальным соответственно отклонением рулей высоты 19 и элевонов 19.
Таким образом, БМСВ с двумя ТРДД, приводимыми НВ в двухвинтовой несущей схеме, крутящий момент в которой гасится противоположным направления вращения поперечных НВ, но и позволяет изменять балансировку по курсу и крену, представляет собой СВВП, который изменяет свою полетную конфигурацию только благодаря укладки лопастей НВ во внутрь БВН и вдоль продольной оси МКГ и выполнен по интегральной аэродинамической схеме с крылом ХОС и вертикальным килем. Плоские сопла двух ТРДД, имеющих переходники, обеспечивающие плавное изменение их сечения с круглого сопла на шестигранное и затем на пятигранное, выполненное с УВТ. Несмотря на незначительные потери (до 3%) тяги от неоптимальной формы сопел, такая последовательно преобразуемая форма сопла весьма снижает ИК-заметность БМСВ. Кроме того, это также приводит к улучшению сверхзвуковых характеристик и уменьшению радиолокационной, инфракрасной и визуальной заметности. Развитые наплывы крыла ХОС, предназначенные для генерирования вихрей при маневрировании на больших углах атаки, создают за счет их совместного участия в реализации подъемной силы возможность наравне выполнения технологии ВВП и КВП при взлетно-посадочных режимах полета палубных БМСВ и достижения высокой тяговооруженности комбинированной СУ, которая обладает наименьшей удельной нагрузкой на мощность, особенно, с механическим приводом НВ от ТРДД.
Поэтому у БМСВ-1,7 с взлетным весом 15,55 т коэффициент удельной нагрузки на мощность с применением двухлопастного НВ, приводимого двумя ТРДД с тягой по 6800 кгс каждый, имеющих отбор 60% мощности СУ на НВ и 40% ТРДД, составит 0,874 кгс/т, что в 1,41 меньше, чем у сопоставимого СВВП Як-141 с энергозатратной СУ, который при взлетном весе 15,8 т использует подъемно-маршевый ТРДД модели Р179 В-300 тягой 10977 кгс и два подъемных ТРД с тягой по 4260 кгс каждый.
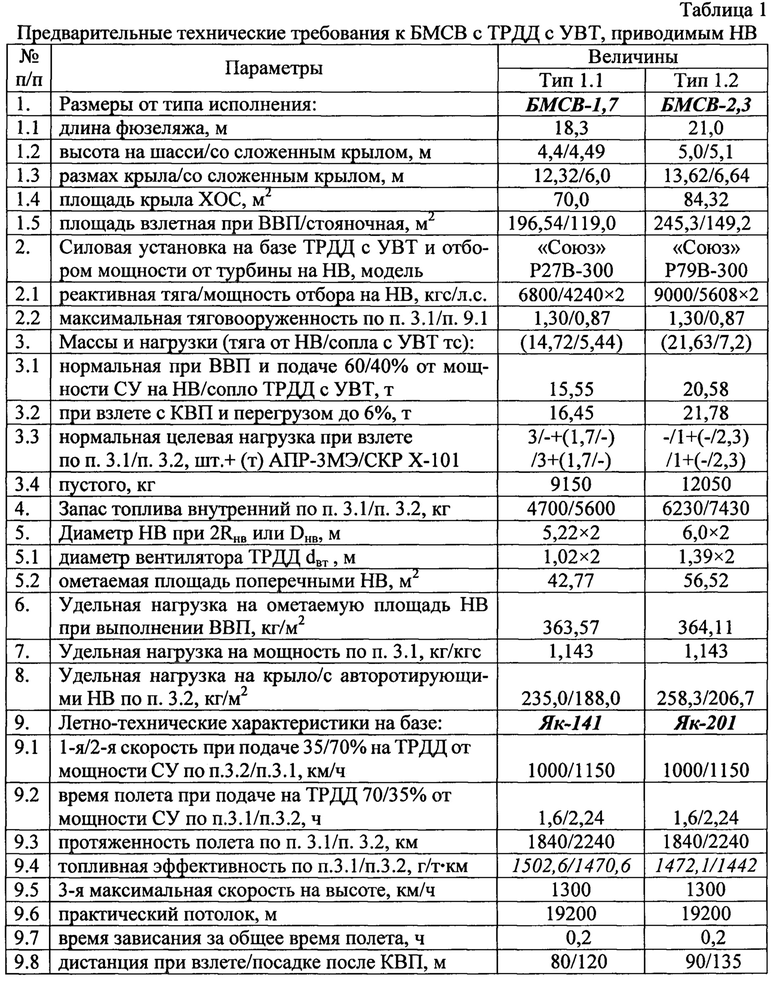
Несомненно, с течением времени широкое использование в СУ ТРДД, особенно, с плоскими реактивными соплами и УВТ позволит добиться уменьшения инфракрасной и визуальной заметности в сравнении с СВВП модели F-35V (США), что немаловажно для палубных противолодочных СВВП типа БМСВ-1,7, БМСВ-2,3 (см. табл. 1).
Изобретение относится к области авиационной техники и может быть использовано в конструкции беспилотных самолетов-вертолетов. Беспилотный малозаметный самолет-вертолет (БМСВ) снабжен на концах левого и правого поворотных профилированных кронштейнов (ППК) однолопастными несущими винтами (НВ), используемыми при выполнении вертикального и короткого взлета/посадки или на переходных и барражирующих режимах полета. ППК позволяют после их поворота в горизонтальной плоскости укладывать соответствующие НВ в боковые внешние ниши с соответствующих бортов межкрыльных гондол. БМСВ оснащен двумя подъемно-маршевыми турбореактивными двухконтурными двигателями (ТРДД) с управляемым вектором тяги (УВТ) и отбором мощности на привод НВ для создания подъемной силы и управляющих моментов при выполнении ВВП и зависания, и реактивной тяги при горизонтальном полете. БМСВ имеет среднерасположенное крыло с Х-образной стреловидностью в плане, корневые части которого с наплывами смонтированы над подкрыльными боковыми воздухозаборниками ТРДД, имеющими конструкцию из каналов с двойной S-образностью при виде и сверху, и сбоку. Обеспечивается уменьшение инфракрасной и визуальной заметности, увеличение скорости и дальности полета. 2 з.п. ф-лы, 1 табл., 4 ил.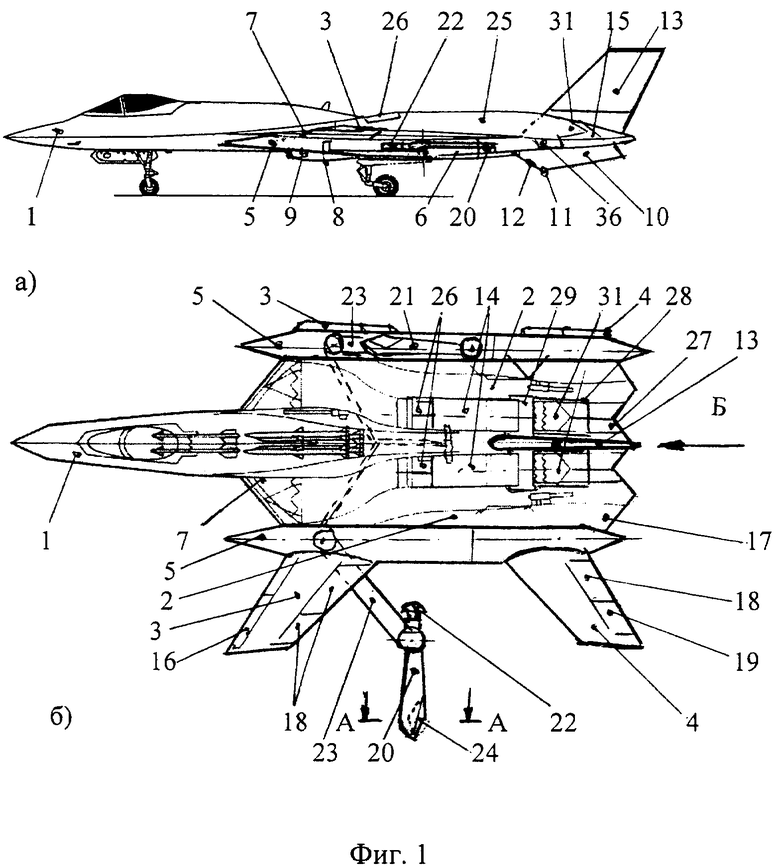
1. Беспилотный малозаметный самолет-вертолет, содержащий стреловидное крыло, реактивные двигатели, хвостовое оперение и трехопорное убирающееся колесное шасси, отличающийся тем, что он снабжен на концах левого и правого поворотных профилированных кронштейнов (ППК), позволяющих после их поворота в горизонтальной плоскости как укладывать соответствующие несущие винты (НВ) в боковые внешние ниши (БВН) с соответствующих бортов межкрыльных гондол (МКГ) для горизонтального полета при зафиксированных и уложенных в них поперечных НВ, так и после выдвижения ППК из МКГ использовать левый и правый НВ, вращающиеся соответственно по часовой и против часовой стрелки, только при выполнении вертикального и короткого взлета/посадки (ВВП и КВП) или на переходных и барражирующих режимах полета, но и оснащен двумя подъемно-маршевыми турбореактивными двухконтурными двигателями (ТРДД) с управляемым вектором тяги (УВТ) и отбором мощности на привод НВ как для создания подъемной силы и управляющих моментов по тангажу, крену и курсу при выполнении ВВП и зависания, так и реактивной тяги при горизонтальном полете в конфигурации транс- или сверхзвукового самолета после остановки однолопастных НВ, втягивания их противовесом и фиксации лопастей вдоль ППК, размещаемых после их поворота назад по полету параллельно оси симметрии внутри МКГ в их БВН, имеющих нижнюю и верхнюю продольные створки, открывающиеся на режимах ВВП и зависания наружу от внешних бортов удобообтекаемых МКГ с обеспечением после выдвижения ППК с НВ из их БВН свободного вращения НВ с их выдвинутыми телескопическими противовесами перед БВН с закрытыми створками и между внешних секций среднерасположенного крыла с Х-образной стреловидностью (ХОС) в плане, корневые части которого с наплывами смонтированы над подкрыльными боковыми воздухозаборниками ТРДД, имеющими конструкцию их каналов с двойной S-образностью при виде и сверху, и с боку, и выполнен с возможностью преобразования полетной его конфигурации после выполнения технологии КВП или ВВП с винтокрыла или вертолета двухвинтовой несущей схемы с УВТ каждого ТРДД в соответствующий высокоскоростной винтокрыл или крылатый автожир при максимальном или нормальном взлетном весе соответственно с НВ, работающими на режимах, близких к их авторотации или при авторотирующих НВ, увеличивающих несущую способность крыла ХОС с обеспечением режима барражирующего полета, но и обратно, при этом в передней части каждой надкрыльной части мотогондолы над входным устройством ТРРД имеются продольные автоматически открываемые створки для доступа дополнительного потока воздуха для работы ТРРД на режимах ВВП и зависания, причем скошенные боковые стороны как верхней и нижней частей фюзеляжа с уплощенной носовой его частью, так и подкрыльных и надкрыльных частей воздухозаборников и мотогондол, уменьшая эффективную площадь рассеивания, образуют соответственно шестигранное поперечное сечение и граненные конфигурации при виде спереди с острой линией, непрерывно распространяющейся от носа до хвоста, включая верхние поверхности крыла ХОС, имеющего клиновидный профиль, первое и второе крыло соответственно обратной и прямой стреловидности с внешними секциями, смонтированными сверху и от внешних бортов подкрыльных МКГ соответственно с положительным и отрицательным углами их поперечного V, образующими при виде спереди левую и правую V-образные конфигурации, при этом цельно-поворотные внешние секции второго крыла, имеющие симметричный их профиль и снабженные возможностью их поворота в вертикальной поперечной плоскости вокруг продольной оси соответствующей поворотной задней части МКГ, и обеспечивающие выполнения после поворота левой и правой его внешних секций соответственно против и по часовой стрелке при виде спереди функции двух дополнительных надкрыльных стреловидных килей к основному килю, имеющему над мотогондолами цельно-поворотную концевую часть, обеспечивая на сверхзвуковых скоростях уменьшение сдвига фокуса крыла назад, улучшение устойчивости по тангажу, рысканию и крену, но и обратно, причем на режимах ВВП и зависания каждый НВ, работающий без взаимного влияния и перекрытия с другим НВ, но и не взаимодействующий с реактивной струей, исходящей из сопла соответствующего ТРДД с УВТ, выполнен без управления циклического изменения его шага и с жестким креплением его лопасти и профилированного противовеса.
2. Беспилотный малозаметный самолет-вертолет по п. 1, отличающийся тем, что каждый упомянутый ТРДД смонтирован между кормовых щитков, имеет вдоль продольной его оси заднее круглое реактивное сопло, которое соединено с круглым соплом другого ТРДД поперечным валом с гидроприводом для синхронного их поворота в вертикальной продольной плоскости на угол до 95° вниз и обратно вверх соответственно на режимах ВВП, зависания и горизонтального полета, имеет между компрессорами низкого и высокого давления (КНД и КВД) для отбора мощности средний вывод радиального вала, направленного к оси симметрии и передающего от вала КНД, смонтированного соосно и внутри вала КВД и приводимого турбиной низкого давления, посредством конической зубчатой передачи через муфту сцепления свободную мощность ТРДД на объединительный Т-образный в плане редуктор, имеющий по оси симметрии выходной вал, приводящий Y-образный в плане двухуровневый главный редуктор, имеющий нижние выходные поворотные в горизонтальной плоскости валы со спаренными карданными шарнирами (СКШ), вынесенными снаружи перед центральной осью узлов поворота ППК, проложенными в носке ППК и передающими крутящий момент на угловые редукторы НВ, размещенных на режимах ВВП и зависания спереди по полету от центра масс на расстоянии, обратно пропорциональном между приложением подъемной силы и вертикальной реактивной тяги соответственно в системах холодного потока воздуха от двух НВ и горячего выхлопа реактивной струи от двух ТРДД с УВТ, при этом на режимах ВВП и зависания газовые тракты ТРДД, имеющих агрегаты усиления тяги, взаимосвязаны и, как следствие, при отказе одного из ТРДД газы от работающего ТРДД будут подаваться на оба сопла ТРДД с УВТ, исключая дополнительные несбалансированные моменты, причем каждый подкрыльный воздухозаборник снабжен передней кромкой, размещенной при виде сбоку параллельно передней кромке подфюзеляжных килей, имеющих на передних концах их законцовок ИК-излучатели и видеокамеры, смонтированных на концах и снизу по внешним бортам МКГ, отклоненных наружу под углом 15° от плоскости симметрии, при этом внутренние трапециевидные секции крыла ХОС, имеющие как кормовые щитки, образующие заднюю кромку второго крыла ХОС с отрицательным и положительным углами стреловидности, так и внешние секции, которые в стояночной конфигурации выполнены складывающимися с каждой стороны вовнутрь, причем в передних и задних частях МКГ смонтированы соответственно авиационные пушки модели 9-А1-4071К и главные стойки убирающегося колесного шасси.
3. Беспилотный малозаметный самолет-вертолет по п. 1, отличающийся тем, что каждый упомянутый однолопастной НВ, выполненный со ступенчатым профилем концевой части на одной третьей радиуса с обратным сужением лопасти, имеющей концевую хорду лопасти в 2,0 раза больше ее корневой хорды и клиновидный профиль с углом α=10° и непрерывной нижней поверхностью, снабжен верхним уступом-вырезом ромбовидной в плане формы, внешние выступающие стороны которой, имея вогнутые вовнутрь задние кромки лопасти, создают в точке максимальной ее хорды bmaxHB, совмещенной в уступе-вырезе с меньшей диагональю ромбовидной в плане формы, образующей как конфигурацию профиля ступеньки по ширине и глубине, - это соответственно 1/2 от хорды bmaxHB и 2/3 от толщины cmaxHB, так и заостренную законцовку лопасти, имеющую параболическую переднюю кромку, и обратной стреловидности заднюю кромку, при этом на режимах ВВП и зависания каждый ТРДД, выполненный с элементами цифрового программного управления, сочетающего в двухрежимной системе регулирования и управления одновременный режим его работы как при отборе свободной мощности на привод НВ, так и при сбалансированном распределении остаточной реактивной тяги между плоских сопел ТРДД с УВТ, размещенных между кормовых щитков, позволяющих экранировать ТРДД с плоскими соплами, смонтированными сверху над гребенчатой поверхностью с термопоглощающим слоем хвостовой части фюзеляжа, имеющей между концами разнесенных упомянутых МКГ пилообразную в плане заднюю ее кромку, причем каждый упомянутый ТРДД с переходником (29), обеспечивающим как управление площадью критического и выходного многоугольных сечений его сопла в суживающейся или расширяющейся частях, так и плавное удобообтекаемое изменение его сечения с круглого сопла на шестигранное и затем на пятигранное плоское сопло, снабженное и нижней граненной стенкой (30), имеющей при виде сзади V-образную конфигурацию, и верхней створкой (31), состоящей из синхронно отклоняемых между вертикальных боковых стенок (28) вниз двух ее частей прямоугольной (32) и пятиугольной (33) формы в плане соответственно на углы 22,5° и 22,5°, но и вокруг первой (34) и второй (35) поперечных осей так, что в нижнем положении задняя кромка верхней створки (31) соприкасается с нижней граненной стенкой (30), имеющей как угол при ее вершине, равновеликий углу V-образной задней кромки верхней створки (31), так и на ее V-образных гранях люк с двумя прямоугольными в плане передними (36) и двумя трапециевидными в плане задними (37) разновеликими по площади створками, имеющими на противоположных сторонах пятиугольного в плане люка узлы поворота, создающие автоматическое синхронное отклонение отвесно вниз с одновременным поворотом вниз верхней створки (31) так, что две передние меньшие (36) из них отклоняются по полету, а две задние большие (37) - против полета, образующие с незамкнутыми передней и задней боковыми поверхностями пятиугольный люк-сопло (ПЛС), которое, имея площадь и ширину, равновеликие переходнику (29) сопла пятигранной формы, создает соответствующее отклонение вектора реактивной тяги с горизонтального на вертикальное, но и обратно, при этом диагонально расположенная пара передней прямоугольной 36 и трапециевидной в плане (37) створок, размещенных на гранях нижней стенки (30) каждого ТРДД, имеющих на нижних их сторонах треугольные (38) при виде сзади концевые части, выполненные с отгибом, угол которого равновелик углу между граней нижней стенки (30), и создающие при их первоочередном отклонении вниз перед открыванием диагонально размещенных других плоских прямоугольной (36) и трапециевидной в плане (37) створок непрерывные переднюю и заднюю боковые поверхности нижнего ПЛС, причем синхронное отклонение прямоугольной (32) с пятиугольной (33) частей верхней створки (31) вниз на 22,5°+ 7,5° или 22,5°+ 22,5° с одновременным открыванием в ПЛС попарно створок, отклоняемых вниз по полету (36) или против (37), образуя их наклон к горизонтали под углом 45°, обеспечивают возможность выполнения короткого взлета или посадки с коротким пробегом соответственно посредством создания наклонно-горизонтальной реактивной тяги или реверса горизонтальной тяги.
| САМОЛЕТ ПОНИЖЕННОЙ РАДИОЛОКАЦИОННОЙ ЗАМЕТНОСТИ ПАЛУБНОГО И НАЗЕМНОГО БАЗИРОВАНИЯ С СИСТЕМОЙ АНТЕНН КРУГОВОГО ОБЗОРА | 2014 |
|
RU2572366C2 |
| САМОЛЕТ С УЛУЧШЕННЫМИ АЭРОДИНАМИЧЕСКИМИ ХАРАКТЕРИСТИКАМИ | 2011 |
|
RU2575738C2 |
| US 4587806 A1, 13.05.1986 | |||
| US 20070018034 A1, 25.01.2007 | |||
| US 8690096 B2, 08.04.2014. | |||

