Изобретение относится к диагностическим системам и предназначено для диагностирования информационно-преобразующих элементов бортового оборудования воздушного судна на основе машинного обучения. Способ позволяет реализовать процесс автоматического составления диагностических моделей информационно-преобразующих элементов бортового оборудования любой сложности с увеличением глубины поиска места отказа при отказах систем комплекса бортового оборудования.
Известен метод диагностирования, реализуемый в экспертной системе (ЭС) функционального диагностирования авиационного радиоэлектронного оборудования [патент на полезную модель №77062 U1, G06F 15/00]. Данная ЭС содержит управляющий микропроцессор, измерительный блок, содержащий в своем составе первичные измерительные преобразователи (ПИП), вычислительную систему, включающую подсистему обработки информации (ПОИ), базу данных, систему управления базой данных (СУБД), базу знаний, базу экспертных знаний (БЭЗ), нейросетевую базу знаний (НСБЗ), систему управления базой знаний (СУБЗ), решатель (интерпретатор). Известная ЭС является вычислительной системой, в которую включены знания специалистов о некоторой конкретной проблемной области и которая в пределах этой области способна принимать экспертные решения. ЭС состоит из вычислительной системы и внешних устройств; управляющего микропроцессора, измерительного блока. Вычислительная система содержит базу знаний, базу данных, машину логического вывода (решатель, подсистему приобретения знаний и подсистему объяснений).
ЭС, построенная по указанному принципу, имеет следующие свойства: ЭС ограничена определенной сферой экспертизы - решение задач контроля и диагностики технического состояния бортового оборудования ЛА, способна рассуждать при сомнительных данных и объяснять полученные решения понятным способом, знания, которыми она оперирует, и механизм вывода - средство обработки знаний - отделены друг от друга, целенаправленна на использование правил, на выходе выдает совет, а не информацию, которая подлежит трудоемкой обработке пользователем, строится так, чтобы имелась возможность постоянного наращивания системы. В ЭС диагностирования функции подсистемы приобретения знаний выполняет база знаний, а подсистема объяснений выполняет функции решателя машина логического вывода (МЛВ) (интерпретатор).
Предлагаемая ЭС позволяет, используя метод функционального диагностирования, проводить непрерывный анализ технического состояния объектов ЛА в процессе их работы по назначению, оперативно получать информацию о техническом состоянии бортового оборудования ЛА, позволяет проводить работы по диагностированию без нарушения функциональных связей.
ЭС, наряду с использованием традиционных знаний, хранящихся в БЗ, используя нейросетевую базу, позволяет формализовать перечисленные выше проблемы, возникающие в процессе эксплуатации авиационного оборудования. Проблема сложности объектов в нейросетевой базе знаний решается на основе обучения погрешности измерений, отказы первичных измерений-преобразователей информации могут компенсироваться на основе моделей ассоциативной нейронной сети (аналитическая избыточность).
Основным недостатком описанного метода диагностирования является наличие и использование за основу субъективных знаний экспертов ЭС в некоторой конкретной области, что при составлении диагностических моделей, и наличии человеческого фактора, а также невозможности точного прогнозирования процессов изменения технического состояния авиационного радиоэлектронного оборудования в рамках его жизненного цикла, может приводить к неточности осуществления процесса диагностирования. Также, недостатком данного метода является неавтономность обучения искусственной нейронной сети, используемой в ЭС, с целью формирования нейросетевой базы знаний. Отсутствие автоматизированности процесса формирования такой базы предполагает обучение с учителем: при обучении искусственной нейронной сети необходимо участие человека (оператора).
Однако сложность объекта контроля и диагностики, большая часть параметров которого не измеряется, содержит случайные (инструментальные и методические) погрешности. Чрезмерная сложность и отсутствие точной математической модели, существование критических (нерасчетных) режимов работ авиационного оборудования вызывает комплексные отказы измерителей и преобразователей системы. Все перечисленные выше проблемы снижают достоверность диагностирования технического состояния авиационного бортового оборудования. Также усложнение и увеличение элементной базы ЭС приводит к снижению надежности, отказоустойчивости и стойкости метода диагностики к изменяющимся внешним факторам.
Известен наиболее близкий к заявляемому методу - метод резервирования каналов конструктивно-функциональных модулей бортовых цифровых вычислителей летательных аппаратов на основе интеллектуальной диагностической системы в условиях интегрированной модульной авионики [патент на изобретение №2778366 C1, G06F 11/20]. Способ обеспечивает повышение отказоустойчивости за счет применения многоканального мониторинга интеллектуальной диагностической системой в режиме реального масштаба времени каналов обработки программного кода КФМ, что позволяет при достижении значения контролируемого параметра программного кода границ допусков функциональной зависимости (границ работоспособного состояния) заблаговременно реконфигурировать отказавший информационный канал КФМ (канал, в котором возник сбой) и использовать интеллектуальную диагностическую систему (ИДС) в режиме работы отказавшего канала БЦВС с индикацией о реконфигурации на функционирование ИДС летному экипажу. Технический результат рассматриваемого метода достигается тем, что в методе резервирования каналов КФМ БЦВС на основе ИДС реализуется принцип функционирования в интересах решения задачи автоматического построения модели подлежащего программной реконфигурации канала обработки информации за счет применения систем искусственного интеллекта, управляемого нейроконтроллером, что позволяет заблаговременно реконфигурировать отказавший канал КФМ на доступные вычислительные ресурсы ИДС в режиме БЦВС. При этом в ИДС происходит обучение (формирование моделей правильного функционирования КФМ БЦВС, функционирования в предотказном состоянии, функционирования в режиме отказа); запоминание (создание базы данных, включающих сформированные модели правильного функционирования КФМ с учетом упреждающих допусков), а также работа в режиме имитации БЦВС.
Недостатком данного метода является его узкая применяемость -предназначение заключается только для диагностирования и резервирования отказавших каналов КФМ БЦВС.
Способ обеспечивает решение задачи диагностики бортового оборудования, которая позволяет выявить неисправности оборудования, а также уменьшить время поиска места и причин отказа за счет применения многоканального контроля информационно-преобразующих элементов комплекса бортового оборудования нейросетевым классификатором состояний, программное обеспечение которого реализуется на основе алгоритмов функционирования искусственных нейронных сетей Кохонена, в режиме реального масштаба времени, что позволяет создавать на этапе испытаний комплекса бортового оборудования диагностические модели каждого информационно-преобразующего элемента (до конструктивно-съемной единицы), с целью их диагностирования способом классификации состояний искусственными нейронными сетями Кохонена с применением методов машинного обучения.
Технический результат изобретения достигается тем, что в способе диагностирования информационно-преобразующих элементов бортового оборудования воздушного судна на основе машинного обучения реализуется принцип функционирования в интересах решения задачи автоматического построения диагностических моделей, подлежащих контролю информационно-преобразующих каналов элементов бортового оборудования. Процесс реализуется на отдельном однопроцессорном унифицированном вычислительном модуле открытой архитектуры с применением стандарта ARINC 429, а также с использованием методов машинного обучения искусственных нейронных сетей Кохонена и устройства управления и коммутации (нейроконтроллер), что позволяет увеличить глубину поиска места отказа при наземном контроле, и, как следствие, уменьшить время восстановление комплекса, тем самым повысить его надежность. При этом в нейросетевом классификаторе состояний Кохонена, реализованном на отдельном вычислительном модуле, происходит обучение (формирование кластеров, определяющих вид состояния каждого информационно-преобразующего элемента: кластер предотказного состояния, кластер состояния отказа); запоминание (создание базы данных, включающих сформированные диагностические модели правильного функционирования информационно-преобразующих элементов); отнесение данных контроля к одному из сформированных кластеров состояний, в том числе предотказного состояния и состояния отказа; распознавание состояния, а также распределение текущей информации по кластерам.
Сущность изобретения заключается в том, что в нейросетевом классификаторе состояний, построенном на основе функционирования алгоритмов искусственных нейронных сетей Кохонена, представленного в виде программного кода, и отдельного вычислительного модуля, происходит его автоматическое обучение в режиме реального масштаба времени. С определенной дискретностью через модуль формирования обучающей выборки, содержащий энергонезависимое постоянное запоминающее устройство (ПЗУ), через интегрированную локальную сеть бортового оборудования поступают числовые массивы данных входных и выходных сигналов каждого информационно-преобразующего элемента бортового оборудования, с последующим автоматическим распределением входной информации по кластерам. Предлагаемый способ диагностирования информационно-преобразующих элементов бортового оборудования воздушного судна на основе машинного обучения, представляющий собой нейросетевой классификатор состояний Кохонена, реализуется на стандартном крейте (платформе), в виде отдельного однопроцессорного вычислительного модуля унифицированной и открытой архитектуры (стандарт ARINC 429), в основе функционирования которого заложены алгоритмы обработки входной информации многослойными искусственными нейронными сетями кластеризации Кохонена, программное обеспечение функционирования которых хранится в энергонезависимом ПЗУ модуля и используется по назначению в режиме реального времени при поадресном взаимодействии с информационно-преобразующими элементами бортового оборудования через интегрированную локальную сеть бортового оборудования комплекса.
На фиг. 1 показана структурная схема нейросетевого классификатора состояний Кохонена во взаимодействии с информационно-преобразующими элементами бортового оборудования воздушного судна и интегрированной локальной сетью бортового оборудования в виде мультиплексного канала информационного обмена (МКИО) комплекса: Д1, Д2, …, Дn - датчики систем; ПУОИ1;n - первичные устройства обработки (преобразования) информации; ИМ1, ИМ2, …, ИМПn - исполнительные механизмы; БУР - бортовое устройство регистрации параметрической информации общего назначения; САС - система аварийной, предупреждающей и уведомляющей сигнализации; СОИ1;n - системы отображения информации; x1…xj - поадресные входные сигналы от информационно-преобразующих элементов; y1…yi - поадресные выходные сигналы от информационно-преобразующих элементов; {X},{Y} - множества измеряемых входных и выходных параметров,  - критерий минимума ошибки (функция минимизации отклонения входных данных X от синаптических весовых коэффициентов Wi); S0,S1,S2 - технические состояния конкретного информационно-преобразующего элемента (отнесение к определенному кластеру). Данная структура раскрывает способ взаимодействия нейросетевого классификатора состояний Кохонена с информационно-преобразующими элементами бортового оборудования воздушного судна и интегрированной локальной сетью бортового оборудования в виде мультиплексного канала информационного обмена (МКИО) комплекса.
- критерий минимума ошибки (функция минимизации отклонения входных данных X от синаптических весовых коэффициентов Wi); S0,S1,S2 - технические состояния конкретного информационно-преобразующего элемента (отнесение к определенному кластеру). Данная структура раскрывает способ взаимодействия нейросетевого классификатора состояний Кохонена с информационно-преобразующими элементами бортового оборудования воздушного судна и интегрированной локальной сетью бортового оборудования в виде мультиплексного канала информационного обмена (МКИО) комплекса.
На фиг. 2 показан показана реализация устройства управления и коммутации (нейроконтроллера) с прямым инверсным нейроуправлением. Посредством нейроконтроллера осуществляется нейроуправление дискретизацией поадресного формирования обучающих данных при взаимодействии с каждым информационно-преобразующим элементом комплекса. Достоинством прямого инверсного нейроуправления являются возможность обучения в режиме offline и отсутствие необходимости в точной математической модели информационно-преобразующих элементов: y(k) - выходной сигнал канала конкретного информационно-преобразующего элемента; um(k) - управляющий сигнал ИНС; Δ - ошибка управления; u(t) - тестовый сигнал (случайный); Х(k-1) - предыдущее состояние объекта управления; eu(k) - ошибка обучения. Задавая соответствующий алгоритм обучения для нейросетевого классификатора состояний, функционирующего на основе алгоритмов искусственных нейронных сетей Кохонена, производится автоматический подбор синаптических весовых коэффициентов с целью корректировки процедуры обучения нейроконтроллера по сигналам информационно-преобразующих элементов и корректирующего воздействия.
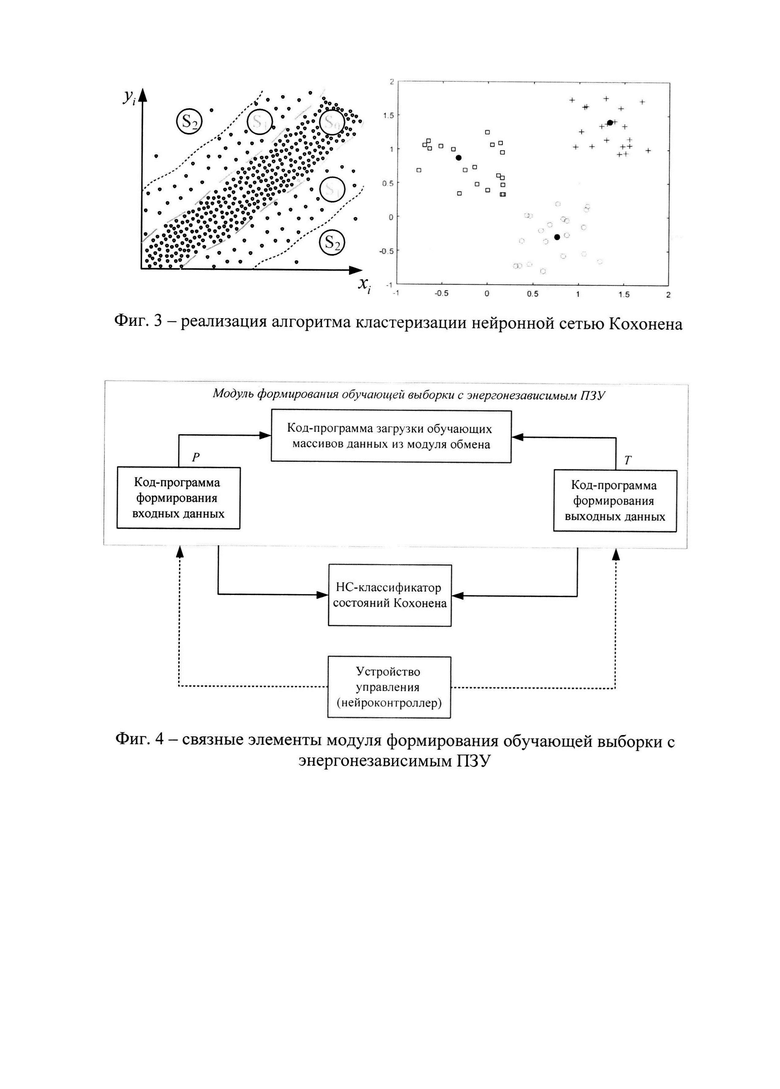
На фиг. 3 показана реализация алгоритма кластеризации нейронной сетью Кохонена, различающего состояния S0,S1,S2: S0 - область работоспособных состояний; S1 - область предотказных состояний; область состояний отказа. При тестировании искусственной нейронной сети Кохонена, входящей в состав программной части нейросетевого классификатора состояний, данные распределяются по трем кластерам, центром каждого из которых являются черные точки на графике.
На фиг. 4 показаны связные элементы модуля формирования обучающей выборки с энергонезависимым ПЗУ. Модуль формирования обучающей выборки во взаимодействии с нейросетевым классификатором состояний Кохонена и нейроконтроллером включает в себя: код-программу загрузки обучающих массивов данных в модуль обмена; код-программу формирования входных данных (Р); код-программу формирования выходных данных (T). Работа указанных программ позволяет загрузить обучающие данные информационно-преобразующих элементов комплекса из модуля обмена, с целью их дальнейшей обработки.
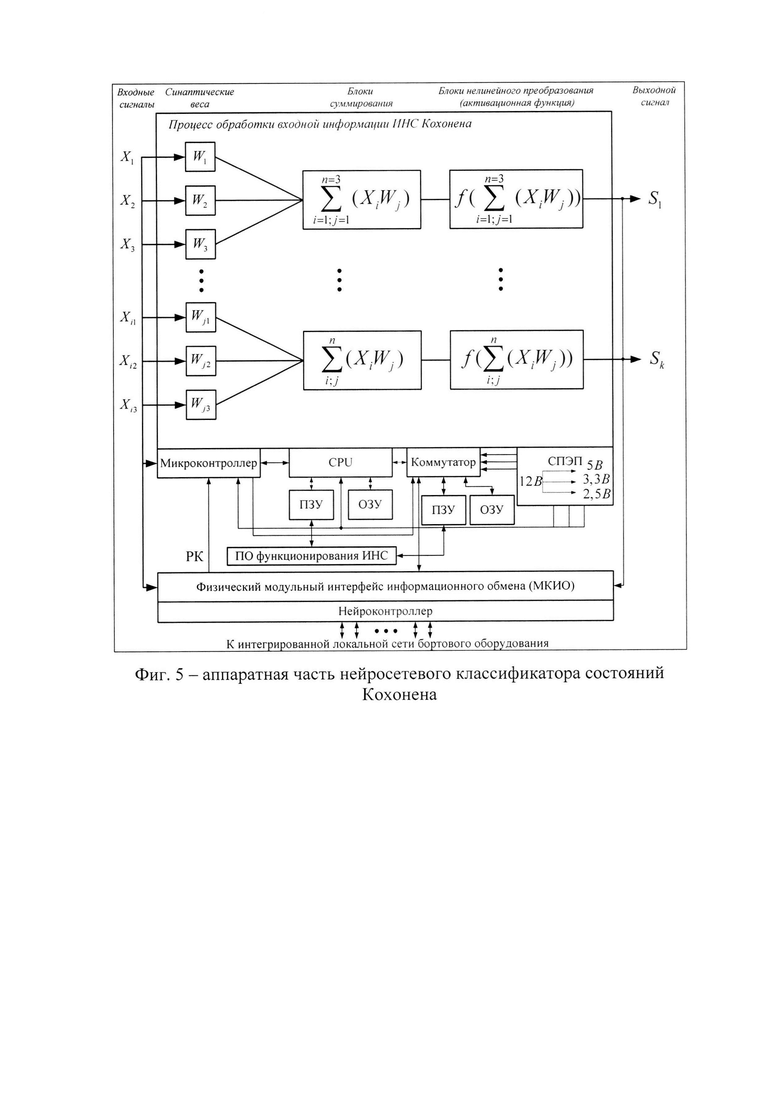
На фиг. 5 показана архитектура построения аппаратной части нейросетевого классификатора состояний Кохонена: X1,X2,X3,Xi1,Xi2,Xi3 - входные сигналы системы от КФМ; W1,W2,W3,Wj1,Wj2,Wj3 - синаптические весовые коэффициенты ИНС Кохонена;  - блоки суммирования;
- блоки суммирования;  - блоки нелинейного преобразования (активационная функция ИНС Кохонена); Y1,…,Yk - выходные (обработанные ИНС) сигналы системы; CPU - центральный процессор системы ИДС; ПЗУ - постоянное запоминающее устройство; ОЗУ - оперативное запоминающее устройство; СПЭП - система преобразования электрического питания системы; РК - разовая команда; ПО функционирования ИНС - программное обеспечение функционирования искусственных нейронных сетей Кохонена; S1,Sk - состояния информационно-преобразующих элементов комплекса.
- блоки нелинейного преобразования (активационная функция ИНС Кохонена); Y1,…,Yk - выходные (обработанные ИНС) сигналы системы; CPU - центральный процессор системы ИДС; ПЗУ - постоянное запоминающее устройство; ОЗУ - оперативное запоминающее устройство; СПЭП - система преобразования электрического питания системы; РК - разовая команда; ПО функционирования ИНС - программное обеспечение функционирования искусственных нейронных сетей Кохонена; S1,Sk - состояния информационно-преобразующих элементов комплекса.
Способ реализуется следующим образом.
При подаче электропитания от системы преобразования электропитания, центральный процессор (CPU) выполняет инициализацию входящих в ее состав компонентов (микросхем программируемой логики, микроконтроллера). Начало процесса обучения системы осуществляется подачей разовой команды (РК) в микроконтроллер, и, согласно установленному протоколу информационного обмена между бортовой локальной сетью информационно-преобразующего комплекса, через интегрированную локальную сеть бортового оборудования и коммутатор в постоянном запоминающем устройстве формируется база файлов эталонных входных и выходных массивов данных при работе каждого конкретного информационно-преобразующего элемента с установленной адресацией ячеек ПЗУ. После инициализации центральный процессор (CPU) принимает из постоянного запоминающего устройства (ПЗУ) функциональное программное обеспечение ИНС Кохонена, и по внутренней локальной сети и заносит его в свое внутреннее оперативное запоминающее устройство (ОЗУ). При формировании базы данных эталонных обучающих массивов входов и выходов диагностируемых информационно-преобразующих элементов, входные и выходные сигналы, обработанные соответствующим алгоритмом нейросетевого классификатора состояний, через физический модульный интерфейс информационного обмена (МКИО) и коммутатор поадресно формирует в ячейках ПЗУ файлы алгоритм-программ кластеров состояний каждого информационно-преобразующего элемента. После обучения нейросетевой классификатор состояний используется как система активного мониторинга функционирования информационно-преобразующих элементов. При распределении тестовых данных к кластеру предотказных состояний (состояний отказа) устройство управления и коммутации (нейроконтроллер), фиксируя данное отклонение, подает управляющее воздействие на индикацию с указанием кода системы и кода отказавшего элемента.
Задача диагностирования информационно-преобразующих элементов бортового оборудования воздушного судна решается использованием в нейросетевом классификаторе состояний искусственных нейронных сетей (слоев) Кохонена, а также многослойных однонаправленных искусственных нейронных сетей прямого распространения с сигмоидальной функцией активации нейронов в скрытом слое, и линейной функцией активации нейронов в выходном слое в нейроконтроллере. В нейросетевом классификаторе состояний Кохонена нейроны активного слоя не упорядочены. В процессе обучения подстраиваются веса только одного нейрона-победителя каждой ИНС для информационно-преобразующих элементов. Каждый i-й нейрон 2-го слоя имеет собственный вектор весов Wi, который сравнивается с входным вектором X. Сравнение подразумевает вычисление расстояния между X и Wi, так что в слое Кохонена появляется нейрон-победитель с номером j, веса которого имеют минимальное расстояние до входного вектора:

В качестве метрики здесь может выступать евклидово расстояние

Если векторы X и W нормализованные, то в качестве меры близости можно использовать скалярное произведение, и тогда выход нейрона можно описать формулой

и выход нейрона j оказывается максимальным при одинаковых X и W:

Нормализация векторов выполняется по формулам

Результатом работы слоя конкурирующих нейронов в структуре программной части нейросетевого классификатора при подаче на входной слой некоторого вектора X является определение нейрона, который имеет наибольший выходной сигнал yj (нейрон-победитель). Этот нейрон обладает весовым вектором Wj, который наиболее близок к входному вектору. Нейроны слоя Кохонена работают не изолированно, между ними существуют соревновательные связи, с помощью которых близкие нейроны усиливают сигналы друг друга.
Преимущество использования способа диагностирования информационно-преобразующих элементов бортового оборудования воздушного судна на основе машинного обучения состоит в автоматизации составления диагностических моделей любой сложности с увеличением глубины поиска места отказа комплекса бортового оборудования воздушного судна до уровня конструктивно-съемных единиц, за счет обучения самоорганизующихся искусственных нейронных сетей Кохонена без учителя, что позволяет автоматизировать составление диагностических моделей и не ограничивать поиск места отказа, заложенными в них экспертными данными.
Таким образом, процесс диагностирования в приведенном способе реализуется на отдельном однопроцессорном унифицированном вычислительном модуле открытой архитектуры с применением стандарта ARINC 429, а также с использованием методов машинного обучения искусственных нейронных сетей Кохонена и устройства управления и коммутации (нейроконтроллер), что позволяет увеличить глубину поиска места отказа при наземном контроле, и, как следствие, уменьшить время восстановление комплекса, тем самым повысить его надежность. При этом в нейросетевом классификаторе состояний Кохонена, реализованном на отдельном вычислительном модуле, происходит обучение (формирование кластеров, определяющих вид состояния каждого информационно-преобразующего элемента: кластер предотказного состояния, кластер состояния отказа); запоминание (создание базы данных, включающих сформированные диагностические модели правильного функционирования информационно-преобразующих элементов); отнесение данных контроля к одному из сформированных кластеров состояний, в том числе предотказного состояния и состояния отказа; распознавание состояния, а также распределение текущей информации по кластерам.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ТЕХНИЧЕСКОГО ДИАГНОСТИРОВАНИЯ КОМПЛЕКСА БОРТОВОГО ОБОРУДОВАНИЯ ВОЗДУШНЫХ СУДОВ НА ОСНОВЕ МАШИННОГО ОБУЧЕНИЯ | 2024 |
|
RU2831917C1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ КОМПЛЕКСА БОРТОВОГО ОБОРУДОВАНИЯ ВОЗДУШНЫХ СУДОВ НА ОСНОВЕ МАШИННОГО ОБУЧЕНИЯ | 2023 |
|
RU2809719C1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ КОМПЛЕКСА БОРТОВОГО ОБОРУДОВАНИЯ ВОЗДУШНЫХ СУДОВ НА ОСНОВЕ МАШИННОГО ОБУЧЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2023 |
|
RU2816667C1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ КОМПЛЕКСА БОРТОВОГО ОБОРУДОВАНИЯ ВОЗДУШНЫХ СУДОВ НА ОСНОВЕ МАШИННОГО ОБУЧЕНИЯ БЕЗ УЧИТЕЛЯ С АВТОМАТИЧЕСКИМ ОПРЕДЕЛЕНИЕМ ПАРАМЕТРОВ ОБУЧЕНИЯ МОДЕЛЕЙ | 2023 |
|
RU2818858C1 |
| МЕТОД РЕЗЕРВИРОВАНИЯ КАНАЛОВ КОНСТРУКТИВНО-ФУНКЦИОНАЛЬНЫХ МОДУЛЕЙ БОРТОВЫХ ЦИФРОВЫХ ВЫЧИСЛИТЕЛЕЙ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА ОСНОВЕ ИНТЕЛЛЕКТУАЛЬНОЙ ДИАГНОСТИЧЕСКОЙ СИСТЕМЫ В УСЛОВИЯХ ИНТЕГРИРОВАННОЙ МОДУЛЬНОЙ АВИОНИКИ | 2021 |
|
RU2778366C1 |
| СИСТЕМА ФОРМИРОВАНИЯ ТЕХНОЛОГИЧЕСКОГО ГРАФИКА И МАРШРУТНО-ТЕХНОЛОГИЧЕСКИХ КАРТ ВЫПОЛНЕНИЯ ОПЕРАТИВНОГО ТЕХНИЧЕСКОГО ОБСЛУЖИВАНИЯ ГРУППЫ ВОЗДУШНЫХ СУДОВ | 2023 |
|
RU2825239C1 |
| Способ автоматизированного составления технологического графика выполнения регламентных работ на авиационной технике | 2024 |
|
RU2836063C1 |
| СПОСОБ КОНТРОЛЯ ПРОЧНОСТИ И ВИБРАЦИИ СУДНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2363935C1 |
| СПОСОБ РЕКОНФИГУРАЦИИ БОРТОВОГО ОБОРУДОВАНИЯ ВОЗДУШНЫХ СУДОВ ИНТЕГРИРОВАННОЙ МОДУЛЬНОЙ АВИОНИКИ | 2024 |
|
RU2835221C1 |
| ЭКСПЕРТНАЯ СИСТЕМА КОНТРОЛЯ РАБОТЫ БОРТОВОГО ОБОРУДОВАНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2012 |
|
RU2517422C1 |

Способ основан на использовании в нейросетевом классификаторе состояний искусственных нейронных сетей Кохонена для решения задач диагностирования информационно-преобразующих элементов бортового оборудования воздушного судна на основе машинного обучения, а также многослойных однонаправленных искусственных нейронных сетей прямого распространения с сигмоидальной функцией активации нейронов в скрытом слое, и линейной функцией активации нейронов в выходном слое в нейроконтроллере. Способ обеспечивает решение задачи диагностики бортового оборудования, которая позволяет выявить неисправности оборудования. 5 ил.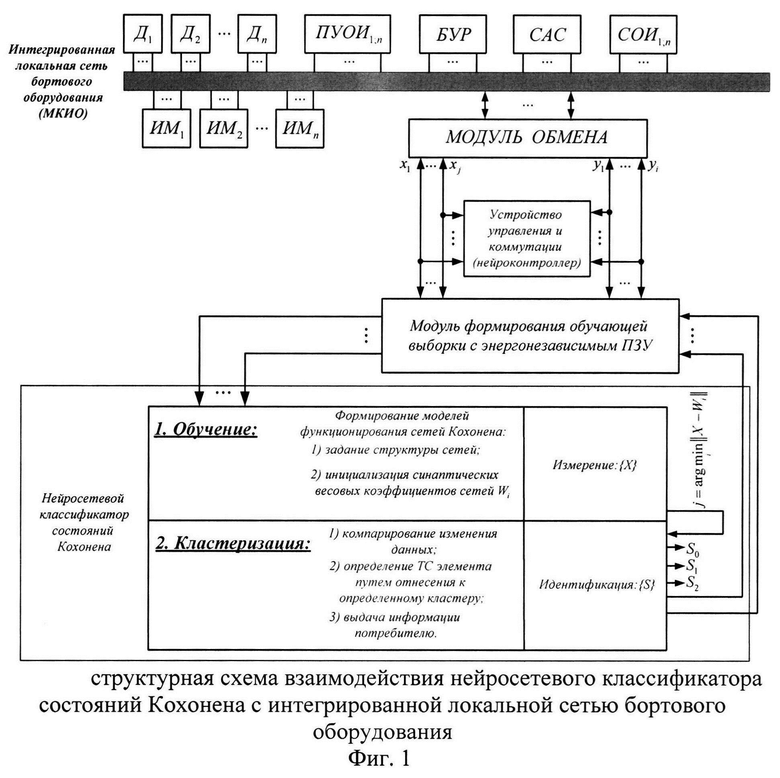
Способ диагностирования информационно-преобразующих элементов бортового оборудования воздушного судна на основе машинного обучения, содержащий этапы, на которых:
с помощью нейросетевого классификатора состояний, представляющего отдельный вычислительный модуль, осуществляют диагностирования технического состояния информационно-преобразующих элементов комплекса бортового оборудования; причем в нейросетевом классификаторе состояний используют алгоритмы функционирования искусственных нейронных сетей Кохонена, а в нейроконтроллере используют многослойные однонаправленные искусственные нейронные сети прямого распространения с сигмоидальной функцией активации нейронов в скрытом слое, и линейной функцией активации нейронов в выходном слое,
распределяют тестовые данные по кластерам, определяющим вид состояния каждого информационно-преобразующего элемента, а именно определяющим область работоспособных состояний, область предотказных состояний и область неработоспособных состояний отказа;
при распределении тестовых данных к кластерам предотказных состояний или состояний отказа фиксируют данное отклонение устройством управления и коммутации, выполненным в виде нейроконтроллера, и подают с помощью нейроконтроллера управляющее воздействие на индикацию с указанием кода системы и кода отказавшего информационно-преобразующего элемента комплекса бортового оборудования,
характеризующийся тем, что для диагностирования информационно-преобразующих элементов комплекса бортового оборудования используют нейросетевой классификатор состояний, предварительно на этапе испытаний комплекса бортового оборудования, прошедший обучение посредством нейроконтроллера, при котором через модуль формирования обучающей выборки, содержащий энергонезависимое постоянное запоминающее устройство, через интегрированную локальную сеть бортового оборудования поступают числовые массивы данных входных и выходных сигналов каждого информационно-преобразующего элемента бортового оборудования, с последующим автоматическим распределением входной информации по формируемым кластерам, определяющим вид состояния каждого информационно-преобразующего элемента, запоминание, включающее создание базы данных, включающих сформированные диагностические модели правильного функционирования информационно-преобразующих элементов комплекса бортового оборудования; отнесение данных контроля к одному из сформированных кластеров состояний, распознавание состояния, а также распределение текущей информации по кластерам.
| Приспособление для беззамкового крепления секций плота к бортовому лежню | 1948 |
|
SU77062A1 |
| МЕТОД РЕЗЕРВИРОВАНИЯ КАНАЛОВ КОНСТРУКТИВНО-ФУНКЦИОНАЛЬНЫХ МОДУЛЕЙ БОРТОВЫХ ЦИФРОВЫХ ВЫЧИСЛИТЕЛЕЙ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА ОСНОВЕ ИНТЕЛЛЕКТУАЛЬНОЙ ДИАГНОСТИЧЕСКОЙ СИСТЕМЫ В УСЛОВИЯХ ИНТЕГРИРОВАННОЙ МОДУЛЬНОЙ АВИОНИКИ | 2021 |
|
RU2778366C1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ СЛУЖЕБНЫХ СИСТЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2559401C1 |
| US 20070073518 А1, 29.03.2007 | |||
| ОБГОННАЯ МУФТА | 0 |
|
SU195798A1 |
