Изобретение относится к области авиации, в частности к аппаратам, сочетающим возможность вертикального взлета и посадки с высокой скоростью крейсерского полета. Скорость полета современных вертолетов ограничена возможностями несущего винта и не превышает, как правило, 300…350 км/час. Вместе с тем, скорость полета непосредственно влияет на эффективность летательного аппарата как транспортного средства. По этой причине задача ее повышения традиционно актуальна для разработчиков винтокрылых летательных аппаратов.
Одним из путей радикального увеличения скорости полета является применение преобразуемых летательных аппаратов. Такие аппараты осуществляют вертикальный взлет в вертолетной конфигурации, затем тем или иным способом переводятся в самолетную конфигурацию и продолжают полет с большой скоростью. Перед посадкой преобразование конфигураций осуществляется в обратном порядке.
Аппараты на подобных принципах предлагались на самых ранних этапах развития авиации. Так, например, в патенте СССР №1593 от 31.01.1925 года Ф.В. Дробышевым предлагался аэроплан-геликоптер, у которого «… мотор смонтирован с крылом так, что крыло вместе с винтомоторной группой может быть поворачиваемо в пределах от 0 до 90°, чем достигается изменение угла атаки крыла и изменение направления силы тяги винтов». Очевидно, что на том этапе развития техники эта задача не могла быть решена.
В патенте СССР №2955 от 20.05.1924 года Г.Г. Карандиным предлагалась еще более экзотическая схема аппарата, сочетающего «… в одном приборе аэропланный, геликоптерный и орнитоптерный принципы поддержания в воздухе летательных аппаратов». Ввиду чрезвычайной сложности конструкции это решение также не могло быть реализовано.
Известен (патент РФ №2012512, 1993 г., МПК В64С 27/22) комбинированный летательный аппарат, содержащий корпус в виде центрального толстого крыла с вертикальным открытым тоннелем, в котором установлен подъемный винт. Аппарат имеет также боковые крылья, хвостовое оперение и маршевые винты и оснащен посадочным устройством на воздушной подушке, охватывающим выход из тоннеля. Особенностью изобретения является согласование размеров подъемного винта и посадочного устройства на воздушной подушке. Основным недостатком этого решения является повышенная потребная мощность силовой установки на режиме висения, обусловленная большой нагрузкой на сметаемую несущим винтом поверхность.
Таким же недостатком обладает и самолет вертикального взлета и посадки (патент РФ №2028964, 1992 г., МПК В64С 27/22), содержащий два фюзеляжа, три тандемно расположенные несущие поверхности, два киля. На средней несущей поверхности закреплена подъемно-маршевая силовая установка, вектор тяги которой лежит в плоскости симметрии самолета. На режиме взлета и посадки силовая установка, включающая два тандемно расположенных винта противоположного вращения, поворачивается в вертикальное положение.
Известен (патент РФ №2081032, 1993 г., МПК В64С 27/22) способ Данилина преобразования вертолета в самолет и вертолет «ВеДан», при котором для вертолета с двумя несущими соосными винтами производят последовательную остановку винтов, при этом обеспечивают симметричное расположение их лопастей относительно набегающего потока автоматическим воздействием набегающего потока на каждую лопасть в режиме ее флюгирования с одновременным поворотом лопасти вокруг своей центральной оси в горизонтальной плоскости. Вертолет по данному способу содержит два несущих винта, установленные соосно, лопасти выполнены в виде стреловидного крыла, а устройство преобразования несущего винта в неподвижное крыло включает радиальные вилки, закрепленные на втулках несущего винта с возможностью свободного поворота вилки вокруг своей продольной оси и кинематически связанные с системой управления шагом винта, при этом лопасти установлены на концах вилок на вертикальных осях вращения, пропущенных через центральную часть лопасти. Недостатками данного решения являются повышенная сложность конструкции несущих винтов и системы управления, а также трудность обеспечения необходимых характеристик прочности несущей системы.
Известен (патент РФ №2099246, 1996 г., МПК В64С 27/22) конвертоплан и его устройство для автоматического развертывания и складывания лопастей подъемного винта. Конвертоплан содержит два параллельно расположенных фюзеляжа с общим крылом, имеющим консоли и центральную балку, а также два двигателя, кинематически связанные с двумя воздушными винтами. Центральная балка размещена неподвижно, в средней ее части выполнен пилон, в котором установлен с возможностью осевого перемещения дополнительный вертикальный вал подъемного винта, кинематически связанный с выходными валами двигателей. Аппарат снабжен устройством для автоматического складывания и развертывания лопастей подъемного винта. Вертикальный взлет осуществляется с помощью несущего винта. Достигнув необходимой высоты, конвертоплан переходит в горизонтальный полет. После того как конвертоплан в горизонтальном полете достигнет скорости, превышающей критическую, т.е. подъемная сила крыла превысит вес конвертоплана, производится остановка подъемного винта. При этом лопасти испытывают воздействие набегающего скоростного напора воздуха, обеспечивающее их автоматическое складывание, после чего вертикальный вал опускается вниз до упора, вследствие чего лопасти фиксируются в ложементе. Конвертоплан продолжает горизонтальный полет на заданной высоте с крейсерской скоростью. Недостатками такого решения являются сложность конструкции и трудность обеспечения необходимого уровня устойчивости и управляемости аппарата в процессе остановки/раскрутки несущего винта. Кроме того, к недостаткам следует отнести тот факт, что на вертолетных режимах крыло, а на самолетных - несущий винт с системой его уборки являются бесполезным (а в значительной степени и вредным) грузом, существенно снижающим весовую отдачу и аэродинамические характеристики аппарата.
Известны преобразуемые летательные аппараты с расположенными на крыле поворотными несуще-тянущими винтами (в частности, самолет Osprey V-22, см., например, информацию официального сайта фирмы Боинг, http://www.boeing.com). При вертикальном положении двигателей (или осей винтов) они осуществляют вертикальный взлет. Затем в процессе разгона оси винтов поворачиваются в горизонтальное положение и дальнейший полет происходит в самолетном режиме со скоростью 500…550 км/час. Однако такие аппараты обладают рядом существенных недостатков. В частности, для обеспечения удовлетворительных характеристик как на висении, так и в крейсерском полете, несуще-тянущие винты должны иметь компромиссную аэродинамическую компоновку. При этом на обоих основных режимах характеристики винтов далеки от оптимальных. Кроме того, большая нагрузка на сметаемую винтами поверхность приводит к большим затратам мощности на режиме висения и соответствующему снижению статического потолка аппарата. Важным недостатком также является невозможность режима авторотации такого аппарата в аварийной ситуации.
Известен (патент РФ №2370414, 20.10.2009, МПК В64С 27/22) многоцелевой дистанционно пилотируемый вертолет-самолет, с двумя воздушными винтами, размещенными в носовой и хвостовой частях фюзеляжа. Винты выполнены поворотными, что обеспечивает возможность преобразования полетной конфигурации аппарата из вертолета двухвинтовой продольной схемы в самолет с расположенными тандемом носовым и хвостовым, соответственно тянущим и толкающим винтами и обратно. Недостатки такого решения те же, что и для предыдущего решения.
Известен (например, П. Бауэртс. Летательные аппараты нетрадиционных схем. М., Мир, 1991, стр.141) преобразуемый аппарат S-72, разработанный фирмой Sikorsky по концепции X-wing в рамках программы RSRA (Rotor Systems Research Aircraft) в 1979 г. На этом аппарате несущий винт выполнен с лопастями, оборудованными системой управления циркуляцией. Это позволяет после вертикального взлета и набора некоторой скорости останавливать несущий винт в полете и использовать его как крыло на самолетных режимах полета. Фирмой были построены 2 экспериментальных вертолета, однако, по причине чрезвычайной сложности конструкции несущего винта и его недостаточной эффективности дальнейшие работы были прекращены.
Известен экспериментальный винтокрылый беспилотный летательный аппарат (БЛА) "Дрэгонфлай", разработанный в отделении "Фантом Уоркс" фирмы Боинг. Его основная идея - применение останавливаемого несущего винта, превращаемого в крыло. БЛА выполнен по схеме "утка" с останавливаемым двухлопастным несущим винтом с реактивным приводом. Для привода несущего винта используется реактивный компрессорный привод с подачей горячих газов от компрессора малогабаритного маршевого ТРД в каналы, расположенные внутри лопастей, с истечением их из сопел на концах лопастей. В ходе летных испытаний были потеряны два аппарата, после чего программа была закрыта. К недостаткам данного решения можно отнести сложность и низкую эффективность реактивного привода несущего винта, а также трудность обеспечения переходных режимов полета.
Известен преобразуемый аппарат, названный «Крыло самолета Павловых» (патент РФ №2101215, 10.01.1998, МПК В64С 27/18, В64С 27/22). Крыло этого аппарата выполнено в виде тонкостенного диска, полость которого разделена перегородкой на две части. Одна из них использована для размещения выдвижных лопастей, а другая - для содержания сжатого воздуха, истекающего из сопел, установленных на периферии диска и создающих крутящий момент. При выдвинутых лопастях крыло представляет собой несущий винт, используемый для вертикального взлета и посадки. Затем в полете лопасти с помощью тросовой системы убираются внутрь диска и полет продолжается на дискообразном крыле в самолетном режиме. К недостаткам этого решения следует отнести сложность конструкции выпуска/уборки лопастей, низкую энергетическую эффективность компрессорного привода несущего винта-крыла, а также малое аэродинамическое качество круглого крыла на крейсерском режиме полета.
Наиболее близким к предлагаемому решению является проект фирмы «Хьюз» пассажирского самолета-вертолета с системой «винт - крыло» (Масленников М.М. и др. Газотурбинные двигатели для вертолетов. М., Машиностроение, 1969, стр.374). Аппарат содержит фюзеляж, хвостовое оперение, силовую установку, трехлопастный несущий винт с реактивным приводом и развитую втулку обтекаемой формы. На концах лопастей размещены сопла, через которые на вертолетном режиме выдувается воздух, отбираемый от ГТД, установленных в хвостовой части фюзеляжа, чем и обеспечивается привод несущего винта. После взлета на вертолетном режиме и набора необходимой скорости несущий винт останавливается таким образом, что одна из лопастей (передняя на самолетном режиме) устанавливается вдоль фюзеляжа, а остальные вместе с втулкой образуют стреловидное крыло самолетного типа. Далее полет продолжается в самолетном режиме, где двигатели аппарата работают в режиме ТРД. К недостаткам данного решения можно отнести следующие:
- реактивный привод несущего винта имеет весьма низкую энергетическую эффективность вследствие больших потерь в газовоздушном тракте и большой скорости истечения из сопел;
- протяженная и сложная трасса для подвода к соплам горячей газовоздушной смеси имеет большую массу и характеризуется большими потерями давления;
- форма втулки, оптимизированная для самолетного режима, приводит к ухудшению характеристик на режиме висения и на переходных режимах;
- при малом расстоянии от фюзеляжа до плоскости вращения винта размещение передней лопасти вдоль фюзеляжа приводит к существенному ухудшению характеристик на висении;
- на режиме висения и при малых скоростях полета необходимы дополнительные средства для управления аппаратом по курсу.
Задачей данного изобретения является создание такой несущей системы (несущего винта-крыла), которая позволит при существенном упрощении конструкции реализовать улучшенные аэродинамические характеристики как на вертолетном, так и на самолетном режимах, а также повысить уровень безопасности полета.
Технический результат заключается в упрощении конструкции аппарата, в увеличении коэффициента полезного действия несущей системы на режиме висения, в упрощении пилотирования и повышении безопасности полета при переходе от вертолетного режима полета к самолетному и обратно. Технический результат заключается также в повышении аэродинамического качества несущей системы на самолетных режимах полета по сравнению с прототипом.
Технический результат достигается тем, что преобразуемый летательный аппарат вертикального взлета и посадки содержит останавливаемый в полете несущий винт-крыло с обтекателем втулки и лопастями, фюзеляж, хвостовое оперение, силовую установку и систему управления, а обтекатель втулки несущего винта выполнен в виде крыла малого удлинения с профилем, часть контура верхней поверхности которого близка к дуге окружности и содержит неподвижную и вращающуюся части, причем вращающаяся часть с закрепленными на ней лопастями выполнена в виде сегмента сферы, образованной вращением указанной дуги окружности.
Технический результат достигается также тем, что вращающаяся часть обтекателя втулки имеет радиус 0,25÷0,5 радиуса несущего винта-крыла.
Технический результат достигается также тем, что неподвижная часть обтекателя втулки снабжена средствами повышения подъемной силы.
Технический результат достигается также тем, что средства повышения подъемной силы выполнены в виде механических закрылков.
Технический результат достигается также тем, что средства повышения подъемной силы выполнены в виде струйных закрылков.
Технический результат достигается также тем, что лопасти несущего винта имеют профиль с относительной толщиной 5…20% хорды с координатами:
Технический результат достигается также тем, что обтекатель втулки выполнен в виде тела вращения, образованного поворотом вышеописанного профиля относительно оси его симметрии.
Технический результат достигается также тем, что лопасти несущего винта установлены с отрицательным углом конусности от 0 до -5°.
Технический результат достигается также тем, что преобразуемый летательный аппарат вертикального взлета и посадки содержит останавливаемый в полете несущий винт-крыло с обтекателем втулки, хвостовое оперение, силовую установку, систему управления, в котором обтекатель втулки несущего винта выполнен в виде несущего корпуса летательного аппарата с профилем, причем часть контура его верхней поверхности близка к дуге окружности и содержит неподвижную и вращающуюся части с закрепленными на ней лопастями, кроме того, вращающаяся часть выполнена в виде сегмента сферы, образованной вращением указанной дуги окружности.
Технический результат достигается также тем, что вращающаяся часть обтекателя втулки имеет радиус 0,25-0,5 радиуса несущего винта-крыла.
Технический результат достигается также тем, что лопасти несущего винта имеют профиль с относительной толщиной 5…20% хорды с координатами:
Технический результат достигается также тем, что лопасти несущего винта установлены с отрицательным углом конусности от 0° до -5°.
Основные препятствия для существенного повышения скорости полета современных вертолетов связаны с характерными свойствами несущего винта - увеличение зоны обратного обтекания на отступающей лопасти, формирование зон сверхзвукового обтекания на наступающей лопасти, резкое повышение нагрузок в системе управления, повышение уровня вибраций, шума и т.д. Одним из радикальных способов устранения этих проблем является использование останавливаемого несущего винта. Главным препятствием для осуществления этой идеи является сложность обеспечения необходимых уровней устойчивости и управляемости аппарата при переходе от вертолетного режима полета к самолетному и обратно. По мере уменьшения частоты вращения несущего винта увеличивается его относительная скорость (отношение физической скорости полета к окружной скорости концов лопастей несущего винта). Это сопровождается увеличением зоны обратного обтекания отступающей лопасти с соответствующим снижением ее несущих свойств. Поскольку в процессе перехода необходимо сохранять несущую способность системы в целом, то переход сопровождается возникновением опрокидывающего момента. При этом средства для компенсации этого момента отсутствуют. Установка специальных устройств для решения этой проблемы (дополнительное крыло и т.п.) приводит к ухудшению весовых и летно-технических характеристик аппарата как на вертолетном, так и на самолетном режимах.
Изобретение поясняется иллюстрациями:
фиг.1 - общий вид предлагаемого летательного аппарата;
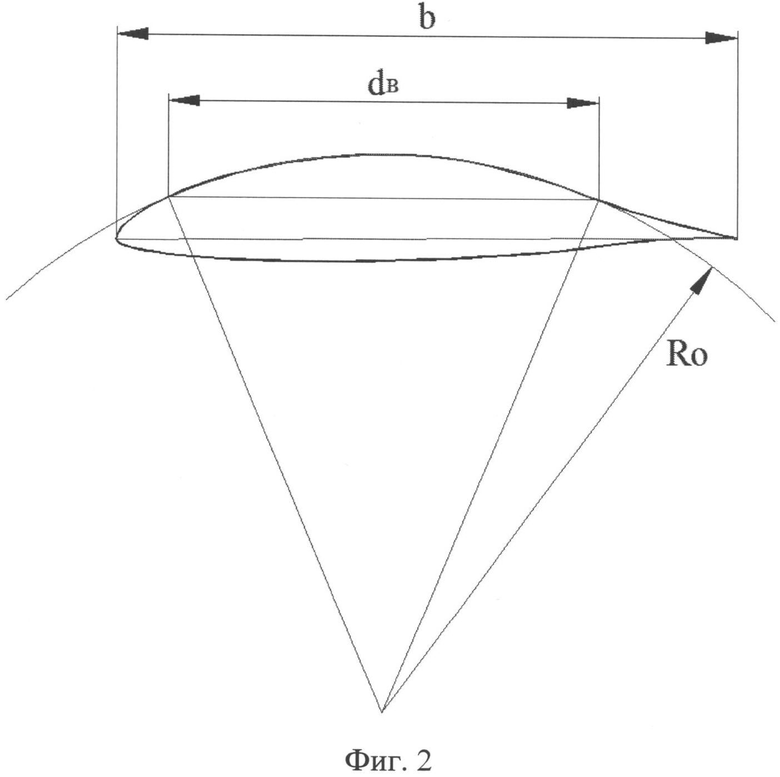
фиг.2 - пример профиля, используемого для обтекателя втулки несущего винта;
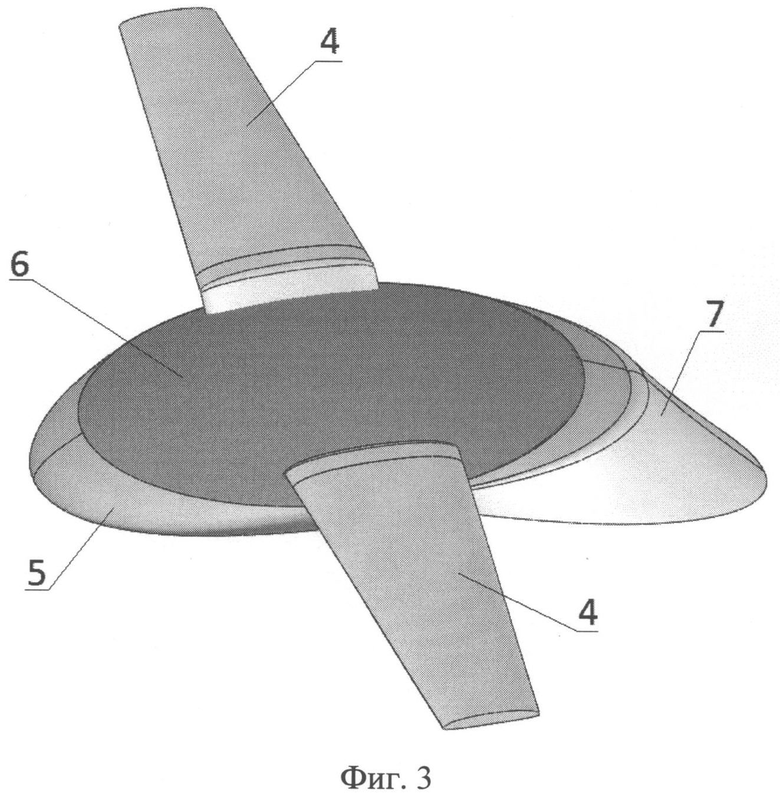
фиг.3 - несущий винт-крыло с отклоненными закрылками на неподвижной части втулки;
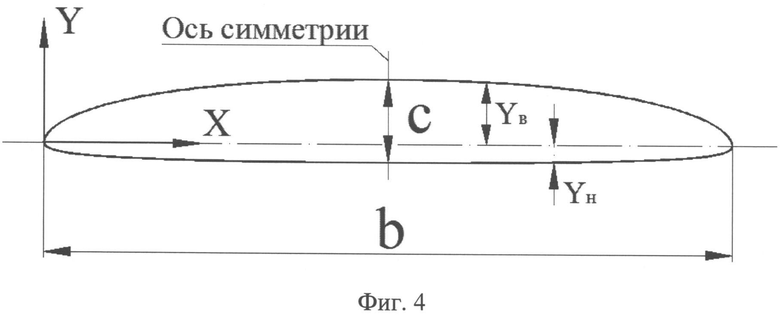
фиг.4 - профиль лопасти и упрощенной втулки несущего винта;
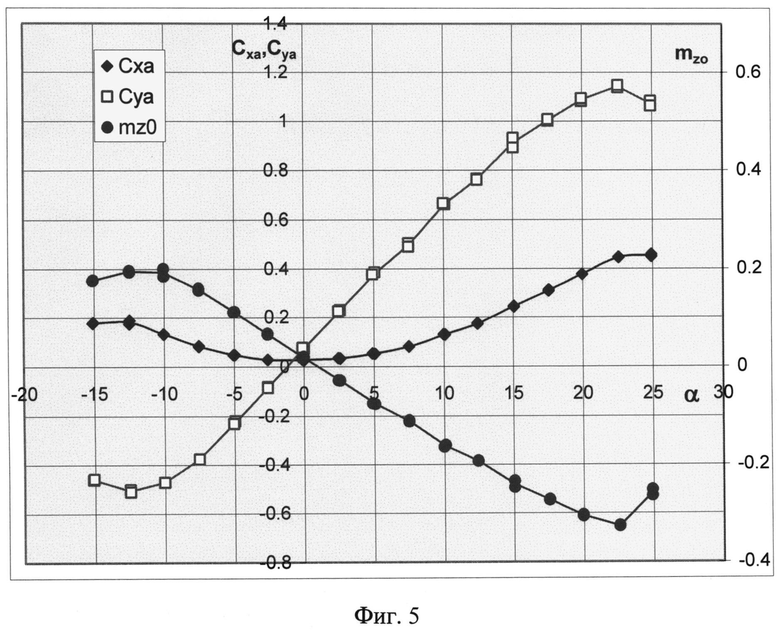
фиг.5 - аэродинамические характеристики профиля лопастей;
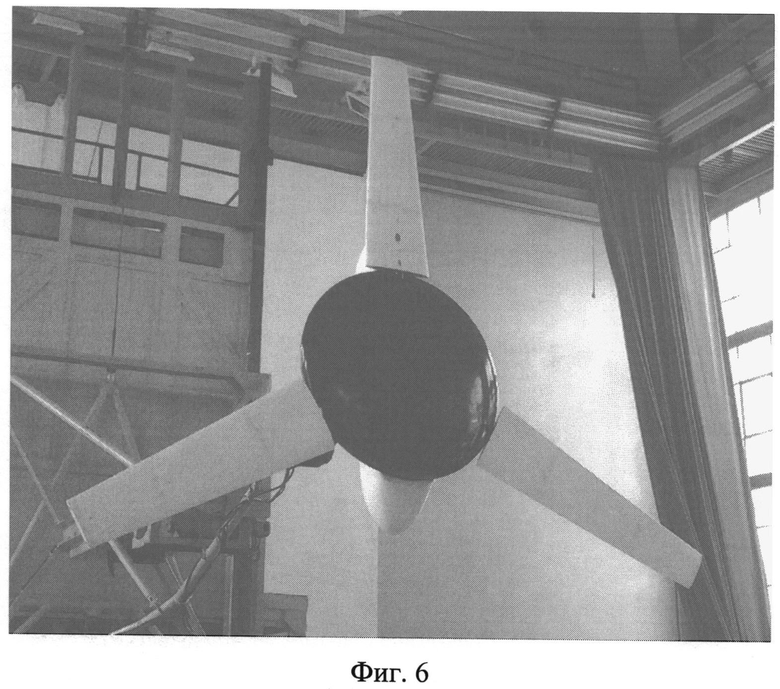
фиг.6 - модель несущей системы с упрощенной втулкой в аэродинамической трубе;
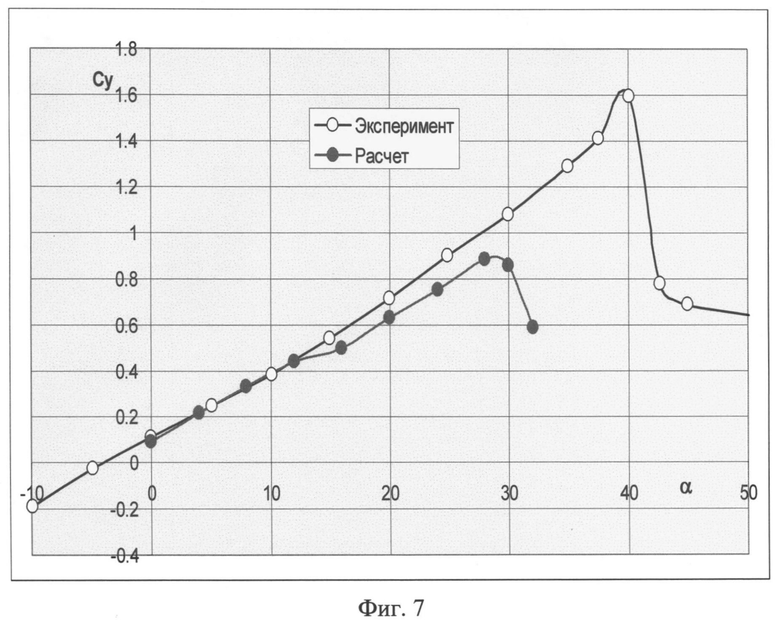
фиг.7 - экспериментальные и расчетные аэродинамические характеристики упрощенной втулки несущего винта;
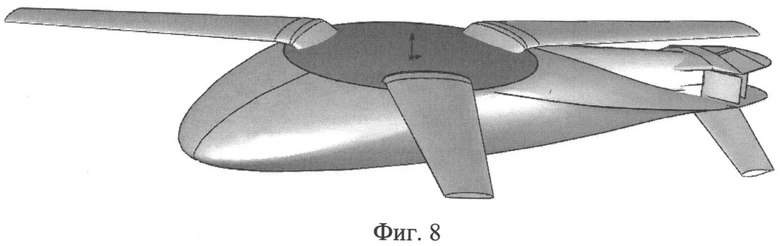
фиг.8 - общий вид летательного аппарата с несущим корпусом;
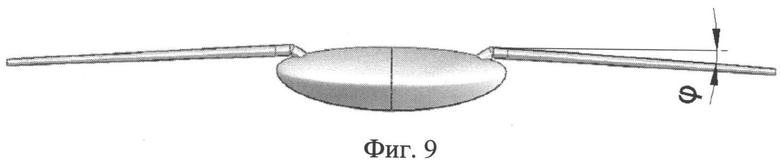
фиг.9 - установка лопастей несущего винта с отрицательным углом конусности.
На фиг.1 показан один из возможных вариантов такого аппарата. Аппарат содержит фюзеляж 1, оперение 2, устройство для компенсации реактивного момента на вертолетных режимах 3 (в данном случае - газоструйная система управления, на которую при этом возложена также функция создания необходимой пропульсивной силы на самолетных режимах). Несущая система содержит от 2 до 4 лопастей 4 (в данном случае 2 лопасти) и развитый обтекатель втулки. Обтекатель состоит из двух частей - неподвижной 5 и вращающейся 6. Фактически обтекатель представляет собой крыло малого удлинения с высоконесущим профилем. При этом целесообразно применять профиль, значительный участок верхней поверхности которого близок к дуге окружности. Это позволяет сформировать вращающуюся часть обтекателя втулки в виде сегмента сферы. Тогда в процессе перехода при вращении несущего винта геометрия крыла не изменяется и оно сохраняет свои несущие свойства. В данном варианте для обтекателя использован крыловой профиль FX67K170 (см. С.Т. Кашафутдинов, В.Н. Лушин. Атлас аэродинамических характеристик крыловых профилей. М., 1994), показанный на фиг.2, для которого характерно сочетание высокой несущей способности и аэродинамического качества. Как можно видеть на фиг.2, значительная часть его контура (dв≈0,7b), где b - хорда профиля, a dв - диаметр вращающейся части втулки, весьма близка к дуге окружности радиусом R0≈0,89b хорды профиля. Для обеспечения приемлемых параметров перехода и удовлетворительных характеристик на самолетном режиме (как показали эксперименты) вращающаяся часть обтекателя втулки должна иметь радиус 0,25÷0,5 радиуса несущего винта-крыла.
Предлагаемый летательный аппарат работает следующим образом. При старте аппарат вертикально взлетает как вертолет. Благодаря достаточно большому превышению лопастей относительно корпуса аппарата, на режиме висения и при малых скоростях полета к.п.д. несущей системы по сравнению с прототипом не ухудшается. После набора определенной скорости несущий винт постепенно останавливают. Функцию сохранения несущих свойств аппарата на переходных режимах полета выполняет специально спрофилированный развитый обтекатель втулки несущего винта. Переход осуществляют на таких режимах, при которых несущий винт работает на режиме, близком к авторотации, вся подъемная сила создается обтекателем втулки, лопасти при этом практически полностью разгружены и не создают опрокидывающих моментов. Благодаря этому упрощается управление аппаратом на переходных режимах и соответственно повышается безопасность полета. После остановки несущий винт вместе с втулкой представляет собой неподвижное крыло. Далее полет продолжают в самолетном режиме при существенно увеличенной скорости. Перед посадкой снижают скорость аппарата до необходимого уровня, постепенно раскручивают несущий винт и осуществляют вертикальную посадку на вертолетном режиме.
Как показывают результаты расчетов, значительная доля (до 40%) подъемной силы несущей системы на самолетном режиме создается обтекателем втулки. Благодаря применению для обтекателя втулки профиля (в данном примере - профиля FX67K170) с высокой несущей способностью и с малым сопротивлением аэродинамическое качество несущей системы на этом режиме выше, чем у прототипа.
Для дополнительного повышения несущей способности обтекателя используют средства повышения подъемной силы, например механизацию задней кромки обтекателя или струйные закрылки. В качестве примера на фиг.3 показана втулка с отклоненным механическим закрылком 7.
Для лопастей несущего винта-крыла преобразуемого ВКЛА используют профили, симметричные относительно передней и задней кромки с относительной толщиной 5%…20%. Обобщенные координаты такого профиля приведены в таблице 1, где b - хорда профиля, с - его максимальная толщина, Х - координата точки вдоль хорды профиля, Yв и Yн - соответствующие координаты точек верхнего и нижнего контуров профиля. На фиг.4 показан вариант такого профиля с относительной толщиной 12%.
Как показали результаты испытаний, такой профиль, несмотря на отсутствие классической задней кромки, сохраняет достаточно высокие несущие свойства при удовлетворительном аэродинамическом качестве по сравнению с классическими профилями. На фиг.5 показаны зависимости от угла атаки α аэродинамического момента mz0 относительно начала координат, коэффициента подъемной силы Суа, коэффициента сопротивления Сха в скоростной системе координат для профиля с относительной толщиной 15%, полученные при испытаниях в аэродинамической трубе.
Аналогичный профиль может быть использован для упрощенного обтекателя втулки несущего винта. На фиг.6 показана модель 3- лопастного варианта несущей системы, втулка которой образована вращением профиля с толщиной 12%. На фиг.7 показаны расчетные и экспериментальные аэродинамические характеристики данной втулки при отсутствии лопастей. Результаты исследований показывают, что высокие несущие свойства такой втулки сохраняются до больших углов атаки αкр≈40°, а максимальное значение коэффициента подъемной силы достигает Суmax≈1.6.
Профиль FX67K170, использованный для формирования обтекателя втулки, имеет относительную толщину 17%. Это позволяет при дальнейшем развитии обтекателя превратить его в несущий корпус аппарата и исключить из конструкции фюзеляж как таковой. На фиг.8 показан пример такого аппарата. Как можно видеть, объем такого несущего корпуса может быть вполне достаточным для размещения в нем всех необходимых агрегатов и полезной нагрузки. Это помогает снизить массу конструкции аппарата и улучшает его аэродинамические характеристики. Лопасти несущего винта такого аппарата, как и в первом варианте, могут выполняться с профилем, описанным выше. Аналогично предыдущему варианту аппарата вращающаяся часть обтекателя втулки должна иметь радиус 0,25÷0,5 радиуса несущего винта-крыла.
Для дополнительного улучшения характеристик несущей системы на переходных режимах в обоих вариантах выполнения аппарата используют установку лопастей с отрицательным углом конусности φ от 0° до -5°, как показано на фиг.9 (вид спереди на несущую систему аппарата). Такое решение позволяет увеличить угол атаки и соответственно несущую способность обтекателя втулки, оставляя при этом нулевым угол атаки лопасти.
Изобретение относится к области авиации, в частности к конструкциям комбинированных летательных аппаратов. Летательный аппарат содержит обтекатель втулки несущего винта, выполненный в виде несущего корпуса либо крыла малого удлинения с профилем, часть контура верхней поверхности которого близка к дуге окружности, а распределение хорды крыла вдоль размаха выбрано таким образом, что указанная часть контура профиля образует сегмент сферы, причем этот сегмент выполнен вращающимся и лопасти несущего винта закреплены на нем, а остальная часть обтекателя втулки выполнена неподвижной. Для упрощения режимов перехода лопасти устанавливают с отрицательным углом конусности. Вращающаяся часть обтекателя втулки имеет радиус 0,25÷0,5 радиуса несущего винта, а неподвижная часть обтекателя снабжена средствами повышения подъемной силы, например механизацией в виде закрылков. Лопасти несущего винта имеют профиль с относительной толщиной 5…20% хорды, симметричный относительно передней и задней кромок. Упрощенный вариант обтекателя втулки может быть выполнен в виде тела вращения, образованного поворотом аналогичного профиля относительно оси его симметрии. Достигается увеличение коэффициента полезного действия несущей системы на режиме висения. 2 н. и 10 з.п. ф-лы, 9 ил.
1. Преобразуемый летательный аппарат вертикального взлета и посадки, содержащий останавливаемый в полете несущий винт-крыло с обтекателем втулки и лопастями, фюзеляж, хвостовое оперение, силовую установку и систему управления, отличающийся тем, что обтекатель втулки несущего винта, выполненный в виде крыла малого удлинения с профилем, часть контура верхней поверхности которого близка к дуге окружности, содержит неподвижную и вращающуюся части, причем вращающаяся часть с закрепленными на ней лопастями выполнена в виде сегмента сферы, образованной вращением указанной дуги окружности.
2. Преобразуемый летательный аппарат вертикального взлета и посадки по п.1, отличающийся тем, что вращающаяся часть обтекателя втулки имеет радиус 0,25÷0,5 радиуса несущего винта-крыла.
3. Преобразуемый летательный аппарат вертикального взлета и посадки по п.1, отличающийся тем, что неподвижная часть обтекателя втулки снабжена средствами повышения подъемной силы.
4. Преобразуемый летательный аппарат вертикального взлета и посадки по п.3, отличающийся тем, что средства повышения подъемной силы выполнены в виде механических закрылков.
5. Преобразуемый летательный аппарат вертикального взлета и посадки по п.3, отличающийся тем, что средства повышения подъемной силы выполнены в виде струйных закрылков.
6. Преобразуемый летательный аппарат вертикального взлета и посадки по п.1, отличающийся тем, что лопасти несущего винта имеют профиль с относительной толщиной 5…20% хорды с координатами:
7. Преобразуемый летательный аппарат вертикального взлета и посадки по п.1, отличающийся тем, что обтекатель втулки выполнен в виде тела вращения, образованного поворотом профиля по п.6 относительно оси его симметрии.
8. Преобразуемый летательный аппарат вертикального взлета и посадки по п.1, отличающийся тем, что лопасти несущего винта установлены с отрицательным углом конусности от 0 до -5°.
9. Преобразуемый летательный аппарат вертикального взлета и посадки, содержащий останавливаемый в полете несущий винт-крыло с обтекателем втулки, хвостовое оперение, силовую установку, систему управления, отличающийся тем, что обтекатель втулки несущего винта, выполненный в виде несущего корпуса летательного аппарата с профилем, часть контура верхней поверхности которого близка к дуге окружности, содержит неподвижную и вращающуюся части с закрепленными на ней лопастями, причем вращающаяся часть выполнена в виде сегмента сферы, образованной вращением указанной дуги окружности.
10. Преобразуемый летательный аппарат вертикального взлета и посадки по п.9, отличающийся тем, что вращающаяся часть обтекателя втулки имеет радиус 0,25÷0,5 радиуса несущего винта-крыла.
11. Преобразуемый летательный аппарат вертикального взлета и посадки по п.9, отличающийся тем, что лопасти несущего винта имеют профиль с относительной толщиной 5…20% хорды с координатами:
12. Преобразуемый летательный аппарат вертикального взлета и посадки по п.9, отличающийся тем, что лопасти несущего винта установлены с отрицательным углом конусности от 0 до -5°.
| US 20100230547 A1, 16.09.2010 | |||
| СПОСОБ ПРЕОБРАЗОВАНИЯ ДИСКОВОГО КРЫЛА | 2008 |
|
RU2385267C1 |
| ОБТЕКАТЕЛЬ ВТУЛКИ НЕСУЩЕГО ВИНТА | 1991 |
|
RU2025409C1 |
| US 4573871 A, 04.03.1986 | |||

