Изобретение относится к области автоматизированного управления технологическими процессами с использованием вычислительных устройств и может применяться при выполнении экстренных вычислений при контроле чрезвычайных ситуаций на основе динамической модели катастроф для широкого класса предметно-ориентированных композитных приложений в сложной программно-аппаратной среде.
Наиболее близким техническим решением, поддерживающим разработку способа контроля чрезвычайных ситуаций на основе динамической модели катастроф, является интеллектуальная Грид-система (патент RU №2411574 от 10.02.2011), обеспечивающая системную интеграцию вычислительных и информационных компонент, формализованная логика управления которыми связана с решением ресурсоемких задач при изучении сложных явлений и закономерностей динамических систем, а также при функционировании виртуальных организаций и полигонов при выполнении сложных расчетов и моделирования с использованием блока интеллектуальной поддержки функционирования Грид-системы, взаимосвязанного посредством блока программного управления с блоками человекокомпьютерного взаимодействия и блоком прикладных Грид-сервисов, причем блок интеллектуальной поддержки содержит экспертную систему, обеспечивающую функционирование Грид-системы в заданной вычислительной среде и принятие решений по управлению вычислительными процессами, блок адаптации, реализующий процедуры адаптивного обучения за счет возможности управления вычислительным процессом с динамически меняющейся информацией, выбор предпочтительной вычислительной технологии обработки данных, настройку логических моделей на восприятие новой информации и извлечение «скрытых» знаний, генератор композитного приложения, реализующий функции выработки альтернативных решений, блок человекокомпьютерного взаимодействия, содержащий интеллектуальный интерфейс, поддерживающий взаимодействие пользователей с вычислительной средой в условиях неоднородности вычислительных ресурсов, неопределенности характеристик задачи и неполноты исходной информации.
Основным недостатком технологии обработки информации в Грид-системе применительно к задачам контроля чрезвычайных ситуаций является отсутствие компонент, обеспечивающих идентификацию и контроль ситуации на основе динамической модели катастроф [1], [2].
Техническим результатом изобретения является повышение эффективности использования программного комплекса Грид-системы за счет использования нейросетевого моделирования в высокопроизводительной среде.
Указанный технический результат достигается с помощью построения конкурирующей проблемно-ориентированной среды экстренных вычислений в целях нейросетевого моделирования чрезвычайных ситуаций и поддержки принятия решений в режиме реального времени. Принципы построения среды нейросетевого моделирования чрезвычайных ситуаций определяют динамическое формирование и контроль ресурсов (данных, прикладных пакетов и вычислительных мощностей) в распределенной вычислительной среде Грид-системы в форме генерируемых сценариев. Организация функциональных блоков для управления процессами моделирования, генерации альтернатив и приятия решений в чрезвычайных ситуациях осуществляется на основе концептуальный модели оценки вырабатываемых решений, функциональной модели программной среды, а также методов традиционного и нейросетевого моделирования и визуализации ситуаций на основе сервисно-распределенной архитектуры.
Функциональная схема, реализующая предлагаемый способ, представлена на фиг. 1. Схема включает 7 основных блоков, из них первые 4 блока реализуют интеллектуальную технологию Грид-системы, а блоки 5-7 обеспечивают контроль чрезвычайных ситуаций на основе нейросетевого моделирования в рамках динамической модели катастроф.
Блок 1 обеспечивает интеллектуальную поддержку функционирования Грид на основе экспертной системы (ЭС), генератора композитного приложения и блока адаптации.
Блок 2 осуществляет программное управление и семантический поиск по описанию задачи контроля чрезвычайной ситуации, взаимодействует с базой знаний ЭС блока 1 и получает информацию от блока 4 о доступных сервисах и их онтологических описаниях, обеспечивает вызов интерпретатора, балансировочных алгоритмов и прогнозирования времени выполнения Грид-приложений.
Блок 3 осуществляет человекокомпьютерного взаимодействия с использованием блока прикладных Грид-сервисов и обеспечивает взаимодействие с блоками 5-7.
Блок 4 прикладных Грид-сервисов обеспечивает выполнение задания на контроль чрезвычайных ситуаций и включает виртуальную оболочку проектирования, набор блоков, соответствующих основным операциям прикладных Грид-сервисов и взаимосвязей между ними, определяющих обмен данными, элемент балансировки и построения расписаний, планировщик, который на основе знаний о сервисах и исходных данных создает набор альтернативных методов построения и выбора вариантов решений и расписаний.
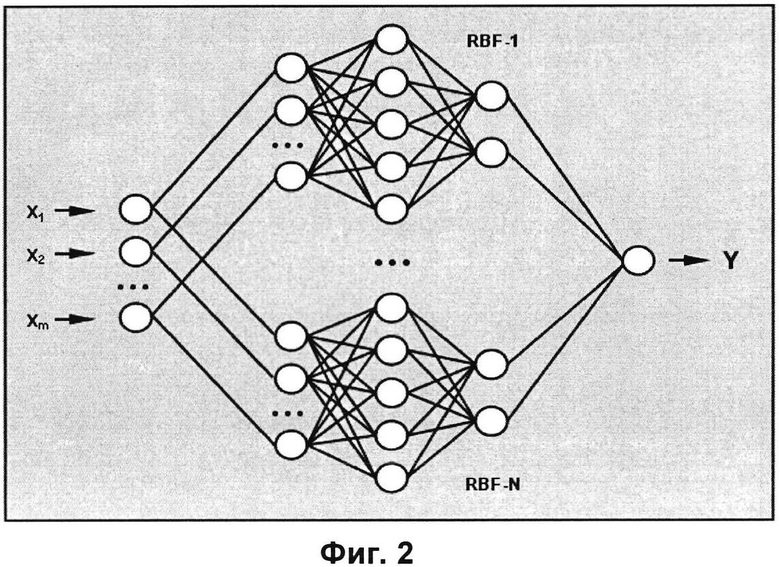
Блок 5 (фиг. 2) является функциональным блоком, реализующим процедуру идентификации текущей ситуации на основе ансамбля нейронных сетей и данных, полученных от информационной модели блока 2. В процессе идентификации устанавливается конкретная ситуация, а с помощью ЭС в блоке 1 - уровень ее опасности: угрожающая, предаварийная и аварийная (чрезвычайная) ситуация.
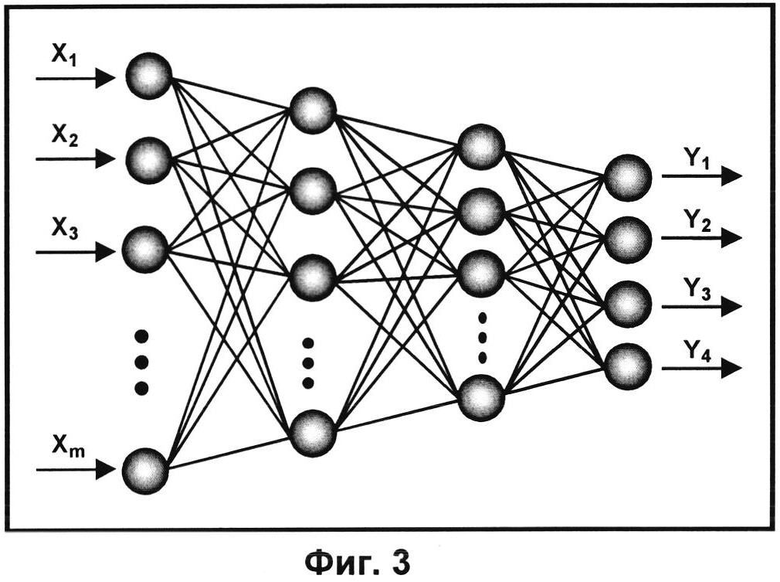
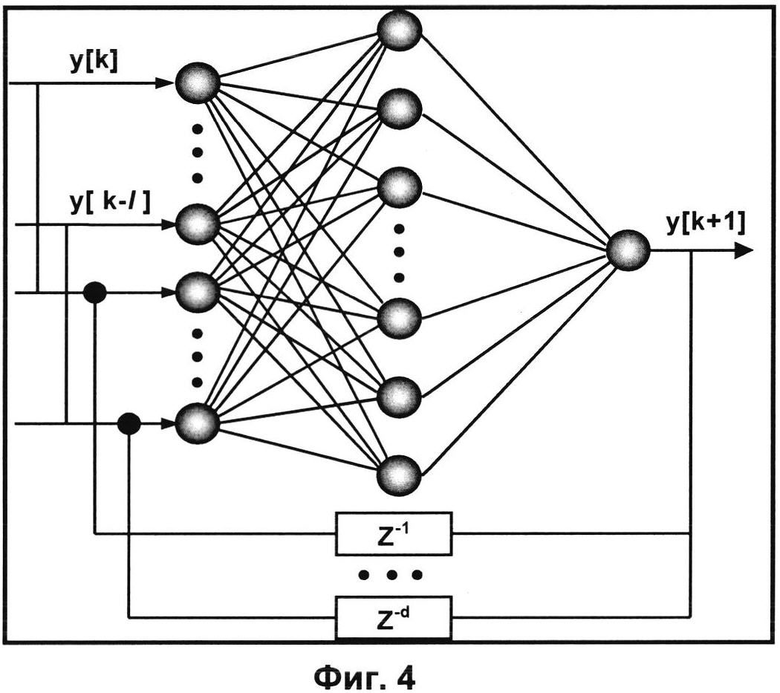
Блок 6 в зависимости от результатов работы блока 5 осуществляет контроль и прогноз текущей ситуации с помощью интерпретирующей модели, построенной на основе нейронной сети прямого распространения (фиг. 3) и прогнозирующей модели (фиг. 4), использующей нейронную сеть с обратными связями.
Блок 7 формирует управляющие воздействия, реализация которых осуществляется с помощью ЭС блока 1 в зависимости от особенностей текущей ситуации.
Способ контроля чрезвычайных ситуаций на основе интеграции вычислительных и информационных компонент Грид-системы реализуют в виде последовательности процедур:
1. На основе данных динамических измерений о возникшей чрезвычайной ситуации, хранящихся в блоке 2, формируют вектор состояния объекта контроля на заданном интервале времени [t0, tk]:

где x1, …, xn - фазовые координаты вектора состояния; т - оператор транспонирования; t0, tk - начало и конец временного интервала, определяющего поведение контролируемого объекта в заданной ситуации.
2. Для вектора (1) в функциональном блоке 5 осуществляют идентификацию текущей ситуации. Модель идентификации (фиг. 2) состоит из ансамбля радиально-базисных (Radial Basis Function - RBF) сетей, воспринимающих данные от информационной модели блока 2. Каждая сеть имеет m входов, на которые подается вектор измерений X1, …, Xn (вектор состояния) и два параметра на выходе (1 - нормальное состояние, 0 - отказ).
3. На основе результатов идентификации с помощью ЭС в блоке 1 производят оценку опасности ситуации, устанавливают необходимое информационное обеспечение и аппаратную конфигурацию для ее контроля, выделяют существенные факторы и строят вектор независимых параметров Λ(π), характеризующий режимы движения контролируемого объекта в пределах допустимой области Ω. Равновесное состояние объекта в диапазоне выделенных переменных от Λ(π)0 до Λ(π)k определяется на основе выражений:


4. Формулируют задачу контроля и прогноза развития текущей ситуации с использованием блока 6, а также блока 2 управления, генерации альтернатив и выбора решения при контроле объекта на заданном интервале [t0, tk]:

где М - модель поведения контролируемого объекта; JE - функционал качества решения; S - стратегия реализации оптимального контроля; Q - характерные ограничения и связи.
5. Задают множество исходных данных в блоках 1 и 2 для решения задачи (4):

где W, V - возмущающие воздействия (множества параметров моделей внешней среды); DO - контролируемый объект; TL - множество, определяющее время реализации управляющих воздействий для W и V; U0 и U1 - нижние и верхние границы интервала изменения управляющих воздействий; [t0, tk] - интервал контроля поведения объекта.
6. Определяют множество состояний контролируемого объекта в блоках 1 и 2:

где правая часть определяет декартово произведение множества М моделей объекта, видов функционала JE, стратегий управления S, ограничений Q и значений массива R, определяемого выражением (5).
7. Осуществляют контроль ситуации в блоках 2 и 6 с использованием оптимальной стратегии программного управления U*(opt), переводящего контролируемый объект из начального состояние в конечное, определяемое требованиями безопасности исследуемой ситуации:

Параметры контроля определяют в блоке 6 с помощью интерпретирующей нейронной сети (фиг. 3), позволяющей установить текущие значения существенных факторов, количество которых зависит от особенностей ситуации (на фиг. указаны 4 фактора). Процесс развития ситуации контролируют для выделенного существенного фактора с помощью прогнозирующей нейронной сети с обратными связями (фиг. 4) и реализуют на интервале интерпретации [t0,tk].
8. Формируют управляющее воздействие, изменяющее состояние объекта с помощью соотношений информационной модели блока 2:


где y*(Λ(π)) - вектор, характеризующий многообразие состояний, определенных в выходных данных; y0(Λ(π)0), yk(Λ(π)k) - начальное и конечное состояния равновесия DО; Λ(π) - вектор параметров (π1, …, πp), определяющих характеристики объекта и возмущающие воздействия для заданного состояния (устанавливается в пределах допустимой области Ω «входа - выхода»).
Управляющие воздействия, сформированные в блоке 7, реализуют в блоке 2 с учетом особенностей текущей ситуации: в контуре программного управления - на основе данных динамических измерений и формализованной системы знаний; в контуре адаптивного управления - с помощью параметрической настройки системы; в контуре самообучения - на основе текущей и накопленной информации о динамике взаимодействия в нестандартных (нештатных и экстремальных) ситуациях.
9. Определяют время, необходимое для выработки и принятия решения, в виде суммы компонент по данным блоков 2 и 7:

где tsupp - время формирования интеллектуальной поддержки; tInf - время восприятия информации; tDec - время принятия решения.
10. Производят сравнительную оценку безопасного времени нахождения контролируемого объекта в критической ситуации на основе ЭС блока 1 с учетом данных блоков 6, 7:

где τCR=τ(y(t)=ymin) - время нахождения объекта в критической ситуации, определенное по результатам прогноза в блоке 6; y(t) - текущее значение определяющего параметра на выходе нейронной сети (фиг. 4); ymin - допустимое значение определяющего параметра.
Способ контроля чрезвычайных ситуаций на основе интеграции вычислительных и информационных компонент Грид-системы на основе нейросетевого моделирования динамических ситуаций с использованием процедур (1) - (11) осуществляют следующим образом. В блоке 2 на основе многоуровневого интерфейса формируют команду на начало контроля чрезвычайной ситуации, которая передается в ЭС блока 1, блок управления вычислениями 2 и блок идентификации 5, с помощью которого устанавливают конкретную ситуацию, подлежащую контролю, и на основе данных о ее опасности, полученных от ИС, формируют описания задачи в терминах предметной области и передают их в блок 4 формирования информационного, программного и аппаратного обеспечения контроля ситуации с использованием композитного приложения и прикладных сервисов, а также блок 6 оперативного контроля и прогноза развития ситуации, в котором на основе интерпретирующей и прогнозирующей нейросетевых моделей обеспечивается выделение и контроль существенных факторов, результаты которого передаются в блоки 5 и 7, где определяется множество состояний контролируемого объекта и осуществляется разработка и реализация сценариев стратегических решений, на основе которых в блоке 6 производится визуализация ситуации, результаты которой передаются в блок 1, где определяется время, затраченное на интеллектуальную поддержку, выработку и принятия решения, которое сравнивается с временем нахождения объекта в текущей ситуации с учетом допустимых значений определяющих параметров при совместном использовании данных блоков 1 и 6, а окончательный результат решения поставленной задачи из блока 7 помещается в базу данных ЭС блока 1.
В качестве примера рассмотрим результаты контроля критической ситуации, связанной с ухудшением остойчивости судна на попутном волнении. Оценка выполнялись с помощью нейронных сетей (фиг. 3) и для параметров посадки судна и метацентрической высоты, а прогноз (фиг. 4) - для критического интервала времени нахождения судна в экстремальной ситуации. Результаты анализа представлены в табличной форме (табл. 1-3). Табл. 1 содержит результаты идентификации ситуации, табл. 2 - данные контроля динамических характеристик, а табл. 3 - оценку критического интервала времени нахождения судна в экстремальной ситуации.

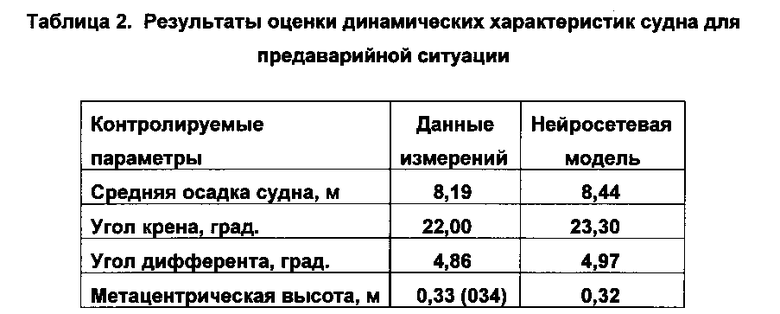
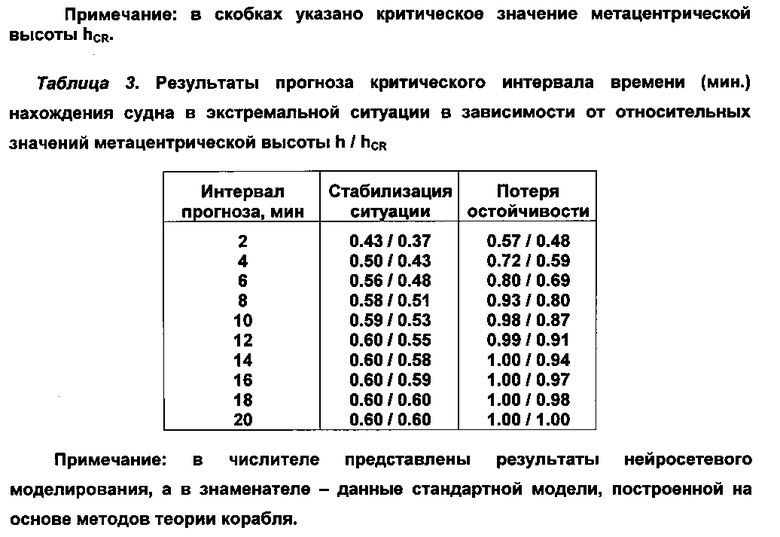
Из приведенных в табл. 1-3 данных следует, что нейросетевой алгоритм во многих случаях приводит к менее оптимистичным значениям контролируемого параметра, при этом разброс данных для рассматриваемых вычислительных технологий достигает 15%. Критический интервал времени при стабилизации ситуации составляет 12 мин для нейросетевой и 18 мин для стандартной модели, а в случае потери остойчивости - 14 и 20 мин соответственно.
Таким образом, в результате использования предлагаемого изобретения формируется гибкое информационное пространство контроля чрезвычайной ситуации, включающее методы концептуального моделирования, автоматизированные циклы интерпретации чрезвычайных ситуаций, формализуемые на основе совместного использования инфраструктур в рамках задачи размещения данных в динамической среде Грид-системы.
Изобретение относится к области автоматизированного управления технологическими процессами и может применяться для экстренных вычислений при контроле чрезвычайных ситуаций на основе динамической модели для широкого класса предметно-ориентированных приложений в сложной программно-аппаратной среде. Технический результат - повышение быстродействия при ликвидации опасной ситуации. Способ состоит в следующем: формируют на пульте блока управления команду на организацию контроля чрезвычайной ситуации на основе Грид-системы и функционального блока, реализующего идентификацию текущей ситуации с помощью нейронных сетей, и оценку опасности ситуации в зависимости от уровня действующих возмущений, блока оперативного контроля и прогноза развития ситуации на основе интерпретирующей и прогнозирующей нейросетевых моделей вырабатывают стратегические решения по интеллектуальной поддержке контроля ситуаций на основе управляющих воздействий в зависимости от особенностей ситуации в контурах программного и адаптивного управления, а также в контуре самообучения, определяют время, необходимое для выработки и принятия решения, и производят оценку безопасного времени нахождения объекта в текущей ситуации с учетом допустимых значений определяющих параметров. 4 ил., 3 табл.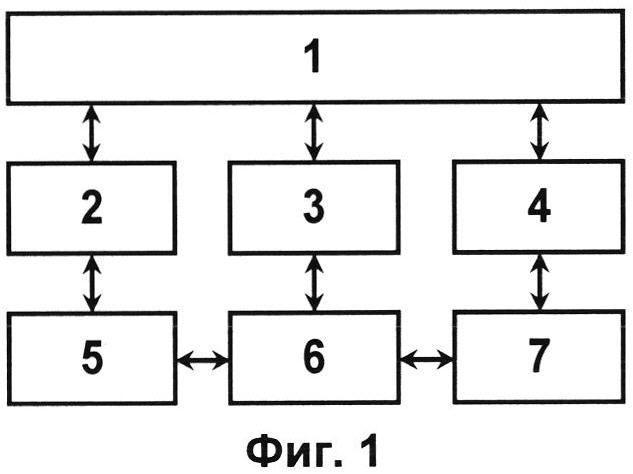
Способ контроля чрезвычайных ситуаций на основе интеграции вычислительных и информационных компонент Грид-системы, формализованная логика управления которыми связана с решением ресурсоемких задач при изучении сложных явлений и закономерностей динамических систем, а также при функционировании виртуальных организаций и полигонов при выполнении сложных расчетов и моделирования с использованием блока интеллектуальной поддержки функционирования Грид-системы, взаимосвязанного посредством блока программного управления с блоками человеко-компьютерного взаимодействия и блоком прикладных Грид-сервисов, причем блок интеллектуальной поддержки содержит экспертную систему, обеспечивающую функционирование Грид-системы в заданной вычислительной среде и принятие решений по управлению вычислительными процессами, блок адаптации, реализующий процедуры адаптивного обучения за счет возможности управления вычислительным процессом с динамически меняющейся информацией, выбор предпочтительной вычислительной технологии обработки данных, настройку логических моделей на восприятие новой информации и извлечение «скрытых» знаний, генератор композитного приложения, реализующий функции выработки альтернативных решений, блок человеко-компьютерного взаимодействия, содержащий интеллектуальный интерфейс, поддерживающий взаимодействие пользователей с вычислительной средой в условиях неоднородности вычислительных ресурсов, неопределенности характеристик задачи и неполноты исходной информации, отличающийся тем, что дополнительно используется функциональный блок, реализующий идентификацию текущей ситуации с помощью ансамбля нейронных сетей и оценку опасности ситуации в зависимости от уровня действующих возмущений, а также блок оперативного контроля и прогноза развития ситуации на основе интерпретирующей и прогнозирующей нейросетевых моделей, обеспечивающих контроль существенных факторов в задачах планирования операций, выделение множества состояний контролируемого объекта и выработку стратегических решений, причем интеллектуальная поддержка контроля ситуаций в рамках концепции раннего реагирования реализована на основе управляющих воздействий в контуре программного управления на основе данных динамических измерений и формализованной системы знаний, в контуре адаптивного управления - с помощью параметрической настройки системы и в контуре самообучения - на основе информации о динамике взаимодействия, определяют время, необходимое для выработки и принятия решения, и производят сравнительную оценку безопасного времени нахождения объекта в текущей ситуации с учетом допустимых значений определяющих параметров.
| ИНТЕЛЛЕКТУАЛЬНАЯ ГРИД-СИСТЕМА ДЛЯ ВЫСОКОПРОИЗВОДИТЕЛЬНОЙ ОБРАБОТКИ ДАННЫХ | 2009 |
|
RU2411574C2 |
| US 7813822 B1, 12.10.2010 | |||
| Воздухораспределительное устройство | 1961 |
|
SU148692A1 |

